Embed Size (px)
Citation preview

Research ArticlePowertrain Matching and Optimization ofDual-Motor Hybrid Driving System for Electric VehicleBased on Quantum Genetic Intelligent Algorithm
Yong Wang12 and Dongye Sun1
1 The State Key Laboratory of Mechanical Transmission Chongqing University Chongqing 400044 China2Department of Automotive Engineering Chongqing College of Electronic Engineering Chongqing 401331 China
Correspondence should be addressed to Dongye Sun dysuncqueducn
Received 16 August 2014 Accepted 7 October 2014 Published 13 November 2014
Academic Editor Weiming Xiang
Copyright copy 2014 Y Wang and D SunThis is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In order to increase the driving range and improve the overall performance of all-electric vehicles a new dual-motor hybriddriving system with two power sources was proposedThis system achieved torque-speed coupling between the two power sourcesand greatly improved the high performance working range of the motors at the same time continuously variable transmission(CVT) was achieved to efficiently increase the driving range The power system parameters were determined using the ldquoglobaloptimization methodrdquo thus the vehiclersquos dynamics and economy were used as the optimization indexes Based on preliminarymatches quantum genetic algorithm was introduced to optimize the matching in the dual-motor hybrid power system Backwardsimulation was performed on the combined simulation platform of MatlabSimulink and AVL-Cruise to optimize simulate andverify the system parameters of the transmission system Results showed that quantum genetic algorithms exhibited good globaloptimization capability and convergence in dealing with multiobjective and multiparameter optimizationThe dual-motor hybrid-driving system for electric cars satisfied the dynamic performance and economy requirements of design efficiently increasing thedriving range of the car having high performance and reducing energy consumption of 156 compared with the conventionalelectric vehicle with single-speed reducers
1 Introduction
The global energy consumption continues to increase whilethe oil resources are depleted with time this is accompaniedby worsening air pollution causing governments and compa-nies worldwide to consider energy conservation as the mainconsideration in future development of vehicle technologies[1] The development of electric vehicles and related criticaltechnologies is one of the most efficient approaches to realizeenergy conservation and environmental protection [2 3]The new-energy vehicles include hybrid vehicles all-electricvehicles and fuel cell vehicles the development of suchvehicles is essential for realizing national energy safety andenvironmental protection as well as the healthy and sustain-able development of the automotive industry In all-electriccars batteries are used to store energy and electric motors areused for propulsion Unlike hybrid cars all-electric cars have
the advantages of zero emission reduced noise and simplestructuremdashthis promises a bright future for industries andhence has received much attention from governments andauto companies around the world [4ndash7] The power systemis an important component of an electric car and it mainlycomprises the motor propulsion system and mechanicaltransmission system It functions by converting electricalenergy from the energy storage device to mechanical energyfor propelling the car to overcome any driving resistancesand by converting the vehiclersquos kinetic energy to electricalenergy that is stored in the storage device during decelerationand brakingmdashsuch a braking action is termed regenerativebraking [8 9] An electric motor drive system is composedof an electric motor an inverter and an electric motorcontroller and it is one of the factors determining a carrsquosoverall performance The requirements for the motor drivesystem of electric vehicles are much more stringent than
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2014 Article ID 956521 11 pageshttpdxdoiorg1011552014956521
2 Discrete Dynamics in Nature and Society
those for the motor drive system used for conventionalindustrial purposes the drive system must have good speedand torque control capability a wide speed range relativelywide high performanceworking range high power-to-weightratio good environmental adaptability good reliability andso forth [7 10 11]
Currently the major motor drive systems for electric carsinclude the inductionmotor drive system permanentmagnetsynchronous motor drive system brushless DC motor drivesystem switched reluctance motor drive system and othersthat are designed by modifying the aforementioned systemsAmong these systems the permanent magnet synchronousmotor drive system shows the best overall performancethe advantages of this system include high power densitysmall size low weight and high performance It is the mostpopular motor drive system for electric cars [12ndash14] Thepower system of all-electric cars mainly comprises a singlemotor and a transmission device Such a structure yields lowperformance under low speed-low load low speed-high loadand high speed-low load conditions it also has a short drivingrange With the development in motor control technologyconsumersrsquo expectations regarding car performance haveincreased in particular from the perspectives of drivingcomfort and safety automatic transmission devices and largerdriving range will be the trend for all-electric cars [15ndash17] Improvement in the driving range depends on batterytechnologies as well as the powertrain and its controllingtechnologies Development of a high-performance transmis-sion system and fully functional impact energy managementcontrol strategies for improving driving range and overallperformance is the main research direction for electric cartechnologies [18ndash22]
This paper describes a new dual-motor hybrid drive sys-tem for electric cars this systemhas two power sources for thehybrid propulsion of the car under different circumstancesThis system greatly widens the high-performance workingrange of the synthetic powering sources and efficientlyincreases the driving range of electric cars Further thissystem has the electric continuously variable transmission(ECVT) function which allows the for continuously variabletransmission (CVT) of the power system under hybridpropulsion of the dual-motormdashthus the limitation imposedon the running range of a power source by stepped transmis-sion gearing is removed and the driving range is improved bybroadening the speed-ratio range of the transmission systemIn addition to guaranteeing driving safety the efficiency ofbrake energy recovery is improved which further increasesthe driving range of the all-electric cars At the same time theCVT also improves the driving performance of the vehicle
Since two independent electric motors are used as thepower sources in the dual-motor hybrid drive system thedual motor cars are very different from conventional electriccars in terms of driving modes Although the configurationof the transmission system remains the same the dual-motorcars have several transmission patterns the mainauxiliaryelectric transmission pattern in which two motors canwork in parallel or in series based on power demand thehybrid drive transmission pattern in which twomotors workin parallel and the speed-controlling electric transmission
pattern in which the dominant motor exclusively providesacceleration while the auxiliary motor adjusts the speedThus there is a big difference between the design of the powersystem of the dual-motor electric cars and that of the currentelectric cars In the present study parameters design wasconducted for the transmission system by using intelligentalgorithms in which the quantum genetic algorithm wasintroduced to match and optimize calculation to obtain theoptimal critical parameters for the power system
2 System Structure and Working Modes ofthe Hybrid Drive System
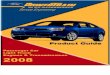
A schematic of the dual-motor hybrid drive system proposedin the current study is shown in Figure 1 This systemcomprises a single-stage planetary gear set two permanent-magnet synchronous motors two brakes and a clutch Thesun gear in the planetary gear is directly connected to theoutput shaft of motor B ring gear c can be directly connectedto the output shaft of motor A by rolling gear e or to thesun gear a through clutch C1 planet carrier d is connected tothe axle through the universal transmission device to exportpower the movable part of brake B1 is connected to the boxbody while its fixed part is connected to the output shaft ofmotor A and this part enables ring gear c to roll throughbrake B1 the movable part of brake B2 is connected to thebox body and the fixed part is connected to the output shaftof motor B and this part enables sun gear a to roll throughbrake B2
The determination of the workingmode is one of the coreissues in studying the power system The goal is to properlydistribute the desired torque among motors A and B basedon the current condition of the car (speed driving modepedal strength etc) in order to obtain good economy anddynamics Rolling and braking of the sun gear and ring gearslead to their connection and disconnection which enablesswitching between different working modes for the hybridpropulsion of the dual-motor car Based on theworking statusof motors A and B the brakes and the clutch eight workingmodes were determined in the current study as shown inTable 1
The dual-motor hybrid drive power system belongs to thecategory of multiple power sources motors A and B can beused as the sources for mechanical power for the propulsionof the car as electrical power sources and as generators duringbraking actions [23 24] When braking and parking the carthe motors are shut down both brakes are activated and theclutch is released in order to meet the requirements for thecar to park When the car has to be maintained in neutralposition the motors are shut down and the brakes and theclutch are all released When the car is going at a relativelyhigh speed motor A exclusively powers the car while brakeB2 is used for braking the sun gear is locked and the powerinput of motor A is achieved by rolling the gear and ringgear while its power output is achieved via the planet carrierThis helps achieve the desired power output after decelerationat low speed ratio and meet the low torque requirement ofthe car When the car is going at a relatively low speed
Discrete Dynamics in Nature and Society 3
Charger
Axle
Motor controller
Battery
B1
C1
B2
Motor A
Motor Ba
bd
c
e
Battery
Figure 1 Overall structure
Table 1 Work mode summary
Work mode Motor A Motor B B1 B2 C1 Vehicle stateParking braking Off Off Off Brake Off StopNeutral position Off Off Off Off Off Stop taxiingMotor A driving On Off Off Brake Off Low and medium loadMotor B driving Off On Brake Off Off Low and medium loadHybrid driving a On On Off Off Off Speed coupling CVTHybrid driving b On On Off Off On Torque coupling climbingRegenerative braking a On Off Off Brake Off Braking reduced speedRegenerative braking b Off On Brake Off Off Braking reduced speed
motor B exclusively powers the car while brake B1 is usedfor braking the rolling gear is locked and the ring gear istherefore locked power input and output of motor B areachieved by the sun gear and the planet carrier respectivelyto achieve power output after deceleration at large speedratio and meet the high torque requirement When the caris under median load the brakes and clutch are all releasedand the planetary gear set are unlocked motors A and Bachieve speed coupling and hybrid propulsion through theplanetary gear set and thus achieve continuously variabletransmission When the car is under a large load (eg duringclimbing and overloaded start) both brakes are released andthe clutch is attached and the planetary gear set is lockedto become a whole body for motors A and B to achievetorque coupling for the hybrid propulsion of the car Whenthe car is decelerating regenerative braking of motor A or Bis achieved by controlling the conditions of the two brakesWhen switching the working mode the motors regulate andcontrol the system through zero speed torque in order toachieve a relatively small resultant moment of the sun gearand ring gear The motors are sufficiently used to regulateand achieve flexible switching between the modes which canconveniently realize the release and attachment of the brakesand the clutch and reduce the impactwhen switching the gear
3 Parameter Matching for the Dual-MotorHybrid Drive System
Parameter matching for the power system is an importantstep in the design and development of all-electric carsThis step focuses mainly on the selection of the systemcomponents and parameter design for the power systemaccording to the design requirement of the vehicle Com-pared to the structures of hybrid cars and fuel cell carsstructures of all-electric cars are relatively simplemdashthe powersystem mainly comprises the electric motor battery andtransmission systemwhich are also considered for parametermatching [25]
4 Calculation of the Total Power Demand
The dual-motor hybrid drive system is the direct poweringsource for a vehicle and therefore its parameters weredetermined by considering the requirements for regulardriving as well as the dynamic performance [26 27] Theregular driving requirements are as follows
(a) must be able to drive on a ramp with 120572max as requiredat the minimum and stable speed
4 Discrete Dynamics in Nature and Society
(b) must be able to drive at a constant speed at themaximum 119906max
(c) must be able to achieve the time requirement of avehicle to accelerate from 0 to 100 kmh
The dynamic performance requirements are as follows
(a) The maximum power 119875120572max is determined based on
the maximum gradeability
119875120572max =
119906119894
3600120578119879
(119898119892119891 cos120572max + 119898119892 sin120572max +
1198621198631198601199062
119894
2115
)
(1)
where 119906119894is the lowest stabilized speed 119898 is vehicle
mass 119892 is gravitational acceleration 119891 is rolling resis-tance coefficient 119862
119863is coefficient of aerodynamic
drag119860 is frontal projected area and 120578119879is mechanical
efficiency(b) The maximum power is determined based on the
maximum speed 119906max
119875119906max =
119906max3600120578
119879
(119898119892119891 +
1198621198631198601199062
max2115
) (2)
(c) At the end time during acceleration the power outputof the motor is the highest and the maximum powerdemand during acceleration is as follows
119875119895max
=
1
3600120578119879
(
120575119898V2119898
36119889119905
[1 minus (
119905119898
minus 119889119905
119905119898
)
119909
]
+ 119898119892119891V119898
+
119862119863119860
2115
V3119898)
(3)
where 120575 is correction coefficient of rotating mass V119898
is the speed at the end time during acceleration 119905119898is
acceleration time and 119909 is the fitting coefficient
According to the maximum power of the three indicatorsof dynamic performance described above the total powerdemand 119875peak should meet all the abovementioned require-ments that is
119875peak ge max (119875119906max 119875120572max 119875119895max) (4)
5 Parameter Matching for Electric Motors
Since electric motors have satisfactory working propertiesincluding rated property over long working hours and peakproperty for short working hours the output rated powerof these motors can fulfill the power requirement for themaximum speed while the peak power achieved by theelectric motors in a short working time can fulfill the carrsquosrequirements for acceleration and climbing Selection ofthe electric motors for propulsion includes the parameter
selection of motors A and B The preliminary standards areas follows motor B should mainly fulfill the requirements forclimbing and acceleration and the sum of the rated power ofthe twomotors should fulfill the demand for total powerTheexternal characteristics of the electric motors are as followsbelow the rated speed they work in a constant torque modeabove the rated speed they work in a constant power modeThe relevant parameters for motor selection include ratedpower peak power rated speed and the maximum speedSince the system uses the planetary gear set the transmissionproperties of the planetary gears should be taken into accountwhen matching the motor parameters
119899119904+ 119896119899119903minus (1 + 119896) 119899
119888= 0
119879119904 119879119903 119879119888= 1 119896 minus (1 + 119896)
(5)
where 119899119904is the sun gear speed 119899
119903is the gear ring speed 119899
119888
is the planet carrier speed 119879119904is the sun gear torque 119879
119903is the
gear ring torque 119879119888is the planet carrier torque and 119896 is the
planetary gear parameters it is equal to the gear ratio betweenthe gear ring and the sun gear
6 Parameter Matching for Electric Motors
Based on the working mechanism and mode of the systemthe matched motor parameters as well as the transmissionproperties of the planetary gear the range of the planetarygear set parameter 119896 and themain deceleration ratio 119894
0can be
calculated In order to fulfill the requirement of themaximumgradeability and the maximum speed 119896 and 119894
0should satisfy
the following conditions
(1 + 119896) sdot 1198940le
0377119903119899A119906119894
(1 + 119896) sdot 1198940ge
(119891 cos120572max + sin120572max)119898119892119903
119879B max120578119879
119899c max le
119899B max + 119896119899A max1 + 119896
119899c max ge
119906max sdot 1198940
0377119903
(6)
where 119899A is the rated power of motor A 119879B max is the peaktorque of motor B 119899c max is the maximum speed of planetcarrier and 119899A max is the peak speed of motor A
7 Parameter Matching for the Battery Pack
In the current study a lithium-ion battery pack with goodproperties was usedThe rated voltage of a single lithium-ionbattery unit is 32 V in the market The battery pack has 100units providing a total voltage of 320V the capacity of thebattery pack must be able to fulfill the requirements of thedriving range of a car as calculated below
119862 =
1000119875119890sdot 119904
119880 sdot 120585SOC sdot V119890
(7)
Discrete Dynamics in Nature and Society 5
Table 2 Parameter of electric vehicle
Parameter ValueMass (kg) 1250Full mass (kg) 1550Coefficient of drag 033Radius (m) 0302Frontal area (m2) 246Maximum speed (kmh) ge130Acceleration time (s) le14 (0sim100 kmh)Maximum gradeability () ge30Maximum range per chargekm ge120
where 119875119890is the vehicle power at a constant speed 119904 is the
driving range of design requirements119880 is the battery voltage120585SOC is battery discharge capacity coefficient effectively whichis the product of battery average efficiency andmotor averageefficiency and V
119890is the constant speed
8 Results for Parameter Matching of theDual-Motor Hybrid Drive System
Table 2 lists the technical parameters determined accordingto the project requirement and Table 3 presents the prelimi-nary matching results of the system parameters according tothe abovementioned matching standards
9 Parameter Optimization for the Dual-MotorHybrid Drive System in All-Electric Cars
The performance of all-electric cars is largely dependent onthe performance levels as well as the reasonable design ofthe system components An important and feasible techni-cal approach to improve the performance involves properconfiguration and optimization of the critical parameters forthe current system components [28] Based on the operatingcharacteristics of all-electric cars as well as the particularityin evaluating their performance the current study took intoaccount the dynamic and economic performance of thecars and set the acceleration time and driving range as theobjective functions to develop the dual-objective function ofdynamics and economic performance this function aimed toimprove the driving range of all-electric cars while fulfillingthe carrsquos dynamics requirement [29 30]
10 Development of ObjectiveFunctions for Optimization
101 Dynamic Performance Objective Function The objectivefunction for dynamic performance was built by consideringthe acceleration time that is the time that a car takes toaccelerate from a speed of 0 to 100 kmhThe shorter the time
Table 3 Powertrain parameter of electric vehicle
Parameter ValueMotor
Motor type Permasyn motorMotor A rated powerkW 176Motor A peak powerkW 352Motor A rated speedrmin 2536Motor A maximum speedrmin 6078Motor A peak torqueNm 13254Motor B rated powerkW 143Motor B peak powerkW 305Motor B rated speedrmin 2498Motor B maximum speedrmin 5964Motor B peak torqueNm 11659
PowertrainPlanetary gear parameters 32Final ratio 25
BatteryType Lithium-ion battery voltageTotal voltageV 320Nominal capacityAh 60Cells 100Single section voltageV 25sim34
the better the dynamic performance The acceleration time 119905
can be expressed as follows
1198911(119883) = 119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V (8)
where 119865119894is vehicle traction 119865
119891is vehicle rolling resistance
and 119865119908is vehicle air reaction
102 Economy Objective Function The driving range of afully charged car was used as the evaluator for economyunder the NEDC cycle The energy consumption at constantspeed as well as under uniformly accelerated motion wascalculated independently and then summed up the electriccarrsquos driving range for the entire cycle was obtained based onthe summation
1198912(119883) = 119871 =
119882119887
sum119882
sdot 119878 (9)
where 119878 is the distance under the NEDC cycle 119882119887is the
battery actually stored energy and sum119882 is the total energyconsumption
11 Fundamentals of Quantum GeneticIntelligence Optimization Algorithms
A highly accurate calculation procedure is to be adopted formultiobjective optimization which is a time-consuming pro-cess Most scholars tend to apply similar techniques to set theobjectives and constrain the model to conduct optimization
6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
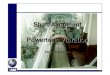
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
those for the motor drive system used for conventionalindustrial purposes the drive system must have good speedand torque control capability a wide speed range relativelywide high performanceworking range high power-to-weightratio good environmental adaptability good reliability andso forth [7 10 11]
Currently the major motor drive systems for electric carsinclude the inductionmotor drive system permanentmagnetsynchronous motor drive system brushless DC motor drivesystem switched reluctance motor drive system and othersthat are designed by modifying the aforementioned systemsAmong these systems the permanent magnet synchronousmotor drive system shows the best overall performancethe advantages of this system include high power densitysmall size low weight and high performance It is the mostpopular motor drive system for electric cars [12ndash14] Thepower system of all-electric cars mainly comprises a singlemotor and a transmission device Such a structure yields lowperformance under low speed-low load low speed-high loadand high speed-low load conditions it also has a short drivingrange With the development in motor control technologyconsumersrsquo expectations regarding car performance haveincreased in particular from the perspectives of drivingcomfort and safety automatic transmission devices and largerdriving range will be the trend for all-electric cars [15ndash17] Improvement in the driving range depends on batterytechnologies as well as the powertrain and its controllingtechnologies Development of a high-performance transmis-sion system and fully functional impact energy managementcontrol strategies for improving driving range and overallperformance is the main research direction for electric cartechnologies [18ndash22]
This paper describes a new dual-motor hybrid drive sys-tem for electric cars this systemhas two power sources for thehybrid propulsion of the car under different circumstancesThis system greatly widens the high-performance workingrange of the synthetic powering sources and efficientlyincreases the driving range of electric cars Further thissystem has the electric continuously variable transmission(ECVT) function which allows the for continuously variabletransmission (CVT) of the power system under hybridpropulsion of the dual-motormdashthus the limitation imposedon the running range of a power source by stepped transmis-sion gearing is removed and the driving range is improved bybroadening the speed-ratio range of the transmission systemIn addition to guaranteeing driving safety the efficiency ofbrake energy recovery is improved which further increasesthe driving range of the all-electric cars At the same time theCVT also improves the driving performance of the vehicle
Since two independent electric motors are used as thepower sources in the dual-motor hybrid drive system thedual motor cars are very different from conventional electriccars in terms of driving modes Although the configurationof the transmission system remains the same the dual-motorcars have several transmission patterns the mainauxiliaryelectric transmission pattern in which two motors canwork in parallel or in series based on power demand thehybrid drive transmission pattern in which twomotors workin parallel and the speed-controlling electric transmission
pattern in which the dominant motor exclusively providesacceleration while the auxiliary motor adjusts the speedThus there is a big difference between the design of the powersystem of the dual-motor electric cars and that of the currentelectric cars In the present study parameters design wasconducted for the transmission system by using intelligentalgorithms in which the quantum genetic algorithm wasintroduced to match and optimize calculation to obtain theoptimal critical parameters for the power system
2 System Structure and Working Modes ofthe Hybrid Drive System
A schematic of the dual-motor hybrid drive system proposedin the current study is shown in Figure 1 This systemcomprises a single-stage planetary gear set two permanent-magnet synchronous motors two brakes and a clutch Thesun gear in the planetary gear is directly connected to theoutput shaft of motor B ring gear c can be directly connectedto the output shaft of motor A by rolling gear e or to thesun gear a through clutch C1 planet carrier d is connected tothe axle through the universal transmission device to exportpower the movable part of brake B1 is connected to the boxbody while its fixed part is connected to the output shaft ofmotor A and this part enables ring gear c to roll throughbrake B1 the movable part of brake B2 is connected to thebox body and the fixed part is connected to the output shaftof motor B and this part enables sun gear a to roll throughbrake B2
The determination of the workingmode is one of the coreissues in studying the power system The goal is to properlydistribute the desired torque among motors A and B basedon the current condition of the car (speed driving modepedal strength etc) in order to obtain good economy anddynamics Rolling and braking of the sun gear and ring gearslead to their connection and disconnection which enablesswitching between different working modes for the hybridpropulsion of the dual-motor car Based on theworking statusof motors A and B the brakes and the clutch eight workingmodes were determined in the current study as shown inTable 1
The dual-motor hybrid drive power system belongs to thecategory of multiple power sources motors A and B can beused as the sources for mechanical power for the propulsionof the car as electrical power sources and as generators duringbraking actions [23 24] When braking and parking the carthe motors are shut down both brakes are activated and theclutch is released in order to meet the requirements for thecar to park When the car has to be maintained in neutralposition the motors are shut down and the brakes and theclutch are all released When the car is going at a relativelyhigh speed motor A exclusively powers the car while brakeB2 is used for braking the sun gear is locked and the powerinput of motor A is achieved by rolling the gear and ringgear while its power output is achieved via the planet carrierThis helps achieve the desired power output after decelerationat low speed ratio and meet the low torque requirement ofthe car When the car is going at a relatively low speed
Discrete Dynamics in Nature and Society 3
Charger
Axle
Motor controller
Battery
B1
C1
B2
Motor A
Motor Ba
bd
c
e
Battery
Figure 1 Overall structure
Table 1 Work mode summary
Work mode Motor A Motor B B1 B2 C1 Vehicle stateParking braking Off Off Off Brake Off StopNeutral position Off Off Off Off Off Stop taxiingMotor A driving On Off Off Brake Off Low and medium loadMotor B driving Off On Brake Off Off Low and medium loadHybrid driving a On On Off Off Off Speed coupling CVTHybrid driving b On On Off Off On Torque coupling climbingRegenerative braking a On Off Off Brake Off Braking reduced speedRegenerative braking b Off On Brake Off Off Braking reduced speed
motor B exclusively powers the car while brake B1 is usedfor braking the rolling gear is locked and the ring gear istherefore locked power input and output of motor B areachieved by the sun gear and the planet carrier respectivelyto achieve power output after deceleration at large speedratio and meet the high torque requirement When the caris under median load the brakes and clutch are all releasedand the planetary gear set are unlocked motors A and Bachieve speed coupling and hybrid propulsion through theplanetary gear set and thus achieve continuously variabletransmission When the car is under a large load (eg duringclimbing and overloaded start) both brakes are released andthe clutch is attached and the planetary gear set is lockedto become a whole body for motors A and B to achievetorque coupling for the hybrid propulsion of the car Whenthe car is decelerating regenerative braking of motor A or Bis achieved by controlling the conditions of the two brakesWhen switching the working mode the motors regulate andcontrol the system through zero speed torque in order toachieve a relatively small resultant moment of the sun gearand ring gear The motors are sufficiently used to regulateand achieve flexible switching between the modes which canconveniently realize the release and attachment of the brakesand the clutch and reduce the impactwhen switching the gear
3 Parameter Matching for the Dual-MotorHybrid Drive System
Parameter matching for the power system is an importantstep in the design and development of all-electric carsThis step focuses mainly on the selection of the systemcomponents and parameter design for the power systemaccording to the design requirement of the vehicle Com-pared to the structures of hybrid cars and fuel cell carsstructures of all-electric cars are relatively simplemdashthe powersystem mainly comprises the electric motor battery andtransmission systemwhich are also considered for parametermatching [25]
4 Calculation of the Total Power Demand
The dual-motor hybrid drive system is the direct poweringsource for a vehicle and therefore its parameters weredetermined by considering the requirements for regulardriving as well as the dynamic performance [26 27] Theregular driving requirements are as follows
(a) must be able to drive on a ramp with 120572max as requiredat the minimum and stable speed
4 Discrete Dynamics in Nature and Society
(b) must be able to drive at a constant speed at themaximum 119906max
(c) must be able to achieve the time requirement of avehicle to accelerate from 0 to 100 kmh
The dynamic performance requirements are as follows
(a) The maximum power 119875120572max is determined based on
the maximum gradeability
119875120572max =
119906119894
3600120578119879
(119898119892119891 cos120572max + 119898119892 sin120572max +
1198621198631198601199062
119894
2115
)
(1)
where 119906119894is the lowest stabilized speed 119898 is vehicle
mass 119892 is gravitational acceleration 119891 is rolling resis-tance coefficient 119862
119863is coefficient of aerodynamic
drag119860 is frontal projected area and 120578119879is mechanical
efficiency(b) The maximum power is determined based on the
maximum speed 119906max
119875119906max =
119906max3600120578
119879
(119898119892119891 +
1198621198631198601199062
max2115
) (2)
(c) At the end time during acceleration the power outputof the motor is the highest and the maximum powerdemand during acceleration is as follows
119875119895max
=
1
3600120578119879
(
120575119898V2119898
36119889119905
[1 minus (
119905119898
minus 119889119905
119905119898
)
119909
]
+ 119898119892119891V119898
+
119862119863119860
2115
V3119898)
(3)
where 120575 is correction coefficient of rotating mass V119898
is the speed at the end time during acceleration 119905119898is
acceleration time and 119909 is the fitting coefficient
According to the maximum power of the three indicatorsof dynamic performance described above the total powerdemand 119875peak should meet all the abovementioned require-ments that is
119875peak ge max (119875119906max 119875120572max 119875119895max) (4)
5 Parameter Matching for Electric Motors
Since electric motors have satisfactory working propertiesincluding rated property over long working hours and peakproperty for short working hours the output rated powerof these motors can fulfill the power requirement for themaximum speed while the peak power achieved by theelectric motors in a short working time can fulfill the carrsquosrequirements for acceleration and climbing Selection ofthe electric motors for propulsion includes the parameter
selection of motors A and B The preliminary standards areas follows motor B should mainly fulfill the requirements forclimbing and acceleration and the sum of the rated power ofthe twomotors should fulfill the demand for total powerTheexternal characteristics of the electric motors are as followsbelow the rated speed they work in a constant torque modeabove the rated speed they work in a constant power modeThe relevant parameters for motor selection include ratedpower peak power rated speed and the maximum speedSince the system uses the planetary gear set the transmissionproperties of the planetary gears should be taken into accountwhen matching the motor parameters
119899119904+ 119896119899119903minus (1 + 119896) 119899
119888= 0
119879119904 119879119903 119879119888= 1 119896 minus (1 + 119896)
(5)
where 119899119904is the sun gear speed 119899
119903is the gear ring speed 119899
119888
is the planet carrier speed 119879119904is the sun gear torque 119879
119903is the
gear ring torque 119879119888is the planet carrier torque and 119896 is the
planetary gear parameters it is equal to the gear ratio betweenthe gear ring and the sun gear
6 Parameter Matching for Electric Motors
Based on the working mechanism and mode of the systemthe matched motor parameters as well as the transmissionproperties of the planetary gear the range of the planetarygear set parameter 119896 and themain deceleration ratio 119894
0can be
calculated In order to fulfill the requirement of themaximumgradeability and the maximum speed 119896 and 119894
0should satisfy
the following conditions
(1 + 119896) sdot 1198940le
0377119903119899A119906119894
(1 + 119896) sdot 1198940ge
(119891 cos120572max + sin120572max)119898119892119903
119879B max120578119879
119899c max le
119899B max + 119896119899A max1 + 119896
119899c max ge
119906max sdot 1198940
0377119903
(6)
where 119899A is the rated power of motor A 119879B max is the peaktorque of motor B 119899c max is the maximum speed of planetcarrier and 119899A max is the peak speed of motor A
7 Parameter Matching for the Battery Pack
In the current study a lithium-ion battery pack with goodproperties was usedThe rated voltage of a single lithium-ionbattery unit is 32 V in the market The battery pack has 100units providing a total voltage of 320V the capacity of thebattery pack must be able to fulfill the requirements of thedriving range of a car as calculated below
119862 =
1000119875119890sdot 119904
119880 sdot 120585SOC sdot V119890
(7)
Discrete Dynamics in Nature and Society 5
Table 2 Parameter of electric vehicle
Parameter ValueMass (kg) 1250Full mass (kg) 1550Coefficient of drag 033Radius (m) 0302Frontal area (m2) 246Maximum speed (kmh) ge130Acceleration time (s) le14 (0sim100 kmh)Maximum gradeability () ge30Maximum range per chargekm ge120
where 119875119890is the vehicle power at a constant speed 119904 is the
driving range of design requirements119880 is the battery voltage120585SOC is battery discharge capacity coefficient effectively whichis the product of battery average efficiency andmotor averageefficiency and V
119890is the constant speed
8 Results for Parameter Matching of theDual-Motor Hybrid Drive System
Table 2 lists the technical parameters determined accordingto the project requirement and Table 3 presents the prelimi-nary matching results of the system parameters according tothe abovementioned matching standards
9 Parameter Optimization for the Dual-MotorHybrid Drive System in All-Electric Cars
The performance of all-electric cars is largely dependent onthe performance levels as well as the reasonable design ofthe system components An important and feasible techni-cal approach to improve the performance involves properconfiguration and optimization of the critical parameters forthe current system components [28] Based on the operatingcharacteristics of all-electric cars as well as the particularityin evaluating their performance the current study took intoaccount the dynamic and economic performance of thecars and set the acceleration time and driving range as theobjective functions to develop the dual-objective function ofdynamics and economic performance this function aimed toimprove the driving range of all-electric cars while fulfillingthe carrsquos dynamics requirement [29 30]
10 Development of ObjectiveFunctions for Optimization
101 Dynamic Performance Objective Function The objectivefunction for dynamic performance was built by consideringthe acceleration time that is the time that a car takes toaccelerate from a speed of 0 to 100 kmhThe shorter the time
Table 3 Powertrain parameter of electric vehicle
Parameter ValueMotor
Motor type Permasyn motorMotor A rated powerkW 176Motor A peak powerkW 352Motor A rated speedrmin 2536Motor A maximum speedrmin 6078Motor A peak torqueNm 13254Motor B rated powerkW 143Motor B peak powerkW 305Motor B rated speedrmin 2498Motor B maximum speedrmin 5964Motor B peak torqueNm 11659
PowertrainPlanetary gear parameters 32Final ratio 25
BatteryType Lithium-ion battery voltageTotal voltageV 320Nominal capacityAh 60Cells 100Single section voltageV 25sim34
the better the dynamic performance The acceleration time 119905
can be expressed as follows
1198911(119883) = 119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V (8)
where 119865119894is vehicle traction 119865
119891is vehicle rolling resistance
and 119865119908is vehicle air reaction
102 Economy Objective Function The driving range of afully charged car was used as the evaluator for economyunder the NEDC cycle The energy consumption at constantspeed as well as under uniformly accelerated motion wascalculated independently and then summed up the electriccarrsquos driving range for the entire cycle was obtained based onthe summation
1198912(119883) = 119871 =
119882119887
sum119882
sdot 119878 (9)
where 119878 is the distance under the NEDC cycle 119882119887is the
battery actually stored energy and sum119882 is the total energyconsumption
11 Fundamentals of Quantum GeneticIntelligence Optimization Algorithms
A highly accurate calculation procedure is to be adopted formultiobjective optimization which is a time-consuming pro-cess Most scholars tend to apply similar techniques to set theobjectives and constrain the model to conduct optimization
6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
Charger
Axle
Motor controller
Battery
B1
C1
B2
Motor A
Motor Ba
bd
c
e
Battery
Figure 1 Overall structure
Table 1 Work mode summary
Work mode Motor A Motor B B1 B2 C1 Vehicle stateParking braking Off Off Off Brake Off StopNeutral position Off Off Off Off Off Stop taxiingMotor A driving On Off Off Brake Off Low and medium loadMotor B driving Off On Brake Off Off Low and medium loadHybrid driving a On On Off Off Off Speed coupling CVTHybrid driving b On On Off Off On Torque coupling climbingRegenerative braking a On Off Off Brake Off Braking reduced speedRegenerative braking b Off On Brake Off Off Braking reduced speed
motor B exclusively powers the car while brake B1 is usedfor braking the rolling gear is locked and the ring gear istherefore locked power input and output of motor B areachieved by the sun gear and the planet carrier respectivelyto achieve power output after deceleration at large speedratio and meet the high torque requirement When the caris under median load the brakes and clutch are all releasedand the planetary gear set are unlocked motors A and Bachieve speed coupling and hybrid propulsion through theplanetary gear set and thus achieve continuously variabletransmission When the car is under a large load (eg duringclimbing and overloaded start) both brakes are released andthe clutch is attached and the planetary gear set is lockedto become a whole body for motors A and B to achievetorque coupling for the hybrid propulsion of the car Whenthe car is decelerating regenerative braking of motor A or Bis achieved by controlling the conditions of the two brakesWhen switching the working mode the motors regulate andcontrol the system through zero speed torque in order toachieve a relatively small resultant moment of the sun gearand ring gear The motors are sufficiently used to regulateand achieve flexible switching between the modes which canconveniently realize the release and attachment of the brakesand the clutch and reduce the impactwhen switching the gear
3 Parameter Matching for the Dual-MotorHybrid Drive System
Parameter matching for the power system is an importantstep in the design and development of all-electric carsThis step focuses mainly on the selection of the systemcomponents and parameter design for the power systemaccording to the design requirement of the vehicle Com-pared to the structures of hybrid cars and fuel cell carsstructures of all-electric cars are relatively simplemdashthe powersystem mainly comprises the electric motor battery andtransmission systemwhich are also considered for parametermatching [25]
4 Calculation of the Total Power Demand
The dual-motor hybrid drive system is the direct poweringsource for a vehicle and therefore its parameters weredetermined by considering the requirements for regulardriving as well as the dynamic performance [26 27] Theregular driving requirements are as follows
(a) must be able to drive on a ramp with 120572max as requiredat the minimum and stable speed
4 Discrete Dynamics in Nature and Society
(b) must be able to drive at a constant speed at themaximum 119906max
(c) must be able to achieve the time requirement of avehicle to accelerate from 0 to 100 kmh
The dynamic performance requirements are as follows
(a) The maximum power 119875120572max is determined based on
the maximum gradeability
119875120572max =
119906119894
3600120578119879
(119898119892119891 cos120572max + 119898119892 sin120572max +
1198621198631198601199062
119894
2115
)
(1)
where 119906119894is the lowest stabilized speed 119898 is vehicle
mass 119892 is gravitational acceleration 119891 is rolling resis-tance coefficient 119862
119863is coefficient of aerodynamic
drag119860 is frontal projected area and 120578119879is mechanical
efficiency(b) The maximum power is determined based on the
maximum speed 119906max
119875119906max =
119906max3600120578
119879
(119898119892119891 +
1198621198631198601199062
max2115
) (2)
(c) At the end time during acceleration the power outputof the motor is the highest and the maximum powerdemand during acceleration is as follows
119875119895max
=
1
3600120578119879
(
120575119898V2119898
36119889119905
[1 minus (
119905119898
minus 119889119905
119905119898
)
119909
]
+ 119898119892119891V119898
+
119862119863119860
2115
V3119898)
(3)
where 120575 is correction coefficient of rotating mass V119898
is the speed at the end time during acceleration 119905119898is
acceleration time and 119909 is the fitting coefficient
According to the maximum power of the three indicatorsof dynamic performance described above the total powerdemand 119875peak should meet all the abovementioned require-ments that is
119875peak ge max (119875119906max 119875120572max 119875119895max) (4)
5 Parameter Matching for Electric Motors
Since electric motors have satisfactory working propertiesincluding rated property over long working hours and peakproperty for short working hours the output rated powerof these motors can fulfill the power requirement for themaximum speed while the peak power achieved by theelectric motors in a short working time can fulfill the carrsquosrequirements for acceleration and climbing Selection ofthe electric motors for propulsion includes the parameter
selection of motors A and B The preliminary standards areas follows motor B should mainly fulfill the requirements forclimbing and acceleration and the sum of the rated power ofthe twomotors should fulfill the demand for total powerTheexternal characteristics of the electric motors are as followsbelow the rated speed they work in a constant torque modeabove the rated speed they work in a constant power modeThe relevant parameters for motor selection include ratedpower peak power rated speed and the maximum speedSince the system uses the planetary gear set the transmissionproperties of the planetary gears should be taken into accountwhen matching the motor parameters
119899119904+ 119896119899119903minus (1 + 119896) 119899
119888= 0
119879119904 119879119903 119879119888= 1 119896 minus (1 + 119896)
(5)
where 119899119904is the sun gear speed 119899
119903is the gear ring speed 119899
119888
is the planet carrier speed 119879119904is the sun gear torque 119879
119903is the
gear ring torque 119879119888is the planet carrier torque and 119896 is the
planetary gear parameters it is equal to the gear ratio betweenthe gear ring and the sun gear
6 Parameter Matching for Electric Motors
Based on the working mechanism and mode of the systemthe matched motor parameters as well as the transmissionproperties of the planetary gear the range of the planetarygear set parameter 119896 and themain deceleration ratio 119894
0can be
calculated In order to fulfill the requirement of themaximumgradeability and the maximum speed 119896 and 119894
0should satisfy
the following conditions
(1 + 119896) sdot 1198940le
0377119903119899A119906119894
(1 + 119896) sdot 1198940ge
(119891 cos120572max + sin120572max)119898119892119903
119879B max120578119879
119899c max le
119899B max + 119896119899A max1 + 119896
119899c max ge
119906max sdot 1198940
0377119903
(6)
where 119899A is the rated power of motor A 119879B max is the peaktorque of motor B 119899c max is the maximum speed of planetcarrier and 119899A max is the peak speed of motor A
7 Parameter Matching for the Battery Pack
In the current study a lithium-ion battery pack with goodproperties was usedThe rated voltage of a single lithium-ionbattery unit is 32 V in the market The battery pack has 100units providing a total voltage of 320V the capacity of thebattery pack must be able to fulfill the requirements of thedriving range of a car as calculated below
119862 =
1000119875119890sdot 119904
119880 sdot 120585SOC sdot V119890
(7)
Discrete Dynamics in Nature and Society 5
Table 2 Parameter of electric vehicle
Parameter ValueMass (kg) 1250Full mass (kg) 1550Coefficient of drag 033Radius (m) 0302Frontal area (m2) 246Maximum speed (kmh) ge130Acceleration time (s) le14 (0sim100 kmh)Maximum gradeability () ge30Maximum range per chargekm ge120
where 119875119890is the vehicle power at a constant speed 119904 is the
driving range of design requirements119880 is the battery voltage120585SOC is battery discharge capacity coefficient effectively whichis the product of battery average efficiency andmotor averageefficiency and V
119890is the constant speed
8 Results for Parameter Matching of theDual-Motor Hybrid Drive System
Table 2 lists the technical parameters determined accordingto the project requirement and Table 3 presents the prelimi-nary matching results of the system parameters according tothe abovementioned matching standards
9 Parameter Optimization for the Dual-MotorHybrid Drive System in All-Electric Cars
The performance of all-electric cars is largely dependent onthe performance levels as well as the reasonable design ofthe system components An important and feasible techni-cal approach to improve the performance involves properconfiguration and optimization of the critical parameters forthe current system components [28] Based on the operatingcharacteristics of all-electric cars as well as the particularityin evaluating their performance the current study took intoaccount the dynamic and economic performance of thecars and set the acceleration time and driving range as theobjective functions to develop the dual-objective function ofdynamics and economic performance this function aimed toimprove the driving range of all-electric cars while fulfillingthe carrsquos dynamics requirement [29 30]
10 Development of ObjectiveFunctions for Optimization
101 Dynamic Performance Objective Function The objectivefunction for dynamic performance was built by consideringthe acceleration time that is the time that a car takes toaccelerate from a speed of 0 to 100 kmhThe shorter the time
Table 3 Powertrain parameter of electric vehicle
Parameter ValueMotor
Motor type Permasyn motorMotor A rated powerkW 176Motor A peak powerkW 352Motor A rated speedrmin 2536Motor A maximum speedrmin 6078Motor A peak torqueNm 13254Motor B rated powerkW 143Motor B peak powerkW 305Motor B rated speedrmin 2498Motor B maximum speedrmin 5964Motor B peak torqueNm 11659
PowertrainPlanetary gear parameters 32Final ratio 25
BatteryType Lithium-ion battery voltageTotal voltageV 320Nominal capacityAh 60Cells 100Single section voltageV 25sim34
the better the dynamic performance The acceleration time 119905
can be expressed as follows
1198911(119883) = 119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V (8)
where 119865119894is vehicle traction 119865
119891is vehicle rolling resistance
and 119865119908is vehicle air reaction
102 Economy Objective Function The driving range of afully charged car was used as the evaluator for economyunder the NEDC cycle The energy consumption at constantspeed as well as under uniformly accelerated motion wascalculated independently and then summed up the electriccarrsquos driving range for the entire cycle was obtained based onthe summation
1198912(119883) = 119871 =
119882119887
sum119882
sdot 119878 (9)
where 119878 is the distance under the NEDC cycle 119882119887is the
battery actually stored energy and sum119882 is the total energyconsumption
11 Fundamentals of Quantum GeneticIntelligence Optimization Algorithms
A highly accurate calculation procedure is to be adopted formultiobjective optimization which is a time-consuming pro-cess Most scholars tend to apply similar techniques to set theobjectives and constrain the model to conduct optimization
6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
(b) must be able to drive at a constant speed at themaximum 119906max
(c) must be able to achieve the time requirement of avehicle to accelerate from 0 to 100 kmh
The dynamic performance requirements are as follows
(a) The maximum power 119875120572max is determined based on
the maximum gradeability
119875120572max =
119906119894
3600120578119879
(119898119892119891 cos120572max + 119898119892 sin120572max +
1198621198631198601199062
119894
2115
)
(1)
where 119906119894is the lowest stabilized speed 119898 is vehicle
mass 119892 is gravitational acceleration 119891 is rolling resis-tance coefficient 119862
119863is coefficient of aerodynamic
drag119860 is frontal projected area and 120578119879is mechanical
efficiency(b) The maximum power is determined based on the
maximum speed 119906max
119875119906max =
119906max3600120578
119879
(119898119892119891 +
1198621198631198601199062
max2115
) (2)
(c) At the end time during acceleration the power outputof the motor is the highest and the maximum powerdemand during acceleration is as follows
119875119895max
=
1
3600120578119879
(
120575119898V2119898
36119889119905
[1 minus (
119905119898
minus 119889119905
119905119898
)
119909
]
+ 119898119892119891V119898
+
119862119863119860
2115
V3119898)
(3)
where 120575 is correction coefficient of rotating mass V119898
is the speed at the end time during acceleration 119905119898is
acceleration time and 119909 is the fitting coefficient
According to the maximum power of the three indicatorsof dynamic performance described above the total powerdemand 119875peak should meet all the abovementioned require-ments that is
119875peak ge max (119875119906max 119875120572max 119875119895max) (4)
5 Parameter Matching for Electric Motors
Since electric motors have satisfactory working propertiesincluding rated property over long working hours and peakproperty for short working hours the output rated powerof these motors can fulfill the power requirement for themaximum speed while the peak power achieved by theelectric motors in a short working time can fulfill the carrsquosrequirements for acceleration and climbing Selection ofthe electric motors for propulsion includes the parameter
selection of motors A and B The preliminary standards areas follows motor B should mainly fulfill the requirements forclimbing and acceleration and the sum of the rated power ofthe twomotors should fulfill the demand for total powerTheexternal characteristics of the electric motors are as followsbelow the rated speed they work in a constant torque modeabove the rated speed they work in a constant power modeThe relevant parameters for motor selection include ratedpower peak power rated speed and the maximum speedSince the system uses the planetary gear set the transmissionproperties of the planetary gears should be taken into accountwhen matching the motor parameters
119899119904+ 119896119899119903minus (1 + 119896) 119899
119888= 0
119879119904 119879119903 119879119888= 1 119896 minus (1 + 119896)
(5)
where 119899119904is the sun gear speed 119899
119903is the gear ring speed 119899
119888
is the planet carrier speed 119879119904is the sun gear torque 119879
119903is the
gear ring torque 119879119888is the planet carrier torque and 119896 is the
planetary gear parameters it is equal to the gear ratio betweenthe gear ring and the sun gear
6 Parameter Matching for Electric Motors
Based on the working mechanism and mode of the systemthe matched motor parameters as well as the transmissionproperties of the planetary gear the range of the planetarygear set parameter 119896 and themain deceleration ratio 119894
0can be
calculated In order to fulfill the requirement of themaximumgradeability and the maximum speed 119896 and 119894
0should satisfy
the following conditions
(1 + 119896) sdot 1198940le
0377119903119899A119906119894
(1 + 119896) sdot 1198940ge
(119891 cos120572max + sin120572max)119898119892119903
119879B max120578119879
119899c max le
119899B max + 119896119899A max1 + 119896
119899c max ge
119906max sdot 1198940
0377119903
(6)
where 119899A is the rated power of motor A 119879B max is the peaktorque of motor B 119899c max is the maximum speed of planetcarrier and 119899A max is the peak speed of motor A
7 Parameter Matching for the Battery Pack
In the current study a lithium-ion battery pack with goodproperties was usedThe rated voltage of a single lithium-ionbattery unit is 32 V in the market The battery pack has 100units providing a total voltage of 320V the capacity of thebattery pack must be able to fulfill the requirements of thedriving range of a car as calculated below
119862 =
1000119875119890sdot 119904
119880 sdot 120585SOC sdot V119890
(7)
Discrete Dynamics in Nature and Society 5
Table 2 Parameter of electric vehicle
Parameter ValueMass (kg) 1250Full mass (kg) 1550Coefficient of drag 033Radius (m) 0302Frontal area (m2) 246Maximum speed (kmh) ge130Acceleration time (s) le14 (0sim100 kmh)Maximum gradeability () ge30Maximum range per chargekm ge120
where 119875119890is the vehicle power at a constant speed 119904 is the
driving range of design requirements119880 is the battery voltage120585SOC is battery discharge capacity coefficient effectively whichis the product of battery average efficiency andmotor averageefficiency and V
119890is the constant speed
8 Results for Parameter Matching of theDual-Motor Hybrid Drive System
Table 2 lists the technical parameters determined accordingto the project requirement and Table 3 presents the prelimi-nary matching results of the system parameters according tothe abovementioned matching standards
9 Parameter Optimization for the Dual-MotorHybrid Drive System in All-Electric Cars
The performance of all-electric cars is largely dependent onthe performance levels as well as the reasonable design ofthe system components An important and feasible techni-cal approach to improve the performance involves properconfiguration and optimization of the critical parameters forthe current system components [28] Based on the operatingcharacteristics of all-electric cars as well as the particularityin evaluating their performance the current study took intoaccount the dynamic and economic performance of thecars and set the acceleration time and driving range as theobjective functions to develop the dual-objective function ofdynamics and economic performance this function aimed toimprove the driving range of all-electric cars while fulfillingthe carrsquos dynamics requirement [29 30]
10 Development of ObjectiveFunctions for Optimization
101 Dynamic Performance Objective Function The objectivefunction for dynamic performance was built by consideringthe acceleration time that is the time that a car takes toaccelerate from a speed of 0 to 100 kmhThe shorter the time
Table 3 Powertrain parameter of electric vehicle
Parameter ValueMotor
Motor type Permasyn motorMotor A rated powerkW 176Motor A peak powerkW 352Motor A rated speedrmin 2536Motor A maximum speedrmin 6078Motor A peak torqueNm 13254Motor B rated powerkW 143Motor B peak powerkW 305Motor B rated speedrmin 2498Motor B maximum speedrmin 5964Motor B peak torqueNm 11659
PowertrainPlanetary gear parameters 32Final ratio 25
BatteryType Lithium-ion battery voltageTotal voltageV 320Nominal capacityAh 60Cells 100Single section voltageV 25sim34
the better the dynamic performance The acceleration time 119905
can be expressed as follows
1198911(119883) = 119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V (8)
where 119865119894is vehicle traction 119865
119891is vehicle rolling resistance
and 119865119908is vehicle air reaction
102 Economy Objective Function The driving range of afully charged car was used as the evaluator for economyunder the NEDC cycle The energy consumption at constantspeed as well as under uniformly accelerated motion wascalculated independently and then summed up the electriccarrsquos driving range for the entire cycle was obtained based onthe summation
1198912(119883) = 119871 =
119882119887
sum119882
sdot 119878 (9)
where 119878 is the distance under the NEDC cycle 119882119887is the
battery actually stored energy and sum119882 is the total energyconsumption
11 Fundamentals of Quantum GeneticIntelligence Optimization Algorithms
A highly accurate calculation procedure is to be adopted formultiobjective optimization which is a time-consuming pro-cess Most scholars tend to apply similar techniques to set theobjectives and constrain the model to conduct optimization
6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
Table 2 Parameter of electric vehicle
Parameter ValueMass (kg) 1250Full mass (kg) 1550Coefficient of drag 033Radius (m) 0302Frontal area (m2) 246Maximum speed (kmh) ge130Acceleration time (s) le14 (0sim100 kmh)Maximum gradeability () ge30Maximum range per chargekm ge120
where 119875119890is the vehicle power at a constant speed 119904 is the
driving range of design requirements119880 is the battery voltage120585SOC is battery discharge capacity coefficient effectively whichis the product of battery average efficiency andmotor averageefficiency and V
119890is the constant speed
8 Results for Parameter Matching of theDual-Motor Hybrid Drive System
Table 2 lists the technical parameters determined accordingto the project requirement and Table 3 presents the prelimi-nary matching results of the system parameters according tothe abovementioned matching standards
9 Parameter Optimization for the Dual-MotorHybrid Drive System in All-Electric Cars
The performance of all-electric cars is largely dependent onthe performance levels as well as the reasonable design ofthe system components An important and feasible techni-cal approach to improve the performance involves properconfiguration and optimization of the critical parameters forthe current system components [28] Based on the operatingcharacteristics of all-electric cars as well as the particularityin evaluating their performance the current study took intoaccount the dynamic and economic performance of thecars and set the acceleration time and driving range as theobjective functions to develop the dual-objective function ofdynamics and economic performance this function aimed toimprove the driving range of all-electric cars while fulfillingthe carrsquos dynamics requirement [29 30]
10 Development of ObjectiveFunctions for Optimization
101 Dynamic Performance Objective Function The objectivefunction for dynamic performance was built by consideringthe acceleration time that is the time that a car takes toaccelerate from a speed of 0 to 100 kmhThe shorter the time
Table 3 Powertrain parameter of electric vehicle
Parameter ValueMotor
Motor type Permasyn motorMotor A rated powerkW 176Motor A peak powerkW 352Motor A rated speedrmin 2536Motor A maximum speedrmin 6078Motor A peak torqueNm 13254Motor B rated powerkW 143Motor B peak powerkW 305Motor B rated speedrmin 2498Motor B maximum speedrmin 5964Motor B peak torqueNm 11659
PowertrainPlanetary gear parameters 32Final ratio 25
BatteryType Lithium-ion battery voltageTotal voltageV 320Nominal capacityAh 60Cells 100Single section voltageV 25sim34
the better the dynamic performance The acceleration time 119905
can be expressed as follows
1198911(119883) = 119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V (8)
where 119865119894is vehicle traction 119865
119891is vehicle rolling resistance
and 119865119908is vehicle air reaction
102 Economy Objective Function The driving range of afully charged car was used as the evaluator for economyunder the NEDC cycle The energy consumption at constantspeed as well as under uniformly accelerated motion wascalculated independently and then summed up the electriccarrsquos driving range for the entire cycle was obtained based onthe summation
1198912(119883) = 119871 =
119882119887
sum119882
sdot 119878 (9)
where 119878 is the distance under the NEDC cycle 119882119887is the
battery actually stored energy and sum119882 is the total energyconsumption
11 Fundamentals of Quantum GeneticIntelligence Optimization Algorithms
A highly accurate calculation procedure is to be adopted formultiobjective optimization which is a time-consuming pro-cess Most scholars tend to apply similar techniques to set theobjectives and constrain the model to conduct optimization
6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
Termination condition is satisfied
evaluation function
Quantum revolving door update populations and
Record the best chromosome and its fitness
Stop Yes
Perform quantum interference
Run model and output values of
No
Select the best individual as next-generationevolutionary goals
Start
Assign real value to each pixel encoded in population
Initialize population Q(t0) and values
Run model and obtain output values of fitness function for Q(t0)
functionEvaluate fitness of each Q(t0) using evaluation
Evaluate fitness of each Q(t) using
fitness function for Q(t)
get the next-generation population Q(t + 1)
t = t + 1
Figure 2 The proposed algorithm for quantum genetic algorithm
design in order to avoid directly solving the multiobjectiveoptimization thus better optimization efficiency can beachieved
Quantum genetic algorithm is a combination of thequantum algorithm and genetic algorithm which is a newlydeveloped intelligent algorithm that evolved from probabilitytheory and has better overall performance and ability toexplore data as compared to the performance and abilityof the genetic algorithm In recent years the quantumalgorithm has gained the attention of experts and scholarsin the area of multiobjective optimization [31 32] In 1996Narayanan conducted an analysis on the concept of quantummechanics and integrated them into genetic algorithmsquantum-inspired genetic algorithm that can solve the TSPproblem successfully was proposed based on this workQuantum genetic algorithm could conduct chromosomecoding by considering the probability amplitude of qubitsand it updated the chromosome by introducing a quantumdoor mechanism which added the advantage of quantumcomputing to the algorithm [33] Although quantum geneticalgorithm is a recent development and relative theories andmethods are not yet mature this method exhibited excellentperformance and showed great potential in dealing withmany complicated problems
In this algorithm a gene refers to a qubit A qubit containsall the possible information that a gene can carry whichmeans that every operation on the gene will exert influenceon all the possible information at the same time A qubit canbe in the 0 state in the 1 state or in any superposition betweenthe two
The state of a qubit can be expressed as follows1003816100381610038161003816120593⟩ = 120572 |0⟩ 120573 |1⟩ (10)
where 120572 and 120573 two amplitude constants that can be fit into thefollowing equation
|120572|2
+ lfloor120573rfloor2
= 1 (11)
where |120572|2 gives the probability of the qubit to be found in the
0 state and |120573|2 gives the probability of the qubit to be found
in the 1 stateThis is also called normalization state Similarlya system with 119899 qubits can be expressed as follows
[
1205721
1205722
and 120572119899
1205731
1205732
and 120572119899
] (12)
This system can have 2119899 states For these states |120572
119894|2
+
lfloor120573119894rfloor2
= 1 119894 = 1 2 and 119899 The calculation steps are as shownin Figure 2
12 Designing of Optimization Variablesand the Constrain Conditions
The motor propulsion parameter battery parameter andplanetary gear parameter affect the dynamic and economicperformances of a dual-motor hybrid drive systemThereforein the current study the critical parameters of the powersystem that are highly associated with vehicle performancewere chosen as the variables for optimization these parame-ters were planetary gear properties main deceleration ratio
Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
rate powers of motors A and B peak power rated revolutionthe maximum revolution and the battery capacity 119862 Thusvehicle performance can be expressed as a function of theseparameters as follows
119883
= [1198831 1198832 1198833 1198834 1198835 1198836 1198837 1198838 1198839 11988310 11988311]119879
= [119896 1198940 119875A0 119875B0 119875A max 119875B max 119899A0 119899B0 119899A max 119899B max 119862]
119879
(13)
Under specific driving conditions in order to maximizethe driving range while maintaining the dynamic index thevehicle should meet the performance standards for the max-imum stable speed as well as the maximum gradeability Forthese requirements and the design objective the constraintsare as follows
0 le 119875max A + 119875max B le 119875total
119905 =
1
36
int
100
0
120575119898119892
119865119894minus 119865119891minus 119865119908
119889V le 13
120 le 119871 =
119882119887
sum119882
sdot 119878
minus002 le ΔSOC le 002 minus02119896119882ℎ le Δ119864bat le 02119896119882ℎ
(14)
whereΔSOC is the change rate of SOCandΔ119864bat is the changerate of battery energy consumption
13 Development of a MathematicalOptimization Model
The abovementioned analysis suggests that the optimizationof parameters in the current study was in fact the globaloptimization for solving multiobjective and multiconstraintnonlinear functions Conventional optimization algorithmsusually require an accurate expression of mathematical func-tions and are therefore not suitable for global optimizationin the current study Intelligent optimization algorithmswere mostly developed by simulating certain behavior fromnature and biosphere that has similar thinking and behavioralstandards as humans hence they were more suitable for theiterative optimization process as described in the previoussection In the current work the quantum genetic intelligentoptimization algorithm described above was used [34] Inorder to convert the dual-objective optimization of dynamicand economic performances into a single objective optimiza-tion the dynamic function and the economy function wereweighted and then summed up Since the acceleration timeof the dynamic index and driving range of the economyindex had different magnitudes they were normalized thatis the dynamic function and economy function were dividedby their respective designing objectives The new objectiveoptimization function was as follows
119891 (119883) =
1205961sdot 1198911(1199091 1199092 1199093)
119886
+
1205962sdot 1198912(1199091 1199092 1199093)
119887
(15)
where 1205961and 120596
2are weighting factors they are greater
than zero and 119886 119887 are the design objective of dynamics andeconomy
14 Optimization and Simulation forAll-Electric Cars with the Double-MotorHybrid Driving System
141 Development of the Simulation and Optimization ModelOptimization calculation was conducted by the combinedsimulation of MatlabSimulink and AVL-Cruise softwareThe API function provided by the AVL-Cruise software wasused to develop the optimization model and vehicle controlstrategy on Simulink while vehicle model development andthe simulation calculation for vehicle performance wereconducted on the Cruise software Signals including load(traction and breaking) SOC and speed were transferred viathe interface of AVL-Cruise to MatlabSimulink which wasused to analyze these signals using its control strategy andoptimization calculation The analysis results were sent backto AVL-Cruise via the interface Simulation on the powersystem was conducted on the AVL-Cruise model Figure 3shows a schematic of the data transfer between Cruise andSimulink
The output values of the model have to be combinedto a vector by a multiplexer (MUX) After a successfulsimulation step Simulink transfers this output vector into theMatlab Workspace by the Matlab object ldquoBlock ParametersToWorkspacerdquowhereCRUISE can access it CRUISE gets thisvector and puts its elements onto the databus where they canbe used by other components
142 Optimization Results Quantum genetic algorithm wasused to perform the global optimization on the parameters ofthe dual-motor hybrid drive systembased on the results of thecombined simulation optimization scheme Figure 4 showsmotions of the vehicle under the NEDC cycle Algorithmparameters were set as follows the maximum number ofiteration was 400 and the population size was 100 After 400iterations the optimal objective value tended to remain thesame Figure 5 shows the convergence trend of the objectivevalue of the function in each generation of iteration andTable 4 lists the parameters in the transmission system afteroptimization
143 Comparison of Simulation Results before and after Opti-mization In order to verify experimentally the optimizationresults for the power system parameters of the all-electriccars equipped with the dual-motor hybrid drive system theparameters obtained from preliminary matching as well asthose from global optimization were simulated and verifiedon the combined simulation platform of MatlabSimulinkand AVL-Cruise Measurements were made for the drivingcycle of NEDC and the simulation results of the vehiclersquosdynamic performance and economy before and after opti-mizationwere compared and verifiedThe comparison resultsare presented in Table 5 and Figures 6 7 8 and 9
8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
In-portvector
elementsprovided
from Cruise
Constantblock
Constantblock 1
Gain 1
Gain2
3To workspace
block
Out-port vectorfrom
Simulinkprepared for
Cruise
In Vec(1)
In Vec(2)
Out Vec
Figure 3 Data exchange Cruise-Simulinktm for Matlab API
minus700
minus1400
Velo
city
vehi
cle(k
mh
)
Velocity vehicle (kmh)
Acce
lera
tion
vehi
cle(m
s2)
Acceleration vehicle (ms2)
1400 16
08
0
700
0
minus60000 minus08
minus16minus120000
60000
120000
0
0 1400 2800 4200 5600 7000 8400 9800 11200
Distance velocity of vehicle and acceleration of vehicle
Time (s)
Dist
ance
(m)
Distance (m)
Figure 4 NEDC drive cycles and vehicle state of motion
0 50 100 150 200 250 300 350 4000
05
1
15
2
3
Iterations
Fitn
ess
Figure 5 Convergence of QGA
Adoption of the optimized parameters for the powersystem led to a decrease of 021 s in the time required foraccelerating from 0 to 100 kmh and an increase of 141 kmhin the maximum speed In terms of economy at the endof a driving cycle the energy consumption was reduced
Table 4 Compared parameters before and after optimization
Parameter Original OptimizedMotor
Motor A rated powerkW 176 168Motor A peak powerkW 352 356Motor A rated speedrmin 2536 2455Motor A maximum speedrmin 6078 7569Motor A peak torqueNm 13254 13847Motor B rated powerkW 143 145Motor B peak powerkW 305 317Motor B rated speedrmin 2498 2593Motor B maximum speedrmin 5964 6579Motor B peak torqueNm 11659 11674
PowertrainPlanetary gear parameters 32 35Final ratio 25 36
BatteryNominal capacityAh 6353 5611
Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
Table 5The simulation results compared before and after optimiza-tion
Parameter Original OptimizedAcceleration time (s)(0sim100 kmh) 1206 1185
Maximum speed (kmh) 1386 1527Maximum gradeability () 3071 3365NEDC energy consumptionKJ 68408 62789Maximum range per chargekm 1256 13667
by 821 and the driving range was increased by 881after optimization At the same time the dual-motor hybrid-driving system for electric cars reduced energy consumptionof 156 comparedwith the conventional electric vehicle withsingle-speed reducers Figure 6 shows the time required foraccelerating from 0 to 100 kmh and the distance curve of thecar before and after optimization A considerable decreasein the acceleration time after optimization as well as theenhancement in vehicle dynamics can be clearly observedFigure 7 shows the SOC curve under NEDC before andafter optimization It shows that while the initial state ofthe battery was the same the SOC after optimization washigher than that before optimization at the end of a cyclein other words the battery consumption was lower andthe economy was higher after optimization Figure 8 showsthe change in the overall system efficiency of the transmis-sion system before and after optimization under differentcircumstances Figure 8 shows that after optimization theoverall efficiency increased and the power systemparametersafter optimization allowed the electric motors to work morefrequently in the high performance range this decreases theworking torque of the motor The working current of the all-electric cars as well as the winding loss was thus decreasedthereby improving the working performance of the motorFigure 9 shows the system energy consumption before andafter optimization the energy consumption at the end of acycle after optimization in all cases was lower than that beforeoptimization
15 Summary
The current study proposed a new dual-motor hybrid drivesystem for all-electric cars this system enables speed andtorque coupling between the two powering sources as wellas continuously variable transmission (CVT) under somecircumstances This system was also able to broaden the highperformance working range of the electric motors efficientlyand thus greatly widened the driving range of the electriccars while maintaining the dynamic performance Dual-objective optimization functions were developed for thetransmission system parameters of this dual-motor hybriddrive system By assigning the weight factors the quantumgenetic intelligence algorithm was used for optimizationcalculation which exhibited good convergence Satisfactoryresults were obtained by this method within limited time
0 2 4 8 100
20
40
60
80
100
120
620406080100120140160180200
6
Original accelerating timeOptimized accelerating timeOriginal accelerating distance Optimized accelerating distance
Accelerating time (s)
Velo
city
(km
h)
Acce
lera
ting
dista
nce (
m)
Figure 6 Simulation curve of accelerating time and distance
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Time (s)
Original SOC Optimized SOC
SOC
()
Figure 7 SOC curve of battery pack on NEDC drive cycles
in dealing with multiobjectives and multiparameter prob-lems indicating positive practical value and applicability forparameter optimization in the design of different hybridelectric cars A simulation and optimization platform forelectric cars was built based on the combined simulationof MatlabSimulink and AVL-Cruise software on which theoptimization simulation and verification of the parametersin the transmission system were conducted Results showedthat this platform is feasible and highly efficient and thatit can enhance the developmental efficiency of electric carsgreatly The method explored in the current study is suitablefor the hybrid drive system for matching and optimizingthe parameters of the transmission system Results fromthe simulation analysis showed that dynamics and economy
10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
Time (s)
OriginalOptimized
Syste
m effi
cien
cy (
)
Figure 8 System efficiency curve on NEDC drive cycles
0 200 400 600 800 1000 12000
1000
2000
3000
4000
5000
6000
7000
Time (s)
Ener
gy co
nsum
ptio
n (k
J)
OriginalOptimized
Figure 9 Energy consumption curve on NEDC drive cycles
parameters such as acceleration gradeability the maximumspeed and driving range of the electric cars equippedwith thedual-motor hybrid drive system met the design requirementhad high performance and saved energy
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors would like to express thanks to those whohelped in the research work and the preparation of this
paper and acknowledge the support from the State Key Labof Mechanical Transmission Chongqing University ChinaThis work was supported by the National Natural ScienceFoundation of China (no 51375505) and Scientific andTechnological Research Program of Chongqing MunicipalEducation Commission (no KJ1402903)
References
[1] M Ehsani Y Gao S E Gay and A Emadi Modern ElectricVehicles Hybrid Electric Vehicles and Fuel Cell VehiclesmdashBasicPrinciples Theory and Design Mechanical Industry Press Bei-jing China 2008
[2] C Quanshi Z Jialian and T Guangyu Advanced ElectricVehicle Technology Chemical Industry Press Beijing China2007
[3] C C Chan ldquoEngineering philosophy of electric vehiclesrdquoElectric Machines and Drives no 5 pp 255ndash257 1999
[4] C C Chan ldquoThe state of the art of electric hybrid and fuel cellvehiclesrdquo Proceedings of the IEEE vol 95 no 4 pp 704ndash7182007
[5] Z Rahman M Ehsani and K L Butler ldquoAn investigation ofelectric motor drive characteristics for EV and HEV propulsionsystemsrdquo SAE Paper 2000-01-3062 2000
[6] M Zeraoulia M E H Benbouzid and D Diallo ldquoElectricmotor drive selection issues for HEV propulsion systems acomparative studyrdquo IEEE Transactions on Vehicular Technologyvol 55 no 6 pp 1756ndash1764 2006
[7] Z Q Zhu and D Howe ldquoElectrical machines and drives forelectric hybrid and fuel cell vehiclesrdquo Proceedings of the IEEEvol 95 no 4 pp 746ndash765 2007
[8] W Yuning ldquoThe development strategy of electric vehiclesabroadrdquo Auto Industry Research no 9 pp 35ndash40 2005
[9] C Qingquan and S Liqing ldquoPresent status and future trends ofelectric vehiclesrdquo Technology Review vol 23 no 4 pp 24ndash282005
[10] M Kamiya ldquoDevelopment of traction drive motors for theToyota hybrid systemrdquo in Proceedings of the International PowerElectronics Conference Niigata Japan 2005
[11] J M Miller and M Everett ldquoAn assessment of ultra-capacitorsas the power cache in Toyota THS-II GM-allision AHS-2 andFord FHS hybrid propulsion systemsrdquo in Proceedings of the20th Annual IEEE Applied Power Electronics Conference andExposition vol 1 pp 481ndash490 Austin Tex USA March 2005
[12] T Dewen Basic research on electric drive system of batteryelectric vehicle [MS thesis] Harbin Institute of Technology2006
[13] J Xu Study on Permanent magnet Synchronous Motor DriveSystem in Electric Vehicle Application Shenyang University ofTechnology Shenyang China 2003
[14] S Nakazawa and Nissan Motor Company ldquoThe Nissan LEAFelectric powertrainrdquo in Proceedings of the 32nd InternationalesWiener Motorensymposium 2011
[15] L Chu Y Li and Q N Wang ldquoStudy on the parametricoptimization for a parallel hybrid electric vehicle power trainrdquoSAE Paper 2000-01-3109
[16] Y Dai L Song and S Cui ldquoDevelopment of PMSM drivesfor hybrid electric car applicationsrdquo IEEE Transactions onMagnetics vol 43 no 1 pp 434ndash437 2007
Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 11
[17] J Axsen and K Kurani The Early US Market for PHEVsAnticipating Consumer Awareness Recharve Potential DesignPriorities and Energy Impacts Institute of Transportation Stud-ies University of California Davis Calif USA 2008
[18] M Duoba H Ng and R Larsen ldquoIn-situ mapping and analysisof the Toyota Prius HEV enginerdquo SAE Paper 2000-01-30962000
[19] A Kawahashi ldquoA new-generation hybrid electric vehicle and itsimplications on power electronicsrdquo in Proceedings of the AnnualCenter for Power Electronics Systems Power Electronics Seminarpp 15ndash20 Center for Power Electronics Systems BlacksburgVa USA April 2004
[20] K Muta M Yamazaki and J Tokieda ldquoDevelopment of new-generation hybrid system THS IImdashdrastic improvement ofpower performance and fuel economyrdquo in SAE World Congressamp Exhibition 2004 SAE paper 2004-01-0064
[21] S J Moura H K Fathy D S Callaway and J L Stein ldquoAstochastic optimal control approach for power management inplug-in hybrid electric vehiclesrdquo IEEE Transactions on ControlSystems Technology vol 19 no 3 pp 545ndash555 2011
[22] L Serrao S Onori and G Rizzoni ldquoA comparative analysis ofenergymanagement strategies for hybrid electric vehiclesrdquo Jour-nal of Dynamic SystemsMeasurement andControl Transactionsof the ASME vol 133 no 3 Article ID 031012 2011
[23] X Wu and X Yin ldquoControl of a dual-motor coupling drivesystem on EV busesrdquo Chinese High Technology Letters vol 23no 8 pp 863ndash867 2013
[24] B Du Study on control strategy of mode switching and AMTshifting for a full hybrid electric vehicle with single motor [PhDthesis] Chongqing University 2012
[25] Z Feikun Research on Powertrain Parameters Design andVehicle Control Strategy for Pure Electric Vehicle Jilin University2013
[26] H KNg A D Vyas andD J Santini ldquoThe prospects for hybridelectric vehicles 2005ndash2020 results of a Delphi studyrdquo ArgonneNational Laboratory ANLESCP-99612 1999
[27] R A McGee ldquoModel based control system design and verifica-tion for a hybrid electric vehiclerdquo in Proceedings of the FutureTransportation Technology Conference Costa Mesa Calif USAJune 2003
[28] J Larminie and J Lowry Electric Vehicle Technology ExplainedJohn Wiley amp Sons New York NY USA 2012
[29] B Zhou Q Jiang and Y Yang ldquoTransmission ratio optimiza-tion with dual objectives of power performance and economyfor a two-speed electric vehiclerdquo Automotive Engineering vol33 no 9 pp 792ndash797 2011
[30] F Wang Z Fang and X Zhu ldquoMatching simulation andoptimization of the new power transmission device for anelectric vehiclerdquoAutomotive Engineering vol 33 no 9 pp 805ndash808 2011
[31] T Hey ldquoQuantum computing an introductionrdquo Computing ampControl Engineering Journal vol 10 no 3 pp 105ndash112 1999
[32] D Deutsch and R Jozsa ldquoRapid solution of problems byquantum computationrdquo Proceedings of the Royal Society AMathematical Physical and Engineering Sciences vol 439 no1907 pp 553ndash558 1992
[33] A Narayanan and M Moore ldquoQuantum-inspired genetic algo-rithmsrdquo in Proceedings of the IEEE International Conference onEvolutionary Computation (ICEC rsquo96) pp 61ndash66 IEEE PressPiscataway NJ USA May 1996
[34] D Buche Multi-objective evolutionary optimization of gas tur-bine components [PhD thesis] University of Stuttgart 2003
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of