-
Research ArticleTravelling Wave Solutions of Nonlinear Dynamical
Equations ina Double-Chain Model of DNA
Zheng-yong Ouyang1 and Shan Zheng2
1 Department of Mathematics, Foshan University, Foshan Guangdong
528000, China2Guangzhou Maritime College, Guangzhou Guangdong
510725, China
Correspondence should be addressed to Zheng-yong Ouyang;
zyouyang [email protected]
Received 6 January 2014; Revised 24 February 2014; Accepted 10
March 2014; Published 3 April 2014
Academic Editor: Yonghui Xia
Copyright © 2014 Z.-y. Ouyang and S. Zheng. This is an open
access article distributed under the Creative Commons
AttributionLicense, which permits unrestricted use, distribution,
and reproduction in any medium, provided the original work is
properlycited.
We consider the nonlinear dynamics in a double-chain model of
DNA which consists of two long elastic homogeneous
strandsconnectedwith each other by an elasticmembrane. By using
themethodof dynamical systems, the bounded travelingwave
solutionssuch as bell-shaped solitary waves and periodic waves for
the coupled nonlinear dynamical equations of DNA model are
obtainedand simulated numerically. For the same wave speed,
bell-shaped solitary waves of different heights are found to
coexist.
1. Introduction
In 1953, Waston and Crick discovered the structure
ofdeoxyribonucleic acid (DNA) double helix [1], which openedthe
area of molecular biology. The significance of the doublehelix
model not only means the proven structure of DNA,but, more
importantly, also helps to reveal the replicationmechanism of DNA.
To further study the characteristicsof DNA, nonlinear science has
been used to deal withDNA system, because its properties can be
investigated bynonlinear models that combine the methods of physics
withbiological tools [2]. The soliton theory especially
whichpertains to nonlinear science has been widely applied in
thestudy of DNA [3–6].
To study DNA structure from the view of nonlinearscience, it is
necessary to look for the right nonlinearmathematical models. A
number of researchers have tried toestablish mathematical models to
describe DNA system. Atthe beginning, it is difficult to use a
specific mathematicalmodel to simulate DNA system due to its
complex structureand the presence of various movements [7]. So some
simpli-fiedmodels were used to study only some internal movementin
DNA [8–12]. Further, two movements which made themain contribution
to the DNA denaturation process weretaken into account together in
one model. For example, atwo-dimensional discrete model was used to
describe the
two movements in DNA [13]. Another new double-chainmodel of DNA
that consists of two long elastic homogeneousstrands was given to
describe transverse movements alongthe hydrogen bond and
longitudinal movements along thebackbone direction [14, 15].
In [14, 15], the nonlinear dynamical equations werederived and
nonlinear dynamics of DNA were studied. Theexact solutions of the
general nonlinear dynamic systemin the double-chain model of DNA
were obtained anddiscussed numerically and analytically under some
specialapproximate conditions. The nonlinear dynamical equationsfor
the double-chain model were given as follows:
𝑢𝑡𝑡− 𝑐2
1𝑢𝑥𝑥
= 𝜆1𝑢 + 𝛾1𝑢V + 𝜇
1𝑢3+ 𝛽1𝑢V3,
V𝑡𝑡− 𝑐2
2V𝑥𝑥
= 𝜆2V + 𝛾2𝑢2+ 𝜇2𝑢2V + 𝛽
2V3 + 𝑐0,
(1)
where 𝑢 denotes the difference of the longitudinal
displace-ments of the bottom and top strands, that is, the
displace-ments of the bases from their equilibrium positions
alongthe direction of the phosphodiester bridge that connects
thetwo bases of the same strands; V represents the difference ofthe
transverse displacements of the bottom and top strands,that is, the
displacements of the bases from their equilibriumpositions along
the direction of the hydrogen bond that
Hindawi Publishing CorporationAbstract and Applied
AnalysisVolume 2014, Article ID 317543, 5
pageshttp://dx.doi.org/10.1155/2014/317543
-
2 Abstract and Applied Analysis
connects the two bases of the base pair. The constants 𝑐1,
𝑐2,
𝜆1, 𝜆2, 𝛾1, 𝛾2, 𝜇1, 𝜇2, 𝛽1, 𝛽2, and 𝑐
0in (1) are written as
𝑐1= ±√
𝑌
𝜌
, 𝑐2= ±√
𝐹
𝜌
, 𝜆1=
−2𝜇
𝜌𝜎ℎ
(ℎ − 𝑙0) ,
𝜆2=
−2𝜇
𝜌𝜎
, 𝛾1= 2𝛾2=
2√2𝜇𝑙0
𝜌𝜎ℎ2
, 𝜇1= 𝜇2=
−2𝜇𝑙0
𝜌𝜎ℎ3,
𝛽1= 𝛽2=
4𝜇𝑙0
𝜌𝜎ℎ3, 𝑐
0=
√2𝜇 (ℎ − 𝑙0)
𝜌𝜎ℎ
,
(2)
where 𝜌,𝜎,𝑌,𝐹, 𝜇, 𝑙0, and ℎ are, respectively, themass
density,
the area of transverse cross-section, the Young modulus,the
tension density of the strand, the rigidity of the elasticmembrane,
the distance of the two strands, and the height ofthe membrane in
the equilibrium position.
In [16], introducing the transformation V = 𝑎𝑢 + 𝑏 (𝑎 and𝑏 are
constants) in (1) yields
𝑢𝑡𝑡− 𝑐2
1𝑢𝑥𝑥
= 𝑢3(𝜇1+ 𝛽1𝑎2) + 𝑢2(2𝛽1𝑎𝑏 + 𝑎𝛾
1)
+ 𝑢 (𝜆1+ 𝑏𝛾1+ 𝛽1𝑏2) ,
𝑢𝑡𝑡− 𝑐2
2𝑢𝑥𝑥
= 𝑢3(𝜇2+ 𝛽2𝑎2) + 𝑢2(
𝛾2
𝑎
+
𝜇2𝑏
𝑎
+ 3𝛽2𝑎𝑏)
+ 𝑢 (𝜆2+ 3𝛽2𝑏2) +
𝜆2𝑏
𝑎
+
𝛽2𝑏3
𝑎
+
𝑐0
𝑎
.
(3)
Comparing (3) and using the physical quantities (2), it
followsthat 𝑏 = ℎ/√2 and 𝐹 = 𝑌; (3) can be written as
𝑢𝑡𝑡− 𝑐2
1𝑢𝑥𝑥
= 𝐴𝑢3+ 𝐵𝑢2+ 𝐶𝑢 + 𝐷, (4)
where 𝐴 = ((−2𝛼/ℎ3) + (4𝑎2𝛼/ℎ3)), 𝐵 = 6√2𝑎𝛼/ℎ2, 𝐶 =((−2𝛼/𝑙
0) + (6𝛼/ℎ)), and𝐷 = 0 with 𝛼 = 𝜇𝑙
0/𝜌𝜎.
Reference [16] studied the traveling wave solutions of(4) and
obtained one particular family of solitary kink-type solutions for
different values of Riccati parameter of(4). Unfortunately the
results are not complete, because (4)admits tanh-type,
periodic-type, and bell-type solutions; [16]only presented the
tanh-type solutions.
In this paper, we use the bifurcationmethod of dynamicalsystems
[17–20] to study bell-type and periodic-type solu-tions of (6),
which can improve the results in [16]. We lookfor solutions of (4)
in the form of 𝑢(𝑥, 𝑡) = 𝜑(𝜉) with 𝜉 =(𝑥/𝑐1) − √2𝑡. Substituting
𝑢(𝑥, 𝑡) = 𝜑((𝑥/𝑐
1) − √2𝑡) into (4),
we have
𝜑𝜉𝜉
= 𝐴𝜑3+ 𝐵𝜑2+ 𝐶𝜑, (5)
which is equivalent to the following two-dimensional
system:𝑑𝜑
𝑑𝜉
= 𝑦,
𝑑𝑦
𝑑𝜉
= 𝐴𝜑3+ 𝐵𝜑2+ 𝐶𝜑. (6)
Obviously, system (6) has the first integral
𝐻(𝜑, 𝑦) =
1
4
𝐴𝜑4+
1
3
𝐵𝜑3+
1
2
𝐶𝜑2−
1
2
𝑦2= 𝑀, (7)
where𝑀 is the Hamiltonian constant.
In fact, system (6) is a planar dynamical system whosephase
orbits defined by the vector field of (6) determinetraveling wave
solutions, so we first need to investigate somedifferent phase
portraits of system (6) in different parameterregions. Then, by
using the theory of dynamical system, wewill identify some
different wave profiles and compute exactrepresentations for
solitary wave solutions and periodic wavesolutions.
This paper is organized as follows. In Section 2, we
drawbifurcation phase portraits of system (6), where
explicitparametric conditions will be derived. In Section 3, we
giveexact representations of solitary wave and periodic
wavesolutions of (6) in explicit form. A short conclusion will
begiven in Section 4.
2. Properties of Singular Points andBifurcation Phase
Portraits
Firstly, we compute the equilibrium points of system (6)under
different parametric conditions. It is clear that neitherthe
parameters 𝐵 nor 𝐶 takes value zero from the forms ofparameters 𝐴,
𝐵, and 𝐶; then 𝐴 equals zero if 𝑎 = ±√2/2.So we give equilibrium
points in different parametric cases asfollows.
(1) When 𝐴 = 0, there are two equilibrium points (0, 0)and
(−𝐶/𝐵, 0).
(2) When 𝐴 ̸= 0 and 𝛿1> 0, there are three equilibrium
points (0, 0), (𝜑−, 0), and (𝜑
+, 0) of (6) on the 𝜑-axis,
where 𝛿1
= 𝐵2− 4𝐴𝐶, 𝜑
−= (−𝐵 − √𝛿
1)/2𝐴, and
𝜑+= (−𝐵 + √𝛿
1)/2𝐴.
Define 𝑓0(𝜑) = 𝐴𝜑
3+ 𝐵𝜑2+ 𝐶𝜑; then the type of
equilibrium point (𝜑, 0) can be decided by 𝜆±
= √𝑓
0(𝜑),
which are eigenvalues of linearized system of (6) at point(𝜑,
0).
Secondly, we compute the intersection points of phaseportraits
of (6) on the 𝜑-axis when the orbits pass throughthe equilibrium
point (0, 0), namely, when the Hamiltonianconstant𝑀 = ℎ(0, 0) = 0.
Let 𝑓(𝜑) = (1/2)𝐴𝜑4 + (2/3)𝐵𝜑3 +𝐶𝜑2, 𝛿2= (4/9)𝐵
2− 2𝐴𝐶, 𝜑
0= −3𝐴/2𝐵, 𝜑
1= ((−2/3)𝐵 −
√𝛿2)/𝐴, and 𝜑
2= ((−2/3)𝐵+√𝛿
2)/𝐴. When𝐴 = 0, there are
a double zero point 0 and a zero point 𝜑0of 𝑓(𝜑) on the 𝜑-
axis. When 𝐴 ̸= 0 and 𝛿2> 0, there are a double zero point
0
and two zero points 𝜑1and 𝜑
2of 𝑓(𝜑) on the 𝜑-axis. In order
to draw bifurcation phase portraits of system (6), we need
todiscuss the sign of parameters 𝐴, 𝐵, and 𝐶. The
intersectionpoints of phase portraits of (6) on the 𝜑-axis are
given asfollows.
(1) If 𝐴 = 0, there are two intersection points (0, 0) and(𝜑0,
0) of (6) on the 𝜑-axis (see Figure 1).
(2) If 𝐴 > 0, there are three intersection points (0, 0),(𝜑1,
0), and (𝜑
2, 0) of (6) on the 𝜑-axis and 𝜑
1< 𝜑2
(see Figure 2).(3) If 𝐴 < 0, there are three intersection
points (0, 0),
(𝜑1, 0), and (𝜑
2, 0) of (6) on the 𝜑-axis and 𝜑
2< 𝜑1
(see Figure 3).
-
Abstract and Applied Analysis 3
y
0 𝜑𝜑0
(a) 𝐵 > 0, 𝐶 > 0
y
0 𝜑𝜑0
(b) 𝐵 > 0, 𝐶 < 0
y
0 𝜑𝜑0
(c) 𝐵 < 0, 𝐶 > 0
y
0 𝜑𝜑0
(d) 𝐵 < 0, 𝐶 < 0
Figure 1: The bifurcation phase portraits of system (6) with 𝐴 =
0.
y
0 𝜑𝜑1 𝜑2
(a) 𝐵 > 0, 𝐶 > 0
y
0 𝜑𝜑1 𝜑2
(b) 𝐵 > 0, 𝐶 < 0
y
0 𝜑𝜑1 𝜑2
(c) 𝐵 < 0, 𝐶 > 0
y
0 𝜑𝜑1 𝜑2
(d) 𝐵 < 0, 𝐶 < 0
Figure 2: The bifurcation phase portraits of system (6) with 𝐴
> 0.
y
0 𝜑𝜑1𝜑2
(a) 𝐵 > 0, 𝐶 > 0
y
0 𝜑𝜑1𝜑2
(b) 𝐵 > 0, 𝐶 < 0
y
0 𝜑𝜑1𝜑2
(c) 𝐵 < 0, 𝐶 > 0
y
0 𝜑𝜑1𝜑2
(d) 𝐵 < 0, 𝐶 < 0
Figure 3: The bifurcation phase portraits of system (6) with 𝐴
< 0.
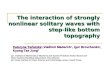
Finally, from the above analysis about system (6), we givetwelve
different phase portraits of (6) which are shown inFigures
1–3.There exist homoclinic orbits and periodic orbitsin some phase
portraits of Figures 1–3, which correspond tobell-type and
periodic-type waves and are of special interestto us.
3. Exact Explicit Representations ofSolitary Wave Solutions
(1) The case 𝐴 = 0, 𝐵 > 0, and 𝐶 > 0 (see Figure
1(a)).
Corresponding to the homoclinic orbit of (6) passingthrough
points (𝜑
0, 0) and (0, 0) on the𝜑−𝑦 plane, there exists
a smooth solitary wave solution. Now, (7) becomes
𝑦2=
2
3
𝐵𝜑3+ 𝐶𝜑2
(𝜑0⩽ 𝜑 ⩽ 0) . (8)
Choosing 𝜑(0) = 𝜑0, substituting (8) into the first equation
of
(6), and integrating along the homoclinic orbit, we have
∫
𝜑0
𝜑
1
𝑠√(2/3) 𝐵𝑠 + 𝐶
𝑑𝑠 =𝜉. (9)
Solving (9) yields
𝑢1= −
3𝐶
𝐵 (cosh (√𝐶 𝜉) + 1)
. (10)
(2) The case 𝐴 = 0, 𝐵 < 0, and 𝐶 > 0 (see Figure
1(c)).
Similarly, in Figure 1(c) the homoclinic orbit has thefollowing
expression:
𝑦2=
2
3
𝐵𝜑3+ 𝐶𝜑2
(0 ⩽ 𝜑 ⩽ 𝜑0) . (11)
Thus the corresponding smooth solitary wave solution isobtained
as (10) and its profile is shown in Figure 4(b).
(3) The case 𝐴 > 0, 𝐵 > 0, and 𝐶 > 0 (see Figure
2(a)).
In this case, on the 𝜑 − 𝑦 plane the homoclinic orbit of(6)
passing through points (𝜑
2, 0) and (0, 0) has the following
expression:
𝑦2=
1
2
𝐴𝜑4+
2
3
𝐵𝜑3+ 𝐶𝜑2
(𝜑2⩽ 𝜑 ⩽ 0) . (12)
-
4 Abstract and Applied Analysis
0
𝜑
𝜉
(a)
0
𝜑
𝜉
(b)
u2
u3
0
𝜑
𝜉
(c)
u2
u3
0
𝜑
𝜉
(d)
0
𝜑
𝜉
(e)
0
𝜑
𝜉
(f)
Figure 4: Smooth solitary wave and periodic wave solutions.
Choosing 𝜑(0) = 𝜑2, substituting (12) into the first
equation
of (6), and integrating along the homoclinic orbit, we have
∫
𝜑2
𝜑
1
𝑠√(1/2) 𝐴𝑠2+ (2/3) 𝐵𝑠 + 𝐶
𝑑𝑠 =𝜉. (13)
Solving (13), it follows that
𝑢2=
4𝐶𝛼1
𝛼2
1𝑒−√𝐶|𝜉|
+ ((4/9) 𝐵2− 2𝐴𝐶) 𝑒
√𝐶|𝜉|− (4/3) 𝐵𝛼
1
, (14)
where 𝛼1
= (2(−2𝐵2+ 9𝐴𝐶 + 𝐵√4𝐵
2− 18𝐴𝐶))/(−6𝐵 +
3√4𝐵2− 18𝐴𝐶).The profiles of solutions 𝑢
1and 𝑢2both have
figure caption Figure 4(a).
(4) The case 𝐴 > 0, 𝐵 < 0, and 𝐶 > 0 (see Figure
2(c)).
In this case, on the 𝜑 − 𝑦 plane the homoclinic orbit of(6)
passing through points (𝜑
1, 0) and (0, 0) has the following
expression:
𝑦2=
1
2
𝐴𝜑4+
2
3
𝐵𝜑3+ 𝐶𝜑2
(0 ⩽ 𝜑 ⩽ 𝜑1) . (15)
Choosing 𝜑(0) = 𝜑1, substituting (15) into the first
equation
of (6), and integrating along the homoclinic orbit, we have
∫
𝜑1
𝜑
1
𝑠√(1/2) 𝐴𝑠2+ (2/3) 𝐵𝑠 + 𝐶
𝑑𝑠 =𝜉. (16)
Solving (16), we get
𝑢3=
4𝐶𝛼2
𝛼2
2𝑒√𝐶|𝜉|
+ ((4/9) 𝐵2− 2𝐴𝐶) 𝑒
−√𝐶|𝜉|− (4/3) 𝐵𝛼
2
, (17)
where 𝛼2
= (2(2𝐵2
− 9𝐴𝐶 + 𝐵√4𝐵2− 18𝐴𝐶))/(6𝐵 +
3√4𝐵2− 18𝐴𝐶). The profile of 𝑢
3is shown in Figure 4(d).
(5) The case 𝐴 < 0, 𝐵 > 0, and 𝐶 > 0 and 𝐴 < 0, 𝐵
< 0,and 𝐶 > 0 (see Figures 3(a) and 3(c)).
In this case, there exist two homoclinic orbits and
theirexpressions are (12) and (15), respectively. Similarly we
getthe corresponding solitary wave solutions as 𝑢
2and 𝑢3, which
coexist for the same speed.The plane graphs of the
coexistingsolitary wave solutions are shown in Figure 4(c), when𝐴
< 0,𝐵 > 0, and 𝐶 > 0, and Figure 4(d), when 𝐴 < 0, 𝐵
< 0, and𝐶 > 0.
(6) The case 𝐴 < 0, 𝐵 > 0, and 𝐶 < 0 (see Figure
3(b)).
In this case, on the𝜑−𝑦plane the orbit of (6)which passesthrough
points (𝜑
1, 0) and (𝜑
2, 0) is a periodic orbit; it has the
following expression:
𝑦2=
1
2
𝐴𝜑4+
2
3
𝐵𝜑3+ 𝐶𝜑2, (0 < 𝜑
2⩽ 𝜑 ⩽ 𝜑
1) . (18)
Choosing 𝜑(0) = 𝜑1, substituting (18) into the first
equation
of (6), and integrating along the periodic orbit, we have
∫
𝜑1
𝜑
1
𝑠√(1/2) 𝐴𝑠2+ (2/3) 𝐵𝑠 + 𝐶
𝑑𝑠 =𝜉. (19)
Solving (19) we obtain the following periodic wave solution:
𝑢4=
6𝐶
√4𝐵2− 18𝐴𝐶 cos (√−𝐶𝜉) − 2𝐵
. (20)
The profile of 𝑢4is shown in Figure 4(e).
-
Abstract and Applied Analysis 5
(7) The case 𝐴 < 0, 𝐵 < 0, and 𝐶 < 0 (see Figure
3(d)).
Similarly, corresponding to the periodic orbit of (6)which
passes through points (𝜑
1, 0) and (𝜑
2, 0), there exists
a periodic wave solution. Now, the expression of the
periodicorbit is
𝑦2=
1
2
𝐴𝜑4+
2
3
𝐵𝜑3+ 𝐶𝜑2, (𝜑
2⩽ 𝜑 ⩽ 𝜑
1< 0) . (21)
Choosing 𝜑(0) = 𝜑2, substituting (21) into the first
equation
of (6), and integrating along the periodic orbit, we have
∫
𝜑
𝜑2
1
𝑠√(1/2) 𝐴𝑠2+ (2/3) 𝐵𝑠 + 𝐶
𝑑𝑠 =𝜉. (22)
Solving (22), it follows that
𝑢5=
6𝐶
−√4𝐵2− 18𝐴𝐶 cos (√−𝐶𝜉) − 2𝐵
. (23)
The profile of 𝑢5is shown in Figure 4(f).
4. Conclusion
In this paper, we employ the method of dynamical systemsto study
the nonlinear dynamical equations of DNA model.The bifurcation
phase portraits of the DNA under some para-metric conditions are
drawn, and explicit exact expressions ofbell-shaped solitary waves
and periodic waves are obtainedvia some special homoclinic and
periodic orbits; their planargraphs are simulated. These solutions
are new and differentfrom those in [14–16]; some existing results
are improved.Furthermore, in general, the larger the wave speed,
the higherthe wave crest. So for the same wave speed, it is
interestingthat the bell-shaped solitary waves of different heights
arefound to coexist.
Conflict of Interests
The authors declare that there is no conflict of
interestsregarding the publication of this paper.
Acknowledgments
This work was supported by the National Natural Sci-ence
Foundation of China (no. 11226303) and GuangdongProvince (no.
2013KJCX0189). The authors thank the editorsfor their hard working
and also gratefully acknowledgehelpful comments and suggestions by
reviewers.
References
[1] J. D. Watson and F. H. C. Crick, “Molecular structure of
nucleicacids: a structure for deoxyribose nucleic acid,” Nature,
vol. 171,no. 4356, pp. 737–738, 1953.
[2] M. Peyrard, S. C. López, and G. James, “Modelling DNA at
themesoscale: a challenge for nonlinear science?”Nonlinearity,
vol.21, p. T91, 2008.
[3] T. Lipniacki, “Chemically driven traveling waves in
DNA,”Physical Review E, vol. 60, p. 7253, 1999.
[4] S. Yomosa, “Solitary excitations in deoxyribonuclei acid
(DNA)double helices,” Physical Review A, vol. 30, no. 1, pp.
474–480,1984.
[5] C. T. Zhang, “Soliton excitations in deoxyribonucleic
acid(DNA)double helices,”Physical ReviewA, vol. 35, no. 2, pp.
886–891, 1987.
[6] K. Forinash, “Nonlinear dynamics in a double-chain model
ofDNA,” Physical Review B, vol. 43, p. 10734, 1991.
[7] L. V. Yakushevich, Nonlinear Physics of DNA, John Wiley
&Sons, Berlin, Germany, 2004.
[8] S. W. Englander, N. R. Kallenbanch, A. J. Heeger, J.
A.Krumhansl, and S. Litwin, “Nature of the open state in
longpolynucleotide double helices: possibility of soliton
excitations,”Proceedings of the National Academy of Sciences of the
UnitedStates of America, vol. 77, pp. 7222–7226, 1980.
[9] S. Yomosa, “Soliton excitations in deoxyribonucleic acid
(DNA)double helices,” Physical Review A, vol. 27, no. 4, pp.
2120–2125,1983.
[10] S. Takeno and S. Homma, “A coupled base-rotator model
forstructure and dynamics of DNA—local fluctuations in helicaltwist
angles and topological solitons,” Progress of TheoreticalPhysics,
vol. 72, no. 4, pp. 679–693, 1984.
[11] M. Peyrard and A. R. Bishop, “Statistical mechanics of a
nonlin-ear model for DNA denaturation,” Physical Review Letters,
vol.62, no. 23, pp. 2755–2758, 1989.
[12] T. Dauxois, M. Peyrard, and A. R. Bishop,
“Entropy-drivenDNA denaturation,” Physical Review E, vol. 47, no.
1, pp. R44–R47, 1993.
[13] V. Muto, P. S. Lomdahl, and P. L. Christiansen,
“Two-dimensional discrete model for DNA dynamics: longitudinalwave
propagation and denaturation,” Physical Review A, vol. 42,no. 12,
pp. 7452–7458, 1990.
[14] D.X.Kong, S. Y. Lou, and J. Zeng, “Nonlinear dynamics in a
newdouble Chain-model of DNA,” Communications in
TheoreticalPhysics, vol. 36, no. 6, pp. 737–742, 2001.
[15] X.-M. Qian and S.-Y. Lou, “Exact solutions of
nonlineardynamics equation in a new double-chain model of
DNA,”Communications in Theoretical Physics, vol. 39, no. 4, pp.
501–505, 2003.
[16] W. Alka, A. Goyal, and C. Nagaraja Kumar, “Nonlinear
dynam-ics of DNA—riccati generalized solitary wave solutions,”
PhysicsLetters A: General, Atomic and Solid State Physics, vol.
375, no.3, pp. 480–483, 2011.
[17] S. N. Chow and J. K. Hale, Methods of Bifurcation
Theory,Springer, Berlin, Germany, 1981.
[18] J. B. Li and Z. R. Liu, “Smooth and non-smooth traveling
wavesin a nonlinearly dispersive equation,” Applied
MathematicalModelling, vol. 25, pp. 41–56, 2000.
[19] J. B. Li and Z. R. Liu, “Traveling wave solutions for a
class ofnonlinear dispersive equations,”Chinese Annals
ofMathematics,vol. 23, p. 397, 2002.
[20] Z. R. Liu and Z. Y. Ouyang, “A note on solitary waves
formodified forms of Camassa-Holm and Degasperis-Procesiequations,”
Physics Letters A, vol. 366, no. 4-5, pp. 377–381, 2007.
-
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Probability and StatisticsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
CombinatoricsHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing
Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical
Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
The Scientific World JournalHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume
2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014
Stochastic AnalysisInternational Journal of