Embed Size (px)
Citation preview

Recent Developments in Spatially Distributed Control
Systems on the Paper Machine
Greg Stewart and James FanHoneywell, North Vancouver
Presented by Guy DumontUniversity of British Columbia

2 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Outline
• Industrial Paper Machine Operation
• Selected recent developments:- Automatic Tuning for Multiple Array Spatially Distributed
Processes
- Closed-Loop Identification of CD Controller Alignment

Industrial Paper Machine
Operation

4 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
The Paper Machine

5 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Headbox and Table
sheettravel
• Pulp stock is extruded on to a wire screen up to 11 metres wide and may travel faster than 100kph.
Initially, the pulp stock is composed of about 99.5% water and 0.5% fibres.

6 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Press Section
suctionpresses
• Newly-formed paper sheet is pressed and further de-watered.

7 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Dryer Section
finished reel
• The pressed sheet is then dried to moisture specifications
The paper machine picturedis 200 metres long and the paper sheet travels over 400 metres.
8 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
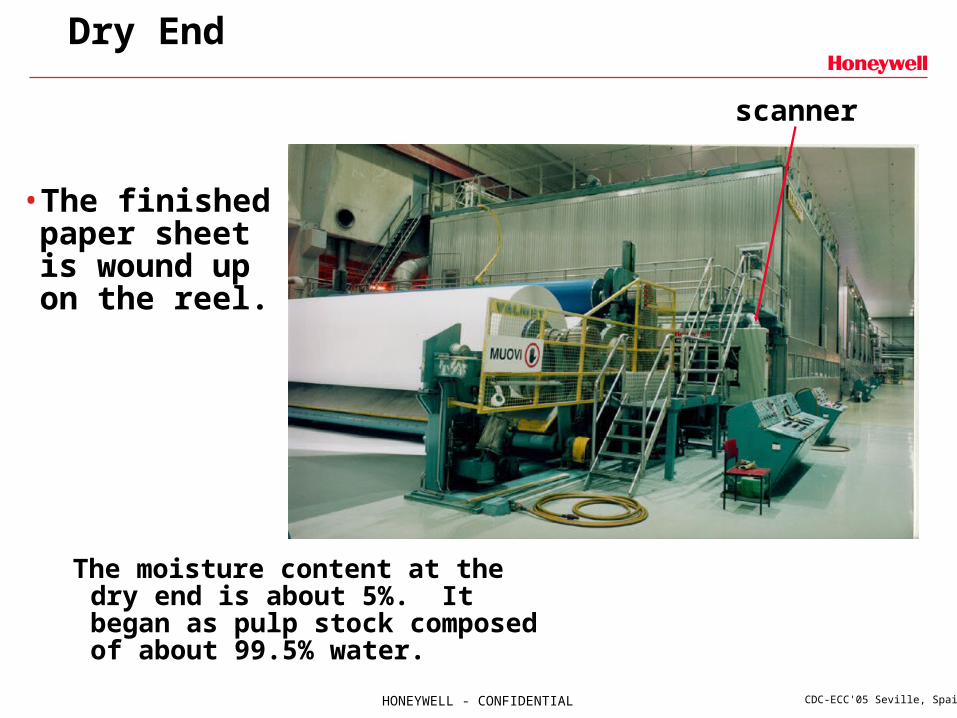
Dry End
scanner
• The finished paper sheet is wound up on the reel.
The moisture content at the dry end is about 5%. It began as pulp stock composed of about 99.5% water.

9 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Control Objectives
• Properties of interest:- weight
- moisture content
- caliper (thickness of sheet)
- coating & misc.
• Regulation problem: to maintain paper properties as close to targets as possible.
• Variance is a measure of the product quality.

10 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Paper Machine Process
Measurement gauges
MDCD
weight moisture caliper

11 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Cross-Directional Profile Control
• control objective: flat profiles in the cross-direction (CD)
• a distributed array of actuators is used to access the cross-direction
CD
MD

12 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Scanning Sensor
• Paper properties are measured by a sensor traversing the full sheet width.

13 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Cross-Directional Control
Measured profile response, y(t)
Actuator setpoint array, u(t)
CD
MD
Sensor measurements

14 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Profile Control Loop
LAN connection
LAN connection
INPUT SIGNAL, u(t)
OUTPUT SIGNAL, y(t)
CONTROLLER, K(z)
PROCESS, G(z)
TARGET, r(t)
15 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Supercalendering process
• Supercalendering is often an off-machine process used in the production of high quality printing papers
• The supercalendering objectives are to enhance paper surface properties such as gloss, caliper and smoothness
• Typical end products are magazine paper, high end newsprint and label paper

16 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Supercalenders
Off Machine Supercalender
• Gloss, caliper and smoothness are all affected by:- The lineal nip load
- The sheet temperature
- The sheet moisture content
• With the induction heating actuators we can change the sheet temperature and the local nipload
• With the steam showers we can change the sheet temperature and the sheet moisture content

Automatic Tuning for Multiple Array Spatially Distributed Processes

18 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Automated Tuning Overview
• Control problem-Multi-array cross-directional process models
- Industrial model predictive controller configuration
• Objectives of automated tuning• Two-dimensional frequency domain• Tuning procedure• Industrial software and examples• Conclusions

19 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Multiple-array CD process models
• Multiple-array process model:
ly.respective arraysactuator and
arrayst measuremen theof numbers the and
,, ,1,, ,1 with , ,, where
)()(
),()()(
)(
)(
)(
)(
)()(
)()(
)(
)(
)(
11
11
1
1111
uy
uyn
jm
ii
ijijij
NNNNN
N
N
NN
NjNiCuCdy
zhBzG
zDzUzG
zd
zd
zu
zu
zGzG
zGzG
zy
zy
zY
j
yuuyy
u
y

20 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Trial and error,Closed-loop simulations
CD-MPC weights andclosed-loop prediction
LAN (local area
network)
LAN
Directconnection
LAN connected when needed
Sensor measurements Actuator setpoints CDProcesses
CD-MPCController
Real timeQP solver
Model identification
Industrial MPC Configuration
Efficient and robust tuning
Automated MV Tuning

21 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Objective function of CD MPC
22
nom
1
1
2
1
2
43
21
H
jQ
H
jQ
sp
jkUUjkU
jkUYjkYkVcp
)()(
)()(ˆ)(
• The objective function
is minimized subject to actuator constraints for optimal control solution
Aggressiveness penalty
Energy penaltyPicketing penalty
Measurement weightPrediction horizon Control horizon

22 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Objectives of automated tuning
• The tuning problem is to set the parameters of the MPC:- Prediction and control horizons (Hp, Hc)
- Optimization weights (Q1, Q2, Q3, Q4)
To provide good closed-loop performance with respect to model uncertainty (balance between performance and robustness)
• Software tool requirements:- Computationally efficient implementation required for use in
the field
- Easy to use by the expected users

23 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Automated Tuning Overview
• Control problem-Multi-array cross-directional process models
- Industrial model predictive controller configuration
• Objectives of automated tuning• Two-dimensional frequency domain• Tuning procedure• Industrial software and examples• Conclusions

24 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Circulant matrices and rectangular circulant matrices
246810
13579
102468
91357
810246
79135
681024
57913
468102
35791
ccccc
ccccc
ccccc
ccccc
ccccc
ccccc
ccccc
ccccc
ccccc
ccccc
R
1
2
3
4
5
4
3
2
1
0
510
~0000
0~
000
00~
00
000~
0
0000~
0000
0000
0000
0000
0000
b
b
b
b
b
b
b
b
b
b
FRF H
A 10-by-5 rectangular circulant matrices
12345
51234
45123
34512
23451
ccccc
ccccc
ccccc
ccccc
ccccc
C
1
2
2
1
0
5
~0000
0~000
0000
0000
0000
5
a
a
a
a
a
FCF H
A 5-by-5 circulant matrices

25 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Two-dimensional frequency
• Based on the novel rectangular circulant matrices (RCMs) theory for CD processes,
),(~0
),(~0
),(~0
00
00
00
0),(
0),(
0),(
)(
1
1
1
0
zg
zg
zg
zg
zg
zg
FzGF
ij
qij
qij
pij
ij
ij
Hnijm j
,),(~,),(,,),(~,),(,),())((
sfrequencie spatail theacross modelplant array -single theof aluesSingular v
110 zgzgzgzgzgzG kijkijijijijij

26 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Single-array plant model in the 2-D frequency domain
01
23
45
10-3
10-2
10-10
0.01
0.02
0.03
0.04
0.05
0.06
spatial Nyquist frequency dynamical Nyquist frequency
spatial frequency [cycles/metre]
dynamical frequency [cycles/second]
|g(
,ei2
)|

27 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Multiple-array plant model in the 2-D frequency domain
• The model can be considered as rectangular circulant matrix blocks; and its 2-D frequency representation is
000000
000000
),(
),(
),(~),(
),(
)(
1
1
0
zg
zg
zg
zg
zg
PFzGFPk
kTu
Huyy
)),,(~()),,((,)),,(~()),,(()),,(())((
sfrequencie spatail theacross modelplant array -multiple theof aluesSingular v
110 zgzgzgzgzgzG kk

28 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Closed-loop transfer function matrices
1)()()( zKzGIzTyd
• Performance defined by sensitivity function
Kr K(z)Ysp U(z) Y(z)
G(z)+
D(z)
_
++
1 )()()()( zKzGIzKzTud
• Robust Stability depended on control sensitivity function
• Derive the closed-loop transfer functions of the system with unconstrained MPC.

29 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Sensitivity function for single array systems
01
23
45
10-810
-610-410
-21000
0.20.40.60.8
11.21.4
1.61.8
spatial frequency [cycles/metre]
dynamical frequency [cycles/second]
|tyd
(,ei2
)|
the surface for |tyd
(,ei2)|=0.7071
1 2 3 4 5 6
x 10-3
0.5
1
1.5
2
2.5
3
3.5
4
4.5
|tyd
(,ei2)<0.7071
|tyd
(,ei2)|=0.7071
dynamical frequency [cycles/second]
sp
ati
al
fre
qu
en
cy
[
cy
cle
s/m
etr
e]
Two-dimensional frequency bandwidthcontour

30 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Control sensitivity function for single array systems

31 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
• For additive unstructured uncertainty
where is the representation of Tud(z) in the two -dimensional frequency domain.
Robust Stability (RS) Condition
))((
1),(~supmax1)()(
22
ii
judj
ud eetzzT
),(~ 2 jud et
)( 2je
K(z) G(z)+
+
(z)

32 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Automated Tuning Overview
• Control problem-Multi-array cross-directional process models
- Industrial model predictive controller configuration
• Objectives of automated tuning• Two-dimensional frequency domain• Tuning procedure• Industrial software and examples• Conclusions

33 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Impact of MPC weights on Sensitivity Function1
• Interesting result:- MPC weight Q2 on u does not impact the spatial bandwidth- MPC weight Q4 does not impact the dynamical bandwidth
• Encourages a separable approach to the tuning problem:
1 “Two-dimensional frequency analysis for unconstrained model predictive control of cross-directional processes”, Automatica, vol 40, no. 11, p. 1891-1903, 2004.
1 2 3 4 5 6 x 10
0.5
1
1.5
2
2.5
3
3.5
4
4.5
|tyd(,ei2
)<0.7071
dynamical frequency [cycles/second]
spat
ial f
req
uen
cy
[
cycl
es/
met
re]
-3
Q4
Q2
01
23
45
10-810
-610-410
-21000
0.20.40.60.8
11.21.4
1.61.8
spatial frequency [cycles/metre]
dynamical frequency [cycles/second]
|tyd
(,ei2
)|
the surface for |tyd
(,ei2)|=0.7071
34 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
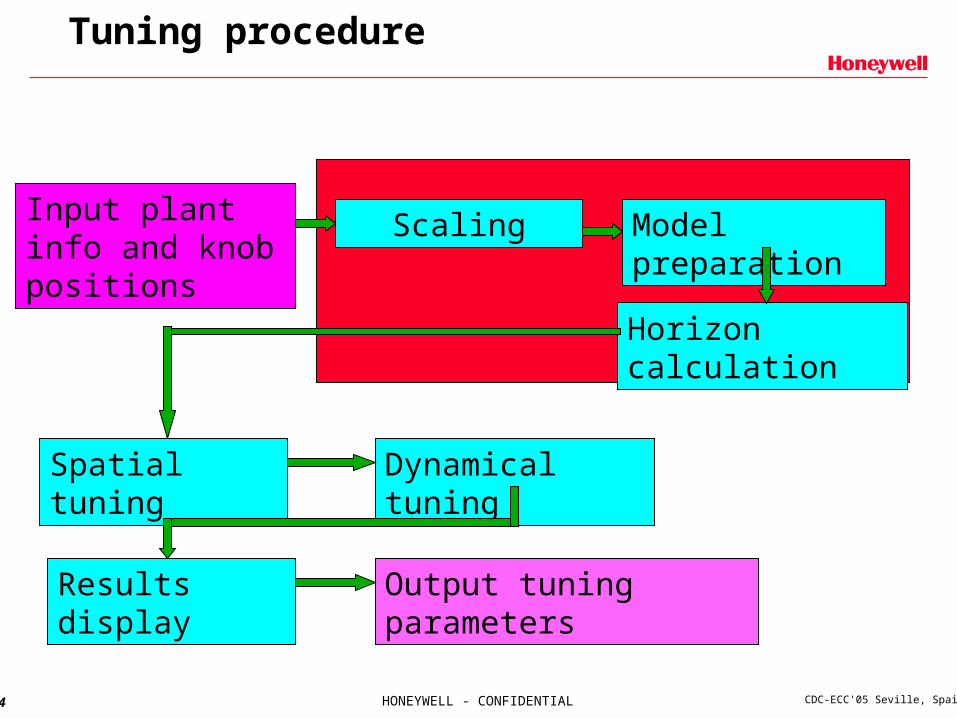
Tuning procedure
Scaling Model preparationInput plant info and knob positions
Horizon calculation
Spatial tuning Dynamical tuning
Results display Output tuning parameters

35 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Automated Tuning Overview
• Control problem-Multi-array cross-directional process models
- Industrial model predictive controller configuration
• Objectives of automated tuning• Two-dimensional frequency domain• Tuning procedure• Industrial software and examples• Conclusions

36 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Spatial tuning knobs in the tool

37 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Tune the controller using spatial gain functions

38 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Dynamical tuning knobs in the tool

39 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example 1: linerboard paper machine (1)
Four CD actuator arrays:
u1 = Secondary slice lip;
u2 = Primary slice lip;
u3 = Steambox;
u4 = Rewet shower;
Two controlled sheet properties:
y1 = Dry weight;
y2 = Moisture;
Overall model G(z) is a 984-by-220 transfer matrix.
Performance comparison between traditional decentralized control and auto-tuned MPC.

40 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example 1: linerboard paper machine (2)

41 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example 2: Supercalendars (1)
Four CD actuator arrays:
u1 = top steambox;
u2 = top induction heating;
u3 = bottom steambox;
u4 = bottom induction
heating;
Three controlled sheet properties:
y1 = caliper;
y2 = top gloss;
y3 = bottom gloss;
Overall model G(z) is a 2880-by-190 transfer matrix.
Performance comparison between traditional decentralized control, manually tuned MPC, and auto-tuned MPC.

42 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example 2: Supercalendars(2)

43 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example 2: Performance Comparison
Before control(2sigma)
Traditional control(2sigma)
ManualTuning(2sigma)
AutomatedTuning(2sigma)
Caliper 0.0882 0.0758(-14.06%)
0.0565(-35.94%)
0.0408(-53.74%)
TopsideGloss
2.8711 4.0326(+40.45%)
2.8137(-2%)
1.5450 (-46.19%)
WiresideGloss
3.5333 2.7613(-21.85%)
2.6060(-26.24%)
2.3109(-34.60%)

44 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Conclusions
• A technique was presented for solving an industrial controller tuning problem – multi-array cross-directional model predictive control.
• To be tractable the technique leverages spatially-invariant properties of the system.
• Implemented in an industrial software tool.
• Controller performance was demonstrated for two different processes.
Closed-Loop Identification of CD Controller Alignment

46 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Motivation
Actuator profile
MeasuredBump response
CD position [space]
• Uncertainty in alignment grows over time and can lead to degraded product and closed-loop unstable cross-directional control.
• Typically due to sheet wander and/or shrinkage.

47 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Motivation
• In many practical papermaking applications the alignment is sufficiently modeled by a simple function.
• We assume it to be linear throughout this presentation.(Although the proposed technique is not restricted to linear alignment.)
0 5 10 15 20 25 30 35 40 450
100
200
300
400
500
600
700
800
CROSS-DIRECTIONAL ACTUATOR NUMBER
PO
SIT
ION
OF
RE
SP
ON
SE
CE
NT
ER
xj = f(j)

48 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Current and Proposed Solutions

49 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Solutions for Identification of Alignment
Current Industrial Solutions:- Open-Loop Bumptest
- Closed-Loop Probing
Proposed Solution:
- Closed-loop bumptest

50 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Feedback diagram
• The standard closed-loop control diagram.- r = target (bias target)- u = actuator setpoint profile- y = scanner measurement profile
Gu y
dy
++++
du
K-
+r

51 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Open-Loop Bumptest
• Procedure- Open-loop insert perturbation at du
- Then record the response in y, to extract model G.
Gu y
dy
++++
du
K-
+r
• Whenever possible, closed-loop techniques are preferred in a quality-conscious industry.

52 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Closed-Loop Probing
• Procedure- Keep controller in closed-loop- Insert probing perturbation du on top of the actuator profile- Then record the response in y, to extract model G.
Gu y
dy
++++
du
K-
+r
• Technique relies on transient response of y. In practice a noisy process and scanning sensor make dynamics difficult to extract reliably.

53 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Proposed Solution: Closed-Loop Bumptest
• Procedure- Leave loop in closed-loop control- Insert perturbation on target dr as shown- Record the response in the actuator profile u.
Gu y
dy
++K+r
dr
+ +
• The control loop is exploited to extract alignment information. No need of addressing (exciting and modeling) dynamics to extract alignment information.

54 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Overview of Background Theory

55 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Spatially Invariant Systems
• The theory of spatially invariant systems allows the convolution to be converted to multiplication in the frequency domain- Allows the spatial
frequency response of the entire array to be written as the Fourier transform of the response to a single actuator1
1S.R. Duncan, "The Cross-Directional Control of Web Forming Processes", PhD thesis, University of London, 1989.

56 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Appearance of Alignment in Frequency Domain
)(xg
)()( xgxg p
)(g
)()( geg jp
Spatial domain Spatial Frequency domain
• A shift in x will appear as a linear term in the phase of its Fourier transform.

57 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Closed-loop spatial frequency response
)()( ),()( )()(1)(
)()(1)()(
rury kgk
kgkg
)()( ry
Gu yK
-+r
• At steady-state (temporal frequency =0) the closed-loop input and output can be written in spatial frequency:
• For those spatial frequencies where the control has integral action we find the steady-state expressions:
)()()( 1 rgu
58 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Practical Consequence
• Combining these results we see that the change in alignment is contained in the phase of the actuator array:
)()()()()( 11 rgergu jp
Practical consequence: We can identify changes in the alignment of the CD process by inserting perturbations into the setpoint to the CD controller.
Advantages:• Straightforward execution• CD control can remain in closed-loop – no need to work against the control action• Size of disruption in paper is more predictable than with actuator bumps

59 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Example

60 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Simulation Setup
• We introduce a combined sheet wander and shrinkage into the simulation by artificially moving the low side and high side sheet edges by 20mm and 60mm respectively.
20mm 60mm

61 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Regular steady-state closed-loop operation
Gu yK
-+r
50 100 150 200 250191
192
193
ME
AS
UR
EM
EN
T
CLOSED-LOOP STEADY-STATE PROFILES UNDER NORMAL OPERATION
0 5 10 15 20 25 30 35 40 45-20
0
20
AC
TU
AT
OR
50 100 150 200 250191
192
193
BIA
S T
AR
GE
T
CROSS-DIRECTION
• CD controller tuned ‘as usual’ with integral action at low spatial frequencies.

62 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Closed-loop response of profiles
• Bumps inserted into the bias target profile while CD control is in closed-loop.
50 100 150 200 250191
192
193
ME
AS
UR
EM
EN
T
CLOSED-LOOP STEADY-STATE PROFILES WITH BIAS TARGET BUMPS
0 5 10 15 20 25 30 35 40 45-20
0
20
AC
TU
AT
OR
50 100 150 200 250191
192
193
BIA
S T
AR
GE
T
CROSS-DIRECTION
Gu y
K+r
dr
+ +G
u yK+r
dr
+ +

63 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Response relative to baseline profiles
50 100 150 200 250-1
0
1
ME
AS
UR
EM
EN
T
DIFFERENCE BETWEEN BUMPED AND NORMAL CLOSED-LOOP PROFILES
0 5 10 15 20 25 30 35 40 45
-2
0
2
AC
TU
AT
OR
50 100 150 200 250-1
0
1
BIA
S T
AR
GE
T
CROSS-DIRECTION

64 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Profile partitioning
50 100 150 200 250-1
0
1
ME
AS
UR
EM
EN
T
DIFFERENCE BETWEEN BUMPED AND NORMAL CLOSED-LOOP PROFILES
0 5 10 15 20 25 30 35 40 45
-2
0
2A
CT
UA
TO
R
50 100 150 200 250-1
0
1
BIA
S T
AR
GE
T
CROSS-DIRECTION
DFT DFT
gain gain phasephase

65 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Frequency domain analysis of actuator profile
Low side phase has a slope of 29.5mm at zero frequency.
-0.02 -0.01 0 0.01 0.020.92
0.94
0.96
0.98
1
1.02
Ma
gnitu
de
Frequency [radians/eng unit]
LOW SIDE
-0.02 -0.01 0 0.01 0.02-0.5
0
0.5
Ph
ase
[rad
ian
s]
Frequency [radians/eng unit]
-0.02 -0.01 0 0.01 0.020.8
0.85
0.9
0.95
1
1.05
Ma
gnitu
de
Frequency [radians/eng unit]
HIGH SIDE
-0.02 -0.01 0 0.01 0.02-1
-0.5
0
0.5
1
Pha
se [
radi
ans]
Frequency [radians/eng unit]
High side phase has a slope of 50.9mm at zero frequency.

66 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Derivation of global alignment
• Here we make an assumption of linear alignment shift and thus need only two points to define a straight line.
• Confirm that the ends of the straight line correspond to the 20mm and 60mm alignment change.
0 5 10 15 20 25 30 35 40 4520
25
30
35
40
45
50
55
60
65
CROSS-DIRECTIONAL ACTUATOR NUMBER
ALI
GN
ME
NT
SH
IFT
[en
g un
its]
29.5mm
50.9mmxj = f(j)

67 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
Conclusions
• The proposed closed-loop bumptest uses a perturbation in the setpoint profile and identifies the response of the actuator array.
• Technique is sensitive to changes in alignment of the paper sheet – a practically important model uncertainty.
• Technique can be implemented with minor changes to existing installed base of CD control systems.
• Initial experiments have begun on industrial paper machines.
• While not necessary to date, more complex shrinkage models would simply require more than two bumps for identification.

68 HONEYWELL - CONFIDENTIAL CDC-ECC'05 Seville, Spain
References
CDC-ECC 2005 - TuB09, Process Control II• J. Fan and G.A. Dumont, “Structured uncertainty in paper machine cross-directional control”,
to appear in TuB09, Process Control II , Seville, Spain, 2005.• Borrelli, Keviczky, Stewart, “Decentralized Constrained Optimal Control Approach to
Distributed Paper Machine Control” TuB09, Process Control II , Seville, Spain, 2005
Other• J. Fan and G.E. Stewart, “Automatic tuning of large-scale multivariable model predictive
controllers for spatially-distributed processes”, US Patent (No.:11/260,809) filed 2005.• J. Fan, G.E. Stewart, G.A. Dumont, J. Backström, and P. He, “Approximate steady-state
performance prediction of large-scale constrained model predictive control systems”, IEEE Transactions on Control Systems Technology, vol 13, no. 6, p. 884-895, 2005.
• J. Fan, G.E. Stewart, and G.A. Dumont, “Two-dimensional frequency analysis for unconstrained model predictive control of cross-directional processes”, Automatica, vol 40, no. 11, p. 1891-1903, 2004.
• J. Fan, “Model Predictive Control for Multiple Cross-Directional Processes: Analysis, Tuning, and Implementation”, PhD thesis, The University of British Columbia, Vancouver, Canada, 2003.
• J. Fan and G.E. Stewart, “Fundamental spatial performance limitation analysis of multiple array paper machine cross-directional processes”, ACC 2005, p. 3643-3649 Portland, Oregon, 2005.
• J. Fan, G.E. Stewart, and G.A. Dumont, “Two-dimensional frequency response analysis and insights for weight selection of cross-directional model predictive control”, CDC’03, p. 3717-3723, Hawaii, USA, 2003.
• G.E. Stewart, “Reverse Bumptest for Closed-Loop Identification of CD Controller Alignment”, US Patent filed Aug. 22, 2005.














![[RTF]honeywell-haustechnik.de Analogregler R-ST215N für Mischkreis Honeywell Analogregler R-ST215N Fabrikat: Honeywell Typ:R-ST215N PCE Honeywell Stellmotor R-VRK10-3 24V/0-10V Honeywell](https://img.dokumen.tips/doc/110x75/5b0899ed7f8b9af0438c889c/rtfhoneywell-analogregler-r-st215n-fr-mischkreis-honeywell-analogregler-r-st215n.jpg)













![PORQUE HONEYWELL Patrick Bogaert]. 2 HONEYWELL - CONFIDENTIAL](https://img.dokumen.tips/doc/110x75/5665b4371a28abb57c900f84/porque-honeywell-patrick-bogaert-2-honeywell-confidential.jpg)
