Embed Size (px)
Citation preview

Real Time Implementation of Improved PSO Tuning for a Conical Tank
Process used in Biodiesel Production
D.Mercy1 and S.M.Girirajkumar
2
1Department of EEE, St.Joseph’s College of Engineering & Technology, Thanjavur, India
2Department of ICE, Saranathan College of Engineering, Tiruchirappalli, India
Abstract:
The particle swarm optimization is a stochastic optimization technique for finding
optimal regions of nonlinear continuous functions through the interaction of individuals in the
swarm. An improved particle swarm optimization (IPSO) algorithm is proposed in this study
in all applications. The usefulness of this method is verified through a comparative study with
classical PID controller tuning methods, heuristic method such as Particle Swarm
Optimization (PSO) and an improved particle swarm optimization (IPSO). A real time
implementation of the proposed method is carried on a nonlinear conical tank process using
LabVIEW module; this design can be applicable for biodiesel production plant and it is
evident that the IPSO algorithm executes fine on a nonlinear unstable process models. The
IPSO tuned controller offers improved process characteristics such as better time domain
specifications, smooth reference tracking, supply disturbance rejection, and error
minimization compared to other controller tuning methods.
Keywords: PID Controller, PSO, IPSO, Nonlinear Process, Conical tank process, LabVIEW.
1. Introduction
A stand alone control algorithm used to tune
the linear process in a classical way, usually called
as PID (Proportional Integral Derivative)
controller. PID controller is one of the earliest and
most popular controllers. The advanced PID
controllers and classical PID controllers have been
associated with different types of industries so the
tuning methods are still developing. The PID
controller was proposed by Norm Minorsky in
1922. Now days the researchers are mainly
concentrating on the adaptive and optimized
controller which deals with more complicated
process. Now a day researchers are developing
various algorithms for the tuning the PID controller
although Zeigler Nichols PID tuning method is the
base for all tuning methods. Bhawana Singh and
Neelu Joshi discussed about the various classical
and optimized tuning methods . Marshiana et al
proposes the controller design for nonlinear
systems using Fractional order PI controller
(FOPIC) technique which offers victory as a result
of valuable methods in differentiation and
integration and they offer additional flexibly in the
controller design [13]. Suji Prasad et al proposed
the particle swarm optimization based PID
controller[14] tuning used for the performance
analysis. S.Nithya et al proposed the model based
tuning methods of PID controller for a real time
systems[28].
Based on the literature review, the proposed
system includes classical PID tuning and improved
optimized PID tuning for a conical tank process.
Classical PID tuning method is applicable for the
linear process and for a nonlinear process improved
optimized PID tuning is proposed. Conical tank
system is a difficult and important criterion due to
its nature of the shape which can increases the
nonlinearity of the process. To overcome the
nonlinearity of the conical tank process improved
optimized control techniques are widely used. In
the proposed system mathematical modeling of a
conical tank system is derived and the final transfer
function is obtained. The obtained transfer function
is used to get the simulation and the real time
response for various tuning methods. The response
curves are plotted for each tuning values.
Comparative study is performed to analyze the
response curves based on the time domain
International Journal of Pure and Applied MathematicsVolume 118 No. 18 2018, 2051-2062ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version)url: http://www.ijpam.euSpecial Issue ijpam.eu
2051

specifications and error criteria. From the results
IPSO based PID tuning method provides better
results.
2. Mathematical modeling of a conical
tank system
Mathematical modeling of conical tank system
is derived based on the structure and the output
transfer function is obtained. The output equations
are well formulated and assumed as a process
model structure with optimization. Optimized PID
tuning is an effective tool for tuning of a controller.
To derive the mathematical modeling of a conical
tank, the input of the process should be initialized
and the input and output relations should be known
and should be properly defined. The primary task is
to understand the system and the system need to be
investigated to realize the incident of nonlinearity
present in the system dynamics. Now days, the
utility of Improved Particle Swarm Optimization
Algorithm is extensively increasing because of its
high accurate, fast and optimal responses compared
with conventional techniques [4]. The proposed
conical tank system, identified as a nonlinear
complex structure is shown in Fig. 1.
Fig:1 Structure of conical tank system
Where,
H = Total height of the conical tank
Fin = Input flow rate of conical tank
Fout = Output flow rate of conical tank
R = Top radius of conical tank
r = Radius of nominal level of the tank
Mass balance Equation is given by
Fin-Fout = A1dh/dt ------------------- (1)
Fout = b √h ------------------ (2)
Where, b = a √(2g)
a = Outlet area of the tank
g = Acceleration due to gravity
By substituting the Equation and considering the
cross sectional area of the tank at level H is given
by,
Tanθ = r/H, A=пr2 ------------- (3)
r = R2h2/H2
A = пR2h2/H2 ------------- (4)
The nonlinear dynamics of the system is expressed
by the FOPDT (first order process with delay time).
The standard transfer function of nonlinear conical
tank system is obtained and is written as,
H(S) /Q1(S) = Re−θs / τS+1 ----- (5)
Where,
R = Gain constant
θ = Time delay
τ = Time constant.
The standard transfer function is modelled
with standard step input to obtain the response
curve. The timing corresponds to the 35.3% and
85.3% the value of t1 and t2 are calculated. The
parameters τ and θ are calculated as follows [1].
τ = 0.67(t2 −t1) ----------------- (6)
θ = 1.3t1 −0.29t2 ----------------- (7)
The input and output flow rate of the conical
tank process is kept constant to approach the
equilibrium state and the output is noted for each
increment. Different readings are observed until the
conical tank process reaches the stable state. By
International Journal of Pure and Applied Mathematics Special Issue
2052

substituting the gain constant, time delay, time
constant in the transfer function equation (5) and it
is approximated as FOPDT model. The derived
process model of a conical tank process is given by,
G(s) = 14.62 e – 5.8s /134.6 S+1 ----------- (8)
where, Gain constant, R = 14.62
Time delay, θ = 5.8 sec
Time constant τ = 134.6
Equation (8) describes about the transfer
function of a real time conical tank process used in
biodiesel production plant. The obtained transfer
function is tuned with different tuning methods and
the response curve is plotted. The plotted results
are compared based on the time domain
specifications and error values. The best tuning
method is concluded based on the plotted results.
3. Classical PID tuning methods
―PID‖ is a short form for Proportional
Integral Derivative controller that includes
elements with three functions. The PID controller is
a conventional controller combines the three error
functions that is control error, integration of the
error value, and derivation of the error value. The
PID controller is helpful to control the output
results, if three terms of controllers are constructed
with inclusion of nonlinear function [30]. There are
widespread papers present distinct methods to
layout nonlinear PID controller. Including all
nonlinear controllers some of the nonlinear
controllers are mostly used in engineering
applications. The reason for that is the linear
controller is converted as a nonlinear based on
simple specifications. Controller tuning is a process
of adjusting the control parameters Kp, Ki and Kd
to reach the optimum values and to obtain the
desired control response. Tuning of the controller is
essential for maintaining the system stability. The
following tuning rules are effectively used to tune
the PID controller of a conical tank system in a
classical way.
1. Ziegler–Nichols (Z–N) method (1942):
Controller tuning is based on the value ultimate
gain and the value of ultimate period.
2. Cohen–Coon (C–C) method (1953): Tuning of
the controller is Based on Process reaction curve.
3. Shinskey tuning method (1990):
Kc = , Ti = , Td=
4. Maclaurin tuning method (1990):
Kc= , Ti = , Td =
5. Connel tuning method (1987): Tuning of the
controller is Based on Process reaction .
Kc = , Ti = , Td =
6. K.J.Astrom and T.Hagglund tuning
method(1984): Integral gains of PID controller.
Kc = , Ti = 2 d , Td= 0.5 d
4. PSO tuning for a conical tank system
Particle Swarm Optimization is a strong
random functional technique is initiated by the
scattering of particles in the search space and
swarm intelligence. PSO is a concept related to the
problem solving based on public interaction.
Particle Swarm Optimization method was invented
by James Kennedy and Russell Eberhart. This
method exploits a numerous representatives that
compose a flock scattering around in the search
space and come across for the high quality solution.
Each particle in the search space is treated as a
point which fine-tunes its airborne terminology
according to its personal practice and the airborne
information of the additional particles present in
the system. The PSO algorithm has to follow three
steps and it has to repeat the steps still reaching the
stopping condition.
Calculate the fitness of each particle.
Revise individual and global best fitness
and positions.
Revise the velocity and location of each
particle.
Every particle in the search space sustain
the track of records and are related with the high
efficient result that have been recognized by the
particles. This is known as personal best, pBest.
The obtained new finest value is tracked using the
PSO technique is the finest value accomplished up
to now through every particle in the locality of that
dK
889.0
d75.1d70.0
dK
94.0
dk
6.1`6667.1 d d4.0
)( d
i
k
T
)(2
2
d
d
)(2
2
d
d
i
d
T31
International Journal of Pure and Applied Mathematics Special Issue
2053
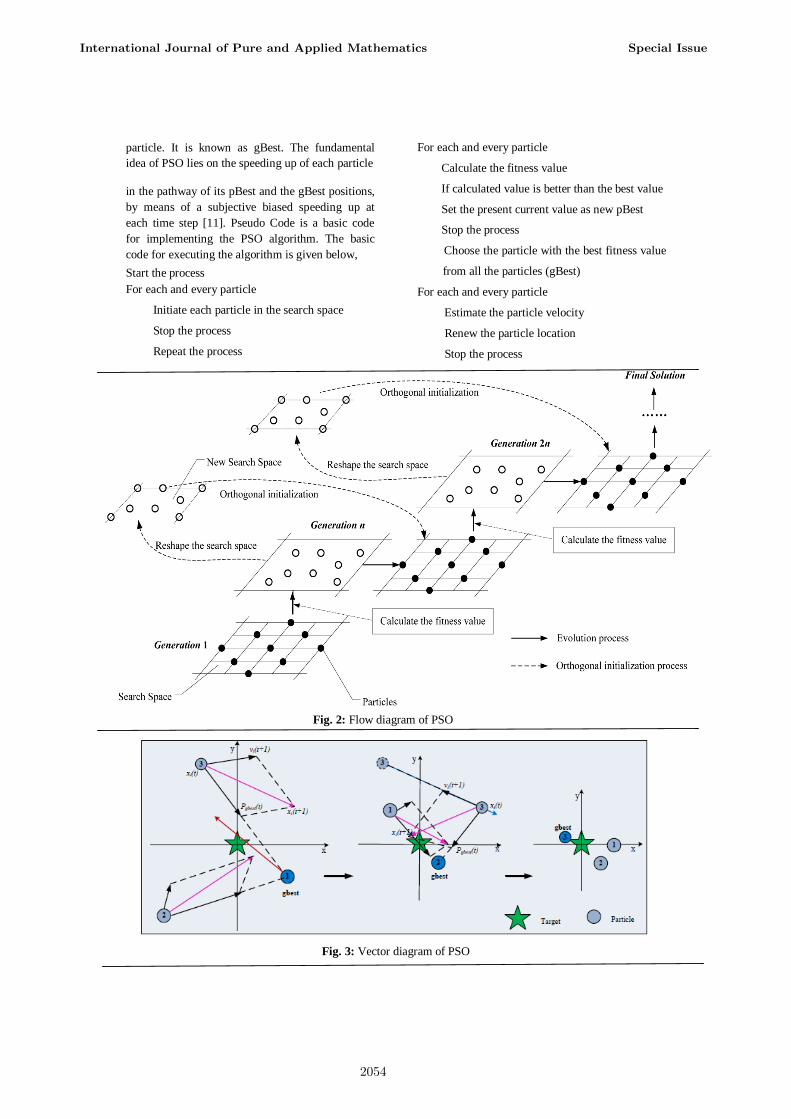
particle. It is known as gBest. The fundamental
idea of PSO lies on the speeding up of each particle
in the pathway of its pBest and the gBest positions,
by means of a subjective biased speeding up at
each time step [11]. Pseudo Code is a basic code
for implementing the PSO algorithm. The basic
code for executing the algorithm is given below,
Start the process
For each and every particle
Initiate each particle in the search space
Stop the process
Repeat the process
For each and every particle
Calculate the fitness value
If calculated value is better than the best value
Set the present current value as new pBest
Stop the process
Choose the particle with the best fitness value
from all the particles (gBest)
For each and every particle
Estimate the particle velocity
Renew the particle location
Stop the process
Fig. 2: Flow diagram of PSO
Fig. 3: Vector diagram of PSO
International Journal of Pure and Applied Mathematics Special Issue
2054

In the proposed system optimized tuning
values are identified based on iteration values.
From the classical PID tuning methods best Kp, Ki,
Kd values are obtained. The obtained values are
used to initialize the PSO tuning method and
initialization of PSO tuning includes the parameter
initialization process. To introduce PSO, numerous
parameters want to be described. Parameter
initialization is a process of initiating the dimension
of the search space, number of iterations and
velocity constants. The dimension of the flock
satisfies the necessity of global optimization and
working out cost. Initial inputting of the parameters
are as per the table. After the completion of the
iteration global best and local best values are
obtained.
Table.1 PARAMETER INITIALIZATION
The most significant method of applying the
PSO algorithm is to choose the objective function
which is used to estimate the fitness of each
Particle.Most of the process uses performance
indices as an objective function. The objective
functions are Mean of the Squared Error, Integral
of Time Absolute Error, Integral of Absolute Error,
and Integral of the Squared Error. Based on the
above objective function various error criteria were
calculated for each tuning methods and the error
values are compared. The PID controller is
employed to reduce the error value and it will be
defined more thoroughly based on the error
criterion. If the performance indices values are
smaller it gives the best results and for higher
values it will not provide good results [3].
5. Improved PSO tuning for a conical tank
system
PSO algorithm has the advantages of simple
structure, less parameters and fast convergence, it
is easy to fall into local extreme value, and it
cannot obtain globally optimal solution. There are
two main reasons for this phenomenon:
The character of optimization function.
Due to the inappropriate parameter design and
population size of algorithm in the operation
process.
The two reasons will rapidly disappear the diversity
of particles in the process of calculation, and cause
the premature phenomenon. The inertia weight and
learning factor are improved and the parameters of
PSO algorithm are initialized by using chaotic
characteristic in order to the global optimization
ability in this paper. The basic code for executing
the IPSO algorithm is given below,
Begin the process
Initialize the parameters including
population size, the dimension size and the
maximum iteration number.
Generate the initial population and initial
velocity.
Calculate the fitness value of each particle
and record best fitness and its
corresponding position.
Calculate the population’s best fitness and
its corresponding position.
Compute population centroid with the
weighted coefficient.
Update the velocity and weight values.
Calculate the best fitness values.
End
In the classical PSO algorithm, the moving
speed of particles is fast, but the regulations of
cognition component and social component make
particles move around global point. Based on the
velocity and position regeneration formula, once
the finest individual in the swarm is trapped into a
local optimum, the information sharing mechanism
in PSO will attract other particles to approach this
local optimum steadily, and the whole swarm
converged at this position. When the number of
iteration increase, the velocity of particles will
become zero at the end, then the whole swarm is
hard to jump out of the local optimum and has no
way to attain the global optimum. At this time, the
whole swarm will be converged at one point in the
solution space, if gbest particles haven't found
gbest, the whole swarm will be trapped into a local
optimum; and the capacity of swarm jump out of a
local optimum is rather feeble. In order to get
through this disadvantage, in this paper we presents
a new algorithm based on PSO. In order to avoid
being trapped into a local optimum, this will surely
enlarge the global searching space of particles and
enable them to avoid being trapped into a local
Population Dimension 50
Iteration Count 150
Constant Velocity ,c1 2
Constant Velocity ,c2 2
International Journal of Pure and Applied Mathematics Special Issue
2055

optimum too early, in the same time, it will
improve the possibility of finding gbest in the
searching space. Based on the following tabulation
best fitness values are calculated using the IPSO
algorithm.
Table.2 FUNCTIONS OF IPSO
Fig. 4: Block diagram of IPSO
Table.3 PID TUNING PARAMETERS
Tuning Methods Kp Ki Kd
Z-N 1.55 0.36 3.42
Cohen & Coon 1.42 0.32 3.15
Shinskey 1.36 0.29 3.05
Maclaurin 1.14 0.26 2.54
Connel 0.98 0.24 2.18
Astrom & Hagglund 0.91 0.19 2.01
PSO 0.52 0.11 1.35
IPSO 0.21 0.08 0.14
International Journal of Pure and Applied Mathematics Special Issue
2056

The block diagram of IPSO is shown in figure.4.
Based on the block diagram by using the improved
particle swam optimization method the PID
controller is tuned using various tuning
methods.PID parameters are calculated using
various tuning methods and the Kp, Ki, Kd values are tabulated and best tuning values are analysed.
5. Uses of Conical Tank in Biodiesel Production
Conical bottom tanks are the ideal solution
for getting every last drop out of the tank. The
conical bottoms facilitate quick and complete
drainage. Conical bottom tanks are also referred to
as sloped bottom tanks, conical tanks and full drain
tanks, fermenter tanks, brewing tanks, and mixing
tanks.
They are commonly used in the industrial,
agricultural, commercial, manufacturing, and water
treatment sectors. Now a day farmers from corner
to corner of the country are switching to make their
own biodiesel with the help of conical bottom tanks
easily. Using waste vegetable oils from farming
and catering sources biodiesel are produced with
three relatively simple stages includes;
pre-treatment, reactions and product purification.
The concluding of which relies on impurities and
sediments falling to the bottom of the conical tanks
where it can be drained away completely. The
block diagram shown in fig.5 is the biodiesel
production plant. Conical bottom tank plays a vital
role in all stages of the process in biodiesel
production plant.
Fig. 5: Block diagram of a biodiesel production plant using cone bottom tank
Fig. 6: Real Time
Experimental setup
International Journal of Pure and Applied Mathematics Special Issue
2057

6. Real Time Experimental Setup
The non-linear behaviour of the conical tank
system is identified by constant input flow rate.
The maximum height of the tank is 150 cm. Input
to the tank is incremented stepwise, the current to
the system is maintained at 4-20 mA and passes all
the way through the serial port RS - 232 along
DAQ interface unit. Through manual control
method, specified transform at input value the
output response of the process is documented.
Using controller tuning methods the time constant
and delay time of a FOPTD process is constructed
using tangent method based on its point of
inflection. The experimental real time setup of the
proposed system consists of conical tank process,
water reservoir, centrifugal pump, rotameter, an
electro pneumatic converter and pneumatic control
valve. The output signal from the process is
interfaced with a computer using compact DAQ
through RS-232 serial port. Thus the coding were
developed using LabVIEW software and interfaced
using DAQ module. The Fig.5 above shows the
experimental setup of the automated process.
In Fig. 5 water reservoir is used as a storage
tank. Centrifugal pump is used to pump the water
from the reservoir and circulates the water
throughout the plant. The rotameter is a type of
flow meter used to compute the flow rate of liquids
and gases in industries. An electro pneumatic
converter converts a 4 to 20 mA input signal to a
directly proportional (3 to 15 psi) pneumatic output
signal. Pneumatic control valve is used to control
the flow rate. The pneumatic valve used here is
―air to close valve‖ which is used to adjust the
water flow in the conical tank system. The height
of the conical tank process is obtained through
computational method and broadcasted in the form
of current range between (4–20) mA. Hardware and
software of the system are interfaced by means of
DAQ system. The input to the system is regulated
and tuned using optimal tuning method. The
control action is performed by executing LabVIEW
coding, based on the hardware interface. The
control signal controls the valve position thus
controls the level of the conical tank.
7. Results and Discussion
The output reaction of conical tank system
using PID controller is determined and the results
are recorded. The response of the controllers are
estimated and evaluated in the form of rise time,
overshoot and settling time with existence of
measurement noise. The controller output is
evaluated based on the performance index, if the
error values are lesser than the controller is
consider as a best controller. PSO tuning
terminology provides an iteration based analysis
were we can get the optimized local best and global
best values. This value can be used to get quick
steady state response [5].
The real time LabVIEW software is used to
analyse the results based on controller tuning
method and controls the actions automatically. The
various PID tuning methods like Astrom and
Huggland, CC Method, ZN method, Shinskey
method, PSO, IPSO method are compared using
the LabVIEW coding shown in Fig.7.
Fig. 7: LabVIEW coding
Fig. 8: LabVIEW Response
International Journal of Pure and Applied Mathematics Special Issue
2058
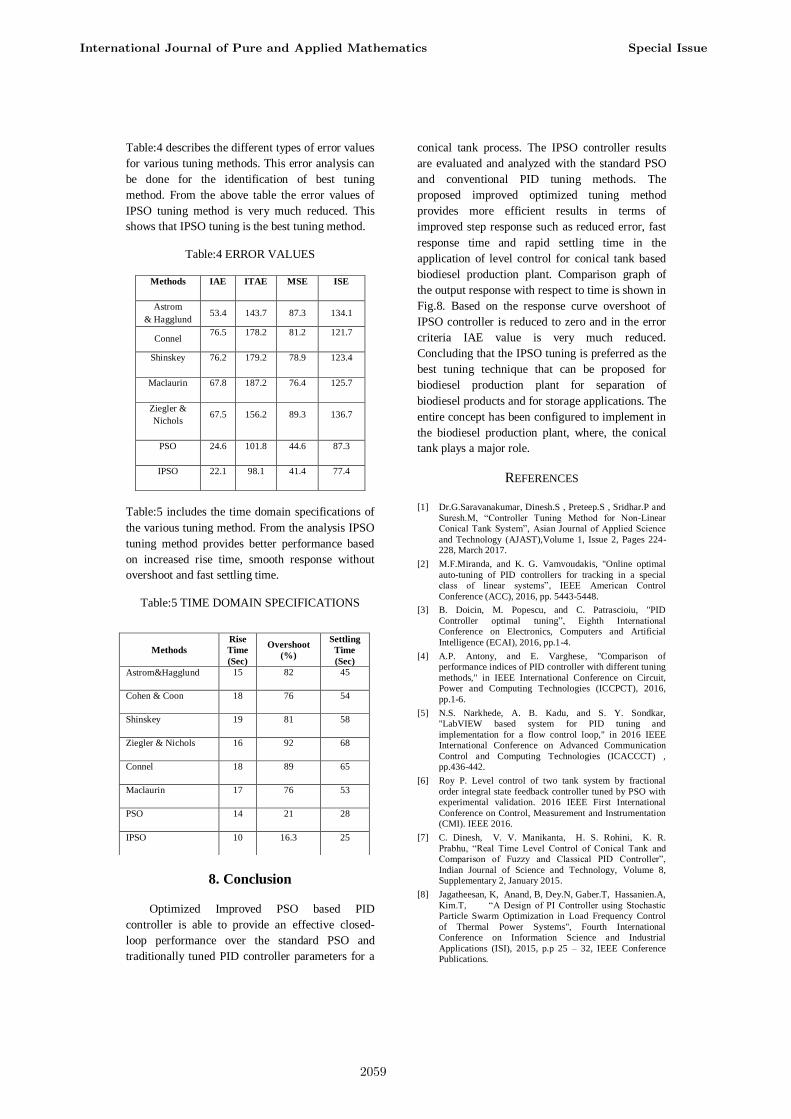
Table:4 describes the different types of error values
for various tuning methods. This error analysis can
be done for the identification of best tuning
method. From the above table the error values of
IPSO tuning method is very much reduced. This
shows that IPSO tuning is the best tuning method.
Table:4 ERROR VALUES
Methods IAE ITAE MSE ISE
Astrom
& Hagglund 53.4 143.7 87.3 134.1
Connel 76.5 178.2 81.2 121.7
Shinskey 76.2 179.2 78.9 123.4
Maclaurin 67.8 187.2 76.4 125.7
Ziegler &
Nichols 67.5 156.2 89.3 136.7
PSO 24.6 101.8 44.6 87.3
IPSO 22.1 98.1 41.4 77.4
Table:5 includes the time domain specifications of
the various tuning method. From the analysis IPSO
tuning method provides better performance based
on increased rise time, smooth response without
overshoot and fast settling time.
Table:5 TIME DOMAIN SPECIFICATIONS
8. Conclusion
Optimized Improved PSO based PID
controller is able to provide an effective closed-
loop performance over the standard PSO and
traditionally tuned PID controller parameters for a
conical tank process. The IPSO controller results
are evaluated and analyzed with the standard PSO
and conventional PID tuning methods. The
proposed improved optimized tuning method
provides more efficient results in terms of
improved step response such as reduced error, fast
response time and rapid settling time in the
application of level control for conical tank based
biodiesel production plant. Comparison graph of
the output response with respect to time is shown in
Fig.8. Based on the response curve overshoot of
IPSO controller is reduced to zero and in the error
criteria IAE value is very much reduced.
Concluding that the IPSO tuning is preferred as the
best tuning technique that can be proposed for
biodiesel production plant for separation of
biodiesel products and for storage applications. The
entire concept has been configured to implement in
the biodiesel production plant, where, the conical
tank plays a major role.
REFERENCES
[1] Dr.G.Saravanakumar, Dinesh.S , Preteep.S , Sridhar.P and
Suresh.M, ―Controller Tuning Method for Non-Linear Conical Tank System‖, Asian Journal of Applied Science
and Technology (AJAST),Volume 1, Issue 2, Pages 224-228, March 2017.
[2] M.F.Miranda, and K. G. Vamvoudakis, "Online optimal
auto-tuning of PID controllers for tracking in a special class of linear systems‖, IEEE American Control
Conference (ACC), 2016, pp. 5443-5448.
[3] B. Doicin, M. Popescu, and C. Patrascioiu, "PID
Controller optimal tuning‖, Eighth International Conference on Electronics, Computers and Artificial
Intelligence (ECAI), 2016, pp.1-4.
[4] A.P. Antony, and E. Varghese, "Comparison of performance indices of PID controller with different tuning
methods," in IEEE International Conference on Circuit, Power and Computing Technologies (ICCPCT), 2016,
pp.1-6.
[5] N.S. Narkhede, A. B. Kadu, and S. Y. Sondkar, "LabVIEW based system for PID tuning and
implementation for a flow control loop," in 2016 IEEE International Conference on Advanced Communication
Control and Computing Technologies (ICACCCT) , pp.436-442.
[6] Roy P. Level control of two tank system by fractional
order integral state feedback controller tuned by PSO with experimental validation. 2016 IEEE First International
Conference on Control, Measurement and Instrumentation (CMI). IEEE 2016.
[7] C. Dinesh, V. V. Manikanta, H. S. Rohini, K. R.
Prabhu, ―Real Time Level Control of Conical Tank and Comparison of Fuzzy and Classical PID Controller‖,
Indian Journal of Science and Technology, Volume 8, Supplementary 2, January 2015.
[8] Jagatheesan, K, Anand, B, Dey.N, Gaber.T, Hassanien.A,
Kim.T, ―A Design of PI Controller using Stochastic Particle Swarm Optimization in Load Frequency Control
of Thermal Power Systems", Fourth International Conference on Information Science and Industrial
Applications (ISI), 2015, p.p 25 – 32, IEEE Conference Publications.
Methods
Rise
Time
(Sec)
Overshoot
(%)
Settling
Time
(Sec)
Astrom&Hagglund 15 82 45
Cohen & Coon 18 76 54
Shinskey 19 81 58
Ziegler & Nichols 16 92 68
Connel 18 89 65
Maclaurin 17 76 53
PSO 14 21 28
IPSO 10 16.3 25
International Journal of Pure and Applied Mathematics Special Issue
2059

[9] B. K. Sahu, S. Pati, P. K. Mohanty, and S. Panda.
"Teaching–learning based optimization algorithm based fuzzy-PID controller for automatic generation control of
multi-area power system", Applied Soft Computing, 2015,pp.240-249.
[10] V. Rajinikanth, and S.C. Satapathy, "Design of controller for automatic voltage regulator using teaching learning
based optimization‖, Procedia Technology (2015),pp. 295-302.
[11] P.G. Medewar and R. K. Munje, "PSO based PID
controller tuning for PMDC motor," in International Conference on Energy Systems and Applications, 2015,
pp. 522-526.
[12] N. Gireesh, and G. Sreenivasulu, "Comparison of PI Controller Performances for a Conical Tank Process using
different tuning methods‖, IEEE International Conference on Advances in Electrical Engineering (ICAEE), 2014,
pp.1-4.
[13] Marshiana D, Thirusakthimurugan P. Fractional order PI controller for nonlinear systems Control, Instrumentation,
Communication and Computational Technologies (ICCICCT). Int Conf IEEE, 2014, pp. 322-326.
[14] T.K.Sethuramalingam and B.Nagaraj, ―A Comparative
Approach On Pid Controller Tuning Using Soft Computingtechniques‖, International Journal of
Innovations in Scientific and Engineering Research (IJISER),vol.1,No.12, pp.460-465,2014.
[15] T.Pushpaveni, S.Srinivasulu Raju, N.Archana,
M.Chandana, ―Modeling and Controlling of Conical Tank System Using Adaptive Controllers and Performance
Comparison with Conventional PID‖, International Journal of Scientific & Engineering Research, Volume 4, Issue 5,
May-2013.
[16] Abhishek Sharma and Nithya Venkatesan,‖ Comparing PI
controller Performance for Non Linear Process Model‖, International Journal of Engineering Trends and
Technology- Volume 4, Issue 3- 2013.
[17] R.Arivalahan, S.Hosimin Thilagar and D. Devaraj, ―Investigation of Fuzzy Logic Controller for Conical Tank
Process‖, European Journal of Scientific Research, Vol. 92 No.2, pp.191-202, December 2012.
[18] H.Kiren Vedi, K.Ghousiya Begum, D.Mercy,
E.Kalaiselvan, ―A Comparative Novel Method of Enhanced Tuning of Controllers for Non-Linear Process‖,
National System Conference, pp., December 2012.
[19] Ganesh Ram and S. Abraham Lincoln, ―Fuzzy Adaptive PI Controller For Single Input Single Output Non-linear
System‖, ARPN Journal of Engineering and Applied Sciences, Vol. 7, No. 10,pp.1273 – 1280,October 2012.
[20] K. BarrilJawatha, ―Adaptive Control Technique for Two
Tanks Conical Interacting System‖, International Conference on Computing and Control Engineering
(ICCCE 2012), 12 & 13 April, 2012.
[21] V.R.Ravi, T.Thyagarajan ―Application of Adaptive Control Technique to Interacting Non Linear Systems
―Electronics Computer Technology (ICECT), 2011 3rd International Conference on 8-10 April 2012 pp: 386
– 392.
[22] Sukanya R. Warier, Sivanandam Venkatesh ―Design of
Controllers based on MPC for a Conical Tank System‖, IEEE-International Conference On Advances In
Engineering, Science And Management (ICAESM -2012) March 30, 31, 2012.
[23] Vijayakarthick, M. and P.K. Bhaba, ―Optimized Tuning of
PI Controller for a Spherical Tank Level System Using New Modified Repetitive Control Strategy‖, International
Journal of Engineering Research and Development, 3(6): 74-82, 2012.
[24] R.Valarmathi, P.R.Theerthagiri, S.Rakeshkumar, ‖Design
and Analysis of Genetic Algorithm Based Controllers for Non Linear Liquid Tank System‖, IEEE-International
Conference on Advances in Engineering, Science and Management (ICAESM -2012) March 30, 31, 2012.
[25] V.R.Ravi, T.Thyagarajan, ―A Decentralized PID controller
for interacting non-linear systems.‖ICETECT 2011 pp 297-302.
[26] G. Sakthivel , T. S. Anandhi and S. P.Natarajan, ―Modelling and Real Time Implementation of Digital PI
Controller for a Non Linear Process‖Journal of Innovative Research in Engineering and Sciences, September 2011.
[27] S.Nithya,N.Sivakumaran,T.K.Radhakrishnan,
N.Anantharaman,‖Control of nonlinear process using soft Computing‖ IUP 2010.
[28] S.Nithya, N.Sivakumaran, T.Balasubramanian, and
N.Anantharaman, ―Design of controller for nonlinear process using soft computing‖, Instrumentation Science
and Technology, vol. 36, no. 4, pp. 437–450, 2008.
[29] N.S. Bhuvaneswari, G. Uma & T.R. Rangaswamy, Neuro based ―Model Reference Adaptive control of a conical
tank level process‖,Control and Intelligent Systems, Vol. 36, No. 1, 2008, pp. 1-9.
[30] B.Wayne-Bequette, Process Control—Modeling, Design
and Simulation, Prentice-Hall, New Delhi, India, 2003.
[31] Aidan o’Dwyer, ―Hand book of PI and PID controller tuning rules‖, Thrid Edition.
Authors Details
Mrs.D.Mercy received her Bachelor’s
degree in Electronics and Instrumentation
Engineering from Jayaram College of
Engineering and Technology, Trichy and
her Post Graduate degree in Control
Systems &Instrumentation Engineering from SASTRA
University, Thanjavur. She is currently doing her PhD under the
Faculty of Electrical Engineering in the area of Process Control
in Anna University Chennai. She has around 11 years of
teaching experience in various engineering colleges. Presently
she is serving as an Assistant Professor and Head in the
Department of Electrical and Electronics Engineering at
St.Joseph’s College of Engineering and Technology, Elupatti,
Thanjavur. She has published more than 15 research papers in
various International Journals and Conference Proceedings. Her
area of interest includes Control systems, Process Modeling,
Fuzzy Logic, Genetic Algorithm and optimization techniques
etc.
Dr. S.M Girirajkumar received his
Bachelor’s degree in Electronics and
Instrumentation Engineering from
Annamalai University and his M.Tech +
Integrated Ph.D (M.Tech-Control System
Based, Ph.D-Electrical Engineering) from
SASTRA University, Thanjavur. He has
around 18 years of teaching experience in
various engineering colleges and around 3 years of Industrial
experience. Presently he is serving as a Professor and Head in
the Department of Instrumentation and Control Engineering at
Saranathan College of Engineering, Trichy. He has published
more than 80 research papers in various International, National
Journals and Conference Proceedings. He has obtained various
grants from Government of Tamilnadu and completed the
funded projects. He is a recognized research supervisor for Anna
University of Technology, Tiruchirappalli, and Chennai
associated with EEE department. He is Guiding 4 scholars for
their PhD work, through Anna University of Technology,
Tiruchirappalli and Guiding 6 scholars for their PhD work,
through Anna University of Technology, Chennai. His area of
International Journal of Pure and Applied Mathematics Special Issue
2060

interest includes Control systems, Process Control, Industrial
Automations and Programmable Logic Controller.
International Journal of Pure and Applied Mathematics Special Issue
2061

2062





























