Embed Size (px)
Citation preview

Intership Report
Reduced Order Modeling of Bladed Disks
Featuring Large Mistuning
Bruno Varin
Stage de Fin d’Études de l’École Centrale de Nantes
Structural Dynamics and Vibration Laboratory, McGill University
5/04/07 - 28/09/07


Contents
Acknowledgements v
Introduction vii
1 Mistuning 1
2 Cyclic symmetry 3
3 Model order reduction methods 7
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73.2 Small mistuning: Component Mode Mistuning Method . . . . . . . . . . . . . . . . . . 83.3 Quasi-static compensation method for large mistuning . . . . . . . . . . . . . . . . . . 10
3.3.1 Introduction of the quasi-static term . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3.2 Application to large mistuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 Combination of both methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4 Quasi-static mode computation 15
4.1 Structure of the code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.2 Code optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.2.1 Initial code . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.2.2 Intel MKL DSS routines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.2.3 Matrix formats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Large mistuning 21
5.1 Description of the original FEM model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.2 Convergence criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.3 Convergence study with a unique rogue blade . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.3.1 Comparison of three mistuning configurations . . . . . . . . . . . . . . . . . . . 235.3.2 Reduction of the frequency band of interest . . . . . . . . . . . . . . . . . . . . . 255.3.3 Convergence study on the 3 mistuned blades case . . . . . . . . . . . . . . . . . 25
5.4 Convergence study with different patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.4.1 Study on the frequency band [30;37] kHz . . . . . . . . . . . . . . . . . . . . . . . . 285.4.2 Study on the frequency band [30;37] kHz . . . . . . . . . . . . . . . . . . . . . . . . 30
5.5 New technique for the selection of the retained tuned modes . . . . . . . . . . . . . . 305.6 Effects of distortion magnitude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6 Forced response analysis combining large and small mistunings 35
6.1 Code Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366.2 Monte-Carlo analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

7 Conclusion 41
A Quasi-static terms computation module 43
B APDL script for geometry changing 49

Acknowledgements
I wish first to express my sincere gratitude to my advisor Vladislav Ganine, for his expert guid-
ance during these six months. I acknowledge his technical and strategic expertise, as well as
his patience.
Secondly, I would like to acknowledge professor Christophe Pierre, for allowing me to re-
alize this internship in his laboratory. I am also grateful to the laboratory supervisor Mathias
Legrand for his constant implication into my project, and his precious advices and recom-
mendations.
I finally acknowledge the remaining members of the vibration laboratory of McGill Uni-
versity, Alain Batailly, Sébastien Roques, Serif Gozen, Galina Pilgun and Stéphanie Polchi for
their valuable comments and suggestions.
In this document, some figures and results were taken verbatim from Vladislav Ganine’s
research with his permission.


Introduction
Bladed disk assemblies belong to a class of rotationally periodic systems, in which cyclic sym-
metry is usually exploited to predict vibrational response, because it reduces the size of a
problem to a single sector. However, the cyclic symmetry can be destroyed by blade-to-blade
geometrical and/or mechanical properties variations due to manufacturing tolerances and
operational wear, which is referred to as mistuning. Thus, attempting to numerically simu-
late the dynamic response of the structure becomes becomes very computationally heavy ,
because it has to be executed on a finite element full model.
In this work we try to combine two Reduced-order Model (ROM) techniques to approxi-
mate the solution in a fast and accurate way: the Component Mode Mistuning (CMM) tech-
nique, used for the small mistuning case, and the Quasi-Static Compensation (QSMC) Method ?
introduced to capture the effects of large geometric mistuning. The method is implemented
in FORTRAN code, using high performance Intel MKL numerical library.
The first objective of this project is to optimize for speed and memory usage the existing
implementation for quasi-static modes computation, using new thread-safe parallel sparse
routines. The code is validated and the accuracy of ROM is assessed with several test cases,
namely for the free response of a geometrically mistuned bladed disk first, and then for the
forced response of a disk featuring small and large mistuning. The sensitivity of the system
with selected geometrical patterns to random variations in blade stiffness matrix is assessed
through Monte-Carlo simulations.


1Mistuning
Bladed disks are parts of all turbomachinery systems, machines that transfer energy between
a rotor and a fluid, including both turbines and compressors. A bladed disk assembly is a
rotationally periodic structure (see figure 1.1(a)) where, ideally, each sector (see figure 1.1(b))
is identical and the theory of cyclic symmetry may be used : the dynamics of the entire struc-
ture are captured by a single sector that dramatically reduces the computational costs. In
(a) A perfectly tuned bladed disk (b) One single sector
Figure 1.1 - A bladed disk assembly and one of its single sector
practice, however, there are small or large unavoidable differences within the structure indi-
vidual blades, commonly referred to as mistuning. Such mistuning destroys the cyclic sym-
metry, and can drastically affect its vibratory behavior of the structure. In particular, certain
mode shapes may become spatially localized, which implies that the vibration energy in a
bladed disk becomes confined to one or a few blades rather than being uniformly distributed
throughout the system.
This phenomenon may be explained by viewing the vibration energy of the system as a cir-
cumferentially traveling wave. In a perfectly tuned system, the wave propagates through each
identical disk-blade sector, yielding uniform vibration amplitudes that differ only in phase.
In the mistuned case, however, the structural irregularities may cause the traveling wave to be
partially reflected at each sector. This can lead to confinement of vibration energy to a small
region of the assembly. As a result, certain blades may experience forced response amplitudes
and stresses that are substantially larger than those predicted by an analysis of the nominal

2 Mistuning
Figure 1.2 - Large mistuning due to foreign object damage
design. Hence, certain blades may exhibit much shorter lifespan than would be predicted by
a fatigue life assessment based on the nominal assembly.
Two types of mistuning are distinguished :
• the one we call small mistuning : small enough not to affect the geometry, this irregular-
ity in the structure is due to manufacturing tolerances, material deviations, and uneven
operational wear. The great majority of recent publications focus on the small mis-
tuning case, and many efficient computational methods have already been developed,
like the CMM (Component Mode Mistuning) method which can predict the effects of
mistuning on the vibratory response of a turbomachinery rotor stage. Furthermore,
these techniques enable analysis of large numbers of randomly mistuned bladed disks
in order to estimate the mistuned forced response statistics for a rotor design. They are
based on reduced order modeling (ROM) methods, presented in the next chapter.
• the large mistuning : large geometric variations (cracking or fracture of a blade) that
can sometimes appear, due to fatigue or foreign object damages (see figure 1.2). It is
traduced by large magnitude deviations in mass and stiffness matrices of the structure.
It can also change dramatically the dynamic behavior of a bladed disk, but these large-mistuning
cases have rarely been studied. The goal of this project is to optimize a reduced-order meth-
ods in order to compute the vibratory behavior of a bladed disk subject to large and small
mistuning.

2Cyclic symmetry
A structure features cyclic symmetry when it can be created by the cyclic rotation of a minimal
pattern (called a sector) around a symmetric axis. This property is very appealing from the
computational time point of view, because any structural problem can be solved considering
only one single sector. Thus, this theory ? can be applied to compute the normal modes of
the Finite Element Model (FEM) of a perfectly tuned bladed disk, composed of N sectors.
Accordingly, the eigenvalue problem matrix is defined by:
Y=K−ω2M (2.1)
with K and M being the stiffness and mass matrices of a fundamental sector. This sector is
viewed as an integral part of the disk, so its structural matrices include all elements related
to the boundary towards one of its adjacent sectors, whereas the elements related to its other
boundary belong to its other adjacent sector. This is represented in the figure 2.1. Thus, since
structural coupling will only be present between adjacent sectors, the eigenvalue matrix of
the entire problem has the following block-circulant form in cyclic coordinates:
Y=
Y0 Y1 0 · · · 0 YT1
YT1 Y0 Y1 0 · · · 0
......
.. ... .
.. .. ..
0 · · · 0 YT1 Y0 Y1
Y1 0 · · · 0 YT1 Y0
(2.2)
Whereas Y0 describes the internal behavior of the sector, Y1 corresponds to the sector-to-
sector coupling. Using this following block (associated with the k th double harmonic) yields:
eYk =
Y0+(Y1+YT
1)cos kα (Y1−YT1)sin kα
(YT1 −Y1)sin kα Y0+(Y1+YT
1)cos kα
, (2.3)
where k ∈�
1,H�
is called the order of the harmonic, α is the fundamental interblade phase
shift defined as 2π/N , and:
H =N −1
2if N is odd, or=
N
2if N is even (2.4)

4 Cyclic symmetry
SECTOR 1 SECTOR 2
Boundary DOFs from the sec-tor 2 belonging to the sector 1in cyclic symmetry theory
Figure 2.1 - Cyclic expansion of a blisk
is the number of harmonics. The eigenvalues problem of the entire structure finally becomes:
eY=
eY0 0 · · · · · · 0
0 eY1 0 · · · 0... 0
......
......
. . . 0
0 0 · · · 0 eYH
(2.5)
From the theory of symmetrical components, it is found that some quantity xn (i.e., displace-
ments, forces, etc.) in physical coordinates for the n th sector can be related to the correspond-
ing quantity uk in cyclic coordinates for a fundamental sector. In the context of this project,
these quantities represent nodal displacements in physical and cyclic coordinates, respec-
tively. These vectors are defined as x= (x1 x2 x3 . . . xN )T and u= (u0 u1,c u1,s u2,c . . . u
N2 )T and
the coordinate transformation is governed by the expression:
xn =1p
Nu0+
Ç2
N
H∑
k=1
�uk ,c cos (n −1)kα+uk ,s sin (n −1)kα
�+(−1)n−1
pN
uN2 (2.6)
that can be recast in a matrix form:
x= (F⊗ I)u (2.7)
where F is the real-valued Fourier matrix. It is now easy to obtain the corresponding backward
transformation from physical to cyclic coordinates:
u= (FT⊗ I)x (2.8)
Assuming a finite element model of a N -sectors bladed disk, with a sector size of n DOFs,
a cyclic symmetry approach leads in the worst case (i.e. the case where N is odd) to one

5
eigenvalue problem of size n 2 and (N − 1)/2 eigenvalue problems of size 4n 2, while the full
analysis leads to a single, but very costly, eigenvalue problem of size N 2n 2. It is clear that
cyclic symmetry techniques provide high computational savings.

6 Cyclic symmetry

3Model order reduction methods
Modeling and simulation of dynamic systems is a very important task in engineering sci-
ences. If the modeling is based on the Finite Element (FEM) or Finite Volume Methods (FVM),
the resulting large scale mathematical model is often too complicated and too computation-
ally expensive, and thus not very useful in many practical applications. Therefore, it is prefer-
able to reduce its size by dividing it into several smaller problems.
Approximating a high order problem by a lower order one has received a considerable
amount of interest over the years, and many methods for obtaining the reduced order model
have been suggested. Most of these methods involve projection into a lower order subspace,
and belongs to the class of Reduced Order Models (ROM). The Component Mode Mistuning
(CMM) and the Quasi-static Mode Compensation one (QMC) are reviewed in this section.
3.1 Introduction
Consider a system of differential equations as follows:
_u= f (u, t ), u ∈RN (3.1)
to be approximated by a simpler (smaller) model of the form:
ξ= g (ξ, t ), ξ∈Rm (3.2)
with m≪N. A model order reduction consists in three steps:
− Choosing the basis on which you want to project.
− Projecting on the subspace.
− Deforming this subspace.
The difficulty arises by imposing additional constraints. In the case of modeling a bladed disk
featuring large and/or small mistuning, it is imposed that the procedure of model reduction
must be automatic, and computationally fast and efficient. The approximation error, which
should be small, is based on the maximum euclidian norm of the displacement of the system

8 Model order reduction methods
DOFs, computed through a harmonic analysis. The dynamics of the full original system is
written as follows:
Mu+Cu+Ku= f (3.3)
where M is the mass matrix, C the damping matrix and K the stiffness matrix, all of size N×N ,
where N is the number of degrees-of-freedom of the system. Both N × 1 vectors u and f re-
spectively store the unknown displacement and the external loading force. A transformation
matrixΨ defines a relationship between old variables u and new variables ξ:
u=Ψξ (3.4)
As this transformation matrix is not dependant on time, we substitute it in equation (3.3):
Mrξ+Crξ+Krξ= fr (3.5)
such as Mr =ΨTMΨ, Cr =Ψ
TCΨ, Kr =ΨTKΨ and fr =Ψ
Tf. In this study,Ψ contains a set of se-
lected compensated modes of the system (see the quasi-static mode compensation section).
3.2 Small mistuning: Component Mode Mistuning Method
The Component Mode Mistuning (CMM) method ? is presented here. The main idea of
this method is that, when a tuned bladed disk has normal modes closely spaced in a fre-
quency range, a slightly mistuned bladed disk also features closely spaced modes in the same
range, and thus the mistuned normal modes can be expressed using a subset of the tuned
normal modes. Using this approach, the reduced system is given by:
µsyn = I+ΦSΓ
TMδΦ
SΓ
κsyn =ΛS +ΦSΓ
TKδΦS
Γ
(3.6)
where ΛS is a diagonal matrix of the eigenvalues of the retained tuned-system normal modes.
Superscripts S and δ denote respectively a tuned system and a mistuning component, which
is is defined as having mass and stiffness matrices equal to the difference between the mis-
tuned and tuned matrices of a single blade. As the subscript Γ denotes the DOFs of a single
blade, the matrix ΦSΓ
is a the matrix of the tuned-system normal modes expressed on the
blade’s DOFs.
Here, this blade portion of the tuned-system normal modes is represented by the modal
participation factors of the component modes of a tuned cantilevered blade. However, if only
cantilevered-blade normal modes are used to describe the blade motion, then the displace-
ments at the blade-disk boundary cannot be captured. Since it is not feasible to measure the
additional boundary modes, an additional mode set is introduced in the following form:Ψ
Bo
I
(3.7)

3.2 Small mistuning: Component Mode Mistuning Method 9
where ΨBo
corresponds to the interior DOFs of a cantilevered blade, and I corresponds to the
boundary DOFs that are fixed in the cantilevered blade. The number of modes in this set is
the number of boundary DOFs so that any boundary motion can be described. Since mis-
tuning may be random, the nominal mass and stiffness matrices of a blade, MBo
and MKo
, are
used in minimizing the contribution of the boundary modes. Then, these mass and stiff-
ness matrices can be projected in the boundary modes subspace, and the boundary modes’
contribution is minimized. Finally, the n th blade’s portion of the tuned-system modes is de-
scribed by cantilevered blade normal modes and boundary modes as follows:
ΦSΓ ,n =
Φ
BoΨ
B ,mo
0 I
qmΦ,n
qΨ ,n
for mass mistuning
Φ
BoΨ
B ,ko
0 I
qkΦ,n
qΨ ,n
for stiffness mistuning
(3.8)
where qmΦ,n , qk
Φ,n , qΨ ,n are the modal participation factors, and ΨB ,mo
and ΨB ,ko
correspond re-
spectively to the minimized projected mass and stiffness matrices onto the boundary modes.
The modal participation factors can be easily calculated thanks to the cyclic symmetry prop-
erty of a tuned bladed disk. According to equation (3.8), it is obvious that:
qΨ ,n =ΦSb ,n (3.9)
where subscript b denotes the boundary DOFs of a sector. The modal participation factors
on the cantilevered-blade modes are then given by:
qmΦ,n =
hΦ
Bo
0i
MBoΦ
SΓ ,n
ΛSo
qkΦ,n =
hΦ
Bo
0i
KBoΦ
SΓ ,n
(3.10)
In most cases, only a few normal mode participation factors per blade (usually, just one for
unshrouded rotors) are dominant, because the blade motion in a tuned-system normal mode
tends to be well correlated to that of a cantilevered-blade normal mode. Therefore, a few
dominant modes are sufficient for the normal mode set ΦBo
. Inserting equation (3.8) into
equation (3.6), the reduced mass and stiffness matrices become:
µsyn = I+
N∑
n=1
qmn
TUm TMδn
Um qmn
κsyn =ΛS +
N∑
n=1
qkn
TUk T
Mδn
Uk qkn
(3.11)
where:
Um =
Φ
BoΨ
B ,mo
0 I
Uk =
Φ
BoΨ
B ,ko
0 I
(3.12)
This method provides accurate results in a quick way when dealing with bladed disks fea-
turing small mistuning, but requires too many tuned-system normal modes to capture large
(geometric) mistuning and becomes computationally prohibitive.

10 Model order reduction methods
3.3 Quasi-static compensation method for large mistuning
A new reduced-order modeling technique ?? is presented here, for bladed disks that fea-
ture large, geometric mistuning. It is formulated by employing a mode-acceleration method
with quasi-static mode compensation, accounting for the effects of mistuning as though they
were produced by external forces. Thus, a new set of basis vectors is established for the mis-
tuned system. The mode-acceleration method is usually used to improve the accuracy of
forced response predictions by including quasi-static modes of the form:
(K−ω2c
M)−1f (3.13)
3.3.1 Introduction of the quasi-static term
Still considering the global equation of an undamped system, we have:
Mu+Ku= f (3.14)
An harmonic decomposition of the displacement vector u is then introduced:
u= xejωt (3.15)
with being x the complex displacement vector and ω the frequency excitation. Thus, equa-
tion (3.14) becomes:
(K−ω2M)x(ω) = f(ω) ⇐⇒ x(ω) = (K−ω2M)−1f(ω) (3.16)
Then, this eigenvalue shifting technique is employed:
(K−ω2M) = (K− ω2M) (3.17)
where K=K−ω2c
M and ω2 =ω2−ω2c
. The centering frequencyωc is usually given by:
ω2c≃ω2
min+ω2max
2(3.18)
Thus, equation (3.16) becomes:
x(ω) = (K− ω2M)−1f(ω) (3.19)
One can choose the eigenvalue and eigenvector matrices Λ and Φ of the model defined in
equation (3.14) as Λ = diag(Λ1,Λ2, . . . ,Λn ) and Φ = [Φ1,Φ2, . . . ,Φn ] so that K and M satisfy the
following orthogonality properties:
ΦTKΦ=Λ
ΦTMΦ= I
(3.20)
Plugging equation (3.20) into equation (3.19) leads to:
x(ω) =Φ(Λ− ω2I)−1Φ
Tf(ω) (3.21)

3.3 Quasi-static compensation method for large mistuning 11
The mode-superposition method allows the decomposition of the response function x(ω) in
the modal space as:
x(ω) =
n∑
i=1
�Φ
Ti
f(ω)
ω2i − ω2
�Φi (3.22)
Using the power series to expand the inverse of the matrix (Λ−ω2I), and using equation (3.22),
equation (3.21) finally becomes:
x(ω) =
H∑
i=1
(ω2K−1M)i−1K−1f(ω)+
n∑
j=1
ω2−ω2
c
ω2j −ω2
c
!HΦ
Tj
f(ω)
ω2j −ω2
Φj (3.23)
H is the level of the mode-acceleration and may be any integer larger than zero. If one wants
to retain only the modes in the excitation frequency band, the low-high modes truncation
scheme can be applied. If the L1th through L2
th modes are selected retained modes, the fre-
quency response function can be expressed as:
x(ω)≃H∑
i=1
(ω2K−1M)i−1K−1f(ω)+
L 2∑
j=L 1
ω2−ω2
c
ω2j −ω2
c
!HΦ
Tj
f(ω)
ω2j −ω2
Φj (3.24)
Thus, there are two ways of making an approximation of the frequency response with the
mode-acceleration method. One can either decide to enlarge the middle modes range [L1, L2]
and to decrease the level H , or to the contrary increase H and narrow the modes range. How-
ever, the problem with the second solution is that a high level H calls for heavy computation,
and furthermore it can create numerical inaccuracy. Therefore, one of the objectives of the
study is to choose an adapted mode range to compute the response in the most accurate way.
The quasi-static mode compensation method consists in H = 1. Thus, equation (3.24)
becomes:
x(ω)≃ (K−ω2c
M)−1f(ω)+
L 2∑
i=L 1
�ω2−ω2
c
ω2i −ω2
c
�Φ
Ti
f(ω)
ω2i −ω2
Φi (3.25)
By defining the i th modal amplitude associated to the i th normal mode by:
ηi =Φ
Ti
f(ω)
ω2i −ω2
(3.26)
we finally have:
x(ω)≃ (K−ω2c
M)−1f+∑
i
�ω2−ω2
c
ω2i −ω2
c
�ηiΦi (3.27)
(K−ω2c
M)−1f are the quasi-static modes. Note that thanks to the�ω2−ω2
c
ω2i−ω2
c
�coefficients, the
system can be described with a small set of tuned-normal modes whose natural frequency
ωi is close to the centering frequencyωc . However, the chosen centering frequency must not
be equal to the excitation frequency, or to the natural frequencies of the system, otherwise it
would nullify or create an infinite term instead of the dynamic modes combination.

12 Model order reduction methods
3.3.2 Application to large mistuning
The MAM concept described above can be applied to model geometrically mistuned sys-
tem. Consider this system is vibrating at the natural frequency of a tuned-system mode and
that this motion is exactly the same as that of the tuned-system mode. In this case, equa-
tion (3.27) becomes:
ΦSj− (Km −ω2
cMm )−1fj =
∑
i
ωS
j
2−ω2c
ωmi
2−ω2c
ηi jΦ
mi
(3.28)
where loading fj required to enforce this motion is :
fj = [Km − (ωS
j
2+ω2
c)Mm ]ΦS
j=
0
[Kδ− (ωSj
2+ω2
c)Mδ]ΦS
Γ ,j
!(3.29)
Mm and Km are the mass and stiffness matrices of the mistuned system, Mδ and Kδ are the
mass and stiffness matrices of the mistuned DOFs, ωSj and ΦS
jare the j th natural frequency
and mode shape of the tuned system, ωmi and Φm
iare the i th natural frequency and mode
shape of the mistuned system, ΦSΓ ,j is the mode shape vector on mistuned DOFs and ηi j is
the modal participation of the i th mistuned system normal mode for the j th tuned-system
normal mode.
This formulation of the problem has two advantages:
− the use of tuned system normal modes, which are easy to obtain from the cyclic sym-
metry analysis of a single sector
− non-zero forcing terms which appear only on the DOFs where mistuning exists, thanks
to the decomposition of mass and stiffness matrices of the mistuned system into ones
of the tuned system and ones of the mistuned component.
Quasi-static term calculation
(Km−ω2c
Mm )−1fj is the quasi-static term written on all mistuned system DOFs, but we can
obtain it from tuned system DOFs too, writing:
(Km −ω2c
Mm )−1fj =ΨS,Qg
QΓ ,j (3.30)
where gQΓ ,j contains the forces that need to be applied to the equivalent tuned system, and is
written as:
gQΓ ,j = [I+(K
δ−ω2c
Mδ)ΨS,QΓ ]−1fΓ ,j (3.31)
ΨS,Q is a set of quasi-static modes, being the inverse of the equivalent tuned system matrix
(KS−ω2c
MS). By using this representation of the quasi-static term , we don’t need the stiffness
and mass matrices of all the mistuned system, but only ones on the mistuning DOFs and ones
of the tuned-system, the latter being still easy to compute with cyclic symmetry analysis.

3.4 Combination of both methods 13
Note that this method is perfectly adapted for this project, where many mistuned systems
need to be analyzed, because the quasi-static modes ΨS,Q can be used for any different ma-
trices Kδ −ω2c
Mδ.
The mode-acceleration method allows for the construction of a new basis which can ap-
proximately span the space of mistuned system’s normal modes. The mass and stiffness ma-
trices of the mistuned system projected in this basis are given by:
µsyn = (ΦS −ΨS,Q GQΓ )
T(MS +Mδ)(ΦS −ΨS,QGQΓ )
κsyn = (ΦS −ΨS,QGQΓ )
T(KS +Kδ)(ΦS −ΨS,Q GQΓ )
(3.32)
where GQΓ is the set of all the g
QΓ ,j vectors.
3.4 Combination of both methods
The two reduction modeling techniques are combined in order to study the effects of
small parameter variations on geometrically mistuned bladed disks. Here we use the com-
pensated modes (ΦS−ΨS,QGQΓ ) to compute the modal participation factors of the CMM method.
The reduced order model mass and stiffness matrices due to geometric mistuning are first
calculated using Equation (3.32). The total reduced mass and stiffness matrices are then given
by:
µsyn =µsynL +
N∑
n=1
qmn
TUm TMδSn
Um qmn
κsyn =κsynL +
N∑
n=1
qkn
TUk T
KδSn
Uk qkn
(3.33)
Matrices Um and Uk are computed in the same way as in the CMM section, whereas the
modal participation factors are given by:
qmΦ,n =Φ
Bn
T(Mn ,Γ +MδL
n)(ΦS
n ,Γ −ΨS,QG
Qn ,Γ )
qkΦ,n =Λ
Bn
−1Φ
Bn
T(Kn ,Γ +KδL
n)(ΦS
n ,Γ −ΨS,QG
Qn ,Γ )
qΨ ,n = (ΦSn ,Γ −Ψ
S,QGQn ,Γ )b
(3.34)
where Mn ,Γ and Kn ,Γ are the nominal mass and stiffness matrices of the n th sector.

14 Model order reduction methods

4Quasi-static mode computation
The first objective of this project is to look for a fast and efficient way to calculate a set of
quasi-static modes used in reduced order modeling of a turbine bladed disk subject to large
mistuning. At this point, upon a cyclic analysis run in ANSYS, a set of harmonic blocks of
mass and stiffness matrices is recovered in the binary format. They are read in FORTRAN
code and inverted block per block, using full matrix BLAS3 routines.
In the beginning, it was proposed to use an ANSYS Parametric Design Language script
(APDL), employing an efficient ANSYS solver, to compute the quasi-static attachment modes.
Because ANSYS solver does not support cyclic symmetry harmonic analysis with a non sym-
metrical external loading, this approach is not feasible with the standard APDL commands.
Nevertheless, it could be achieve through a complex script, nevertheless much more time-
consuming its equivalent Fortran code.
Consequently, the optimization of speed and memory usage of the code under develop-
ment, by using new thread-safe parallel sparse DSS routines of Intel MKL is chosen here.
4.1 Structure of the code
The aim of this code is to quickly calculate the free and forced response of a bladed disk,
which can be subject to small and large mistunings. Its global structure is reviewed in fig-
ure 4.1. It combines the CMM model-order reduction method (for small mistuning) with
quasi-static modes compensation technique (for large mistuning). Several input files, com-
puted with commercial ANSYS FEM software, are required:
− the tuned-system normal modes with harmonic blocks of mass and stiffness matrices
in real-cyclic coordinates. They are obtained by running a modal analysis in cyclic
symmetry on a single sector 4,372 DOFs model.
− the cantilevered-blade modes (used in the small mistuning projection) and blade alone
mass and stiffness matrices. They are obtained by running a modal analysis on a tuned
blade 23,496 DOFs model.

16 Quasi-static mode computation
− the mistuned cantilevered-blade modes (also used in the small mistuning projection)
and mistuned blade mass and stiffness matrices. They are obtained by running a modal
analysis on each blade with geometrical mistuning.
Then, these input files are used to create the reduced matrices of the mistuned system, which
allows the computation of required results so they can be written into output files. Accord-
ing to user need, these can be natural frequencies, maximum displacement norms after a
harmonic analysis, and forced response statistical results after a Monte-carlo analysis.
4.2 Code optimization
We now focus on the quasi-static computation in order to improve its speed. To do so,
the matrices format used during the inversion of matrix of type (KS−ω2c
MS) is translated to a
special sparse format, much more cost-effective in memory.
4.2.1 Initial code
As the quasi-static modes ΨS,Q are the inverse the equivalent stiffness matrices of the
tuned system (KS −ω2c
MS), the cyclic symmetry technique can be used. Therefore, in cyclic
coordinate, we have:
ΨS,QΓ= Bdiag
h=1...H[(Kh −ω2
cMh )
−1Γ] (4.1)
The quasi-static modes are computed on the blade DOFs, because in physical domain we
only need those partitions of ΨS,Q that correspond to mistuned DOFs of each blade:
ΨS,Qk ,m = (Fk ⊗ I)Ψ
S,QΓ(FT
m⊗ I) (4.2)
Where the subscript k denotes span all the tuned blades, the subscript m spans only the
mistuned blades.
Thus, within a loop on the harmonics of the system, the tuned blades stiffness and mass
matrices are retrieved in ANSYS format, which means binary format, and translated into a
sparse format (detailed in the next subsection). Thanks to the nodal equivalence table, the
matrices are reorganized in full array format. The matrices (Kh −ω2c
Mh ) are created and their
inversion can be calculated, using the full matrix BLAS3 routines. The computation of the
matrices (ΨS,QΓ ,h )
TMhΨS,QΓ ,h is also executed, and finally the results are respectively written in
output files, to be used later.
4.2.2 Intel MKL DSS routines
The problem with the initial code is that the inversion of the matrices (KS −ω2c
MS) takes
too much times, and a lot of memory resources are wasted because dominance of the several
zero elements of these matrices. To resolve this situation, the use of a matrix sparse format ?
seems to be appropriate. But in this case, the routine called to compute the inversion must

4.2 Code optimization 17
Quasi-staticmodes computationfor each harmonic
Calculation of the compensatedmodes ΦS −ΨS,Q G
QΓ
Projection of the large mistuningKδL and MδL onto the new
subspace
Calculation of the modeparticipation factors of CMM,
using ΦS −ΨS,Q GQΓ Projection of
small mistuning KδS and MδS
System solving:(κ
synL +κ
s y n
S ), (µsynL +µ
s y n
S )
Output
Harmonic Matrices KS and MS
Centering frequency ωc
Tuned normal modes
Rogue blades matrices Km and Mm
Sector matrices KTuned, MTuned
Tuned blade cantilevered modes
Rogue blade cantilevered modes
OPERATIONS INPUT FILES
Figure 4.1 - Structure of the code

18 Quasi-static mode computation
be able to abide to this kind of matrix format. That is why the new thread-safe parallel sparse
routines of Intel Math Kernel Library (Intel MKL) seem to be interesting in this case. Further-
more, these routines can parallelize on multi-core processors, which highly accelerate the
computation. Intel MKL provides Fortran routines and functions that perform a wide variety
of operations on vectors and matrices, including sparse matrices and interval matrices. Here
are the suitable routines that can be used for this project:
− PARDISO (Parallel Direct Sparse Solver Interface): software for solving large sparse
symmetric and asymmetric linear systems of equations on shared memory multipro-
cessors.
− Direct Sparse solver (DSS) Interface Routines: implements a group of user-callable rou-
tines that are used in the step-by-step solving process and exploits the general scheme
described in Linear Solvers Basics for solving sparse systems of linear equations.
These two routines are integrated into a test-code module, in order to compare their speed.
Different numbers of processors are used, and two compiler modes are studied too: the clas-
sical debug mode of Microsoft Visual Studio, and the release mode, without any debug infor-
mation in generated assembly code to make the computation faster and more efficient. Two
0
20
40
60
80
100
120
140
1 2 4 8
com
pu
tati
on
alti
me
(s)
Number of processors used
DSSPARDISO
(a) Debug mode
1 2 4 8
0
20
40
60
80
100
120
140
Number of processors used
(b) Release mode
Figure 4.2 - Computational time comparison
problems arise in figure 4.2. The first one is that there are no concrete differences of time be-
tween the use of one processor and the use of several processors, which is not really logical.
Secondly, we can see that both routines are much slower in release mode, which is not logical
either. Intel has been contacted about these MKL routines insufficiencies, but to date, no new
MKL version has been able to better use the multi-processing computation of their routines,
or to run it faster in the release mode.
For the moment, these graphs demonstrate that in this case, the DSS routines are more
efficient than the PARDISO routines, so these are the ones which are retained. This solving
process is divided into six phases, that basically starts by reading the (Kh−ω2c
Mh )matrix, then

4.2 Code optimization 19
create and dimension a solution array xh and finish by solving the equation:
xh = (Kh −ω2c
Mh )−1Γ
(4.3)
An example of MKL-DSS use to compute quasi-static modes is given in appendix A.
The main difficulty using DSS solver is that it requires matrices in CSR format (detailed
in the following part), so all the input matrices have to be translated from sparse coordinate
format to CSR format.
4.2.3 Matrix formatsSparse coordinate format
A matrix M written in sparse format is a Fortran type consisting of three arrays:
− a real array, containing the real values of nonzero elements of M.
− an integer array containing their row indices.
− a second integer array containing their column indices.
Thus, the size of these arrays is the number of non-zero elements of the matrix M. Note that
if the matrix is symmetric, its sparse format will only contain its lower part elements or the
contrary. This format is very interesting in this project from the memory requirement point
of view, because the used stiffness and mass matrices are symmetric, and both contain both
many zero elements.
Compressed Sparse Row (CSR) format
A matrix M written in CSR format is a sparse matrix whose structure consists of three
arrays:
− a real array containing the non-zero elements of M, stored row by row. Thus, the size of
this array is the number of non-zero elements of the matrix.
− an integer array containing the column indices of the non-zero elements as stored in
the previous array. Thus, the size of this matrix is the same as the previous one.
− an integer array containing the pointers to the beginning of each row in the two previ-
ous arrays, that is to say the position in the two previous arrays where each concerned
row starts. The size of this array is the size of the matrix M plus one.
This format is more memory costless efficient compared to sparse coordinate format, thanks
to the size of its third array. Furthermore, it is the only one supported by the MKL DSS rou-
tines.

20 Quasi-static mode computation

5Large mistuning
The purpose of this section is to prove the accuracy and robustness of the existing Fortran
code when computing the free response analysis of a large mistuned bladed disk. Even if the
code can handle large and small mistuning at the same time, it is important to accurately
approximate the eigenspace of the system with large mistuning only, before adding small
mistuning variations. Regarding the mode-acceleration method given in chapter 3:
x(ω)≃ (K−ω2c
M)−1f(ω)+
L 2∑
i=L 1
�ω2−ω2
c
ω2i −ω2
c
�Φ
Ti
f(ω)
ω2i −ω2
Φi (5.1)
one reminds that one of the difficulty of this method is to chose the appropriate tuned-system
natural frequencies [L1; L2] so that free response results can be obtained in an accurate and
quick way. Thus, the iterative scheme becomes necessary to prove the existence of a conver-
gence to the exact values. Note that a proper selection of the centering frequency could help
to accelerate this convergence.
By adopting Lim large mistuning pattern, we first demonstrate that increasing the number
of retained tuned normal modes always leads to a convergence of the ROM response to the
full model response, whatever the number of rogue blades is. We then introduce new mistun-
ing patterns, in order to demonstrate that the code is able to incorporate different mistuning
patterns. Finally, we introduce a large mistuning scaling coefficient, to study the effects of
increasing the distortion.
5.1 Description of the original FEM model
The FEM model, illustrated in Figure 5.1, on which the next test-cases are based has 29
blades, forming the second stage of a four-drum compressor used in an advanced gas turbine
application. It is constructed with standard eight-node linear brick elements and has 126,846
DOFs. The rotor model is clamped at the ribs located at the outer edges of the disk, which is a
rough approximation of boundary conditions due to neighboring stages. Figure 5.2 displays
the free vibration natural frequencies of the tuned bladed disk versus the number of nodal
diameters. Blade-dominated mode families studied here are characterized on the right-hand

22 Large mistuning
Figure 5.1 - FEM of the studied tuned bladed disk
side of the horizontal lines, where F denotes a flexural bending mode, T denotes a torsion
mode, S denotes a stripe mode, and R denotes elongation in the radial direction. The next
Nodal Diameter
Nat
ura
lFre
qu
ency[H
z]
0 2 4 6 8 10 12 140
1
2
3
4
5×104
37 kHz
30 kHz
26 kHz
43 kHz
16.5 kHz
14.5 kHz
Mix 4F/1R
2S3T
3F
1S
2T
2T/2F
2F1T
1F
5S4S3S
Figure 5.2 - Tuned bladed disk natural frequencies versus number of nodal diameters
studies are wanted to be focusing on the approximation of the four natural frequency families
3F, 3T, 2S and the mix 4F/1S. Thus, all the natural frequencies between 26 and 43 kHz (i.e.

5.2 Convergence criteria 23
136 according to figure 5.2) are initially calculated through an ANSYS modal analysis of the
perfectly tuned bladed disk1.
5.2 Convergence criteria
The comparison between the natural frequencies (and its associated normal modes) com-
puted with the ROM method and the ones computed with the full model is based on two
criteria:
• the natural frequency error (in percents), which is the most obvious way to make the
comparison between two modal analysis responses. The problem is, even if both nat-
ural frequencies seems to be equivalent according to this criterion, the normal modes
respectively associated don’t necessarily correlate. Therefore, a second criterion has to
be introduced.
• the Modal Assurance Criterion (MAC), used in this study in order to compare the mode
shapes of the two computing methods. It provides a measure of the least-squares devi-
ation of the points from the straight line correlation. This parameter, which is a scalar
quantity, is defined by:
MACF,R =
��ΦTRΦF
��2
(ΦTRΦR )(Φ
TFΦF )
(5.2)
with ΦF the normal modes computed with the full model, and ΦR the normal modes
retained in the reduced model. Whereas MAC is a useful means of quantifying the com-
parison between two sets of mode shape data, they do not present the whole picture so
they must always be associated to the natural frequency error criterion.
5.3 Convergence study with a unique rogue blade
The aim of this study is to prove the existence of a convergence for the free response of
the reduction modeling method, using the mistuning pattern (see figure 1.2) introduced by
Sang Ho Lim in the context of his PhD ?. The number of mistuned DOFs where mistuning
is present due to the geometry deviation is 594. This pattern was used to validate the Static-
Mode Compensation (SMC) method for large mistuning, in the case where the bladed disk
featured only one rogue blade.
5.3.1 Comparison of three mistuning configurations
In what follows, the natural frequencies and normal modes are first calculated for a bladed
disk featuring this mistuning pattern, from one mistuned blade to three adjacent ones (see
figure 5.3), in the frequency range of [26;43] kHz. As the number of retained tuned-system
1Note that every studied mistuned disk is created through the ANSYS software through an APDL script (see appendix B)applied on the FEM model of a single sector.

24 Large mistuning
(a) Bladed disk featuring 2 mistuned blades
(b) Bladed disk featuring 3 mistuned blades
Figure 5.3 - Introduction of several mistuned blades
natural frequencies must be at least the number of frequencies that one wants to study, these
136 normal modes are used to project the reduced-order model. Regarding the formula given
in the section 3, the centering frequency’s theoretical value is supposed to be 35,532 Hz. But,
as it can be seen on the figure 5.2, there is a risk that ωc can be equal to one of the 2S or 3T
family tuned natural frequencies. Therefore, this value is changed to 33 kHz, which further-
more allows to precisely approximate the 2S/3T frequencies.
The results for the natural frequency errors and the MAC values are presented in the fig-
ure 5.4, from which several conclusions can be deduced:
1. The frequencies error and the MAC values of the blue curves shows that the actual code
is well adapted for the case where the disk contains only one mistuned blade, and fur-
thermore 136 tuned system normal modes are enough to have convergence between
ROM and full model. The results obtained by Lim with the SMC method are also ob-
tained here with this new method.
2. In these three cases, the results for the natural frequency errors are very good. The
worst value, obtained for the 3 mistuned blades case, is 0.17%, which is not perfect but
acceptable. Note that the error increases proportionally to the number of mistuned
blades.
3. The MAC values show that the worst case seems to be the second one. Its worst value
is 0.84, which could be improved. The observation that an even number of mistuned

5.3 Convergence study with a unique rogue blade 25
blades seems to be harder to approximate with the selected basis is made.
4. Still looking at the MAC values, we can note the presence of problematic modes on the
right of the curve, which are the modes from 35,057 Hz to 42,098 Hz. And regarding the
figure 5.2, this part of the frequency range corresponds to a high-concentrated zone of
tuned-system normal modes, most of all belonging to the mix 4F/1R family. This family
must be hard to approximate, and the centering frequency value seems to too far to do
it properly.
Mode number
Freq
uen
cyer
ror
(%)
1 MB2 MB
3 MB
20 40 60 80 100 1200
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
(a) Natural frequency errors
Mode number
MA
Cva
lues
20 40 60 80 100 1200.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
(b) MAC values
Figure 5.4 - Comparison of three mistuning configurations, from 1 to 3 mistuned blades respec-tively
5.3.2 Reduction of the frequency band of interest
Because of the last conclusion, it is decided that the rest of the study focus on the approx-
imation of the families 2S and 3T. Thus, the natural frequencies are computed in the band
[30;37] kHz, where their number is 71. The case with 4 mistuned blades is added, in order
to try to validate the assumption made on the parity. The new results are reported in the
figure 5.5. It shows first that the frequency errors are globally good (maximum error equal
to 0.02 %). Their four curves have the same problematic regions of modes, between the 1st
and 10th modes, and between the 40th and 45th modes, and the error increases again propor-
tionally to the number of mistuned blades. On the other hand, the MAC values contradicts
the fact that an even number of mistuned blades creates worst results than an odd number.
Indeed, we can see that the worst configuration here seems to be the third case (3 mistuned
blades), where modes 5 and 6 are not well approximated. Thus, a convergence study is made
on this case in the next part.
5.3.3 Convergence study on the 3 mistuned blades case
Here we study the convergence of ROM results to FEM ones by augmenting the projection
basis with neighboring modes. Each test case represents an addition of one or several tuned-

26 Large mistuning
Mode number
Freq
uen
cyer
ror
(%)
1 MB2 MB3 MB4 MB
10 20 30 40 50 60 700
0.005
0.01
0.015
0.02
0.025
(a) Frequency errors
Mode number
MA
Cva
lues
10 20 30 40 50 60 700.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
(b) MAC values
Figure 5.5 - Comparison of four different configurations, from 1 to 4 mistuned blades
system normal modes family. Note that asymmetric addition has the potential to increase the
error of approximation meaning ROM of a greater order can have a higher error of approxi-
mation compared to smaller order ROM. The results are summarized in figures 5.6 and 5.7,
and the table 5.1 relates the frequency bands used with tuned-system modes families.
Freq. range (kHz) Number of modes Mode families
[30;37] 71 2S & 3T
[30;43] 102 2S & 3T & 4F/1R
[26;37] 105 2S & 3T & 3F
[26;43] 136 2S & 3T & 3F & 4F/1R
[26;47] 202 2S & 3T & 3F & 4F/1R & 3S & 4S
[22;44] 199 2S & 3T & 3F & 1S & 4F/1R & 3S
[22;47] 236 2S & 3T & 3F & 1S & 4F/1R & 3S & 4S
Table 5.1 - Tuned-system natural frequencies and normal modes retained for every computation
The observation made are follows:
• The attention is first brought on the frequency errors results. The results start to be
really good when the frequency range [26;43] kHz is used, which resulted in when the
families 3F and 4F/1R were added to the frequency range of interest. But, regarding the
center peak, the results are worst when using the band [30;43] kHz than the original
band [30;37] kHz. It means than introducing the left frequency family 3F deteriorate the
results, and it has to be compensated by the add of right families like 4F/1R for instance.
This is confirmed by the results with the [26;47] kHz band which are better than ones
with [26;47] kHz band, so the inclusion of the left family 1S is problematic too.
• The results obtained for the MAC values confirms was was found before. The inclusion
of the families 3F and 1S is problematic, and has to be compensated by right.

5.4 Convergence study with different patterns 27
Mode number
Freq
uen
cyer
ror
(0.1
%)
71 modes102 modes
105 modes
136 modes
202 modes
236 modes
10 20 30 40 50 60 700
0.05
0.1
0.15
0.2
0.25
0.3
(a) Frequency errors
Mode number
Freq
uen
cyer
ror
(%)
10 20 30 40 50 60 700
1
2
3
4
5
6
7
8
(b) Frequency errors zoom
Figure 5.6 - Frequency errors convergence for a disk featuring 3 mistuned blades
Mode number
MA
Cva
lues
10 20 30 40 50 60 700.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
(a) MAC values
Mode number
MA
Cva
lues
10 20 30 40 50 60 700.9986
0.9988
0.999
0.9992
0.9994
0.9996
0.9998
1
(b) Zoom on MAC values
Figure 5.7 - MAC values convergence for a disk featuring 3 mistuned blades
The main conclusion of this study is that the asymmetric inclusion of modes families might
potentially increase the error of approximation for the modes closer to the opposite side of
the studied band. Thus, even if the convergence of the code has been proven when taking a
very large tuned frequency band, the retained modes should be chosen in an wise way instead
of blindly widening the frequency range, which make the computation less efficient.
5.4 Convergence study with different patterns
New mistuning patterns are introduced here, in order to demonstrate that the code is able
to support different modifications of geometry, distributed around the disk in a random way.
Therefore, two new patterns are introduced, presented in the figure 5.82.
2Both patterns were created in order to imitate physical impact against bird or ice. Only the mesh could be modified andthe generation of these new patterns was not simple. A static analysis was first carried out on a fundamental sector in orderto distort it and retrieve the displacement field. This latter was mapped to the original sector in order to obtain a new largemistuned sector.

28 Large mistuning
5.4.1 Study on the frequency band [30;37] kHz
The convergence of ROM is studied here for a mistuned bladed disk featuring the three
different mistuning pattern, as presented in the figure 5.8. One wants to approximate the
1
2
3
7th blade
25th blade
29th blade
Figure 5.8 - Bladed disk featuring three different patterns of mistuning
normal modes of this mistuned disk in the frequency band [30;37] kHz, in order to study
the 2S and 3T families. The retained tuned-system natural frequencies are increased in a
symmetric way, according to the conclusions of the last section, and it is found that the con-
vergence exists and that the most accurate frequency band is again [26,47] kHz (containing
202 modes). This conclusion can be verified by the figure 5.9, presenting the frequency er-
rors and the MAC values of two different ROM computations with the full model. Thus, the
code is able to compute modal analysis on bladed disk featuring different kinds of mistuning
pattern.
A little investigation is made then to try to explain the presence of approximations errors
within the ROM, when using only 71 tuned-system normal modes for projection. It is pointed
out that the modes with higher error of approximation and slower convergence rate are those
strongly localized to a single blade. Some of them that appear in [30;37] kHz frequency range
are depicted in figure 5.10. In particular note 41st mode located in the middle of the frequency
range and localized to 7th blade. The errors at the end of the analyzed frequency range are
typical for any modal projection approach with modal truncation because the modes in the
middle are more accurately represented than those at the end.

5.4 Convergence study with different patterns 29
Mode number
Freq
uen
cyer
ror
(0.1
%)
71 modes
202 modes
10 20 30 40 50 60 700
0.1
0.2
0.3
(a) Frequency errors
Mode number
MA
Cva
lues
10 20 30 40 50 60 700.995
0.996
0.997
0.998
0.999
1
(b) MAC values
Figure 5.9 - Frequency errors and MAC values results for the different mistuning patterns case
(a) mode 41, 34204 Hz, localization on blade 7 (b) mode 67, 34791 Hz, localization on blade 25
(c) mode 38, 33744 Hz, localization on blade 29 (d) mode39, 33992 Hz,localization on blade 7
Figure 5.10 - Highly localized modes

30 Large mistuning
5.4.2 Study on the frequency band [30;37] kHz
We then make the same kind of investigation on a smaller and lower frequency band,
to verify the accuracy of the QSMC in this case. Figure 5.11 depicts the natural frequency
errors and MAC values in the [14.5;16.5] kHz frequency band calculated with f c = 15390 Hz.
29 modes pare chosen for comparison with full FEM results. The errors in the frequencies for
Mode number
Freq
uen
cyer
ror(
%) 29
6094
5 10 15 20 250
2
4
6
8
(a) Frequency errors
Mode number
MA
Cva
lues
5 10 15 20 250.9995
0.9996
0.9997
0.9998
0.9999
(b) MAC values
Figure 5.11 - Comparison of results between FEM and ROM for [14.5;16.5] kHz region
the smallest model is less than 0.01 % and the worst MAC value is 0.9995. Again the maximum
error was observed for the 29th mode, which is a highly localized to 7th blade mode. Clearly,
the error has been significantly reduced by increasing the number of modes included in the
basis. The important point to note is that QSMC better approximate the lower frequency
modes and those of belonging to an isolated family, which results in very compact models of
the number of blades order.
5.5 New technique for the selection of the retained tuned modes
In this section, we try to find a method to select in an intelligent way the tuned-system
normal modes used in the projection of the quasi-static modes compensation method.
The aim is to determine the most important tuned-system normal modes with higher
contribution to the convergence of the ROM results to FEM results. The case study is a disk
containing one mistuned sector, with the pattern No.3 multiplied by the coefficient 0.4. The
original code has specifically been modified for this case, which allows now to select any
wanted mode out of the frequency range of interest, instead of only being able to add adja-
cent ranges. Note that the study focus back to the frequency band [26;43] kHz and even if it
does not represent a ROM of realistic size, the test case clearly demonstrates the convergence
trends.
A first preliminary study is made, in order to find the frequency range where we can con-
sider that the convergence is acceptable. Several computations finally give the frequency
range [20;50] kHz (equivalent to 330 modes), where the convergence seems to be satisfactory,
looking at the figure 5.12. Thus, the convergence of this mistuned model is obviously proven
here. The following step of this study is then to find within this frequency range the most

5.5 New technique for the selection of the retained tuned modes 31
Mode number
Freq
uen
cyer
ror(
%)
136 modes330 modes
20 40 60 80 100 1200
0.2
0.4
0.6
0.8
1
Mode number
MA
Cva
lues
20 40 60 80 100 1200.5
0.6
0.7
0.8
0.9
1
Figure 5.12 - Results of the range [20;50] kHz for the test-case
important modes contributing to the convergence. A new technique is proposed here, which
consists of calculating the Modal Participation Factor (MPF) between the mistuned modes
and the tuned of the system (obtained via the ANSYS solver). Essentially, we are calculating
the cosines of canonical angles between tuned and mistuned normal modes defined on the
space Rn equipped with the inner product (x ,y )M = x T My for any two vectors x ,y ∈ Rn . Its
definition is :
cos(Θ) =(Φm,Φt)M
‖Φm‖M ‖Φt‖M=Φ
mTMtΦt
ΦmTMtΦ
m(5.3)
where Mt denotes the tuned system mass matrix, Φm a mistuned system normal mode, and
Φt a tuned system normal mode. Now, looking more closely at the curve for the 136 tuned
modes projection in the figure 5.12, 32 mistuned modes are considered as problematic (≈hard to approximate) for both MAC values and frequency errors. Therefore, their MPFs with
all the tuned-system normal modes are plotted, in order to find the tuned-modes out of the
frequency range [26;43] kHz that could contribute the most to the improvement of approxi-
mation. Each time one of these modes appears in the MPFs curve, this is reported in a data
tab. The figure 5.13 gives an example of a MPFs curve, and how the selection of the important
modes is made. Finally, 69 tuned-system normal modes out of [26;43] kHz are retained, and
the projection is made with these 69+136=205 modes, to observe the frequency errors and
the MAC values with the full model, reported in the figure 5.14. One can see that compared
to the original projection, adding those 69 selected modes improves the results: the worst
frequency errors is reduced in half, and the MAC values are all now above 0.95. But although
this results allows to prove the validity of this new method, they are not so good than using all
the modes in the frequency range [20;50] kHz. It shows that all the modes in this latter range
have a role to play for the convergence of the ROM results toward FEM, but some of them can
be enough to be closer to the full model.
These results open new ways of research on the selection of the tuned-system normal for
the projection. Indeed, instead of including wide frequency ranges that are not really cost-
effective in computation, one can find an intelligent way to select the additional modes.

32 Large mistuning
Tuned-system mode number
Mo
dal
par
tici
pat
ion
fact
ors
Homologue mode inthe tuned-system
( f = 27,161 Hz)
Most contributingmodes, out of the
frequency range ofinterest
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
Figure 5.13 - MPFs graph for the mistuned-system mode associated to the frequency: 27079 Hz
Mode number
Freq
uen
cyer
ror
136+69 selected modes136 modes
20 40 60 80 100 1200
0.2
0.4
0.6
0.8
1
(a) Frequency errorsMode number
MA
Cva
lues
20 40 60 80 100 1200.5
0.6
0.7
0.8
0.9
1
(b) MAC values
Figure 5.14 - Results with the selected out of frequency range of interest modes
5.6 Effects of distortion magnitude
The next study on the other pattern is quite different. As the convergence has indeed
been proven before, we decide to study the influence of a mistuning amplitude coefficient,
introduced on the displacement field used to create the pattern. The figure 5.15 presents
the evolution of blade distortion. For each case, frequency errors and MAC values are calcu-
lated, by projecting the ROM method on the 136 tuned-system normal modes contained in
the [26;43] kHz frequency range. The results can be visualized in the figure 5.16. The first ob-
servation which can be made is that the evolution of the frequency error graph is proportional
to the coefficient amplification. That is to say that higher magnitude of distortion increases
error of approximation. But regarding the results for the MAC values, this assumption doesn’t
seem to hold true. One can note indeed that the results for the coefficient 0.2 are better than
for the coefficient 0.1. This leads to two important conclusions:
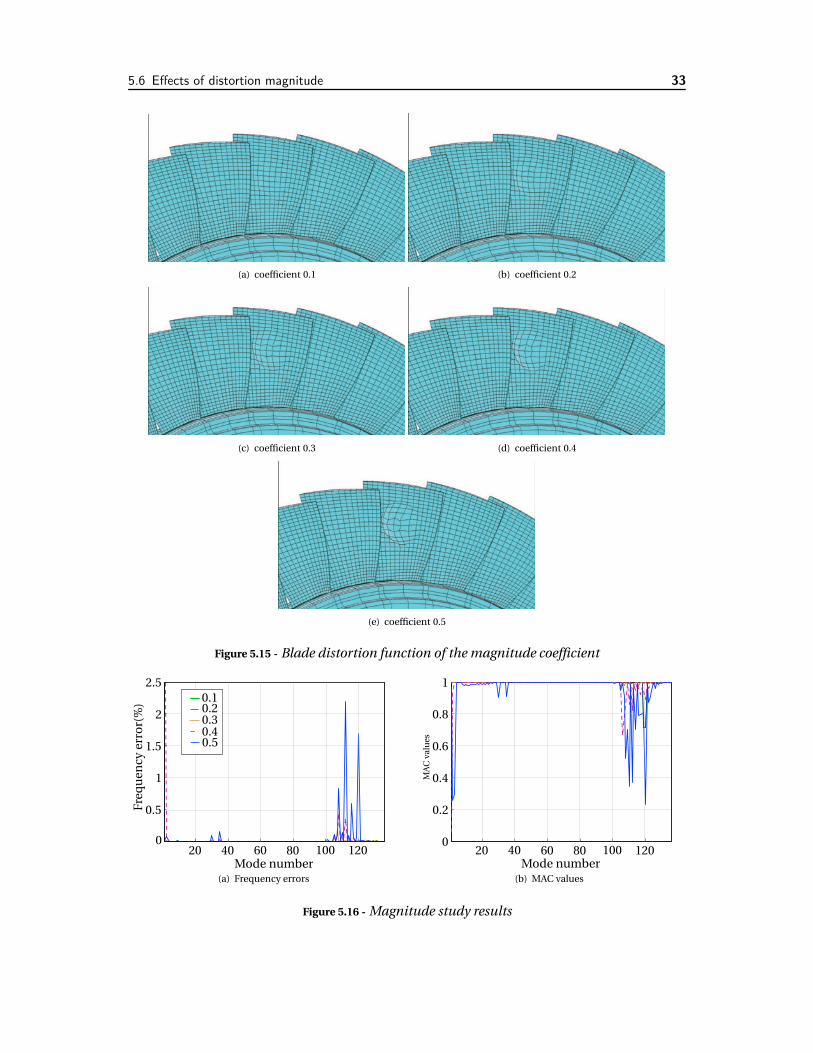
5.6 Effects of distortion magnitude 33
(a) coefficient 0.1 (b) coefficient 0.2
(c) coefficient 0.3 (d) coefficient 0.4
(e) coefficient 0.5
Figure 5.15 - Blade distortion function of the magnitude coefficient
Mode number
Freq
uen
cyer
ror(
%) 0.1
0.20.30.40.5
20 40 60 80 100 1200
0.5
1
1.5
2
2.5
(a) Frequency errors
Mode number
MA
Cva
lues
20 40 60 80 100 1200
0.2
0.4
0.6
0.8
1
(b) MAC values
Figure 5.16 - Magnitude study results

34 Large mistuning
• even a very localized perturbation to several DOFs can have a dramatic effect on the
perturbed system eigenpairs, creating harder modes to approximate.
• the scaling of geometry shape (selected for convenience) is not proportional to the am-
plitude of perturbation, defined by ‖M−1K‖.

6Forced response analysis
combining large and smallmistunings
In this chapter, QSMC and CMM techniques are used to compute the dynamic response of
a geometrically mistuned bladed disk featuring also small parameters variations. This is the
same disk used in the last chapter, in the section where the convergence of a bladed disk con-
taining different patterns of mistuning has been proved (see figure 5.8). But in this case, the
different colors of every blades have a signification: underline the presence of small mistun-
ing, introduced on the nominal Young’s modulus as:
En = E0(1+δen) (6.1)
where En is the new Young’s modulus of the n th blade, E0 is the original nominal Young’s
modulus and δen
is a non-dimensional mistuning value. The specific pattern used in this
case is shown in table 6.1. Although the proportional blade to blade stiffness variation intro-
duced by changing Young’s modulus of the blades is a very rough way to model random small
mistuning phenomena, it has been chosen for simplicity to validate the accuracy of the de-
velopped method. In this study the structural damping coefficient is set to 0.006, the modal
participation factors are calculated using 30 cantilevered-blade modes, with only a third of
them dominant.
Blade n 1 2 3 4 5 6 7 8 9 10
δen
5.704 1.207 4.67 -1.502 5.969 -3.324 -0.078 -1.688 0.242 -2.747
Blade n 11 12 13 14 15 16 17 18 19 20
δen
-3.631 -3.57 -6.31 -3.631 0.242 4.934 4.479 3.03 0.242 1.734
Blade n 21 22 23 24 25 26 27 28 29
δen
2.919 -0.328 0.086 -3.654 -3.631 -1.665 0.783 -1.169 -1.332
Table 6.1 - Eigenvalue mistuning pattern

36 Forced response analysis combining large and small mistunings
6.1 Code Validation
Despite the large changes in geometry the aerodynamics mistuning is neglected; the forc-
ing function applied corresponds to the 3 and 5 nodal diameter excitation for a 71 tuned-
modes projection ROM, in the [30;37] kHz region, and 2 and 3 engine order (EO) excitation
for a 71 tuned-modes projection ROM in the [14.6;16.6] kHz region. An arbitrary load is ap-
plied at a tip of each blade.
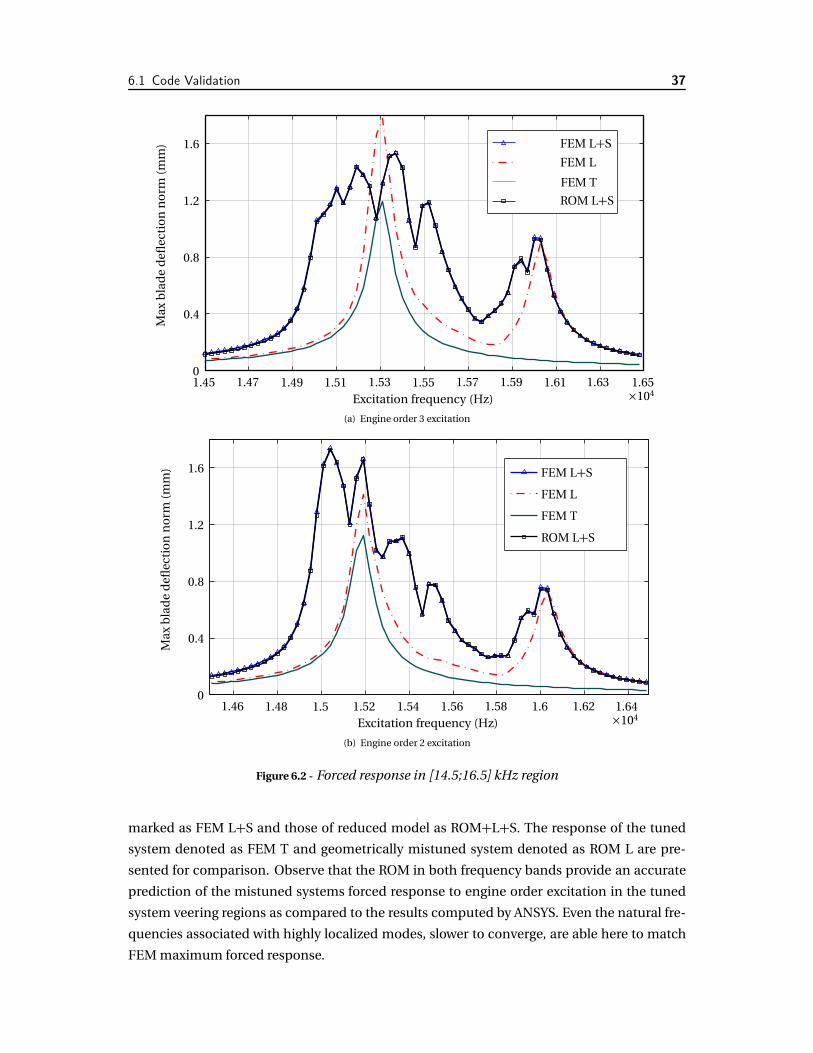
Figure 6.1 shows the euclidiean displacement norms for maximum responding blade ver-
sus frequency of excitation from 33 kHz to 36 kHz, for EO 5 and EO 3 respectively. The results
for [14.5;16.5] kHz region for EO 3 and EO2 are depicted in figure 6.2. ANSYS results are
Excitation frequency (Hz)
Max
bla
de
defl
ecti
on
no
rm(m
m)
FEM L+S
FEM L
FEM T
ROM L+S
3.3 3.35 3.4 3.45 3.5 3.55 3.6×104
0
0.4
0.8
1.2
(a) Engine order 5 excitation
Excitation frequency (Hz)
Max
bla
de
defl
ecti
on
no
rm(m
m)
FEM L+S
FEM L
FEM T
ROM L+S
3.3 3.35 3.4 3.45 3.5 3.55 3.6×104
0
0.4
0.8
1.2
(b) Engine order 3 excitation
Figure 6.1 - Forced response in [33;36] kHz region
6.1 Code Validation 37
Excitation frequency (Hz)
Max
bla
de
defl
ecti
on
no
rm(m
m) FEM L+S
FEM L
FEM T
ROM L+S
1.45 1.47 1.49 1.51 1.53 1.55 1.57 1.59 1.61 1.63 1.65×104
0
0.4
0.8
1.2
1.6
(a) Engine order 3 excitation
Excitation frequency (Hz)
Max
bla
de
defl
ecti
on
no
rm(m
m) FEM L+S
FEM L
FEM T
ROM L+S
1.46 1.48 1.5 1.52 1.54 1.56 1.58 1.6 1.62 1.64×104
0
0.4
0.8
1.2
1.6
(b) Engine order 2 excitation
Figure 6.2 - Forced response in [14.5;16.5] kHz region
marked as FEM L+S and those of reduced model as ROM+L+S. The response of the tuned
system denoted as FEM T and geometrically mistuned system denoted as ROM L are pre-
sented for comparison. Observe that the ROM in both frequency bands provide an accurate
prediction of the mistuned systems forced response to engine order excitation in the tuned
system veering regions as compared to the results computed by ANSYS. Even the natural fre-
quencies associated with highly localized modes, slower to converge, are able here to match
FEM maximum forced response.

38 Forced response analysis combining large and small mistunings
Note that the introduction of large mistuning in the studied disk generate the presence of
additional resonance peaks in both frequency band, and for the different EOs. Furthermore, if
we take the example of the frequency region [33;36] kHz, we can see that the additional peaks
are situated at frequencies associated with rogue-blade dominated modes of the mistuned
disk. Thus, the figure 6.1 shows that ROM has accurately predicted those problematic modes.
6.2 Monte-Carlo analysis
The goal of this study is two-fold:
1. Validation of the developed code and demonstration of its computational power, as-
sessment of time necessary for a given size problem.
2. Assessment of sensitivity of the selected geometrical mistuning to the additional small
random mistuning.
Validation 1
The simulation consists of a frequency sweep between 33 KHz and 36 KHz with 10 Hz
step for 100 different mistuning patterns obtained from Gaussian distribution; different small
mistuning levels (spanning from 1% to 15 %) are applied to both geometrically mistuned sys-
tem and a perfectly tuned system. Forced response amplitudes of the mistuned system were
normalized with respect to maximum amplitudes of the tuned bladed disc under the same
excitation conditions. The damping loss factor was set to 0.006. Subsequently, a statistical
analysis is carried out to obtain the probability density and cumulative density functions of
the forced response for maximum values (determined with Weibull PDF fit that, see ?, repre-
sents the best match to the empirical distributions of forced responses obtained from the MC
simulations).
The 99th percentile of the maximum blade response amplitude under all engine order ex-
citations for geometrically mistuned system and tuned system respectively are depicted in
figures 6.3 and 6.4. From the results it is evident that the normalized forced response ulti-
mately decreases as the small mistuning level is increased, and dramatically varies depending
on the engine order of excitation, with maximum at EO 1 for both cases.
The effect of the addition of geometrical mistuning as a difference between the two test
case results is presented in figure 6.5, with some selected EO excitations presented in fig-
ure 6.6 The results obtained indicate for example a reduction in the maximum forced re-
sponse of approximately 144%, from 0.18 at 1% level of small mistuning to -0.08 at 4% of
small mistuning, for EO 8 excitation.
As we can see there are both positive and negative effects of addition of that geometric
mistuning pattern, for EO 1, EO2, EO 8 there is the tendency of the forced response ampli-
fication factor to decrease and the contrary tendency is observed for EO 12 and EO 0. The
rest of nodal diameter excitation does not exhibit any noticeable change in forced response
amplification factor for a given geometrical mistuning pattern.

6.2 Monte-Carlo analysis 39
14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
5
10
15
1
1.5
2
2.5
3
Engine Order Excitaion
Mistuning, %
99
−th
Pe
rce
nti
le A
mp
li"
cati
on
Figure 6.3 - Small Mistuning Sensitivity Analysis on Geometrically Mistuned Disk for [33;36] kHz
14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
5
10
15
1
1.5
2
2.5
3
Engine Order Excitation
Mistuning, %
99
−th
Pe
rce
nti
le A
mp
li"
cati
on
Figure 6.4 - Small Mistuning Sensitivity Analysis for [33;36] kHz
Validation 2
Overall the 71 DOF ROM was solved 6750000 times, it took 4 hours on Intel XEON Quad
core 2.6 GHz platform with 4G memory, which demonstrates an acceptable computational

40 Forced response analysis combining large and small mistunings
14131211109876543210
2
4
6
8
10
−0.05
0
0.05
0.1
0.15
0.2
0.25
Small Mistuning, %
Di!erence, 33−36 KHz
Engine Order Excitation
99
−th
Pe
rce
nti
le A
mp
li"
cati
on
Figure 6.5 - Differences between the two test case results
1 2 3 4 5 6 7 8 9 10 11−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Small Mistuning,
99−t
h Pe
rcen
tile
Ampl
i!ca
tio
n
EO 12
EO 2
EO 0
EO 8
EO 1
Figure 6.6 - Difference for Selected EOs
time for practical experiments, with industrial size FEM designs.

7Conclusion
A general reduced-order modeling framework was developed by combining CMM and QSMC
methods to analyze geometrically mistuned disks undergoing small random mechanical vari-
ations.
Starting with a finite element model of an industrial turbomachinery rotor, the general
ROM was validated for large mistuning cases, in which one or several blade(s) was (were)
damaged and featured one or several significant geometric change(s) from the tuned de-
sign. It was observed that the estimated natural frequencies of the mistuned rotor converged
rapidly as the selected number of tuned-system modes was increased. Moreover, a study was
carried out in order to suggest how to select those additional tuned-modes in a more eco-
nomic way.
Also, the forced response results from the ROM showed excellent agreement with the FEM
results, and Monte-Carlo simulations have demonstrated that stochastic analysis can be re-
alized in a fast and efficient way, and that provides practical results for sensitivity to small
random mistuning study of geometrical mistuned bladed disks.
An interesting future work would be to optimize tuned-modes selection modes, in order
to anticipate the mistuned structure behavior without having convergence studies to realize.

42 Conclusion

AQuasi-static terms computation
module
This appendix presents the test-case used to make the comparison between MKL-DSS and
Pardiso, in order to present an insight of the MKL-DSS structure. Input matrices of a single
sector are retrieved from text files, and then the inversion giving the quasi-static modes is
computed.
program Calculate_Ansys_Bin
use mkl_dss
implicit none
real(8) :: CenterFreq, val
real(8), allocatable :: TempM(:,:), TempK(:,:), Psi(:,:),&
PsiMPsi(:,:), Temp(:,:), V(:,:), Mmao(:), Smao(:)
integer :: i, j, l, MaxDia, SectorDOFs, Harm, &
Sector_Nodes, MistdoFs, Blade_DOFs
real(8) :: x, t1, t2
integer, pointer :: Mmiao(:), Mmjao(:), Smiao(:), Smjao(:), perm(:)
integer :: k0, iad, i1, nnzK, nnzM, err1, nnz
integer :: ierr, lenS, lenSj
integer, parameter :: bufLen = 20
type(MKL_DSS_HANDLE) :: handle !allocate storage for the solver handle
real(8),allocatable :: statOUt( : )
character(15) :: statIn

44 Quasi-static terms computation module
integer :: buff(bufLen), Inter
integer, pointer :: indu(:)=> null(), iwk(:)=> null()
integer :: ii,jj,kk,count,
Allocation_Status = 0
real(8), parameter :: PI=3.1415926535897932384626433832795d0
integer(8) :: pt(64)
integer :: maxfct, mnum, mtype, phase, msglvl
integer(8) :: iparm(64)
integer :: idum
real(8) :: ddum
integer :: omp_get_max_threads
external :: omp_get_max_threads
data maxfct /1/, mnum /1/
Blade_DOFs = 832*3
CenterFreq = 33000.0d0
perm = 0
!========= Linear System Solver Mistuned DOFs Vector Allocation ==========
V = 0.0d0
j = 0
! read V from a text file
open(1,file=’Fold\V.txt’)
read (1,*) Sectordofs, MistdoFs
allocate(V(Sectordofs, MistdoFs))
do while (.NOT.EOF(1))
read (1,*) ii,jj, V(ii,jj)
end do
close(1)
! read M
open(2,file=’Fold\Mparsevalj.txt’)
read (2,*) nnzM
allocate (Mmao(nnzM))
allocate (Mmjao(nnzM))
do while (.NOT.EOF(2))
read (2,*) ii,Mmao(ii), Mmjao(ii)
end do
close(2)

45
allocate (Mmiao(SectorDOFs+1))
open(3,file=’Fold\Mparsei.txt’)
do while (.NOT.EOF(3))
read (3,*) ii,Mmiao(ii)
end do
close(3)
! read St
open(4,file=’Fold\Sparsevalj.txt’)
read (4,*) nnz
allocate (Smao(nnz))
allocate (Smjao(nnz))
do while (.NOT.EOF(4))
read (4,*) ii,Smao(ii), Smjao(ii)
end do
close(4)
allocate (Smiao(SectorDOFs+1))
open(5,file=’Fold\Sparsei.txt’)
do while (.NOT.EOF(5))
read (5,*) ii,Smiao(ii)
end do
close(5)
!======================= DSS Solver ====================================
! Initialize the DSS solver.
allocation_status=0
allocate(Psi(SectorDOFS,MistDOFs),stat=allocation_status)
if (Allocation_Status /=0) write(*,*) ’Harmonic mass allocation failed’
Psi=0.0d0
call cpu_time(t1)
write(*,*)’ DSS tic ’
err1=DSS_CREATE(handle, MKL_DSS_DEFAULTS)
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error =’,err1
! Define the non-zero structure of the matrix.
err1=DSS_DEFINE_STRUCTURE(handle,MKL_DSS_SYMMETRIC,Smiao(1:nnz),SectorDOFs,
SectorDOFs,Smjao(1:nnz),nnz)
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1

46 Quasi-static terms computation module
! Reorder the matrix.
err1=DSS_REORDER( handle, MKL_DSS_DEFAULTS, perm )
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1
! Factor the matrix
err1=DSS_FACTOR_REAL(handle,MKL_DSS_INDEFINITE,Smao(1:nnz))
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1
err1=DSS_SOLVE_REAL(handle,MKL_DSS_DEFAULTS,V,MistDOFs,Psi)
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1
! Print Out the determinant of the matrix
if (SectorDOFs.LT.nnz-1) then
allocate(statOut( 5 ))
statIn=’determinant’
call mkl_cvt_to_null_terminated_str(buff,bufLen,statIn)
err1=DSS_STATISTICS(handle, MKL_DSS_DEFAULTS, buff, statOut)
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1
write(*,"(’pow of determinant is ’(5F10.3))") (statOut(1))
write(*,"(’base of determinant is ’(5F10.3))") (statOut(2))
write(*,"(’Determinant is ’(E24.18))") (real((10**statOut(1))*statOut(2), 16))
deallocate(statOut)
end if
! Deallocate solver storage and various local arrays
err1=DSS_DELETE(handle,MKL_DSS_DEFAULTS)
if (err1/=MKL_DSS_SUCCESS) write(*,*)’DSS solver failed, error = ’,err1
!============== end of DSS solver ===========================================
write(*,*)’ DSS toc ’
call cpu_time(t2)
write(*,*)’ Time taken by DSS ’, t2-t1, ’seconds’
allocate(PsiMPsi(MistDOFs,MistDOFs))
allocate(tempM(SectorDOFs,MistDOFs))
call cpu_time(t1)
write(*,*)’ DSS tic ’
call mkl_dcsrmm(’N’,SectorDOFs,MistDOFs,SectorDOFs,1.0d0,’SUN’,Mmao,Mmjao,

47
Mmiao,Mmiao(2),Psi,SectorDOFs,0.0d0,tempM,SectorDOFs)
call dgemm(’T’,’N’,MistDOFs,MistDOFs,SectorDOFs,1.0d0,Psi,SectorDOFs,tempM,
SectorDOFs,0.0d0,PsiMPsi,MistDOFs)
write(*,*)’ DSS toc ’
call cpu_time(t2)
write(*,*)’ Time taken by PsiMPsi multiplication ’, t2-t1, ’seconds’
deallocate(tempM)
deallocate(Mmao,Mmiao,Mmjao,Smao,Smiao,Smjao,V)
end program Calculate_Ansys_Bin

48 Quasi-static terms computation module
BAPDL script for geometry
changing
This appendix presents the APDL script that allows to create the ANSYS FEM model of a
bladed disk by cyclic expansion of a single sector, adding one of the three mistuning patterns
on every wanted blade, computing the cantilevered-blade modes and stiffness and mass ma-
trices of every corresponding blade, and applying the random small mistuning.
/COM ----------------------------------------------------------------------
/COM GEOCHANGE.MAC
/COM ----------------------------------------------------------------------
! ANSYS Macro Creating full bladed disk model with geometric mistuning
! applied to selected blades, calculating normal modes and stiffness/mass
! matrices of corresponding blades for ROM input, as well as applying small
! random mistuning to the selected blades
!------------------------------------------------------------------------
! arg1 == BLD_I Component name for blade interior nodes
! arg2 == BLD_B Component name for blade boundary nodes
! arg3 == S_C Component name for bladed disk constraints
! arg4 == Fstart Starting frequency for cantilevered blade modal analysis
! arg5 == Fend End frequency for cantilevered blade modal analysis
! arg6 == nmode Number of cantilevered blade modes to calculate
! arg7 == Coeff1 First mistuning amplification coefficient
! arg8 == Coeff2 First mistuning amplification coefficient
!------------------------------------------------------------------------
BLD_I = arg1
BLD_B = arg2
S_C = arg3
Fstart= arg4
Fend = arg5

50 APDL script for geometry changing
nmode = arg6
Coeff1= arg7
Coeff2= arg8
alpha = 12.4137931
ns=nint(360./alpha)
*dim,mist,array,ns
!rogue blade distribution within the bladed disk, starting with
!blade 2 up to 1 through the last one
mist(1) = 0,1,0,0,0,0,0,0,0,0
mist(11)= 0,0,0,2,0,0,0,0,3,0
mist(21)= 0,0,0,1,0,0,0,0,0
!small proportional mistuning Young’s modulus variations
*dim,deltaYoung,array,ns
deltaYoung(1) = 0.05704
deltaYoung(2) = 0.01207
deltaYoung(3) = 0.04670
deltaYoung(4) = -0.01502
deltaYoung(5) = 0.05969
deltaYoung(6) = -0.03323
deltaYoung(7) = -0.00078
deltaYoung(8) = -0.01688
deltaYoung(9) = 0.00242
deltaYoung(10)= -0.02747
deltaYoung(11)= -0.03631
deltaYoung(12)= -0.03570
deltaYoung(13)= -0.03631
deltaYoung(14)= -0.03631
deltaYoung(15)= 0.00242
deltaYoung(16)= 0.04934
deltaYoung(17)= 0.04479
deltaYoung(18)= 0.03030
deltaYoung(19)= 0.00242
deltaYoung(20)= 0.01734
deltaYoung(21)= 0.02919
deltaYoung(22)= -0.00328
deltaYoung(23)= 0.00086
deltaYoung(24)= -0.03654
deltaYoung(25)= -0.03631

51
deltaYoung(26)= -0.01665
deltaYoung(27)= 0.00783
deltaYoung(28)= -0.01169
deltaYoung(29)= -0.01332
!small proportional mistuning density variations
*dim,deltaDens,array,ns
deltaDens(1) = 0.00704
deltaDens(2) = 0.00207
deltaDens(3) = 0.00670
deltaDens(4) = -0.00502
deltaDens(5) = 0.00969
deltaDens(6) = -0.00323
deltaDens(7) = -0.00078
deltaDens(8) = -0.00688
deltaDens(9) = 0.00242
deltaDens(10)= -0.00747
deltaDens(11)= -0.00631
deltaDens(12)= -0.00570
deltaDens(13)= -0.00631
deltaDens(14)= -0.00631
deltaDens(15)= 0.00242
deltaDens(16)= 0.00934
deltaDens(17)= 0.00479
deltaDens(18)= 0.00030
deltaDens(19)= 0.00242
deltaDens(20)= 0.00734
deltaDens(21)= 0.00919
deltaDens(22)= -0.00328
deltaDens(23)= 0.00086
deltaDens(24)= -0.00654
deltaDens(25)= -0.00631
deltaDens(26)= -0.00665
deltaDens(27)= 0.00783
deltaDens(28)= -0.00169
deltaDens(29)= -0.00332
! traveling wave excitation vector
!============================================
freq1 = 26000.0

52 APDL script for geometry changing
freq2 = 43000.0
strDamping = 0.006
EO = 5.0
nnodesF = 1
! how many nodes to force
*dim,Forcing,,nnodesF,3
*dim,ForcingNodeIDs,,nnodesF
ForcingNodeIDs(1)=1680
Forcing(1,1)=-51.2440
Forcing(1,2)=22.9220
Forcing(1,3)=-13.0584
!=============================================
/prep7
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
*get,bladeNodeStart,node,,num,min
*get,bladeNodeEnd,node,,num,max
allsel
*get,ntot,node,,num,max
*get,etot,elem,,num,max
! Get the sector constrained node numbers array
cmsel,S,%S_C%
*get,mxnd,node,,num,max ! Get the max node number
*dim,nds,,mxnd ! Make the node array
*dim,nmsk,,mxnd ! Make the node mask array
*vfill,nds(1),ramp,1,1 ! Fill nds first column with node numbers
*vget,nmsk(1),node,1,nsel ! Figure out what is selected: creates mask
*vmask,nmsk(1) ! Mask on selected nodes
*vscfun,num_nd,NUM,nmsk(1) ! Count the total number of selected nodes
*dim,constr,,num_nd ! Make the node - dof mapping array
53
*vmask,nmsk(1) ! Mask on selected nodes
*vfun,constr(1),COMP,nds(1) ! Selectively compresses data set. "True" values of nds
*get,numnd,PARM,constr,DIM,X
!Get the blade interface constrained node numbers array
cmsel,S,%BLD_B%
*get,mxnd,node,,num,max ! Get the max node number
*dim,nds,,mxnd ! Make the node array
*dim,nmsk,,mxnd ! Make the node mask array
*vfill,nds(1),ramp,1,1 ! Fill nds first column with node numbers
*vget,nmsk(1),node,1,nsel ! Figure out what is selected: creates mask
*vmask,nmsk(1) ! Mask on selected nodes
*vscfun,num_nd,NUM,nmsk(1) ! Count the total number of selected nodes
*dim,inconstr,,num_nd ! Make the node - dof mapping array
*vmask,nmsk(1) ! Mask on selected nodes
*vfun,inconstr(1),COMP,nds(1) ! Selectively compresses data set. "True" values of nds
*get,innumnd,PARM,inconstr,DIM,X
! Arrays definition for the first pattern
*dim,arraymodif1,array,70,4
*VREAD,arraymodif1(1,1),Nodemodif1,txt,,jik,4,70,,
(F8.0,E13.5,2E12.5)
*dim,InitialNodes1,array,70,3
*do,ii,1,70
*vget,InitialNodes1(ii,1),node,ArrayModif1(ii,1),loc,x
*vget,InitialNodes1(ii,2),node,ArrayModif1(ii,1),loc,y
*vget,InitialNodes1(ii,3),node,ArrayModif1(ii,1),loc,z
*enddo
! Arrays definition for the second pattern
*dim,arraymodif2,array,93,4
*VREAD,arraymodif2(1,1),Nodemodif2,txt,,jik,4,93,,
(F8.0,E13.5,2E12.5)

54 APDL script for geometry changing
*dim,InitialNodes2,array,93,3
*do,ii,1,93
*vget,InitialNodes2(ii,1),node,ArrayModif2(ii,1),loc,x
*vget,InitialNodes2(ii,2),node,ArrayModif2(ii,1),loc,y
*vget,InitialNodes2(ii,3),node,ArrayModif2(ii,1),loc,z
*enddo
*do,ii,1,ns
*if,ii,NE,ns,then
chst = chrval(ii+1)
*else
chst = chrval(1)
*endif
mfil = ’RogueBlade_%chst%’
*if,mist(ii),EQ,1,then
/assign,full,RogueBlade_%chst%,full
/assign,mode,RogueBlade_%chst%,mode
/prep7
csys,0
nsel,s,node,,1,ntot
*do,jj,1,70
NMODIF,ArrayModif1(jj,1),InitialNodes1(jj,1)+Coeff1*ArrayModif1(jj,2),
InitialNodes1(jj,2)+Coeff1*ArrayModif1(jj,3),
InitialNodes1(jj,3)+Coeff1*ArrayModif1(jj,4),0,0,0
*enddo
*finish
*msg,,
--- Done with modifyning current rogue blade -------------------
/go
/solu
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
antype,2

55
msave,0
modopt,LANB,5
eqslv,SPAR
mxpand,5, , ,0
lumpm,0
pstres,0
modopt,LANB,5,1000,50000, ,OFF
solve
*finish
/assign,FULL,,
*msg,,
--- Done with extracting mass and stiffness matrices
/go
/prep7
!impose constraints to the blade interface nodes
*do,ndnum,1,innumnd
d,inconstr(ndnum),all,0.0,,,,,,,
*enddo
!d,865,all,0,,896,1,,,,
*finish
/solu
antype,2
msave,0
modopt,LANB,nmode
eqslv,SPAR
mxpand,nmode, , ,0
lumpm,0
pstres,0
modopt,LANB,nmode,Fstart,Fend, ,OFF
/solu
solve
*finish
! delete constraints to the interface
/assign,MODE,,
/prep7
*do,ndnum,1,innumnd
ddele,inconstr(ndnum),all
*enddo
!ddele,865,all,896,1,
*finish

56 APDL script for geometry changing
*msg,,
--- Done with extracting modes
/go
*elseif,mist(ii),EQ,2,then
/assign,full,RogueBlade_%chst%,full
/assign,mode,RogueBlade_%chst%,mode
/prep7
csys,0
nsel,s,node,,1,ntot
*do,jj,1,93
NMODIF,ArrayModif2(jj,1),InitialNodes2(jj,1)+Coeff2*ArrayModif2(jj,2),
InitialNodes2(jj,2)+Coeff2*ArrayModif2(jj,3),InitialNodes2(jj,3)
+Coeff2*ArrayModif2(jj,4),0,0,0
*enddo
*finish
*msg,,
--- Done with modifyning current rogue blade -------------------
/go
/solu
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
antype,2
msave,0
modopt,LANB,5
eqslv,SPAR
mxpand,5, , ,0
lumpm,0
pstres,0
modopt,LANB,5,1000,50000, ,OFF
solve
*finish
/assign,FULL,,
*msg,,
--- Done with extracting mass and stiffness matrices
/go
/prep7
!impose constraints to the blade interface nodes
*do,ndnum,1,innumnd

57
d,inconstr(ndnum),all,0.0,,,,,,,
*enddo
!d,865,all,0,,896,1,,,,
*finish
/solu
antype,2
msave,0
modopt,LANB,nmode
eqslv,SPAR
mxpand,nmode, , ,0
lumpm,0
pstres,0
modopt,LANB,nmode,Fstart,Fend, ,OFF
/solu
solve
*finish
! delete constraints to the interface
/assign,MODE,,
/prep7
*do,ndnum,1,innumnd
ddele,inconstr(ndnum),all
*enddo
!ddele,865,all,896,1,
*finish
*msg,,
--- Done with extracting modes
/go
*elseif,mist(ii),EQ,3,then
/assign,full,RogueBlade_%chst%,full
/assign,mode,RogueBlade_%chst%,mode
/prep7
csys,0
nsel,s,node,,1,ntot
scale = rand(1,1.1)
first = 1!1.2*scale
second = 1!1.16*scale
third = 1!1.11*scale
fourth = 1!1.05*scale

58 APDL script for geometry changing
fifth = 1!1.0*scale
!first round
*finish
*msg,,
--- Done with modifyning current rogue blade -------------------
/go
/solu
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
antype,2
msave,0
modopt,LANB,5
eqslv,SPAR
mxpand,5, , ,0
lumpm,0
pstres,0
modopt,LANB,5,1000,50000, ,OFF
solve
*finish
/assign,FULL,,
*msg,,
--- Done with extracting mass and stiffness matrices
/go
/prep7
!impose constraints to the blade interface nodes
*do,ndnum,1,innumnd
d,inconstr(ndnum),all,0.0,,,,,,,
*enddo
!d,865,all,0,,896,1,,,,
*finish
/solu
antype,2
msave,0
modopt,LANB,nmode
eqslv,SPAR
mxpand,nmode, , ,0
lumpm,0
pstres,0
modopt,LANB,nmode,Fstart,Fend, ,OFF

59
/solu
solve
*finish
! delete constraints to the interface
/assign,MODE,,
/prep7
*do,ndnum,1,innumnd
ddele,inconstr(ndnum),all
*enddo
!ddele,865,all,896,1,
*finish
*msg,,
--- Done with extracting modes
/go
*endif
*if,ii,NE,1,AND,mist(ii),EQ,0,then
*if,mist(ii-1),EQ,1,then
/prep7
csys,0
nsel,s,node,,1,ntot
*do,jj,1,70
NMODIF,ArrayModif1(jj,1),InitialNodes1(jj,1),InitialNodes1(jj,2),
InitialNodes1(jj,3),0,0,0
*enddo
*finish
*msg,,
----- Done with returning to tuned blade -----
/go
*elseif,mist(ii-1),EQ,2,then
/prep7
csys,0
nsel,s,node,,1,ntot
*do,jj,1,93
NMODIF,ArrayModif2(jj,1),InitialNodes2(jj,1),InitialNodes2(jj,2),
InitialNodes2(jj,3),0,0,0
*enddo
*finish
*msg,,
----- Done with returning to tuned blade -----

60 APDL script for geometry changing
/go
*elseif,mist(ii-1),EQ,3,then
/prep7
csys,0
nsel,s,node,,1,ntot
*finish
*msg,,
----- Done with returning to tuned blade -----
/go
*endif
*endif
*if,ii,NE,ns,then
/prep7
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
! create current blade’s material properties for proportional small mistuning
mptemp,,,,,,,,
mptemp,1,0
uimp,ii+2,REFT,,,70
mpde,EX,ii+2
mpde,NUXY,ii+2
mpde,DENS,ii+2
mpde,ALPX,ii+2
mpdata,DENS,ii+2,,0.00074014*(1+deltaDens(ii+1))
mpdata,EX,ii+2,,29500000*(1+deltaYoung(ii+1))
mpdata,NUXY,ii+2,,0.305
mpdata,ALPX,ii+2,,5.16E-006
! modify current blade’s material properties for proportional small mistuning
emodif,ALL,MAT,ii+2
nsel,s,node,,1,ntot
esel,s,elem,,1,etot
csys,11
! generate nodes ns times incrementing nodes by ntot each time
! from node 1 to node ntot incrementing by 1 with node
! location increments in the active coordinate system DY=alpha
ngen,2,ntot*ii,1,ntot,1,,alpha*ii

61
egen,2,ntot*ii,1,etot,
! replicate constraints
*do,ndnum,1,numnd
d,constr(ndnum)+ntot*ii,all,0.0,,,,,,,
*enddo
! apply travelling wave forcing excitation
*do,ndnum,1,nnodesF
f,ForcingNodeIDs(ndnum)+ntot*ii,FX,(cos(alpha*(ii)*EO)*Forcing(ndnum,1)),(sin(alpha*(ii)*EO)*Forcing(ndnum,1))
f,ForcingNodeIDs(ndnum)+ntot*ii,FY,(cos(alpha*(ii)*EO)*Forcing(ndnum,2)),(sin(alpha*(ii)*EO)*Forcing(ndnum,2))
f,ForcingNodeIDs(ndnum)+ntot*ii,FZ,(cos(alpha*(ii)*EO)*Forcing(ndnum,3)),(sin(alpha*(ii)*EO)*Forcing(ndnum,3))
*enddo
! generate current blade component to calculate blade’s Eucleadean norm
nsel,s,node,,bladeNodeStart+ntot*ii,bladeNodeEnd+ntot*ii
cm,Blade_%chst%,node
! return back the material properties of the initial blade
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
emodif,ALL,MAT,1
*finish
*else
! first blade material modification
/prep7
mptemp,,,,,,,,
mptemp,1,0
uimp,2,REFT,,,70
mpde,EX,2
mpde,NUXY,2
mpde,DENS,2
mpde,ALPX,2
mpdata,DENS,2,,0.00074014*(1+deltaDens(1))
mpdata,EX,2,,29500000*(1+deltaYoung(1))
mpdata,NUXY,2,,0.305
mpdata,ALPX,2,,5.16E-006
cmsel,S,%BLD_B%
cmsel,A,%BLD_I%
esln,S,1
emodif,ALL,MAT,2
! apply travelling wave forcing excitation to the first blade

62 APDL script for geometry changing
*do,ndnum,1,nnodesF
f,ForcingNodeIDs(ndnum),FX,(cos(alpha*(0)*EO)*Forcing(ndnum,1)),(sin(alpha*(0)*EO)*Forcing(ndnum,1))
f,ForcingNodeIDs(ndnum),FY,(cos(alpha*(0)*EO)*Forcing(ndnum,2)),(sin(alpha*(0)*EO)*Forcing(ndnum,2))
f,ForcingNodeIDs(ndnum),FZ,(cos(alpha*(0)*EO)*Forcing(ndnum,3)),(sin(alpha*(0)*EO)*Forcing(ndnum,3))
*enddo
! generate current blade component to calculate blade’s Eucleadean norm
nsel,s,node,,bladeNodeStart,bladeNodeEnd
cm,Blade_%chst%,node
*finish
*endif
*enddo
/prep7
allsel csys,11 nrotat,all ! merge nodes
nummrg,node,1.0e-03,,,high
allsel csys,0 nrotat,all
*finish
!------------------------------------------------------------------------
! Clear parameters
mfil =
BLD_I =
BLD_B =
S_C =
Fstart =
Fend =
nmode =
constr =
alpha =
mist =
scale =
first =
second =
third =
fourth =
fifth =
numnd =
innumnd =
deltaDens =
deltaYoung =

63
EO =
nnodesF =
ForcingNodeIDs =
Forcing =





























