Embed Size (px)
Citation preview

Research ArticleOn Full-State Hybrid Projective Synchronization ofGeneral Discrete Chaotic Systems
Adel Ouannas
LAMIS Laboratory Department of Mathematics and Computer Science University of Tebessa 12002 Tebessa Algeria
Correspondence should be addressed to Adel Ouannas ouannas adelyahoofr
Received 28 July 2014 Revised 27 September 2014 Accepted 28 September 2014 Published 14 October 2014
Academic Editor Ivo Petras
Copyright copy 2014 Adel OuannasThis is an open access article distributed under theCreative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The problems of full-state hybrid projective synchronization (FSHPS) and inverse full-state hybrid projective synchronization(IFSHPS) for general discrete chaotic systems are investigated in 2D Based on nonlinear control method and Lyapunov stabilitytheory new controllers are designed to study FSHPS and IFSHPS respectively for 2D arbitrary chaotic systems in discrete-timeNumerical example and simulations are used to validate the main results of this paper
1 Introduction
Many mathematical models of biological processes physicalprocesses and chemical processes etc were dened usingchaotic dynamical systems in discrete-time Recently moreand more attention were paid to chaos synchronizationin discrete-time dynamical systems [1ndash3] Synchronizationof discrete chaotic dynamical systems has also potentialapplications in secure communication [4 5] Since the workof Pecora and Carroll [6] various powerful methods andtechniques have been proposed to investigate chaos synchro-nization in dynamical systems [7 8] and different types ofsynchronization have been reported [9ndash11]
Recently a novel type of synchronization known as full-state hybrid projective synchronization (FSHPS) has beenintroduced and applied to chaotic systems in continuous-time [12] which includes projective synchronization (PS) andhybrid projective synchronization (HPS) In FSHPS eachresponse system state synchronizes with a linear combinationof drive system states By the same procedure we candefine a new type of synchronization called inverse full-state hybrid projective synchronization (IFSHPS) when eachdrive system state synchronizes with a linear combination ofresponse system states
In this paper based on nonlinear control method in2D and discrete-time Lyapunov stability theory firstly anew synchronization controller is designed for full-statehybrid projective synchronization (FSHPS) of general chaotic
systems Secondly a new control scheme is proposed tostudy the problem of inverse full-state hybrid projectivesynchronization (IFSHPS) for arbitrary chaotic systems Thesynchronization criterions derived in this paper are estab-lished in the form of simple algebraic conditions about thelinear part of the response system and the drive systemrespectively which are very convenient to verify In orderto show the effectiveness of the proposed synchronizationschemes our approach is applied to the drive Fold discrete-time system and the controlled Lorenz discrete-time systemto achieve FSHPS and IFSHPS respectively
The remainder of this paper is organized as follows InSection 2 definitions of FSHPS and IFSHPS are introducedIn Section 3 a new controller is designed to study FSHPSIn Section 4 a new synchronization criterion for IFSHPS isderived In Section 5 numerical application and simulationsare given to show the use of the proposed control schemes andthe derived synchronization criterions Finally conclusion isfollowed in Section 6
2 Definitions of FSHPS and IFSHPS
Consider the following coupled chaotic systems
119909119894 (119896 + 1) = 119891
119894 (119883 (119896))
119910119894 (119896 + 1) = 119892
119894 (119884 (119896)) + 119906
119894
1 le 119894 le 119899
(1)
Hindawi Publishing CorporationJournal of Nonlinear DynamicsVolume 2014 Article ID 983293 6 pageshttpdxdoiorg1011552014983293
2 Journal of Nonlinear Dynamics
where 119883(119896) = (119909119894(119896))1le119894le119899
119884(119896) = (119910119894(119896))1le119894le119899
are the statevectors of drive system and response system respectively 119891
119894
R119899 rarr R 119892119894 R119899 rarr R (1 le 119894 le 119899) and 119906
119894 (1 le 119894 le 119899) are
controllersWe present the definition of full-state hybrid projective
synchronization (FSHPS) for the drive-response chaotic sys-tems (1)
Definition 1 The coupled drive-response chaotic systems (1)are in full-state hybrid projective synchronization (FSHPS)when for an initial condition there exist controllers 119906
119894 (1 le
119894 le 119899) and given real constants (120579119894119895) isin R119899times119899 such that the
synchronization errors
119890119894 (119896) = 119910
119894 (119896) minus
119899
sum
119894=1
120579119894119895119909119895 (119896) 1 le 119894 le 119899 (2)
satisfy that lim119896rarrinfin
119890119894 (119896) = 0 for 119894 = 1 2 119899
The definition of inverse full-state hybrid projectivesynchronization (IFSHPS) is given next
Definition 2 The coupled drive-response chaotic systems (1)are in inverse full-state hybrid projective synchronization(IFSHPS) when for an initial condition there exist con-trollers (119906
119894)1le119894le119899
and given real constant (120579119894119895) isin R119899times119899 such
that the synchronization errors
119890119894 (119896) = 119909
119894 (119896) minus
119899
sum
119894=1
120579119894119895119910119895 (119896) 1 le 119894 le 119899 (3)
satisfy that lim119896rarrinfin
119890119894 (119896) = 0 for 119894 = 1 2 119899
3 Controller Design for FSHPS in 2D
In this section we consider the drive system in the followingform
1199091 (119896 + 1) = 119891
1 (119883 (119896))
1199092 (119896 + 1) = 119891
2 (119883 (119896))
(4)
where119883 (119896) = (1199091 (119896) 1199092 (
119896))119879 is the state vector of the drive
system (4) 119891119894 R2 rarr R (119894 = 1 2)
As the response system we consider the following chaoticsystem
1199101 (119896 + 1) =
2
sum
119895=1
1198871119895119910119895 (119896) + 119892
1 (119884 (119896)) + 119906
1
1199102 (119896 + 1) =
2
sum
119895=1
1198872119895119910119895 (119896) + 119892
2 (119884 (119896)) + 119906
2
(5)
where 119884 (119896) = (1199101 (119896) 1199102 (
119896))119879 is the state vector of the
response system (5) (119887119894119895) isin R2times2 119892
119894 R2 rarr R (119894 = 1 2) are
nonlinear functions and (1199061 1199062)119879 is the vector controller
According to the definition of FSHPS the synchroniza-tion errors between the drive system (4) and the responsesystem (5) are defined as
1198901 (119896 + 1) = 119910
1 (119896 + 1) minus 120579
111199091 (119896 + 1) minus 120579
121199092 (119896 + 1)
1198902 (119896 + 1) = 119910
2 (119896 + 1) minus 120579
211199091 (119896 + 1) minus 120579
221199092 (119896 + 1)
(6)
where (120579119894119895) isin R2times2 are arbitrary scaling constants
Then the synchronization errors of FSHPS betweensystems (4) and (5) can be derived as
1198901 (119896 + 1) =
2
sum
119895=1
1198871119895119890119895 (119896) + 119871
1+ 1198731+ 1199061
1198902 (119896 + 1) =
2
sum
119895=1
1198872119895119890119895 (119896) + 119871
2+ 1198732+ 1199062
(7)
where
1198711=
2
sum
119895=1
1205821119895119909119895 (119896)
1198712=
2
sum
119895=1
1205822119895119909119895 (119896)
(8)
where
12058211= 1198871112057911+ 1198871212057921
12058212= 1198871112057912+ 1198871212057922
12058221= 1198872112057911+ 1198872212057921
12058222= 1198872112057912+ 1198872212057922
1198731= 1198921minus 120579111198911minus 120579121198912
1198732= 1198922minus 120579211198911minus 120579221198912
(9)
To achieve FSHPS between systems (4) and (5) we choosethe synchronization controllers as
1199061= (11988722minus 1198971) 1198901 (119896) + (119887
21minus 1198972) 1198902 (119896) minus 119871
1minus 1198731
1199062= (11988712minus 1198972) 1198901 (119896) minus (2119887
22+ 11988711minus 1198972) 1198902 (119896)
minus 1198712minus 1198732
(10)
where 1198971and 1198972are control constants to be determined
Theorem 3 If the control constants (119897119894)1le119894le2
are chosen suchthat
(11988711+ 11988722minus 1198971)2+ (11988721+ 11988712minus 1198972)2lt 1 (11)
then the drive system (4) and the response (5) are globally full-state hybrid projective synchronized
Journal of Nonlinear Dynamics 3
Proof By substituting the control law (10) into (7) thesynchronization errors can be written as
1198901 (119896 + 1) = (119887
11+ 11988722minus 1198971) 1198901 (119896)
+ (11988712+ 11988721minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119887
21+ 11988712minus 1198972) 1198901 (119896)
minus (11988722+ 11988711minus 1198971) 1198902 (119896)
(12)
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (13)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= ((11988711+ 11988722minus 1198971)2+ (11988721+ 11988712minus 1198972)2minus 1)
sdot (1198902
1(119896) + 119890
2
2(119896))
+ 2 [(11988711+ 11988722minus 1198971) (11988712+ 11988722minus 1198972)
minus (11988721+ 11988712minus 1198972) (11988711+ 11988722minus 1198971)]
sdot 1198901 (119896) 1198902 (
119896)
(14)
By using (11) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (4) and (5)are globally full-state hybrid projective synchronized
4 New Criterion for IFSHPS in 2D
Now we consider the drive and the response chaotic systemsare in the following forms
119909119894 (119896 + 1) =
2
sum
119895=1
119886119894119895119909119895 (119896) + 119891
119894 (119883 (119896)) 1 le 119894 le 2 (15)
119910119894 (119896 + 1) = 119892
119894 (119884 (119896)) + 119906
119894 1 le 119894 le 2 (16)
where 119883(119896) = (1199091(119896) 1199092(119896))119879 119884 (119896) = (119910
1(119896) 1199102(119896))119879 are
the state vectors of drive system and the response systemsrespectively (119886
119894119895) isin R2times2 119891
119894 R2 rarr R (119894 = 1 2) are
nonlinear functions 119892119894 R2 rarr R (119894 = 1 2) and (119906
119894)1le119894le2
are synchronization controllersAccording to the definition of IFSHPS the synchroniza-
tion errors between the drive system (15) and the responsesystem (16) are defined as
1198901 (119896 + 1) = 119909
1 (119896 + 1) minus 120579
111199101 (119896 + 1) minus 120579
121199102 (119896 + 1)
1198902 (119896 + 1) = 119909
2 (119896 + 1) minus 120579
211199101 (119896 + 1) minus 120579
221199102 (119896 + 1)
(17)
where (120579119894119895) isin R2times2 are scaling constants
Then the synchronization errors of IFSHPS betweensystems (15) and (16) can be derived as
1198901 (119896 + 1) = (119886
21minus 1198971) 1198901 (119896) minus (119886
22+ 211988612minus 1198972) 1198902 (119896)
+ 1198771minus
2
sum
119895=1
1205791119895119906119895
1198902 (119896 + 1) = (119886
11minus 1198971) 1198901 (119896) + (119886
12minus 1198972) 1198902 (119896) + 119877
2
minus
2
sum
119895=1
1205792119895119906119895
(18)
where (119897119894)1le119894le2
are control constants and
1198771=
2
sum
119895=1
1205821119895119910119895 (119896) + 119891
1minus 120579111198921minus 120579121198922
1198772=
2
sum
119895=1
1205822119895119910119895 (119896) + 119891
2minus 120579211198921minus 120579221198922
(19)
where12058211= 1198861112057911+ 1198861212057921
12058212= 1198861112057912+ 1198861212057922
12058221= 1198862112057911+ 1198862212057921
12058222= 1198862112057912+ 1198862212057922
(20)
To achieve IFSHPS between systems (15) and (16) weassume that
1205791112057922
= 1205791212057921 (21)
and we choose the synchronization controllers as
1199061=
120579221198771minus 120579121198772
1205791212057921minus 1205791112057922
1199062=
120579111198772minus 120579211198771
1205791212057921minus 1205791112057922
(22)
Theorem 4 If the control constants (119897119894)1le119894le2
are chosen suchthat
100381610038161003816100381611988611+ 11988621minus 1198971
1003816100381610038161003816lt
1
radic2
100381610038161003816100381611988622+ 11988612minus 1198972
1003816100381610038161003816lt
1
radic2
(23)
then the drive system (15) and the response (16) are globallyinverse full-state hybrid projective synchronized
Proof By substituting control law (22) into (18) the synchro-nization errors can be written as
1198901 (119896 + 1) = (119886
11+ 11988621minus 1198971) 1198901 (119896)
minus (11988612+ 11988622minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119886
21+ 11988611minus 1198971) 1198901 (119896)
+ (11988622+ 11988612minus 1198972) 1198902 (119896)
(24)
4 Journal of Nonlinear Dynamics
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (25)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= (2(11988611+ 11988621minus 1198971)2minus 1) 119890
2
1(119896)
+ (2(11988622+ 11988612minus 1198972)2minus 1) 119890
2
1(119896)
+ 2 [(11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)
minus (11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)]
sdot 1198901 (119896) 1198902 (
119896)
(26)
By using (23) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (15) and(16) are globally inverse full-state hybrid projective synchro-nized
5 Numerical Application and Simulations
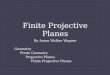
We consider the discrete-time Fold system system as thedrive system and the controlled Lorenz discrete-time asthe response system The discrete-time Fold system can bedescribed as
1199091 (119896 + 1) = 120572119909
1 (119896) + 119909
2 (119896)
1199092 (119896 + 1) = 119909
2
1(119896) + 120573
(27)
which has a chaotic attractor for example when (120572 120573) =
(minus01minus17) [13] The discrete-time Fold system is shown inFigure 1
The controlled Lorenz discrete-time system can bedescribed as
1199101 (119896 + 1) = (1 + 119886119887) 1199101 (
119896) minus 1198871199101 (119896) 1199102 (
119896) + 1199061
1199102 (119896 + 1) = (1 minus 119887) 1199102 (
119896) + 1198871199102
1(119896) + 119906
2
(28)
where 119880 = (1199061 1199062)119879 is the vector controller The Lorenz
discrete-time has a chaotic attractor for example when(119886 119887) = (125 075) [13] The chaotic attractor of the Lorenzdiscrete-time system is shown in Figure 2
1
05
0
minus05
minus1
minus15
151050minus05minus1minus15
y1
y2
Figure 1 Chaotic attractor of Fold discrete-time system when(120572 120573) = (minus01 minus17)
4
3
2
1
0
210minus1minus2
y1
y2
Figure 2 Chaotic attractor of Lorenz discrete-time system when(119886 119887) = (125 075)
51 FSHPS between the Discrete-Time Fold System and theControlled Lorenz Discrete-Time System Her according toour approach presented in Section 3 we obtain
(
11988711
11988712
11988721
11988722
) = (
1 + 119886119887 0
0 1 minus 119887)
1198901 (119896 + 1) = [2 + (119886 minus 1) 119887 minus 119897
1] 1198901 (119896) minus 11989721198902 (119896)
1198902 (119896 + 1) = minus119897
21198901 (119896) minus [2 + (119886 minus 1) 119887 minus 119897
1] 1198902 (119896)
(29)
Journal of Nonlinear Dynamics 5
5 10 15 20 25
0
02
04
06
minus08
minus06
minus04
minus02
e1
e2
Figure 3 Time evolution of FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
Corollary 5 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally full-statehybrid projective synchronized if the control constants arechosen such that
(218 minus 1198971)2+ 1198972
2lt 1 (30)
If we take (1198971 1198972) = (2 05) and by using Matlab we get
the numeric result that is shown in Figure 3
52 Inverse FSHPS between the Discrete-Time Fold System andthe Controlled Lorenz Discrete-Time System Now accordingto our approach presented in Section 4 we obtain
(
11988611
11988612
11988621
11988622
) = (
120572 1
0 0)
1198901 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) minus (1 minus 119897
2) 1198902 (119896)
1198902 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) + (1 minus 119897
2) 1198902 (119896)
(31)
Corollary 6 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally inverse full-state hybrid projective synchronized if the control constants arechosen such that
minus08 lt 1198971lt 06
03 lt 1198972lt 17
(32)
Finally if we take (1198971 1198972) = (05 1) and by using Matlab
we get the numeric result that is shown in Figure 4
6 Conclusion
In this paper to study FSHPS and IFSHPS between arbi-trary chaotic dynamical systems in 2D discrete-time a new
e1
e2
03
02
01
0
minus01
minus02
minus03
minus04
minus051110987654321
Figure 4 Time evolution of inverse FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
nonlinear control method was presented It was shownthat the proposed synchronization criterions were based onsimple and effective results Firstly FSHPS is achieved bycontrolling the linear part of the response system SecondlyIFSHPS is guaranteedwhen the linear part of the drive systemis controlled Finally numerical example and simulationsresults were utilized to illustrate the effectiveness of theproposed schemes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Liu Z M Wang and W D Zhang ldquoControlled synchro-nization of discrete-time chaotic systems under communicationconstraintsrdquo Nonlinear Dynamics vol 69 no 1-2 pp 223ndash2302012
[2] G Grassi ldquoArbitrary full-state hybrid projective synchroniza-tion for chaotic discrete-time systems via a scalar signalrdquoChinese Physics B vol 21 no 6 Article ID 060504 2012
[3] Z Yan ldquoQ-S synchronization in 3D Henon-like map andgeneralized Henon map via a scalar controllerrdquo Physics LettersA vol 342 no 4 pp 309ndash317 2005
[4] J G Lu and Y G Xi ldquoChaos communication based on synchro-nization of discrete-time chaotic systemsrdquo Chinese Physics vol14 no 2 pp 274ndash278 2005
[5] E Solak ldquoCryptanalysis of observer based discrete-time chaoticencryption schemesrdquo International Journal of Bifurcation andChaos inApplied Sciences andEngineering vol 15 no 2 pp 653ndash658 2005
[6] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Journal of Nonlinear Dynamics
where 119883(119896) = (119909119894(119896))1le119894le119899
119884(119896) = (119910119894(119896))1le119894le119899
are the statevectors of drive system and response system respectively 119891
119894
R119899 rarr R 119892119894 R119899 rarr R (1 le 119894 le 119899) and 119906
119894 (1 le 119894 le 119899) are
controllersWe present the definition of full-state hybrid projective
synchronization (FSHPS) for the drive-response chaotic sys-tems (1)
Definition 1 The coupled drive-response chaotic systems (1)are in full-state hybrid projective synchronization (FSHPS)when for an initial condition there exist controllers 119906
119894 (1 le
119894 le 119899) and given real constants (120579119894119895) isin R119899times119899 such that the
synchronization errors
119890119894 (119896) = 119910
119894 (119896) minus
119899
sum
119894=1
120579119894119895119909119895 (119896) 1 le 119894 le 119899 (2)
satisfy that lim119896rarrinfin
119890119894 (119896) = 0 for 119894 = 1 2 119899
The definition of inverse full-state hybrid projectivesynchronization (IFSHPS) is given next
Definition 2 The coupled drive-response chaotic systems (1)are in inverse full-state hybrid projective synchronization(IFSHPS) when for an initial condition there exist con-trollers (119906
119894)1le119894le119899
and given real constant (120579119894119895) isin R119899times119899 such
that the synchronization errors
119890119894 (119896) = 119909
119894 (119896) minus
119899
sum
119894=1
120579119894119895119910119895 (119896) 1 le 119894 le 119899 (3)
satisfy that lim119896rarrinfin
119890119894 (119896) = 0 for 119894 = 1 2 119899
3 Controller Design for FSHPS in 2D
In this section we consider the drive system in the followingform
1199091 (119896 + 1) = 119891
1 (119883 (119896))
1199092 (119896 + 1) = 119891
2 (119883 (119896))
(4)
where119883 (119896) = (1199091 (119896) 1199092 (
119896))119879 is the state vector of the drive
system (4) 119891119894 R2 rarr R (119894 = 1 2)
As the response system we consider the following chaoticsystem
1199101 (119896 + 1) =
2
sum
119895=1
1198871119895119910119895 (119896) + 119892
1 (119884 (119896)) + 119906
1
1199102 (119896 + 1) =
2
sum
119895=1
1198872119895119910119895 (119896) + 119892
2 (119884 (119896)) + 119906
2
(5)
where 119884 (119896) = (1199101 (119896) 1199102 (
119896))119879 is the state vector of the
response system (5) (119887119894119895) isin R2times2 119892
119894 R2 rarr R (119894 = 1 2) are
nonlinear functions and (1199061 1199062)119879 is the vector controller
According to the definition of FSHPS the synchroniza-tion errors between the drive system (4) and the responsesystem (5) are defined as
1198901 (119896 + 1) = 119910
1 (119896 + 1) minus 120579
111199091 (119896 + 1) minus 120579
121199092 (119896 + 1)
1198902 (119896 + 1) = 119910
2 (119896 + 1) minus 120579
211199091 (119896 + 1) minus 120579
221199092 (119896 + 1)
(6)
where (120579119894119895) isin R2times2 are arbitrary scaling constants
Then the synchronization errors of FSHPS betweensystems (4) and (5) can be derived as
1198901 (119896 + 1) =
2
sum
119895=1
1198871119895119890119895 (119896) + 119871
1+ 1198731+ 1199061
1198902 (119896 + 1) =
2
sum
119895=1
1198872119895119890119895 (119896) + 119871
2+ 1198732+ 1199062
(7)
where
1198711=
2
sum
119895=1
1205821119895119909119895 (119896)
1198712=
2
sum
119895=1
1205822119895119909119895 (119896)
(8)
where
12058211= 1198871112057911+ 1198871212057921
12058212= 1198871112057912+ 1198871212057922
12058221= 1198872112057911+ 1198872212057921
12058222= 1198872112057912+ 1198872212057922
1198731= 1198921minus 120579111198911minus 120579121198912
1198732= 1198922minus 120579211198911minus 120579221198912
(9)
To achieve FSHPS between systems (4) and (5) we choosethe synchronization controllers as
1199061= (11988722minus 1198971) 1198901 (119896) + (119887
21minus 1198972) 1198902 (119896) minus 119871
1minus 1198731
1199062= (11988712minus 1198972) 1198901 (119896) minus (2119887
22+ 11988711minus 1198972) 1198902 (119896)
minus 1198712minus 1198732
(10)
where 1198971and 1198972are control constants to be determined
Theorem 3 If the control constants (119897119894)1le119894le2
are chosen suchthat
(11988711+ 11988722minus 1198971)2+ (11988721+ 11988712minus 1198972)2lt 1 (11)
then the drive system (4) and the response (5) are globally full-state hybrid projective synchronized
Journal of Nonlinear Dynamics 3
Proof By substituting the control law (10) into (7) thesynchronization errors can be written as
1198901 (119896 + 1) = (119887
11+ 11988722minus 1198971) 1198901 (119896)
+ (11988712+ 11988721minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119887
21+ 11988712minus 1198972) 1198901 (119896)
minus (11988722+ 11988711minus 1198971) 1198902 (119896)
(12)
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (13)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= ((11988711+ 11988722minus 1198971)2+ (11988721+ 11988712minus 1198972)2minus 1)
sdot (1198902
1(119896) + 119890
2
2(119896))
+ 2 [(11988711+ 11988722minus 1198971) (11988712+ 11988722minus 1198972)
minus (11988721+ 11988712minus 1198972) (11988711+ 11988722minus 1198971)]
sdot 1198901 (119896) 1198902 (
119896)
(14)
By using (11) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (4) and (5)are globally full-state hybrid projective synchronized
4 New Criterion for IFSHPS in 2D
Now we consider the drive and the response chaotic systemsare in the following forms
119909119894 (119896 + 1) =
2
sum
119895=1
119886119894119895119909119895 (119896) + 119891
119894 (119883 (119896)) 1 le 119894 le 2 (15)
119910119894 (119896 + 1) = 119892
119894 (119884 (119896)) + 119906
119894 1 le 119894 le 2 (16)
where 119883(119896) = (1199091(119896) 1199092(119896))119879 119884 (119896) = (119910
1(119896) 1199102(119896))119879 are
the state vectors of drive system and the response systemsrespectively (119886
119894119895) isin R2times2 119891
119894 R2 rarr R (119894 = 1 2) are
nonlinear functions 119892119894 R2 rarr R (119894 = 1 2) and (119906
119894)1le119894le2
are synchronization controllersAccording to the definition of IFSHPS the synchroniza-
tion errors between the drive system (15) and the responsesystem (16) are defined as
1198901 (119896 + 1) = 119909
1 (119896 + 1) minus 120579
111199101 (119896 + 1) minus 120579
121199102 (119896 + 1)
1198902 (119896 + 1) = 119909
2 (119896 + 1) minus 120579
211199101 (119896 + 1) minus 120579
221199102 (119896 + 1)
(17)
where (120579119894119895) isin R2times2 are scaling constants
Then the synchronization errors of IFSHPS betweensystems (15) and (16) can be derived as
1198901 (119896 + 1) = (119886
21minus 1198971) 1198901 (119896) minus (119886
22+ 211988612minus 1198972) 1198902 (119896)
+ 1198771minus
2
sum
119895=1
1205791119895119906119895
1198902 (119896 + 1) = (119886
11minus 1198971) 1198901 (119896) + (119886
12minus 1198972) 1198902 (119896) + 119877
2
minus
2
sum
119895=1
1205792119895119906119895
(18)
where (119897119894)1le119894le2
are control constants and
1198771=
2
sum
119895=1
1205821119895119910119895 (119896) + 119891
1minus 120579111198921minus 120579121198922
1198772=
2
sum
119895=1
1205822119895119910119895 (119896) + 119891
2minus 120579211198921minus 120579221198922
(19)
where12058211= 1198861112057911+ 1198861212057921
12058212= 1198861112057912+ 1198861212057922
12058221= 1198862112057911+ 1198862212057921
12058222= 1198862112057912+ 1198862212057922
(20)
To achieve IFSHPS between systems (15) and (16) weassume that
1205791112057922
= 1205791212057921 (21)
and we choose the synchronization controllers as
1199061=
120579221198771minus 120579121198772
1205791212057921minus 1205791112057922
1199062=
120579111198772minus 120579211198771
1205791212057921minus 1205791112057922
(22)
Theorem 4 If the control constants (119897119894)1le119894le2
are chosen suchthat
100381610038161003816100381611988611+ 11988621minus 1198971
1003816100381610038161003816lt
1
radic2
100381610038161003816100381611988622+ 11988612minus 1198972
1003816100381610038161003816lt
1
radic2
(23)
then the drive system (15) and the response (16) are globallyinverse full-state hybrid projective synchronized
Proof By substituting control law (22) into (18) the synchro-nization errors can be written as
1198901 (119896 + 1) = (119886
11+ 11988621minus 1198971) 1198901 (119896)
minus (11988612+ 11988622minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119886
21+ 11988611minus 1198971) 1198901 (119896)
+ (11988622+ 11988612minus 1198972) 1198902 (119896)
(24)
4 Journal of Nonlinear Dynamics
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (25)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= (2(11988611+ 11988621minus 1198971)2minus 1) 119890
2
1(119896)
+ (2(11988622+ 11988612minus 1198972)2minus 1) 119890
2
1(119896)
+ 2 [(11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)
minus (11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)]
sdot 1198901 (119896) 1198902 (
119896)
(26)
By using (23) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (15) and(16) are globally inverse full-state hybrid projective synchro-nized
5 Numerical Application and Simulations
We consider the discrete-time Fold system system as thedrive system and the controlled Lorenz discrete-time asthe response system The discrete-time Fold system can bedescribed as
1199091 (119896 + 1) = 120572119909
1 (119896) + 119909
2 (119896)
1199092 (119896 + 1) = 119909
2
1(119896) + 120573
(27)
which has a chaotic attractor for example when (120572 120573) =
(minus01minus17) [13] The discrete-time Fold system is shown inFigure 1
The controlled Lorenz discrete-time system can bedescribed as
1199101 (119896 + 1) = (1 + 119886119887) 1199101 (
119896) minus 1198871199101 (119896) 1199102 (
119896) + 1199061
1199102 (119896 + 1) = (1 minus 119887) 1199102 (
119896) + 1198871199102
1(119896) + 119906
2
(28)
where 119880 = (1199061 1199062)119879 is the vector controller The Lorenz
discrete-time has a chaotic attractor for example when(119886 119887) = (125 075) [13] The chaotic attractor of the Lorenzdiscrete-time system is shown in Figure 2
1
05
0
minus05
minus1
minus15
151050minus05minus1minus15
y1
y2
Figure 1 Chaotic attractor of Fold discrete-time system when(120572 120573) = (minus01 minus17)
4
3
2
1
0
210minus1minus2
y1
y2
Figure 2 Chaotic attractor of Lorenz discrete-time system when(119886 119887) = (125 075)
51 FSHPS between the Discrete-Time Fold System and theControlled Lorenz Discrete-Time System Her according toour approach presented in Section 3 we obtain
(
11988711
11988712
11988721
11988722
) = (
1 + 119886119887 0
0 1 minus 119887)
1198901 (119896 + 1) = [2 + (119886 minus 1) 119887 minus 119897
1] 1198901 (119896) minus 11989721198902 (119896)
1198902 (119896 + 1) = minus119897
21198901 (119896) minus [2 + (119886 minus 1) 119887 minus 119897
1] 1198902 (119896)
(29)
Journal of Nonlinear Dynamics 5
5 10 15 20 25
0
02
04
06
minus08
minus06
minus04
minus02
e1
e2
Figure 3 Time evolution of FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
Corollary 5 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally full-statehybrid projective synchronized if the control constants arechosen such that
(218 minus 1198971)2+ 1198972
2lt 1 (30)
If we take (1198971 1198972) = (2 05) and by using Matlab we get
the numeric result that is shown in Figure 3
52 Inverse FSHPS between the Discrete-Time Fold System andthe Controlled Lorenz Discrete-Time System Now accordingto our approach presented in Section 4 we obtain
(
11988611
11988612
11988621
11988622
) = (
120572 1
0 0)
1198901 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) minus (1 minus 119897
2) 1198902 (119896)
1198902 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) + (1 minus 119897
2) 1198902 (119896)
(31)
Corollary 6 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally inverse full-state hybrid projective synchronized if the control constants arechosen such that
minus08 lt 1198971lt 06
03 lt 1198972lt 17
(32)
Finally if we take (1198971 1198972) = (05 1) and by using Matlab
we get the numeric result that is shown in Figure 4
6 Conclusion
In this paper to study FSHPS and IFSHPS between arbi-trary chaotic dynamical systems in 2D discrete-time a new
e1
e2
03
02
01
0
minus01
minus02
minus03
minus04
minus051110987654321
Figure 4 Time evolution of inverse FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
nonlinear control method was presented It was shownthat the proposed synchronization criterions were based onsimple and effective results Firstly FSHPS is achieved bycontrolling the linear part of the response system SecondlyIFSHPS is guaranteedwhen the linear part of the drive systemis controlled Finally numerical example and simulationsresults were utilized to illustrate the effectiveness of theproposed schemes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Liu Z M Wang and W D Zhang ldquoControlled synchro-nization of discrete-time chaotic systems under communicationconstraintsrdquo Nonlinear Dynamics vol 69 no 1-2 pp 223ndash2302012
[2] G Grassi ldquoArbitrary full-state hybrid projective synchroniza-tion for chaotic discrete-time systems via a scalar signalrdquoChinese Physics B vol 21 no 6 Article ID 060504 2012
[3] Z Yan ldquoQ-S synchronization in 3D Henon-like map andgeneralized Henon map via a scalar controllerrdquo Physics LettersA vol 342 no 4 pp 309ndash317 2005
[4] J G Lu and Y G Xi ldquoChaos communication based on synchro-nization of discrete-time chaotic systemsrdquo Chinese Physics vol14 no 2 pp 274ndash278 2005
[5] E Solak ldquoCryptanalysis of observer based discrete-time chaoticencryption schemesrdquo International Journal of Bifurcation andChaos inApplied Sciences andEngineering vol 15 no 2 pp 653ndash658 2005
[6] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Nonlinear Dynamics 3
Proof By substituting the control law (10) into (7) thesynchronization errors can be written as
1198901 (119896 + 1) = (119887
11+ 11988722minus 1198971) 1198901 (119896)
+ (11988712+ 11988721minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119887
21+ 11988712minus 1198972) 1198901 (119896)
minus (11988722+ 11988711minus 1198971) 1198902 (119896)
(12)
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (13)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= ((11988711+ 11988722minus 1198971)2+ (11988721+ 11988712minus 1198972)2minus 1)
sdot (1198902
1(119896) + 119890
2
2(119896))
+ 2 [(11988711+ 11988722minus 1198971) (11988712+ 11988722minus 1198972)
minus (11988721+ 11988712minus 1198972) (11988711+ 11988722minus 1198971)]
sdot 1198901 (119896) 1198902 (
119896)
(14)
By using (11) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (4) and (5)are globally full-state hybrid projective synchronized
4 New Criterion for IFSHPS in 2D
Now we consider the drive and the response chaotic systemsare in the following forms
119909119894 (119896 + 1) =
2
sum
119895=1
119886119894119895119909119895 (119896) + 119891
119894 (119883 (119896)) 1 le 119894 le 2 (15)
119910119894 (119896 + 1) = 119892
119894 (119884 (119896)) + 119906
119894 1 le 119894 le 2 (16)
where 119883(119896) = (1199091(119896) 1199092(119896))119879 119884 (119896) = (119910
1(119896) 1199102(119896))119879 are
the state vectors of drive system and the response systemsrespectively (119886
119894119895) isin R2times2 119891
119894 R2 rarr R (119894 = 1 2) are
nonlinear functions 119892119894 R2 rarr R (119894 = 1 2) and (119906
119894)1le119894le2
are synchronization controllersAccording to the definition of IFSHPS the synchroniza-
tion errors between the drive system (15) and the responsesystem (16) are defined as
1198901 (119896 + 1) = 119909
1 (119896 + 1) minus 120579
111199101 (119896 + 1) minus 120579
121199102 (119896 + 1)
1198902 (119896 + 1) = 119909
2 (119896 + 1) minus 120579
211199101 (119896 + 1) minus 120579
221199102 (119896 + 1)
(17)
where (120579119894119895) isin R2times2 are scaling constants
Then the synchronization errors of IFSHPS betweensystems (15) and (16) can be derived as
1198901 (119896 + 1) = (119886
21minus 1198971) 1198901 (119896) minus (119886
22+ 211988612minus 1198972) 1198902 (119896)
+ 1198771minus
2
sum
119895=1
1205791119895119906119895
1198902 (119896 + 1) = (119886
11minus 1198971) 1198901 (119896) + (119886
12minus 1198972) 1198902 (119896) + 119877
2
minus
2
sum
119895=1
1205792119895119906119895
(18)
where (119897119894)1le119894le2
are control constants and
1198771=
2
sum
119895=1
1205821119895119910119895 (119896) + 119891
1minus 120579111198921minus 120579121198922
1198772=
2
sum
119895=1
1205822119895119910119895 (119896) + 119891
2minus 120579211198921minus 120579221198922
(19)
where12058211= 1198861112057911+ 1198861212057921
12058212= 1198861112057912+ 1198861212057922
12058221= 1198862112057911+ 1198862212057921
12058222= 1198862112057912+ 1198862212057922
(20)
To achieve IFSHPS between systems (15) and (16) weassume that
1205791112057922
= 1205791212057921 (21)
and we choose the synchronization controllers as
1199061=
120579221198771minus 120579121198772
1205791212057921minus 1205791112057922
1199062=
120579111198772minus 120579211198771
1205791212057921minus 1205791112057922
(22)
Theorem 4 If the control constants (119897119894)1le119894le2
are chosen suchthat
100381610038161003816100381611988611+ 11988621minus 1198971
1003816100381610038161003816lt
1
radic2
100381610038161003816100381611988622+ 11988612minus 1198972
1003816100381610038161003816lt
1
radic2
(23)
then the drive system (15) and the response (16) are globallyinverse full-state hybrid projective synchronized
Proof By substituting control law (22) into (18) the synchro-nization errors can be written as
1198901 (119896 + 1) = (119886
11+ 11988621minus 1198971) 1198901 (119896)
minus (11988612+ 11988622minus 1198972) 1198902 (119896)
1198902 (119896 + 1) = (119886
21+ 11988611minus 1198971) 1198901 (119896)
+ (11988622+ 11988612minus 1198972) 1198902 (119896)
(24)
4 Journal of Nonlinear Dynamics
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (25)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= (2(11988611+ 11988621minus 1198971)2minus 1) 119890
2
1(119896)
+ (2(11988622+ 11988612minus 1198972)2minus 1) 119890
2
1(119896)
+ 2 [(11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)
minus (11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)]
sdot 1198901 (119896) 1198902 (
119896)
(26)
By using (23) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (15) and(16) are globally inverse full-state hybrid projective synchro-nized
5 Numerical Application and Simulations
We consider the discrete-time Fold system system as thedrive system and the controlled Lorenz discrete-time asthe response system The discrete-time Fold system can bedescribed as
1199091 (119896 + 1) = 120572119909
1 (119896) + 119909
2 (119896)
1199092 (119896 + 1) = 119909
2
1(119896) + 120573
(27)
which has a chaotic attractor for example when (120572 120573) =
(minus01minus17) [13] The discrete-time Fold system is shown inFigure 1
The controlled Lorenz discrete-time system can bedescribed as
1199101 (119896 + 1) = (1 + 119886119887) 1199101 (
119896) minus 1198871199101 (119896) 1199102 (
119896) + 1199061
1199102 (119896 + 1) = (1 minus 119887) 1199102 (
119896) + 1198871199102
1(119896) + 119906
2
(28)
where 119880 = (1199061 1199062)119879 is the vector controller The Lorenz
discrete-time has a chaotic attractor for example when(119886 119887) = (125 075) [13] The chaotic attractor of the Lorenzdiscrete-time system is shown in Figure 2
1
05
0
minus05
minus1
minus15
151050minus05minus1minus15
y1
y2
Figure 1 Chaotic attractor of Fold discrete-time system when(120572 120573) = (minus01 minus17)
4
3
2
1
0
210minus1minus2
y1
y2
Figure 2 Chaotic attractor of Lorenz discrete-time system when(119886 119887) = (125 075)
51 FSHPS between the Discrete-Time Fold System and theControlled Lorenz Discrete-Time System Her according toour approach presented in Section 3 we obtain
(
11988711
11988712
11988721
11988722
) = (
1 + 119886119887 0
0 1 minus 119887)
1198901 (119896 + 1) = [2 + (119886 minus 1) 119887 minus 119897
1] 1198901 (119896) minus 11989721198902 (119896)
1198902 (119896 + 1) = minus119897
21198901 (119896) minus [2 + (119886 minus 1) 119887 minus 119897
1] 1198902 (119896)
(29)
Journal of Nonlinear Dynamics 5
5 10 15 20 25
0
02
04
06
minus08
minus06
minus04
minus02
e1
e2
Figure 3 Time evolution of FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
Corollary 5 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally full-statehybrid projective synchronized if the control constants arechosen such that
(218 minus 1198971)2+ 1198972
2lt 1 (30)
If we take (1198971 1198972) = (2 05) and by using Matlab we get
the numeric result that is shown in Figure 3
52 Inverse FSHPS between the Discrete-Time Fold System andthe Controlled Lorenz Discrete-Time System Now accordingto our approach presented in Section 4 we obtain
(
11988611
11988612
11988621
11988622
) = (
120572 1
0 0)
1198901 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) minus (1 minus 119897
2) 1198902 (119896)
1198902 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) + (1 minus 119897
2) 1198902 (119896)
(31)
Corollary 6 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally inverse full-state hybrid projective synchronized if the control constants arechosen such that
minus08 lt 1198971lt 06
03 lt 1198972lt 17
(32)
Finally if we take (1198971 1198972) = (05 1) and by using Matlab
we get the numeric result that is shown in Figure 4
6 Conclusion
In this paper to study FSHPS and IFSHPS between arbi-trary chaotic dynamical systems in 2D discrete-time a new
e1
e2
03
02
01
0
minus01
minus02
minus03
minus04
minus051110987654321
Figure 4 Time evolution of inverse FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
nonlinear control method was presented It was shownthat the proposed synchronization criterions were based onsimple and effective results Firstly FSHPS is achieved bycontrolling the linear part of the response system SecondlyIFSHPS is guaranteedwhen the linear part of the drive systemis controlled Finally numerical example and simulationsresults were utilized to illustrate the effectiveness of theproposed schemes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Liu Z M Wang and W D Zhang ldquoControlled synchro-nization of discrete-time chaotic systems under communicationconstraintsrdquo Nonlinear Dynamics vol 69 no 1-2 pp 223ndash2302012
[2] G Grassi ldquoArbitrary full-state hybrid projective synchroniza-tion for chaotic discrete-time systems via a scalar signalrdquoChinese Physics B vol 21 no 6 Article ID 060504 2012
[3] Z Yan ldquoQ-S synchronization in 3D Henon-like map andgeneralized Henon map via a scalar controllerrdquo Physics LettersA vol 342 no 4 pp 309ndash317 2005
[4] J G Lu and Y G Xi ldquoChaos communication based on synchro-nization of discrete-time chaotic systemsrdquo Chinese Physics vol14 no 2 pp 274ndash278 2005
[5] E Solak ldquoCryptanalysis of observer based discrete-time chaoticencryption schemesrdquo International Journal of Bifurcation andChaos inApplied Sciences andEngineering vol 15 no 2 pp 653ndash658 2005
[6] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Journal of Nonlinear Dynamics
Construct the candidate Lyapunov function in the form
119881 (119890 (119896)) = 1198902
1(119896) + 119890
2
2(119896) (25)
we get
Δ119881 (119890 (119896))
= 119881 (119890 (119896 + 1)) minus 119881 (119890 (119896))
=
2
sum
119894=1
1198902
119894(119896 + 1) minus
2
sum
119894=1
1198902
119894(119896)
= (2(11988611+ 11988621minus 1198971)2minus 1) 119890
2
1(119896)
+ (2(11988622+ 11988612minus 1198972)2minus 1) 119890
2
1(119896)
+ 2 [(11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)
minus (11988611+ 11988621minus 1198971) (11988622+ 11988612minus 1198972)]
sdot 1198901 (119896) 1198902 (
119896)
(26)
By using (23) we obtain Δ119881 (119890 (119896)) lt 0 Thus by Lya-punov stability theory it is immediate that lim
119896rarrinfin119890119894(119896) =
0 (119894 = 1 2) and we conclude that the two systems (15) and(16) are globally inverse full-state hybrid projective synchro-nized
5 Numerical Application and Simulations
We consider the discrete-time Fold system system as thedrive system and the controlled Lorenz discrete-time asthe response system The discrete-time Fold system can bedescribed as
1199091 (119896 + 1) = 120572119909
1 (119896) + 119909
2 (119896)
1199092 (119896 + 1) = 119909
2
1(119896) + 120573
(27)
which has a chaotic attractor for example when (120572 120573) =
(minus01minus17) [13] The discrete-time Fold system is shown inFigure 1
The controlled Lorenz discrete-time system can bedescribed as
1199101 (119896 + 1) = (1 + 119886119887) 1199101 (
119896) minus 1198871199101 (119896) 1199102 (
119896) + 1199061
1199102 (119896 + 1) = (1 minus 119887) 1199102 (
119896) + 1198871199102
1(119896) + 119906
2
(28)
where 119880 = (1199061 1199062)119879 is the vector controller The Lorenz
discrete-time has a chaotic attractor for example when(119886 119887) = (125 075) [13] The chaotic attractor of the Lorenzdiscrete-time system is shown in Figure 2
1
05
0
minus05
minus1
minus15
151050minus05minus1minus15
y1
y2
Figure 1 Chaotic attractor of Fold discrete-time system when(120572 120573) = (minus01 minus17)
4
3
2
1
0
210minus1minus2
y1
y2
Figure 2 Chaotic attractor of Lorenz discrete-time system when(119886 119887) = (125 075)
51 FSHPS between the Discrete-Time Fold System and theControlled Lorenz Discrete-Time System Her according toour approach presented in Section 3 we obtain
(
11988711
11988712
11988721
11988722
) = (
1 + 119886119887 0
0 1 minus 119887)
1198901 (119896 + 1) = [2 + (119886 minus 1) 119887 minus 119897
1] 1198901 (119896) minus 11989721198902 (119896)
1198902 (119896 + 1) = minus119897
21198901 (119896) minus [2 + (119886 minus 1) 119887 minus 119897
1] 1198902 (119896)
(29)
Journal of Nonlinear Dynamics 5
5 10 15 20 25
0
02
04
06
minus08
minus06
minus04
minus02
e1
e2
Figure 3 Time evolution of FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
Corollary 5 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally full-statehybrid projective synchronized if the control constants arechosen such that
(218 minus 1198971)2+ 1198972
2lt 1 (30)
If we take (1198971 1198972) = (2 05) and by using Matlab we get
the numeric result that is shown in Figure 3
52 Inverse FSHPS between the Discrete-Time Fold System andthe Controlled Lorenz Discrete-Time System Now accordingto our approach presented in Section 4 we obtain
(
11988611
11988612
11988621
11988622
) = (
120572 1
0 0)
1198901 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) minus (1 minus 119897
2) 1198902 (119896)
1198902 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) + (1 minus 119897
2) 1198902 (119896)
(31)
Corollary 6 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally inverse full-state hybrid projective synchronized if the control constants arechosen such that
minus08 lt 1198971lt 06
03 lt 1198972lt 17
(32)
Finally if we take (1198971 1198972) = (05 1) and by using Matlab
we get the numeric result that is shown in Figure 4
6 Conclusion
In this paper to study FSHPS and IFSHPS between arbi-trary chaotic dynamical systems in 2D discrete-time a new
e1
e2
03
02
01
0
minus01
minus02
minus03
minus04
minus051110987654321
Figure 4 Time evolution of inverse FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
nonlinear control method was presented It was shownthat the proposed synchronization criterions were based onsimple and effective results Firstly FSHPS is achieved bycontrolling the linear part of the response system SecondlyIFSHPS is guaranteedwhen the linear part of the drive systemis controlled Finally numerical example and simulationsresults were utilized to illustrate the effectiveness of theproposed schemes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Liu Z M Wang and W D Zhang ldquoControlled synchro-nization of discrete-time chaotic systems under communicationconstraintsrdquo Nonlinear Dynamics vol 69 no 1-2 pp 223ndash2302012
[2] G Grassi ldquoArbitrary full-state hybrid projective synchroniza-tion for chaotic discrete-time systems via a scalar signalrdquoChinese Physics B vol 21 no 6 Article ID 060504 2012
[3] Z Yan ldquoQ-S synchronization in 3D Henon-like map andgeneralized Henon map via a scalar controllerrdquo Physics LettersA vol 342 no 4 pp 309ndash317 2005
[4] J G Lu and Y G Xi ldquoChaos communication based on synchro-nization of discrete-time chaotic systemsrdquo Chinese Physics vol14 no 2 pp 274ndash278 2005
[5] E Solak ldquoCryptanalysis of observer based discrete-time chaoticencryption schemesrdquo International Journal of Bifurcation andChaos inApplied Sciences andEngineering vol 15 no 2 pp 653ndash658 2005
[6] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Journal of Nonlinear Dynamics 5
5 10 15 20 25
0
02
04
06
minus08
minus06
minus04
minus02
e1
e2
Figure 3 Time evolution of FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
Corollary 5 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally full-statehybrid projective synchronized if the control constants arechosen such that
(218 minus 1198971)2+ 1198972
2lt 1 (30)
If we take (1198971 1198972) = (2 05) and by using Matlab we get
the numeric result that is shown in Figure 3
52 Inverse FSHPS between the Discrete-Time Fold System andthe Controlled Lorenz Discrete-Time System Now accordingto our approach presented in Section 4 we obtain
(
11988611
11988612
11988621
11988622
) = (
120572 1
0 0)
1198901 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) minus (1 minus 119897
2) 1198902 (119896)
1198902 (119896 + 1) = (120572 minus 119897
1) 1198901 (119896) + (1 minus 119897
2) 1198902 (119896)
(31)
Corollary 6 The drive Fold discrete-time system and theresponse Lorenz discrete-time system are globally inverse full-state hybrid projective synchronized if the control constants arechosen such that
minus08 lt 1198971lt 06
03 lt 1198972lt 17
(32)
Finally if we take (1198971 1198972) = (05 1) and by using Matlab
we get the numeric result that is shown in Figure 4
6 Conclusion
In this paper to study FSHPS and IFSHPS between arbi-trary chaotic dynamical systems in 2D discrete-time a new
e1
e2
03
02
01
0
minus01
minus02
minus03
minus04
minus051110987654321
Figure 4 Time evolution of inverse FSHPS errors between the drivediscrete-time Fold system (27) and the controlled Lorenz discrete-time system (28)
nonlinear control method was presented It was shownthat the proposed synchronization criterions were based onsimple and effective results Firstly FSHPS is achieved bycontrolling the linear part of the response system SecondlyIFSHPS is guaranteedwhen the linear part of the drive systemis controlled Finally numerical example and simulationsresults were utilized to illustrate the effectiveness of theproposed schemes
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] W Liu Z M Wang and W D Zhang ldquoControlled synchro-nization of discrete-time chaotic systems under communicationconstraintsrdquo Nonlinear Dynamics vol 69 no 1-2 pp 223ndash2302012
[2] G Grassi ldquoArbitrary full-state hybrid projective synchroniza-tion for chaotic discrete-time systems via a scalar signalrdquoChinese Physics B vol 21 no 6 Article ID 060504 2012
[3] Z Yan ldquoQ-S synchronization in 3D Henon-like map andgeneralized Henon map via a scalar controllerrdquo Physics LettersA vol 342 no 4 pp 309ndash317 2005
[4] J G Lu and Y G Xi ldquoChaos communication based on synchro-nization of discrete-time chaotic systemsrdquo Chinese Physics vol14 no 2 pp 274ndash278 2005
[5] E Solak ldquoCryptanalysis of observer based discrete-time chaoticencryption schemesrdquo International Journal of Bifurcation andChaos inApplied Sciences andEngineering vol 15 no 2 pp 653ndash658 2005
[6] L M Pecora and T L Carroll ldquoSynchronization in chaoticsystemsrdquo Physical Review Letters vol 64 no 8 pp 821ndash8241990
6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Journal of Nonlinear Dynamics
[7] W Xiao-Qun and L Jun-An ldquoParameter identification andbackstepping control of uncertain Lu systemrdquo Chaos Solitonsand Fractals vol 18 no 4 pp 721ndash729 2003
[8] C-C Yang andC-L Lin ldquoRobust adaptive slidingmode controlfor synchronization of space-clamped FitzHugh-Nagumo neu-ronsrdquo Nonlinear Dynamics vol 69 no 4 pp 2089ndash2096 2012
[9] T Banerjee D Biswas and B C Sarkar ldquoComplete andgeneralized synchronization of chaos and hyperchaos in acoupled first-order time-delayed systemrdquo Nonlinear Dynamicsvol 71 no 1-2 pp 279ndash290 2013
[10] MMAl-Sawalha andM SMNoorani ldquoAnti-synchronizationbetween two different hyperchaotic systemsrdquo Journal of Uncer-tain Systems vol 3 no 3 pp 192ndash200 2009
[11] A Khan and R P Prasad ldquoProjective synchronization ofdifferent hyper-chaotic systems by active nonlinear controlrdquoJournal of Uncertain Systems vol 8 no 2 pp 90ndash100 2014
[12] M Hu Z Xu and R Zhang ldquoFull state hybrid projectivesynchronization in continuous-time chaotic (hyperchaotic)systemsrdquo Communications in Nonlinear Science and NumericalSimulation vol 13 no 2 pp 456ndash464 2008
[13] Z Yan ldquoQ-S (complete or anticipated) synchronization back-stepping scheme in a class of discrete-time chaotic (hyper-chaotic) systems a symbolic-numeric computation approachrdquoChaos vol 16 no 1 Article ID 013119 11 pages 2006
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of