Embed Size (px)
Citation preview

Reachability in Two-Dimensional Vector AdditionSystems with States is PSPACE-complete
Michael Blondin1,2 Alain Finkel1 Stefan Göller1
Christoph Haase1 Pierre McKenzie1,2
1LSV, ENS Cachan & CNRS, France
2DIRO, Université de Montréal, Canada
July 6, 2015

Vector addition systemsReachability problem
New resultsDefinitionRuns
Vector addition system with states (VASS)
d-VASS:
d ≥ 1 (dimension)Q finite set (states)T ⊆ Q ×ZdZdZd × Q finite (transitions)
p q(0, 1)
(0,−2)
(1, 1)
1 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Vector addition system with states (VASS)
d-VASS:d ≥ 1 (dimension)
Q finite set (states)T ⊆ Q ×ZdZdZd × Q finite (transitions)
p q(0, 1)
(0,−2)
(1, 1)
1 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Vector addition system with states (VASS)
d-VASS:d ≥ 1 (dimension)Q finite set (states)
T ⊆ Q ×ZdZdZd × Q finite (transitions)
p q(0, 1)
(0,−2)
(1, 1)
1 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Vector addition system with states (VASS)
d-VASS:d ≥ 1 (dimension)Q finite set (states)T ⊆ Q ×ZdZdZd × Q finite (transitions)
p q(0, 1)
(0,−2)
(1, 1)
1 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 0)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0)
t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 0)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0)
t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 1)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1)
t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 1)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1)
t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 1)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1)
t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 2)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2)
t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 2)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2)
t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 0)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0)
t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(0, 0)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0)
t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p q(1, 1)
t1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1−→ p(0, 1) t1−→ p(0, 2) t2−→ q(0, 0) t3−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) t1t1t2t3−−−−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionRuns
Runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
p(0, 0) ∗−−−−→ p(1, 1)
2 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Reachability problem
Input: d-VASS V
and p(u), q(v) ∈ Q × Nd
Question: p(u) ∗−→ q(v)?
0
3 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Reachability problem
Input: d-VASS V and p(u), q(v) ∈ Q × Nd
Question: p(u) ∗−→ q(v)?
0
p(u)
q(v)
3 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Reachability problem
Input: d-VASS V and p(u), q(v) ∈ Q × Nd
Question: p(u) ∗−→ q(v)?
0
p(u)
q(v)
3 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
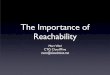
Known results timeline
1976
EXPSPACE-hard (Lipton)
1979
Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981
Decidable (Mayr)
1982
Decidable (Kosaraju)
1986
2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979
Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981
Decidable (Mayr)
1982
Decidable (Kosaraju)
1986
2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981
Decidable (Mayr)
1982
Decidable (Kosaraju)
1986
2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982
Decidable (Kosaraju)
1986
2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986
2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992
Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004
{(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004 {(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011
Decidable (Leroux)
20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004 {(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011Decidable (Leroux)20122013
PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004 {(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011Decidable (Leroux)20122013 PSPACE-hard (Fearnley & Jurdziński)
2015
Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004 {(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011Decidable (Leroux)20122013 PSPACE-hard (Fearnley & Jurdziński)
2015Fω3 (Leroux & Schmitz)
PSPACE-complete (our contribution)
in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsDefinitionKnown results
Known results timeline
1976EXPSPACE-hard (Lipton)
1979 Decidable (Hopcroft & Pansiot)
{v : p(u) ∗−→ q(v)} semilinear
1981Decidable (Mayr)
1982Decidable (Kosaraju)
1986 2-EXPTIME (Howell, Huynh, Rosier & Yen)
1992Decidable (Lambert)
2004 {(u, v) : p(u) ∗−→ q(v)} semilinear(Leroux & Sutre)
20092011Decidable (Leroux)20122013 PSPACE-hard (Fearnley & Jurdziński)
2015Fω3 (Leroux & Schmitz) PSPACE-complete (our contribution)in two talks!
VASS 2-VASS
4 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
Corollary
Reachability for 2-VASS ∈ PSPACE
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
Corollary: proof
Exp. length runs =⇒ exp. intermediate counter values
=⇒ poly. size intermediate counter values=⇒ guess run on the fly
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
Corollary: proof
Exp. length runs =⇒ exp. intermediate counter values=⇒ poly. size intermediate counter values
=⇒ guess run on the fly
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
Corollary: proof
Exp. length runs =⇒ exp. intermediate counter values=⇒ poly. size intermediate counter values=⇒ guess run on the fly
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Our main theoremThere exists c ∈ N s.t. for every 2-VASS V
p(u) ∗−→ q(v) =⇒ p(u) π−→ q(v) where |π| ≤ c |V |
How to prove this theorem?
5 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗
(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2
(t3t1∗t2)
∗
(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗
(t3t1∗t2)
· · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗
(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗
(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3t1∗t2)
∗
(t3t1∗t2) · · · (t3t1∗t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3
t1∗
t2)
∗
(t3
t1∗
t2) · · · (t3
t1∗
t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3
t1∗
t2)
∗
(t3
t1∗
t2) · · · (t3
t1∗
t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3
t1∗
t2)∗
(t3
t1∗
t2) · · · (t3
t1∗
t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Bounding the runs
p qt1: (0, 1)
t2: (0,−2)
t3: (1, 1)
Runs from p to q:
t1∗t2 (t3
t1∗
t2)∗
(t3
t1∗
t2) · · · (t3
t1∗
t2)
6 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤k ∈
∗-exponents ≤
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤k ∈
∗-exponents ≤
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤k ∈
∗-exponents ≤
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤ (|Q|+ ‖T‖)O(1)
k ∈ O(|Q|2)∗-exponents ≤ (|Q|+ ‖T‖+ ‖u‖+ ‖v‖)O(1)
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤ (|Q|+ ‖T‖)O(1)
k ∈ O(|Q|2)
∗-exponents ≤ (|Q|+ ‖T‖+ ‖u‖+ ‖v‖)O(1)
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤ (|Q|+ ‖T‖)O(1)
k ∈ O(|Q|2)∗-exponents ≤ (|Q|+ ‖T‖+ ‖u‖+ ‖v‖)O(1)
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤ exponentialk ∈ polynomial
∗-exponents ≤ exponential
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
2-VASS can always be flattened (Leroux & Sutre ’04)
∃S =⋃finite
α0β1∗α1 · · ·βk
∗αk︸ ︷︷ ︸linear path scheme
such that
p(u) ∗−→ q(v) =⇒ p(u) π∈S−−→ q(v)
2-VASS have small linear path schemes (our contribution)
|αi |, |βi | ≤k ∈
∗-exponents ≤
How to obtain such linear path schemes?
7 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
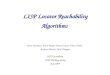
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1
Remove zigzags
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1
Remove zigzags
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1· · ·β∗kαk
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(u)
q(v)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 1: removing zig-zags
q(u)
q(v)
q(u)
q(v)
q(x)
q(y)
Arbitrary run⋃finite
α0β∗1α1 · · ·β∗kαk
⋃finite
γ0θ∗1γ1θ
∗2γ2
9 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1 Type 2
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1 Type 2
Composition of type 1
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
Small run
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
Type 1
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
Small run
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
Type 1
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Type 2: decomposition
0
p(u)rr
s sq(v)
Small run
10 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1 Type 2 Type 3
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Obtaining linear path schemes for 3 types of runs
0
q(u)
q(v)c
0
p(u)
q(v)
c
0
p(u)
q(v)
Type 1 Type 2 Type 3
' 1-VASS
8 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
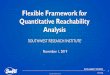
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
‖T‖p(u)
q(v)
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
Type 2
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
Type 1
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
Type 2
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
Type 1
11 / 12

Vector addition systemsReachability problem
New resultsMain theoremProof sketch
Every run decomposes into ≤ |Q|+ 1 runs of type 1, 2 & 3
0
p(u)
q(v)
q
p
qrp s
p
Type 3
11 / 12

Vector addition systemsReachability problem
New results
Open questions
2-VASS, unary encoding: NL-hard and ∈ NP. NL-complete?
3-VASS: PSPACE-hard and ∈ Fω3 . Better bounds?
12 / 12

Vector addition systemsReachability problem
New results
Open questions
2-VASS, unary encoding: NL-hard and ∈ NP. NL-complete?
3-VASS: PSPACE-hard and ∈ Fω3 . Better bounds?
12 / 12

Vector addition systemsReachability problem
New results
Thank you!
ありがとうございます!(arigato gozaimasu)