Embed Size (px)
Citation preview

Research ArticleBearing Fault Diagnosis Based on Deep Belief Network andMultisensor Information Fusion
Jie Tao12 Yilun Liu13 and Dalian Yang14
1School of Mechanical and Electrical Engineering Central South University Changsha 410083 China2Key Laboratory of Knowledge Processing and Networked Manufacturing Hunan University of Science and TechnologyXiangtan 411201 China3Light Alloy Research Institute Central South University Changsha 410083 China4Hunan Provincial Key Laboratory of Health Maintenance for Mechanical Equipment Hunan University of Science and TechnologyXiangtan 411201 China
Correspondence should be addressed to Jie Tao caroltaojie126com
Received 20 April 2016 Revised 3 August 2016 Accepted 11 August 2016
Academic Editor Ganging Song
Copyright copy 2016 Jie Tao et al This is an open access article distributed under the Creative Commons Attribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
In the rolling bearing fault diagnosis the vibration signal of single sensor is usually nonstationary and noisy which contains verylittle useful information and impacts the accuracy of fault diagnosis In order to solve the problem this paper presents a novelfault diagnosis method using multivibration signals and deep belief network (DBN) By utilizing the DBNrsquos learning ability theproposed method can adaptively fuse multifeature data and identify various bearing faults Firstly multiple vibration signals areacquainted from various fault bearings Secondly some time-domain characteristics are extracted from original signals of eachindividual sensor Finally the features data of all sensors are put into theDBNand generate an appropriate classifier to complete faultdiagnosis In order to demonstrate the effectiveness of multivibration signals experiments are carried out on the individual sensorwith the same conditions and procedure At the same time the method is compared with SVM KNN and BPNN methods Theresults show that the DBN-based method is able to not only adaptively fuse multisensor data but also obtain higher identificationaccuracy than other methods
1 Introduction
Bearing is one of the critical components which has a broadrange of application in mechanical equipment Due to theoverload fatigue wear corrosion and other reasons bearingis easily damaged in the process of machine operationAs a matter of fact more than 50 of rotating machinemalfunctions are related to bearing faults [1 2] Actually arolling bearing fault may lead to equipment intense shakingapparatus shutdown stopping producing and even casual-ties In general the early weak fault of bearing is complicatedand hard to detect [3 4] Therefore bearing state monitoringand analysis is very important in which it can discoverearly weak fault of the bearing and control the fault damagesituation in time
Recently fault detection and diagnosis of bearing hasbeen attracting considerable attention Among all the kinds
of bearing fault diagnosis methods vibration signal anal-ysis is one of the most principal and useful tools [2]In vibration-based bearing fault diagnosis there are twokinds of approaches that have been proven effective tofault diagnosis signal processing and pattern recognition[1 3] Conventional signal processing techniques such asfast Fourier transform (FFT) wavelet transforms (WT) andempirical mode decomposition (EMD) have been applied tobearing fault diagnosis and achieved some effectiveness [56] For pattern recognition approaches artificial intelligenceand machine learning are extensively used and studied forexample fuzzy logic support vector machine (SVM) andartificial neural network (NN) [7 8] However most researchonly focused on single vibration analysis in bearing faultdiagnosis In fact when using a single sensor vibration thefault characteristics are very weak and useful information islimited So it requires intricate signal processing and feature
Hindawi Publishing CorporationShock and VibrationVolume 2016 Article ID 9306205 9 pageshttpdxdoiorg10115520169306205
2 Shock and Vibration
Visible layer
Hidden layer
BPNN
RBM
RBM
RBM
RBM
middot middot middot
middot middot middot
middot middot middot
middot middot middot middot middot middot
middot middot middot
middot middot middot
h1 h2 hj hn
1 im
2 2 2
1 1 1
n n n
ij
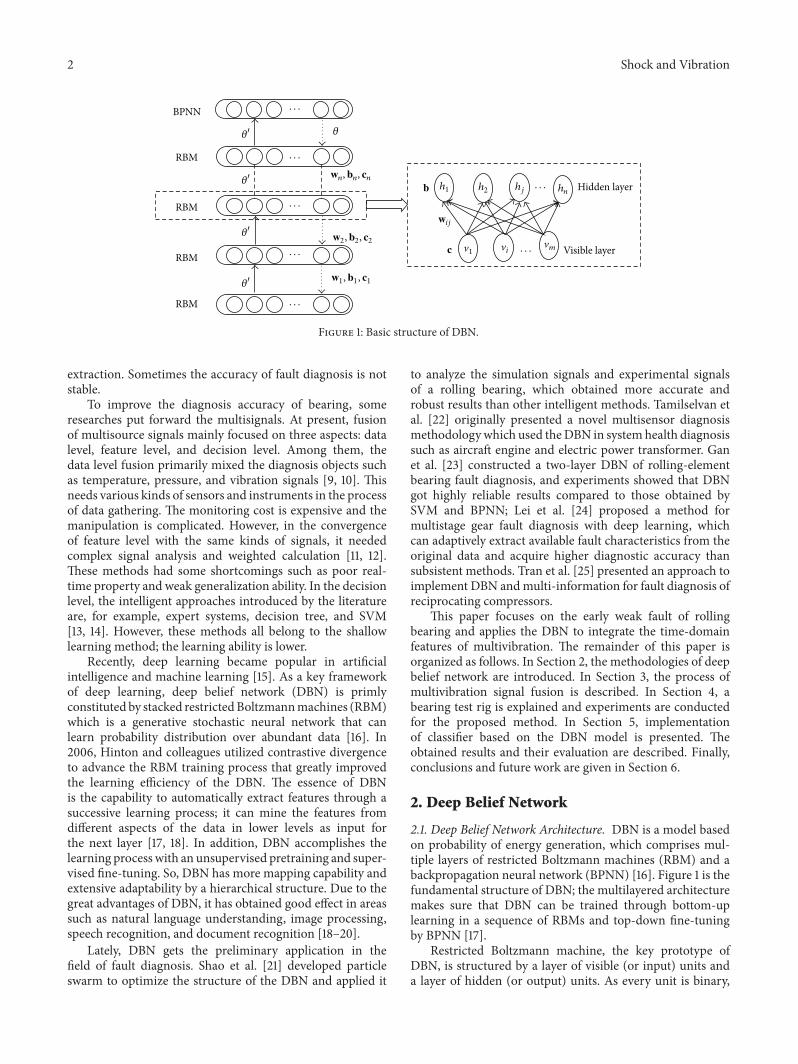
Figure 1 Basic structure of DBN
extraction Sometimes the accuracy of fault diagnosis is notstable
To improve the diagnosis accuracy of bearing someresearches put forward the multisignals At present fusionof multisource signals mainly focused on three aspects datalevel feature level and decision level Among them thedata level fusion primarily mixed the diagnosis objects suchas temperature pressure and vibration signals [9 10] Thisneeds various kinds of sensors and instruments in the processof data gathering The monitoring cost is expensive and themanipulation is complicated However in the convergenceof feature level with the same kinds of signals it neededcomplex signal analysis and weighted calculation [11 12]These methods had some shortcomings such as poor real-time property and weak generalization ability In the decisionlevel the intelligent approaches introduced by the literatureare for example expert systems decision tree and SVM[13 14] However these methods all belong to the shallowlearning method the learning ability is lower
Recently deep learning became popular in artificialintelligence and machine learning [15] As a key frameworkof deep learning deep belief network (DBN) is primlyconstituted by stacked restrictedBoltzmannmachines (RBM)which is a generative stochastic neural network that canlearn probability distribution over abundant data [16] In2006 Hinton and colleagues utilized contrastive divergenceto advance the RBM training process that greatly improvedthe learning efficiency of the DBN The essence of DBNis the capability to automatically extract features through asuccessive learning process it can mine the features fromdifferent aspects of the data in lower levels as input forthe next layer [17 18] In addition DBN accomplishes thelearning process with an unsupervised pretraining and super-vised fine-tuning So DBN has more mapping capability andextensive adaptability by a hierarchical structure Due to thegreat advantages of DBN it has obtained good effect in areassuch as natural language understanding image processingspeech recognition and document recognition [18ndash20]
Lately DBN gets the preliminary application in thefield of fault diagnosis Shao et al [21] developed particleswarm to optimize the structure of the DBN and applied it
to analyze the simulation signals and experimental signalsof a rolling bearing which obtained more accurate androbust results than other intelligent methods Tamilselvan etal [22] originally presented a novel multisensor diagnosismethodologywhich used theDBN in systemhealth diagnosissuch as aircraft engine and electric power transformer Ganet al [23] constructed a two-layer DBN of rolling-elementbearing fault diagnosis and experiments showed that DBNgot highly reliable results compared to those obtained bySVM and BPNN Lei et al [24] proposed a method formultistage gear fault diagnosis with deep learning whichcan adaptively extract available fault characteristics from theoriginal data and acquire higher diagnostic accuracy thansubsistent methods Tran et al [25] presented an approach toimplement DBN andmulti-information for fault diagnosis ofreciprocating compressors
This paper focuses on the early weak fault of rollingbearing and applies the DBN to integrate the time-domainfeatures of multivibration The remainder of this paper isorganized as follows In Section 2 the methodologies of deepbelief network are introduced In Section 3 the process ofmultivibration signal fusion is described In Section 4 abearing test rig is explained and experiments are conductedfor the proposed method In Section 5 implementationof classifier based on the DBN model is presented Theobtained results and their evaluation are described Finallyconclusions and future work are given in Section 6
2 Deep Belief Network
21 Deep Belief Network Architecture DBN is a model basedon probability of energy generation which comprises mul-tiple layers of restricted Boltzmann machines (RBM) and abackpropagation neural network (BPNN) [16] Figure 1 is thefundamental structure of DBN the multilayered architecturemakes sure that DBN can be trained through bottom-uplearning in a sequence of RBMs and top-down fine-tuningby BPNN [17]
Restricted Boltzmann machine the key prototype ofDBN is structured by a layer of visible (or input) units anda layer of hidden (or output) units As every unit is binary
Shock and Vibration 3
it is trained by the activation probabilities The units in thesame layer are not connected to each other but have directedsymmetrical connections to the units in the next layer InDBN the hidden layer of the RBM becomes the visible layerof the next RBM so they set up a successive hierarchy bystacked RBMs
In RBM the visible node is denoted by V119894and the hidden
node is represented by ℎ119895 The weights between V
119894and ℎ
119895are
directed and denoted by w119894119895 The visible and hidden nodes
have their biases represented by vectors c and b respectivelyb119894 c119895 and w
119894119895of all RBMs make up the parameter set 120579 in
DBN As the values of 120579 define a probability distribution overthe joint states of the visible and hidden nodes by an energyfunction
119864 (k h) = minus
119898
sum
119894=1
V119894c119894minus
119899
sum
119895=1
ℎ119895b119895minus
119898
sum
119894=1
119899
sum
119895=1
V119894ℎ119895w119894119895 (1)
The ultimate purpose of DBN training is to find the best120579 which can minimize the model energy error and makethe model at an equilibrium state So the energy function isutilized to define the joint probability distribution between vand h as follows
119875 (k h | 120579) =1
119885 (120579)119890minus119864(kh|120579)
119885 (120579) = sum
kh119890minus119864(kh|120579)
(2)
Since DBN has no intralayer connections the conditionalprobability distributions of visible and hidden nodes can becalculated by
119875 (V119894= 1 | h) = 1
1 + exp (minusb119894minus sum119895ℎ119895w119894119895) (3)
119875 (ℎ119894= 1 | k) =
1
1 + exp (minusc119895minus sum119894V119894w119894119895) (4)
22 The DBN Training Process Generally the DBN trainingprocedure includes two parts pretraining and fine-tuningThe pretraining is an unsupervised learning procedure whichused the unlabeled data to train the individual RBM Thefine-tuning is a supervised learning processwhich utilized thebackpropagation algorithm to further adjust the parameters
In the pretraining each layer is trained by the RBM rulesSince the RBM model is with binary units it can be learnedby stochastic gradient descent on the negative log-likelihoodprobability of the training data The functions are as follows
120597 ln119901 (k 120579)120597w119894119895
= ⟨V119894ℎ119895⟩119889minus ⟨V119894ℎ119895⟩119898
120597 ln119901 (k 120579)120597b
= ⟨ℎ119895⟩119889minus ⟨ℎ119895⟩119898
120597 ln119901 (k 120579)120597c
= ⟨V119894⟩119889minus ⟨V119894⟩119898
(5)
where ⟨⟩119889denotes an expectation of the data distribution
and ⟨⟩119898is an expectation of the distribution defined by the
modelWith the RBMproperty it is easy to compute an unbiased
sample of ⟨⟩119889to the data distribution However obtaining
an unbiased sample of ⟨⟩119898is quite difficult [23] Actually
the RBM learning method closely approximates the gradientobjective function called contrastive divergence (CD) [17] inwhich ⟨⟩
119898is substituted by 119896 iterations of Gibbs sampling
as expressed in (6) where an iteration of alternating Gibbssampling includes updating all parallel visible nodes by using(3) subsequently updating all parallel hidden nodes by (4)
120597 ln119901 (k 120579)120597w119894119895
asymp ⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩119896
120597 ln119901 (k 120579)120597b
asymp ⟨ℎ119895⟩0
minus ⟨ℎ119895⟩119896
120597 ln119901 (k 120579)120597c
asymp ⟨V119894⟩0minus ⟨V119894⟩119896
(6)
Actually one-step Gibbs sampling has been shown toperform surprisingly well [17] Based on (6) the updatedmethods for all parameters are given by the following equa-tion where 120590 represents learning rate whose value is between0 and 1
Δw larr997888 120590(⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
Δb larr997888 120590(⟨ℎ119895⟩0
minus ⟨ℎ119895⟩1
)
Δc larr997888 120590(⟨V119894⟩0minus ⟨V119894⟩1)
(7)
In the training process dataset is usually divided intominibatches with a small number of data vectors and thevalues of 120579 are updated after handling each minibatch Tostabilize the RBM learning procedure a momentum (120582) isoften utilized in updating the synaptic weights and biasesWith momentum (120582) the 120579 update at the current epoch canbe associated with the 120579 update in the preceding epoch andcalculated as
w119899larr997888 120582w
119899minus1+ 120590 (⟨V
119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
b119899larr997888 120582b
119899minus1+ 120590 (⟨ℎ
119895⟩0
minus ⟨ℎ119895⟩1
)
c119899larr997888 120582c
119899minus1+ 120590 (⟨V
119894⟩0minus ⟨V119894⟩1)
(8)
After the bottom-up successive learning the followingstep of the DBN training is top-down fine-tuning Fine-tuning is a supervised learning process which used thebackpropagation (BPNN) to further decrease the trainingerror and advance the classification accuracy of the DBNAs the BPNN is supervised learning fine-tuning uses labeleddata for the DBN training Unlike the unsupervised trainingin DBN that only deals one RBM at a time the BPNNsimultaneously trains all layers in DBNThe training error ofBPNN is calculated with model outputs and the target labeldata And the backpropagation learning is continued until themodel output attains the maximum number of epochs
4 Shock and Vibration
Vibrating sensor 1
Vibrating sensor 2
Vibrating sensor n
Signal acquisition
Primitive character 1
Feature extraction
Primitive character 2
Primitive character n
Deep belief network
Information fusion
Training
Test
Classifier
Diagnosis results
Fault recognition
middot middot middotmiddot middot middot
Figure 2 The flow diagram of multisensor information fusion
3 Multisignal Fusion with DBN
Multisensor information fusion technology can obtain moreaccurate rich fault features from vibration signals [12]However in the conventional information integration sig-nal processing needs to master a lot of signal processingtechnologies and to be combined with rich experience inengineering practice to extract fault features Meanwhilein the pattern recognition traditional machine learningonly contains single nonlinear transform structure it cannotadaptively integrate the multi-information [20 26]
In this paper we apply the deep belief network (DBN)to adaptively fuse multivibrations There are four mainprocesses in the proposed bearing multichannel signalacquisition feature extraction information fusion and faultrecognition
As shown in Figure 2 firstly the vibration signals areacquainted by each sensor Secondly some time-domaincharacteristics are extracted from original signal of everyindividual sensor Thirdly without any artificial selectionfeatures data of all signal sensors are put into the DBN andgenerate appropriate DBN classifier Finally the integratedinformation is used to train or test the classifier and then theclassifier puts out the diagnosis results and completes faultdiagnosis
Since the DBN has a hierarchical structure which canextract the features from various aspects of the data by alayer-by-layer successive learning procedure [17] the multi-information fusion based on deep belief network can getrid of complex signal processing and complicated experience[24] It takes the unsupervised learning with RBM anddirectly extracts feature from the multivibrations and thenuses the best parameters to design DBN and completes themulti-information integration
However the structure of DBN is closely related to thenumber of hidden nodes and hidden layers if the DBN struc-ture is too simple learning ability is so poor that it cannoteffectively integrate the multi-information Meanwhile if theDBN structure is too complicated it not only wastes runningtime but also produces problems such as overfitting localextremism and training failure [26] Therefore a methodbased on data reconstruction error is used to determine thestructure of information fusion in DBN
Figure 3 introduces the optimization process for the DBNstructure The reconstruct error is computed with the modeloutputs and the objective label data At the beginning of theprocedure multichannel signal information is put into the
Multichannel signal information
Initialize the parameters M L and 120576
Train network using RBM learning rule
Reconstruction
No
Yes
Use the best parameter to design the DBN
Yes
YesNo
No
m + 1
n + 1
m lt M
n lt L
error lt 120576
Figure 3 The flow chart of the optimization DBN in signal fusion
DBN and the parameters of119872 119871 and 120576 are initialized wherethe 119872 119871 and 120576 are the max values of the hidden nodeshidden layers and reconstruction error respectively ThenDBNcalculates the reconstruction error of training dataset byRBM learning rules If the reconstruction error is less than 120576it finishes the optimization and puts out the parameters (120579) ofDBN Otherwise it increases the number of hidden nodes orhidden layers If the numbers overflow119872 or 119871 the procedurefinds the best reconstruction error from history and buildsthe DBN for multi-information fusion
Table 1 summarizes the procedure of bearing fault diag-nosis using multi-information fusion with DBN As shownin the table the first step is gating the vibration signalsfrom multichannels and collecting vibration data from eachsensor As the raw samples are nonlinear and unstable it isnecessary to extract some features from each sample Thenthe preprocessed vibration data are divided into trainingand testing datasets The DBN structure is optimized byreconstruction error of training dataset and obtains thesuitable DBN to accomplish the multi-information fusion
Shock and Vibration 5
Motor Timing belt pulley
CouplingSupport abutment
Load device
Bearing pedestal
Rotation axis
(a)
S1
S2
S3
(b)
Figure 4 Rotating machinery fault simulation platform of QPZ-II (a) experiment platform (b) sensors locations
Table 1 Procedure for bearing fault diagnosis using multi-informa-tion with DBN
Step DescriptionStep 1 Gather multichannel vibration signalsStep 2 Extract features of each channel sample
Step 3 Input all features of training samples and initialparameters of the DBN
Step 4
Optimize the DBN structure using reconstructionerror of multi-information fusion(1) Each layer of the DBN is trained using RBMlearning rule(2) Fine-tune the DBN using backpropagationlearning(3) Calculate the reconstruction error using modeloutputs and the target label data(4) If the reconstruction error is smaller than 120576output the DBN structure otherwise119898 larr 119898 + 1
and return to step (1)(5) If the reconstruction error is not smaller than 120576and119898 = 119872 119897 larr 119897 + 1 and return to step (1) until 119897 ismore than 119899
Step 5 Develop the DBN using the structure with the bestreconstruction error
Step 6 Perform diagnosis using the training DBN classifiermodel
4 Experimental Setup
In order to measure the validity of the suggested method abearing experimental platform is set up as shown in Figure 4The bearing fault simulation platform was produced by QianPeng Company with QPZ-II in China
As shown in Figure 4 the experimental table is mainlyconstituted with motor belt coupling bearing pedestal andso on The bearing is installed in the pedestal and threemagnet acceleration sensors are installed in the pedestallabeled by 119878
1 1198782 and 119878
3 respectively The position of 119878
1
is located on the vertical side of the bearing pedestal 1198782
and 1198783are respectively located on the lateral and front
of the bearing pedestal In the experiments the variety oftypical fault bearings can be installed and dismounted formultivibration collection
The test bearings are produced by Harbin Bearing Man-ufacturing Company China with the bearing designationbeing NU205 which have 13 cylindrical rollers The innerdiameter is 25mm the outer diameter is 52mm and thethickness of the bearing is 15mm As shown in Figure 5four experiments are carried out under each of the followingbearing health conditions the inner race fault outer racefault ball fault and normal All the faults are linear cuttingwith electrical dischargemachining and the cutting diameteris 05mm the cutting depth is 03mm
In the process of testing a variable velocitymotor directlydrives a shaft The belt on the right of the shaft brings alongthe coupling which runs with the same speed of motor In theexperiment the sampling frequency is 10000 hz the bearingspeed is 1200 rpm and the sampling time is 5 seconds
According to the steps shown in Table 1 each experimentcontinuously acquainted 50000 signal points Meanwhile thebearing rotated 100 cycles We select the signal points of arotation cycle to construct a sample So 500 signal pointsconstitute a data sampleThere are four conditions defined forclassification and 400 (100 times 4) training samples in datasetThen we randomly selected 200 samples constituting the testdatasetThe dataset description is shown inTable 2When therolling bearing has local damage it will cause the vibrationsignal mutation The local damage position is different andthe change of the vibration signal usually is not the sameFigure 6 is the amplitudes waveform of rolling bearing indifferent conditions
It is seen from Figure 6 that the vibration signals wave-forms are similar and it is difficult to distinguish the variousfault types of rolling bearings So some time-domain featuresare extracted from the original signals the method is asfollows
(1) 119883119894(119894 = 1 2 119899) is the discrete-time series of the 119894th
sensor and the vibration signals of bearing rotating acycle are 119883
119894= [1199091 1199092 119909
119898] 119898 = (119891 times 60) divide ℎ
6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
2 Shock and Vibration
Visible layer
Hidden layer
BPNN
RBM
RBM
RBM
RBM
middot middot middot
middot middot middot
middot middot middot
middot middot middot middot middot middot
middot middot middot
middot middot middot
h1 h2 hj hn
1 im
2 2 2
1 1 1
n n n
ij
Figure 1 Basic structure of DBN
extraction Sometimes the accuracy of fault diagnosis is notstable
To improve the diagnosis accuracy of bearing someresearches put forward the multisignals At present fusionof multisource signals mainly focused on three aspects datalevel feature level and decision level Among them thedata level fusion primarily mixed the diagnosis objects suchas temperature pressure and vibration signals [9 10] Thisneeds various kinds of sensors and instruments in the processof data gathering The monitoring cost is expensive and themanipulation is complicated However in the convergenceof feature level with the same kinds of signals it neededcomplex signal analysis and weighted calculation [11 12]These methods had some shortcomings such as poor real-time property and weak generalization ability In the decisionlevel the intelligent approaches introduced by the literatureare for example expert systems decision tree and SVM[13 14] However these methods all belong to the shallowlearning method the learning ability is lower
Recently deep learning became popular in artificialintelligence and machine learning [15] As a key frameworkof deep learning deep belief network (DBN) is primlyconstituted by stacked restrictedBoltzmannmachines (RBM)which is a generative stochastic neural network that canlearn probability distribution over abundant data [16] In2006 Hinton and colleagues utilized contrastive divergenceto advance the RBM training process that greatly improvedthe learning efficiency of the DBN The essence of DBNis the capability to automatically extract features through asuccessive learning process it can mine the features fromdifferent aspects of the data in lower levels as input forthe next layer [17 18] In addition DBN accomplishes thelearning process with an unsupervised pretraining and super-vised fine-tuning So DBN has more mapping capability andextensive adaptability by a hierarchical structure Due to thegreat advantages of DBN it has obtained good effect in areassuch as natural language understanding image processingspeech recognition and document recognition [18ndash20]
Lately DBN gets the preliminary application in thefield of fault diagnosis Shao et al [21] developed particleswarm to optimize the structure of the DBN and applied it
to analyze the simulation signals and experimental signalsof a rolling bearing which obtained more accurate androbust results than other intelligent methods Tamilselvan etal [22] originally presented a novel multisensor diagnosismethodologywhich used theDBN in systemhealth diagnosissuch as aircraft engine and electric power transformer Ganet al [23] constructed a two-layer DBN of rolling-elementbearing fault diagnosis and experiments showed that DBNgot highly reliable results compared to those obtained bySVM and BPNN Lei et al [24] proposed a method formultistage gear fault diagnosis with deep learning whichcan adaptively extract available fault characteristics from theoriginal data and acquire higher diagnostic accuracy thansubsistent methods Tran et al [25] presented an approach toimplement DBN andmulti-information for fault diagnosis ofreciprocating compressors
This paper focuses on the early weak fault of rollingbearing and applies the DBN to integrate the time-domainfeatures of multivibration The remainder of this paper isorganized as follows In Section 2 the methodologies of deepbelief network are introduced In Section 3 the process ofmultivibration signal fusion is described In Section 4 abearing test rig is explained and experiments are conductedfor the proposed method In Section 5 implementationof classifier based on the DBN model is presented Theobtained results and their evaluation are described Finallyconclusions and future work are given in Section 6
2 Deep Belief Network
21 Deep Belief Network Architecture DBN is a model basedon probability of energy generation which comprises mul-tiple layers of restricted Boltzmann machines (RBM) and abackpropagation neural network (BPNN) [16] Figure 1 is thefundamental structure of DBN the multilayered architecturemakes sure that DBN can be trained through bottom-uplearning in a sequence of RBMs and top-down fine-tuningby BPNN [17]
Restricted Boltzmann machine the key prototype ofDBN is structured by a layer of visible (or input) units anda layer of hidden (or output) units As every unit is binary
Shock and Vibration 3
it is trained by the activation probabilities The units in thesame layer are not connected to each other but have directedsymmetrical connections to the units in the next layer InDBN the hidden layer of the RBM becomes the visible layerof the next RBM so they set up a successive hierarchy bystacked RBMs
In RBM the visible node is denoted by V119894and the hidden
node is represented by ℎ119895 The weights between V
119894and ℎ
119895are
directed and denoted by w119894119895 The visible and hidden nodes
have their biases represented by vectors c and b respectivelyb119894 c119895 and w
119894119895of all RBMs make up the parameter set 120579 in
DBN As the values of 120579 define a probability distribution overthe joint states of the visible and hidden nodes by an energyfunction
119864 (k h) = minus
119898
sum
119894=1
V119894c119894minus
119899
sum
119895=1
ℎ119895b119895minus
119898
sum
119894=1
119899
sum
119895=1
V119894ℎ119895w119894119895 (1)
The ultimate purpose of DBN training is to find the best120579 which can minimize the model energy error and makethe model at an equilibrium state So the energy function isutilized to define the joint probability distribution between vand h as follows
119875 (k h | 120579) =1
119885 (120579)119890minus119864(kh|120579)
119885 (120579) = sum
kh119890minus119864(kh|120579)
(2)
Since DBN has no intralayer connections the conditionalprobability distributions of visible and hidden nodes can becalculated by
119875 (V119894= 1 | h) = 1
1 + exp (minusb119894minus sum119895ℎ119895w119894119895) (3)
119875 (ℎ119894= 1 | k) =
1
1 + exp (minusc119895minus sum119894V119894w119894119895) (4)
22 The DBN Training Process Generally the DBN trainingprocedure includes two parts pretraining and fine-tuningThe pretraining is an unsupervised learning procedure whichused the unlabeled data to train the individual RBM Thefine-tuning is a supervised learning processwhich utilized thebackpropagation algorithm to further adjust the parameters
In the pretraining each layer is trained by the RBM rulesSince the RBM model is with binary units it can be learnedby stochastic gradient descent on the negative log-likelihoodprobability of the training data The functions are as follows
120597 ln119901 (k 120579)120597w119894119895
= ⟨V119894ℎ119895⟩119889minus ⟨V119894ℎ119895⟩119898
120597 ln119901 (k 120579)120597b
= ⟨ℎ119895⟩119889minus ⟨ℎ119895⟩119898
120597 ln119901 (k 120579)120597c
= ⟨V119894⟩119889minus ⟨V119894⟩119898
(5)
where ⟨⟩119889denotes an expectation of the data distribution
and ⟨⟩119898is an expectation of the distribution defined by the
modelWith the RBMproperty it is easy to compute an unbiased
sample of ⟨⟩119889to the data distribution However obtaining
an unbiased sample of ⟨⟩119898is quite difficult [23] Actually
the RBM learning method closely approximates the gradientobjective function called contrastive divergence (CD) [17] inwhich ⟨⟩
119898is substituted by 119896 iterations of Gibbs sampling
as expressed in (6) where an iteration of alternating Gibbssampling includes updating all parallel visible nodes by using(3) subsequently updating all parallel hidden nodes by (4)
120597 ln119901 (k 120579)120597w119894119895
asymp ⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩119896
120597 ln119901 (k 120579)120597b
asymp ⟨ℎ119895⟩0
minus ⟨ℎ119895⟩119896
120597 ln119901 (k 120579)120597c
asymp ⟨V119894⟩0minus ⟨V119894⟩119896
(6)
Actually one-step Gibbs sampling has been shown toperform surprisingly well [17] Based on (6) the updatedmethods for all parameters are given by the following equa-tion where 120590 represents learning rate whose value is between0 and 1
Δw larr997888 120590(⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
Δb larr997888 120590(⟨ℎ119895⟩0
minus ⟨ℎ119895⟩1
)
Δc larr997888 120590(⟨V119894⟩0minus ⟨V119894⟩1)
(7)
In the training process dataset is usually divided intominibatches with a small number of data vectors and thevalues of 120579 are updated after handling each minibatch Tostabilize the RBM learning procedure a momentum (120582) isoften utilized in updating the synaptic weights and biasesWith momentum (120582) the 120579 update at the current epoch canbe associated with the 120579 update in the preceding epoch andcalculated as
w119899larr997888 120582w
119899minus1+ 120590 (⟨V
119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
b119899larr997888 120582b
119899minus1+ 120590 (⟨ℎ
119895⟩0
minus ⟨ℎ119895⟩1
)
c119899larr997888 120582c
119899minus1+ 120590 (⟨V
119894⟩0minus ⟨V119894⟩1)
(8)
After the bottom-up successive learning the followingstep of the DBN training is top-down fine-tuning Fine-tuning is a supervised learning process which used thebackpropagation (BPNN) to further decrease the trainingerror and advance the classification accuracy of the DBNAs the BPNN is supervised learning fine-tuning uses labeleddata for the DBN training Unlike the unsupervised trainingin DBN that only deals one RBM at a time the BPNNsimultaneously trains all layers in DBNThe training error ofBPNN is calculated with model outputs and the target labeldata And the backpropagation learning is continued until themodel output attains the maximum number of epochs
4 Shock and Vibration
Vibrating sensor 1
Vibrating sensor 2
Vibrating sensor n
Signal acquisition
Primitive character 1
Feature extraction
Primitive character 2
Primitive character n
Deep belief network
Information fusion
Training
Test
Classifier
Diagnosis results
Fault recognition
middot middot middotmiddot middot middot
Figure 2 The flow diagram of multisensor information fusion
3 Multisignal Fusion with DBN
Multisensor information fusion technology can obtain moreaccurate rich fault features from vibration signals [12]However in the conventional information integration sig-nal processing needs to master a lot of signal processingtechnologies and to be combined with rich experience inengineering practice to extract fault features Meanwhilein the pattern recognition traditional machine learningonly contains single nonlinear transform structure it cannotadaptively integrate the multi-information [20 26]
In this paper we apply the deep belief network (DBN)to adaptively fuse multivibrations There are four mainprocesses in the proposed bearing multichannel signalacquisition feature extraction information fusion and faultrecognition
As shown in Figure 2 firstly the vibration signals areacquainted by each sensor Secondly some time-domaincharacteristics are extracted from original signal of everyindividual sensor Thirdly without any artificial selectionfeatures data of all signal sensors are put into the DBN andgenerate appropriate DBN classifier Finally the integratedinformation is used to train or test the classifier and then theclassifier puts out the diagnosis results and completes faultdiagnosis
Since the DBN has a hierarchical structure which canextract the features from various aspects of the data by alayer-by-layer successive learning procedure [17] the multi-information fusion based on deep belief network can getrid of complex signal processing and complicated experience[24] It takes the unsupervised learning with RBM anddirectly extracts feature from the multivibrations and thenuses the best parameters to design DBN and completes themulti-information integration
However the structure of DBN is closely related to thenumber of hidden nodes and hidden layers if the DBN struc-ture is too simple learning ability is so poor that it cannoteffectively integrate the multi-information Meanwhile if theDBN structure is too complicated it not only wastes runningtime but also produces problems such as overfitting localextremism and training failure [26] Therefore a methodbased on data reconstruction error is used to determine thestructure of information fusion in DBN
Figure 3 introduces the optimization process for the DBNstructure The reconstruct error is computed with the modeloutputs and the objective label data At the beginning of theprocedure multichannel signal information is put into the
Multichannel signal information
Initialize the parameters M L and 120576
Train network using RBM learning rule
Reconstruction
No
Yes
Use the best parameter to design the DBN
Yes
YesNo
No
m + 1
n + 1
m lt M
n lt L
error lt 120576
Figure 3 The flow chart of the optimization DBN in signal fusion
DBN and the parameters of119872 119871 and 120576 are initialized wherethe 119872 119871 and 120576 are the max values of the hidden nodeshidden layers and reconstruction error respectively ThenDBNcalculates the reconstruction error of training dataset byRBM learning rules If the reconstruction error is less than 120576it finishes the optimization and puts out the parameters (120579) ofDBN Otherwise it increases the number of hidden nodes orhidden layers If the numbers overflow119872 or 119871 the procedurefinds the best reconstruction error from history and buildsthe DBN for multi-information fusion
Table 1 summarizes the procedure of bearing fault diag-nosis using multi-information fusion with DBN As shownin the table the first step is gating the vibration signalsfrom multichannels and collecting vibration data from eachsensor As the raw samples are nonlinear and unstable it isnecessary to extract some features from each sample Thenthe preprocessed vibration data are divided into trainingand testing datasets The DBN structure is optimized byreconstruction error of training dataset and obtains thesuitable DBN to accomplish the multi-information fusion
Shock and Vibration 5
Motor Timing belt pulley
CouplingSupport abutment
Load device
Bearing pedestal
Rotation axis
(a)
S1
S2
S3
(b)
Figure 4 Rotating machinery fault simulation platform of QPZ-II (a) experiment platform (b) sensors locations
Table 1 Procedure for bearing fault diagnosis using multi-informa-tion with DBN
Step DescriptionStep 1 Gather multichannel vibration signalsStep 2 Extract features of each channel sample
Step 3 Input all features of training samples and initialparameters of the DBN
Step 4
Optimize the DBN structure using reconstructionerror of multi-information fusion(1) Each layer of the DBN is trained using RBMlearning rule(2) Fine-tune the DBN using backpropagationlearning(3) Calculate the reconstruction error using modeloutputs and the target label data(4) If the reconstruction error is smaller than 120576output the DBN structure otherwise119898 larr 119898 + 1
and return to step (1)(5) If the reconstruction error is not smaller than 120576and119898 = 119872 119897 larr 119897 + 1 and return to step (1) until 119897 ismore than 119899
Step 5 Develop the DBN using the structure with the bestreconstruction error
Step 6 Perform diagnosis using the training DBN classifiermodel
4 Experimental Setup
In order to measure the validity of the suggested method abearing experimental platform is set up as shown in Figure 4The bearing fault simulation platform was produced by QianPeng Company with QPZ-II in China
As shown in Figure 4 the experimental table is mainlyconstituted with motor belt coupling bearing pedestal andso on The bearing is installed in the pedestal and threemagnet acceleration sensors are installed in the pedestallabeled by 119878
1 1198782 and 119878
3 respectively The position of 119878
1
is located on the vertical side of the bearing pedestal 1198782
and 1198783are respectively located on the lateral and front
of the bearing pedestal In the experiments the variety oftypical fault bearings can be installed and dismounted formultivibration collection
The test bearings are produced by Harbin Bearing Man-ufacturing Company China with the bearing designationbeing NU205 which have 13 cylindrical rollers The innerdiameter is 25mm the outer diameter is 52mm and thethickness of the bearing is 15mm As shown in Figure 5four experiments are carried out under each of the followingbearing health conditions the inner race fault outer racefault ball fault and normal All the faults are linear cuttingwith electrical dischargemachining and the cutting diameteris 05mm the cutting depth is 03mm
In the process of testing a variable velocitymotor directlydrives a shaft The belt on the right of the shaft brings alongthe coupling which runs with the same speed of motor In theexperiment the sampling frequency is 10000 hz the bearingspeed is 1200 rpm and the sampling time is 5 seconds
According to the steps shown in Table 1 each experimentcontinuously acquainted 50000 signal points Meanwhile thebearing rotated 100 cycles We select the signal points of arotation cycle to construct a sample So 500 signal pointsconstitute a data sampleThere are four conditions defined forclassification and 400 (100 times 4) training samples in datasetThen we randomly selected 200 samples constituting the testdatasetThe dataset description is shown inTable 2When therolling bearing has local damage it will cause the vibrationsignal mutation The local damage position is different andthe change of the vibration signal usually is not the sameFigure 6 is the amplitudes waveform of rolling bearing indifferent conditions
It is seen from Figure 6 that the vibration signals wave-forms are similar and it is difficult to distinguish the variousfault types of rolling bearings So some time-domain featuresare extracted from the original signals the method is asfollows
(1) 119883119894(119894 = 1 2 119899) is the discrete-time series of the 119894th
sensor and the vibration signals of bearing rotating acycle are 119883
119894= [1199091 1199092 119909
119898] 119898 = (119891 times 60) divide ℎ
6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 3
it is trained by the activation probabilities The units in thesame layer are not connected to each other but have directedsymmetrical connections to the units in the next layer InDBN the hidden layer of the RBM becomes the visible layerof the next RBM so they set up a successive hierarchy bystacked RBMs
In RBM the visible node is denoted by V119894and the hidden
node is represented by ℎ119895 The weights between V
119894and ℎ
119895are
directed and denoted by w119894119895 The visible and hidden nodes
have their biases represented by vectors c and b respectivelyb119894 c119895 and w
119894119895of all RBMs make up the parameter set 120579 in
DBN As the values of 120579 define a probability distribution overthe joint states of the visible and hidden nodes by an energyfunction
119864 (k h) = minus
119898
sum
119894=1
V119894c119894minus
119899
sum
119895=1
ℎ119895b119895minus
119898
sum
119894=1
119899
sum
119895=1
V119894ℎ119895w119894119895 (1)
The ultimate purpose of DBN training is to find the best120579 which can minimize the model energy error and makethe model at an equilibrium state So the energy function isutilized to define the joint probability distribution between vand h as follows
119875 (k h | 120579) =1
119885 (120579)119890minus119864(kh|120579)
119885 (120579) = sum
kh119890minus119864(kh|120579)
(2)
Since DBN has no intralayer connections the conditionalprobability distributions of visible and hidden nodes can becalculated by
119875 (V119894= 1 | h) = 1
1 + exp (minusb119894minus sum119895ℎ119895w119894119895) (3)
119875 (ℎ119894= 1 | k) =
1
1 + exp (minusc119895minus sum119894V119894w119894119895) (4)
22 The DBN Training Process Generally the DBN trainingprocedure includes two parts pretraining and fine-tuningThe pretraining is an unsupervised learning procedure whichused the unlabeled data to train the individual RBM Thefine-tuning is a supervised learning processwhich utilized thebackpropagation algorithm to further adjust the parameters
In the pretraining each layer is trained by the RBM rulesSince the RBM model is with binary units it can be learnedby stochastic gradient descent on the negative log-likelihoodprobability of the training data The functions are as follows
120597 ln119901 (k 120579)120597w119894119895
= ⟨V119894ℎ119895⟩119889minus ⟨V119894ℎ119895⟩119898
120597 ln119901 (k 120579)120597b
= ⟨ℎ119895⟩119889minus ⟨ℎ119895⟩119898
120597 ln119901 (k 120579)120597c
= ⟨V119894⟩119889minus ⟨V119894⟩119898
(5)
where ⟨⟩119889denotes an expectation of the data distribution
and ⟨⟩119898is an expectation of the distribution defined by the
modelWith the RBMproperty it is easy to compute an unbiased
sample of ⟨⟩119889to the data distribution However obtaining
an unbiased sample of ⟨⟩119898is quite difficult [23] Actually
the RBM learning method closely approximates the gradientobjective function called contrastive divergence (CD) [17] inwhich ⟨⟩
119898is substituted by 119896 iterations of Gibbs sampling
as expressed in (6) where an iteration of alternating Gibbssampling includes updating all parallel visible nodes by using(3) subsequently updating all parallel hidden nodes by (4)
120597 ln119901 (k 120579)120597w119894119895
asymp ⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩119896
120597 ln119901 (k 120579)120597b
asymp ⟨ℎ119895⟩0
minus ⟨ℎ119895⟩119896
120597 ln119901 (k 120579)120597c
asymp ⟨V119894⟩0minus ⟨V119894⟩119896
(6)
Actually one-step Gibbs sampling has been shown toperform surprisingly well [17] Based on (6) the updatedmethods for all parameters are given by the following equa-tion where 120590 represents learning rate whose value is between0 and 1
Δw larr997888 120590(⟨V119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
Δb larr997888 120590(⟨ℎ119895⟩0
minus ⟨ℎ119895⟩1
)
Δc larr997888 120590(⟨V119894⟩0minus ⟨V119894⟩1)
(7)
In the training process dataset is usually divided intominibatches with a small number of data vectors and thevalues of 120579 are updated after handling each minibatch Tostabilize the RBM learning procedure a momentum (120582) isoften utilized in updating the synaptic weights and biasesWith momentum (120582) the 120579 update at the current epoch canbe associated with the 120579 update in the preceding epoch andcalculated as
w119899larr997888 120582w
119899minus1+ 120590 (⟨V
119894ℎ119895⟩0
minus ⟨V119894ℎ119895⟩1
)
b119899larr997888 120582b
119899minus1+ 120590 (⟨ℎ
119895⟩0
minus ⟨ℎ119895⟩1
)
c119899larr997888 120582c
119899minus1+ 120590 (⟨V
119894⟩0minus ⟨V119894⟩1)
(8)
After the bottom-up successive learning the followingstep of the DBN training is top-down fine-tuning Fine-tuning is a supervised learning process which used thebackpropagation (BPNN) to further decrease the trainingerror and advance the classification accuracy of the DBNAs the BPNN is supervised learning fine-tuning uses labeleddata for the DBN training Unlike the unsupervised trainingin DBN that only deals one RBM at a time the BPNNsimultaneously trains all layers in DBNThe training error ofBPNN is calculated with model outputs and the target labeldata And the backpropagation learning is continued until themodel output attains the maximum number of epochs
4 Shock and Vibration
Vibrating sensor 1
Vibrating sensor 2
Vibrating sensor n
Signal acquisition
Primitive character 1
Feature extraction
Primitive character 2
Primitive character n
Deep belief network
Information fusion
Training
Test
Classifier
Diagnosis results
Fault recognition
middot middot middotmiddot middot middot
Figure 2 The flow diagram of multisensor information fusion
3 Multisignal Fusion with DBN
Multisensor information fusion technology can obtain moreaccurate rich fault features from vibration signals [12]However in the conventional information integration sig-nal processing needs to master a lot of signal processingtechnologies and to be combined with rich experience inengineering practice to extract fault features Meanwhilein the pattern recognition traditional machine learningonly contains single nonlinear transform structure it cannotadaptively integrate the multi-information [20 26]
In this paper we apply the deep belief network (DBN)to adaptively fuse multivibrations There are four mainprocesses in the proposed bearing multichannel signalacquisition feature extraction information fusion and faultrecognition
As shown in Figure 2 firstly the vibration signals areacquainted by each sensor Secondly some time-domaincharacteristics are extracted from original signal of everyindividual sensor Thirdly without any artificial selectionfeatures data of all signal sensors are put into the DBN andgenerate appropriate DBN classifier Finally the integratedinformation is used to train or test the classifier and then theclassifier puts out the diagnosis results and completes faultdiagnosis
Since the DBN has a hierarchical structure which canextract the features from various aspects of the data by alayer-by-layer successive learning procedure [17] the multi-information fusion based on deep belief network can getrid of complex signal processing and complicated experience[24] It takes the unsupervised learning with RBM anddirectly extracts feature from the multivibrations and thenuses the best parameters to design DBN and completes themulti-information integration
However the structure of DBN is closely related to thenumber of hidden nodes and hidden layers if the DBN struc-ture is too simple learning ability is so poor that it cannoteffectively integrate the multi-information Meanwhile if theDBN structure is too complicated it not only wastes runningtime but also produces problems such as overfitting localextremism and training failure [26] Therefore a methodbased on data reconstruction error is used to determine thestructure of information fusion in DBN
Figure 3 introduces the optimization process for the DBNstructure The reconstruct error is computed with the modeloutputs and the objective label data At the beginning of theprocedure multichannel signal information is put into the
Multichannel signal information
Initialize the parameters M L and 120576
Train network using RBM learning rule
Reconstruction
No
Yes
Use the best parameter to design the DBN
Yes
YesNo
No
m + 1
n + 1
m lt M
n lt L
error lt 120576
Figure 3 The flow chart of the optimization DBN in signal fusion
DBN and the parameters of119872 119871 and 120576 are initialized wherethe 119872 119871 and 120576 are the max values of the hidden nodeshidden layers and reconstruction error respectively ThenDBNcalculates the reconstruction error of training dataset byRBM learning rules If the reconstruction error is less than 120576it finishes the optimization and puts out the parameters (120579) ofDBN Otherwise it increases the number of hidden nodes orhidden layers If the numbers overflow119872 or 119871 the procedurefinds the best reconstruction error from history and buildsthe DBN for multi-information fusion
Table 1 summarizes the procedure of bearing fault diag-nosis using multi-information fusion with DBN As shownin the table the first step is gating the vibration signalsfrom multichannels and collecting vibration data from eachsensor As the raw samples are nonlinear and unstable it isnecessary to extract some features from each sample Thenthe preprocessed vibration data are divided into trainingand testing datasets The DBN structure is optimized byreconstruction error of training dataset and obtains thesuitable DBN to accomplish the multi-information fusion
Shock and Vibration 5
Motor Timing belt pulley
CouplingSupport abutment
Load device
Bearing pedestal
Rotation axis
(a)
S1
S2
S3
(b)
Figure 4 Rotating machinery fault simulation platform of QPZ-II (a) experiment platform (b) sensors locations
Table 1 Procedure for bearing fault diagnosis using multi-informa-tion with DBN
Step DescriptionStep 1 Gather multichannel vibration signalsStep 2 Extract features of each channel sample
Step 3 Input all features of training samples and initialparameters of the DBN
Step 4
Optimize the DBN structure using reconstructionerror of multi-information fusion(1) Each layer of the DBN is trained using RBMlearning rule(2) Fine-tune the DBN using backpropagationlearning(3) Calculate the reconstruction error using modeloutputs and the target label data(4) If the reconstruction error is smaller than 120576output the DBN structure otherwise119898 larr 119898 + 1
and return to step (1)(5) If the reconstruction error is not smaller than 120576and119898 = 119872 119897 larr 119897 + 1 and return to step (1) until 119897 ismore than 119899
Step 5 Develop the DBN using the structure with the bestreconstruction error
Step 6 Perform diagnosis using the training DBN classifiermodel
4 Experimental Setup
In order to measure the validity of the suggested method abearing experimental platform is set up as shown in Figure 4The bearing fault simulation platform was produced by QianPeng Company with QPZ-II in China
As shown in Figure 4 the experimental table is mainlyconstituted with motor belt coupling bearing pedestal andso on The bearing is installed in the pedestal and threemagnet acceleration sensors are installed in the pedestallabeled by 119878
1 1198782 and 119878
3 respectively The position of 119878
1
is located on the vertical side of the bearing pedestal 1198782
and 1198783are respectively located on the lateral and front
of the bearing pedestal In the experiments the variety oftypical fault bearings can be installed and dismounted formultivibration collection
The test bearings are produced by Harbin Bearing Man-ufacturing Company China with the bearing designationbeing NU205 which have 13 cylindrical rollers The innerdiameter is 25mm the outer diameter is 52mm and thethickness of the bearing is 15mm As shown in Figure 5four experiments are carried out under each of the followingbearing health conditions the inner race fault outer racefault ball fault and normal All the faults are linear cuttingwith electrical dischargemachining and the cutting diameteris 05mm the cutting depth is 03mm
In the process of testing a variable velocitymotor directlydrives a shaft The belt on the right of the shaft brings alongthe coupling which runs with the same speed of motor In theexperiment the sampling frequency is 10000 hz the bearingspeed is 1200 rpm and the sampling time is 5 seconds
According to the steps shown in Table 1 each experimentcontinuously acquainted 50000 signal points Meanwhile thebearing rotated 100 cycles We select the signal points of arotation cycle to construct a sample So 500 signal pointsconstitute a data sampleThere are four conditions defined forclassification and 400 (100 times 4) training samples in datasetThen we randomly selected 200 samples constituting the testdatasetThe dataset description is shown inTable 2When therolling bearing has local damage it will cause the vibrationsignal mutation The local damage position is different andthe change of the vibration signal usually is not the sameFigure 6 is the amplitudes waveform of rolling bearing indifferent conditions
It is seen from Figure 6 that the vibration signals wave-forms are similar and it is difficult to distinguish the variousfault types of rolling bearings So some time-domain featuresare extracted from the original signals the method is asfollows
(1) 119883119894(119894 = 1 2 119899) is the discrete-time series of the 119894th
sensor and the vibration signals of bearing rotating acycle are 119883
119894= [1199091 1199092 119909
119898] 119898 = (119891 times 60) divide ℎ
6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 Shock and Vibration
Vibrating sensor 1
Vibrating sensor 2
Vibrating sensor n
Signal acquisition
Primitive character 1
Feature extraction
Primitive character 2
Primitive character n
Deep belief network
Information fusion
Training
Test
Classifier
Diagnosis results
Fault recognition
middot middot middotmiddot middot middot
Figure 2 The flow diagram of multisensor information fusion
3 Multisignal Fusion with DBN
Multisensor information fusion technology can obtain moreaccurate rich fault features from vibration signals [12]However in the conventional information integration sig-nal processing needs to master a lot of signal processingtechnologies and to be combined with rich experience inengineering practice to extract fault features Meanwhilein the pattern recognition traditional machine learningonly contains single nonlinear transform structure it cannotadaptively integrate the multi-information [20 26]
In this paper we apply the deep belief network (DBN)to adaptively fuse multivibrations There are four mainprocesses in the proposed bearing multichannel signalacquisition feature extraction information fusion and faultrecognition
As shown in Figure 2 firstly the vibration signals areacquainted by each sensor Secondly some time-domaincharacteristics are extracted from original signal of everyindividual sensor Thirdly without any artificial selectionfeatures data of all signal sensors are put into the DBN andgenerate appropriate DBN classifier Finally the integratedinformation is used to train or test the classifier and then theclassifier puts out the diagnosis results and completes faultdiagnosis
Since the DBN has a hierarchical structure which canextract the features from various aspects of the data by alayer-by-layer successive learning procedure [17] the multi-information fusion based on deep belief network can getrid of complex signal processing and complicated experience[24] It takes the unsupervised learning with RBM anddirectly extracts feature from the multivibrations and thenuses the best parameters to design DBN and completes themulti-information integration
However the structure of DBN is closely related to thenumber of hidden nodes and hidden layers if the DBN struc-ture is too simple learning ability is so poor that it cannoteffectively integrate the multi-information Meanwhile if theDBN structure is too complicated it not only wastes runningtime but also produces problems such as overfitting localextremism and training failure [26] Therefore a methodbased on data reconstruction error is used to determine thestructure of information fusion in DBN
Figure 3 introduces the optimization process for the DBNstructure The reconstruct error is computed with the modeloutputs and the objective label data At the beginning of theprocedure multichannel signal information is put into the
Multichannel signal information
Initialize the parameters M L and 120576
Train network using RBM learning rule
Reconstruction
No
Yes
Use the best parameter to design the DBN
Yes
YesNo
No
m + 1
n + 1
m lt M
n lt L
error lt 120576
Figure 3 The flow chart of the optimization DBN in signal fusion
DBN and the parameters of119872 119871 and 120576 are initialized wherethe 119872 119871 and 120576 are the max values of the hidden nodeshidden layers and reconstruction error respectively ThenDBNcalculates the reconstruction error of training dataset byRBM learning rules If the reconstruction error is less than 120576it finishes the optimization and puts out the parameters (120579) ofDBN Otherwise it increases the number of hidden nodes orhidden layers If the numbers overflow119872 or 119871 the procedurefinds the best reconstruction error from history and buildsthe DBN for multi-information fusion
Table 1 summarizes the procedure of bearing fault diag-nosis using multi-information fusion with DBN As shownin the table the first step is gating the vibration signalsfrom multichannels and collecting vibration data from eachsensor As the raw samples are nonlinear and unstable it isnecessary to extract some features from each sample Thenthe preprocessed vibration data are divided into trainingand testing datasets The DBN structure is optimized byreconstruction error of training dataset and obtains thesuitable DBN to accomplish the multi-information fusion
Shock and Vibration 5
Motor Timing belt pulley
CouplingSupport abutment
Load device
Bearing pedestal
Rotation axis
(a)
S1
S2
S3
(b)
Figure 4 Rotating machinery fault simulation platform of QPZ-II (a) experiment platform (b) sensors locations
Table 1 Procedure for bearing fault diagnosis using multi-informa-tion with DBN
Step DescriptionStep 1 Gather multichannel vibration signalsStep 2 Extract features of each channel sample
Step 3 Input all features of training samples and initialparameters of the DBN
Step 4
Optimize the DBN structure using reconstructionerror of multi-information fusion(1) Each layer of the DBN is trained using RBMlearning rule(2) Fine-tune the DBN using backpropagationlearning(3) Calculate the reconstruction error using modeloutputs and the target label data(4) If the reconstruction error is smaller than 120576output the DBN structure otherwise119898 larr 119898 + 1
and return to step (1)(5) If the reconstruction error is not smaller than 120576and119898 = 119872 119897 larr 119897 + 1 and return to step (1) until 119897 ismore than 119899
Step 5 Develop the DBN using the structure with the bestreconstruction error
Step 6 Perform diagnosis using the training DBN classifiermodel
4 Experimental Setup
In order to measure the validity of the suggested method abearing experimental platform is set up as shown in Figure 4The bearing fault simulation platform was produced by QianPeng Company with QPZ-II in China
As shown in Figure 4 the experimental table is mainlyconstituted with motor belt coupling bearing pedestal andso on The bearing is installed in the pedestal and threemagnet acceleration sensors are installed in the pedestallabeled by 119878
1 1198782 and 119878
3 respectively The position of 119878
1
is located on the vertical side of the bearing pedestal 1198782
and 1198783are respectively located on the lateral and front
of the bearing pedestal In the experiments the variety oftypical fault bearings can be installed and dismounted formultivibration collection
The test bearings are produced by Harbin Bearing Man-ufacturing Company China with the bearing designationbeing NU205 which have 13 cylindrical rollers The innerdiameter is 25mm the outer diameter is 52mm and thethickness of the bearing is 15mm As shown in Figure 5four experiments are carried out under each of the followingbearing health conditions the inner race fault outer racefault ball fault and normal All the faults are linear cuttingwith electrical dischargemachining and the cutting diameteris 05mm the cutting depth is 03mm
In the process of testing a variable velocitymotor directlydrives a shaft The belt on the right of the shaft brings alongthe coupling which runs with the same speed of motor In theexperiment the sampling frequency is 10000 hz the bearingspeed is 1200 rpm and the sampling time is 5 seconds
According to the steps shown in Table 1 each experimentcontinuously acquainted 50000 signal points Meanwhile thebearing rotated 100 cycles We select the signal points of arotation cycle to construct a sample So 500 signal pointsconstitute a data sampleThere are four conditions defined forclassification and 400 (100 times 4) training samples in datasetThen we randomly selected 200 samples constituting the testdatasetThe dataset description is shown inTable 2When therolling bearing has local damage it will cause the vibrationsignal mutation The local damage position is different andthe change of the vibration signal usually is not the sameFigure 6 is the amplitudes waveform of rolling bearing indifferent conditions
It is seen from Figure 6 that the vibration signals wave-forms are similar and it is difficult to distinguish the variousfault types of rolling bearings So some time-domain featuresare extracted from the original signals the method is asfollows
(1) 119883119894(119894 = 1 2 119899) is the discrete-time series of the 119894th
sensor and the vibration signals of bearing rotating acycle are 119883
119894= [1199091 1199092 119909
119898] 119898 = (119891 times 60) divide ℎ
6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 5
Motor Timing belt pulley
CouplingSupport abutment
Load device
Bearing pedestal
Rotation axis
(a)
S1
S2
S3
(b)
Figure 4 Rotating machinery fault simulation platform of QPZ-II (a) experiment platform (b) sensors locations
Table 1 Procedure for bearing fault diagnosis using multi-informa-tion with DBN
Step DescriptionStep 1 Gather multichannel vibration signalsStep 2 Extract features of each channel sample
Step 3 Input all features of training samples and initialparameters of the DBN
Step 4
Optimize the DBN structure using reconstructionerror of multi-information fusion(1) Each layer of the DBN is trained using RBMlearning rule(2) Fine-tune the DBN using backpropagationlearning(3) Calculate the reconstruction error using modeloutputs and the target label data(4) If the reconstruction error is smaller than 120576output the DBN structure otherwise119898 larr 119898 + 1
and return to step (1)(5) If the reconstruction error is not smaller than 120576and119898 = 119872 119897 larr 119897 + 1 and return to step (1) until 119897 ismore than 119899
Step 5 Develop the DBN using the structure with the bestreconstruction error
Step 6 Perform diagnosis using the training DBN classifiermodel
4 Experimental Setup
In order to measure the validity of the suggested method abearing experimental platform is set up as shown in Figure 4The bearing fault simulation platform was produced by QianPeng Company with QPZ-II in China
As shown in Figure 4 the experimental table is mainlyconstituted with motor belt coupling bearing pedestal andso on The bearing is installed in the pedestal and threemagnet acceleration sensors are installed in the pedestallabeled by 119878
1 1198782 and 119878
3 respectively The position of 119878
1
is located on the vertical side of the bearing pedestal 1198782
and 1198783are respectively located on the lateral and front
of the bearing pedestal In the experiments the variety oftypical fault bearings can be installed and dismounted formultivibration collection
The test bearings are produced by Harbin Bearing Man-ufacturing Company China with the bearing designationbeing NU205 which have 13 cylindrical rollers The innerdiameter is 25mm the outer diameter is 52mm and thethickness of the bearing is 15mm As shown in Figure 5four experiments are carried out under each of the followingbearing health conditions the inner race fault outer racefault ball fault and normal All the faults are linear cuttingwith electrical dischargemachining and the cutting diameteris 05mm the cutting depth is 03mm
In the process of testing a variable velocitymotor directlydrives a shaft The belt on the right of the shaft brings alongthe coupling which runs with the same speed of motor In theexperiment the sampling frequency is 10000 hz the bearingspeed is 1200 rpm and the sampling time is 5 seconds
According to the steps shown in Table 1 each experimentcontinuously acquainted 50000 signal points Meanwhile thebearing rotated 100 cycles We select the signal points of arotation cycle to construct a sample So 500 signal pointsconstitute a data sampleThere are four conditions defined forclassification and 400 (100 times 4) training samples in datasetThen we randomly selected 200 samples constituting the testdatasetThe dataset description is shown inTable 2When therolling bearing has local damage it will cause the vibrationsignal mutation The local damage position is different andthe change of the vibration signal usually is not the sameFigure 6 is the amplitudes waveform of rolling bearing indifferent conditions
It is seen from Figure 6 that the vibration signals wave-forms are similar and it is difficult to distinguish the variousfault types of rolling bearings So some time-domain featuresare extracted from the original signals the method is asfollows
(1) 119883119894(119894 = 1 2 119899) is the discrete-time series of the 119894th
sensor and the vibration signals of bearing rotating acycle are 119883
119894= [1199091 1199092 119909
119898] 119898 = (119891 times 60) divide ℎ
6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 Shock and Vibration
Table 2 Sample distribution of normal and different faults
Rolling bearing condition Fault diametermm Fault depthmm Training samples Test samplesNormal mdash mdash 100
200Inner race fault 05 03 100Outer race fault 05 03 100Ball fault 05 03 100
(a) (b) (c) (d)
Figure 5 Pictures of the testing bearings (a) inner race fault (b) ball fault (c) outer race fault (d) normal
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(a)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(b)
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
minus01
0
01
(c)
minus01
0
01
0005 001 0015 002 0025 003 00350Time (s)
Am
plitu
dea
(mmiddotsminus
2)
(d)
Figure 6 Instantaneous amplitudes waveform of rolling bearing indifferent conditions (a) normal (b) inner race fault (c) outer racefault (d) ball fault
where 119891 is the sampling frequency (Hz) and ℎ is therotational velocity (rpm)
(2) According to Table 3 compute the time-domainstatistics of the vibration signals 119883
119894and get feature
vector of the 119894th sensor as 119860119894= [1198861 1198862 119886
14]
(3) Three sensors constitute the multisensor feature vec-tor 119879 = [119860
1 1198602 1198603]
(4) Normalize the feature vector119879119894= [1199051 1199052 119905
119898] 119898 =
119899 times 14
5 Results and Discussions
51 Multisignals and Individual Signals As the signals pre-processing is clearly explained in Section 4 14 classical time-domain features are computed from the raw signals
To illustrate the property of multivibrations fusion themethod based on each single sensor is alsomeasured with thesame conditionsThese methods are represented as sensors 12 and 3 corresponding to the three individual sensors Theinput vectors ofDBN in single sensor experiment have only 14features extracted from vibration signalsThe input vectors ofDBN in multisensors have 42 features The DBNsrsquo structuresare shown in Table 4
The DBN structure of multisensors is 42-12-12-4 That isto say the input layer contained 42 nodes and the outputlayer included 4 nodes which depended on the dimensionsof the input and output data There are two hidden layersin the architecture both hidden layers contained 12 hiddenneurons respectively However in sensors 1 2 and 3 the inputnodes are 14 and the hidden nodes are 8 in every hiddenlayer The learning rate and momentum are used to adjustthe model error and training efficiency The learning rate inthe experiment is selected as 001 and the momentum is 002[20] In the sequential training of every individual RBM thepretraining of each RBM is accomplished with 20 iterations
Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 7
Table 3 Statistics features in time domain
Parameter Definition
(1) Average value 119909 1
119899sum119909119894
(2) Maximum value 119909max max (119909119894)
(3) Minimum value 119909min min (119909119894)
(4) Peak-to-peak 119909p max (119909119894) minusmin (119909
119894)
(5) Mean absolute 119909abs1
119899sum
10038161003816100381610038161199091198941003816100381610038161003816
(6) Variance 119909varsum119899
119894=1(119909119894minus 119909)2
119899
(7) Standard deviation 119909std (1
119899 minus 1
119899
sum
119894=1
(119909119894minus 119909)2
)
12
(8) Kurtosis 119909kursum119899
119894=1(119909119894minus 119909)4
(119899 minus 1) 1199094
std
(9) Root mean square 119909rms (1
119899
119899
sum
119894=1
1003816100381610038161003816119909119894100381610038161003816100381612
)
2
(10) Shape factor 119909sf119909rms119909
(11) Peak factor 119909pfxp119909rms
(12) Skewness 119909skesum119899
119894=1(119909119894minus 119909)3
(119899 minus 1) 1199093
std
(13) Impulse factor 119909if119909p
119909
(14) Margin factor 119909mf119909p
119909rms
In the fine-tuning of model parameters stochastic gradientdescent (SGD) is used to further reduce the training error andimprove the information fusion However in this researchthe SGD takes theminibatch to globally adjust the parametersin DBN Since there are 400 samples in the training datasetthe number of minibatch is 10 in the experiments
We use the training dataset to train the DBN model anduse the testing dataset to test the model identification accu-racy The classification process is repeated for 25 times andthe classification results are averaged as shown in Figure 7
The average accuracy of the training samples in multi-sensors is 975 and the number of correct classificationsamples is 390 This is much higher than those using othermethods which are 915 85 and 875 with 366 340and 350 respectivelyThe average accuracy of testing samplesin multisensors fusion is 955 and the number of correctclassification samples is 191 This is much higher than thoseusing other methods which are 89 785 and 75 with178 157 and 150 respectively
Compared to those individual sensors the training andtesting accuracies of multisensors information fusion areobviously higher than other methods In the three individualsensors the classified accuracy of 119878
1is better than 119878
2and 1198783
It is indicated that the sensor put on the vertical location ofthe testing pedestal is most sensitive to the bearing faultsTheresults prove that it is more effective to integrate the signalsfrom multisensors than to use the vibration from individualones
Multisensors
TrainTest
0
10
20
30
40
50
60
70
80
90
100
Aver
age c
lass
ifica
tion
rate
()
S1 S2 S3
Figure 7 Classification rate of individual sensor and multisensors
52 Deep Belief Network and Traditional Methods To intro-duce the effectiveness of the suggested method the com-parative methods are also tested with the same data such asSVM BPNN and KNN Without manual feature selectionthe 42-dimension feature vector is used directly for rollingbearing fault diagnosis The architecture of BPNN is 42-12-4 the decision function of KNN is Euclidean distancethe SVM used RBF kernel which is the most popular andsuitable kernel function applied The penalty factor andthe radius of the SVM kernel are 0216 and 03027 eachof which is determined through genetic algorithm All theexperiments are finished in the computer with Core i5 Intelcentral processing unit and 4G memory In the DBN SVMBPNN and KNN the experiments are respectively repeated15 times The average classification accuracies are shown inTables 5 and 6
In the training experiments DBN achieved 9572 iden-tification accuracy which is better than that of SVM (9228)KNN (9006) and BPNN (8363) for multivibrationsignals For the testing experiments the average accuracy ofDBN is 9317 meanwhile SVM is 9013 KNN is 8523and BPNN is 7813 In brief the experiments results explainthat the suggested methods have higher reliability and betteraccuracy than SVM KNN and BPNN in rolling bearing faultdiagnosis
The algorithms of DBN SVM KNN and BPNN alltrained the model by the same dataset and generated theclassifier to carry out the bearing fault diagnosis Howeverthe stability and generalization ability are different in thesemethods As shown in Tables 5 and 6 the training results ofDBN approximately agree with the testing results in the 15experiments The testing accuracies in SVM and KNN arelower than training accuracies by 3ndash5 The classificationaccuracy of BPNN is decreased obviously in test experiments
In the experiments the training datasets are selectedfrom sequence data samples of all kinds of fault condition
8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 Shock and Vibration
Table 4 The parameters of DBN in sensors 1ndash3 and multisensors
Parameters Sensor 1 Sensor 2 Sensor 3 MultisensorsInput 14 14 14 42Output 4 4 4 4Number of hidden layers 2 2 2 2Number of neurons in a layer 8 8 8 12Iteration 20 20 20 20Minibatch size 10 10 10 10Momentum 002 002 002 002Learning rate 001 001 001 001
Table 5 Results of training datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 9525 95 955 96 95 9725 95 955 9525 96 97 9625 955 96 9525 9572SVM 945 90 91 94 925 91 925 94 935 91 895 91 92 945 9325 9228KNN 90 88 8725 87 9375 8975 90 89 92 92 925 9025 90 89 905 9006BPNN 845 825 80 805 825 84 86 80 825 85 865 84 83 885 85 8363
Table 6 Results of testing datasets
Method Experiment results of each group () Average ()1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
DBN 935 95 935 955 945 965 945 945 94 935 96 945 95 96 945 9473SVM 91 89 90 905 91 895 90 90 91 90 89 90 885 92 905 9013KNN 85 86 825 845 875 855 88 845 86 845 85 84 855 845 855 8523BPNN 825 80 785 775 755 75 745 78 755 78 765 78 80 805 82 7813
and they orderly composite the training sample datasets Asthe testing samples are randomly selected from the variousstates datasets both sample category and sample order arerandom SVM to classify data identification mainly dependson the kernel functions with the training set which is closelyrelated to the quantity and quality dataset When using theKNN to classify the data identification the results mainly aredetermined by the distance function and once the distancefunction is selected it will not be able to transform So thetesting accuracies are much less than in training set of SVMandKNN BPNN is a typically shallow learningmodel whichinvolved no more than one nonlinear feature transformationand has difficulty in representing complex functions withpoor performance and generalization ability
Compared with the traditional machine learning andsignal processing technology DBN has the merit to getrid of the dependence on signal processing technologyOn the other hand DBN can adaptively extract the faultfeaturewithout restrictive assumptions or complex parameteradjustment Consequently it is nothing strange that theDBN as a promising method has been effectively applied inmultivibrations fusion
6 Conclusions
Multiple sensors installed on various locations of bearingpedestal can supply abundant information for fault diagnosis
and detection Based on this observation a novel techniqueusing deep belief network for the multivibrations fusion isput forward in this paper Some conventional time-domainfeatures are extracted from three accelerometer vibrationsensors Without manual feature selection the features areused directly as the input vectors of the DBN The obtainedaccuracy of multisensors is 975 which is about 10 higherthan single sensor At the same time the mean accuracyof DBN SVM KNN and BPNN is respectively 93179013 8523 and 7813 It suggests that DBN is moreeffective and stable for the identification of rolling bearingfault diagnosis than other methods From the results itcan be realized that DBN is able to adaptively integrateavailable fault features from multisensors and it obtainedhigher identification accuracy than traditional methods
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This paper was supported by Nature Science Fund of Chinaunder Grants nos 61402167 and 51375500 and the NationalScience and Technology Support Project of China underGrant no 2015BAF32B01
Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

Shock and Vibration 9
References
[1] Y Yang D Yu and J Cheng ldquoA fault diagnosis approach forroller bearing based on IMF envelope spectrum and SVMrdquoMeasurement vol 40 no 9-10 pp 943ndash950 2007
[2] L Zhang G Xiong H Liu H Zou andW Guo ldquoBearing faultdiagnosis using multi-scale entropy and adaptive neuro-fuzzyinferencerdquo Expert Systems with Applications vol 37 no 8 pp6077ndash6085 2010
[3] I El-Thalji and E Jantunen ldquoA summary of fault modellingand predictive health monitoring of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 60-61 pp 252ndash272 2015
[4] G Wang Z He X Chen and Y Lai ldquoBasic research onmachinery fault diagnosis-what is the prescriptionrdquo Journal ofMechanical Engineering vol 49 no 1 pp 63ndash72 2013
[5] R Yan R X Gao and X Chen ldquoWavelets for fault diagnosis ofrotary machines a review with applicationsrdquo Signal Processingvol 96 pp 1ndash15 2014
[6] J Ben Ali N Fnaiech L Saidi B Chebel-Morello and FFnaiech ldquoApplication of empirical mode decomposition andartificial neural network for automatic bearing fault diagnosisbased on vibration signalsrdquo Applied Acoustics vol 89 no 3 pp16ndash27 2015
[7] D Yang Y Liu S Li X Li and L Ma ldquoGear fault diagnosisbased on support vector machine optimized by artificial beecolony algorithmrdquoMechanism and MachineTheory vol 90 pp219ndash229 2015
[8] A Moosavian H Ahmadi A Tabatabaeefar and M Khaz-aee ldquoComparison of two classifiers K-nearest neighbor andartificial neural network for fault diagnosis on a main enginejournal-bearingrdquo Shock and Vibration vol 20 no 2 pp 263ndash272 2013
[9] P Shakya A K Darpe and M S Kulkarni ldquoBearing diagnosisusing proximity probe and accelerometerrdquo Measurement vol80 pp 190ndash200 2016
[10] M S Safizadeh and S K Latifi ldquoUsing multi-sensor data fusionfor vibration fault diagnosis of rolling element bearings byaccelerometer and load cellrdquo Information Fusion vol 18 no 1pp 1ndash8 2014
[11] X Li D Yang D Guo and L Jiang ldquoFault diagnosis methodbased on multi-sensors installed on the base and KPCArdquoChinese Journal of Scientific Instrument vol 32 no 7 pp 1551ndash1557 2011
[12] M Dong and D He ldquoHidden semi-Markov model-basedmethodology for multi-sensor equipment health diagnosis andprognosisrdquo European Journal of Operational Research vol 178no 3 pp 858ndash878 2007
[13] T P Banerjee and S Das ldquoMulti-sensor data fusion usingsupport vector machine for motor fault detectionrdquo InformationSciences vol 217 no 24 pp 96ndash107 2012
[14] L-L Jiang Y-L Liu X-J Li and A-H Chen ldquoGear faultdiagnosis based on SVM andmulti-sensor information fusionrdquoJournal of Central South University vol 41 no 6 pp 2184ndash21882010
[15] J Schmidhuber ldquoDeep learning in neural networks anoverviewrdquo Neural Networks vol 61 pp 85ndash117 2015
[16] G E Hinton and R R Salakhutdinov ldquoReducing the dimen-sionality of data with neural networksrdquo Science vol 313 no5786 pp 504ndash507 2006
[17] G E Hinton S Osindero and Y-W Teh ldquoA fast learningalgorithm for deep belief netsrdquoNeural Computation vol 18 no7 pp 1527ndash1554 2006
[18] D Yu L Deng I Jang P Kudumakis M Sandler and K KangldquoDeep learning and its applications to signal and informationprocessingrdquo IEEE Signal Processing Magazine vol 28 no 1 pp145ndash154 2011
[19] R Sarikaya G E Hinton and A Deoras ldquoApplication ofdeep belief networks for natural language understandingrdquoIEEEACM Transactions on Audio Speech and Language Pro-cessing vol 22 no 4 pp 778ndash784 2014
[20] D Erhan Y Bengio A Courville P-A Manzagol P Vincentand S Bengio ldquoWhy does unsupervised pre-training help deeplearningrdquo Journal of Machine Learning Research vol 11 pp625ndash660 2010
[21] H Shao H Jiang X Zhang and M Niu ldquoRolling bearingfault diagnosis using an optimization deep belief networkrdquoMeasurement Science and Technology vol 26 no 11 Article ID115002 2015
[22] P Tamilselvan Y Wang and P Wang ldquoDeep belief networkbased state classification for structural health diagnosisrdquo Relia-bility Engineering and System Safety vol 115 no 3 pp 124ndash1352013
[23] M Gan C Wang and C Zhu ldquoConstruction of hierarchicaldiagnosis network based on deep learning and its applicationin the fault pattern recognition of rolling element bearingsrdquoMechanical Systems and Signal Processing vol 72-73 pp 92ndash1042016
[24] Y Lei F Jia X Zhou and J Lin ldquoA deep learning-basedmethodfor machinery health monitoring with big datardquo Journal ofMechanical Engineering vol 51 no 21 pp 49ndash56 2015
[25] V T Tran F Althobiani and A Ball ldquoAn approach to fault diag-nosis of reciprocating compressor valves using Teager-Kaiserenergy operator and deep belief networksrdquo Expert Systems withApplications vol 41 no 9 pp 4113ndash4122 2014
[26] G-Y PanWChai and J-FQiao ldquoCalculation for depth of deepbelief networkrdquoControl andDecision vol 30 no 2 pp 256ndash2602015
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of








![Fault diagnosis of wind turbine bearing based on ... · identification (SSI) method in vibration signal analysis has also developed very fast [15, 16], especially in the fault diagnosis](https://img.dokumen.tips/doc/110x75/5e0c1dc6b5de626aea56ead7/fault-diagnosis-of-wind-turbine-bearing-based-on-identiication-ssi-method.jpg)
![A New Bearing Fault Diagnosis Method based on Fine-to ...eprints.lincoln.ac.uk/34719/1/A New Bearing Fault Diagnosis Method... · system [1]–[3]. Hence, in recent decades, fault](https://img.dokumen.tips/doc/110x75/60138f4565d089085f7d7b04/a-new-bearing-fault-diagnosis-method-based-on-fine-to-new-bearing-fault-diagnosis.jpg)



















