Embed Size (px)
Citation preview

Research ArticleEstimation of Individual Cylinder Air-Fuel Ratio inGasoline Engine with Output Delay
Changhui Wang and Zhiyuan Liu
Department of Control Science and Engineering, Harbin Institute of Technology, Harbin 150001, China
Correspondence should be addressed to Changhui Wang; wang [email protected]
Received 1 March 2016; Revised 23 June 2016; Accepted 14 July 2016
Academic Editor: Jose A. Somolinos
Copyright © 2016 C. Wang and Z. Liu.This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
The estimation of the individual cylinder air-fuel ratio (AFR) with a single universal exhaust gas oxygen (UEGO) sensor installedin the exhaust pipe is an important issue for the cylinder-to-cylinder AFR balancing control, which can provide high-quality torquegeneration and reduce emissions in multicylinder engine. In this paper, the system dynamic for the gas in exhaust pipe includingthe gasmixing, gas transport, and sensor dynamics is described as an output delay system, and a newmethod using the output delaysystem observer is developed to estimate the individual cylinder AFR. With the AFR at confluence point augmented as a systemstate, an observer for the augmented discrete system with output delay is designed to estimate the AFR at confluence point. Usingthe gas mixingmodel, a method with the designed observer to estimate the individual cylinder AFR is presented.The validity of theproposedmethod is verified by the simulation results from a spark ignition gasoline engine from engine software enDYNAby Tesis.
1. Introduction
Cylinder-to-cylinder air-fuel ratio (AFR) balancing control ininternal combustion engines with multiple cylinders is oneof the technology trends to satisfy the increasingly stringentemission regulations, which can also improve the engineperformance, such as thermal efficiency and fuel economy.The AFR of each cylinder is decided by the aspirated airmass, the injected fuel mass, and the residual gas fromthe prior cycle, in which the combustion stroke of eachcylinder sequentially occurs along the rotational angle of thecrankshaft. Due to the air breathing variability and injectorvariability, there exists AFR imbalance between cylinders,leading to adverse impacts on emission performance usingthe conventional controllers [1, 2].
In order to improve the AFR control accuracy, therehas been a great deal of research that focuses on the AFRcontrol of individual cylinders [3–10]. In fact, the estimationof the individual cylinder AFRwith a single universal exhaustgas oxygen (UEGO) sensor installed in the exhaust pipeis one of the key technology trends for the individualcylinder AFR control. The digital filtering techniques areemployed to extract the AFR imbalance signals from oxygensensor voltage signals in [11], in which the oxygen sensor
voltage signal is processed to determine imbalanced cylinderidentification and AFR cylinder imbalance levels. In [12], amodeling method to estimate the individual fuel-gas ratio isproposed to estimate AFR, which is used for an adaptive gen-eralized predictive control approach to balance the individualcylinder characteristics in the static engine operation mode.A static steady state observer based on the individual cylinderAFR model along the air mass flow, gas mixing, and sensordynamics in an exhaust manifold can be found in [13]. In thediesel engines, a nonlinear observer is proposed to estimatethe individual cylinder AFR [14]. In [15], a PI compensator isdesigned to compensate the cylinder-by-cylinder variations,in which an input observer is proposed to estimate individualcylinder AFR.
However, the transport delay and sensor delay from theexhaust confluence point to UEGO sensor output are ignoredin the proposed observers from the above papers, whichmay reduce the accuracy of the AFR estimation of eachcylinder. In order to improve the individual cylinder AFRestimation accuracy, the system dynamics in the exhaust pipeincluding gas transport and sensor dynamics is describedas an augmented discrete system with output delay in thispaper, in which the AFR at confluence point is augmented as
Hindawi Publishing CorporationJournal of SensorsVolume 2016, Article ID 5908459, 9 pageshttp://dx.doi.org/10.1155/2016/5908459

2 Journal of Sensors
Three way catalyst
Cylinders
Fuel injector
Throttle
Confluence point
UEGO sensor
Exhaust manifoldIntake manifold
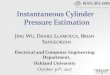
Figure 1: Schematic of the 4-cylinder SI gasoline engine.
a system state. Then, an observer for the augmented discretesystem with output delay is designed. With the combinationof the designed observer and the gas mixing model atconfluence point, the method to estimate the individualcylinder AFR is presented. The performance of the proposedmethod is validated against the simulation result from enginesoftware enDYNA provided by Tesis, and a comparison withexistingmethod is given during an urban driving cycle, whichdemonstrates that the proposed method can improve theaccuracy of the individual cylinder AFR estimation.
This paper is organized as follows. In Section 2, the systemdynamics in the exhaust pipe including gas transport andUEGO sensor dynamics is described as an augmented systemwith output delay. In Section 3, an observer for the outputdelay system is designed, and the method to estimate theindividual cylinder AFR is presented. Simulation results fromenDYNA are presented in Section 4, and the conclusions aresummarized in Section 5.
2. Problem Formulation
A schematic diagram of a 4-cylinder spark-ignited (SI)gasoline engine is shown in Figure 1, where the fuel injectorsequipped at the inlet port near to the intake valve are con-trolled individually. The fuel mass burnt in each cylinder isinjected by the corresponding injector, and the fuel injectioncommand is delivered to the injector of each cylinder seriallyalong the crank angle. The AFR of each cylinder is 𝜆
𝑖=
𝑚cyli/𝑚air, 𝑖 = 1, 2, 3, 4, where 𝑚cyli is the fuel mass into thecylinder and𝑚air is the air mass into the cylinder.
After combustion, the combusted gas of each cylinder isexhausted into the corresponding runner during the exhauststroke of each cylinder and passes through their runners andconfluence in the public exhaust manifold. Then, the AFRof the mixed gas is measured by a UEGO sensor, and themixed gas runs to the outside passing through the catalyst.The system dynamics in the exhaust pipe includes the gasmixing, gas transport, and sensor dynamics, in which thetransfer function from the confluence point to sensor outputcan be given by [13]
𝐺exh (𝑠) =𝜆sen (𝑠)
𝜆𝑐 (𝑠)
=𝑒−𝛿𝑠
(1 + 𝜏mix𝑠) (1 + 𝜏sen𝑠), (1)
where 𝜆𝑐is the AFR at the exhaust confluence point, 𝜆sen is
the measured AFR of the UEGO sensor, 𝛿 = 𝛿mix + 𝛿sen isthe time delay including the transport delay 𝛿mix and sensordelay 𝛿sen, 𝜏mix is the time constant of themixing process, and𝜏sen is the sensor time constant.
For an engine with 4 cylinders, the combined UEGOsensor signal is sampled at the exhaust top dead center of eachcylinder, and the sampling period 𝑇
𝑠is related to the engine
cycle period as 𝑇𝑠= 𝑇𝑐/4, in which the engine cycle period is
𝑇𝑐= 120/𝑛
𝑒, where 𝑛
𝑒is the engine speed in rpm. Consisting
of the zero-order holder and themixing and sensor dynamics,the discrete formofmodel (1) with the sampling period𝑇
𝑠can
be given by [13]
𝑄exh (𝑧) = 𝑧−𝑚(1 + 𝑎
𝑧 − 1
𝑧 − 𝛼mix+ 𝑏
𝑧 − 1
𝑧 − 𝛼sen) , (2)
where
𝛼mix = 𝑒−𝑇𝑠/𝜏mix ,
𝛼sen = 𝑒−𝑇𝑠/𝜏sen ,
𝑚 =𝛿
𝑇𝑠
,
𝑎 =−𝜏mix𝜏mix − 𝜏sen
,
𝑏 =𝜏sen
𝜏mix − 𝜏sen,
𝑧 = 𝑒𝑇𝑠𝑠.
(3)
Furthermore, (2) can be written as a state-space form withinput delay [15]:
𝑥𝑞 (𝑙 + 1) = 𝐴𝑞𝑥𝑞 (𝑙) + 𝐵𝑞𝜆𝑐 (𝑙 − 𝑚) ,
𝜆sen (𝑙) = 𝐶𝑞𝑥𝑞 (𝑙) ,(4)

Journal of Sensors 3
where
𝐴𝑞= (𝛼mix 0
0 𝛼sen) ,
𝐵𝑞= (1
1) ,
𝐶𝑞= (𝑎 (𝛼mix − 1) 𝑏 (𝛼sen − 1)) ,
𝑥𝑞 (𝑙) = (
𝑥𝑞1 (𝑙)
𝑥𝑞2 (𝑙)) ,
𝑥𝑞1 (𝑙) =
𝜆sen (𝑙) − 𝑏 (𝛼sen − 1) 𝑥𝑞2 (𝑙)
𝑎 (𝛼mix − 1),
𝑥𝑞2 (𝑙) =
1
(𝛼sen − 𝛼mix) 𝑏 (𝛼sen − 1)(𝛼sen𝜆sen (𝑙)
− 𝛼mix𝛼sen𝜆sen (𝑙 − 1)
+ (1 − 2𝑎𝛼sen − 2𝑏𝛼mix − 𝛼mix − 𝛼sen + 𝑎 + 𝑏)
⋅ 𝜆𝑐 (𝑙 − 𝑚) + (𝑎𝛼sen + 𝑏𝛼mix + 𝛼mix𝛼sen)
⋅ 𝜆𝑐 (𝑙 − 𝑚 − 1)) .
(5)
Define the new system state as 𝑥𝑞(𝑙) = 𝑥
𝑞(𝑙 + 𝑚), and (4)
with input delay can also be rewritten as the following discretesystem with output delay:
𝑥𝑞 (𝑙 + 1) = 𝐴𝑞𝑥𝑞 (𝑙) + 𝐵𝑞𝜆𝑐 (𝑙) ,
𝜆sen (𝑙) = 𝐶𝑞𝑥𝑞 (𝑙 − 𝑚) .(6)
𝜆𝑐(𝑙) in (6) is unknown, which can be considered as a
system state due to the small rate of change of 𝜆𝑐(𝑙). Then,
an augmented discrete system with output delay from (6) canbe obtained:
𝑥 (𝑙 + 1) = 𝐴𝑥 (𝑙) ,
𝑦 (𝑙) = 𝐶𝑥 (𝑙 − 𝑚) ,
(7)
where
𝑥 (𝑙) = (𝑥𝑞 (𝑙)
𝜆𝑐 (𝑙)) ,
𝐴 = (
𝛼mix 0 1
0 𝛼sen 1
0 0 1
) ,
𝑦 (𝑙) = 𝜆sen (𝑙) ,
𝐶 = (𝑎 (𝛼mix − 1) 𝑏 (𝛼sen − 1) 0) .
(8)
Equation (7) indicates that the estimation of the AFR 𝜆𝑐
at the exhaust confluence point becomes the state estimationof the discrete system with output delay (7).
3. Observer Design for Discrete System withOutput Delay
The observer for the output delay system (7) is given:
�� (𝑙 + 1) = 𝐴�� (𝑙) + 𝐿 (𝑦 (𝑙) − 𝐶�� (𝑙 − 𝑚)) ,
�� (𝑙) = 𝐶�� (𝑙 − 𝑚) ,
(9)
where �� ∈ R is the state estimate and 𝐿 ∈ R3×1 isthe feedback gain matrix. The asymptotical stability of theproposed observer (9) is analyzed in the following theorem.
Theorem 1. There exist matrices 𝐿, 𝑃 = 𝑃𝑇 > 0, 𝑄 = 𝑄𝑇 ≥ 0,and 𝑍 = 𝑍𝑇 ≥ 0, such that the following linear matrixinequality (LMI) is feasible:
Ξ =(((
(
−𝑃 + 𝑄 +𝑀𝑇+𝑀 −𝑀
𝑇+ 𝑁 𝐴
𝑇𝑃 𝑀
𝑇(𝐴𝑇− 𝐼)𝑍
−𝑀 +𝑁𝑇
−𝑄 − 𝑁𝑇− 𝑁 −𝐶
𝑇𝐿𝑇𝑃 𝑁
𝑇−𝐶𝑇𝐿𝑇𝑍
𝑃𝐴 −𝑃𝐿𝐶 −𝑃 0 0
𝑀 𝑁 0 −𝑚−1𝑍 0
𝑍 (𝐴 − 𝐼) −𝑍𝐿𝐶 0 0 𝑚−1(𝑍 − 2𝑃)
)))
)
< 0; (10)
then observer (9) is asymptotically stable.
Proof. Set the estimation error 𝑒(𝑙) = ��(𝑙)−𝑥(𝑙), and the errordynamic system between (7) and (9) is obtained:
𝑒 (𝑙 + 1) = 𝐴𝑒 (𝑙) − 𝐿𝐶𝑒 (𝑙 − 𝑚) . (11)
Denote 𝜂(𝑙) = 𝑒(𝑙 + 1) − 𝑒(𝑙); then we have
𝑒 (𝑙 − 𝑚) = 𝑒 (𝑙) −
𝑙−1
∑
𝑛=𝑙−𝑚
𝜂 (𝑛) ,
𝜂 (𝑙) = (𝐴 − 𝐼) 𝑒 (𝑙) − 𝐿𝐶𝑒 (𝑙 − 𝑚) .
(12)

4 Journal of Sensors
Choose a Lyapunov functional candidate as
𝑉 (𝑙) = 𝑒𝑇(𝑙) 𝑃𝑒 (𝑙) +
𝑙−1
∑
𝑖=𝑙−𝑚
𝑒𝑇(𝑖) 𝑄𝑒 (𝑖)
+
0
∑
𝑗=−𝑚+1
𝑙−1
∑
𝑖=𝑙−1+𝑗
𝜂𝑇(𝑖) 𝑍𝜂 (𝑖) .
(13)
Define Δ𝑉 = 𝑉(𝑙 + 1) − 𝑉(𝑙); then along the solution of (11)and (12) we have
Δ𝑉 (𝑙) = (𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
𝑇
⋅ (−𝑃 + 𝑄 + 𝐴
𝑇𝑃𝐴 −𝐴
𝑇𝑃𝐿𝐶
−𝐶𝑇𝐿𝑇𝑃𝐴 −𝑄 + 𝐶
𝑇𝐿𝑇𝑃𝐿𝐶
)(𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
+ 𝑚𝜂𝑇(𝑙) 𝑍𝜂 (𝑙) −
𝑙−1
∑
𝑛=𝑙−𝑚
𝜂𝑇(𝑛) 𝑍𝜂 (𝑛) .
(14)
According to Lemma 1 in [16], for any constantmatrix𝑍 > 0,𝑀, and𝑁, the following inequality holds:
−
𝑙−1
∑
𝑛=𝑙−𝑚
𝜂𝑇(𝑛) 𝑍𝜂 (𝑛) ≤ (
𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
𝑇
⋅ (𝑀𝑇+𝑀 −𝑀
𝑇+ 𝑁
−𝑀 +𝑁𝑇−𝑁𝑇− 𝑁)(
𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
+ 𝑚(𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
𝑇
⋅ (𝑀𝑇
𝑁𝑇)𝑍−1(𝑀 𝑁)(
𝑒 (𝑙)
𝑒 (𝑙 − 𝑚)) .
(15)
With the combination of (14) and (15), we have
Δ𝑉 (𝑙) ≤ (𝑒 (𝑙)
𝑒 (𝑙 − 𝑚))
𝑇
Ω(𝑒 (𝑙)
𝑒 (𝑙 − 𝑚)) , (16)
where
Ω
= (−𝑃 + 𝑄 +𝑀
𝑇+𝑀 + 𝐴
𝑇𝑃𝐴 + 𝑚 (𝐴 − 𝐼)
𝑇𝑍 (𝐴 − 𝐼) + 𝑚𝑀
𝑇𝑍−1𝑀 −𝑀
𝑇+ 𝑁 − 𝐴
𝑇𝑃𝐿𝐶 − 𝑚 (𝐴 − 𝐼)
𝑇𝑍𝐿𝐶 + 𝑚𝑀
𝑇𝑍−1𝑁
∗ −𝑄 − 𝑁𝑇− 𝑁 + 𝐶
𝑇𝐿𝑇𝑃𝐿𝐶 − 𝑚𝐶
𝑇𝐿𝑇𝑍𝐿𝐶 + 𝑚𝑁
𝑇𝑍−1𝑁
) .
(17)
By Schur complement [17], the following LMI (18)guarantees Ω < 0, which can guarantee Δ𝑉(𝑙) < 0 and theasymptotical stability of observer (9):
Π =(((
(
−𝑃 + 𝑄 +𝑀𝑇+𝑀 −𝑀
𝑇+ 𝑁 𝐴
𝑇𝑃 𝑀
𝑇(𝐴𝑇− 𝐼)𝑍
−𝑀 +𝑁𝑇
−𝑄 − 𝑁𝑇− 𝑁 −𝐶
𝑇𝐿𝑇𝑃 𝑁
𝑇−𝐶𝑇𝐿𝑇𝑍
𝑃𝐴 −𝑃𝐿𝐶 −𝑃 0 0
𝑀 𝑁 0 −𝑚−1𝑍 0
𝑍 (𝐴 − 𝐼) −𝑍𝐿𝐶 0 0 −𝑚−1𝑍
)))
)
< 0. (18)
Now, condition (10) guaranteeing (18) must be proved.Define𝑊 = diag(𝐼, 𝐼, 𝐼, 𝐼, 𝑃𝑍−1), and we have
𝑊𝑇Π𝑊 =
((
(
−𝑃 + 𝑄 +𝑀𝑇+𝑀 −𝑀
𝑇+ 𝑁 𝐴
𝑇𝑃 𝑀
𝑇(𝐴𝑇− 𝐼) 𝑃
−𝑀 +𝑁𝑇
−𝑄 − 𝑁𝑇− 𝑁 −𝐶
𝑇𝐿𝑇𝑃 𝑁
𝑇−𝐶𝑇𝐿𝑇𝑃
𝑃𝐴 −𝑃𝐿𝐶 −𝑃 0 0
𝑀 𝑁 0 −𝑚−1𝑍 0
𝑃 (𝐴 − 𝐼) −𝑃𝐿𝐶 0 0 −𝑚−1𝑃𝑍−1𝑃
))
)
. (19)

Journal of Sensors 5
enDYNA R4-cylinder SI-engine
Output delay observer (23)
Gas mixing
+
−
e
𝜆1
𝜆2 𝜆c
𝜆3
𝜆4
��1
��2
��3
��4
��sen
𝜆senGexh(s)
Figure 2: Schematic diagram for the estimation of the individual cylinder AFR.
Because of the fact that (𝑃 − 𝑍)𝑍−1(𝑃 − 𝑍) ≥ 0, we have−𝑃𝑍−1𝑃 ≤ 𝑍 − 2𝑃. Therefore, condition (10) can guarantee
𝑊ΤΠ𝑊 < 0; then (18) holds.The estimation of the AFR 𝜆
𝑐at the exhaust confluence
point can be obtained according to observer (9). In order toobtain the AFR of each cylinder, the relationship between theAFR of each cylinder and the AFR at the exhaust confluencepoint is analyzed in the following.
The combusted gas of each cylinder is discharged intothe corresponding exhaust port and flows to the exhaustconfluence point in the exhaust manifold, in which weassume that exhaust gas mixing in the individual exhaustrunner can be neglected. Hence, the AFR in the exhaustrunner is constant during one engine cycle, and the AFR 𝜆
𝑐
at the exhaust confluence point in the 𝑘th engine cycle can begiven by [15]
𝜆𝑐(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠)
=∑𝑖
𝑗=1��𝑐𝑗(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠) 𝜆𝑗 (𝑘)
∑4
𝑙=1��𝑐𝑙(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠)
+∑4
𝑗=1��𝑐𝑗(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠) 𝜆𝑗 (𝑘 − 1)
∑4
𝑙=1��𝑐𝑙(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠)
,
(20)
where ��𝑐𝑖is the exhaust air mass flow in the 𝑖th exhaust
manifold passing through the confluence point and 𝜆𝑖is the
AFR in the 𝑖th cylinder. Furthermore, under the assumptionthat airmass aspirated into cylinders in each cycle is constant,exhaust air flowhas the same shape between successive cycles;then a periodic function can be obtained:
𝛾𝑖𝑗 (𝑘) =
��𝑐𝑗(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠)
∑4
𝑙=1��𝑐𝑙(𝑘𝑇𝑐+ (𝑖 − 1) 𝑇𝑠)
=��𝑐𝑗((𝑖 − 1) 𝑇𝑠)
∑4
𝑙=1��𝑐𝑙((𝑖 − 1) 𝑇𝑠)
.
(21)
Therefore, the gas mixing behavior (20) can be rewrittenin the 𝑇
𝑠domain as
𝜆𝑐 (𝑙) =
3
∑
𝑖=0
𝛾[𝑙][𝑙−𝑖]
𝜆[𝑙−𝑖] (𝑙 − 𝑖) , (22)
where [𝑙] = (𝑖 mod 4) + 1. The relationship between the AFRof each cylinder and the AFR at the exhaust confluence pointcan be obtained by (22).
The algorithm to estimate the individual cylinder AFR isas follows: First, the AFR 𝜆
𝑐at the exhaust confluence point
is obtained according to observer (9). Then, the individualcylinder AFR can be calculated through (22). With thecombination of (9) and (22), the method for the estimationof each cylinder AFR can be given as follows:
�� (𝑙 + 1) = 𝐴�� (𝑙) + 𝐿 (𝑦 (𝑙) − 𝐶�� (𝑙 − 𝑚)) ,
��𝑐 (𝑙) = (0 0 1) ⋅ �� (𝑙) ,
��[𝑙] (𝑙) =
1
𝛾[𝑙][𝑙]
(−
3
∑
𝑖=1
(𝛾[𝑙][𝑙−𝑖]
⋅ ��[𝑙−𝑖] (𝑙 − 𝑖)) + ��𝑐 (𝑙)) .
(23)
4. Simulation Studies
In this section, the simulation study of the estimation of theindividual cylinder AFR is presented in the environment ofa 2.0 L 4-cylinder SI gasoline engine from enDYNA [18, 19].The enDYNA is a professional software tool for the real-timesimulation of internal combustion engines, providing ready-to-usemodels for all common engine types comprising crankangle synchronous combustion, gas path, fuel system, coolingsystem, drivetrain, driver, and soft-ECU.The R4-cylinder SI-engine is an example in enDYNA to simulate a 4-cylinder SIgasoline engine, whose specifications are given in Table 1.Theobserver architecture is illustrated in Figure 2.

6 Journal of Sensors
0.998
1
#1 A
FR
0.998
1
#2 A
FR
0.998
1
#3 A
FR
0.998
1
#4 A
FR
enDYNAEstimated
enDYNAEstimated
enDYNAEstimated
enDYNAEstimated
5 10 15 20 250t (s)
5 10 15 20 250t (s)
5 10 15 20 250t (s)
5 10 15 20 250t (s)
5 10 15 20 250t (s)
0102030
uth
(deg
)
Figure 3: Individual cylinder AFR estimation results.
Table 1: Engine specifications.
Fuel system Direct injectionDisplacement (m3) 0.002Intake manifold volume (m3) 0.004Exhaust manifold volume (m3) 0.0015Max engine speed (rad/s) 785
The parameters of the system dynamics in the exhaustpipe (2) and the gas mixing (22) are presented as follows [15]:
𝜏mix = 0.01 s,
𝜏sen = 0.12 s,
×10−3
×10−3
×10−3
×10−3
−1
0
1
#1 er
ror
−1
0
1
#2 er
ror
−1
0
1
#3 er
ror
−1
0
1#4
erro
r
5 10 15 20 250t (s)
5 10 15 20 250t (s)
5 10 15 20 250t (s)
5 10 15 20 250t (s)
Figure 4: Evolution of the estimation error.
𝑚 = 1,
𝑇𝑐= 0.08 s,
𝑇𝑠= 0.02 s,
Γ = (
0.55 0.05 0.15 0.25
0.25 0.6 0.05 0.1
0.15 0.25 0.5 0.1
0.05 0.1 0.15 0.7
) .
(24)
Then, the system matrix can be obtained:
𝐴 = (
0.1353 0 1
0 0.8465 1
0 0 1
) ,
𝐶 = (−0.0786 0.1675 0) .
(25)
According to the inequality (10), the gain matrix can begiven by 𝐿 = (0.97 3.79 0.73)𝑇.
Here, the input of the throttle angle in enDYNA isdesigned as a step signal presented in Figure 3. Accordingly,the estimation results of the individual cylinder AFR by theproposed method are shown in Figure 3, and the estimationerrors are plotted in Figure 4. When the throttle changes

Journal of Sensors 7Ve
hicle
vel
ocity
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
×104
0
5
10
0
2000
4000
ne
(r/m
in)
0
20
40uth
(deg
)
0
20
40
60
(km
/h)
pim
(Pa)
Figure 5: Evolution of throttle angle 𝑢th, engine speed 𝑛𝑒, intake
manifold pressure 𝑝im, and vehicle velocity under ECE cycle.
suddenly, the estimation errors of the individual cylinderAFR are about 0.06%, and then the steady state errors tendto decay within 0.01%.
In order to verify the effectiveness of the proposedmethod under driving cycle condition, one segment of theurban driving cycle ECE (EconomicCommission for Europe)is used [19], under which the throttle angle 𝑢th, enginespeed 𝑛
𝑒, intake manifold pressure 𝑝im, and vehicle velocity
are plotted in Figure 5. Accordingly, the comparison of theindividual cylinder AFR estimation between the proposedmethod and the input observer in [15] are presented inFigure 6, and the estimation errors are plotted in Figure 7.Clearly, the error of the proposed method is smaller thanthe input observer when the AFR changes slowly, in whichthe steady state error of the input observer is 0.03%. Whenthe AFR changes severely, there exist fluctuations of the AFRestimation error from both the proposed method and inputobserver in [15]. However, the estimation error from theproposed method is smaller. It is demonstrating that theproposed method considering time delay can improve theaccuracy of the individual cylinder AFR estimation.
enDYNAInput observerTime delay observer
enDYNAInput observerTime delay observer
enDYNAInput observerTime delay observer
enDYNAInput observerTime delay observer
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
0.998
0.999
1
#1 A
FR
0.998
0.999
1
1.001
#2 A
FR
0.998
0.999
1
1.001#3
AFR
0.998
0.999
1
1.001
#4 A
FR
Figure 6: Individual cylinder AFR estimation results of the pro-posed method and unknown input observer under ECE cycle.
5. Conclusion
An efficient method for the estimation of the individualcylinder AFR with a single UEGO sensor was developed toimprove the estimation accuracy. The system dynamics inthe exhaust pipe was described as an augmented discretesystem with output delay, in which the AFR at confluencepoint was augmented as a system state and beneficial to beestimated comparing the system with input delay. Then, anobserver for the augmented system with output delay wasdesigned to estimate the AFR at confluence point, whichcan avoid accurately inverting the engine model includingdelays. Using the gas mixing model, a method to estimate

8 Journal of Sensors
Input observerTime delay observer
Input observerTime delay observer
Input observerTime delay observer
Input observerTime delay observer
×10−3
×10−3
×10−3
×10−3
−1
0
1
#4 er
ror
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
50 100 150 2000t (s)
−1
0
1
#1 er
ror
−1
0
1
#2 er
ror
−1
0
1
#3 er
ror
Figure 7: Evolution of the estimation error of the proposed methodand unknown input observer.
the individual cylinder AFR based on the proposed observerwas presented. The performance of the proposed methodwas validated by the simulation data from engine softwareenDYNA provided by Tesis, and a comparison with existingmethod was obtained during ECE cycle, demonstrating thatthe proposed method considering time delay from exhaustgas transport and UEGO sensor dynamics can improve theaccuracy of the individual cylinder AFR estimation.
Competing Interests
The authors declare that they have no competing interests.
Acknowledgments
This work was supported by China Automobile IndustryInnovation and Development Joint Fund (no. U1564213).
References
[1] J. B. Heywood, Internal Combustion Engine Fundamentals, vol.930, McGraw-Hill, New York, NY, USA, 1988.
[2] J. W. Grizzle, K. L. Dobbins, and J. A. Cook, “Individualcylinder air-fuel ratio control with a single EGO sensor,” IEEETransactions onVehicular Technology, vol. 40, no. 1, pp. 280–286,1991.
[3] J. Chauvin, P.Moulin, G. Corde, N. Petit, and P. Rouchon, “Real-time nonlinear individual cylinder air fuel ratio observer on adiesel engine test bench,” in Proceedings of the 16th TriennialWorld Congress of International Federation of Automatic Control(IFAC ’05), pp. 194–199, Prague, Czech Republic, July 2005.
[4] J. Chauvin, P. Moulin, G. Corde, N. Petit, and P. Rouchon,“Kalman filtering for real-time individual cylinder air fuel ratioobserver on a diesel engine test bench,” in Proceedings of theAmerican Control Conference, pp. 1886–1891, IEEE, Minneapo-lis, Minn, USA, June 2006.
[5] J. Chauvin, N. Petit, and P. Rouchon, “Six degrees crankshaftindividual air fuel ratio estimation of diesel engines for cylinderbalancing purpose,” Sae Technical Papers, 2006.
[6] Y. Liu and T. Shen, “Modeling and experimental validation ofair-fuel ratio under individual cylinder fuel injection in gasolineengines,” IEEJ Journal of Industry Applications, vol. 1, no. 3, pp.155–163, 2012.
[7] J. F. Burkhard, “Individual cylinder fuel control for a tur-bocharged engine,” SAE Technical Paper 0148-7191, SAE Inter-national, 2014.
[8] H. Li, Y. Huang, G. Li, and Y. Yang, “Research on the cylinder-by-cylinder variations detection and control algorithm of dieselengine,” SAE Technical Paper 0148-7191, 2015.
[9] S. Nakagawa, A. Numata, and T. Hori, “Individual cylindercontrol for air-fuel ratio cylinder imbalance,” SAE TechnicalPaper 2015-01-1624, 2015.
[10] M. Kassa, C. Hall, A. Ickes, and T. Wallner, “In-cylinder oxygenmass fraction estimation method for minimizing cylinder-to-cylinder variations,” SAE Technical Paper 0148-7191, 2015.
[11] N. Qiao, C. Krishnamurthy, and N. Moore, “Determine air-fuelratio imbalance cylinder identification with an oxygen sensor,”SAE International Journal of Engines, vol. 8, no. 3, pp. 1005–1011,2015.
[12] K. Suzuki, T. Shen, J. Kako, and S. Yoshida, “Individual A/Festimation and control with the fuel-gas ratio for multicylinderIC engines,” IEEE Transactions on Vehicular Technology, vol. 58,no. 9, pp. 4757–4768, 2009.
[13] L. Benvenuti, M. D. Di Benedetto, S. Di Gennaro, andA. Sangiovanni-Vincentelli, “Individual cylinder characteristicestimation for a spark injection engine,”Automatica, vol. 39, no.7, pp. 1157–1169, 2003.
[14] J. Chauvin, G. Corde, P.Moulin, N. Petit, and P. Rouchon, “Highfrequency individual cylinder estimation for control of dieselengines,” Oil and Gas Science & Technology, vol. 61, no. 1, pp.57–72, 2006.
[15] B. He, T. Shen, J. Kako, and M. Ouyang, “Input observer-basedindividual cylinder air-fuel ratio control: modelling, design andvalidation,” IEEE Transactions on Control Systems Technology,vol. 16, no. 5, pp. 1057–1065, 2008.
[16] W.-A. Zhang and L. Yu, “Stability analysis for discrete-timeswitched time-delay systems,” Automatica, vol. 45, no. 10, pp.2265–2271, 2009.

Journal of Sensors 9
[17] S. P. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, LinearMatrix Inequalities in System and Control Theory, vol. 15, SIAM,1994.
[18] TESIS DYNAware, en-DYNA� THERMOS� 2.0 Block ReferenceManual, 2006.
[19] T. DYNAware, en-DYNA� THERMOS� 2.0 User Manual, 2006.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of