Embed Size (px)
DESCRIPTION
Rendered Path: Range-Free Localization in Anisotropic Sensor Networks with Holes. Mo Li, Yunhao Liu Hong Kong University of Science and Technology Mobicom 2007. Outline. Introduction REP protocol Performance evaluation Conclusions. Introduction. - PowerPoint PPT Presentation
Citation preview
Rendered Path: Range-Free Localization in Anisotropic Sensor Networks with Holes
Mo Li, Yunhao Liu
Hong Kong University of Science and Technology
Mobicom 2007
Outline
Introduction REP protocol Performance evaluation Conclusions

Introduction Sensor positioning is a crucial part of many locati
on-dependent applications that utilize WSNs. Ex coverage, routing and target tracking
Localization can be divided into Range-based
Add additional hardware (e.g: GPS) Range-free
Location information can be obtained RSSI Time of arrival or time difference of arrival Angle of arrival measurements

Introduction- range free
Since there is no way to measure physical distances between nodes.
Existing approaches depend on connectivity based algorithms.
Because the path between a pair of nodes may have to curve around intermediate holes.
Most previous approaches would fail in anisotropic networks. Ex. DV-Hop
Introduction- DV-Hop
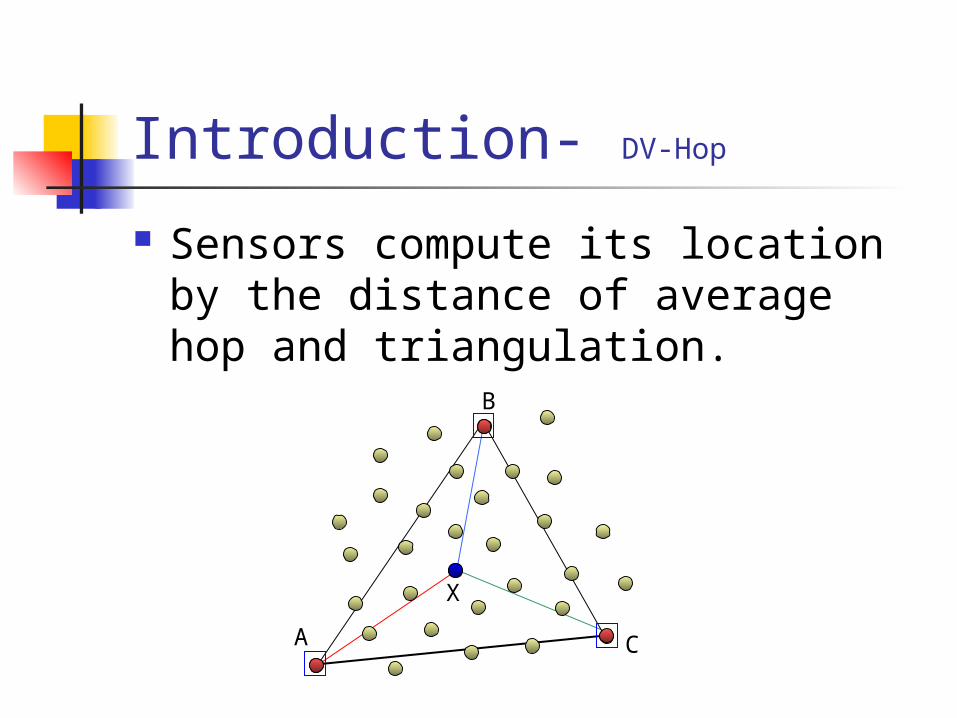
A
B
C
X
Sensors compute its location by the distance of average hop and triangulation.
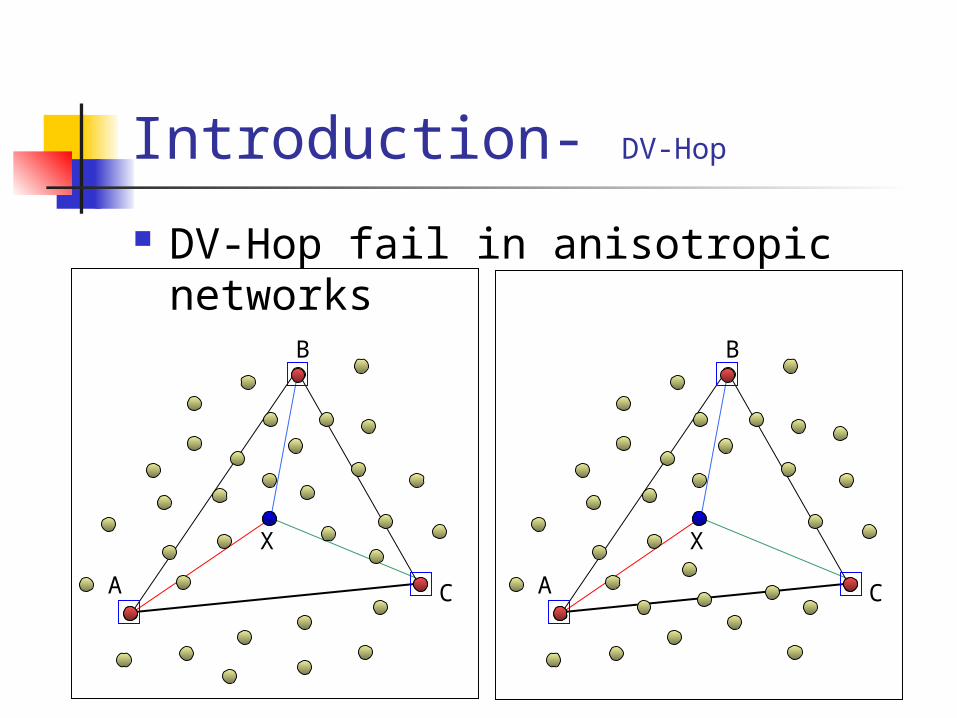
DV-Hop fail in anisotropic networks
Introduction- DV-Hop
A
B
C
X
A
B
C
X

Introduction
In a isotropic WSNs, there should have obstacle. the unbalanced power consumption of sensor
would create holes. there should many external interference cause communication failure.
Authors consider anisotropic network are most likely to exist in practice.

Introduction
In this work, authors propose a distributed range-free scheme for locating sensors in anisotropic WSNs.

REP protocol
Assumption in this paper The network is anisotropic. Sensor are deployment with high density. There are three seed nodes equipped with GPS
Each time sensor estimates one distance to a seed and sensor need to compute three times
for triangulation.
REP protocol
t
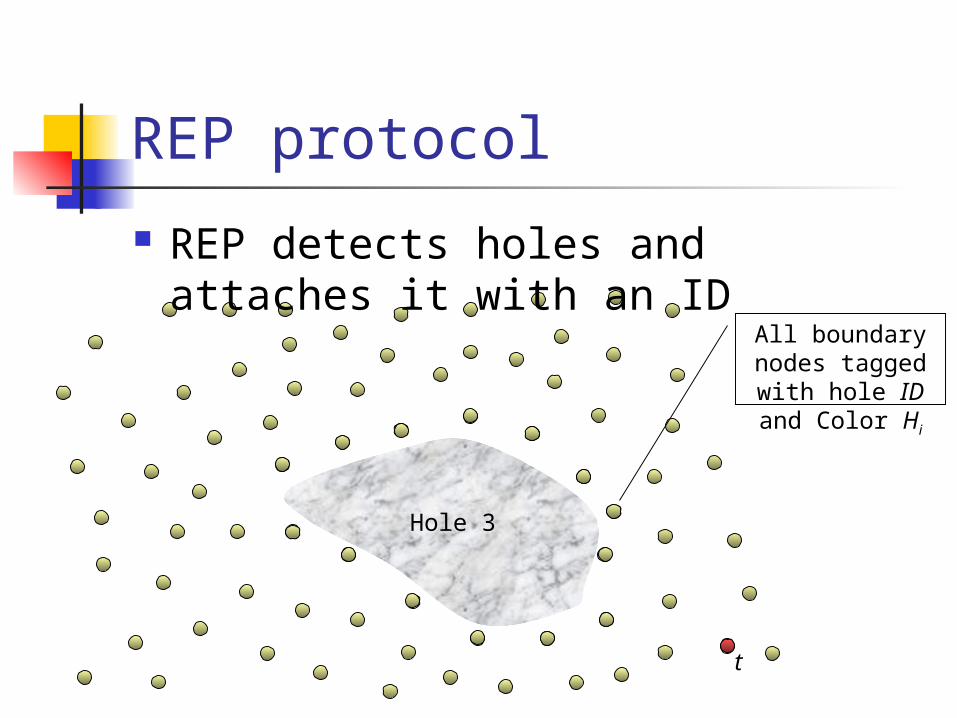
REP detects holes and attaches it with an ID
Hole 3
All boundary nodes tagged with hole ID
and Color Hi
REP protocol
t
s
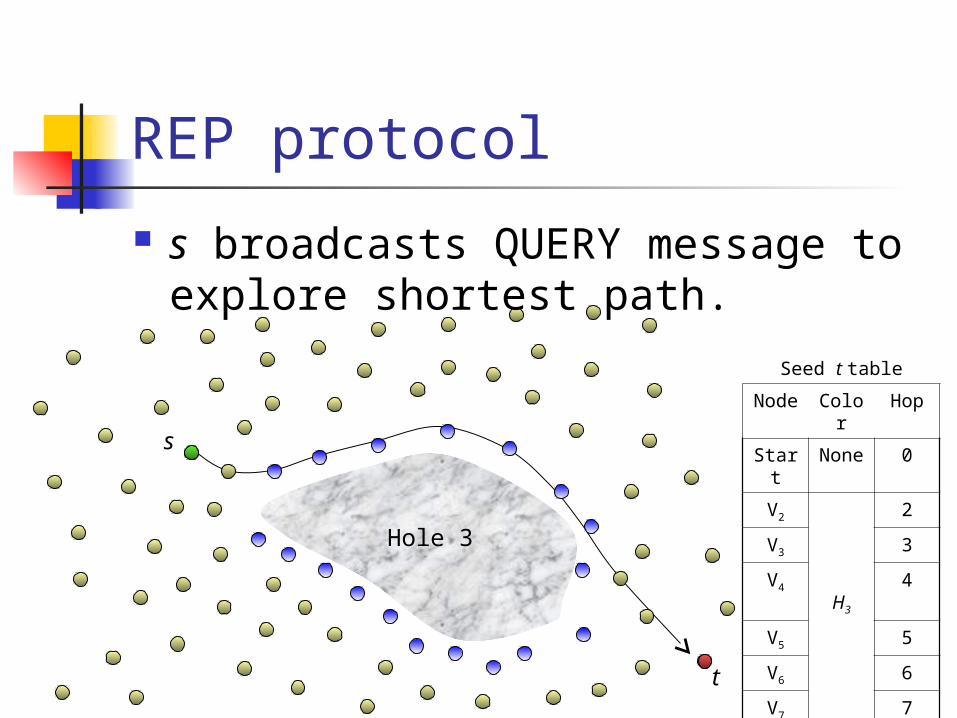
s broadcasts QUERY message to explore shortest path.
Hole 3
Seed t table
Node Color Hop
Start None 0
V2 2
V3 3
V4 H3 4
V5 5
V6 6
V7 7
V8 8
Dest None 11

REP protocol
t
s
All boundary node broadcast V_Hole messages with TTL= k
Hole 3

REP protocol
t
s
s broadcast QUERY message to explore virtual shortest path.
Hole 3
Seed t table
Node Color Hop
Start None 0
V2 2
V3 3
V4 CV 4
V5 5
V6 6
V7 7
V8 8
Dest None 11
REP protocol
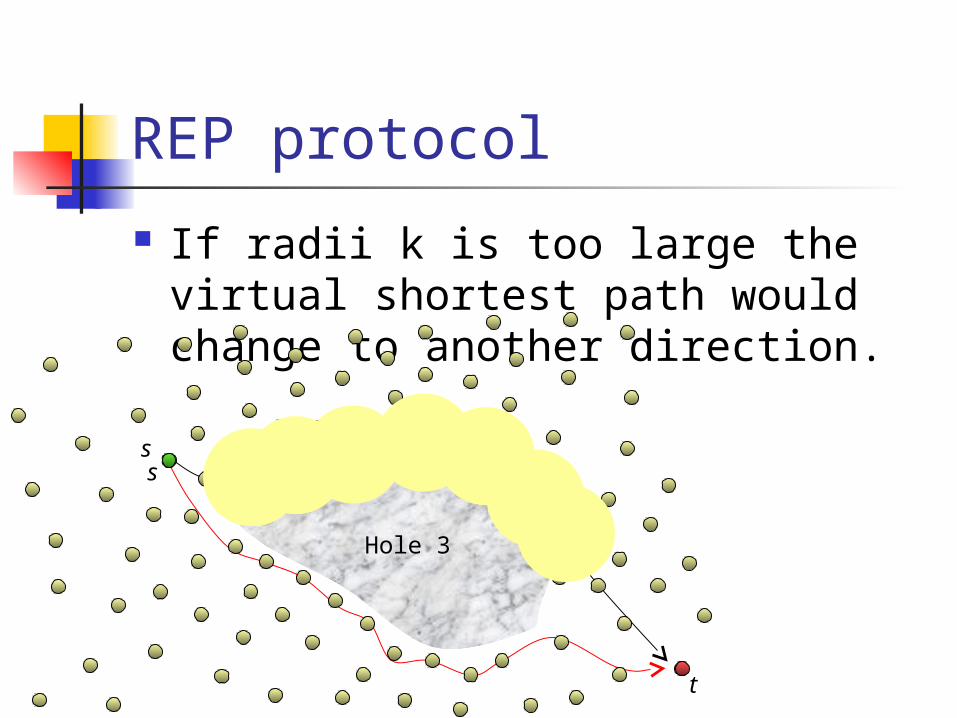
If radii k is too large the virtual shortest path would change to another direction.
t
s
Hole 3
s
REP protocol
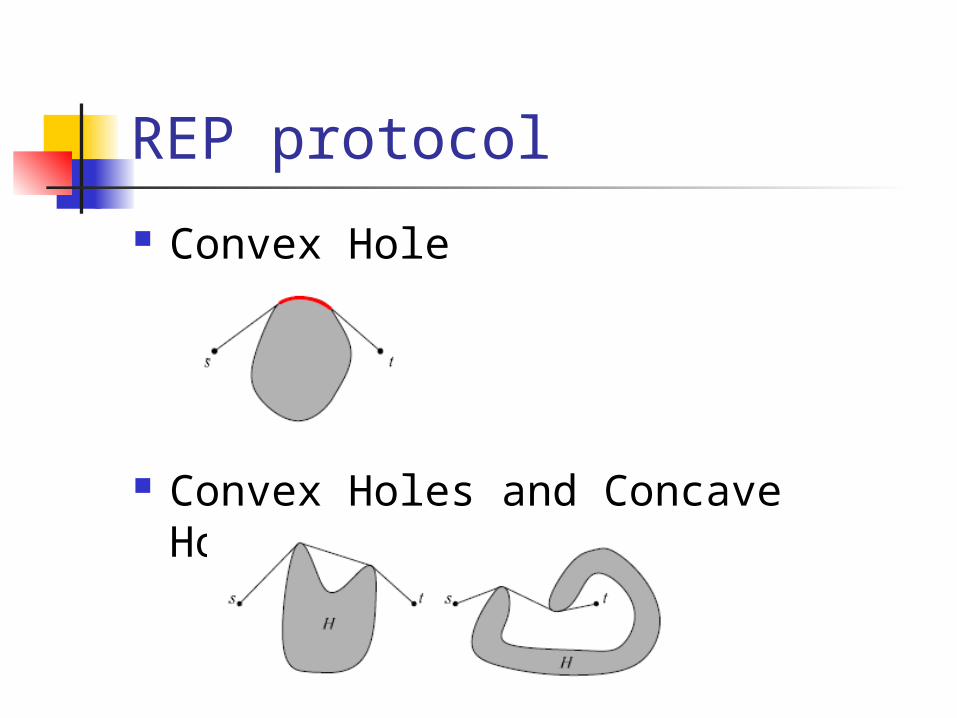
Convex Hole
Convex Holes and Concave Holes
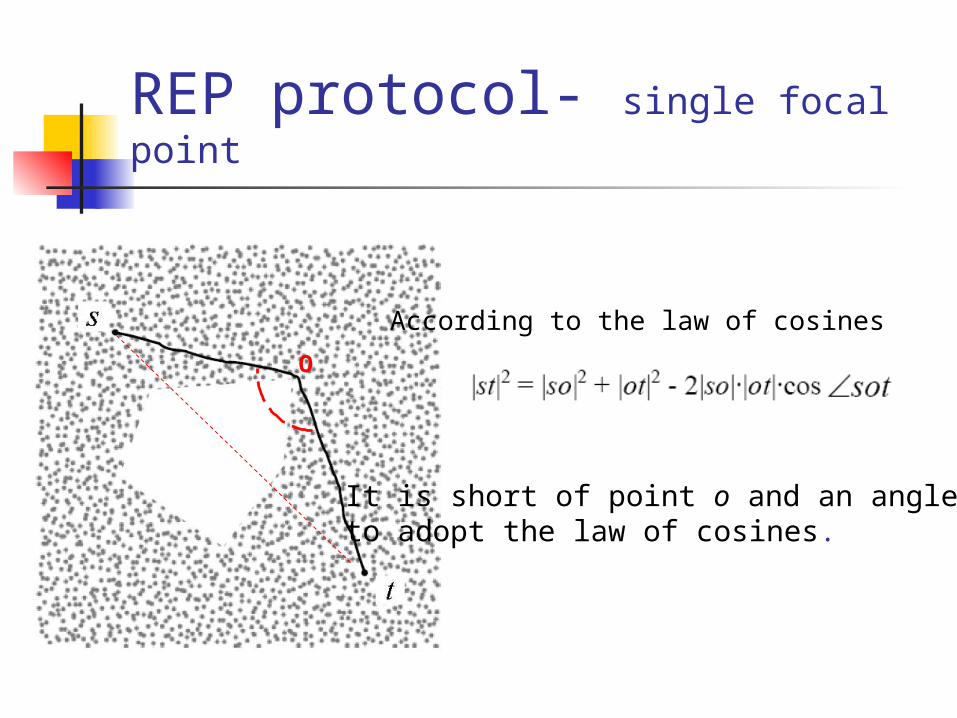
REP protocol- single focal point
O
It is short of point o and an angle sot to adopt the law of cosines.
According to the law of cosines
REP protocol- single focal point
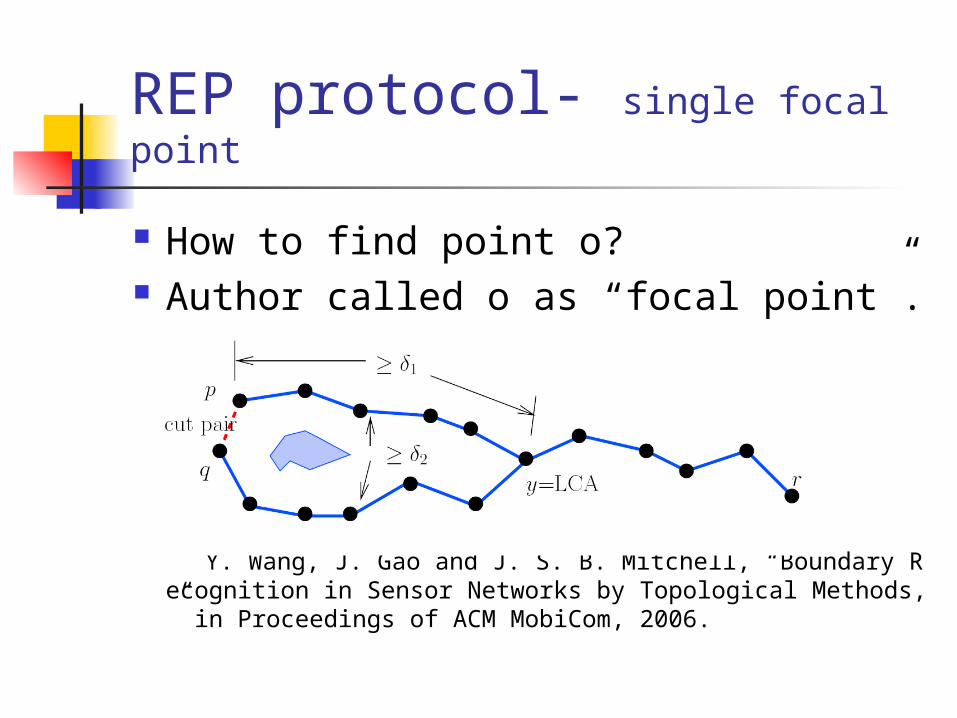
How to find point o? Author called o as “focal point”.
Y. Wang, J. Gao and J. S. B. Mitchell, “Boundary Recognition in Sensor Networks by Topological Methods,” in Proceedings of ACM MobiCom, 2006.

REP protocol- single focal point
Compute angle sot Firstly, o broadcasts V_Hole message with TT
L=k value.
O

REP protocol- single focal point
Compute angle sot Secondly, s broadcasts QUERY message to
find a virtual shortest path.
O
Seed t table
Node Color Hop
Start None 0
Vn n
Vn+1 n+1
Vn+2 CV n+2
Vn+3 n+3
Vn+4 n+4
Vn+5 n+5
Vn+6 n+6
Dest None m
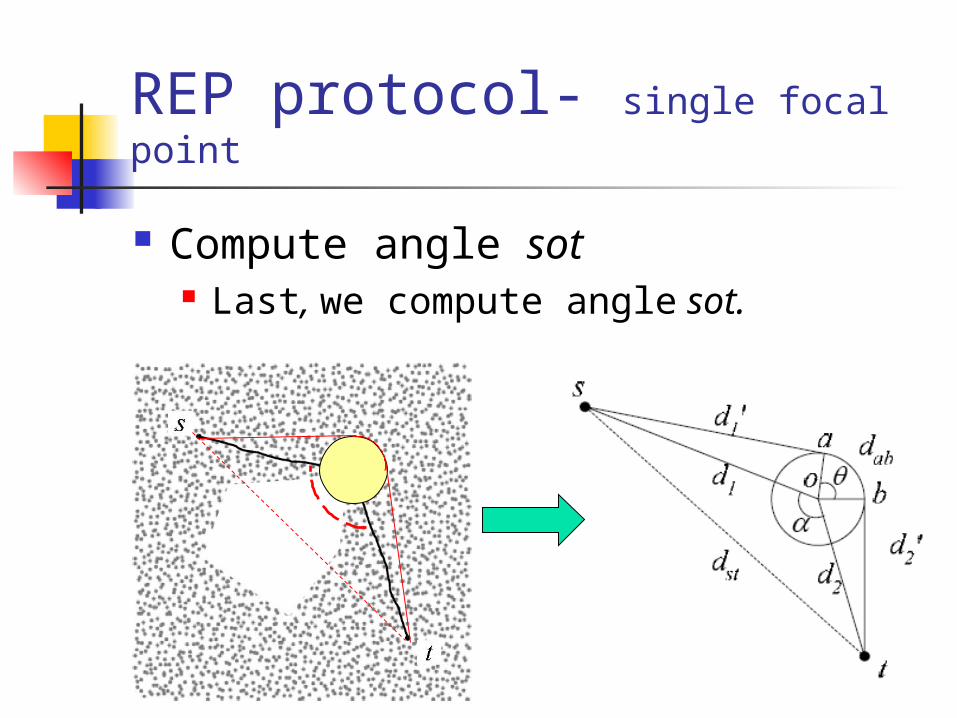
REP protocol- single focal point
Compute angle sot Last, we compute angle sot.
O
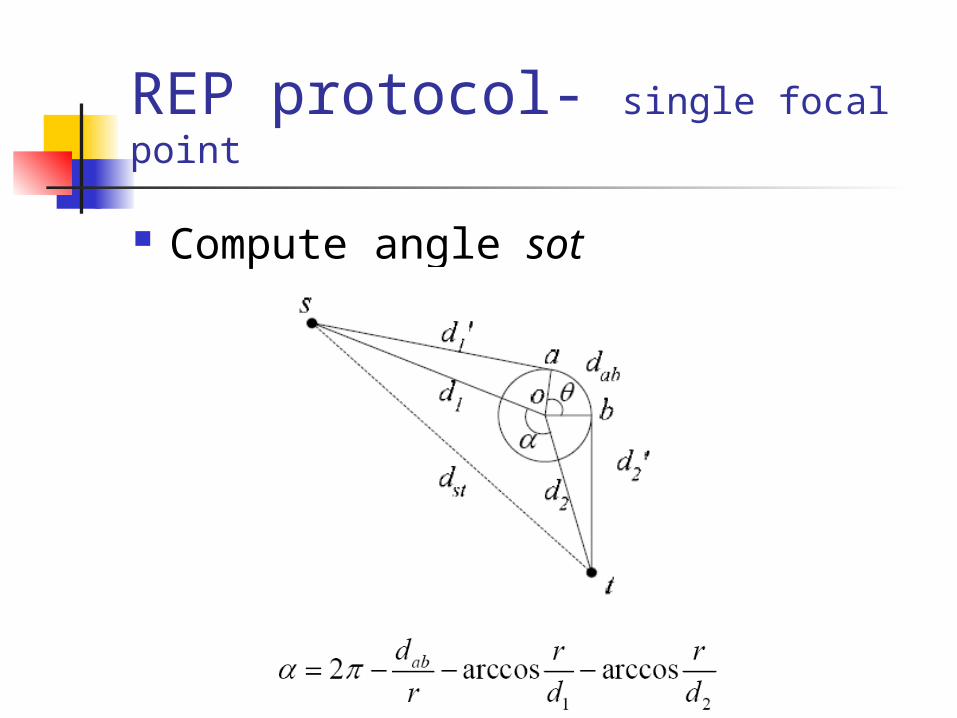
REP protocol- single focal point
Compute angle sot
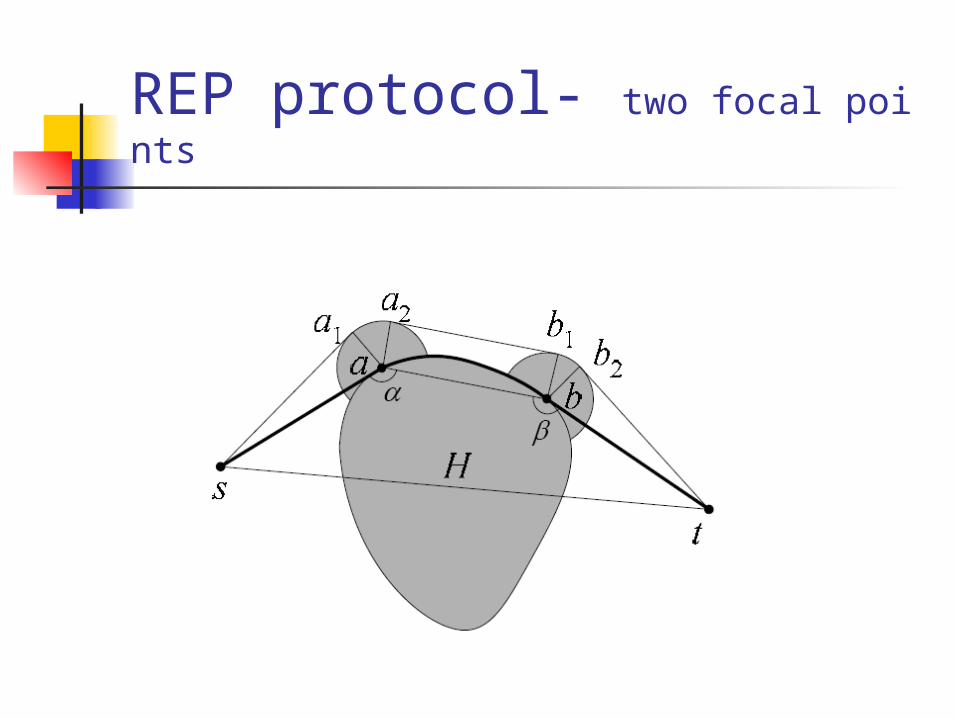
REP protocol- two focal points
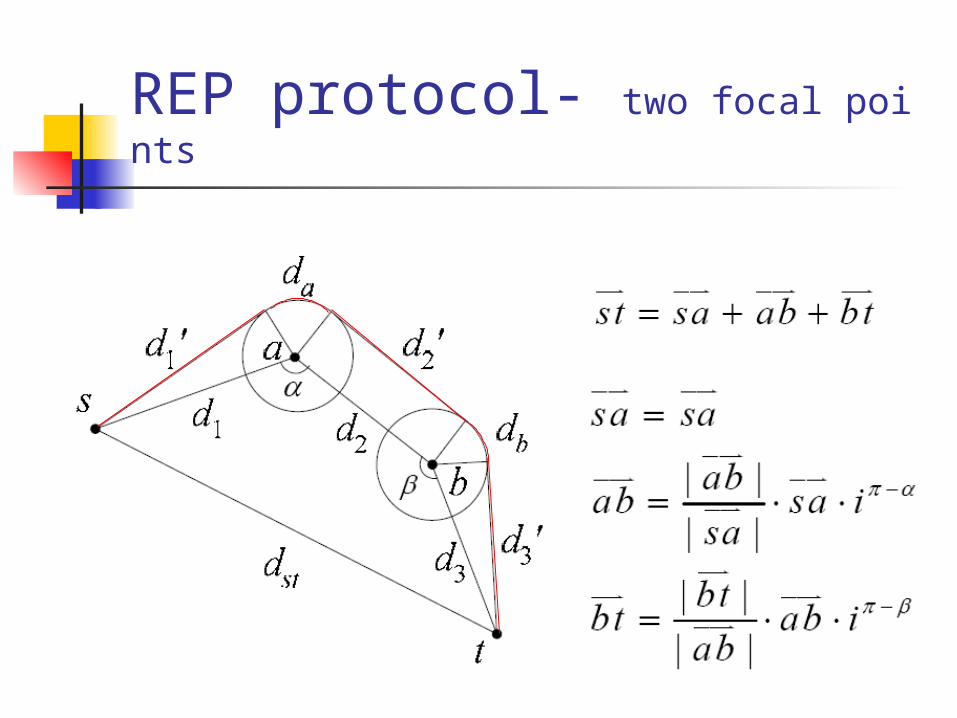
REP protocol- two focal points

REP protocol- two focal points
We can compute αand βby the previous way.
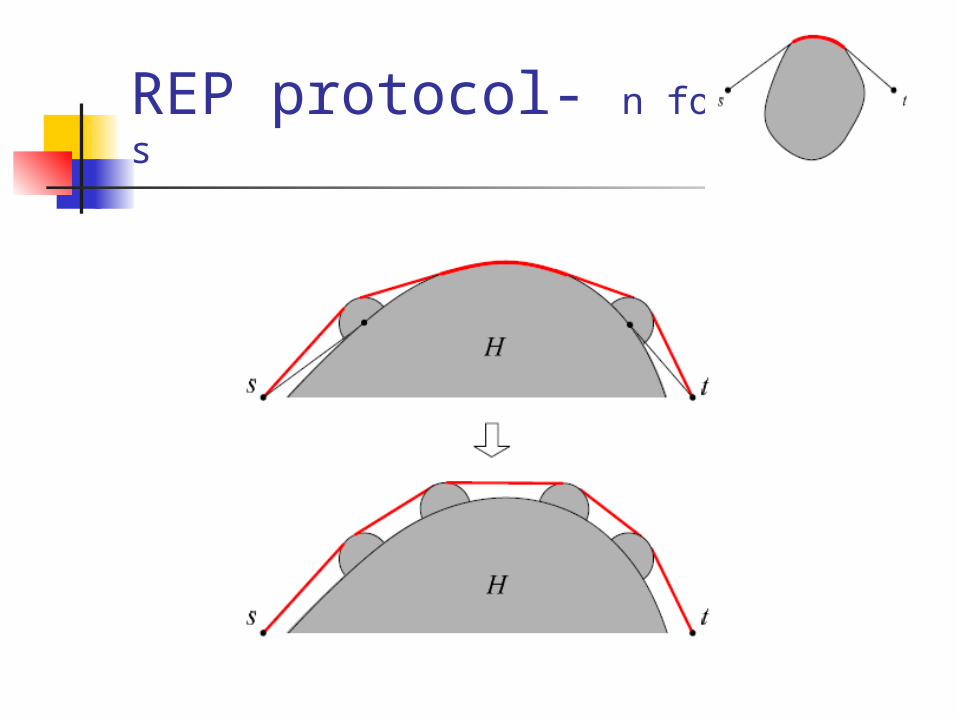
REP protocol- n focal points
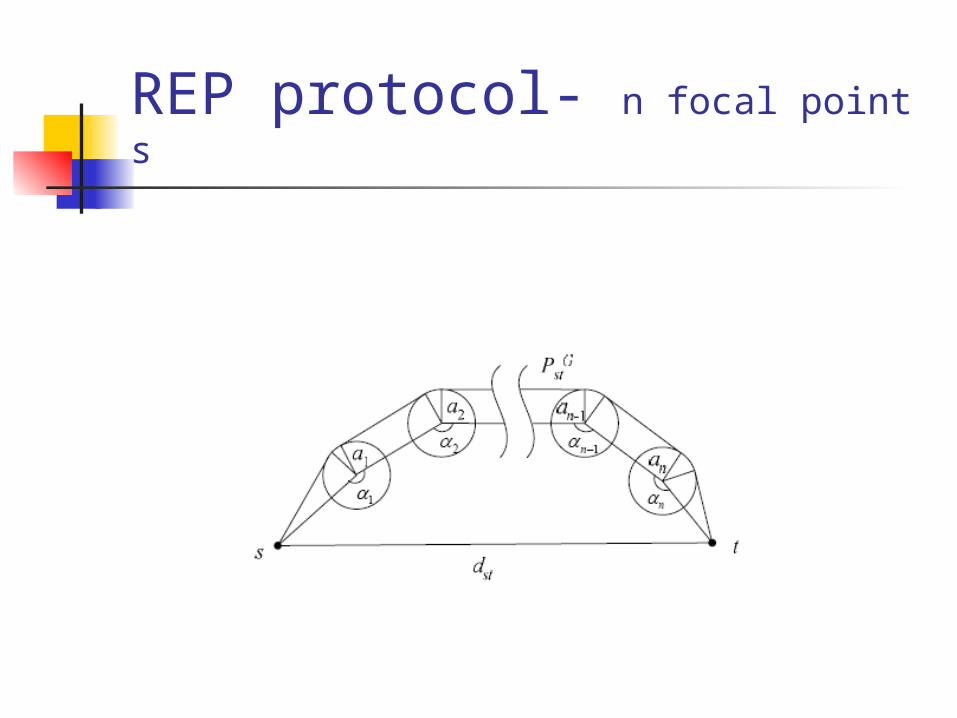
REP protocol- n focal points

REP protocol- Convex holes

REP protocol- Concave holes

Performance evaluation
Basic setting 5376 nodes
(average degree = 12.9)
Two holes4697 nodes
(average degree = 12.9)
Two holes (one concave)
5142 nodes (average degree = 12.8).
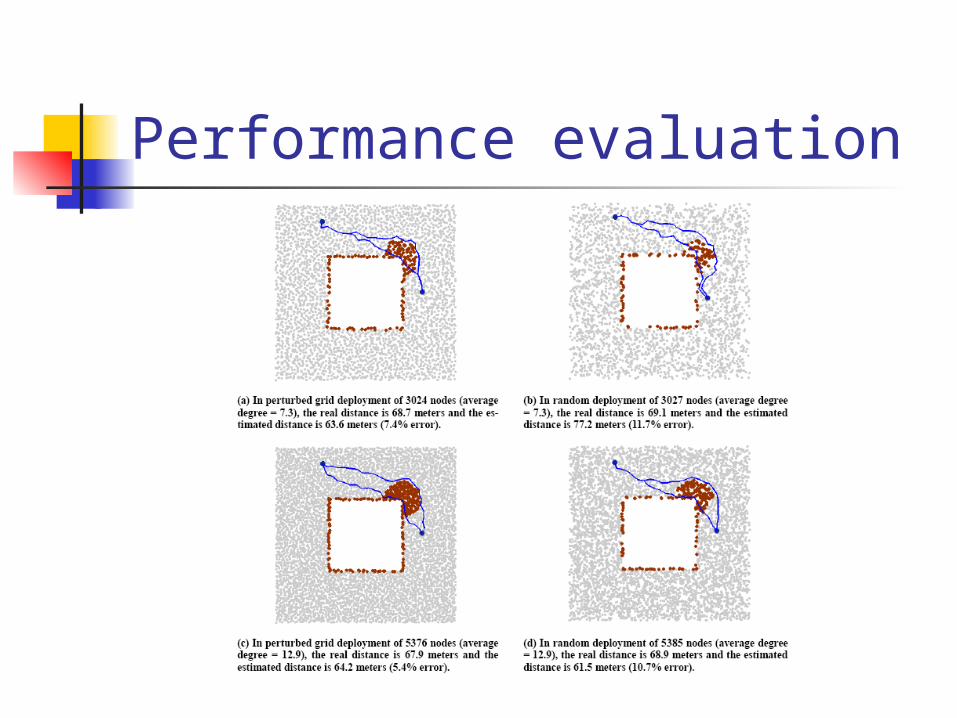
Performance evaluation

Performance evaluation
A large radius provides a better estimation.

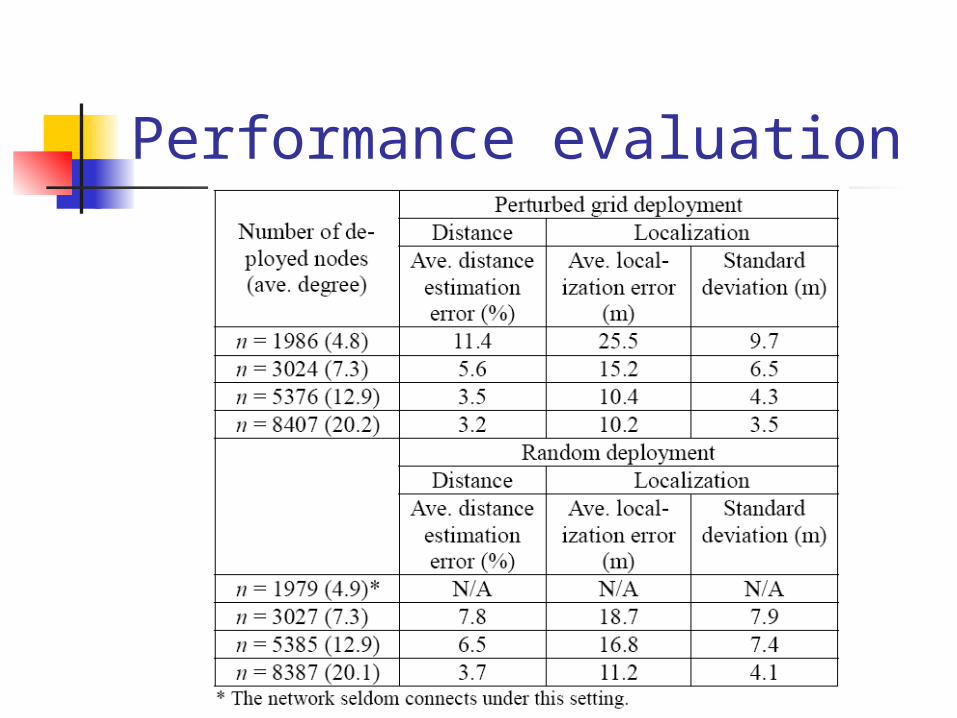
Performance evaluation
Localization performance under REP distance measurement.
Performance evaluation
Performance evaluation
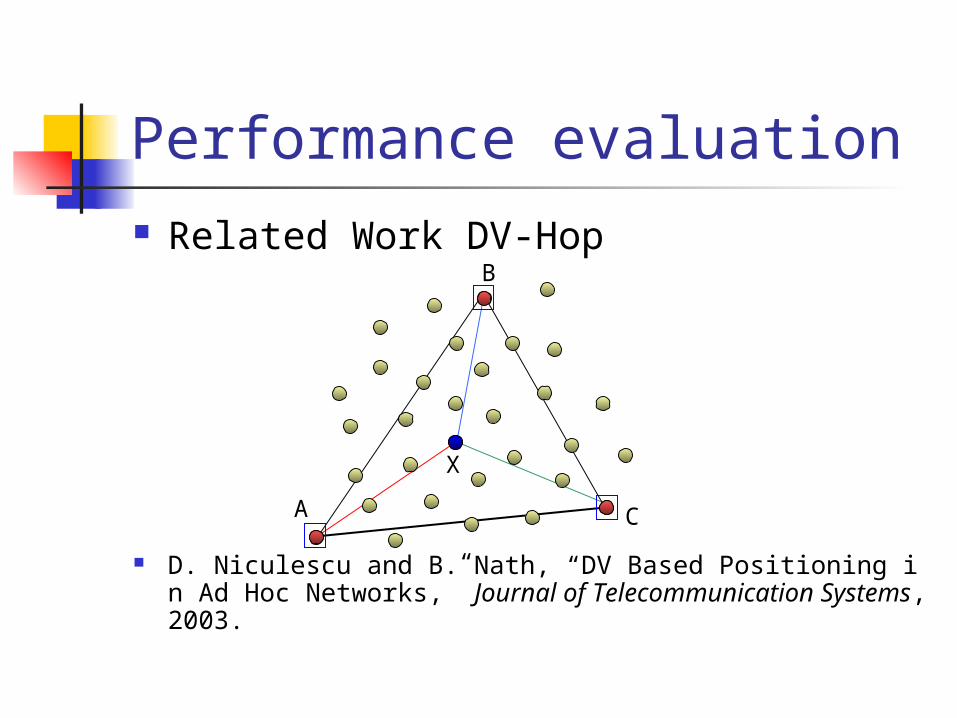
Related Work DV-Hop
D. Niculescu and B. Nath, “DV Based Positioning in Ad Hoc Networks,” Journal of Telecommunication Systems, 2003.
A
B
C
X

Performance evaluation

Conclusions
In this paper author propose a range-free localization scheme in anis
otropic sensor networks. The most important contributions
necessity of ranging devices dependence on large numbers of uniformly depl
oyed seed nodes assumption of isotropic networks.





























