Embed Size (px)
Citation preview
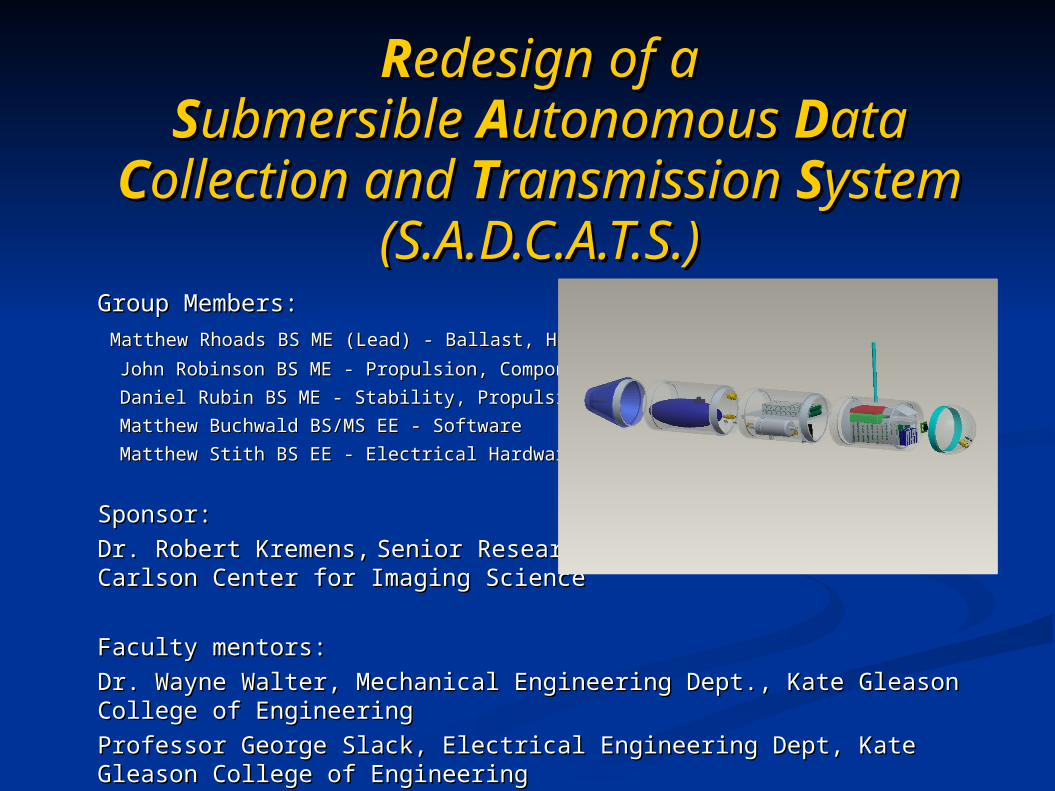
RRedesign of aedesign of aSSubmersibleubmersible A Autonomousutonomous D Dataata
CCollection andollection and T Transmissionransmission SSystemystem
(S.A.D.C.A.T.S.)(S.A.D.C.A.T.S.)Group Members: Group Members:
Matthew Rhoads BS ME (Lead) - Ballast, HullMatthew Rhoads BS ME (Lead) - Ballast, Hull
John Robinson BS ME - Propulsion, Component MountingJohn Robinson BS ME - Propulsion, Component Mounting
Daniel Rubin BS ME - Stability, Propulsion, Comp. MountingDaniel Rubin BS ME - Stability, Propulsion, Comp. Mounting
Matthew Buchwald BS/MS EE - SoftwareMatthew Buchwald BS/MS EE - Software
Matthew Stith BS EE - Electrical HardwareMatthew Stith BS EE - Electrical Hardware
Sponsor:Sponsor:
Dr. Robert Kremens,Dr. Robert Kremens, Senior Research Scientist Chester F. Carlson Senior Research Scientist Chester F. Carlson Center for Imaging ScienceCenter for Imaging Science
Faculty mentors:Faculty mentors:
Dr. Wayne Walter, Mechanical Engineering Dept., Kate Gleason College Dr. Wayne Walter, Mechanical Engineering Dept., Kate Gleason College of Engineeringof Engineering
Professor George Slack, Electrical Engineering Dept, Kate Gleason Professor George Slack, Electrical Engineering Dept, Kate Gleason College of EngineeringCollege of Engineering

Overview of PresentationOverview of Presentation
Project Description Mechanical Design
– Hull– Ballast System– Propulsion System– Component Mounting Rack– Mechanical Status and Outlook
Electrical Design– Electrical Hardware diagram– Software diagram– Electrical Status and Outlook
Overall Project Testing Schedule

Project DescriptionProject Description
An autonomous data-collecting submarine– A redesign of last year’s project
– Deployable on Lake Ontario
– Dives and resurfaces by pressurizing a ballast tank
– Collects pressure, temperature, and color data as a function of depth
– Propulsion systems allows sub to travel along surface

HullHull
Improvements in size and weight of the overall
vessel compared to first generation
Space-efficient packaging of components
Target external pressure of 4 atmospheres
Ease of access to internal components

Ballast SystemBallast System Increase in control during diving Integration into main body of vessel Capability to influence vessel attitude Removal of need for external medium Additional areas of weight reduction

Propulsion SystemPropulsion System
Two, two-blade propellers will be used to navigate through the water.
Instead of a rudder, the propellers will vary in speed to change direction.
Propulsion system is assembled separately before placement in its enclosure
Lip Seal provides dynamic seal for propeller shaft.
Thrust bearing provides axial stability.
A more powerful motor must be considered to achieve locomotion

Component Mounting SystemComponent Mounting System
• Allows electrical components to be mounted and accessible from the front end cap
• Provides easy removal of components• Locates batteries in lower region of
hull, aiding vessel stability
Mechanical StatusMechanical Status
Propulsion- Minimal fabrication left
- Enclosure seal test planned for Tuesday
- integrate to hull and test vessel locomotion Thursday
Component Mounting Rack- Fully assembled, integrated with electrical parts
Hull- Minimal fabrication left
Ballast- Fully Assembled
- Modification forthcoming to hold required ballast pressure

Electrical Hardware DiagramElectrical Hardware Diagram

Software FlowchartSoftware Flowchart

Electrical StatusElectrical Status
Software- Initialization, diving, rising, and data acquisition functional, Simulated Dive Test Complete on vessel
hardware
- GPS reading and interpretation code complete
- Propulsion and Navigation code complete, but untested; debug contingent on completion of propulsion system
- Data transmission subroutine is functional
- Data storage and retrieval not functional, currently in debug phase
Hardware- Battery system complete
- Power electronics board is complete, ready for dive test and propulsion system test
- Microcontroller is interfaced with power electronics board
- Pressure and Temperature sensors functional, color sensor still not interfaced
- GPS not interfaced with Microcontroller
- Radio transmission not functional, system is ready for modem to be supplied by sponsor

Overall ScheduleOverall Schedule
Pool tests planned for next week to do the following:- Demonstrate hull sealing
- Test proper ballast operation
- Execute successful dive code sequence
- Test locomotion on surface
- Demonstrate data collection and retrieval
- Establish color sensor operation
Dry tests for next week:- Show proper GPS operation and connection to microcontroller

























![Rhoads, David - Marcos Como Relato[1]](https://img.dokumen.tips/doc/110x75/557202b74979599169a3fa8f/rhoads-david-marcos-como-relato1.jpg)



