Embed Size (px)
Citation preview
SLIMUniversity of British Columbia
Tristan van Leeuwen, University of British ColumbiaSasha Aravkin, Michael Friedlander & Felix Herrmann
Recent advances in seismic waveform inversion
ICME Comp. Geosciences Seminar, Stanford, 01-‐10-‐2012
SLIM
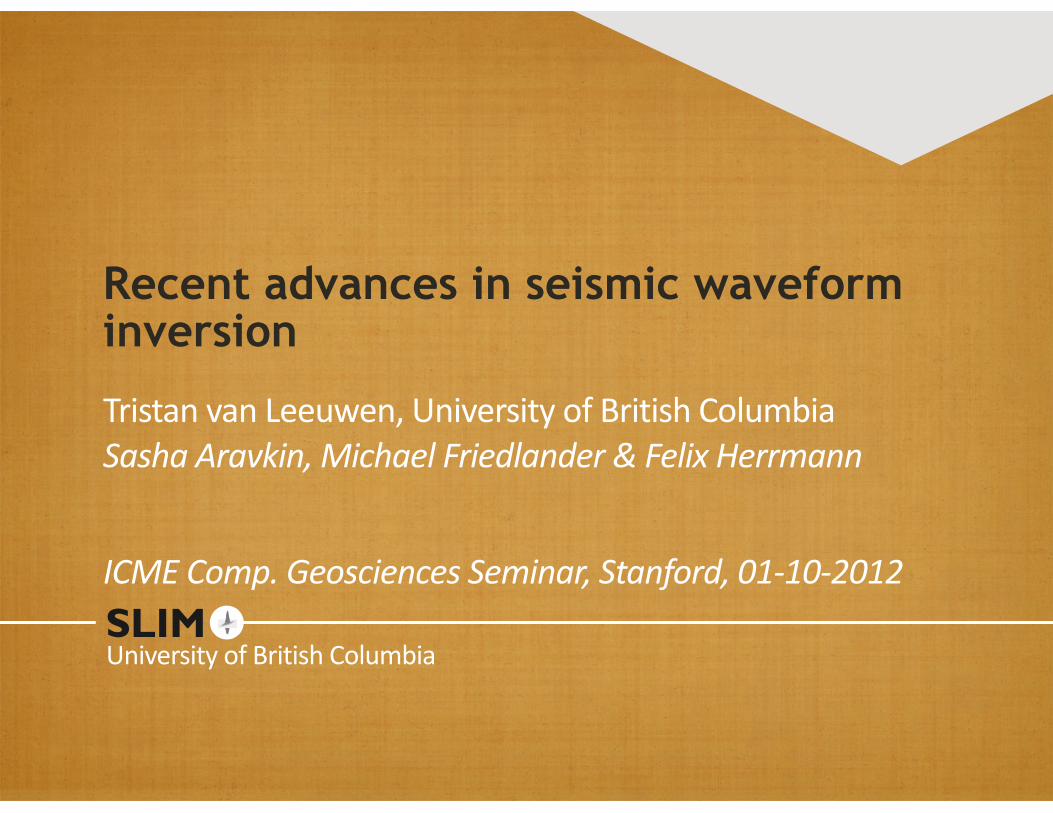
Seismic imaging

SLIM

SLIM
offset [m]
time
[s]
0 200 400 600
0
0.5
1
1.5
2
2.5
3
3.5
4
offset [m]
time
[s]
0 200 400 600
0
0.5
1
1.5
2
2.5
3
3.5
4
offset [m]
time
[s]
0 200 400 600
0
0.5
1
1.5
2
2.5
3
3.5
4
shot pos. [m]
time
[s]
0 200 400 600
0
0.5
1
1.5
2
2.5
3
3.5
4

SLIM
• Full waveform inversion• General formulation• Nuisance parameters• Fast optimization• Summary
Overview
SLIM
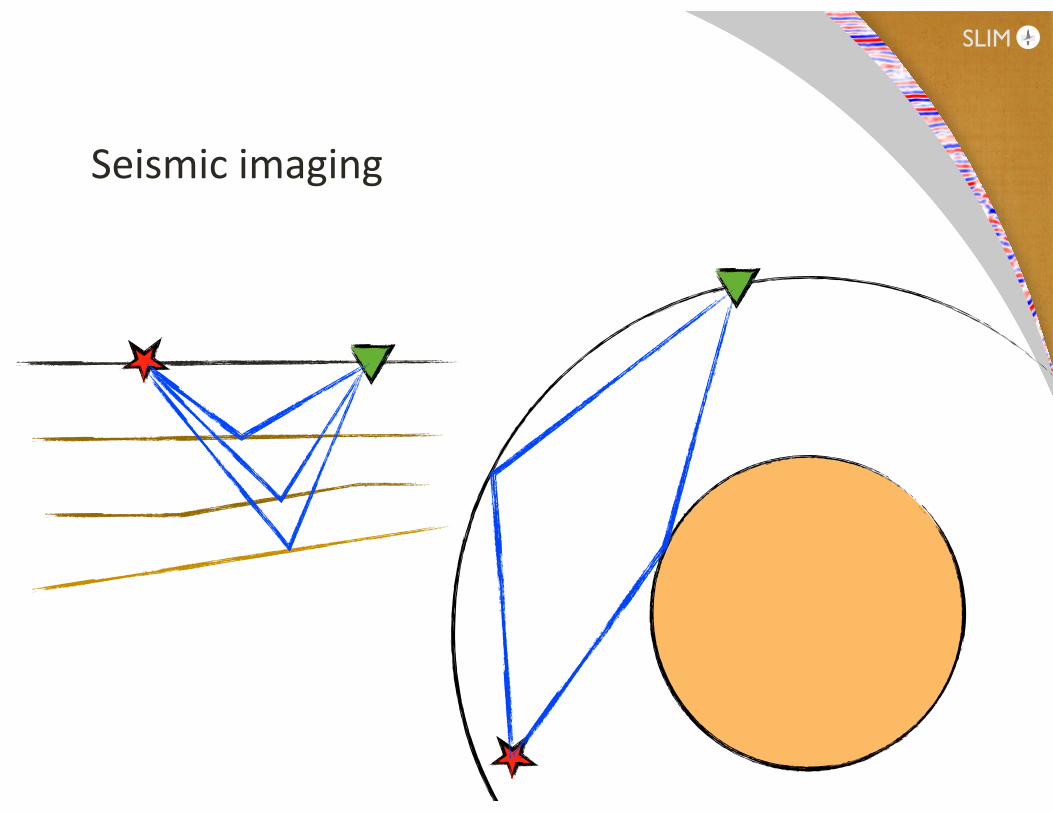
We model the data in the acoustic approximation
Full waveform inversion
1/soundspeed2m =
�!2m+r2
�ui = qi
di = Puiqi

SLIM
Realistic scale (3D): • unknowns• measurements• 3D Helmholtz equation is non-‐trivial to solve.
Full waveform inversion
O(1015)
O(109)

SLIM
non-‐linear least-‐squares problem:
adjoint-‐state method:
Full waveform inversion
@�
@mk=
MX
i=1
uHi
✓@A(m)
@mk
◆H
vi
A(m)ui = qi A(m)Hvi = PTi (di � Piui)
minm
�(m) =MX
i=1
||di � Piui||22

SLIM
Camembert example
Full waveform inversion
x [km]
z [k
m]
0 0.5 1
0
0.2
0.4
0.6
0.8
12.3
2.4
2.5
2.6
2.7
[Gauthier et al ’86]

SLIM
models explain ~95% of the data
Full waveform inversion
x [km]
z [k
m]
0 0.5 1
0
0.2
0.4
0.6
0.8
12.3
2.4
2.5
2.6
2.7
x [km]
z [k
m]
0 0.5 1
0
0.2
0.4
0.6
0.8
12.3
2.4
2.5
2.6
2.7
reflection transmission
SLIM
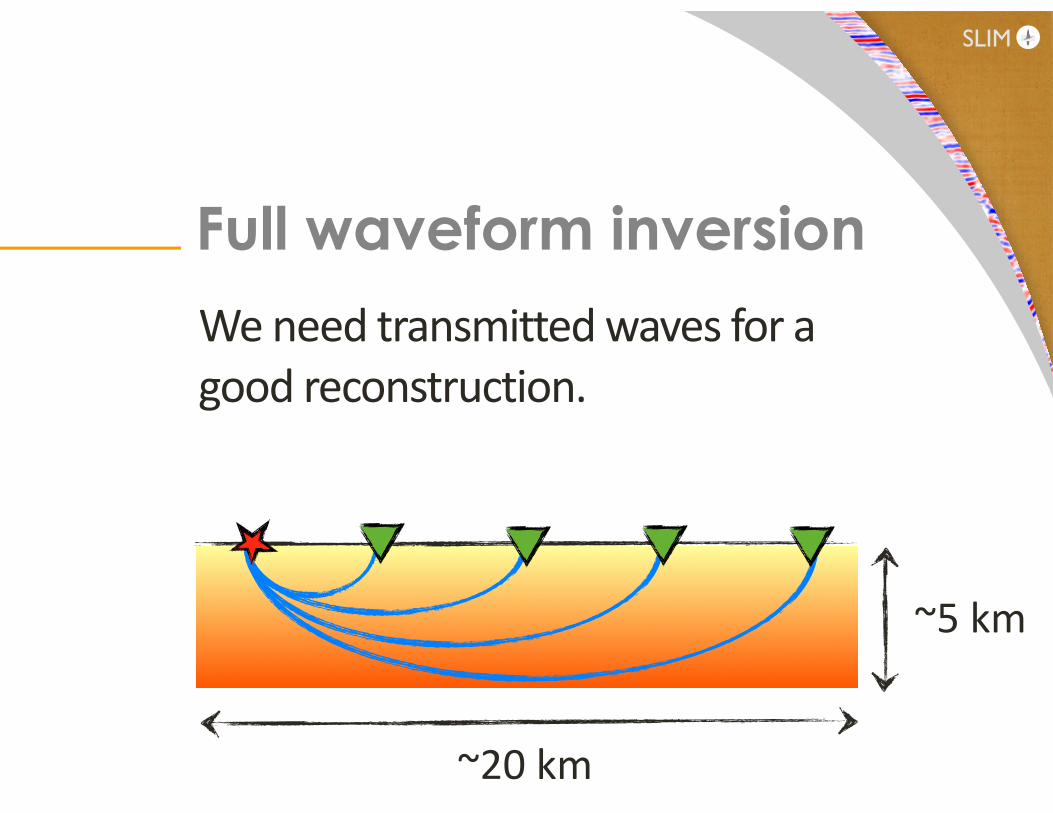
Full waveform inversion
We need transmitted waves for a good reconstruction.
~20 km
~5 km
SLIM
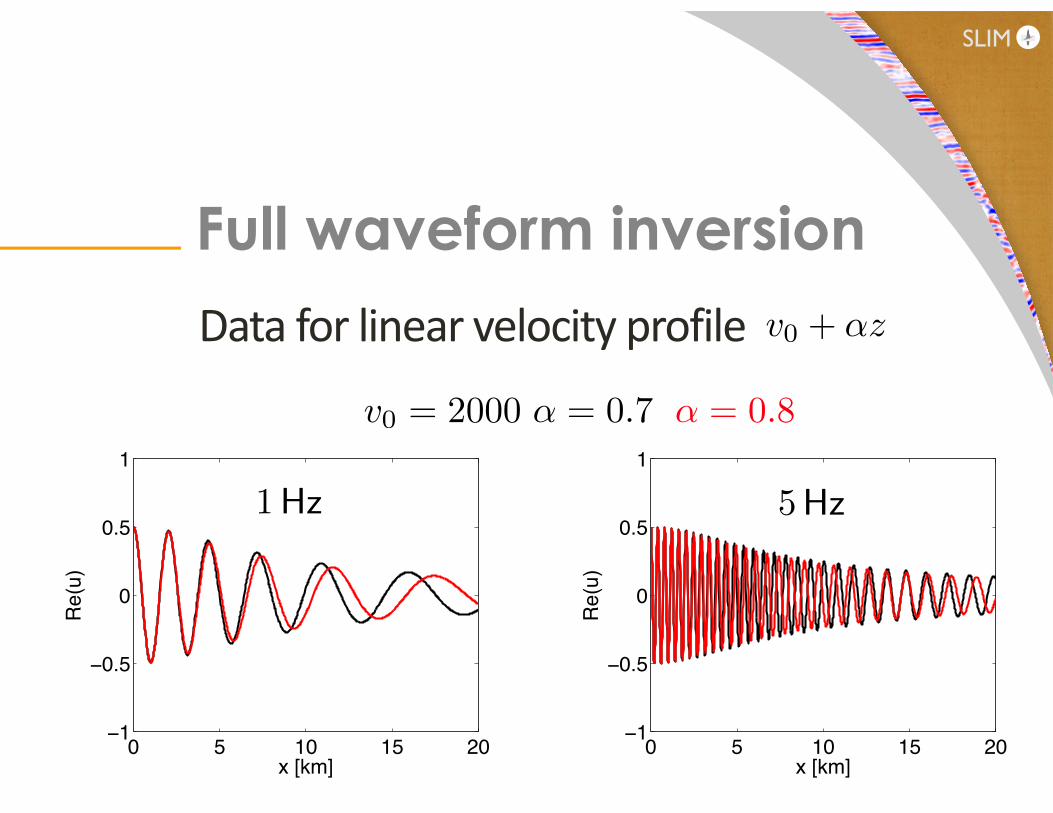
Data for linear velocity profile
Full waveform inversion
0 5 10 15 20−1
−0.5
0
0.5
1
x [km]
Re(
u)
0 5 10 15 20−1
−0.5
0
0.5
1
x [km]
Re(
u)
v0 + ↵z
↵ = 0.7 ↵ = 0.8v0 = 2000
1Hz 5Hz

SLIM
LS misfit as a function of
Full waveform inversion
v0 [m/s]
_ [1
/s]
0.6 0.8 1
1500
2000
2500v0 [m/s]
_ [1
/s]
0.6 0.8 1
1500
2000
2500
(v0,↵)
1Hz 5Hz
[Mulder et al ’08]
local minima
SLIM
These observations motivate continuation strategies• low -‐ high frequency• small -‐ large offsets• early -‐ late arrival times
Full waveform inversion
[Bunks ’95; Pra` ’98;Shin ’08,’09]

SLIM
is twice differentiable is the primary parameter, is a set of auxiliary parameters,typically
General formulation
m 2 Rn
✓ 2 Rk
�i : Rn ⇥ Rk ! R
k ⌧ n
minm,✓
�(m, ✓) =MX
i=1
�i(m, ✓)

SLIM
example 1:least-‐squares with source calibration
is a source-‐weight
General formulation
✓i
�i(m, ✓) = ||di � ✓iFi(m)||22

SLIM
example 2:Gaussian ML estimation
General formulation
P✓(m,d) =Y
i
(2⇡✓i)�N/2
exp
�� 1
2 ||di � Fi(m)||22/✓i�
�i(m, ✓) = N log(2⇡✓i) + ✓�1i ||di � Fi(m)||22
di = Fi(m) + ✏i, ✏i ⇠ N (0, ✓iI)

SLIM
example 3:Robust ML estimation
for Students T:
General formulation
di = Fi(m) + ✏i, ✏i ⇠ heavy-tailed distribution
�i(m, ✓) = ⇢✓(di � Fi(m))
⇢✓(r) = �N log
�(
✓+12 )
�(
✓2 )p⇡✓
!+
✓ + 1
2
NX
j=1
log(1 + r2j/✓)

SLIM
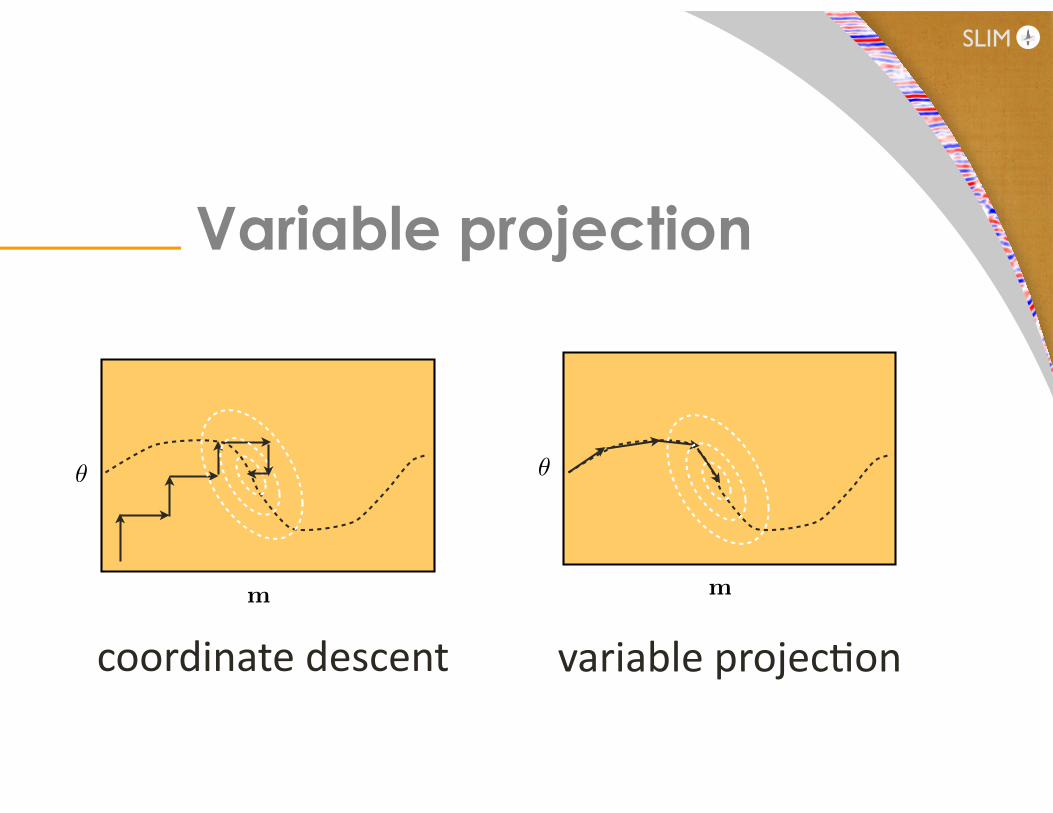
Consider cases where solving
for fixed is `easy’, and define
with
Variable projection
min✓
�(m, ✓)
m
✓̄(m) = argmin✓
�(m, ✓)
�̄(m) = min✓
�(m, ✓) = �(m, ✓̄(m))
SLIM
Thm. [Bell & Burke ’08]Let and be pos. def.The reduced objective is twice differentiable with
note that such that satisfies the first order optimality conditions of
Variable projection
r2✓�(m, ✓̄)r✓�(m, ✓̄) = 0
�̄(m) = �(m, ✓̄(m))
rm�̄(m) = rm�(m, ✓̄(m))
r2m�̄(m) = r2
m�(m, ✓̄(m))+rm,✓�(m, ✓̄(m))rm✓̄(m)
r�̄(m̄) = 0(m̄, ✓̄)
�
SLIM
Variable projection
m
✓
m
✓
coordinate descent variable projeccon

SLIM
• Faster convergence for [Golub&Peyrera ’73, Kaufman ’74, Osborne ’07]
• Extended least-‐squares [Bell & Burke ’96]
• Extension to general class, easy design of GN or QN methods [Aravkin & TVL ’12]
Variable projection||A(m)✓ � d||22

SLIM
• Source calibration• LS variance estimation• Robust T data-‐fitting
Applications

SLIM
Source estimation
x [km]
z [k
m]
0 5 10 15
0
1
22
3
4
5 10 15 200
20
40
60
80
100
frequency [1/s]
ampl
itude
x [km]
z [k
m]
0 5 10 15
0
1
22
3
4
source-‐weight
true model
recovered model
[TVL ’12]

SLIM
add noise with different variance
LS variance estimation
x [km]
z [k
m]
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
x [km]
z [k
m]
0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
2
0 10 20 30 40 500.8
0.85
0.9
0.95
1
iteration
rel. m
od
el e
rro
r
fixed variance
est. variance
||mk�
m⇤ || 2/||m
0�
m⇤ || 2
[Aravkin & TVL ’12]

SLIM
densities & penalties
Robust data-fitting
Gaussian, Laplace and Students T

SLIM
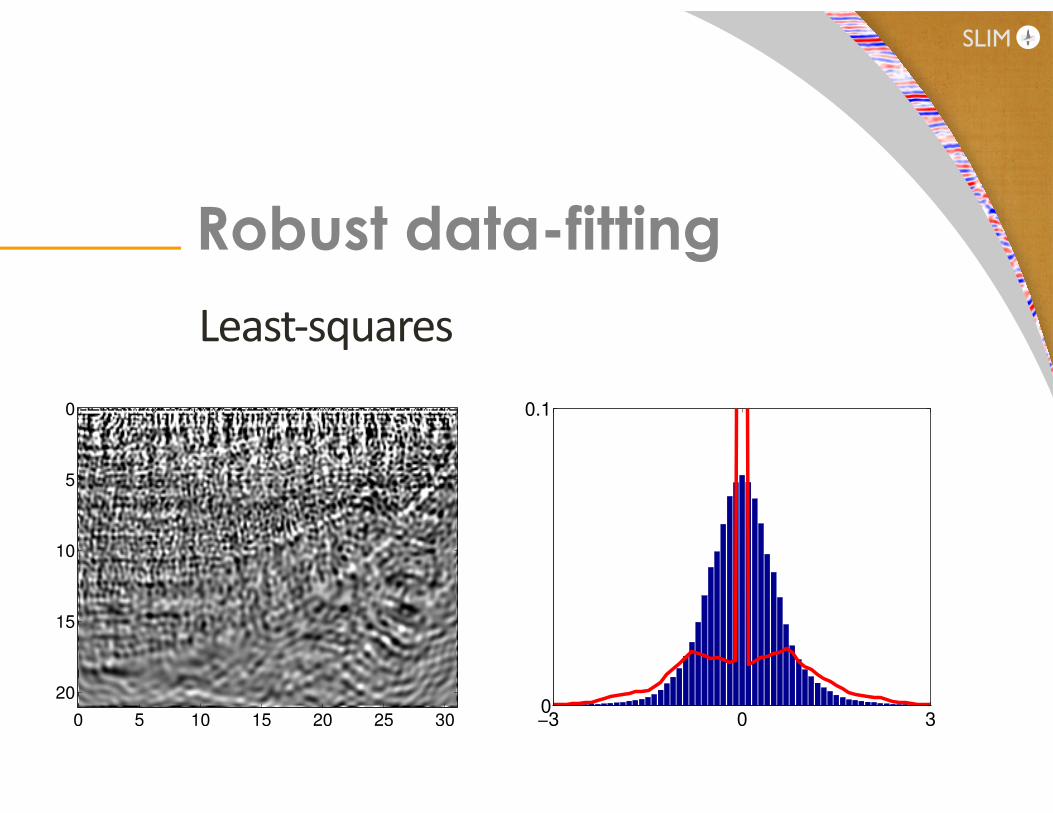
Recover from data with 50% outliers
Robust data-fitting
0 5 10 15 20 25 30
0
5
10
15
20
!3 0 30
0.1
di � F [mtrue]qi mtrue
[Friedlander ’12]
SLIM
Least-‐squares
Robust data-fitting
0 5 10 15 20 25 30
0
5
10
15
20
!3 0 30
0.1

SLIM
`Laplace’
Robust data-fitting
0 5 10 15 20 25 30
0
5
10
15
20
!3 0 30
0.1

SLIM
Students T
Robust data-fitting
0 5 10 15 20 25 30
0
5
10
15
20
!3 0 30
0.1

SLIM
Robust data-fitting
x [km]
z [k
m]
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1 !100
!50
0
50
100
150
200
x [km]
z [k
m]
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1 !100
!50
0
50
100
150
200
x [km]
z [k
m]
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1 !100
!50
0
50
100
150
200
true model fixed df.
Students t with varying degrees-‐of-‐freedom
fi`ed df.
SLIM
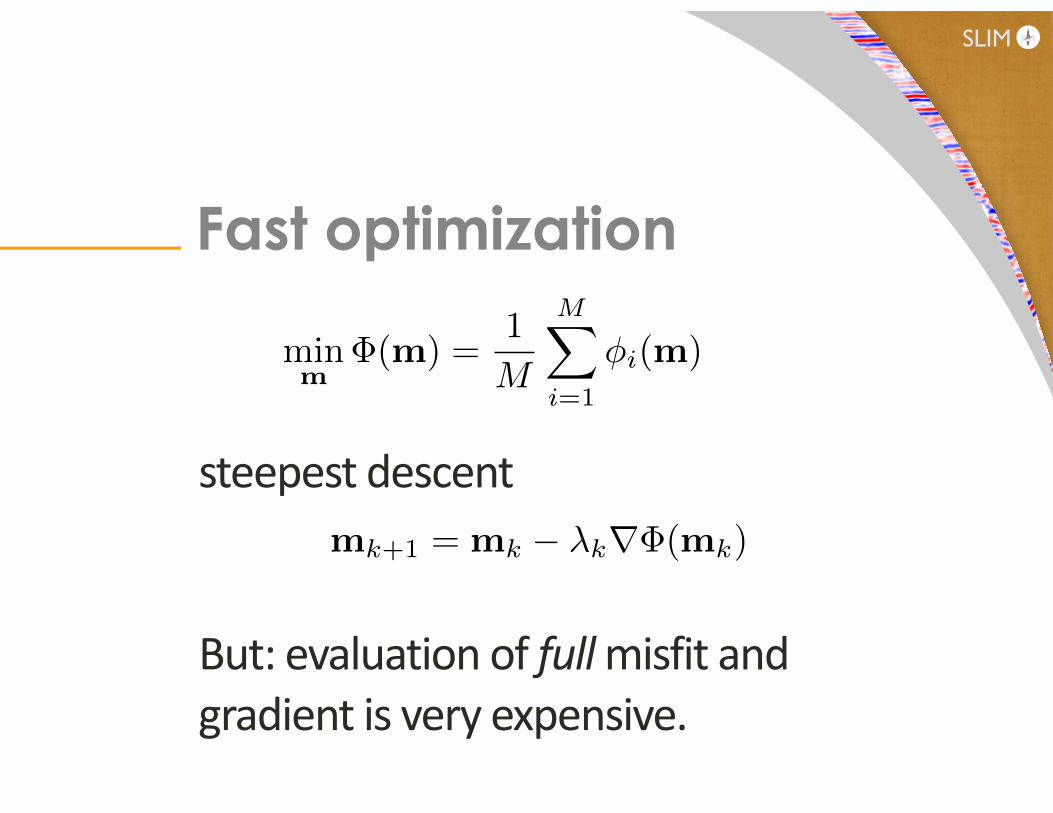
steepest descent
But: evaluation of full misfit and gradient is very expensive.
Fast optimization
minm
�(m) =1
M
MX
i=1
�i(m)
mk+1 = mk � �kr�(mk)
SLIM
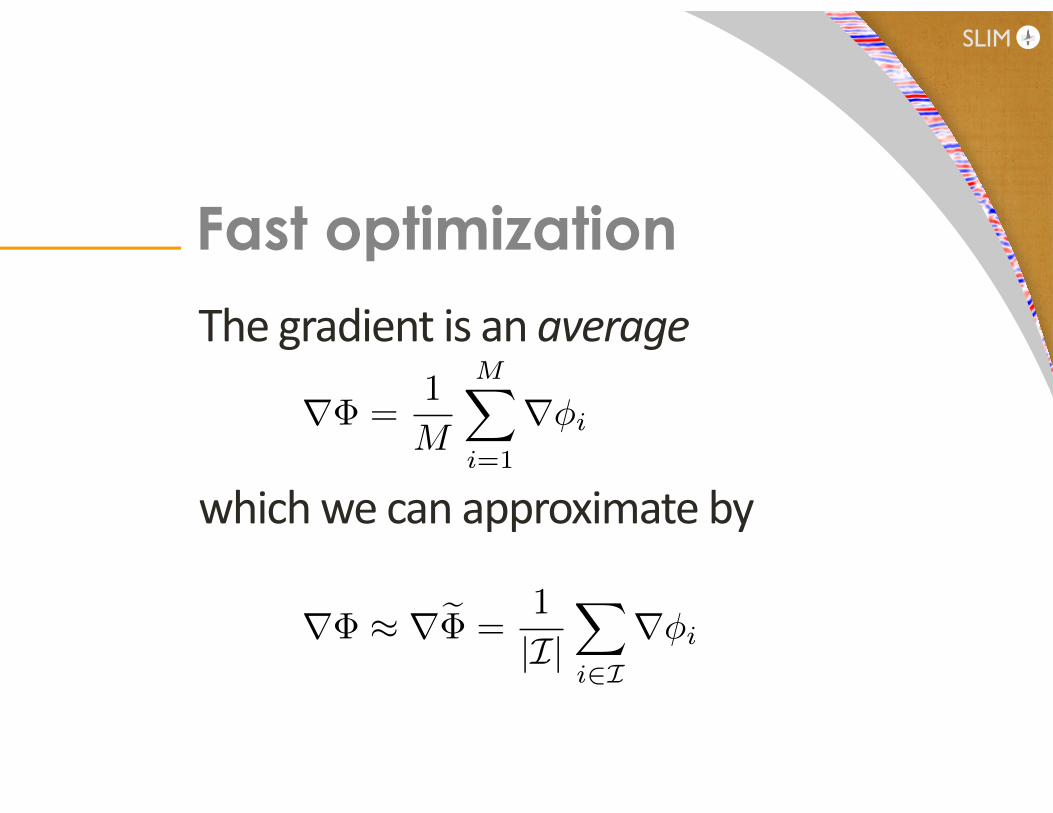
The gradient is an average
which we can approximate by
Fast optimization
r� ⇡ re� =1
|I|X
i2Ir�i
r� =1
M
MX
i=1
r�i

SLIM
Gradient descent with errors:
stochastic/incremental gradient require and have sublinear convergence rate
Optimization
re�k = r�k + ek
E(ek) = 0

SLIM
Instead, require that and Then
where Linear convergence if
Optimization
0 < c < 1
[Friedlander & Schmidt ’12]
||ek|| Bk
limk!1
Bk+1/Bk 1
Bk = O(�k)
�(mk)� �(m⇤) = ck(�(mk)� �(m0)) +O(max{Bk, c
k})

SLIM
Decrease the error by adding elements to the batch• in a pre-‐scribed order• random without replacement• random with replacement
Optimization
ek =M � |Ik|M |Ik|
X
i2Ik
r�i +1
M
X
i 62|I|
r�i

SLIM
Error in the gradient
Optimization
0 50 100 150
106
107
K
error
0 20 40 60 80 10010−4
10−3
10−2
10−1
100
batch size
erro
r
worst casew replacementw/o replacement
natural orderw replacementw/o replacement
error bound numerical result
SLIM
Sampling w/o replacement is best• fastest decrease of error• slowest increase of sample size for linear convergence
Optimization

SLIM
Optimization
x [km]
z [k
m]
0 2 4 6
0
1
2
x [km]z
[km
]0 2 4 6
0
1
2
100 200 300 400 500
0.7
0.75
0.8
0.85
0.9
# passes through data
rel.
mod
el e
rror
batchingfull
[van Leeuwen et al ’11]
10 x speedup
||mk�
m⇤ || 2/||m
0�
m⇤ || 2

SLIM
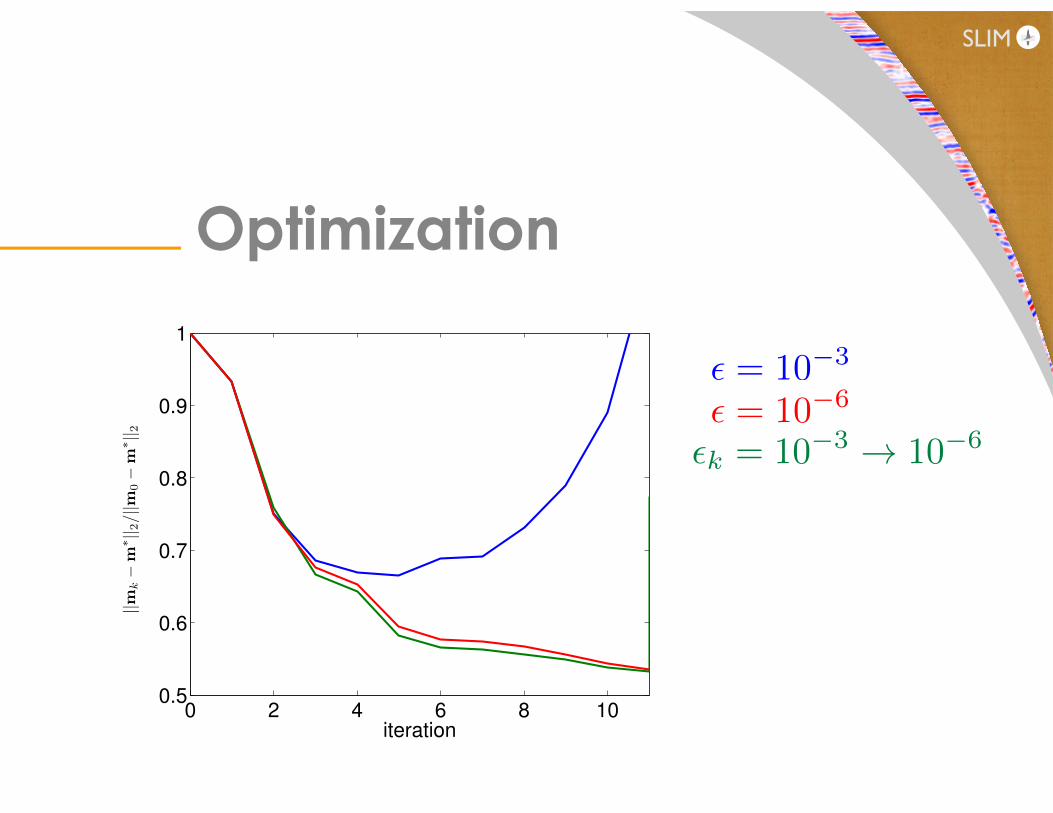
Decrease error by controlling accuracy of PDE-‐solves
Optimization
A(m)ui = qi
A(m)Hvi = PTi (di � Piui)

SLIM
Optimization
x [km]
z [k
m]
y = 0.5 km
0 0.5 1
0
0.5
1x [km]
y [k
m]
z = 0.5 km
0 0.5 1
0
0.5
1y [km]
z [k
m]
x = 0.5 km
0 0.5 1
0
0.5
1
x [km]
z [k
m]
y = 0.5 km
0 0.5 1
0
0.5
1x [km]
y [k
m]
z = 0.5 km
0 0.5 1
0
0.5
1y [km]
z [k
m]
x = 0.5 km
0 0.5 1
0
0.5
1x [km]
z [k
m]
y = 0.5 km
0 0.5 1
0
0.5
1x [km]
y [k
m]
z = 0.5 km
0 0.5 1
0
0.5
1y [km]
z [k
m]
x = 0.5 km
0 0.5 1
0
0.5
1
✏ = 10�3
✏ = 10�6 ✏k = 10�3 ! 10�6
SLIM
Optimization
0 2 4 6 8 100.5
0.6
0.7
0.8
0.9
1
iteration
rel. m
od
el e
rro
r
✏ = 10�3
✏ = 10�6
✏k = 10�3 ! 10�6
||mk�
m⇤ || 2/||m
0�
m⇤ || 2

SLIM
• Novel method for estimation of auxiliary parameters
• Improved recovery on very noisy data by using Students T
• Order of magnitude speedup by working on subsets of the data
Summary
This work was in part financially supported by the Natural Sciences and Engineering Research Council of Canada Discovery Grant (22R81254) and the Collaborative Research and Development Grant DNOISE II (375142-‐08). This research was carried out as part of the SINBAD II project with support from the following organizations: BG Group, BGP, BP, Chevron, ConocoPhillips, Petrobras, PGS, Total SA, and WesternGeco.
Acknowledgements
Thank you!

Further readingA.Y. Aravkin and T. van Leeuwen -‐ Escmacng nuisance parameters in inverse problems. Inverse Problems (accepted), 2012.
A. Aravkin, M.P. Friedlander, F.J. Herrmann and T. van Leeuwen -‐ Robust inversion, dimensionality reduccon and randomized sampling. Mathemaccal Programming, 2012.
T. van Leeuwen and F.J. Herrmann -‐ Fast waveform inversion without source encoding. Geophysical Prospeccng, 2012
B.M. Bell and J.V. Burke. Algorithmic differen9a9on of implicit func9ons and op9mal values.Advances in Automa9c Differen9a9on, 2008.B.M. Bell, J.V. Burke, and A. Schumitzky. A rela9ve weigh9ng method for es9ma9ng parameters and variances in mul9ple data sets. Comp. Stat. & Data Analysis, 1996.Gene Golub and Victor Pereyra. Separable nonlinear least squares: the variable projec9on method and its applica9ons. Inverse Problems, 19(2):R1, 2003.G.H. Golub and V. Pereyra. The differen9a9on of pseudo-‐inverses and nonlinear least squares which variables separate. SIAM J. Numer. Anal., 10(2):413–432, 1973.M. R. Osborne. Separable least squares, variable projec9on, and the Gauss-‐Newton algorithm. Electronic Transac9ons on Numerical Analysis, 28(2):1–15, 2007.R G Praa, C Shin, and Gj Hicks. Gauss-‐newton and full newton methods in frequency-‐space seismic waveform inversion. Geophysical Journal Interna9onal, 1998.M. P. Friedlander and M. Schmidt. Hybrid determinis9c-‐stochas9c methods for data fidng. SIAM J. Scien9fic Compu9ng, 34(3), 2012 (submiaed April 2011)