Embed Size (px)
Citation preview

Research ArticleAn Optimal Design Method for Compliant Mechanisms
Ngoc Le Chau1 Ngoc Thoai Tran1 and Thanh-Phong Dao 23
1Faculty of Mechanical Engineering Industrial University of Ho Chi Minh City Ho Chi Minh City Vietnam2Division of Computational Mechatronics Institute for Computational Science Ton Duc $ang UniversityHo Chi Minh City Vietnam3Faculty of Electrical amp Electronics Engineering Ton Duc $ang University Ho Chi Minh City Vietnam
Correspondence should be addressed to anh-Phong Dao daothanhphongtdtueduvn
Received 24 January 2021 Revised 10 February 2021 Accepted 18 February 2021 Published 2 March 2021
Academic Editor Dr Dilbag Singh
Copyright copy 2021 Ngoc Le Chau et alis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Compliant mechanisms are crucial parts in precise engineering but modeling techniques are restricted by a high complexity oftheir mechanical behaviors erefore this paper devotes an optimal design method for compliant mechanisms e integrationmethod is a hybridization of statistics finite element method artificial intelligence and metaheuristics In order to demonstratethe superiority of the method one degree of freedom is considered as a study object Firstly numerical datasets are achieved by thefinite element method Subsequently the main design parameters of the mechanism are identified via analysis of varianceDesirability of both displacement and frequency of the mechanism is determined and then they are embedded inside a fuzzy logicsystem to combine into a single fitness functionen the relationship between the fine design variables and the fitness function ismodeled using the adaptive network-based fuzzy inference system Next the single fitness function is maximized via moth-flameoptimization algorithme optimal results determined that the frequency is 79517Hz and displacement is 1897mm In terms ofdetermining the global optimum solution the current method is compared with the Taguchi desirability and Taguchi-integratedfuzzy methods e results showed that the current method is better than those methods Additionally the devoted methodoutperforms the other metaheuristic algorithms such as TLBO Jaya PSOGSA SCA ALO and LAPO in terms of fasterconvergence e result of this study will be considered to apply for multiple-degrees-of-freedom compliant mechanisms infuture work
1 Introduction
Compliant mechanisms are specific mechanical devicesthe mobility of which is inherently based on elastic energy[1ndash4] Owing to the emerging strengths compliantmechanisms have been receiving a great interest in in-dustrial applications for example gripper [5] printing[6] nanopositioner [7] constant force mechanism [8]multistable equilibrium positions [9] micro-electromechanical systems [10] precision diamondturning [11] and energy harvesting [12] Unlike rigid-body mechanisms compliant mechanisms gain the ex-cellent benefits such as a monolithic structure light-weight free friction and free lubricant On the otherhand rigid-body counterparts make friction and clear-ance thanks to kinematic joints such as revolute
prismatic cylindrical and spherical bearings or gearsmeanwhile compliant mechanism gains smooth motionsBy using rigid links and kinematic joints rigid-bodycounterparts are easily analyzed through the traditionalmachines and mechanism theory [13] On the contrarytheory for analyzing and synthesizing compliant mech-anisms has been facing difficulties thanks to simultaneouscoupling of kinematic and mechanical behaviors Untilnow a lot of different approaches for modeling compliantmechanism have been suggested for example pseudo-rigid-body model [14 15] Castigliano [16] compliance[17] beam theory [18] dynamic stiffness [19] empiricaltechnique [20] constraint-beam model [21] Euler-Ber-noulli [22] and finite element method (FEM) [23] Incomparison with the mentioned methods FEM is a usefultool for solving highly nonlinear problems
HindawiMathematical Problems in EngineeringVolume 2021 Article ID 5599624 18 pageshttpsdoiorg10115520215599624
To fulfill the gap between previous studies and thepresent study an optimal design method is suggested One-degree-of-freedom (DOF) compliant mechanism isemployed as a study example to demonstrate the methodrsquoseffectiveness Regarding a fast tool servo [11] the 1-DOFrequires a large range of displacement and a highly naturalfrequency Besides a small parasitic motion and stress areconsidered as two important constraints Nowadays opti-mization problem for compliant mechanisms can be clas-sified into three main areas topology optimization [24 25]shape optimization and size optimization [22 26 27] In thepresent article a multiobjective optimization (MOO) for the1-DOF mechanism is proposed to improve its responsesPreviously there have been a few studies to deal with theMOO for compliant mechanisms but efficiency of tech-niques is still a challenge [28ndash30]
Moreover there have been different types of optimiza-tion methods to deal with an optimization process Ingeneral a mathematical model is created before imple-menting a MOO problem However the analytical ap-proaches have not been suitable for complex structures Insuch a circumstance data-based approaches are promisingtools which can predict and optimize the performancessimultaneously In order to save manufacturing costs thisarticle proposes a combination of numerical simulationstatistical techniques and metaheuristics in terms of a re-liable and global solution Several approaches can be sum-marized as Taguchi [31] desirability [32] grey relation [33]and Taguchi-fuzzy (TF) [34] but most of them may reach alocal solution On the contrary in order to achieve a globalvalue surrogate model is coupled with metaheuristics esurrogate models include response surface approach[35 36] Kriging [37] neural network [38] fuzzy [39] andadaptive-network-based fuzzy inference system [40]Among them adaptive-network-based fuzzy inferencesystem (ANFIS) is an exact predictor Related to meta-heuristics a variety of different algorithms were proposedsuch as genetic algorithm [41] particle swarm optimization[42] and cuckoo search [43] ese metaheuristics requiretuned parameters such as teaching-learning-based algo-rithm [44] Jaya algorithm [45] and lightning attachmentprocedure optimization [46] However these algorithms arestill limited by a low convergence speed en other met-aheuristics have been proposed to speed up the convergenttime for example moth-flame optimization [47] ant lionoptimizer [48] particle swarm optimization-based gravita-tional search algorithm [49] and sine-cosine algorithm [50]In the present article the moth-flame optimization is chosenfor the 1-DOF mechanism due to its fast convergence
e present paper aims to contribute an optimal designmethod for compliant mechanisms e method undergoessix phases Firstly the nonlinear FEM is utilized to analyze theaforementioned behaviors of the 1-DOF mechanism Sec-ondly some new populations for moth-flame optimizationare discovered by investigating the sensitivity of parametersirdly real values of objective functions are converted intothe desirability to suppress influences of units Subsequentlyfuzzy logic system is developed to bring all desirabilities into asingle fitness function e fitness function is defined as a
combined objective function of multiple performances of the1-DOF mechanism en the relationship among the finegeometrical parameters and the established single fitnessfunction is formulated through ANFIS model Lastly thesingle fitness function is then maximized via the moth-flameoptimization e remainder of this paper is organized asfollows Section 2 presents the computational method Amechanical design of the 1-DOF mechanism is provided inSection 3 Practical implications and discussion are analyzedin Section 4 Conclusions are given in Section 5
2 Optimal Design Method
In order to resolve a MOO for a 1-DOF mechanism anoptimal design framework is given (see in Figure 1) eoptimization procedure is summarized by the followingstages
21 Stage 1 Initial Design In the first stage a draft model ofthe one-DOF mechanism is created In this study thecomputational method is offered to resolve MOO design forthe 1-DOF mechanism Numerical examples are investi-gated involving the usefulness of the developed computa-tional method e optimization process undergoes thefollowing stepwise procedure
Design Description e 1-DOF compliant mechanismshould achieve whole good frequency and displace-ment Additionally a small stress and parasitic motionare two constraints In other words a frequency aims toincrease the response of system A large displacement isexpected to enlarge the range of positioningDesign Variables Geometrical parameters are identi-fied as main design variables for 1-DOF compliantmechanismObjective Functions Two design objectives include thefrequency and the displacement3D Model A 3D model is initialized and then thefrequency displacement parasitic motion and stressare retrieved by finite element analysis (FEA)simulationsNumerically Experimental Design Numerical experi-ments are laid out by Box-Behnken design (BBD)Numerical Dataset Numerical datasets are retrievedthrough simulationsInvestigation of Sensitivity Sensitivity analysis of alldesign variables is to identify several key parametersdirectly affecting both objective functions On the otherhand this step determines design variables again andeliminates some low-significance parameters throughanalysis of variance (ANOVA)Refined Design Variables Main design variables aredetermined again to prepare several new populationspaces for moth-flame optimization algorithmRedesigned Numerical Experiments Numerical exper-iments are built again based on the refined designvariables
2 Mathematical Problems in Engineering
Update 3D Model 3D model is updated correspondingto a new population Subsequently numerical data areretrieved through FEA simulations
22 Stage 2 Computation of Desirability Value e aim ofcalculating the desirability is to suppress influences of dif-ferent units among the frequency (Hz) and the displacement(mm) is stage undergoes some substeps as below
Update Numerical Data Numerical data are retrievedagain based on the refined design variablesDesirability Value e desirability was utilized as apredictor In this paper the exponential type is usede larger-the-better type is used for both objectivefunctions in this article
e larger-the-better type is explained as
Di 0 Flowast leBL
Di Flowast minus BL
BU minus BL
1113888 1113889
r
BL leFlowast leBU
Di 1 Flowast geBU
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(1)
where the desirability is denoted by Di e ith objectivefunction is denoted by Flowast BL and BU are lower range and
upper range of Flowast respectively R is desirability functionindex
23 Stage 3 Modeling by the Fuzzy Logic System e fuzzylogic system [51 52] is employed to change both desir-abilities into a single fitness function en fuzzy inferencesystem (FIS) is then utilized to generate a multiperformancecharacteristic index (MPCI) or the so-called single fitnessfunction is system is illustrated as shown in Figure 1
24 Stage 4 Modeling by ANFIS ANFIS is a popular tech-nique by combining ANN and FIS [53] e purpose ofANFIS model is to model the relations among the refineddesign variables and objective functions (see Figure 1) Inthis paper datasets are divided into 70 for training and30 for testing Performances indexes root mean squareerror (RMSE) and correlation coefficient (R2) are utilized toevaluate the predictor
25 Stage 5 Optimization Algorithm Moth-flame algorithm(MFO) is mimicked by mothrsquos behavior [47] As moths seethe light source they fly in a spiral path MFO has beensuccessfully applied for many engineering areas thanks tosimple usage and fast convergence rate In this paper MFOis extended to reach a global optimal design for the 1-DOF
Design description
Predetermine initial design variables
Define quality responses
FE model
Numerical data
Sensitivity analysis
Eliminate design variables
Refine 3D-finite element model
Recollect numerical data
Compute desirability for output responses
Fuzzier
Inference engine
Defuzzifier Det
erm
ine t
ype
of m
embe
rshi
pfu
nctio
nsFu
zzy
rule
s
Fuzz
y kn
owle
dge b
ase
Modeling phase by fuzzy
Modeling by ANFIS approach Initialize mothprimes population
Calculate error of each moth
Best fitness
Yes
No
Problem statement
MFO algorithm
Design and simulation phase
Desirability aproach
Begin
A1
A2
A3
B1
B2
B3
C1
C2
C3
D1
D2
D3
x1
x2
x3
xn
П
П
N
wn wn
wn fn
w1 f1
y
Layer 1 Layer 2 Layer 3 Layer 4 Layer 5
Sort and assign flame
Update flame number
Calculate distance between mothsand flame
Update constant r and t
Update moth position
Are terminationcriteria
satisfied
End
Iter = Iter + 1
x1xn
x1xn
w1 w1
AdaptiveFixed node
Σ
N
Figure 1 Flowchart of the optimal design method for compliant mechanisms
Mathematical Problems in Engineering 3
mechanism A maximum termination criterion is chosen as105 in this study More details of the MFO can be found inliterature [47] A flowchart of MFO is shown in Figure 1
3 Numerical Study
e proposed 1-DOF mechanism is a potential positionerfor precision system is mechanism is expected to be usedfor a fast tool servo system whose applications can be foundin the literatures [54ndash56] In earlier design phase in order todecrease the cost of a real fabrication process the presentstudy suggests a numerical optimization method for the 1-DOF mechanism
31 Design Description Figures 2(a) and 2(b) show 2D and3D diagrams of 1-DOF compliant mechanism In themiddle the mechanism is fixed holes e mechanism in-cludes three flexure hinges named as FH-1 FH-2 and FH-3Such FHs are connected through rigid linksemechanismincludes an input end (input load F of 25N from an ac-tuator) and an output is used to fix a cutting tool e outputdisplacement moves in vertical direction At the same timeit also moves in horizontal direction so-called parasiticmotion Flexure hinges with rectangular cross section permita large displacement but this is a monolithic structureBecause it is subset of compliant mechanism and works in anelastic limitation of material its motions are largely de-pendent on cross section of FHs therefore this articleoptimizes geometrical parameters of FHs Some significantparameters of the proposed mechanism consist of dimen-sions of FHs [T1 L1 T2 L2 T3 and L3] Remaining pa-rameters (L W and H) are assigned as constant values e1-DOF mechanism is proposed for fast tool servo-assisteddiamond cutting system to produce fined microstructuresurfaces Table 1 gives parameters of the mechanism ismechanism is made by material Al 7075 with yield strengthof 503MPa
32 Numerical Simulation From Figure 2 a load of 25N isemployed to achieve the output response Flexure hinges arerefined two times to reach a good meshing Solid 186 type ofelements is used e results determined that there are 747elements and 5208 nodes as depicted in Figure 3(a) In orderto reach a better accuracy of simulation results Skewnesscriteria are employed e meshing result found that thevalue of this performance metric is about 040684 and thisshows a good meshing quality (see Figure 3(b))
33OptimizationStatement As discussed above the 1-DOFcompliant mechanism is considered for translational ma-nipulators where a high natural frequency over 70Hz a largedisplacement over 17mm a minimal parasitic motionunder 002mm and a good strength are required eoptimization statement is described
Find x [T1 L1 T2 L2 T3 L3]T
Maximizef1(x) (2)
Maximixef2(x) (3)
ey are subject to constraints
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(4)
Initial space of design variables (unit mm) is
072leT1 le 104
145le L1 le 165
045leT2 le 065
225le L2 le 275
054leT3 le 078
18leL3 le 22
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
f1 (x) f2 (x) f3 (x) and f4 (x) represent natural frequencydisplacement parasitic error and stress correspondingly Nis safety factor e ranges of parameters are determinedbased on the experiences in the field and further fabricationcapacity of devices
4 Practical Implications and Discussion
41 Determination of Main Parameters Involving wholeinitial design variables design of numerical experiments isbuilt by BBD technique Table 2 gives initial design pa-rameters and their ranges Each experiment is implementedby simulations e initial results are retrieved in Table 3
Case study 1 focuses on the sensitivity analysis for thenatural frequency In Table 4 the results of ANOVA de-termined that T1 with contribution of 002 and L1 withcontribution of 0 and their p values are 0567 and 0891which are larger than 005e contributions of T1 and L1 arevery small and they are therefore deleted frommodeling andoptimization process Additionally a matrix plot is drawn toshow effects of all parameters on the frequency As seen inFigure 4 it also has a similar conclusion in Table 4 Tosummarize case study 1 deals with the main design pa-rameters including T2 L2 T3 and L3
Case study 2 deals with the sensitivity analysis for dis-placement Based on the ANOVA results in Table 5 theparameterrsquos contributions T1 L1 and L3 are very small with157 133 and 186 respectively
e results of Figure 5 also have the same conclusion inTable 5 It means that the parameters T1 L1 and L3 should besuppressed during modeling and optimization procedure
4 Mathematical Problems in Engineering
42 Modeling and Optimization
421 Determination of MFs Types Table 6 assigns the fuzzyvariables for MFs In this article the frequency and dis-placement desirabilities are two inputs of the FIS e MFstypes for two inputs and an output of the FIS system areillustrated in Figures 6 and 7
422 Investigation on Case Study 1 As discussed in theprevious section overall initial design variables are limitedose factors actually contribute the responses of 1-DOFmechanism Besides spaces of parameters are newly ini-tialized for the modeling and optimization process eoptimization formulation is stated as follows
Find x [T2 L2 T3 L3]T
FH flexure hinge
Rigid linkFH-1
FH-2
FH-3
ActuatorF
L1
T1
T2
T3
L3
L2
L
H
Fixed support
Cutting tool Output
End effector
yx
(a)
W
(b)
Figure 2 (a) 2D diagram and (b) 3D model (unit mm)
Table 1 Parameters
Symbol ValueT1 072mmleT1 le 104mmL1 145mmleL1 le 165mmT2 045mmleT2 le 065mmL2 225leL2 le 275T3 054mmleT3 le 078mmL3 18mmleL3 le 22mmW 10mmH 50mmL 120mm
Refined mesh
Course mesh
(a)
10500
7500
5000
2500
000Num
ber o
f ele
men
ts
000 013 025 038 050 063 075 088 095Element metrics
Hex20Wed15
(b)
Figure 3 Simulation setup (a) meshing process (b) metric distribution of mesh
Mathematical Problems in Engineering 5
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering

To fulfill the gap between previous studies and thepresent study an optimal design method is suggested One-degree-of-freedom (DOF) compliant mechanism isemployed as a study example to demonstrate the methodrsquoseffectiveness Regarding a fast tool servo [11] the 1-DOFrequires a large range of displacement and a highly naturalfrequency Besides a small parasitic motion and stress areconsidered as two important constraints Nowadays opti-mization problem for compliant mechanisms can be clas-sified into three main areas topology optimization [24 25]shape optimization and size optimization [22 26 27] In thepresent article a multiobjective optimization (MOO) for the1-DOF mechanism is proposed to improve its responsesPreviously there have been a few studies to deal with theMOO for compliant mechanisms but efficiency of tech-niques is still a challenge [28ndash30]
Moreover there have been different types of optimiza-tion methods to deal with an optimization process Ingeneral a mathematical model is created before imple-menting a MOO problem However the analytical ap-proaches have not been suitable for complex structures Insuch a circumstance data-based approaches are promisingtools which can predict and optimize the performancessimultaneously In order to save manufacturing costs thisarticle proposes a combination of numerical simulationstatistical techniques and metaheuristics in terms of a re-liable and global solution Several approaches can be sum-marized as Taguchi [31] desirability [32] grey relation [33]and Taguchi-fuzzy (TF) [34] but most of them may reach alocal solution On the contrary in order to achieve a globalvalue surrogate model is coupled with metaheuristics esurrogate models include response surface approach[35 36] Kriging [37] neural network [38] fuzzy [39] andadaptive-network-based fuzzy inference system [40]Among them adaptive-network-based fuzzy inferencesystem (ANFIS) is an exact predictor Related to meta-heuristics a variety of different algorithms were proposedsuch as genetic algorithm [41] particle swarm optimization[42] and cuckoo search [43] ese metaheuristics requiretuned parameters such as teaching-learning-based algo-rithm [44] Jaya algorithm [45] and lightning attachmentprocedure optimization [46] However these algorithms arestill limited by a low convergence speed en other met-aheuristics have been proposed to speed up the convergenttime for example moth-flame optimization [47] ant lionoptimizer [48] particle swarm optimization-based gravita-tional search algorithm [49] and sine-cosine algorithm [50]In the present article the moth-flame optimization is chosenfor the 1-DOF mechanism due to its fast convergence
e present paper aims to contribute an optimal designmethod for compliant mechanisms e method undergoessix phases Firstly the nonlinear FEM is utilized to analyze theaforementioned behaviors of the 1-DOF mechanism Sec-ondly some new populations for moth-flame optimizationare discovered by investigating the sensitivity of parametersirdly real values of objective functions are converted intothe desirability to suppress influences of units Subsequentlyfuzzy logic system is developed to bring all desirabilities into asingle fitness function e fitness function is defined as a
combined objective function of multiple performances of the1-DOF mechanism en the relationship among the finegeometrical parameters and the established single fitnessfunction is formulated through ANFIS model Lastly thesingle fitness function is then maximized via the moth-flameoptimization e remainder of this paper is organized asfollows Section 2 presents the computational method Amechanical design of the 1-DOF mechanism is provided inSection 3 Practical implications and discussion are analyzedin Section 4 Conclusions are given in Section 5
2 Optimal Design Method
In order to resolve a MOO for a 1-DOF mechanism anoptimal design framework is given (see in Figure 1) eoptimization procedure is summarized by the followingstages
21 Stage 1 Initial Design In the first stage a draft model ofthe one-DOF mechanism is created In this study thecomputational method is offered to resolve MOO design forthe 1-DOF mechanism Numerical examples are investi-gated involving the usefulness of the developed computa-tional method e optimization process undergoes thefollowing stepwise procedure
Design Description e 1-DOF compliant mechanismshould achieve whole good frequency and displace-ment Additionally a small stress and parasitic motionare two constraints In other words a frequency aims toincrease the response of system A large displacement isexpected to enlarge the range of positioningDesign Variables Geometrical parameters are identi-fied as main design variables for 1-DOF compliantmechanismObjective Functions Two design objectives include thefrequency and the displacement3D Model A 3D model is initialized and then thefrequency displacement parasitic motion and stressare retrieved by finite element analysis (FEA)simulationsNumerically Experimental Design Numerical experi-ments are laid out by Box-Behnken design (BBD)Numerical Dataset Numerical datasets are retrievedthrough simulationsInvestigation of Sensitivity Sensitivity analysis of alldesign variables is to identify several key parametersdirectly affecting both objective functions On the otherhand this step determines design variables again andeliminates some low-significance parameters throughanalysis of variance (ANOVA)Refined Design Variables Main design variables aredetermined again to prepare several new populationspaces for moth-flame optimization algorithmRedesigned Numerical Experiments Numerical exper-iments are built again based on the refined designvariables
2 Mathematical Problems in Engineering
Update 3D Model 3D model is updated correspondingto a new population Subsequently numerical data areretrieved through FEA simulations
22 Stage 2 Computation of Desirability Value e aim ofcalculating the desirability is to suppress influences of dif-ferent units among the frequency (Hz) and the displacement(mm) is stage undergoes some substeps as below
Update Numerical Data Numerical data are retrievedagain based on the refined design variablesDesirability Value e desirability was utilized as apredictor In this paper the exponential type is usede larger-the-better type is used for both objectivefunctions in this article
e larger-the-better type is explained as
Di 0 Flowast leBL
Di Flowast minus BL
BU minus BL
1113888 1113889
r
BL leFlowast leBU
Di 1 Flowast geBU
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(1)
where the desirability is denoted by Di e ith objectivefunction is denoted by Flowast BL and BU are lower range and
upper range of Flowast respectively R is desirability functionindex
23 Stage 3 Modeling by the Fuzzy Logic System e fuzzylogic system [51 52] is employed to change both desir-abilities into a single fitness function en fuzzy inferencesystem (FIS) is then utilized to generate a multiperformancecharacteristic index (MPCI) or the so-called single fitnessfunction is system is illustrated as shown in Figure 1
24 Stage 4 Modeling by ANFIS ANFIS is a popular tech-nique by combining ANN and FIS [53] e purpose ofANFIS model is to model the relations among the refineddesign variables and objective functions (see Figure 1) Inthis paper datasets are divided into 70 for training and30 for testing Performances indexes root mean squareerror (RMSE) and correlation coefficient (R2) are utilized toevaluate the predictor
25 Stage 5 Optimization Algorithm Moth-flame algorithm(MFO) is mimicked by mothrsquos behavior [47] As moths seethe light source they fly in a spiral path MFO has beensuccessfully applied for many engineering areas thanks tosimple usage and fast convergence rate In this paper MFOis extended to reach a global optimal design for the 1-DOF
Design description
Predetermine initial design variables
Define quality responses
FE model
Numerical data
Sensitivity analysis
Eliminate design variables
Refine 3D-finite element model
Recollect numerical data
Compute desirability for output responses
Fuzzier
Inference engine
Defuzzifier Det
erm
ine t
ype
of m
embe
rshi
pfu
nctio
nsFu
zzy
rule
s
Fuzz
y kn
owle
dge b
ase
Modeling phase by fuzzy
Modeling by ANFIS approach Initialize mothprimes population
Calculate error of each moth
Best fitness
Yes
No
Problem statement
MFO algorithm
Design and simulation phase
Desirability aproach
Begin
A1
A2
A3
B1
B2
B3
C1
C2
C3
D1
D2
D3
x1
x2
x3
xn
П
П
N
wn wn
wn fn
w1 f1
y
Layer 1 Layer 2 Layer 3 Layer 4 Layer 5
Sort and assign flame
Update flame number
Calculate distance between mothsand flame
Update constant r and t
Update moth position
Are terminationcriteria
satisfied
End
Iter = Iter + 1
x1xn
x1xn
w1 w1
AdaptiveFixed node
Σ
N
Figure 1 Flowchart of the optimal design method for compliant mechanisms
Mathematical Problems in Engineering 3
mechanism A maximum termination criterion is chosen as105 in this study More details of the MFO can be found inliterature [47] A flowchart of MFO is shown in Figure 1
3 Numerical Study
e proposed 1-DOF mechanism is a potential positionerfor precision system is mechanism is expected to be usedfor a fast tool servo system whose applications can be foundin the literatures [54ndash56] In earlier design phase in order todecrease the cost of a real fabrication process the presentstudy suggests a numerical optimization method for the 1-DOF mechanism
31 Design Description Figures 2(a) and 2(b) show 2D and3D diagrams of 1-DOF compliant mechanism In themiddle the mechanism is fixed holes e mechanism in-cludes three flexure hinges named as FH-1 FH-2 and FH-3Such FHs are connected through rigid linksemechanismincludes an input end (input load F of 25N from an ac-tuator) and an output is used to fix a cutting tool e outputdisplacement moves in vertical direction At the same timeit also moves in horizontal direction so-called parasiticmotion Flexure hinges with rectangular cross section permita large displacement but this is a monolithic structureBecause it is subset of compliant mechanism and works in anelastic limitation of material its motions are largely de-pendent on cross section of FHs therefore this articleoptimizes geometrical parameters of FHs Some significantparameters of the proposed mechanism consist of dimen-sions of FHs [T1 L1 T2 L2 T3 and L3] Remaining pa-rameters (L W and H) are assigned as constant values e1-DOF mechanism is proposed for fast tool servo-assisteddiamond cutting system to produce fined microstructuresurfaces Table 1 gives parameters of the mechanism ismechanism is made by material Al 7075 with yield strengthof 503MPa
32 Numerical Simulation From Figure 2 a load of 25N isemployed to achieve the output response Flexure hinges arerefined two times to reach a good meshing Solid 186 type ofelements is used e results determined that there are 747elements and 5208 nodes as depicted in Figure 3(a) In orderto reach a better accuracy of simulation results Skewnesscriteria are employed e meshing result found that thevalue of this performance metric is about 040684 and thisshows a good meshing quality (see Figure 3(b))
33OptimizationStatement As discussed above the 1-DOFcompliant mechanism is considered for translational ma-nipulators where a high natural frequency over 70Hz a largedisplacement over 17mm a minimal parasitic motionunder 002mm and a good strength are required eoptimization statement is described
Find x [T1 L1 T2 L2 T3 L3]T
Maximizef1(x) (2)
Maximixef2(x) (3)
ey are subject to constraints
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(4)
Initial space of design variables (unit mm) is
072leT1 le 104
145le L1 le 165
045leT2 le 065
225le L2 le 275
054leT3 le 078
18leL3 le 22
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
f1 (x) f2 (x) f3 (x) and f4 (x) represent natural frequencydisplacement parasitic error and stress correspondingly Nis safety factor e ranges of parameters are determinedbased on the experiences in the field and further fabricationcapacity of devices
4 Practical Implications and Discussion
41 Determination of Main Parameters Involving wholeinitial design variables design of numerical experiments isbuilt by BBD technique Table 2 gives initial design pa-rameters and their ranges Each experiment is implementedby simulations e initial results are retrieved in Table 3
Case study 1 focuses on the sensitivity analysis for thenatural frequency In Table 4 the results of ANOVA de-termined that T1 with contribution of 002 and L1 withcontribution of 0 and their p values are 0567 and 0891which are larger than 005e contributions of T1 and L1 arevery small and they are therefore deleted frommodeling andoptimization process Additionally a matrix plot is drawn toshow effects of all parameters on the frequency As seen inFigure 4 it also has a similar conclusion in Table 4 Tosummarize case study 1 deals with the main design pa-rameters including T2 L2 T3 and L3
Case study 2 deals with the sensitivity analysis for dis-placement Based on the ANOVA results in Table 5 theparameterrsquos contributions T1 L1 and L3 are very small with157 133 and 186 respectively
e results of Figure 5 also have the same conclusion inTable 5 It means that the parameters T1 L1 and L3 should besuppressed during modeling and optimization procedure
4 Mathematical Problems in Engineering
42 Modeling and Optimization
421 Determination of MFs Types Table 6 assigns the fuzzyvariables for MFs In this article the frequency and dis-placement desirabilities are two inputs of the FIS e MFstypes for two inputs and an output of the FIS system areillustrated in Figures 6 and 7
422 Investigation on Case Study 1 As discussed in theprevious section overall initial design variables are limitedose factors actually contribute the responses of 1-DOFmechanism Besides spaces of parameters are newly ini-tialized for the modeling and optimization process eoptimization formulation is stated as follows
Find x [T2 L2 T3 L3]T
FH flexure hinge
Rigid linkFH-1
FH-2
FH-3
ActuatorF
L1
T1
T2
T3
L3
L2
L
H
Fixed support
Cutting tool Output
End effector
yx
(a)
W
(b)
Figure 2 (a) 2D diagram and (b) 3D model (unit mm)
Table 1 Parameters
Symbol ValueT1 072mmleT1 le 104mmL1 145mmleL1 le 165mmT2 045mmleT2 le 065mmL2 225leL2 le 275T3 054mmleT3 le 078mmL3 18mmleL3 le 22mmW 10mmH 50mmL 120mm
Refined mesh
Course mesh
(a)
10500
7500
5000
2500
000Num
ber o
f ele
men
ts
000 013 025 038 050 063 075 088 095Element metrics
Hex20Wed15
(b)
Figure 3 Simulation setup (a) meshing process (b) metric distribution of mesh
Mathematical Problems in Engineering 5
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering

Update 3D Model 3D model is updated correspondingto a new population Subsequently numerical data areretrieved through FEA simulations
22 Stage 2 Computation of Desirability Value e aim ofcalculating the desirability is to suppress influences of dif-ferent units among the frequency (Hz) and the displacement(mm) is stage undergoes some substeps as below
Update Numerical Data Numerical data are retrievedagain based on the refined design variablesDesirability Value e desirability was utilized as apredictor In this paper the exponential type is usede larger-the-better type is used for both objectivefunctions in this article
e larger-the-better type is explained as
Di 0 Flowast leBL
Di Flowast minus BL
BU minus BL
1113888 1113889
r
BL leFlowast leBU
Di 1 Flowast geBU
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(1)
where the desirability is denoted by Di e ith objectivefunction is denoted by Flowast BL and BU are lower range and
upper range of Flowast respectively R is desirability functionindex
23 Stage 3 Modeling by the Fuzzy Logic System e fuzzylogic system [51 52] is employed to change both desir-abilities into a single fitness function en fuzzy inferencesystem (FIS) is then utilized to generate a multiperformancecharacteristic index (MPCI) or the so-called single fitnessfunction is system is illustrated as shown in Figure 1
24 Stage 4 Modeling by ANFIS ANFIS is a popular tech-nique by combining ANN and FIS [53] e purpose ofANFIS model is to model the relations among the refineddesign variables and objective functions (see Figure 1) Inthis paper datasets are divided into 70 for training and30 for testing Performances indexes root mean squareerror (RMSE) and correlation coefficient (R2) are utilized toevaluate the predictor
25 Stage 5 Optimization Algorithm Moth-flame algorithm(MFO) is mimicked by mothrsquos behavior [47] As moths seethe light source they fly in a spiral path MFO has beensuccessfully applied for many engineering areas thanks tosimple usage and fast convergence rate In this paper MFOis extended to reach a global optimal design for the 1-DOF
Design description
Predetermine initial design variables
Define quality responses
FE model
Numerical data
Sensitivity analysis
Eliminate design variables
Refine 3D-finite element model
Recollect numerical data
Compute desirability for output responses
Fuzzier
Inference engine
Defuzzifier Det
erm
ine t
ype
of m
embe
rshi
pfu
nctio
nsFu
zzy
rule
s
Fuzz
y kn
owle
dge b
ase
Modeling phase by fuzzy
Modeling by ANFIS approach Initialize mothprimes population
Calculate error of each moth
Best fitness
Yes
No
Problem statement
MFO algorithm
Design and simulation phase
Desirability aproach
Begin
A1
A2
A3
B1
B2
B3
C1
C2
C3
D1
D2
D3
x1
x2
x3
xn
П
П
N
wn wn
wn fn
w1 f1
y
Layer 1 Layer 2 Layer 3 Layer 4 Layer 5
Sort and assign flame
Update flame number
Calculate distance between mothsand flame
Update constant r and t
Update moth position
Are terminationcriteria
satisfied
End
Iter = Iter + 1
x1xn
x1xn
w1 w1
AdaptiveFixed node
Σ
N
Figure 1 Flowchart of the optimal design method for compliant mechanisms
Mathematical Problems in Engineering 3
mechanism A maximum termination criterion is chosen as105 in this study More details of the MFO can be found inliterature [47] A flowchart of MFO is shown in Figure 1
3 Numerical Study
e proposed 1-DOF mechanism is a potential positionerfor precision system is mechanism is expected to be usedfor a fast tool servo system whose applications can be foundin the literatures [54ndash56] In earlier design phase in order todecrease the cost of a real fabrication process the presentstudy suggests a numerical optimization method for the 1-DOF mechanism
31 Design Description Figures 2(a) and 2(b) show 2D and3D diagrams of 1-DOF compliant mechanism In themiddle the mechanism is fixed holes e mechanism in-cludes three flexure hinges named as FH-1 FH-2 and FH-3Such FHs are connected through rigid linksemechanismincludes an input end (input load F of 25N from an ac-tuator) and an output is used to fix a cutting tool e outputdisplacement moves in vertical direction At the same timeit also moves in horizontal direction so-called parasiticmotion Flexure hinges with rectangular cross section permita large displacement but this is a monolithic structureBecause it is subset of compliant mechanism and works in anelastic limitation of material its motions are largely de-pendent on cross section of FHs therefore this articleoptimizes geometrical parameters of FHs Some significantparameters of the proposed mechanism consist of dimen-sions of FHs [T1 L1 T2 L2 T3 and L3] Remaining pa-rameters (L W and H) are assigned as constant values e1-DOF mechanism is proposed for fast tool servo-assisteddiamond cutting system to produce fined microstructuresurfaces Table 1 gives parameters of the mechanism ismechanism is made by material Al 7075 with yield strengthof 503MPa
32 Numerical Simulation From Figure 2 a load of 25N isemployed to achieve the output response Flexure hinges arerefined two times to reach a good meshing Solid 186 type ofelements is used e results determined that there are 747elements and 5208 nodes as depicted in Figure 3(a) In orderto reach a better accuracy of simulation results Skewnesscriteria are employed e meshing result found that thevalue of this performance metric is about 040684 and thisshows a good meshing quality (see Figure 3(b))
33OptimizationStatement As discussed above the 1-DOFcompliant mechanism is considered for translational ma-nipulators where a high natural frequency over 70Hz a largedisplacement over 17mm a minimal parasitic motionunder 002mm and a good strength are required eoptimization statement is described
Find x [T1 L1 T2 L2 T3 L3]T
Maximizef1(x) (2)
Maximixef2(x) (3)
ey are subject to constraints
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(4)
Initial space of design variables (unit mm) is
072leT1 le 104
145le L1 le 165
045leT2 le 065
225le L2 le 275
054leT3 le 078
18leL3 le 22
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
f1 (x) f2 (x) f3 (x) and f4 (x) represent natural frequencydisplacement parasitic error and stress correspondingly Nis safety factor e ranges of parameters are determinedbased on the experiences in the field and further fabricationcapacity of devices
4 Practical Implications and Discussion
41 Determination of Main Parameters Involving wholeinitial design variables design of numerical experiments isbuilt by BBD technique Table 2 gives initial design pa-rameters and their ranges Each experiment is implementedby simulations e initial results are retrieved in Table 3
Case study 1 focuses on the sensitivity analysis for thenatural frequency In Table 4 the results of ANOVA de-termined that T1 with contribution of 002 and L1 withcontribution of 0 and their p values are 0567 and 0891which are larger than 005e contributions of T1 and L1 arevery small and they are therefore deleted frommodeling andoptimization process Additionally a matrix plot is drawn toshow effects of all parameters on the frequency As seen inFigure 4 it also has a similar conclusion in Table 4 Tosummarize case study 1 deals with the main design pa-rameters including T2 L2 T3 and L3
Case study 2 deals with the sensitivity analysis for dis-placement Based on the ANOVA results in Table 5 theparameterrsquos contributions T1 L1 and L3 are very small with157 133 and 186 respectively
e results of Figure 5 also have the same conclusion inTable 5 It means that the parameters T1 L1 and L3 should besuppressed during modeling and optimization procedure
4 Mathematical Problems in Engineering
42 Modeling and Optimization
421 Determination of MFs Types Table 6 assigns the fuzzyvariables for MFs In this article the frequency and dis-placement desirabilities are two inputs of the FIS e MFstypes for two inputs and an output of the FIS system areillustrated in Figures 6 and 7
422 Investigation on Case Study 1 As discussed in theprevious section overall initial design variables are limitedose factors actually contribute the responses of 1-DOFmechanism Besides spaces of parameters are newly ini-tialized for the modeling and optimization process eoptimization formulation is stated as follows
Find x [T2 L2 T3 L3]T
FH flexure hinge
Rigid linkFH-1
FH-2
FH-3
ActuatorF
L1
T1
T2
T3
L3
L2
L
H
Fixed support
Cutting tool Output
End effector
yx
(a)
W
(b)
Figure 2 (a) 2D diagram and (b) 3D model (unit mm)
Table 1 Parameters
Symbol ValueT1 072mmleT1 le 104mmL1 145mmleL1 le 165mmT2 045mmleT2 le 065mmL2 225leL2 le 275T3 054mmleT3 le 078mmL3 18mmleL3 le 22mmW 10mmH 50mmL 120mm
Refined mesh
Course mesh
(a)
10500
7500
5000
2500
000Num
ber o
f ele
men
ts
000 013 025 038 050 063 075 088 095Element metrics
Hex20Wed15
(b)
Figure 3 Simulation setup (a) meshing process (b) metric distribution of mesh
Mathematical Problems in Engineering 5
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering

mechanism A maximum termination criterion is chosen as105 in this study More details of the MFO can be found inliterature [47] A flowchart of MFO is shown in Figure 1
3 Numerical Study
e proposed 1-DOF mechanism is a potential positionerfor precision system is mechanism is expected to be usedfor a fast tool servo system whose applications can be foundin the literatures [54ndash56] In earlier design phase in order todecrease the cost of a real fabrication process the presentstudy suggests a numerical optimization method for the 1-DOF mechanism
31 Design Description Figures 2(a) and 2(b) show 2D and3D diagrams of 1-DOF compliant mechanism In themiddle the mechanism is fixed holes e mechanism in-cludes three flexure hinges named as FH-1 FH-2 and FH-3Such FHs are connected through rigid linksemechanismincludes an input end (input load F of 25N from an ac-tuator) and an output is used to fix a cutting tool e outputdisplacement moves in vertical direction At the same timeit also moves in horizontal direction so-called parasiticmotion Flexure hinges with rectangular cross section permita large displacement but this is a monolithic structureBecause it is subset of compliant mechanism and works in anelastic limitation of material its motions are largely de-pendent on cross section of FHs therefore this articleoptimizes geometrical parameters of FHs Some significantparameters of the proposed mechanism consist of dimen-sions of FHs [T1 L1 T2 L2 T3 and L3] Remaining pa-rameters (L W and H) are assigned as constant values e1-DOF mechanism is proposed for fast tool servo-assisteddiamond cutting system to produce fined microstructuresurfaces Table 1 gives parameters of the mechanism ismechanism is made by material Al 7075 with yield strengthof 503MPa
32 Numerical Simulation From Figure 2 a load of 25N isemployed to achieve the output response Flexure hinges arerefined two times to reach a good meshing Solid 186 type ofelements is used e results determined that there are 747elements and 5208 nodes as depicted in Figure 3(a) In orderto reach a better accuracy of simulation results Skewnesscriteria are employed e meshing result found that thevalue of this performance metric is about 040684 and thisshows a good meshing quality (see Figure 3(b))
33OptimizationStatement As discussed above the 1-DOFcompliant mechanism is considered for translational ma-nipulators where a high natural frequency over 70Hz a largedisplacement over 17mm a minimal parasitic motionunder 002mm and a good strength are required eoptimization statement is described
Find x [T1 L1 T2 L2 T3 L3]T
Maximizef1(x) (2)
Maximixef2(x) (3)
ey are subject to constraints
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(4)
Initial space of design variables (unit mm) is
072leT1 le 104
145le L1 le 165
045leT2 le 065
225le L2 le 275
054leT3 le 078
18leL3 le 22
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(5)
f1 (x) f2 (x) f3 (x) and f4 (x) represent natural frequencydisplacement parasitic error and stress correspondingly Nis safety factor e ranges of parameters are determinedbased on the experiences in the field and further fabricationcapacity of devices
4 Practical Implications and Discussion
41 Determination of Main Parameters Involving wholeinitial design variables design of numerical experiments isbuilt by BBD technique Table 2 gives initial design pa-rameters and their ranges Each experiment is implementedby simulations e initial results are retrieved in Table 3
Case study 1 focuses on the sensitivity analysis for thenatural frequency In Table 4 the results of ANOVA de-termined that T1 with contribution of 002 and L1 withcontribution of 0 and their p values are 0567 and 0891which are larger than 005e contributions of T1 and L1 arevery small and they are therefore deleted frommodeling andoptimization process Additionally a matrix plot is drawn toshow effects of all parameters on the frequency As seen inFigure 4 it also has a similar conclusion in Table 4 Tosummarize case study 1 deals with the main design pa-rameters including T2 L2 T3 and L3
Case study 2 deals with the sensitivity analysis for dis-placement Based on the ANOVA results in Table 5 theparameterrsquos contributions T1 L1 and L3 are very small with157 133 and 186 respectively
e results of Figure 5 also have the same conclusion inTable 5 It means that the parameters T1 L1 and L3 should besuppressed during modeling and optimization procedure
4 Mathematical Problems in Engineering
42 Modeling and Optimization
421 Determination of MFs Types Table 6 assigns the fuzzyvariables for MFs In this article the frequency and dis-placement desirabilities are two inputs of the FIS e MFstypes for two inputs and an output of the FIS system areillustrated in Figures 6 and 7
422 Investigation on Case Study 1 As discussed in theprevious section overall initial design variables are limitedose factors actually contribute the responses of 1-DOFmechanism Besides spaces of parameters are newly ini-tialized for the modeling and optimization process eoptimization formulation is stated as follows
Find x [T2 L2 T3 L3]T
FH flexure hinge
Rigid linkFH-1
FH-2
FH-3
ActuatorF
L1
T1
T2
T3
L3
L2
L
H
Fixed support
Cutting tool Output
End effector
yx
(a)
W
(b)
Figure 2 (a) 2D diagram and (b) 3D model (unit mm)
Table 1 Parameters
Symbol ValueT1 072mmleT1 le 104mmL1 145mmleL1 le 165mmT2 045mmleT2 le 065mmL2 225leL2 le 275T3 054mmleT3 le 078mmL3 18mmleL3 le 22mmW 10mmH 50mmL 120mm
Refined mesh
Course mesh
(a)
10500
7500
5000
2500
000Num
ber o
f ele
men
ts
000 013 025 038 050 063 075 088 095Element metrics
Hex20Wed15
(b)
Figure 3 Simulation setup (a) meshing process (b) metric distribution of mesh
Mathematical Problems in Engineering 5
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
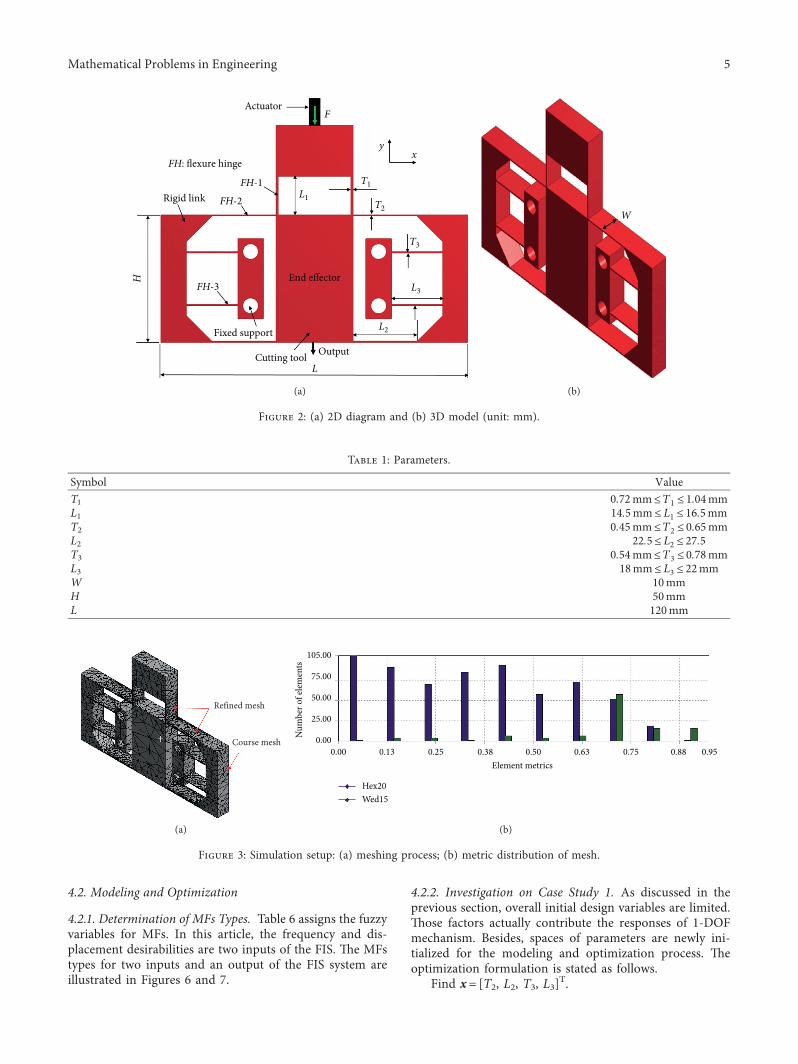
42 Modeling and Optimization
421 Determination of MFs Types Table 6 assigns the fuzzyvariables for MFs In this article the frequency and dis-placement desirabilities are two inputs of the FIS e MFstypes for two inputs and an output of the FIS system areillustrated in Figures 6 and 7
422 Investigation on Case Study 1 As discussed in theprevious section overall initial design variables are limitedose factors actually contribute the responses of 1-DOFmechanism Besides spaces of parameters are newly ini-tialized for the modeling and optimization process eoptimization formulation is stated as follows
Find x [T2 L2 T3 L3]T
FH flexure hinge
Rigid linkFH-1
FH-2
FH-3
ActuatorF
L1
T1
T2
T3
L3
L2
L
H
Fixed support
Cutting tool Output
End effector
yx
(a)
W
(b)
Figure 2 (a) 2D diagram and (b) 3D model (unit mm)
Table 1 Parameters
Symbol ValueT1 072mmleT1 le 104mmL1 145mmleL1 le 165mmT2 045mmleT2 le 065mmL2 225leL2 le 275T3 054mmleT3 le 078mmL3 18mmleL3 le 22mmW 10mmH 50mmL 120mm
Refined mesh
Course mesh
(a)
10500
7500
5000
2500
000Num
ber o
f ele
men
ts
000 013 025 038 050 063 075 088 095Element metrics
Hex20Wed15
(b)
Figure 3 Simulation setup (a) meshing process (b) metric distribution of mesh
Mathematical Problems in Engineering 5
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
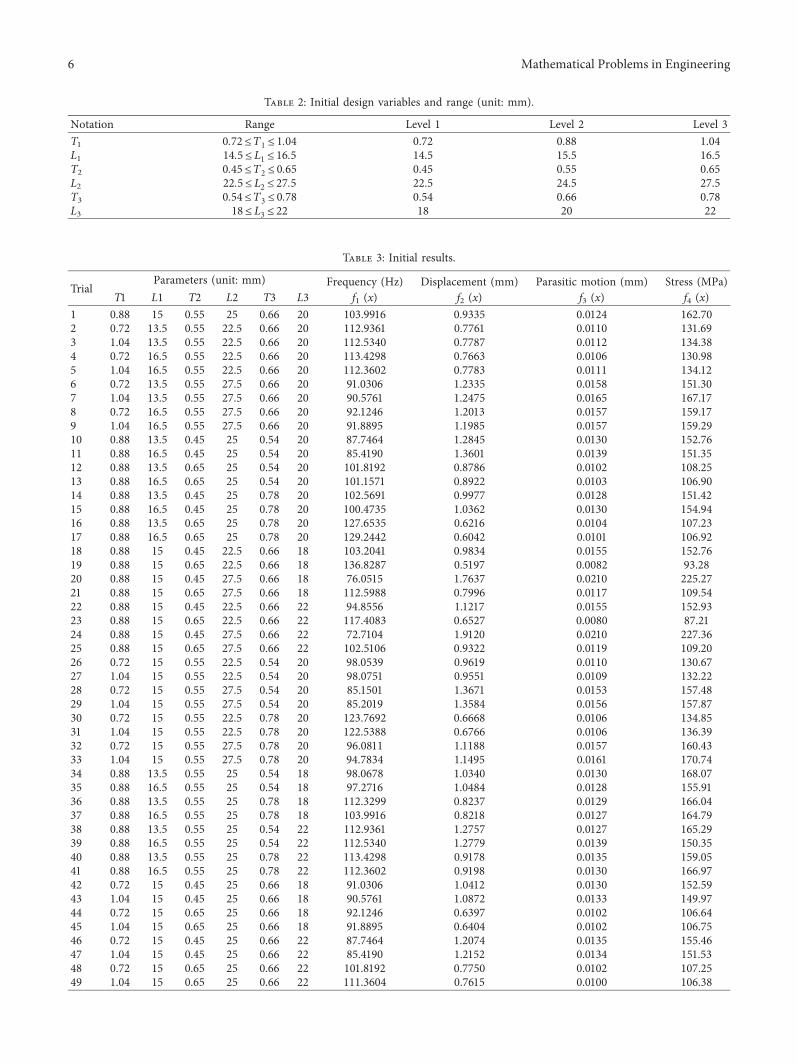
Table 2 Initial design variables and range (unit mm)
Notation Range Level 1 Level 2 Level 3T1 072leT1 le 104 072 088 104L1 145leL1 le 165 145 155 165T2 045leT2 le 065 045 055 065L2 225leL2 le 275 225 245 275T3 054leT3 le 078 054 066 078L3 18leL3 le 22 18 20 22
Table 3 Initial results
TrialParameters (unit mm) Frequency (Hz) Displacement (mm) Parasitic motion (mm) Stress (MPa)
T1 L1 T2 L2 T3 L3 f1 (x) f2 (x) f3 (x) f4 (x)1 088 15 055 25 066 20 1039916 09335 00124 162702 072 135 055 225 066 20 1129361 07761 00110 131693 104 135 055 225 066 20 1125340 07787 00112 134384 072 165 055 225 066 20 1134298 07663 00106 130985 104 165 055 225 066 20 1123602 07783 00111 134126 072 135 055 275 066 20 910306 12335 00158 151307 104 135 055 275 066 20 905761 12475 00165 167178 072 165 055 275 066 20 921246 12013 00157 159179 104 165 055 275 066 20 918895 11985 00157 1592910 088 135 045 25 054 20 877464 12845 00130 1527611 088 165 045 25 054 20 854190 13601 00139 1513512 088 135 065 25 054 20 1018192 08786 00102 1082513 088 165 065 25 054 20 1011571 08922 00103 1069014 088 135 045 25 078 20 1025691 09977 00128 1514215 088 165 045 25 078 20 1004735 10362 00130 1549416 088 135 065 25 078 20 1276535 06216 00104 1072317 088 165 065 25 078 20 1292442 06042 00101 1069218 088 15 045 225 066 18 1032041 09834 00155 1527619 088 15 065 225 066 18 1368287 05197 00082 932820 088 15 045 275 066 18 760515 17637 00210 2252721 088 15 065 275 066 18 1125988 07996 00117 1095422 088 15 045 225 066 22 948556 11217 00155 1529323 088 15 065 225 066 22 1174083 06527 00080 872124 088 15 045 275 066 22 727104 19120 00210 2273625 088 15 065 275 066 22 1025106 09322 00119 1092026 072 15 055 225 054 20 980539 09619 00110 1306727 104 15 055 225 054 20 980751 09551 00109 1322228 072 15 055 275 054 20 851501 13671 00153 1574829 104 15 055 275 054 20 852019 13584 00156 1578730 072 15 055 225 078 20 1237692 06668 00106 1348531 104 15 055 225 078 20 1225388 06766 00106 1363932 072 15 055 275 078 20 960811 11188 00157 1604333 104 15 055 275 078 20 947834 11495 00161 1707434 088 135 055 25 054 18 980678 10340 00130 1680735 088 165 055 25 054 18 972716 10484 00128 1559136 088 135 055 25 078 18 1123299 08237 00129 1660437 088 165 055 25 078 18 1039916 08218 00127 1647938 088 135 055 25 054 22 1129361 12757 00127 1652939 088 165 055 25 054 22 1125340 12779 00139 1503540 088 135 055 25 078 22 1134298 09178 00135 1590541 088 165 055 25 078 22 1123602 09198 00130 1669742 072 15 045 25 066 18 910306 10412 00130 1525943 104 15 045 25 066 18 905761 10872 00133 1499744 072 15 065 25 066 18 921246 06397 00102 1066445 104 15 065 25 066 18 918895 06404 00102 1067546 072 15 045 25 066 22 877464 12074 00135 1554647 104 15 045 25 066 22 854190 12152 00134 1515348 072 15 065 25 066 22 1018192 07750 00102 1072549 104 15 065 25 066 22 1113604 07615 00100 10638
6 Mathematical Problems in Engineering
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
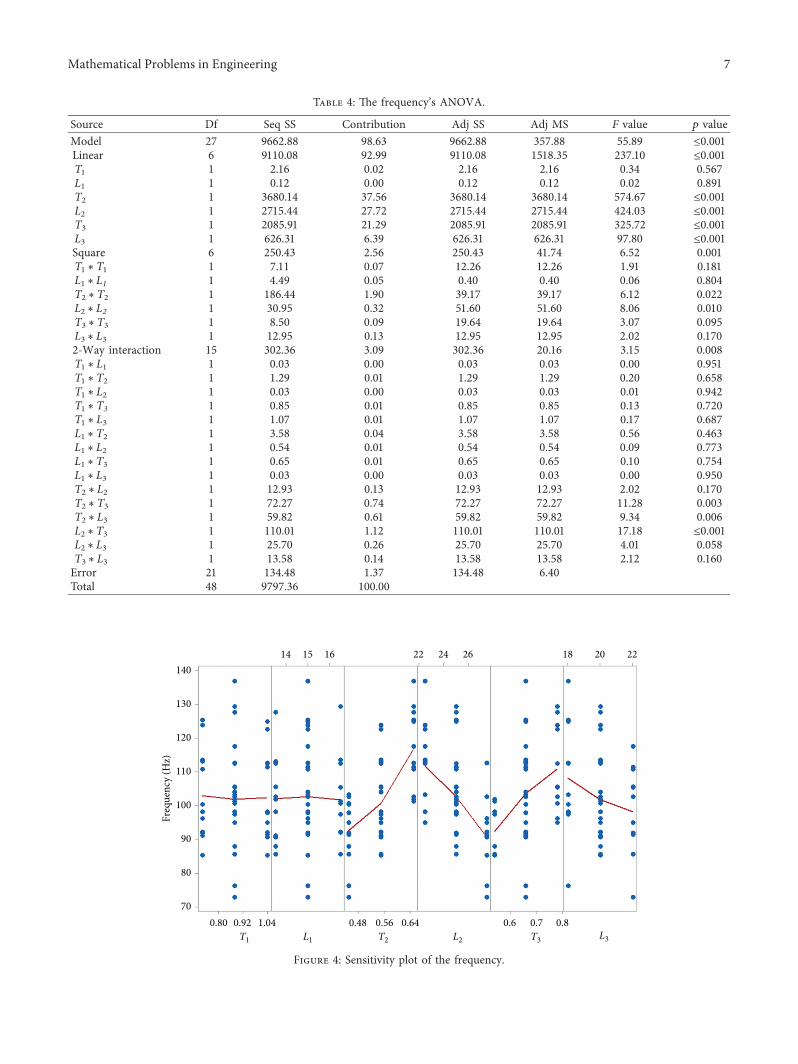
Table 4 e frequencyrsquos ANOVA
Source Df Seq SS Contribution Adj SS Adj MS F value p valueModel 27 966288 9863 966288 35788 5589 le0001Linear 6 911008 9299 911008 151835 23710 le0001T1 1 216 002 216 216 034 0567L1 1 012 000 012 012 002 0891T2 1 368014 3756 368014 368014 57467 le0001L2 1 271544 2772 271544 271544 42403 le0001T3 1 208591 2129 208591 208591 32572 le0001L3 1 62631 639 62631 62631 9780 le0001Square 6 25043 256 25043 4174 652 0001T1lowastT1 1 711 007 1226 1226 191 0181L1lowast L1 1 449 005 040 040 006 0804T2lowastT2 1 18644 190 3917 3917 612 0022L2lowast L2 1 3095 032 5160 5160 806 0010T3lowastT3 1 850 009 1964 1964 307 0095L3lowast L3 1 1295 013 1295 1295 202 01702-Way interaction 15 30236 309 30236 2016 315 0008T1lowast L1 1 003 000 003 003 000 0951T1lowastT2 1 129 001 129 129 020 0658T1lowast L2 1 003 000 003 003 001 0942T1lowastT3 1 085 001 085 085 013 0720T1lowast L3 1 107 001 107 107 017 0687L1lowastT2 1 358 004 358 358 056 0463L1lowast L2 1 054 001 054 054 009 0773L1lowastT3 1 065 001 065 065 010 0754L1lowast L3 1 003 000 003 003 000 0950T2lowast L2 1 1293 013 1293 1293 202 0170T2lowastT3 1 7227 074 7227 7227 1128 0003T2lowast L3 1 5982 061 5982 5982 934 0006L2lowastT3 1 11001 112 11001 11001 1718 le0001L2lowast L3 1 2570 026 2570 2570 401 0058T3lowast L3 1 1358 014 1358 1358 212 0160Error 21 13448 137 13448 640Total 48 979736 10000
140
130
120
110
100
90
80
70
Freq
uenc
y (H
z)
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 22
Figure 4 Sensitivity plot of the frequency
Mathematical Problems in Engineering 7
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
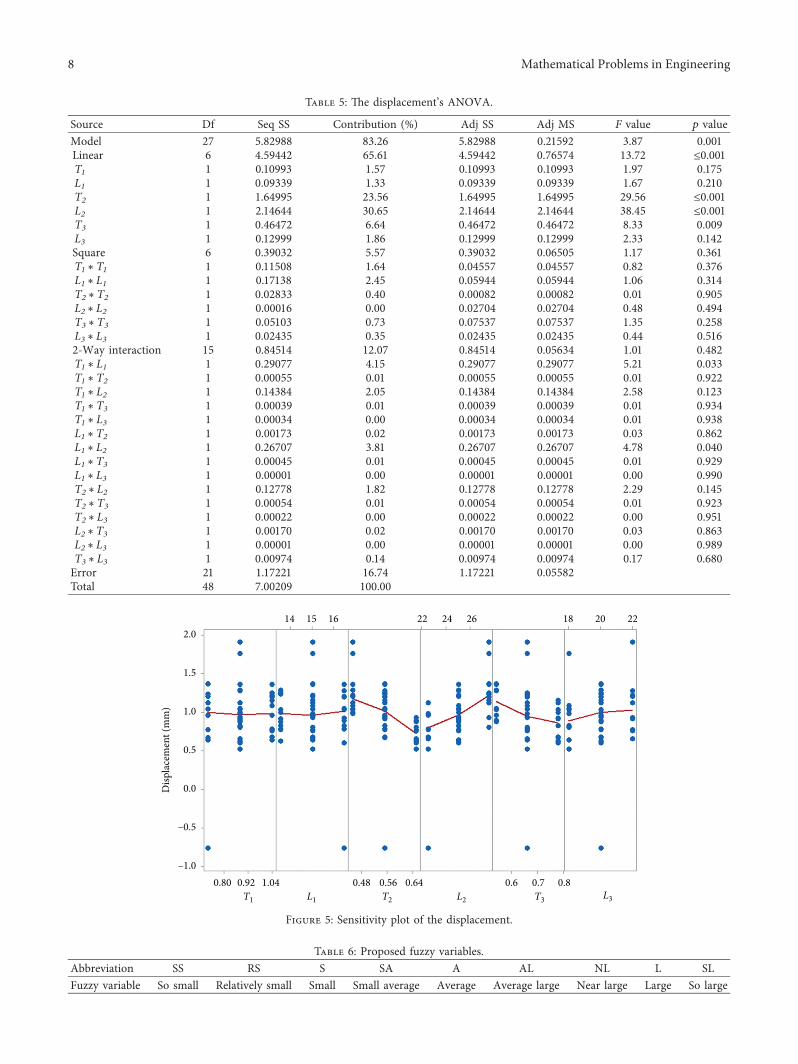
Table 5 e displacementrsquos ANOVA
Source Df Seq SS Contribution () Adj SS Adj MS F value p valueModel 27 582988 8326 582988 021592 387 0001Linear 6 459442 6561 459442 076574 1372 le0001T1 1 010993 157 010993 010993 197 0175L1 1 009339 133 009339 009339 167 0210T2 1 164995 2356 164995 164995 2956 le0001L2 1 214644 3065 214644 214644 3845 le0001T3 1 046472 664 046472 046472 833 0009L3 1 012999 186 012999 012999 233 0142Square 6 039032 557 039032 006505 117 0361T1lowastT1 1 011508 164 004557 004557 082 0376L1lowast L1 1 017138 245 005944 005944 106 0314T2lowastT2 1 002833 040 000082 000082 001 0905L2lowast L2 1 000016 000 002704 002704 048 0494T3lowastT3 1 005103 073 007537 007537 135 0258L3lowast L3 1 002435 035 002435 002435 044 05162-Way interaction 15 084514 1207 084514 005634 101 0482T1lowast L1 1 029077 415 029077 029077 521 0033T1lowastT2 1 000055 001 000055 000055 001 0922T1lowast L2 1 014384 205 014384 014384 258 0123T1lowastT3 1 000039 001 000039 000039 001 0934T1lowast L3 1 000034 000 000034 000034 001 0938L1lowastT2 1 000173 002 000173 000173 003 0862L1lowast L2 1 026707 381 026707 026707 478 0040L1lowastT3 1 000045 001 000045 000045 001 0929L1lowast L3 1 000001 000 000001 000001 000 0990T2lowast L2 1 012778 182 012778 012778 229 0145T2lowastT3 1 000054 001 000054 000054 001 0923T2lowast L3 1 000022 000 000022 000022 000 0951L2lowastT3 1 000170 002 000170 000170 003 0863L2lowast L3 1 000001 000 000001 000001 000 0989T3lowast L3 1 000974 014 000974 000974 017 0680Error 21 117221 1674 117221 005582Total 48 700209 10000
080 092 104T1 L1 T2 L2 T3 L3
048 056 064 06 07 08
14 15 16 22 24 26 18 20 2220
15
10
05
00
ndash05
ndash10
Disp
lace
men
t (m
m)
Figure 5 Sensitivity plot of the displacement
Table 6 Proposed fuzzy variablesAbbreviation SS RS S SA A AL NL L SLFuzzy variable So small Relatively small Small Small average Average Average large Near large Large So large
8 Mathematical Problems in Engineering
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
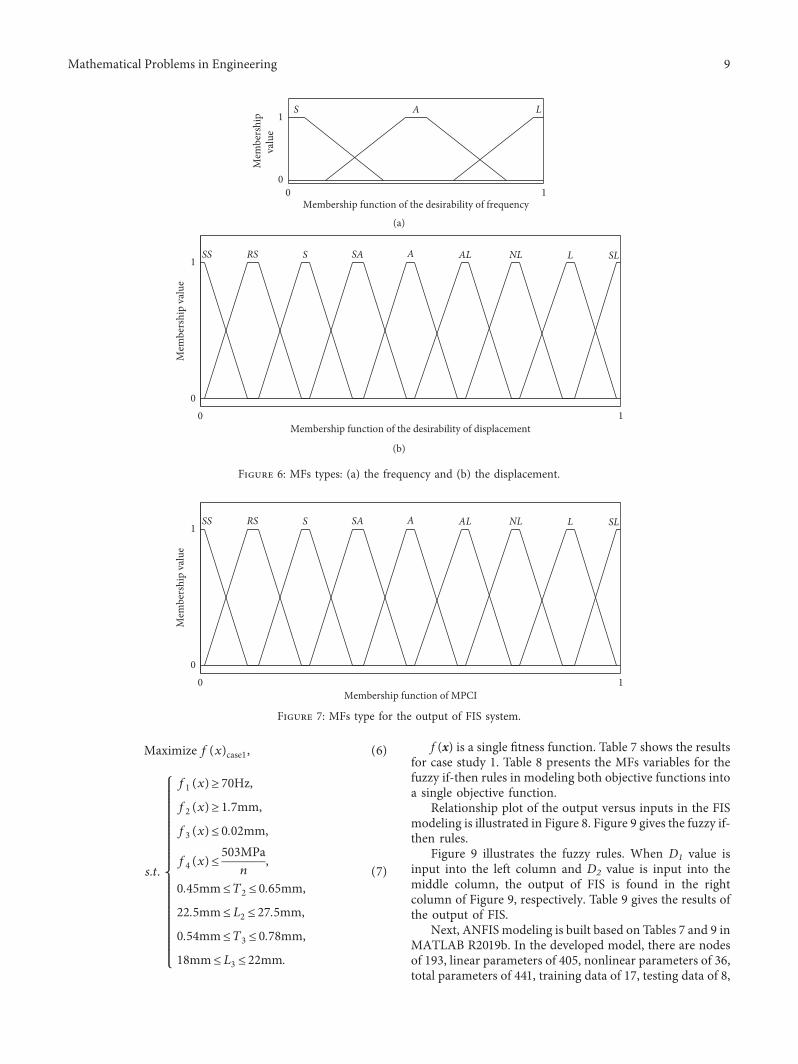
Maximizef(x)case1 (6)
st
f1(x)ge 70Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
18mmleL3 le 22mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(7)
f (x) is a single fitness function Table 7 shows the resultsfor case study 1 Table 8 presents the MFs variables for thefuzzy if-then rules in modeling both objective functions intoa single objective function
Relationship plot of the output versus inputs in the FISmodeling is illustrated in Figure 8 Figure 9 gives the fuzzy if-then rules
Figure 9 illustrates the fuzzy rules When D1 value isinput into the left column and D2 value is input into themiddle column the output of FIS is found in the rightcolumn of Figure 9 respectively Table 9 gives the results ofthe output of FIS
Next ANFIS modeling is built based on Tables 7 and 9 inMATLAB R2019b In the developed model there are nodesof 193 linear parameters of 405 nonlinear parameters of 36total parameters of 441 training data of 17 testing data of 8
0
1
0 1
S A L
Mem
bers
hip
valu
e
Membership function of the desirability of frequency
(a)
Membership function of the desirability of displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
(b)
Figure 6 MFs types (a) the frequency and (b) the displacement
SS RS S SA A AL NL L SL
0 10
1
Mem
bers
hip
valu
e
Membership function of MPCI
Figure 7 MFs type for the output of FIS system
Mathematical Problems in Engineering 9
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
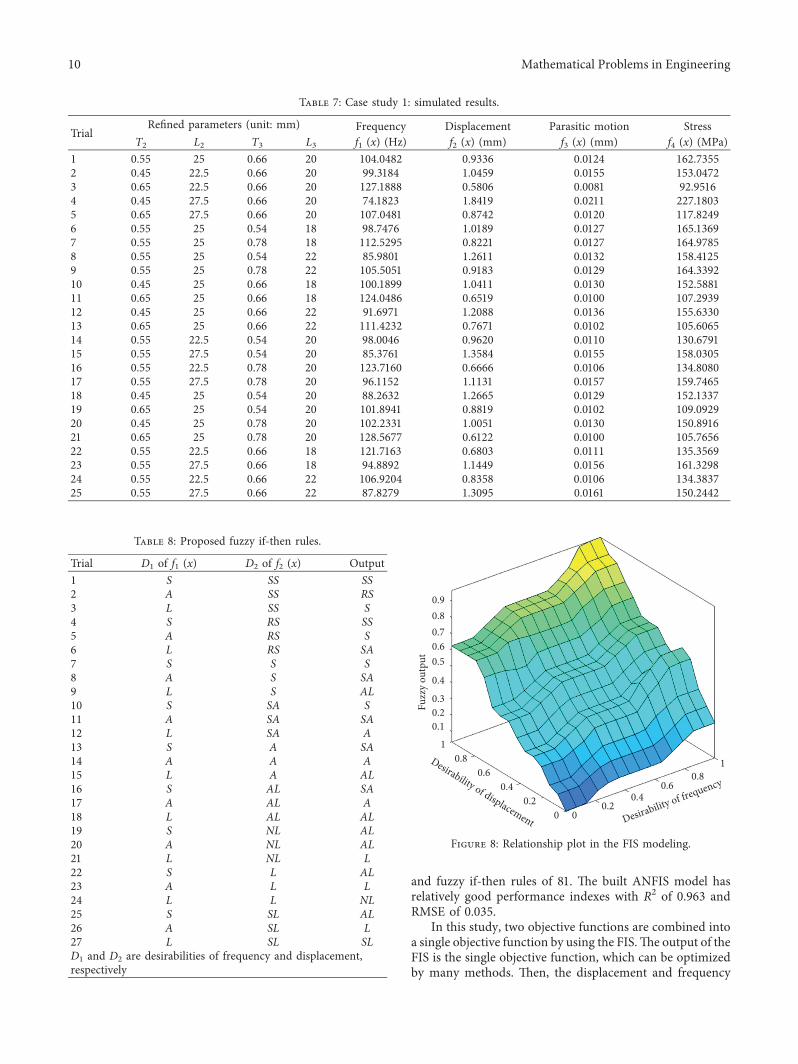
and fuzzy if-then rules of 81 e built ANFIS model hasrelatively good performance indexes with R2 of 0963 andRMSE of 0035
In this study two objective functions are combined intoa single objective function by using the FISe output of theFIS is the single objective function which can be optimizedby many methods en the displacement and frequency
Table 7 Case study 1 simulated results
TrialRefined parameters (unit mm) Frequency Displacement Parasitic motion Stress
T2 L2 T3 L3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)1 055 25 066 20 1040482 09336 00124 16273552 045 225 066 20 993184 10459 00155 15304723 065 225 066 20 1271888 05806 00081 9295164 045 275 066 20 741823 18419 00211 22718035 065 275 066 20 1070481 08742 00120 11782496 055 25 054 18 987476 10189 00127 16513697 055 25 078 18 1125295 08221 00127 16497858 055 25 054 22 859801 12611 00132 15841259 055 25 078 22 1055051 09183 00129 164339210 045 25 066 18 1001899 10411 00130 152588111 065 25 066 18 1240486 06519 00100 107293912 045 25 066 22 916971 12088 00136 155633013 065 25 066 22 1114232 07671 00102 105606514 055 225 054 20 980046 09620 00110 130679115 055 275 054 20 853761 13584 00155 158030516 055 225 078 20 1237160 06666 00106 134808017 055 275 078 20 961152 11131 00157 159746518 045 25 054 20 882632 12665 00129 152133719 065 25 054 20 1018941 08819 00102 109092920 045 25 078 20 1022331 10051 00130 150891621 065 25 078 20 1285677 06122 00100 105765622 055 225 066 18 1217163 06803 00111 135356923 055 275 066 18 948892 11449 00156 161329824 055 225 066 22 1069204 08358 00106 134383725 055 275 066 22 878279 13095 00161 1502442
Table 8 Proposed fuzzy if-then rules
Trial D1 of f1 (x) D2 of f2 (x) Output1 S SS SS2 A SS RS3 L SS S4 S RS SS5 A RS S6 L RS SA7 S S S8 A S SA9 L S AL10 S SA S11 A SA SA12 L SA A13 S A SA14 A A A15 L A AL16 S AL SA17 A AL A18 L AL AL19 S NL AL20 A NL AL21 L NL L22 S L AL23 A L L24 L L NL25 S SL AL26 A SL L27 L SL SLD1 and D2 are desirabilities of frequency and displacementrespectively
Desirability of displacement Desirability of frequency
Fuzz
y ou
tput
010203
04
0506070809
1
0
0406
08
020
0204
0608
1
Figure 8 Relationship plot in the FIS modeling
10 Mathematical Problems in Engineering
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
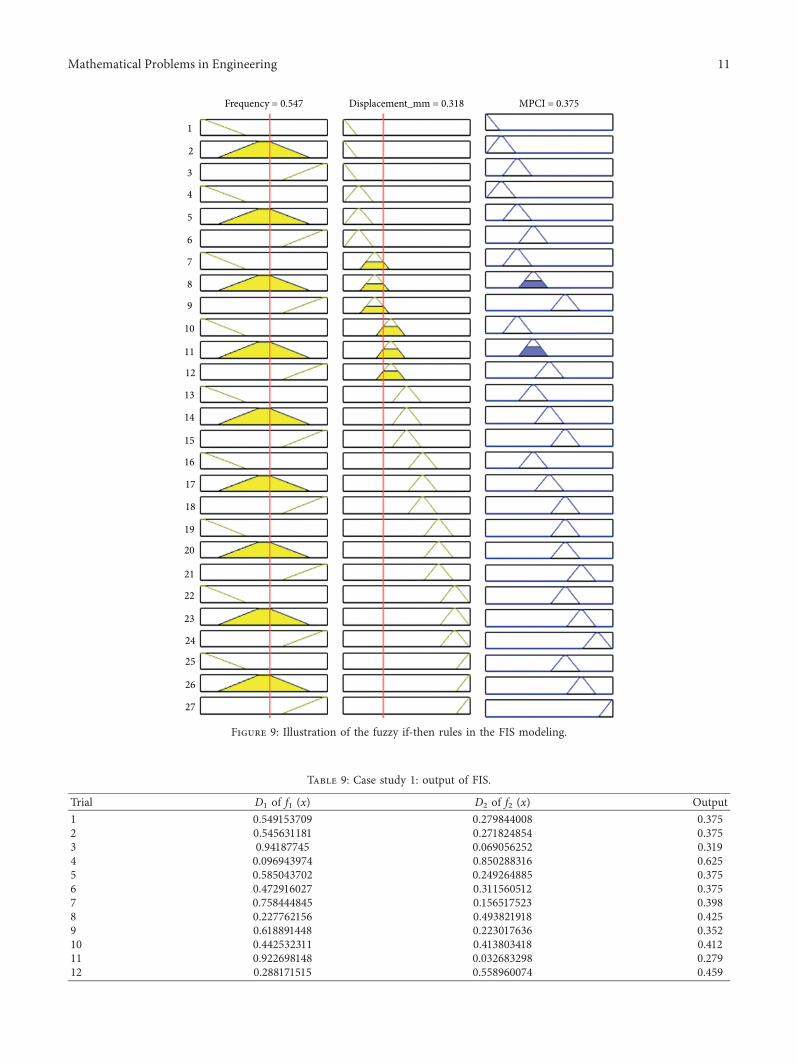
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
Frequency = 0547 Displacement_mm = 0318 MPCI = 0375
Figure 9 Illustration of the fuzzy if-then rules in the FIS modeling
Table 9 Case study 1 output of FIS
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0545631181 0271824854 03753 094187745 0069056252 03194 0096943974 0850288316 06255 0585043702 0249264885 03756 0472916027 0311560512 03757 0758444845 0156517523 03988 0227762156 0493821918 04259 0618891448 0223017636 035210 0442532311 0413803418 041211 0922698148 0032683298 027912 0288171515 0558960074 0459
Mathematical Problems in Engineering 11
can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering

can be predicted based on the optimal design variablesSpecifically Taguchi can optimize the single fitness functionbut may trap a local optimum value meanwhile MFO al-gorithm can search a global optimum value Hence theoptimal values from the Taguchi are compared with thosefound by the proposed methodrsquos framework e purpose ofthis comparison is to clearly demonstrate the usefulness ofthe devoted method in searching the global solution
In Table 10 the optimal parameters by the TF includeT2 045mm L2 275mm T3 054mm and L3 20mme results of TF show the frequency displacement parasiticerror and stress are approximately 75871Hz and 1776mm0019mm and 212114MPa respectively However thoseoptimal values can trap local optimum solutions To find aglobal optimum solution moth-flame optimization algo-rithm is adopted e results of the hybrid computationalmethod determine T2 045mm L2 275mmT3 078mm and L3 18mm (Table 10) e frequencydisplacement parasitic error and stress are about 85174Hzand 2447mm 0016mm and 145982MPa respectivelyFurthermore the MPCI in the hybrid computationalmethod is better than that in TF It means that the hybridcomputational method outperformed the TF
423 Investigation on Case Study 2 Initialized from Table 5and Figure 7 the space of design parameters is also limited togenerate a new population for the modeling and optimizationprocedure e optimization formulation is stated as follows
Search x [T2 L2 T3]T
Maximizef(x)case 2 (8)
st
f1(x)ge 17Hz
f2(x)ge 17mm
f3(x)le 002mm
f4(x)le503MPa
n
045mmleT2 le 065mm
225mmle L2 le 275mm
054mmleT3 le 078mm
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨
⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
(9)
Table 11 gives the results of 13 numerical experimentsincluding the frequency the displacement the parasiticmotion and stress e desirabilities are calculated(Table 12)
Subsequently the fuzzy if-then rules are built based onTable 8 and the output of FIS system is given in Table 12
In this ANFIS model there are nodes of 34 linear pa-rameters of 32 nonlinear parameters of 18 total parametersof 50 training data of 9 testing data of 4 and fuzzy if-thenrules of 8 e developed ANFIS modeling achieves rela-tively good performance indexes with R2 of 0954 and RMSEof 0012
Using TF the optimal parameters are T2 045mmL2 275mm and T3 066mm (Table 13) e frequencydisplacement parasitic error and stress are about 79460Hz1637mm 0018mm and 198015MPa respectively esafety factor is determined to be about 254 e optimalsolutions are local solutions
In Table 13 using the hybrid computational method theoptimal parameters are T2 045mm L2 275mm andT3 069mm e optimal frequency displacement para-sitic error equivalent stress and safety factor are 76743Hz1700mm 0019mm 236027MPa and 2131 respectivelyIt is noted that the MPCI in the hybrid computationalmethod is also better than that in the TF
43 Discussion In the previous sections the sensitivity offactors on the output responses is analyzed to redeterminethe main geometrical parameters ose parameters con-tribute directly the frequency displacement parasitic mo-tion and stress of 1-DOF mechanism Two numericalexamples are studied In order to calculate an error amongthe predicted value (Rp) and simulation (Rs) the error (E) iscalculated as
E() Rp minus Rs
Rs
minus 11113888 1113889lowast 100 (10)
A comparison with case 1 is performed Using thecomputational method the error is around 7 for case study1 and 38 for case 2 On the contrary using TF the error is23 for case 1 and 147 for case 2 (Table 14) Additionallythe computational methodology can reach a global solution
Table 9 Continued
Trial D1 of f1 (x) D2 of f2 (x) Output13 0692351675 013628816 028114 0438830692 0297635129 037515 017371882 0657096979 04516 0914808353 0064837296 031517 037439927 046404754 046618 0221158841 0613630915 042219 0546539128 0215051828 034320 0442695186 0404024209 0421 1 0 02522 0841975976 0098401988 033523 0368106025 0474134093 047824 0578512868 0219178805 034825 0246861864 0602118795 0436
12 Mathematical Problems in Engineering
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
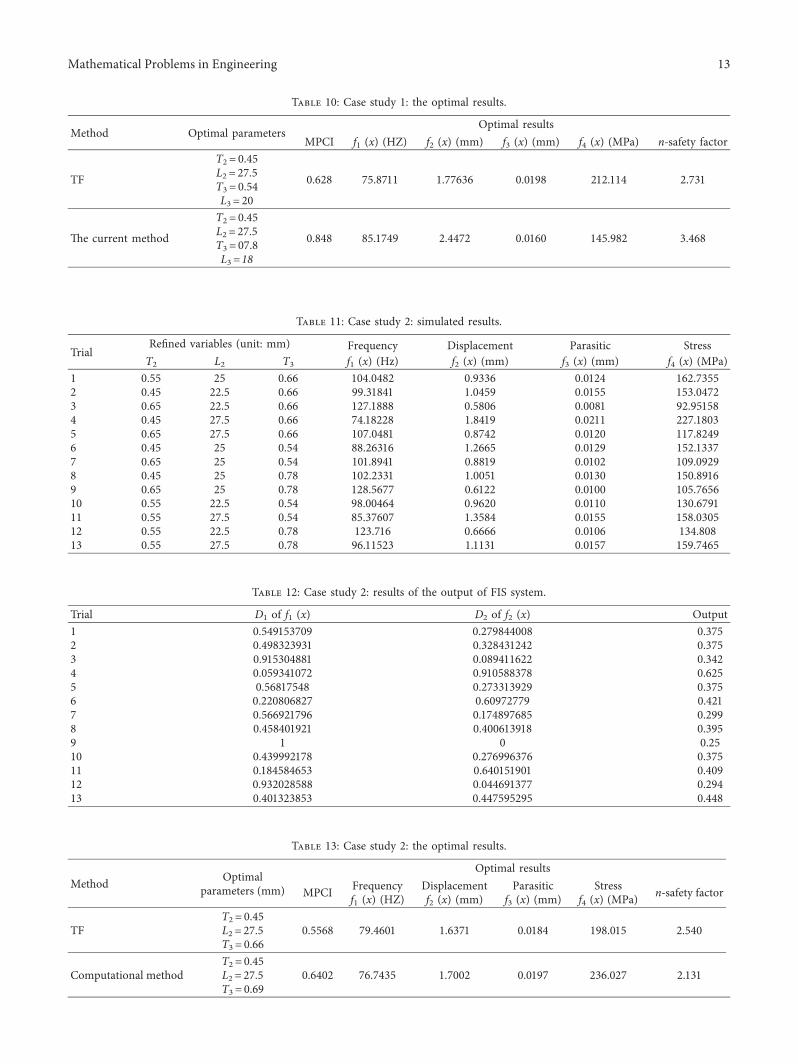
Table 10 Case study 1 the optimal results
Method Optimal parametersOptimal results
MPCI f1 (x) (HZ) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n-safety factor
TF
T2 045
0628 758711 177636 00198 212114 2731L2 275T3 054L3 20
e current method
T2 045
0848 851749 24472 00160 145982 3468L2 275T3 078L3 18
Table 11 Case study 2 simulated results
TrialRefined variables (unit mm) Frequency Displacement Parasitic StressT2 L2 T3 f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)
1 055 25 066 1040482 09336 00124 16273552 045 225 066 9931841 10459 00155 15304723 065 225 066 1271888 05806 00081 92951584 045 275 066 7418228 18419 00211 22718035 065 275 066 1070481 08742 00120 11782496 045 25 054 8826316 12665 00129 15213377 065 25 054 1018941 08819 00102 10909298 045 25 078 1022331 10051 00130 15089169 065 25 078 1285677 06122 00100 105765610 055 225 054 9800464 09620 00110 130679111 055 275 054 8537607 13584 00155 158030512 055 225 078 123716 06666 00106 13480813 055 275 078 9611523 11131 00157 1597465
Table 12 Case study 2 results of the output of FIS system
Trial D1 of f1 (x) D2 of f2 (x) Output1 0549153709 0279844008 03752 0498323931 0328431242 03753 0915304881 0089411622 03424 0059341072 0910588378 06255 056817548 0273313929 03756 0220806827 060972779 04217 0566921796 0174897685 02998 0458401921 0400613918 03959 1 0 02510 0439992178 0276996376 037511 0184584653 0640151901 040912 0932028588 0044691377 029413 0401323853 0447595295 0448
Table 13 Case study 2 the optimal results
Method Optimalparameters (mm)
Optimal results
MPCI Frequencyf1 (x) (HZ)
Displacementf2 (x) (mm)
Parasiticf3 (x) (mm)
Stressf4 (x) (MPa) n-safety factor
TFT2 045
05568 794601 16371 00184 198015 2540L2 275T3 066
Computational methodT2 045
06402 767435 17002 00197 236027 2131L2 275T3 069
Mathematical Problems in Engineering 13
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
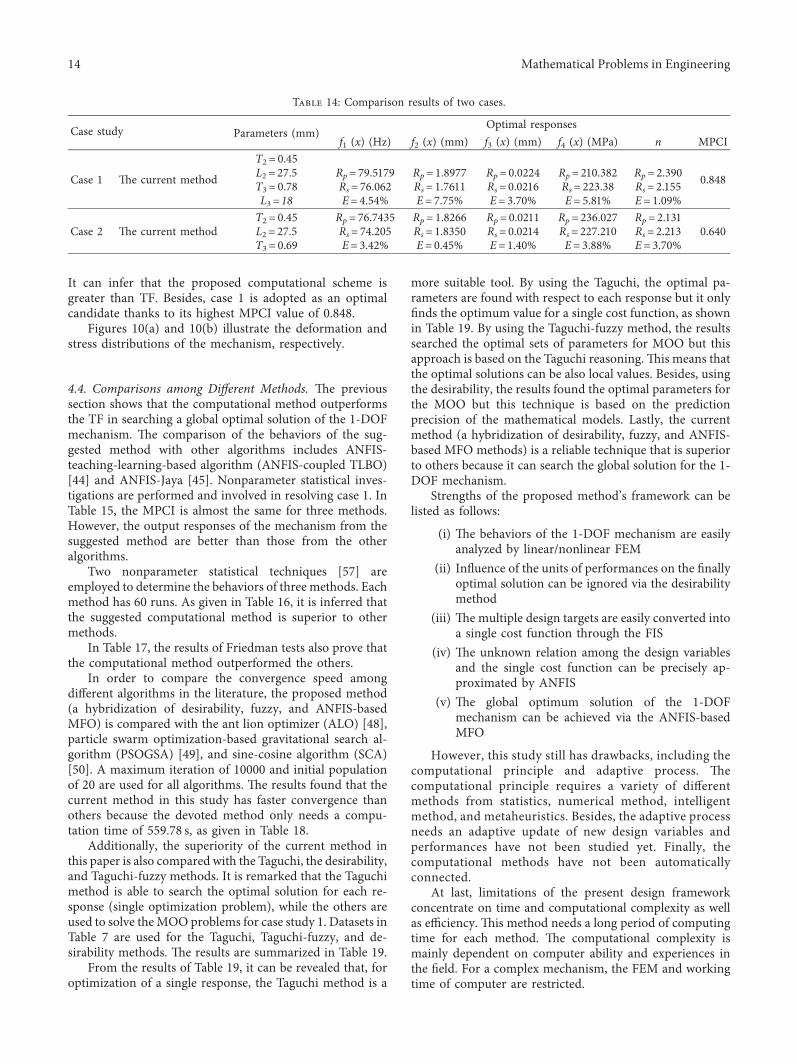
It can infer that the proposed computational scheme isgreater than TF Besides case 1 is adopted as an optimalcandidate thanks to its highest MPCI value of 0848
Figures 10(a) and 10(b) illustrate the deformation andstress distributions of the mechanism respectively
44 Comparisons among Different Methods e previoussection shows that the computational method outperformsthe TF in searching a global optimal solution of the 1-DOFmechanism e comparison of the behaviors of the sug-gested method with other algorithms includes ANFIS-teaching-learning-based algorithm (ANFIS-coupled TLBO)[44] and ANFIS-Jaya [45] Nonparameter statistical inves-tigations are performed and involved in resolving case 1 InTable 15 the MPCI is almost the same for three methodsHowever the output responses of the mechanism from thesuggested method are better than those from the otheralgorithms
Two nonparameter statistical techniques [57] areemployed to determine the behaviors of three methods Eachmethod has 60 runs As given in Table 16 it is inferred thatthe suggested computational method is superior to othermethods
In Table 17 the results of Friedman tests also prove thatthe computational method outperformed the others
In order to compare the convergence speed amongdifferent algorithms in the literature the proposed method(a hybridization of desirability fuzzy and ANFIS-basedMFO) is compared with the ant lion optimizer (ALO) [48]particle swarm optimization-based gravitational search al-gorithm (PSOGSA) [49] and sine-cosine algorithm (SCA)[50] A maximum iteration of 10000 and initial populationof 20 are used for all algorithms e results found that thecurrent method in this study has faster convergence thanothers because the devoted method only needs a compu-tation time of 55978 s as given in Table 18
Additionally the superiority of the current method inthis paper is also compared with the Taguchi the desirabilityand Taguchi-fuzzy methods It is remarked that the Taguchimethod is able to search the optimal solution for each re-sponse (single optimization problem) while the others areused to solve theMOOproblems for case study 1 Datasets inTable 7 are used for the Taguchi Taguchi-fuzzy and de-sirability methods e results are summarized in Table 19
From the results of Table 19 it can be revealed that foroptimization of a single response the Taguchi method is a
more suitable tool By using the Taguchi the optimal pa-rameters are found with respect to each response but it onlyfinds the optimum value for a single cost function as shownin Table 19 By using the Taguchi-fuzzy method the resultssearched the optimal sets of parameters for MOO but thisapproach is based on the Taguchi reasoningis means thatthe optimal solutions can be also local values Besides usingthe desirability the results found the optimal parameters forthe MOO but this technique is based on the predictionprecision of the mathematical models Lastly the currentmethod (a hybridization of desirability fuzzy and ANFIS-based MFO methods) is a reliable technique that is superiorto others because it can search the global solution for the 1-DOF mechanism
Strengths of the proposed methodrsquos framework can belisted as follows
(i) e behaviors of the 1-DOF mechanism are easilyanalyzed by linearnonlinear FEM
(ii) Influence of the units of performances on the finallyoptimal solution can be ignored via the desirabilitymethod
(iii) e multiple design targets are easily converted intoa single cost function through the FIS
(iv) e unknown relation among the design variablesand the single cost function can be precisely ap-proximated by ANFIS
(v) e global optimum solution of the 1-DOFmechanism can be achieved via the ANFIS-basedMFO
However this study still has drawbacks including thecomputational principle and adaptive process ecomputational principle requires a variety of differentmethods from statistics numerical method intelligentmethod and metaheuristics Besides the adaptive processneeds an adaptive update of new design variables andperformances have not been studied yet Finally thecomputational methods have not been automaticallyconnected
At last limitations of the present design frameworkconcentrate on time and computational complexity as wellas efficiency is method needs a long period of computingtime for each method e computational complexity ismainly dependent on computer ability and experiences inthe field For a complex mechanism the FEM and workingtime of computer are restricted
Table 14 Comparison results of two cases
Case study Parameters (mm)Optimal responses
f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa) n MPCI
Case 1 e current method
T2 045
0848L2 275 Rp 795179 Rp 18977 Rp 00224 Rp 210382 Rp 2390T3 078 Rs 76062 Rs 17611 Rs 00216 Rs 22338 Rs 2155L3 18 E 454 E 775 E 370 E 581 E 109
Case 2 e current methodT2 045 Rp 767435 Rp 18266 Rp 00211 Rp 236027 Rp 2131
0640L2 275 Rs 74205 Rs 18350 Rs 00214 Rs 227210 Rs 2213T3 069 E 342 E 045 E 140 E 388 E 370
14 Mathematical Problems in Engineering
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
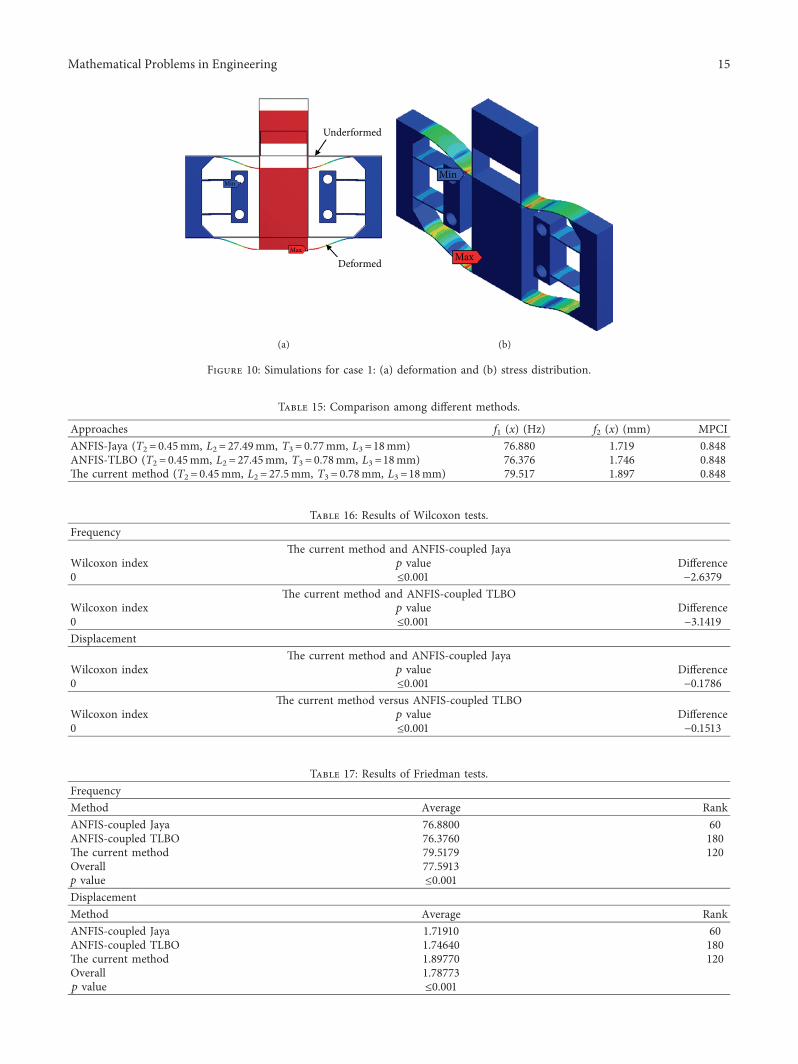
Underformed
DeformedMax
Min
(a)
Max
Min
(b)
Figure 10 Simulations for case 1 (a) deformation and (b) stress distribution
Table 15 Comparison among different methods
Approaches f1 (x) (Hz) f2 (x) (mm) MPCIANFIS-Jaya (T2 045mm L2 2749mm T3 077mm L3 18mm) 76880 1719 0848ANFIS-TLBO (T2 045mm L2 2745mm T3 078mm L3 18mm) 76376 1746 0848e current method (T2 045mm L2 275mm T3 078mm L3 18mm) 79517 1897 0848
Table 16 Results of Wilcoxon testsFrequency
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus26379
e current method and ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus31419Displacement
e current method and ANFIS-coupled JayaWilcoxon index p value Difference0 le0001 minus01786
e current method versus ANFIS-coupled TLBOWilcoxon index p value Difference0 le0001 minus01513
Table 17 Results of Friedman testsFrequencyMethod Average RankANFIS-coupled Jaya 768800 60ANFIS-coupled TLBO 763760 180e current method 795179 120Overall 775913p value le0001DisplacementMethod Average RankANFIS-coupled Jaya 171910 60ANFIS-coupled TLBO 174640 180e current method 189770 120Overall 178773p value le0001
Mathematical Problems in Engineering 15
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
5 Conclusions
is paper proposed the computational method and itsapplication in design optimization of compliant mecha-nismse 1-DOF compliant mechanism is used as the studyobject e suggested method is a hybridization of statisticsFEM artificial intelligence and metaheuristics e use-fulness of the suggested method is tested through the nu-merical examples and statistical comparisons An initial 3Dmodel in FEM is designed and the numerical datasets areretrieved by FEA ANOVA is used to redetermine two finespaces of parameters so-called populations in MFO Basedon the refined datasets the desirabilities of the frequencyand displacement are brought into the FIS system where twoobjective functions become a single objective functionthrough establishment of the fuzzy if-then rules ANFIS isthen established as predictor involving the refined param-eters and the output of FIS In order to reach a globaloptimization MFO algorithm is utilized to deal with theoutput of FIS e results found that the frequency is79517Hz and displacement is 1897mm for the 1-DOFmechanism e devoted method is better than the TaguchiTaguchi-integrated fuzzy and desirability methods becauseit can search a global solution
In finding the global optimum solution the suggestedmethod is a better technique in comparison with theTaguchi desirability and Taguchi-integrated fuzzy methodsBesides the devoted method outperforms the other meta-heuristic algorithms such as TLBO and Jaya in terms of
better performances Also the devoted method is superior toPSOGSA SCA ALO and LAPO in terms of fasterconvergence
In future work experiments are carried out to verify theoptimized results e current method will be extended tooptimization problems with multiple constraints Besidesthe proposed method will be also considered to apply formulti-DOF compliant mechanisms
Data Availability
e data used to support the findings of this study are in-cluded within the article
Conflicts of Interest
e authors declare that they have no conflicts of interest
Acknowledgments
is research was funded by the Vietnam National Foun-dation for Science and Technology Development(NAFOSTED) under Grant no 10701ndash201914
References
[1] D N Nguyen T Dao N Le Chau and V A Dang HybridApproach of Finite Element Method Kigring Metamodel andMultiobjective Genetic Algorithm for Computational Optimi-zation of a Flexure Elbow Joint for Upper-Limb Assistive
Table 19 Comparison among the current method Taguchi method and Taguchi-fuzzy method
Method Optimal results
Taguchi (single optimization)Parameters (mm)
T2 065 T2 045 T2 065 T2 065L2 225 L2 275 L2 225 L2 225T3 078 T3 054 T3 078 T3 066L3 18 L3 22 L3 18 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 139474 1760 0008 90405
Taguchi-fuzzy (MOO)Parameters (mm) T2 045 L2 275 T3 054 L3 20
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 75871 1776 0019 212114
Desirability (MOO)Parameters (mm) T2 065 L2 225 T3 054 L3 2127
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 106841 0930 0011 120090
e current method (MOO)Parameters (mm) T2 045 L2 275 T3 078 L3 18
Response f1 (x) (Hz) f2 (x) (mm) f3 (x) (mm) f4 (x) (MPa)Value 79517 1897 0022 210382
Table 18 Statistical results for comparison among metaheuristic methods
MethodResults
Time (s)Frequency (Hz) Displacement (mm)
ANFIS-coupled PSOGSA 79421 1892 616038ANFIS-coupled SCA 79426 1895 599544ANFIS-coupled ALO 79425 1893 62320ANFIS-coupled LAPO 79517 1897 270775e current method 79517 1897 55978
16 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
Device Springer Berlin Germany 2019 httpswwwspringercomengineeringelectronicsj
[2] M Ling S Chen Q Li and G Tian ldquoDynamic stiffnessmatrix for free vibration analysis of flexure hinges based onnon-uniform Timoshenko beamrdquo Journal of Sound and Vi-bration vol 437 pp 40ndash52 2018
[3] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 2016
[4] M Ling J Cao Z Jiang and Q Li ldquoDevelopment of amultistage compliant mechanism with new boundary con-straintrdquo Review of Scientific Instruments vol 89 2018
[5] R K Jain S Majumder B Ghosh and S Saha ldquoDesign andmanufacturing of mobile micro manipulation system with acompliant piezoelectric actuator based micro gripperrdquoJournal of Manufacturing Systems vol 35 pp 76ndash91 2015
[6] X Zhou H Xu J Cheng N Zhao and S C Chen ldquoFlexure-based Roll-to-roll Platform a practical solution for realizinglarge-area microcontact printingrdquo Scientific Reports vol 5pp 1ndash10 2015
[7] S Polit and J Dong ldquoDevelopment of a high-bandwidth XYnanopositioning stage for high-rate micro-nano-manufacturingrdquo Institute of Electrical and Electronics Engi-neersAmerican Society of Mechanical Engineers Transactionson Mechatronics vol 16 no 4 pp 724ndash733 2011
[8] P Wang and Q Xu ldquoDesign and modeling of constant-forcemechanisms a surveyrdquo Mechanism and Machine $eoryvol 119 pp 1ndash21 2018
[9] Y S Oh and S Kota ldquoSynthesis of multistable equilibriumcompliant mechanisms using combinations of bistableMechanismsrdquo Journal of Mechanical Design vol 131pp 0210021ndash02100211 2009
[10] S Kota J Joo Z Li S M Rodgers and J Sniegowski ldquoDesignof compliant mechanisms applications to MEMS analogintegrrdquo Analog Integrated Circuits and Signal Processingvol 29 no 12 pp 7ndash15 2001
[11] S Rakuff and J F Cuttino ldquoDesign and testing of a long-range precision fast tool servo system for diamond turningrdquoPrecision Engineering vol 33 no 1 pp 18ndash25 2009
[12] J Granstrom J Feenstra H A Sodano and K FarinholtldquoEnergy harvesting from a backpack instrumented with pi-ezoelectric shoulder strapsrdquo Smart Materials and Structuresvol 16 no 5 pp 1810ndash1820 2007
[13] J J Uicker G R Pennock J E Shigley and J M McCarthyldquoeory of machines and mechanismsrdquo $e Journal of Me-chanical Design vol 125 no 3 p 650 2003
[14] A Midha L L Howell and T W Norton ldquoLimit positions ofcompliant mechanisms using the pseudo-rigid-body modelconceptrdquo Mechanism and Machine $eory vol 35 no 1pp 99ndash115 2000
[15] L L Howell Compliant Mechanisms John Wiley amp SonsHoboken NJ USA 2011
[16] N Lobontiu Nicolae Lobontiu-Compliant Mechanisms_ De-sign of Flexure Hinges CRC Press Boca Raton FL USA 2002
[17] Y Koseki T Tanikawa N Koyachi and T Arai ldquoKinematicanalysis of a translational 3-dof micro-parallel mechanismusing the matrix methodrdquo Advanced Robotics vol 16 no 3pp 251ndash264 2002
[18] M Ling J Cao Z Jiang and J Lin ldquoeoretical modeling ofattenuated displacement amplification for multistage com-pliant mechanism and its applicationrdquo Sensors and ActuatorsA Physical vol 249 pp 15ndash22 2016
[19] M Ling J Cao and N Pehrson ldquoKinetostatic and dynamicanalyses of planar compliant mechanisms via a two-portdynamic stiffness modelrdquo Precision Engineering vol 57pp 149ndash161 2019
[20] S T Smith D G Chetwynd and D K Bowen ldquoDesign andassessment of monolithic high precision translation mecha-nismsrdquo Journal of Physics E vol 20 no 8 pp 977ndash983 1987
[21] S Awtar and S Sen ldquoA generalized constraint model for two-dimensional beam flexures nonlinear load-displacementformulationrdquo Journal of Mechanical Design TransmissionASME vol 132 pp 0810081ndash08100811 2010
[22] Q Xu and Y Li ldquoAnalytical modeling optimization andtesting of a compound bridge-type compliant displacementamplifierrdquo Mechanism and Machine $eory vol 46 no 2pp 183ndash200 2011
[23] W-L Zhu Z Zhu P Guo and B-F Ju ldquoA novel hybridactuation mechanism based XY nanopositioning stage withtotally decoupled kinematicsrdquoMechanical Systems and SignalProcessing vol 99 pp 747ndash759 2018
[24] B Zhu X Zhang and N Wang ldquoTopology optimization ofhinge-free compliant mechanisms with multiple outputsusing level set methodrdquo Structural and MultidisciplinaryOptimization vol 47 no 5 pp 659ndash672 2013
[25] Q Chen X Zhang H Zhang B Zhu and B Chen ldquoTopologyoptimization of bistable mechanisms with maximized dif-ferences between switching forces in forward and backwarddirectionrdquo Mechanism and Machine $eory vol 139pp 131ndash143 2019
[26] N Wang Z Zhang X Zhang and C Cui ldquoOptimization of a2-DOF micro-positioning stage using corrugated flexureunitsrdquoMechanism andMachine$eory vol 121 pp 683ndash6962018
[27] M Liu X Zhang and S Fatikow ldquoDesign and analysis of ahigh-accuracy flexure hingerdquo Review of Scientific Instrumentsvol 87 2016
[28] T-P Dao and S-C Huang ldquoDesign and multi-objectiveoptimization for a broad self-amplified 2-DOF monolithicmechanismrdquo Sadhana vol 42 no 9 pp 1527ndash1542 2017
[29] K-B Choi and C S Han ldquoOptimal design of a compliantmechanism with circular notch flexure hingesrdquo Proceedings ofthe Institution of Mechanical Engineers Part C Journal ofMechanical Engineering Science vol 221 no 3 pp 385ndash3922007
[30] G G Fossati L F F Miguel and W J P Casas ldquoMulti-objective optimization of the suspension system parameters ofa full vehicle modelrdquo Optimization and Engineering vol 20no 1 pp 151ndash177 2019
[31] C Butler ldquoA primer on the Taguchi methodrdquo ComputerIntegrated Manufacturing Systems vol 5 no 3 p 246 1992
[32] N R Costa J Lourenccedilo and Z L Pereira ldquoDesirabilityfunction approach a review and performance evaluation inadverse conditionsrdquo Chemometrics and Intelligent LaboratorySystems vol 107 no 2 pp 234ndash244 2011
[33] S-C Huang and T-P Dao ldquoMulti-objective optimal designof a 2-DOF flexure-based mechanism using hybrid approachof grey-taguchi coupled response surface methodology andentropy measurementrdquo Arabian Journal for Science andEngineering vol 41 no 12 pp 5215ndash5231 2016
[34] T-P Dao ldquoMultiresponse optimization of a compliantguiding mechanism using hybrid taguchi-grey based fuzzylogic approachrdquo Mathematical Problems in Engineeringvol 2016 Article ID 5386893 17 pages 2016
[35] M V Arasu S Arokiyaraj P Viayaraghavan et al ldquoOne stepgreen synthesis of larvicidal and azo dye degrading
Mathematical Problems in Engineering 17
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering
antibacterial nanoparticles by response surface methodologyrdquoJournal of Photochemistry and Photobiology B Biologyvol 190 pp 154ndash162 2019
[36] K J Kim andD K J Lin ldquoOptimization ofmultiple responsesconsidering both location and dispersion effectsrdquo EuropeanJournal of Operational Research vol 169 no 1 pp 133ndash1452006
[37] P Jiang C Wang Q Zhou X Shao L Shu and X LildquoOptimization of laser welding process parameters of stainlesssteel 316L using FEM Kriging and NSGA-IIrdquo Advances inEngineering Software vol 99 pp 147ndash160 2016
[38] D Singh V Kumar Vaishali and M Kaur ldquoClassification ofCOVID-19 patients from chest CT images using multi-ob-jective differential evolutionndashbased convolutional neuralnetworksrdquo European Journal of Clinical Microbiology amp In-fectious Diseases vol 39 no 7 pp 1379ndash1389 2020
[39] R Rathi C Prakash S Singh G Krolczyk and C I PrunculdquoMeasurement and analysis of wind energy potential usingfuzzy based hybrid madm approachrdquo Energy Reports vol 6pp 228ndash237 2020
[40] H S Pannu D Singh and A K Malhi ldquoMulti-objectiveparticle swarm optimization-based adaptive neuro-fuzzy in-ference system for benzene monitoringrdquo Neural Computingand Applications vol 31 no 7 pp 2195ndash2205 2019
[41] M Keshtiara S Golabi and R Tarkesh Esfahani ldquoMulti-objective optimization of stainless steel 304 tube laser formingprocess using GArdquo Engineering Computations vol 37 2019
[42] S Chatterjee S Sarkar S Hore N Dey A S Ashour andV E Balas ldquoParticle swarm optimization trained neuralnetwork for structural failure prediction of multistoried RCbuildingsrdquo Neural Computing and Applications vol 28pp 2005ndash2016 2017
[43] T-P Dao S-C Huang and P T ang ldquoHybrid Taguchi-cuckoo search algorithm for optimization of a compliantfocus positioning platformrdquo Applied Soft Computing-Journalvol 57 2017
[44] R V Rao V J Savsani and D P Vakharia ldquoTeaching-learning-based optimization a novel method for constrainedmechanical design optimization problemsrdquo Computer-AidedDesign vol 43 no 3 pp 303ndash315 2011
[45] R V Rao H S Keesari P Oclon and J Taler ldquoAn adaptivemulti-team perturbation-guiding Jaya algorithm for optimi-zation and its applicationsrdquo Engineering Computationsvol 36 no 1 pp 391ndash419 2019
[46] A F Nematollahi A Rahiminejad and B Vahidi ldquoA novelphysical based meta-heuristic optimization method known asLightning Attachment Procedure Optimizationrdquo Applied SoftComputing vol 59 pp 596ndash621 2017
[47] S Mirjalili ldquoMoth-flame optimization algorithm a novelnature-inspired heuristic paradigmrdquo Knowledge-Based Sys-tem vol 89 pp 228ndash249 2015
[48] S Mirjalili ldquoe ant lion optimizerrdquo Advances in EngineeringSoftware vol 83 2015
[49] S Mirjalili and S Z M Hashim ldquoA new hybrid PSOGSAalgorithm for function optimizationrdquo in Proceedings ICCIA2010-2010 International Conference on Computer and Infor-mation Application Tianjin China July 2010
[50] S Mirjalili ldquoSCA A sine cosine algorithm for solving opti-mization problemsrdquo Knowledge-Based System vol 96 2016
[51] M A Dıaz-Cortes E Cuevas J Galvez and O Camarena ldquoAnew metaheuristic optimization methodology based on fuzzylogicrdquo Applied Soft Computing vol 61 pp 549ndash569 2017
[52] N Le Chau N T Tran and T P Dao ldquoA multi-responseoptimal design of bistable compliant mechanism using
efficient approach of desirability fuzzy logic ANFIS andLAPO algorithmrdquo Applied Soft Computing-Journal vol 942020
[53] J Zhou C Li C A Arslan M Hasanipanah andH Bakhshandeh Amnieh ldquoPerformance evaluation of hybridFFA-ANFIS and GA-ANFIS models to predict particle sizedistribution of a muck-pile after blastingrdquo EngineeringComputations vol 37 2019
[54] Q Liu X Zhou P Xu Q Zou and C Lin ldquoA flexure-Basedlong-Stroke fast tool servo for diamond turningrdquo $e In-ternational Journal of Advanced Manufacturing Technologyvol 59 2012
[55] Z Zhu X Zhou Q Liu and S Zhao ldquoMulti-objective op-timum design of fast tool servo based on improved differentialevolution algorithmrdquo Journal of Mechanical Science andTechnology 2011
[56] W Le Zhu X Yang F Duan Z Zhu and B F Ju ldquoDesignand adaptive terminal sliding mode control of a fast tool servosystem for diamondmachining of freeform surfacesrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Electronics 2019
[57] S Garcıa D Molina M Lozano and F Herrera ldquoA study onthe use of non-parametric tests for analyzing the evolutionaryalgorithmsrsquo behaviour a case study on the CECrsquo2005 SpecialSession on Real Parameter Optimizationrdquo Journal of Heu-ristics vol 15 no 6 pp 617ndash644 2009
18 Mathematical Problems in Engineering




























