Embed Size (px)
Citation preview

Research ArticleNumerical Analysis and Demonstration Transmission ShaftInfluence on Meshing Vibration in Driving and Driven Gears
Xu Jinli Su Xingyi and Peng Bo
Wuhan University of Technology Wuhan 430070 China
Correspondence should be addressed to Su Xingyi sxy19900314126com
Received 23 November 2014 Accepted 3 April 2015
Academic Editor Wen Long Li
Copyright copy 2015 Xu Jinli et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The variable axial transmission system composed of universal joint transmission shafts and a gear pair has been applied in manyengineering fields In the design of a drive system the dynamics of the gear pair have been studied in detail However few havepaid attention to the effect on the systemmodal characteristics of the gear pair arising from the universal joint transmission shaftsThis work establishes a torsional vibration mathematical model of the transmission shaft driving gear and driven gear based onlumped masses and the main reducer system assembly of a CDV (car-based delivery vehicle) car The model is solved by the statespace methodThe influence of the angle between transmission shafts and intermediate support stiffness on the vibration and noiseof the main reducer is obtained and verified experimentally A reference for the main reducer and transmission shaft design andthe allied parameter matching are provided
1 Introduction
In the 1970s to meet customer demand the crossover wasmodified from cars in Europe and the United States Itstemmed from SUVs gradually developed into an arbitrarycombination of car SUV MPV and pick-up It set the com-fort fashion and appearance standards for such cars it hadthe control of an SUV and the capacity of an MPV internallyCrossovers are divided into SAV CDV vans and othermodels In recent years the production and sales of crossovershave developed rapidly in China The technology has alsobeen greatly improved through absorption and digestionHowever the coupling technology between the transmissionshafts on the chassis and gears in the main reducer hasbeen a hot research topic for the industry There remainsthe effect on car NVH due to their coupling Qualitativeresearch into the influence of transmission shaft angle andintermediate support stiffness on meshing vibration of gearsremains sparse
A CDV car produced in China suffers from excessiveinternal noise (60 db) The performance of an NVH doesnot meet the level required of a passenger vehicle The mainreason for this is shock and vibration from its transmissionsystem [1 2] The transmission system of that car can be
described as a ldquouniversal jointmdashtransmission shaftmdashgearmeshing systemrdquo (known as a variable axial transmissionsystem) This kind of flexible transmission system can meetthe requirements of torque output floating [3 4] There is noaccurate quantitative analysis on angle between the transmis-sion shafts according to the CDV car In the situation of free-dom (car suspension) the initial installation angle changesfrom 0∘ to 10∘ Without considering influence of car weightand load on the initial installation angle angle between thetransmission shafts changes during driving while few studieshave been involved in quantitative analysis on intermediatesupport stiffnessThe stiffness value (600Nmmsim700Nmm)is determined by analogy and experience analysis especiallythe mutual coupling effect of installation angle betweentransmission shafts and intermediate support stiffness onvibration of driving and driven gear is less involved currently
This work focuses on the drive shaftmdashrear axle mainreducer and gear [5 6] system of the vehicle creates atorsional vibration model and solves its equations by thelumped mass method Influences of transmission shaft angleand intermediate support stiffness on the meshing vibrationof both driving and driven gears are studied [7 8] andthe installation angle and intermediate support stiffness are
Hindawi Publishing CorporationShock and VibrationVolume 2015 Article ID 365084 10 pageshttpdxdoiorg1011552015365084
2 Shock and Vibration
43
1 2
The outputshaft of
transmission
Universaljoint
The first transmission
shaft
Intermediatesupport The second
transmission shaft Main reducer
1205961
1205791M1
1205962
1205792M2
1205963
12059641205793
1205794
M3
M4
1205722
1205721
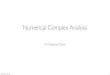
Figure 1 Universal transmission device structure investigated
1 2
3 4
The inputshaft
1205791M1 1205792 1205796M21205793M3
M6
1205795M5
1205794M4
K3
K2
K1 K0
Je1
J998400e2
Je3
Je2
Figure 2 Torsional vibration analysis model of the transmission shaft driving gear and driven gear system
quantified Vibration and shock from the variable axialtransmission system are reduced thereby improving thevehiclersquos performance This study provides useful referencefor the design of automobile chassis
2 The lsquolsquoTransmission ShaftmdashDriving Gearand Driven Gearrsquorsquo Mathematical Model
The key factors affecting vibration and noise in the mainreducer are the driving gear and driven gearrsquos meshing move-ment [9 10] It is also one of the factors influencing vehicleNVH As an elastic mechanical system both the driving gearand driven gear will have vibration responses to dynamicexcitation during transmission time The dynamic excitationof the driving and driven gears mainly includes transmissionshaft input excitation and road load excitation [11] As a resultwhen researching the problem of vibration and noise causedby the meshing of the driving gear and driven gear it isimportant to determine the main characteristics of both oftheir excitations
21 Establishing a Torsional Vibration Model ldquoTransmissionShaftmdashDriving Gear and Driven Gearrdquo The ldquotransmissionshaftmdashdriving gear and driven gearrdquo system is analyzeddynamically The complex mechanical system is simplifiedby the lumped mass method The torsional vibration math-ematical analysis model for this elastic mechanical systemis established by Lagrangersquos equation because the systemcomponents are both numerous and complex in structure
the form of movement is not only translational but alsorotational It is necessary to calculate only after simplificationIn the torsional vibration model all components connectedwith the rotating shaft are treated as absolutely rigid bodieswith amoment of inertiaThe shaft sectionmoment of inertiaequivalent is transferred to the two ends of the shaftThe rigidbodies after equivalent treatment are connected by a seriesof equivalent bodies with elasticity and nomoment of inertiathus an equivalent analysis model of the vehiclersquos variableaxial transmission system is established The structure of thevehicle transmission shaft and the main reducer investigatedhere is shown in Figure 1
The torsional vibration mathematical model of the trans-mission shaft driving gear and driven gear system isestablished by considering the transmission system torsionalvibrations a simplified model is shown in Figure 2
The transmission shaft comprises three cross-shaft uni-versal joints Suppose that there is a model with a node ineach universal joint (nodes 1 2 and 3) Torque transferredfrom the engine by the gearbox acts on node 1 The twosection transmission shafts are simplified as torsional springsand mass points The intermediate support is simplifiedas a torsional spring of stiffness 119870
0 The output end of
the second transmission shaft is connected to the drivinggear because the driving gear shaft stiffness is large theinfluence of the driving gear shaft on torsional vibration ofthe system is ignored Load torque is simplified and appliedto the main reducerrsquos driven gear According to Lagrangersquosequation and Newtonrsquos second law the corner is selectedas the origin the generalised coordinates are expressed as
Shock and Vibration 3
119902 = (120579
1 120579
2 120579
3 120579
4 120579
5 120579
6) The systemrsquos torsional vibration
model is
119869
1198901
120579
1minus 119870
1(120579
2minus 120579
1) minus 119862
1(
120579
2minus
120579
1) = 119872
1
119869
1198902
120579
2+ 119870
1(120579
2minus 120579
1) + 119862
1(
120579
2minus
120579
1) = minus119872
2
119869
1015840
1198902
120579
3minus 119870
2(120579
4minus 120579
3) minus 119862
2(
120579
4minus
120579
3) = 119872
3
119869
1198903
120579
4+ 119870
2(120579
4minus 120579
3) + 119862
2(
120579
4minus
120579
3) = minus119872
4
119869driving
120579
5+ 119879
119899= 119872
5
119869driven
120579
6minus 119879
119899= minus119872
6
(1)
where 1198691198901is the equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint 1198701is the
series equivalent stiffness of the first transmission shaft tubeand its intermediate support 119862
1is the damping coefficient
of the first transmission shaft 1198691198902
is the equivalent polarmoment of inertia of the first transmission shaft at node2 of the universal joint is the equivalent polar moment ofinertia of the second transmission shaft at node 2 of theuniversal joint 119870
2is the series equivalent stiffness of the
second transmission shaft tube and its intermediate support119862
2is the damping coefficient of the second transmission
shaft 1198691198903
is the equivalent polar moment of inertia of thesecond transmission shaft at node 3 of the universal joint119869driving is the equivalent polar moment of inertia of the mainreducer driving gear 119869driven is the equivalent polar momentof inertia of the main reducer driven gear 119879
119899is the dynamic
meshing force of the driving gear and driven gear11987211198726are
the engine output torque and the equivalent torque loadingon the driven gear
Equation (1) is transferred to the torsional vibrationequation of the system in matrix form
119869
119890 sdot 119902 + 119862
119890 119902 + 119870
119890 119902 = 119872 (119905) (2)
where 119869119890 is the equivalent polar inertiamatrix of the system
119862
119890 is the equivalent damping matrix 119870
119890 is the equivalent
stiffness matrix and 119872(119905) is the torque vector matrix of thesystemThe dynamic meshing force between the driving gearand the driven gear is as follows [12 13]
119879
119899= 119870
119898sdot (120579
5minus 120579
6) + 119862
119898sdot (
120579
5minus
120579
6) (3)
where119870119898119862119898are the averagemeshing stiffness of reverse and
average meshing damping between gearsWhen the power transmission shaft is stable the rotation
angle between transmission shaft axes [14] (Figures 1 and 2)is
tan 1205792= tan 120579
3sdot cos120572
1
tan 1205794= tan 120579
3sdot cos120572
2
120596
3=
cos1205721
1 minus sin21205721sdot cos2120579
2
120596
2
120596
4=
cos1205722
1 + sin21205793sdot (cos2120572
2minus 1)
120596
3
(4)
The relationship between the different transmission shafttorques is as follows
119872
119894120596
119894= 119872
119897120596
119897 (5)
Uniting (1) to (5) allows the torsional vibration analysismodel to be numerically solved
22 Numerical Solution of the System Torsional VibrationModel To obtain the numerical solution (2) is solved by acombination of state spacemethod andRunge-KuttamethodThe state space method is analytical and is a comprehensivemethod for the dynamic characteristics of the system inmodern control theory The analysis process sets state spacevariables which can identify and characterise the systemThen the dynamic characteristics of the system are identifiedby the first-order differential equations composed of the statespace variables The transfer function between system inputand output can be obtained by the state space equation Ifthe input is known then the value of the state variablescan determine the changing characteristics of the outputcompletely
Set the output variable of system
119884
1= 119885
2
119884
2= 119885
4
119884
3= 119885
6
119884
4= 119885
8
119884
5= 119885
10
119884
6= 119885
12
(6)
Select the state space variables
119885
1= 120579
1
119885
2=
120579
1
119885
3= 120579
2
119885
4=
120579
2
119885
5= 120579
3
119885
6=
120579
3
119885
7= 120579
4
119885
8=
120579
4
119885
9= 120579
5
119885
10=
120579
5
119885
11= 120579
6
119885
12=
120579
6
(7)
Equation (2) is transformed into the state space expres-sion [15]
4 Shock and Vibration
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
120579
1
120579
1
120579
2
120579
2
120579
3
120579
3
120579
4
120579
4
120579
5
120579
5
120579
6
120579
6
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
minus119896
1
119869
1198901
minus119888
1
119869
1198901
119896
1
119869
1198901
119888
1
119869
1198901
0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
119896
1
119869
1198902
119888
1
119869
1198902
minus119896
1
119869
1198902
minus119888
1
119869
1198902
0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0
minus119896
2
119869
1015840
1198902
minus119888
2
119869
1015840
1198902
119896
2
119869
1015840
1198902
119888
2
119869
1015840
1198902
0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0
119896
2
119869
1198903
119888
2
119869
1198903
minus119896
2
119869
1198903
minus119888
2
119869
1198903
0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0
minus119896
119898
119869driving
minus119888
119898
119869driving
119896
119898
119869driving
119888
119898
119869driving0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
119896
119898
119869driven
119888
119898
119869driven
minus119896
119898
119869driven
minus119888
119898
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
+
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 0 0 0 0 0
1
119869
1198901
0 0 0 0 0
0 0 0 0 0 0
0 minus
1
119869
1198902
0 0 0 0
0 0 0 0 0 0
0 0
1
119869
1015840
1198902
0 0 0
0 0 0 0 0 0
0 0 0 minus
1
119869
1198903
0 0
0 0 0 0 0 0
0 0 0 0
1
119869driving0
0 0 0 0 0 0
0 0 0 0 0 minus
1
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
119872
1
119872
2
119872
3
119872
4
119872
5
119872
6
]
]
]
]
]
]
]
]
]
]
(8)
Shock and Vibration 5
At the same time the state space expression for thetorsional mathematical analysis model output variable isobtained
[
[
[
[
[
[
[
[
[
[
[
[
119884
1
119884
2
119884
3
119884
4
119884
5
119884
6
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
119885
2
119885
4
119885
6
119885
8
119885
10
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(9)
The parameters of the mathematical model are substi-tuted into the state space expression The torsional vibrationresponse of the system can then be obtained by Runge-Kuttamethod
3 Determining Parameters in the Model
31 Determining Coefficients in the Model The transmissionshaftrsquos main parameters for the car researched here are listedin Table 1 The main parameters of both driving and drivengears are listed in Table 2
The torsional stiffness of the transmission shaft is
119870
1015840
119894
=
119866119868
119875
119871
N sdotmrad (10)
119866 is the shear modulus 794times1010Nsdotmminus2 and 119871 is the lengthof the shaft
The transmission shaft of the car is modelled as a thin-walled circular cross-section
119868
119901asymp 2120587119889
3
(119863 minus 119889) = 486 times 10
minus6m4 (11)
The intermediate support and transmission shaft totalequivalent torsional stiffness values are as follows [16]
1
119870
119894
=
1
119870
119874
+
1
119870
1015840
119894
(12)
There are many calculation methods available for the lin-ear meshing stiffness of gears as far as accuracy is concerned
a single gear toothrsquos linear meshing stiffness is calculated bythe ISO method Results that have little difference to theactual meshing stiffness may be obtained by this methodThehypoid gears of Gleason are adopted in the main reducer ofthe vehicle with a gear meshing stiffness with a linear value[17]
119896
119898119887= 184 times 10
6Nm (13)
The value of the gearrsquos equivalent meshing damping is
119862
119898= 2120585radic119896
119898119887(
1
119898
1
+
1
119898
2
)N sdot sm (14)
119898
11198982are the driven and driving gearrsquos qualities and 120585 is the
damping ratio with a value of 01 hereThe average torsional stiffness of the gear is as follows
119870
119898=
119870
119898119887(119903
2
1198871
+ 119903
2
1198872
)
2119903
2
1198871
119903
2
1198872
= 234 times 10
3N sdotmrad (15)
where 1199031198871is the pitch circle radius of the driven gear and 119903
1198872
is the pitch circle radius of the driving gearThe equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint is
119869
1198901= 05 sdot (119869
1199041199111198901+ 119869
1198881198891198901) + 119869
1199111198881198901 (16)
119869
1199041199111198901is the first universal joint cross-shaftrsquos equivalent polar
moment of inertia about the first transmission axis 1198691198881198891198901
is the first transmission shaftrsquos equivalent polar moment ofinertia about its geometric centre 119869
1199111198881198901is the first joint shaft
forkrsquos equivalent polar moment of inertia about the firsttransmission axis
The 3d model of transmission shaft and main reducer isimported into UG software Values of 119869
1199041199111198901 1198691198881198891198901
and 1198691199111198881198901
arecalculated by UG the values are listed in Table 3
According to (16) 1198691198901= 0309234412 kgsdotm2 As the same
119869
1198902= 119869
1198901= 0309234412 kgsdotm2
Using the same method the cross-shaft and shaft forkrsquosmoments of inertia can be calculated these act from thesecond universal joint and their values are listed in Table 4
119869
1015840
1198902
= 18665142935 kgsdotm2 11986910158401198903
= 2324507441 kgsdotm2119869driving = 1236925720 kgsdotm2 and 119869driven =
0027998012 kgsdotm2The parameters for (1) can be found in Table 5
32 Determination of Car Main Reducer External ExcitationHere considering fluctuations in main reducer input torqueand load torque the input torque and load torque are set asfollows [18]
119872
1(119905) = 119872
1+ 120590 cos120596
119896119905
119872
6(119905) = 119872
6+ 120590 cos120596
119896119905
(17)
where1198721is the input torque from the engine119872
6is the load
torque 120590 is the coefficient of torque fluctuation (its value is01) and 120596
119896is the angular velocity of the transmission axis
6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 Shock and Vibration
43
1 2
The outputshaft of
transmission
Universaljoint
The first transmission
shaft
Intermediatesupport The second
transmission shaft Main reducer
1205961
1205791M1
1205962
1205792M2
1205963
12059641205793
1205794
M3
M4
1205722
1205721
Figure 1 Universal transmission device structure investigated
1 2
3 4
The inputshaft
1205791M1 1205792 1205796M21205793M3
M6
1205795M5
1205794M4
K3
K2
K1 K0
Je1
J998400e2
Je3
Je2
Figure 2 Torsional vibration analysis model of the transmission shaft driving gear and driven gear system
quantified Vibration and shock from the variable axialtransmission system are reduced thereby improving thevehiclersquos performance This study provides useful referencefor the design of automobile chassis
2 The lsquolsquoTransmission ShaftmdashDriving Gearand Driven Gearrsquorsquo Mathematical Model
The key factors affecting vibration and noise in the mainreducer are the driving gear and driven gearrsquos meshing move-ment [9 10] It is also one of the factors influencing vehicleNVH As an elastic mechanical system both the driving gearand driven gear will have vibration responses to dynamicexcitation during transmission time The dynamic excitationof the driving and driven gears mainly includes transmissionshaft input excitation and road load excitation [11] As a resultwhen researching the problem of vibration and noise causedby the meshing of the driving gear and driven gear it isimportant to determine the main characteristics of both oftheir excitations
21 Establishing a Torsional Vibration Model ldquoTransmissionShaftmdashDriving Gear and Driven Gearrdquo The ldquotransmissionshaftmdashdriving gear and driven gearrdquo system is analyzeddynamically The complex mechanical system is simplifiedby the lumped mass method The torsional vibration math-ematical analysis model for this elastic mechanical systemis established by Lagrangersquos equation because the systemcomponents are both numerous and complex in structure
the form of movement is not only translational but alsorotational It is necessary to calculate only after simplificationIn the torsional vibration model all components connectedwith the rotating shaft are treated as absolutely rigid bodieswith amoment of inertiaThe shaft sectionmoment of inertiaequivalent is transferred to the two ends of the shaftThe rigidbodies after equivalent treatment are connected by a seriesof equivalent bodies with elasticity and nomoment of inertiathus an equivalent analysis model of the vehiclersquos variableaxial transmission system is established The structure of thevehicle transmission shaft and the main reducer investigatedhere is shown in Figure 1
The torsional vibration mathematical model of the trans-mission shaft driving gear and driven gear system isestablished by considering the transmission system torsionalvibrations a simplified model is shown in Figure 2
The transmission shaft comprises three cross-shaft uni-versal joints Suppose that there is a model with a node ineach universal joint (nodes 1 2 and 3) Torque transferredfrom the engine by the gearbox acts on node 1 The twosection transmission shafts are simplified as torsional springsand mass points The intermediate support is simplifiedas a torsional spring of stiffness 119870
0 The output end of
the second transmission shaft is connected to the drivinggear because the driving gear shaft stiffness is large theinfluence of the driving gear shaft on torsional vibration ofthe system is ignored Load torque is simplified and appliedto the main reducerrsquos driven gear According to Lagrangersquosequation and Newtonrsquos second law the corner is selectedas the origin the generalised coordinates are expressed as
Shock and Vibration 3
119902 = (120579
1 120579
2 120579
3 120579
4 120579
5 120579
6) The systemrsquos torsional vibration
model is
119869
1198901
120579
1minus 119870
1(120579
2minus 120579
1) minus 119862
1(
120579
2minus
120579
1) = 119872
1
119869
1198902
120579
2+ 119870
1(120579
2minus 120579
1) + 119862
1(
120579
2minus
120579
1) = minus119872
2
119869
1015840
1198902
120579
3minus 119870
2(120579
4minus 120579
3) minus 119862
2(
120579
4minus
120579
3) = 119872
3
119869
1198903
120579
4+ 119870
2(120579
4minus 120579
3) + 119862
2(
120579
4minus
120579
3) = minus119872
4
119869driving
120579
5+ 119879
119899= 119872
5
119869driven
120579
6minus 119879
119899= minus119872
6
(1)
where 1198691198901is the equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint 1198701is the
series equivalent stiffness of the first transmission shaft tubeand its intermediate support 119862
1is the damping coefficient
of the first transmission shaft 1198691198902
is the equivalent polarmoment of inertia of the first transmission shaft at node2 of the universal joint is the equivalent polar moment ofinertia of the second transmission shaft at node 2 of theuniversal joint 119870
2is the series equivalent stiffness of the
second transmission shaft tube and its intermediate support119862
2is the damping coefficient of the second transmission
shaft 1198691198903
is the equivalent polar moment of inertia of thesecond transmission shaft at node 3 of the universal joint119869driving is the equivalent polar moment of inertia of the mainreducer driving gear 119869driven is the equivalent polar momentof inertia of the main reducer driven gear 119879
119899is the dynamic
meshing force of the driving gear and driven gear11987211198726are
the engine output torque and the equivalent torque loadingon the driven gear
Equation (1) is transferred to the torsional vibrationequation of the system in matrix form
119869
119890 sdot 119902 + 119862
119890 119902 + 119870
119890 119902 = 119872 (119905) (2)
where 119869119890 is the equivalent polar inertiamatrix of the system
119862
119890 is the equivalent damping matrix 119870
119890 is the equivalent
stiffness matrix and 119872(119905) is the torque vector matrix of thesystemThe dynamic meshing force between the driving gearand the driven gear is as follows [12 13]
119879
119899= 119870
119898sdot (120579
5minus 120579
6) + 119862
119898sdot (
120579
5minus
120579
6) (3)
where119870119898119862119898are the averagemeshing stiffness of reverse and
average meshing damping between gearsWhen the power transmission shaft is stable the rotation
angle between transmission shaft axes [14] (Figures 1 and 2)is
tan 1205792= tan 120579
3sdot cos120572
1
tan 1205794= tan 120579
3sdot cos120572
2
120596
3=
cos1205721
1 minus sin21205721sdot cos2120579
2
120596
2
120596
4=
cos1205722
1 + sin21205793sdot (cos2120572
2minus 1)
120596
3
(4)
The relationship between the different transmission shafttorques is as follows
119872
119894120596
119894= 119872
119897120596
119897 (5)
Uniting (1) to (5) allows the torsional vibration analysismodel to be numerically solved
22 Numerical Solution of the System Torsional VibrationModel To obtain the numerical solution (2) is solved by acombination of state spacemethod andRunge-KuttamethodThe state space method is analytical and is a comprehensivemethod for the dynamic characteristics of the system inmodern control theory The analysis process sets state spacevariables which can identify and characterise the systemThen the dynamic characteristics of the system are identifiedby the first-order differential equations composed of the statespace variables The transfer function between system inputand output can be obtained by the state space equation Ifthe input is known then the value of the state variablescan determine the changing characteristics of the outputcompletely
Set the output variable of system
119884
1= 119885
2
119884
2= 119885
4
119884
3= 119885
6
119884
4= 119885
8
119884
5= 119885
10
119884
6= 119885
12
(6)
Select the state space variables
119885
1= 120579
1
119885
2=
120579
1
119885
3= 120579
2
119885
4=
120579
2
119885
5= 120579
3
119885
6=
120579
3
119885
7= 120579
4
119885
8=
120579
4
119885
9= 120579
5
119885
10=
120579
5
119885
11= 120579
6
119885
12=
120579
6
(7)
Equation (2) is transformed into the state space expres-sion [15]
4 Shock and Vibration
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
120579
1
120579
1
120579
2
120579
2
120579
3
120579
3
120579
4
120579
4
120579
5
120579
5
120579
6
120579
6
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
minus119896
1
119869
1198901
minus119888
1
119869
1198901
119896
1
119869
1198901
119888
1
119869
1198901
0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
119896
1
119869
1198902
119888
1
119869
1198902
minus119896
1
119869
1198902
minus119888
1
119869
1198902
0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0
minus119896
2
119869
1015840
1198902
minus119888
2
119869
1015840
1198902
119896
2
119869
1015840
1198902
119888
2
119869
1015840
1198902
0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0
119896
2
119869
1198903
119888
2
119869
1198903
minus119896
2
119869
1198903
minus119888
2
119869
1198903
0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0
minus119896
119898
119869driving
minus119888
119898
119869driving
119896
119898
119869driving
119888
119898
119869driving0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
119896
119898
119869driven
119888
119898
119869driven
minus119896
119898
119869driven
minus119888
119898
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
+
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 0 0 0 0 0
1
119869
1198901
0 0 0 0 0
0 0 0 0 0 0
0 minus
1
119869
1198902
0 0 0 0
0 0 0 0 0 0
0 0
1
119869
1015840
1198902
0 0 0
0 0 0 0 0 0
0 0 0 minus
1
119869
1198903
0 0
0 0 0 0 0 0
0 0 0 0
1
119869driving0
0 0 0 0 0 0
0 0 0 0 0 minus
1
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
119872
1
119872
2
119872
3
119872
4
119872
5
119872
6
]
]
]
]
]
]
]
]
]
]
(8)
Shock and Vibration 5
At the same time the state space expression for thetorsional mathematical analysis model output variable isobtained
[
[
[
[
[
[
[
[
[
[
[
[
119884
1
119884
2
119884
3
119884
4
119884
5
119884
6
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
119885
2
119885
4
119885
6
119885
8
119885
10
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(9)
The parameters of the mathematical model are substi-tuted into the state space expression The torsional vibrationresponse of the system can then be obtained by Runge-Kuttamethod
3 Determining Parameters in the Model
31 Determining Coefficients in the Model The transmissionshaftrsquos main parameters for the car researched here are listedin Table 1 The main parameters of both driving and drivengears are listed in Table 2
The torsional stiffness of the transmission shaft is
119870
1015840
119894
=
119866119868
119875
119871
N sdotmrad (10)
119866 is the shear modulus 794times1010Nsdotmminus2 and 119871 is the lengthof the shaft
The transmission shaft of the car is modelled as a thin-walled circular cross-section
119868
119901asymp 2120587119889
3
(119863 minus 119889) = 486 times 10
minus6m4 (11)
The intermediate support and transmission shaft totalequivalent torsional stiffness values are as follows [16]
1
119870
119894
=
1
119870
119874
+
1
119870
1015840
119894
(12)
There are many calculation methods available for the lin-ear meshing stiffness of gears as far as accuracy is concerned
a single gear toothrsquos linear meshing stiffness is calculated bythe ISO method Results that have little difference to theactual meshing stiffness may be obtained by this methodThehypoid gears of Gleason are adopted in the main reducer ofthe vehicle with a gear meshing stiffness with a linear value[17]
119896
119898119887= 184 times 10
6Nm (13)
The value of the gearrsquos equivalent meshing damping is
119862
119898= 2120585radic119896
119898119887(
1
119898
1
+
1
119898
2
)N sdot sm (14)
119898
11198982are the driven and driving gearrsquos qualities and 120585 is the
damping ratio with a value of 01 hereThe average torsional stiffness of the gear is as follows
119870
119898=
119870
119898119887(119903
2
1198871
+ 119903
2
1198872
)
2119903
2
1198871
119903
2
1198872
= 234 times 10
3N sdotmrad (15)
where 1199031198871is the pitch circle radius of the driven gear and 119903
1198872
is the pitch circle radius of the driving gearThe equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint is
119869
1198901= 05 sdot (119869
1199041199111198901+ 119869
1198881198891198901) + 119869
1199111198881198901 (16)
119869
1199041199111198901is the first universal joint cross-shaftrsquos equivalent polar
moment of inertia about the first transmission axis 1198691198881198891198901
is the first transmission shaftrsquos equivalent polar moment ofinertia about its geometric centre 119869
1199111198881198901is the first joint shaft
forkrsquos equivalent polar moment of inertia about the firsttransmission axis
The 3d model of transmission shaft and main reducer isimported into UG software Values of 119869
1199041199111198901 1198691198881198891198901
and 1198691199111198881198901
arecalculated by UG the values are listed in Table 3
According to (16) 1198691198901= 0309234412 kgsdotm2 As the same
119869
1198902= 119869
1198901= 0309234412 kgsdotm2
Using the same method the cross-shaft and shaft forkrsquosmoments of inertia can be calculated these act from thesecond universal joint and their values are listed in Table 4
119869
1015840
1198902
= 18665142935 kgsdotm2 11986910158401198903
= 2324507441 kgsdotm2119869driving = 1236925720 kgsdotm2 and 119869driven =
0027998012 kgsdotm2The parameters for (1) can be found in Table 5
32 Determination of Car Main Reducer External ExcitationHere considering fluctuations in main reducer input torqueand load torque the input torque and load torque are set asfollows [18]
119872
1(119905) = 119872
1+ 120590 cos120596
119896119905
119872
6(119905) = 119872
6+ 120590 cos120596
119896119905
(17)
where1198721is the input torque from the engine119872
6is the load
torque 120590 is the coefficient of torque fluctuation (its value is01) and 120596
119896is the angular velocity of the transmission axis
6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
119902 = (120579
1 120579
2 120579
3 120579
4 120579
5 120579
6) The systemrsquos torsional vibration
model is
119869
1198901
120579
1minus 119870
1(120579
2minus 120579
1) minus 119862
1(
120579
2minus
120579
1) = 119872
1
119869
1198902
120579
2+ 119870
1(120579
2minus 120579
1) + 119862
1(
120579
2minus
120579
1) = minus119872
2
119869
1015840
1198902
120579
3minus 119870
2(120579
4minus 120579
3) minus 119862
2(
120579
4minus
120579
3) = 119872
3
119869
1198903
120579
4+ 119870
2(120579
4minus 120579
3) + 119862
2(
120579
4minus
120579
3) = minus119872
4
119869driving
120579
5+ 119879
119899= 119872
5
119869driven
120579
6minus 119879
119899= minus119872
6
(1)
where 1198691198901is the equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint 1198701is the
series equivalent stiffness of the first transmission shaft tubeand its intermediate support 119862
1is the damping coefficient
of the first transmission shaft 1198691198902
is the equivalent polarmoment of inertia of the first transmission shaft at node2 of the universal joint is the equivalent polar moment ofinertia of the second transmission shaft at node 2 of theuniversal joint 119870
2is the series equivalent stiffness of the
second transmission shaft tube and its intermediate support119862
2is the damping coefficient of the second transmission
shaft 1198691198903
is the equivalent polar moment of inertia of thesecond transmission shaft at node 3 of the universal joint119869driving is the equivalent polar moment of inertia of the mainreducer driving gear 119869driven is the equivalent polar momentof inertia of the main reducer driven gear 119879
119899is the dynamic
meshing force of the driving gear and driven gear11987211198726are
the engine output torque and the equivalent torque loadingon the driven gear
Equation (1) is transferred to the torsional vibrationequation of the system in matrix form
119869
119890 sdot 119902 + 119862
119890 119902 + 119870
119890 119902 = 119872 (119905) (2)
where 119869119890 is the equivalent polar inertiamatrix of the system
119862
119890 is the equivalent damping matrix 119870
119890 is the equivalent
stiffness matrix and 119872(119905) is the torque vector matrix of thesystemThe dynamic meshing force between the driving gearand the driven gear is as follows [12 13]
119879
119899= 119870
119898sdot (120579
5minus 120579
6) + 119862
119898sdot (
120579
5minus
120579
6) (3)
where119870119898119862119898are the averagemeshing stiffness of reverse and
average meshing damping between gearsWhen the power transmission shaft is stable the rotation
angle between transmission shaft axes [14] (Figures 1 and 2)is
tan 1205792= tan 120579
3sdot cos120572
1
tan 1205794= tan 120579
3sdot cos120572
2
120596
3=
cos1205721
1 minus sin21205721sdot cos2120579
2
120596
2
120596
4=
cos1205722
1 + sin21205793sdot (cos2120572
2minus 1)
120596
3
(4)
The relationship between the different transmission shafttorques is as follows
119872
119894120596
119894= 119872
119897120596
119897 (5)
Uniting (1) to (5) allows the torsional vibration analysismodel to be numerically solved
22 Numerical Solution of the System Torsional VibrationModel To obtain the numerical solution (2) is solved by acombination of state spacemethod andRunge-KuttamethodThe state space method is analytical and is a comprehensivemethod for the dynamic characteristics of the system inmodern control theory The analysis process sets state spacevariables which can identify and characterise the systemThen the dynamic characteristics of the system are identifiedby the first-order differential equations composed of the statespace variables The transfer function between system inputand output can be obtained by the state space equation Ifthe input is known then the value of the state variablescan determine the changing characteristics of the outputcompletely
Set the output variable of system
119884
1= 119885
2
119884
2= 119885
4
119884
3= 119885
6
119884
4= 119885
8
119884
5= 119885
10
119884
6= 119885
12
(6)
Select the state space variables
119885
1= 120579
1
119885
2=
120579
1
119885
3= 120579
2
119885
4=
120579
2
119885
5= 120579
3
119885
6=
120579
3
119885
7= 120579
4
119885
8=
120579
4
119885
9= 120579
5
119885
10=
120579
5
119885
11= 120579
6
119885
12=
120579
6
(7)
Equation (2) is transformed into the state space expres-sion [15]
4 Shock and Vibration
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
120579
1
120579
1
120579
2
120579
2
120579
3
120579
3
120579
4
120579
4
120579
5
120579
5
120579
6
120579
6
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
minus119896
1
119869
1198901
minus119888
1
119869
1198901
119896
1
119869
1198901
119888
1
119869
1198901
0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
119896
1
119869
1198902
119888
1
119869
1198902
minus119896
1
119869
1198902
minus119888
1
119869
1198902
0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0
minus119896
2
119869
1015840
1198902
minus119888
2
119869
1015840
1198902
119896
2
119869
1015840
1198902
119888
2
119869
1015840
1198902
0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0
119896
2
119869
1198903
119888
2
119869
1198903
minus119896
2
119869
1198903
minus119888
2
119869
1198903
0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0
minus119896
119898
119869driving
minus119888
119898
119869driving
119896
119898
119869driving
119888
119898
119869driving0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
119896
119898
119869driven
119888
119898
119869driven
minus119896
119898
119869driven
minus119888
119898
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
+
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 0 0 0 0 0
1
119869
1198901
0 0 0 0 0
0 0 0 0 0 0
0 minus
1
119869
1198902
0 0 0 0
0 0 0 0 0 0
0 0
1
119869
1015840
1198902
0 0 0
0 0 0 0 0 0
0 0 0 minus
1
119869
1198903
0 0
0 0 0 0 0 0
0 0 0 0
1
119869driving0
0 0 0 0 0 0
0 0 0 0 0 minus
1
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
119872
1
119872
2
119872
3
119872
4
119872
5
119872
6
]
]
]
]
]
]
]
]
]
]
(8)
Shock and Vibration 5
At the same time the state space expression for thetorsional mathematical analysis model output variable isobtained
[
[
[
[
[
[
[
[
[
[
[
[
119884
1
119884
2
119884
3
119884
4
119884
5
119884
6
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
119885
2
119885
4
119885
6
119885
8
119885
10
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(9)
The parameters of the mathematical model are substi-tuted into the state space expression The torsional vibrationresponse of the system can then be obtained by Runge-Kuttamethod
3 Determining Parameters in the Model
31 Determining Coefficients in the Model The transmissionshaftrsquos main parameters for the car researched here are listedin Table 1 The main parameters of both driving and drivengears are listed in Table 2
The torsional stiffness of the transmission shaft is
119870
1015840
119894
=
119866119868
119875
119871
N sdotmrad (10)
119866 is the shear modulus 794times1010Nsdotmminus2 and 119871 is the lengthof the shaft
The transmission shaft of the car is modelled as a thin-walled circular cross-section
119868
119901asymp 2120587119889
3
(119863 minus 119889) = 486 times 10
minus6m4 (11)
The intermediate support and transmission shaft totalequivalent torsional stiffness values are as follows [16]
1
119870
119894
=
1
119870
119874
+
1
119870
1015840
119894
(12)
There are many calculation methods available for the lin-ear meshing stiffness of gears as far as accuracy is concerned
a single gear toothrsquos linear meshing stiffness is calculated bythe ISO method Results that have little difference to theactual meshing stiffness may be obtained by this methodThehypoid gears of Gleason are adopted in the main reducer ofthe vehicle with a gear meshing stiffness with a linear value[17]
119896
119898119887= 184 times 10
6Nm (13)
The value of the gearrsquos equivalent meshing damping is
119862
119898= 2120585radic119896
119898119887(
1
119898
1
+
1
119898
2
)N sdot sm (14)
119898
11198982are the driven and driving gearrsquos qualities and 120585 is the
damping ratio with a value of 01 hereThe average torsional stiffness of the gear is as follows
119870
119898=
119870
119898119887(119903
2
1198871
+ 119903
2
1198872
)
2119903
2
1198871
119903
2
1198872
= 234 times 10
3N sdotmrad (15)
where 1199031198871is the pitch circle radius of the driven gear and 119903
1198872
is the pitch circle radius of the driving gearThe equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint is
119869
1198901= 05 sdot (119869
1199041199111198901+ 119869
1198881198891198901) + 119869
1199111198881198901 (16)
119869
1199041199111198901is the first universal joint cross-shaftrsquos equivalent polar
moment of inertia about the first transmission axis 1198691198881198891198901
is the first transmission shaftrsquos equivalent polar moment ofinertia about its geometric centre 119869
1199111198881198901is the first joint shaft
forkrsquos equivalent polar moment of inertia about the firsttransmission axis
The 3d model of transmission shaft and main reducer isimported into UG software Values of 119869
1199041199111198901 1198691198881198891198901
and 1198691199111198881198901
arecalculated by UG the values are listed in Table 3
According to (16) 1198691198901= 0309234412 kgsdotm2 As the same
119869
1198902= 119869
1198901= 0309234412 kgsdotm2
Using the same method the cross-shaft and shaft forkrsquosmoments of inertia can be calculated these act from thesecond universal joint and their values are listed in Table 4
119869
1015840
1198902
= 18665142935 kgsdotm2 11986910158401198903
= 2324507441 kgsdotm2119869driving = 1236925720 kgsdotm2 and 119869driven =
0027998012 kgsdotm2The parameters for (1) can be found in Table 5
32 Determination of Car Main Reducer External ExcitationHere considering fluctuations in main reducer input torqueand load torque the input torque and load torque are set asfollows [18]
119872
1(119905) = 119872
1+ 120590 cos120596
119896119905
119872
6(119905) = 119872
6+ 120590 cos120596
119896119905
(17)
where1198721is the input torque from the engine119872
6is the load
torque 120590 is the coefficient of torque fluctuation (its value is01) and 120596
119896is the angular velocity of the transmission axis
6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
120579
1
120579
1
120579
2
120579
2
120579
3
120579
3
120579
4
120579
4
120579
5
120579
5
120579
6
120579
6
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
minus119896
1
119869
1198901
minus119888
1
119869
1198901
119896
1
119869
1198901
119888
1
119869
1198901
0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
119896
1
119869
1198902
119888
1
119869
1198902
minus119896
1
119869
1198902
minus119888
1
119869
1198902
0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0
minus119896
2
119869
1015840
1198902
minus119888
2
119869
1015840
1198902
119896
2
119869
1015840
1198902
119888
2
119869
1015840
1198902
0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0
119896
2
119869
1198903
119888
2
119869
1198903
minus119896
2
119869
1198903
minus119888
2
119869
1198903
0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0
minus119896
119898
119869driving
minus119888
119898
119869driving
119896
119898
119869driving
119888
119898
119869driving0 0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0
119896
119898
119869driven
119888
119898
119869driven
minus119896
119898
119869driven
minus119888
119898
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
+
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
0 0 0 0 0 0
1
119869
1198901
0 0 0 0 0
0 0 0 0 0 0
0 minus
1
119869
1198902
0 0 0 0
0 0 0 0 0 0
0 0
1
119869
1015840
1198902
0 0 0
0 0 0 0 0 0
0 0 0 minus
1
119869
1198903
0 0
0 0 0 0 0 0
0 0 0 0
1
119869driving0
0 0 0 0 0 0
0 0 0 0 0 minus
1
119869driven
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
119872
1
119872
2
119872
3
119872
4
119872
5
119872
6
]
]
]
]
]
]
]
]
]
]
(8)
Shock and Vibration 5
At the same time the state space expression for thetorsional mathematical analysis model output variable isobtained
[
[
[
[
[
[
[
[
[
[
[
[
119884
1
119884
2
119884
3
119884
4
119884
5
119884
6
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
119885
2
119885
4
119885
6
119885
8
119885
10
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(9)
The parameters of the mathematical model are substi-tuted into the state space expression The torsional vibrationresponse of the system can then be obtained by Runge-Kuttamethod
3 Determining Parameters in the Model
31 Determining Coefficients in the Model The transmissionshaftrsquos main parameters for the car researched here are listedin Table 1 The main parameters of both driving and drivengears are listed in Table 2
The torsional stiffness of the transmission shaft is
119870
1015840
119894
=
119866119868
119875
119871
N sdotmrad (10)
119866 is the shear modulus 794times1010Nsdotmminus2 and 119871 is the lengthof the shaft
The transmission shaft of the car is modelled as a thin-walled circular cross-section
119868
119901asymp 2120587119889
3
(119863 minus 119889) = 486 times 10
minus6m4 (11)
The intermediate support and transmission shaft totalequivalent torsional stiffness values are as follows [16]
1
119870
119894
=
1
119870
119874
+
1
119870
1015840
119894
(12)
There are many calculation methods available for the lin-ear meshing stiffness of gears as far as accuracy is concerned
a single gear toothrsquos linear meshing stiffness is calculated bythe ISO method Results that have little difference to theactual meshing stiffness may be obtained by this methodThehypoid gears of Gleason are adopted in the main reducer ofthe vehicle with a gear meshing stiffness with a linear value[17]
119896
119898119887= 184 times 10
6Nm (13)
The value of the gearrsquos equivalent meshing damping is
119862
119898= 2120585radic119896
119898119887(
1
119898
1
+
1
119898
2
)N sdot sm (14)
119898
11198982are the driven and driving gearrsquos qualities and 120585 is the
damping ratio with a value of 01 hereThe average torsional stiffness of the gear is as follows
119870
119898=
119870
119898119887(119903
2
1198871
+ 119903
2
1198872
)
2119903
2
1198871
119903
2
1198872
= 234 times 10
3N sdotmrad (15)
where 1199031198871is the pitch circle radius of the driven gear and 119903
1198872
is the pitch circle radius of the driving gearThe equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint is
119869
1198901= 05 sdot (119869
1199041199111198901+ 119869
1198881198891198901) + 119869
1199111198881198901 (16)
119869
1199041199111198901is the first universal joint cross-shaftrsquos equivalent polar
moment of inertia about the first transmission axis 1198691198881198891198901
is the first transmission shaftrsquos equivalent polar moment ofinertia about its geometric centre 119869
1199111198881198901is the first joint shaft
forkrsquos equivalent polar moment of inertia about the firsttransmission axis
The 3d model of transmission shaft and main reducer isimported into UG software Values of 119869
1199041199111198901 1198691198881198891198901
and 1198691199111198881198901
arecalculated by UG the values are listed in Table 3
According to (16) 1198691198901= 0309234412 kgsdotm2 As the same
119869
1198902= 119869
1198901= 0309234412 kgsdotm2
Using the same method the cross-shaft and shaft forkrsquosmoments of inertia can be calculated these act from thesecond universal joint and their values are listed in Table 4
119869
1015840
1198902
= 18665142935 kgsdotm2 11986910158401198903
= 2324507441 kgsdotm2119869driving = 1236925720 kgsdotm2 and 119869driven =
0027998012 kgsdotm2The parameters for (1) can be found in Table 5
32 Determination of Car Main Reducer External ExcitationHere considering fluctuations in main reducer input torqueand load torque the input torque and load torque are set asfollows [18]
119872
1(119905) = 119872
1+ 120590 cos120596
119896119905
119872
6(119905) = 119872
6+ 120590 cos120596
119896119905
(17)
where1198721is the input torque from the engine119872
6is the load
torque 120590 is the coefficient of torque fluctuation (its value is01) and 120596
119896is the angular velocity of the transmission axis
6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
At the same time the state space expression for thetorsional mathematical analysis model output variable isobtained
[
[
[
[
[
[
[
[
[
[
[
[
119884
1
119884
2
119884
3
119884
4
119884
5
119884
6
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
119885
2
119885
4
119885
6
119885
8
119885
10
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 0 0 1
]
]
]
]
]
]
]
]
]
]
]
]
sdot
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
119885
1
119885
2
119885
3
119885
4
119885
5
119885
6
119885
7
119885
8
119885
9
119885
10
119885
11
119885
12
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
]
(9)
The parameters of the mathematical model are substi-tuted into the state space expression The torsional vibrationresponse of the system can then be obtained by Runge-Kuttamethod
3 Determining Parameters in the Model
31 Determining Coefficients in the Model The transmissionshaftrsquos main parameters for the car researched here are listedin Table 1 The main parameters of both driving and drivengears are listed in Table 2
The torsional stiffness of the transmission shaft is
119870
1015840
119894
=
119866119868
119875
119871
N sdotmrad (10)
119866 is the shear modulus 794times1010Nsdotmminus2 and 119871 is the lengthof the shaft
The transmission shaft of the car is modelled as a thin-walled circular cross-section
119868
119901asymp 2120587119889
3
(119863 minus 119889) = 486 times 10
minus6m4 (11)
The intermediate support and transmission shaft totalequivalent torsional stiffness values are as follows [16]
1
119870
119894
=
1
119870
119874
+
1
119870
1015840
119894
(12)
There are many calculation methods available for the lin-ear meshing stiffness of gears as far as accuracy is concerned
a single gear toothrsquos linear meshing stiffness is calculated bythe ISO method Results that have little difference to theactual meshing stiffness may be obtained by this methodThehypoid gears of Gleason are adopted in the main reducer ofthe vehicle with a gear meshing stiffness with a linear value[17]
119896
119898119887= 184 times 10
6Nm (13)
The value of the gearrsquos equivalent meshing damping is
119862
119898= 2120585radic119896
119898119887(
1
119898
1
+
1
119898
2
)N sdot sm (14)
119898
11198982are the driven and driving gearrsquos qualities and 120585 is the
damping ratio with a value of 01 hereThe average torsional stiffness of the gear is as follows
119870
119898=
119870
119898119887(119903
2
1198871
+ 119903
2
1198872
)
2119903
2
1198871
119903
2
1198872
= 234 times 10
3N sdotmrad (15)
where 1199031198871is the pitch circle radius of the driven gear and 119903
1198872
is the pitch circle radius of the driving gearThe equivalent polar moment of inertia of the first
transmission shaft at node 1 of the universal joint is
119869
1198901= 05 sdot (119869
1199041199111198901+ 119869
1198881198891198901) + 119869
1199111198881198901 (16)
119869
1199041199111198901is the first universal joint cross-shaftrsquos equivalent polar
moment of inertia about the first transmission axis 1198691198881198891198901
is the first transmission shaftrsquos equivalent polar moment ofinertia about its geometric centre 119869
1199111198881198901is the first joint shaft
forkrsquos equivalent polar moment of inertia about the firsttransmission axis
The 3d model of transmission shaft and main reducer isimported into UG software Values of 119869
1199041199111198901 1198691198881198891198901
and 1198691199111198881198901
arecalculated by UG the values are listed in Table 3
According to (16) 1198691198901= 0309234412 kgsdotm2 As the same
119869
1198902= 119869
1198901= 0309234412 kgsdotm2
Using the same method the cross-shaft and shaft forkrsquosmoments of inertia can be calculated these act from thesecond universal joint and their values are listed in Table 4
119869
1015840
1198902
= 18665142935 kgsdotm2 11986910158401198903
= 2324507441 kgsdotm2119869driving = 1236925720 kgsdotm2 and 119869driven =
0027998012 kgsdotm2The parameters for (1) can be found in Table 5
32 Determination of Car Main Reducer External ExcitationHere considering fluctuations in main reducer input torqueand load torque the input torque and load torque are set asfollows [18]
119872
1(119905) = 119872
1+ 120590 cos120596
119896119905
119872
6(119905) = 119872
6+ 120590 cos120596
119896119905
(17)
where1198721is the input torque from the engine119872
6is the load
torque 120590 is the coefficient of torque fluctuation (its value is01) and 120596
119896is the angular velocity of the transmission axis
6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
Table 1 Main parameters of the transmission shaft
Parameters Shear modulus119866 (GPa)
Length of the shaft119871 (mm)
Shaft tube sectionoutside diameter
119863 (mm)
Shaft tube sectioninside diameter
119889 (mm)First shaft 794 524 635 599Second shaft 794 875 635 599
Table 2 Main parameters of gears
Name and code Driven gear Driving gearThe number of teeth (119885) 41 8Surface cone angle (DELTA-119860) 76∘ 551015840 4010158401015840 asymp 7693∘ 18∘ 141015840 1010158401015840 asymp 1824∘
Reference cone angle (DELTA-119861) 75∘ 551015840 5010158401015840 asymp 7593∘ 12∘ 561015840 asymp 1293∘
Root angle (DELTA-119865) 70∘ 161015840 4710158401015840 asymp 7028∘ 12∘ 21015840 3510158401015840 asymp 1204∘
Offset distance 30mm (lower)The average pressure angle (ALPHA) 21∘ 151015840 asymp 2125∘
Pitch circle diameter (119863) 170601mmEquivalent radius (119877) 7318mm 205mmMean spiral angle (BETA) 26∘ 461015840 2510158401015840 asymp 2677∘ 49∘ 591015840 4810158401015840 asymp 499967∘
Cutter diameter (BETA-119877) 1524mmThe gear width (BF) 25mm 333mmBase circle diameter (Db) Db =119863 lowast COS(ALPHA)
Table 3 Values of 1198691199041199111198901
1198691198881198891198901
and 1198691199111198881198901
Moment of inertia 119869
1199041199111198901
119869
1198881198891198901
119869
1199111198881198901
About the 119909-axis 0000538185 0617267494 0002713877About the 119910-axis 0000129689 0001702246 0000535828About the 119911-axis 00005382 0617267479 0002981971
Table 4 Values of 11986910158401199041199111198902
11986910158401198881198891198902
and 11986910158401199111198881198902
Moment of inertia 119869
1015840
1199041199111198902
119869
1015840
1198881198891198902
119869
1015840
1199111198881198902
About the 119909-axis 0342704517 3720747326 0342704517About the 119910-axis 0000541772 0012791622 0000541772About the 119911-axis 0342442366 3731261792 0342442366
Considering when the CDV car is running at an engine speedof 3500 rpm119872
1= 15120Nsdotm the vibration and noise were
large The normal mass of the car is 1500 kg and the wheeleffective radius is 290mm giving119872
6= 750Nsdotm the speed
of transmission shaft is 2500 rpm
4 Response Analysis of the SystemrsquosTorsional Vibration
41 Effects of the Angle between the Axes on Vibrationin the Main Reducer Having established the mathematicalrelationship between the angle of the transmission shafts andthe output variables of the state space using a MATLABsimulation the system response curves for angular velocityand angular displacement are realised as shown in Figures 3and 4
8000
11000
14000
17000
20000
0 1 2 3 4 5 6 7 8 9 10
Driv
ing
gear
angu
lar v
eloci
ty (d
eg)
Time (s)
Angle 12degAngle 10degAngle 8deg
Angle 6degAngle 5degAngle 3deg
Figure 3 Response curve driving gear angular velocity
In Figure 3 the installation angle 120572 is taking valuesof 0∘ 3∘ 5∘ 6∘ 8∘ 10∘ and 12∘ in turn The transmissionsystem consists of multiparts During engine start-up phasecoupling effect between multiparts causes the change ofangular velocity fluctuations at different installation angleswhile angular velocity fluctuations are stable in a certain areaand periodic vibrating by a certain time When installationangle is 12∘ the unstable time of fluctuation is longest and
Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
Table 5 Main parameters of transmission system
Name Code Parameters Name Code ParametersThe series equivalentstiffness of the firsttransmission shaftrsquos tubeand its intermediatesupport
119870
1
736 times 10
5
times 119870
119874
736 times 10
5
+ 119870
119874
Nsdotmrad
The series equivalentstiffness of the secondtransmission shaftrsquos tubeand its intermediatesupport
119870
2
441 times 10
5
times 119870
119874
441 times 10
5
+ 119870
119874
Nsdotmrad
The damping coefficient ofthe first transmission shaft 119862
1
0002The damping coefficient ofthe second transmissionshaft
119862
2
0002
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 1 of the universal joint
119869
1198901
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thefirst transmission shaft atnode 2 of the universal joint
119869
1198902
0309234412 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 2 of the universaljoint
119869
1015840
1198902
1866514293 kgsdotm2
The equivalent polarmoment of inertia of thesecond transmission shaftat node 3 of the universaljoint
119869
1198903
2324507441 kgsdotm2
The driving gear and drivengearrsquos average meshingstiffness in reverse
119870
119898
248 times 103NsdotmradThe driving gear and drivengearrsquos average meshingdamping
119862
119898
478 (Nsdotsm)
The equivalent polarmoment of inertia of themain reducer driving gear
119869driving 1236925720 kgsdotm2The equivalent polarmoment of inertia of themain reducer driven gear
119869driven 0027998012 kgsdotm2
Angle between transmission shafts (deg)
080706050403020100
Ang
ular
disp
lace
men
t (de
g)
0∘
1∘
2∘
3∘
4∘
5∘
6∘
7∘
8∘
9∘
10∘
Figure 4 Response curve driven gear angular displacement
stabilize fluctuation is largest While angle is 5∘sim6∘ drivinggear can quickly enter smooth transmission and fluctuationof angular velocity is minimal
The changes in the driven gearrsquos angular displacement areshown in Figure 4 With an analysis of response curve andvariation curve it is seen that the angle between transmissionshafts has an influence on vibration and noise in both gearsWith the change in angle between the transmission shafts thedriven gearrsquos amplitude of vibration increases at first from 0∘to 3∘ and then decreases to a series of small fluctuations ofstable amplitude at installation angles of 3∘ to 6∘ When theangle increases the torsional vibration intensifies
From an analysis of Figure 5 when the transmissionshaft stiffness is the same as that of its intermediate support
0
05
1
15
Tran
smiss
ion
erro
r (de
g)
0 1 2 3 4 5 6 7 8Time (s)
minus15
minus1
minus05
Angle 3degAngle 5degAngle 8deg
Angle 10degAngle 12deg
Figure 5 Transmission error angular displacementmdashtime curve
the transmission error fluctuates cyclically Different anglesbetween transmission shafts lead to different transmissionaccuracies When the angle between the transmission shafts
8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
0
2
4
6
8
10
12
0 1 2 3 4 5 6 7 8 9 10Time (s)
Ang
ular
acce
lera
tion
(deg
s2)
Support stiffness1500Nmm
Support stiffness1000Nmm
Support stiffness800Nmm
Support stiffness500Nmm
Figure 6 Angular acceleration plots for the driven gear for differentstiffness values
changes from 3∘ to 5∘ the transmission error fluctuation issmall While the angle is 5∘ the transmission error is min-imised therefore it affords a better transfer of engine speedthrough the universal joint As a result rear axle vibration andnoise caused by speed fluctuation can be reduced Based onthe above analysis the angle between transmission shafts notonly influences the transmission characteristics of the shaftbut also influences angular speed fluctuation and torsionalvibration of the gear system To improve transmission systemcomfort the design angle should be 5∘
42 The Response Analysis of Intermediate Support Stiffnesson Main Reducer Vibration In Figure 6 the input torqueand load torque have cosine-momentum With the interme-diate supportrsquos stiffness changing the angular accelerationof the driven gear will undergo cyclical fluctuations In thesimulation the intermediate support is variable and is set to500Nmm 800Nmm 1000Nmm and 1500Nmm in turnother settings remaining unchanged Through comparativeanalysis of the four plots in Figure 6 the driven gearrsquosangular acceleration fluctuations are different When theintermediate support stiffness is 500Nmm the angularacceleration fluctuation is relatively stable The effect on bothgearsrsquo meshing vibration is smaller
5 Experimental Verification
The main factor causing vibration is meshing of the gearsThe vibration of the main reducer in the rear bridge directlyaffects NVH performance Therefore vibration of the main
reducer and the NVH noise performance can reflect meshingvibration of the gears directly To verify the validity of thestudy intermediate support stiffness and installation anglebetween transmission shafts are changed in a full-scale cartest Through changes in the aforementioned factors NVHperformance status inside the car and vibration of the mainreducer would verify the validity of the study in actualoperating conditions
The test systems comprised a portable vibration testerdeveloped by Wuhan University of Technology for the auto-mobilemain reducer and a portable LMSTestLabNVHnoisetester from LMS Co (Belgium)
The portable vibration testing system has four acquisitionchannels One channel acquisition records the transmissionshaft speed signal the other two channels record vibrationacceleration signals in the vertical and horizontal directionsfrom the main reducer The recorded signals are displayed asplots of speed and the main reducer vibration accelerationon the computer screen in real-timeThe LMSTestLab NVHnoise tester can test noise inside the car in real-time andreflect the overall noise performance of the automobile
The experiment does not change the box car clutch frontand rear suspensions or any other factors the only changeswere made to the installation angle between transmissionshafts and the intermediate support stiffnessThe automotiveengine was run over its full working range of up to 6000 rpmThe experimental installation is shown in Figure 7 andvibration is tested by point-to-point measurement whichavoids the influence of other vibrationsThenoise tester (LMSCo Belgium) is used to verify the data of which the projectalways recorded two sets to allow later comparison
When the angle between transmission shafts is 7∘ theintermediate support stiffness is approximately 700Nmmand the experimental result is shown in Figure 8
When the angle between transmission shafts is 5∘ theintermediate support stiffness is approximately 500Nmmand the experimental result is shown in Figure 9
To further verify the effects of a change in installationangle and intermediate support stiffness on the rear axle theexperiment also tests the NVH (noise) inside the vehicleTheresults are shown in Figure 10
Comparing Figures 8 and 9 when the installation angleis 5∘ and the intermediate support stiffness is 500Nmmthe effect on the rear axle vibration is obviously smallerSeen from Figure 10 when the transmission shaft angleand intermediate support stiffness are changed the NVHperformance inside the car improvedThrough experimentalverification data simulation and analysis the data coincidewith experimental verification thereof
6 Conclusion
The research shows that the angle between transmissionshafts has a great influence on vibration and shock in therear axle main reducer The numerical matching of the rela-tionships between angle intermediate support stiffness andgears can be found by numerical solutionThe angle betweentransmission shafts and the intermediate support stiffnesscan then be quantified According to the CDV car studied
Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
The vertical direction
The axial direction
Photoelectric sensor
Figure 7 Experimental installation
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 8 Experimental results
Engine speed (rmin)
300
3000 4000 5000 6000
250200
2000
150100
1000
500
0
Vibr
atin
g (m
s2)
Vertical vibrationmdashspeed curve (speed up)Vertical vibrationmdashspeed curve (speed down)
Figure 9 Experimental results
in this research the installation angle between transmissionshafts should be designed to be 5∘ as far as possible andthe intermediate support stiffness should be 500Nmm aspredicted by theory and verified experimentally As a resultthe transmission shaftrsquos effect on vibration and noise from themain reducer can be decreased There is no other problemcaused after long-term test The method applied in thisresearch has reference value for vibration and noise reductionin variable axial transmission systems
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
20
30
40
50
60
70
1200 1600 2000 2400 2800 3200 3600
Pa (d
b)
(rpm)
A
B
55db
Figure 10 Experimental results noise test inside vehicle (119860 noiseeffect the angle of transmission shafts is 7∘ and the intermediatesupport stiffness is approximately 700Nmm 119861 noise effect theangle of transmission shafts is 5∘ and the intermediate supportstiffness is approximately 500Nmm)
Acknowledgment
It was partially supported by the WUT Innovation Fund145204003
References
[1] B Gao H Chen Y Ma and K Sanada ldquoDesign of nonlinearshaft torque observer for trucks with automated manual trans-missionrdquoMechatronics vol 21 no 6 pp 1034ndash1042 2011
[2] T P Turkstra and S E Semercigil ldquoVibration control for aflexible transmission shaft with an axially sliding supportrdquoJournal of Sound andVibration vol 206 no 4 pp 605ndash610 1997
[3] C L Yu L Zhang J G Wu and Z J Xie ldquoModeling andsimulation of amini-buswith dynamics ofmulti-body systemsrdquoJournal of Chongqing University vol 26 pp 35ndash38 2003
10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 Shock and Vibration
[4] M Gnanakumarr S Theodossiades H Rahnejat and M Men-day ldquoImpact-induced vibration in vehicular driveline systemstheoretical and experimental investigationsrdquo Proceedings of theInstitution ofMechanical Engineers Part K Journal ofMulti-BodyDynamics vol 219 pp 1ndash12 2005
[5] J L Xu ldquoAnalysis of contact stress of hypoid gear of micro-carreal rear axlerdquo in Proceedings of the 2nd International Conferenceon Electronic amp Mechanical Engineering and Information Tech-nology (EMEIT 12) vol 9 pp 949ndash954 2012
[6] K Liu Research of the Soft Body Dynamics of the Gears in MainReducer of Car Drive Axle Wuhan University of TechnologyWuhan China 2012
[7] J Baumann D D Torkzadeh A Ramstein U Kiencke andT Schlegl ldquoModel-based predictive anti-jerk controlrdquo ControlEngineering Practice vol 14 no 3 pp 259ndash266 2006
[8] L Webersinke L Augenstein and U Kiencke ldquoAdaptive linearquadratic control for high dynamical and comfortable behaviorof a heavy truckrdquo SAE Technical Paper 0534 2008
[9] A Artoni M Gabiccini and M Kolivand ldquoEase-off basedcompensation of tooth surface deviations for spiral bevel andhypoid gears only the pinion needs correctionsrdquo Mechanismand Machine Theory vol 61 pp 84ndash101 2013
[10] D Park M Kolivand and A Kahraman ldquoPrediction of surfacewear of hypoid gears using a semi-analytical contact modelrdquoMechanism and Machine Theory vol 52 pp 180ndash194 2012
[11] Q Wang and Y-D Zhang ldquoCoupled analysis based dynamicresponse of two-stage helical gear transmission systemrdquo Journalof Vibration and Shock vol 31 no 10 pp 87ndash91 2012
[12] W W Zheng Mechanical Principle Higher Education PressBeijing China 1997
[13] Z Y Zhu Theoretical Mechanics (I) Peking University PressBeijing China 1984
[14] Q Li and J J Zhang ldquoAnalysis and arrangement of mine cardriveline systemrdquoMechanical Research ampApplication vol 4 pp56ndash61 2010
[15] L H Wang Y Y Huang and Y F Li ldquoStudy on nonlinearvibration characteristics of spiral bevel transmission systemrdquoChina Mechanical Engineering vol 18 no 3 pp 260ndash264 2007
[16] L Liu Finite Element Analysis of Car Propeller Shaft SupportingBracket vol 1 Drive Systems Technology Shanghai China2007
[17] O D Mohammed M Rantatalo and J-O Aidanpaa ldquoImprov-ing mesh stiffness calculation of cracked gears for the purposeof vibration-based fault analysisrdquo Engineering Failure Analysisvol 34 pp 235ndash251 2013
[18] M Pang X-J Zhou and C-L Yang ldquoSimulation of nonlinearvibration of automobile main reducerrdquo Journal of ZhejiangUniversity (Engineering Science) vol 43 no 3 pp 559ndash5642009
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of