Embed Size (px)
Citation preview

Reconstrucción Iterativa
Margarita Núñez, PhD Escuela Universitaria de Tecnología Médica
Montevideo, Uruguay

Reconstructores

Algoritmo expectation-maximization (EM)
Se usa en estadística para encontrar estimaciones de máxima
verosimilitud de parámetros en modelos probabilísticos,
donde el modelo depende de variables latentes no
observables.
El algoritmo EM alterna entre la realización de un paso de
expectativa (E), que calcula una expectativa de la
probabilidad mediante la inclusión de variables latentes como
si hubieran sido observadas, y un paso de maximización (M),
que calcula las estimaciones de máxima probabilidad de los
parámetros mediante la maximización de la probabilidad
esperada encontrada en el paso E.
Los parámetros encontrados en el paso M son entonces
utilizados para comenzar el paso E siguiente, y así el proceso
se repite.

Problemas con la retroproyección filtrada
asume un modelo de proyección muy simple
no está incluida la atenuación
artefactos en raya (streak)
amplificación del ruido
Métodos de reconstrucción alternativos
Reconstrucción de Fourier
Inversión de la matriz
Método iterativo máxima probabilidad

Image courtesy of Bettinardi et al, Milan

¿Que significa iterativo?
• escoja un número del 1 al 20
número
estimado
comparado
con el número
actual
actualizar
estimación
persona
1
persona
2
<, >, =? COINCIDE

Re-proyección (forward) = proyección hacia adelante
detector
(proyección)
objeto reconstrucción
retroproyección
Estima las proyecciones de una reconstrucción (simula la adquisición)
re-proyección

a
b
c
detector
(proyección)
objeto
(reconstrucción)
Re-proyección

Comprendiendo la reconstrucción iterativa
Objetivo
Encontrar la distribución de actividad cuyas
proyecciones estimadas coincidan con las
medidas.
Modelando el sistema (matrix sistema)
¿Cuál es la probabilidad que un fotón emitido
desde una localización X sea detectado en
una localización del detector Y (PET: Y1, Y2).
- geometría y sensibilidad del detector
- atenuación
- scatter, randoms
- resolución, time-of-flight
detector
(medida)
objeto
m proyección
estimada
m
X
Y
X
Y1
Y2

Reconstrucción ML-EM
paciente proyecciones originales
proyecciones estimadas
estimación actual
original estimate
actualizar (x relación)
FP
BP SIN CAMBIO

Algoritmos ML-EM / OSEM
estimatecurrentFP
sprojectionmeasuredBPestimatecurrentestimatenew
_
___
ML-EM: cada actualización involucra BP y FP para todos los ángulos de proyección
OSEM: cada actualización sólo utiliza un subset de ángulos de proyección
iteraciones EM = iteraciones OS-EM x no de subsets
ML-EM
4 iterations
OS-EM
1 iteration
Update 1 Update 2 Update 3 Update 4

conventional EM reconstruction conventional EM reconstruction conventional EM reconstruction
Fin de la 1ra iteración
Fin de la 2da iteración
conventional EM reconstruction
-
-
-
Fin de n iteraciones
FINAL DE UNA
ÚNICA ITERACIÓN
MLEM versus OSEM (ordered subsets)
Ordered subsets (OS) EM reconstruction
El factor de aceleración es la relación (Nº total de proyecciones) / (Nº de
proyecciones en el subset); típicamente 64 / 4 = 16. En este caso 1 iteración
OSEM equevale a 16 iteraciones MLEM.

0
1000
2000
3000
4000
5000
6000
0 50 100 150
ch
i-sq
uare
d
iterations
em
os2
os4
0
50
100
150
200
250
0 50 100 150
mean
sq
uare
err
or
iterations
em
os2
os4

i
i
i
ij
iij
jnewj
y
ya
a ˆ
1
reproyección
retroproyección
estimatecurrentFP
sprojectionmeasuredBPestimatecurrentestimatenew
_
___
nueva estimación
estimación actual
matriz del sistema
Algoritmo ML-EM
estimatecurrentFP
sprojectionmeasuredBPestimatecurrentestimatenew
_
___

0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 1 0 0 0 0
0
0
0
0
1
0
0
0
0
0
Modelo simple del sistema
distancia
sinograma
ángulo

Atenuación & Scatter
• interacción primaria en tejidos, para fotones de energía relevantes en PET & SPECT,
es el scatter Compton
• atenuación resulta en pérdida de cuentas debido a la deflexión por scatter Compton
en el ‘trayecto detectable’
• scatter resulta en adición de cuentas no deseadas debido a la deflexión por scatter
Compton en el ‘trayecto detectable’

Scatter
Fracción de Scatter:
SPECT ~35%
PET 2D ~15%; 3D ~40%
PET versus SPECT
Atenuación
Factores de atenuación:
SPECT ~ x5 - x20
PET ~ x15 – x60

Modelo del sistema incorporando atenuación
0 0 0 0 0 0 0 0.3 0 0
0 0 0 0 0 0.2 0 0 0 0
0
0
0
0
0.1
0
0
0
0
0
• Probabilidad de detección reducida por la
atenuación en tejidos.

• medida:
- e.g. triple ventana de energía (TEW)
- incluye actividad fuera del FOV
- práctico pero ruidoso
Estimación de scatter (SPECT)
0
50
100
150
200
250
300
350
50 75 100 125 150 175
energy (keV)
rela
tive c
ou
nts
1de
2de
,p
• scatter modelado
- modelos analíticos
- modelos aproximación (ESSE, TDCS)
- modelos Monte Carlo
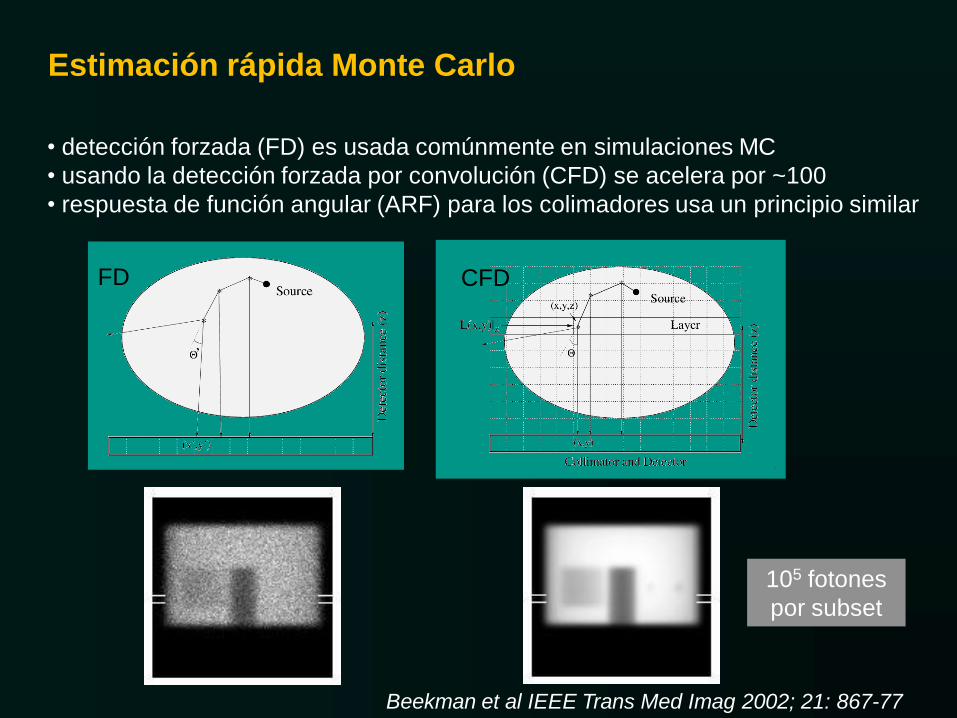
Estimación rápida Monte Carlo
• detección forzada (FD) es usada comúnmente en simulaciones MC
• usando la detección forzada por convolución (CFD) se acelera por ~100
• respuesta de función angular (ARF) para los colimadores usa un principio similar
FD CFD
Beekman et al IEEE Trans Med Imag 2002; 21: 867-77
105 fotones
por subset

Problemas con la pre-corrección
• ML-EM espera que los datos adquiridos sean Poisson
• el procesamiento de las proyecciones destruye la presunción Poisson
• también posiblemente introduce valores negativos
• en vez de eso, incorporar correcciones ‘dentro’ del modelo
Instead: add measured / estimated scatter in forward model
scatterestimateoldFP
sprojectionmeasuredBPestimateoldestimatenew
_
___
Historico: sustracción del scatter medido; aumenta el ruido
estimateoldFP
scattersprojectionmeasuredBPestimateoldestimatenew
_
___

Reconstrucción con estimación MC rápida del scatter
sin corrección corrección de atenuación corr de aten + scatter MC
Opciones comerciales
• MC option for Hermes (Nuclear Diagnostics)
• ESSE scatter model (Philips)
• TEW in projector (Siemens)
• TEW subtraction (GE)

FWHMtotal2 = FWHMdet
2 + FWHMrange2 + FWHM 180
2
positron range colinearity
detector
PET resolution SPECT resolution
FWHMsys2 = FWHMdet
2 + FWHMcoll2
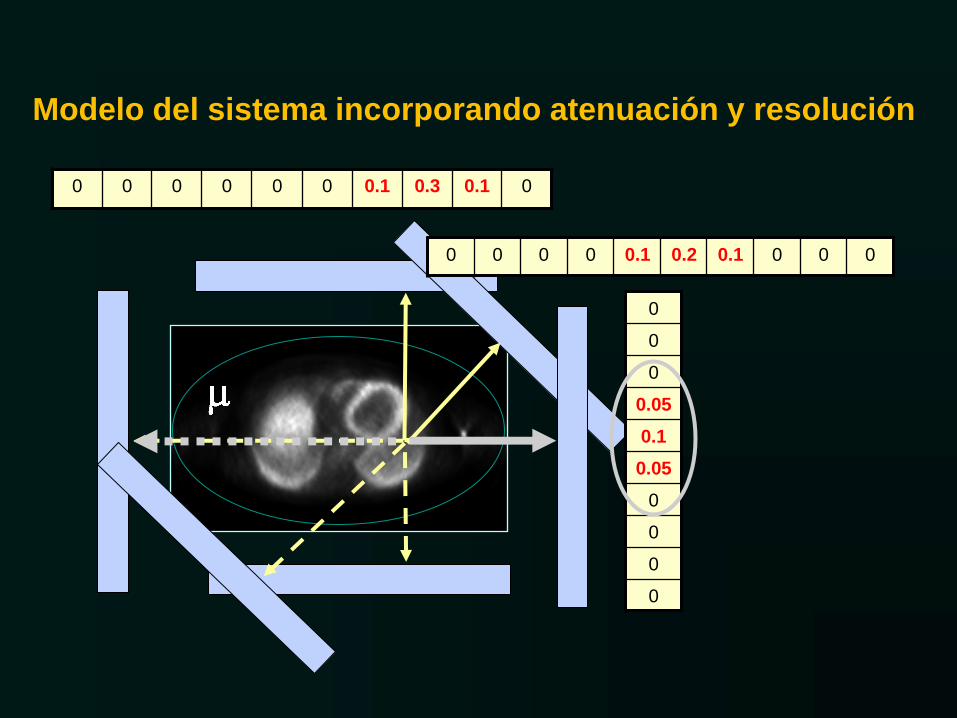
0 0 0 0 0 0 0.1 0.3 0.1 0
Modelo del sistema incorporando atenuación y resolución
0 0 0 0 0.1 0.2 0.1 0 0 0
0
0
0
0.05
0.1
0.05
0
0
0
0

Modelado de la resolución
noise
con
tras
t/re
cover
y
Modelo simple: • asume que no hay pérdida de resolución
Teniendo en cuenta la resolución: • asume exactamente que pasa con la resolución
• involucra cierta incertidumbre
Contraste v ruido:
• el ruido aumenta con el nº de iteraciones
• el contraste alcanza su mayor valor
Con el modelo de resolución: • se necesitan más iteraciones para alcanzar el
máx
• menos ruido para igual contraste
• mejor modelo; mejor calidad

Townsend, Phys Med Biol 2008; 53: R1-R39
Estudios Clínicos:
14subsets
2 iterations
3D-OP-OSEM 3D-OSEM with PSF

35-cm diameter phantom; 5 minute scan time
10, 13, 17, 22-mm hot spheres (6:1 contrast); 28, 37-mm cold spheres
noTOF
TOF
#iter = 1 2 5 10 20
TOF converge más rápidamente y logra mejor
contraste para un ruido determinado

Usos potenciales de la reconstrucción iterativa con CT
MLTR
• beneficios similares a los
estudios de emisión
• reducción del ruido
• reducción de artefactos
• geometria flexible
FBP
MLTR
MAP
Courtesy J Nuyts, KUL, Leuven
i
icC
i
ib CC )/ln(
PET/SPECT
CT

Reconstrucción Iterativa CT
Modelo del sistema más exacto • reducción de artefactos: beam hardening, scatter
‘Veo’ iterative recon

Geometría flexible
• truncado, pérdida de datos (photon starvation)
FBP
Iterative
MAP
Reconstrucción Iterativa CT

Resumen
Es estándar en la práctica clinical
Se necesita estar consciente de las limitaciones
- need to preserve Poisson statistics
Modelos de resolución mejoran el contraste y el ruido
- se requieren más iteraciones
Información de time-of-flight mejora la relación señal / ruido
- requiere menos iteraciones!
Aumentando el uso para CT
- menos dosis, menos artefactos

Muchas gracias

SPECT: filtros

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

Transformada de Fourier
Amplitud (A)
Frecuencia (f)
Amplitud (A)
Distancia (d) o tiempo (t)
Frecuencia espacial = nº de ciclos / distancia
x

Transformada de Fourier

-2
-1
0
1
2
0 0.2 0.4 0.6 0.8 1
am
plitu
d
Distancia (o tiempo)
Curva original
-4
-3
-2
-1
0
1
2
3
4
0 0.2 0.4
am
pli
tud
distancia (o tiempo)
Suma de las ondas seno individuales
0.6 0.8 1
+
+
FT
¿Qué es la transformada de Fourier?
Amplitud (A)
Frecuencia (f)
x
x
x
alta amplitud,
baja frecuencia
baja amplitud,
alta frecuencia

FT
FT-1
cuentas
distancia frecuencia
A
Transformada de Fourier: continuación

0
0.25
0.5
0.75
1
1.25
-1 -0.5
am
pli
tud
0 0.5 1 distancia
Fuente puntual perfecta (función delta)
0
0.2
0.4
0.6
0.8
1
0 0.2
am
pli
tud
0.4 0.6 0.8 1 Frecuencia (fracción de Nyquist)
Dominio de Fourier
FT
0
0.24
0.48
0.72
0.96
1.2
-1 -0.5 0 0.5 1
.......... LEAP
HR
am
pli
tud
distancia
Función de dispersión puntual
FT a
mp
litu
d
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 frecuencia (fracción de Nyquist)
Dominio de Fourier

FT
A
frecuencia distancia
cuentas
Transformada de Fourier de una imagen

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

1 2 1
2 4 2
1 2 1
FT A
frecuencia
43 51 42 46 38
48 57 40 44 46
40 42 47 35 47
47 44 41 44 39
0 0 0 0 0
0 47.6 44.6 42.7 0
0 45.0 43.3 41.9 0
0 0 0 0 0
Valor nuevo = [(4*57)+2*(48+51+40+42)+(43+42+40+47)]/16 = 47.6
filtro kernel
valores originales valores “filtrados”
Suavizado Espacial

1 2 1
2 4 2
1 2 1
FT A
frecuencia
43 51 42 46 38
48 57 40 44 46
40 42 47 35 47
47 44 41 44 39
0 0 0 0 0
0 47.6 44.6 42.7 0
0 45.0 43.3 41.9 0
0 0 0 0 0
Valor nuevo = [(4*57)+2*(48+51+40+42)+(43+42+40+47)]/16 = 47.6
filtro kernel
valores originales valores “filtrados”
Suavizado Espacial

FT FT-1 filtro
A
frecuencia
FT
Filtrado de Fourier imagen
filtro
Filtro 2d
1
0
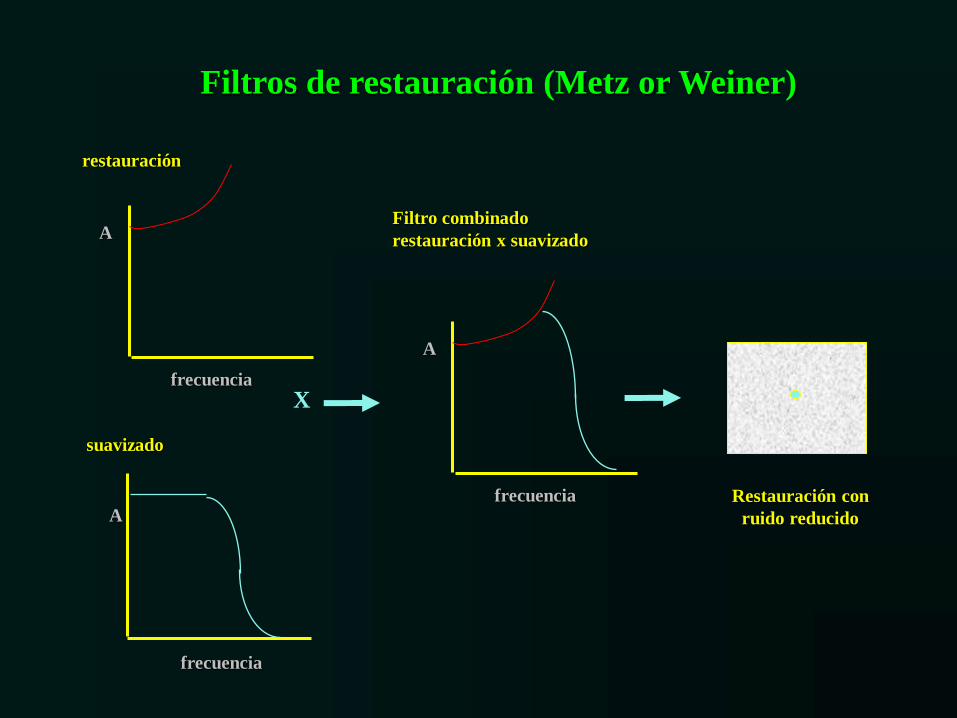
Filtros de restauración (Metz or Weiner)
A
frecuencia
A
frecuencia
A
frecuencia
X
restauración
suavizado
Filtro combinado
restauración x suavizado
Restauración con
ruido reducido
Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

* =
Reconstrucción Tomográfica

A
frecuencia
Cuentas distribuidas como 1/r
Retroproyección
FT
Retroproyección Filtrada
A
frecuencia
A
frecuencia
A = 1/f
1/f x f = 1
Rampa
(A = f)
filtro A = 1/f

Reconstrucción Tomográfica
* =
A
frecuencia
A
frecuencia
A
frecuencia
x =
FT FT-1 FT

original FBP: no filter
ramp: 16 angles ramp:128 angles

A
frecuencia
A
frecuencia
Filtro Rampa

A
frecuencia
A
frecuencia
A
frecuencia
x =
A
frecuencia
A
frecuencia
A
frecuencia
x =
Filtro Butterworth (SPECT)

Filtro rampa modificado A
frecuencia
A
frecuencia
A
frecuencia
x
rampa
Butterworth
rampa-Butterworth

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

0
0.2
0.4
0.6
0.8
1
0
am
pli
tud
0.2 0.4 0.6 0.8 1 frecuencia/fn
BW fc = 0.3 n = 2
BW fc = 0.3 n = 10
BW fc = 0.6 n = 10
Filtro Butterworth

Cambia la frecuencia de corte
(fracción de Nyquist)
Orden: 5
Cambia el orden
Fc: 0.56
0.46
0.66
0.86
2.5
5.0
10.0
Filtro Butterworth

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

A
frecuencia
+
Rampa Pre-reconstrucción (2d)
Filtrado 3D

A
frecuencia
+
Rampa modificado Post-reconstrucción (1d)
Filtrado 3D
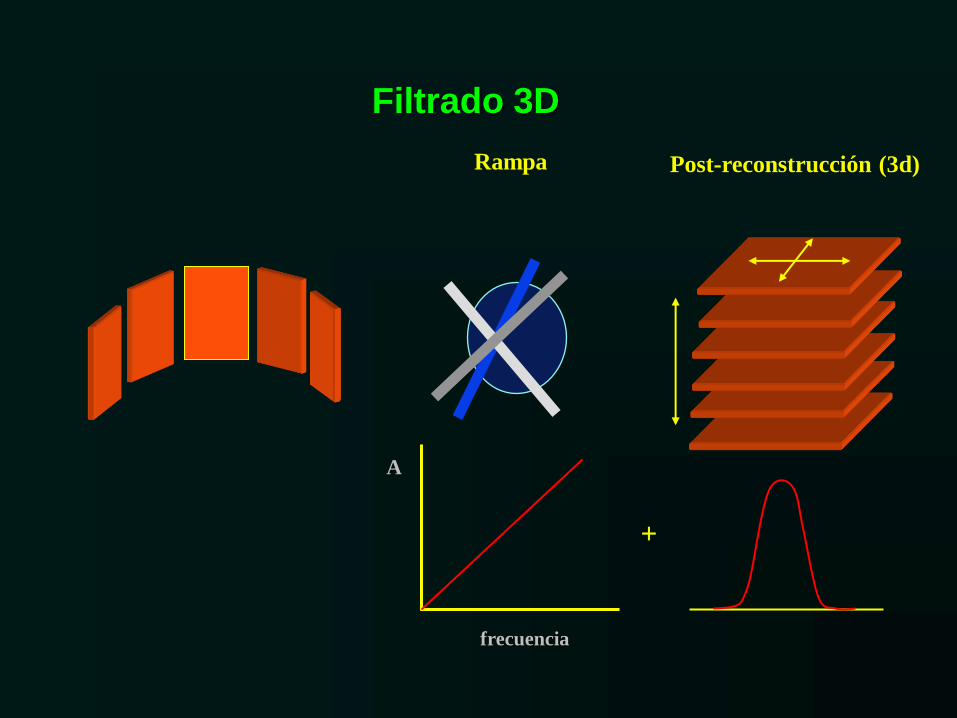
A
frecuencia
+
Rampa Post-reconstrucción (3d)
Filtrado 3D

Comprendiendo filtros
Filtros de Fourier (no-SPECT)
Suavizado y restauración
Filtros SPECT
Elección de los parámetros del filtro
Filtrado 3D
Comparación de filtros

Unidades de frecuencia
-4 40 cm
32 pixel
FOV
Frequency =
0.5 cycles/pixel 0.4 cycles/cm
16 cycles/FOV
1 * Nyquist f
Frequency =
0.25 cycles/pixel 0.2 cycles/cm 8 cycles/FOV
0.5 * Nyquist f
1 Pixel 1 cm
1 Pixel 1 cm
-3
-2
-1
0
1
2
3
4
32x32 Matrix 40 cm FOV
0 0.2 0.4 0.6 0.8 1

= frecuencia máxima medida utilizando un
tamaño de matriz específico
= 1 / (2 * tamaño del pixel)
frecuencia
A
Nf (32) Nf (64) Nf (128)
Tamaño de la matriz 32 64 128
Frecuencia máxima de la imagen determinada
por la resolución de la cámara
Frecuencia de Nyquist

0
0.2
0.4
0.6
0.8
1
1.2
0
am
plit
ud
0.2 0.4 0.6 0.8 1
frecuencia /fn
Filtro Butterworth (64*64)
B/W fc=0.4 n=10
Espectro imagen
0
0.2
0.4
0.6
0.8
1
1.2
0
am
plitu
d
0.2 0.4 0.6 0.8 1
frecuencia /fn
Filtro Butterworth (128*128)
Espectro imagen
B/W fc=0.2 n=10
B/W fc=0.4 n=10
Problemas con el uso de la frecuencia de Nyquist

64x64 128x128
Fc = 0.3
Fc = 0.5
Fc = 0.7
Fc = 0.5
Fc = 0.25
Fc = 0.25
(orden = 10)































