Embed Size (px)
Citation preview

Radiometric calibration of a UAV thermal camera
Julia Kelly ([email protected])1, Lars Eklundh2 and Natascha Kljun12
1 Department of Geography, Wallace Building, Swansea University, Singleton Park,
Swansea, SA2 8PP, UK 2 Department of Physical Geography and Ecosystem Science, Lund University, Sölvegatan
12, S-223 62 Lund, Sweden
Acknowledgements
This work was funded by a Short Term Scientific Mission grant from COST Action
OPTIMISE ES1309
1. Introduction
Thermal cameras specifically designed for use on Unmanned Aerial Vehicles (UAVs) have
become more widely available in the last few years, but producing accurate, high-quality
temperature data with these cameras is still non-trivial (Berni, et al., 2009; Stark, et al., 2014;
Ribeiro-Gomes, et al., 2017). Thermal cameras designed for use on UAVs use uncooled
microbolometers which are lightweight and consume very little power compared to
conventional cooled thermal cameras. However, uncooled microbolometers do not maintain a
constant temperature and thus are very sensitive to changes in camera and external atmospheric
temperature (Budzier, et al., 2015). These issues are especially problematic when conducting
UAV surveys as the camera is subjected to changing atmospheric temperature, solar radiation
and wind conditions. Uncooled microbolometer cameras can also exhibit significant sensor
noise, due to the ‘vignetting’ effect, whereby the wide-angle of the lens causes distortion in
temperature measurements across the sensor, and non-uniformity noise as a result of differing
responses of individual pixels across the sensor (Meier et al., 2011; Goodall et al., 2016).
Further challenges arise when using non-radiometric (but more affordable) thermal camera
models. They provide only raw data in digital numbers (DN) and calibration must be performed
by the user to produce surface temperature data (Gómez-Candón, et al., 2016).
The aim of this Short Term Scientific Mission (STSM) was to perform a radiometric
calibration, and evaluate the performance, of a FLIR Vue Pro 640 UAV thermal infrared
camera. The FLIR Vue Pro is a non-radiometric thermal camera with an uncooled vanadium
oxide (VOx) microbolometer. Laboratory experiments were conducted to meet the following
four objectives:
a. Assess the stabilization time of the camera
b. Generate blackbody calibration curves for the camera
c. Assess the effect of wind and heating on the camera
d. Assess sensor noise
The knowledge generated from these experiments was used to design a set of recommended
best practices for conducting UAV flights. A workflow for processing thermal camera images
from UAV flights in Agisoft Photoscan Pro was also produced based on several UAV flights
conducted over a mire ecosystem at Skogaryd Research Station (Sweden).

2
2. Methods
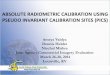
A blackbody radiator (emissivity: 0.992) was placed 32cm away from the camera so that the
entire device was visible in the camera field of view. A PT100 resistance thermometer recorded
the temperature of the blackbody radiator every second. The camera was mounted on a tripod,
with a copper-constantin thermocouple attached to the top surface of the camera case recording
its temperature every second. A Kestrel 4500 pocket weather monitor recorded air temperature,
relative humidity and wind speed every 30 seconds. The experimental setup is illustrated in
Figure 1.
2.1 Assessing camera stabilization time
The purpose of the experiment was to assess the length of time required after switch on for the
camera to produce stable DN values. The camera was switched on and recorded images of the
blackbody radiator every 30 seconds for 2 hours. The blackbody radiator maintained a constant
temperature at 18.4°C (σ=0.2°C). To assess the change in camera raw signal over time, a
circular area representing the centre of the blackbody was selected on all the images recorded.
The same circle was used for all images and covered 33% of the total number of pixels in an
image. The mean DN value of all pixels within this circle was calculated for each image and
plotted over time. The results of the experiment showed the camera required a one hour
stabilization time and this was implemented before all further experiments.
2.2 Blackbody calibration curve generation
The FLIR Vue Pro 640 is not radiometric therefore it was essential to generate calibration
curves to model the relationship between camera raw signal and observed temperature. The
blackbody radiator was cooled in an incubation chamber overnight (Conviron CMP4030) at
4°C (the minimum temperature of the chamber). The minimum temperature reached by the
blackbody was 6.5°C. After stabilization of the camera, the blackbody was placed 32cm way
Kestrel 4500
recording air
temperature
and humidity
Blackbody
radiator
Copper-constantan
thermocouple recording
FLIR Vue Pro case
temperature
FLIR Vue Pro 640
Blackbody radiator
power supply
PT100 resistance
thermometer recording
blackbody temperature
Figure 1. Photo of experimental setup and equipment for radiometric calibration of
FLIR Vue Pro.

3
from the camera. The temperature of the blackbody was increased in 5°C steps (6.5°C, 10°C,
15°C, 20°C, 25°C, 30°C, 35°C and 40°C). The camera recorded 20 images of the blackbody at
each temperature interval. During the experiment, room temperature was stable at 20.6°C
(σ=0.3°C).
The same experiment was repeated to investigate how camera temperature affects measured
DN values. The camera and blackbody were placed inside the incubation chamber which
maintained an atmospheric temperature at 10.8°C (σ=0.1°C). The blackbody was cooled
overnight in the chamber at 10°C and reached a minimum temperature of 10.3°C. The
temperature of the blackbody was then increased in 5°C temperature steps (10.3°C, 15°C,
20°C, 25°C). The maximum temperature attainable by the blackbody in the chamber was 25°C
at the maximum voltage supplied by its power source. Image processing for both experiments
followed the same method as described in section 2.1. The standard deviation of the DN values
was also calculated for each temperature step.
2.3 Assessing the effect of wind and heating on the camera
An experiment was performed to test the influence of wind and external heating on camera
performance, mimicking the windy conditions and direct sunlight the camera is exposed to
during UAV flight. The camera recorded images of the blackbody every 30 seconds. A fan was
placed 50cm away from the blackbody and camera to blow wind over the camera. The Kestrel
4500 pocket weather monitor was positioned opposite the fan to record air temperature,
humidity and wind speed. After the camera had stabilized, the fan was set to its lowest speed
setting (2.0m/s, σ=0.2m/s wind speed) for 30 minutes. The fan was then switched off and the
camera stabilized for 1 hour. Next the fan was switched to its highest speed setting (3.3m/s,
σ=0.2m/s wind speed) for 30 minutes. The camera was then stabilized for 1 hour. The fan speed
used is comparable to the speed at which the UAV is flown (<5m/s). A control period of 30
minutes ensued when the camera continued recording images of the blackbody without any
wind or heating effect. Finally, a 500W halogen lamp was placed several centimeters above
the camera to heat it. The camera was heated until it reached 45°C (5°C below the maximum
operating temperature of the camera). The lamp was then turned off to avoid overheating the
camera, and the camera continued recording images of the blackbody for 30 minutes. Image
processing followed the same method as described in section 2.1.
2.4 Assessing sensor noise
An experiment was performed to test for noise among pixels on the sensor array. The camera
was moved closer to the blackbody radiator (8cm apart) so that the blackbody radiator entirely
filled the field of view of the camera. In this way, each pixel on the camera sensor should have
recorded the same temperature. The blackbody temperature was stable at 19.1°C (σ=0.1°C).
After stabilization, the frame rate of the camera was increased to record one image every second
for 30 minutes (1800 images captured). Operating at a higher frame rate mimicked the
conditions during UAV flight when the camera is recording images very frequently.
To determine the spatial noise affecting the sensor, two statistical analyses were performed. To
test for the vignetting effect, the mean DN recorded by each pixel across all images was
calculated. The mean value of each pixel (‘pixel mean’) was compared to the mean value of all
pixels across all images (‘image mean’). The sensor layout was plotted, with the colour of each
pixel representing the relationship between the pixel mean and image mean. The final plot thus
shows the mean deviation of each pixel from the image mean (variation across spatial area of
the sensor).

4
The method outlined in Aubrecht et al (2016) was used to assess the severity of non-uniformity
noise patterns across the sensor. The mean image DN was subtracted from each image. The
deviation of each pixel from the image mean across the 1800 recorded images was then
correlated to the deviation of the centre pixel from the image mean across all images. The
correlation coefficients where then plotted for each pixel in their respective locations across
the sensor to show whether neighbouring pixels exhibit similar behaviour (as would be
expected if striped patterns were present on the sensor).
3 Results
3.1 Assessing camera stabilization time
The camera experienced significant fluctuations in raw signal output during the first 15 minutes
of operation and required approximately 1 hour to fully stabilize (Figure 4). The experiment
was repeated and produced similar results.
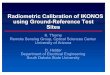
3.2 Blackbody calibration curve generation
Calibration curves were generated at room temperature (camera temperature = 38°C) and in a
cold incubation chamber (camera temperature = 20°C; Figure 5). The camera raw signal has a
linear response to observed temperature. The camera uses a narrow range of DN values (FLIR
Vue Pro records 14-bit images that range between 0-16383 DN). Furthermore, the average
image signal varies little between frames recorded at each temperature step (σ <4 DN for all
temperature steps recorded) suggesting the camera is sensitive to <1°C temperature changes.
However, the object temperature recorded by the camera is clearly affected by the temperature
of the camera itself, with lower camera temperature associated with lower DN for a given object
temperature.
Figure 2. FLIR Vue Pro raw signal (digital numbers) over 2 hours after
camera switch on.

5
3.3 Effect of wind and heating on the camera
There were large fluctuations in camera DN when subjected to wind or heating treatment
(Figure 6). Using the calibration equations derived in Figure 5, the fluctuations in DN values
of the camera during the wind and heating experiment are equivalent to up to ~18°C change in
observed temperature. It was therefore difficult to determine a clear relationship between
camera temperature and DN that could be used to correct for the influence of wind and heating
on the camera. In this experiment, camera temperature is negatively related to DN, whereas the
calibration curve experiment (Figure 5) showed the opposite response.
3.4 Assessing sensor noise
To test for the effects of vignetting, the mean value of individual pixels was compared to the
image mean for all images recorded during the experiment (Figure 8). As expected, pixels
towards the edge of the sensor recorded lower than average values, while those towards the
centre recorded higher than average values. Although this effect could be attributed to uneven
heat distribution over the surface of the blackbody, a similar effect is noticeable on images
captured during UAV flight (Figure 9). The same analysis of vignetting effect was conducted
for 10 images captured during a UAV flight over a mire ecosystem at the Skogaryd Research
Station fieldsite. The lack of large, distinctive features in the mire vegetation enables it to act
as a mostly uniform surface (Figure 9a). Pixels in the lower corners of the images are darker
than those towards the top (Figure 9b).
Based on the calibration equations in Figure 5, it is estimated that a ~1°C temperature change
is observed by the camera as a change of ~25 DN (Figure 5). The results displayed in Figure
Figure 3. Blackbody calibration curves of FLIR Vue Pro 640. Calibration
curves were performed at room temperature (camera temperature = 38°C)
and in a cold incubation chamber (camera temperature = 20°C). Error bars
are standard deviation of raw camera signal but are very small (>4 DN).

6
8, show that the spatial noise across the camera sensor caused by the vignetting effect could
cause variability which is >25 DN. The results imply that the camera is accurate to 2°C.
Non-uniformity noise, which appears as a pattern of vertical or horizontal stripes is also present
on the FLIR Vue Pro sensor (Figure 10). The majority of the correlation coefficients are close
to 0, implying these noise patterns have low impact on overall image quality.
Figure 4. Effect of fan wind and lamp heating on FLIR Vue Pro 640 DN. Blue shaded areas indicate fan was switched on.
Red shaded area indicates lamp was switched on. Grey shaded area is control period with no wind or heat. No shading
(white areas) are camera stabilization periods with no wind or heat. Camera signal was stabilized for 1 hour following
each fan treatment.
Figure 8. Vignetting effect on the
FLIR Vue Pro. Individual pixel
means are compared to the image
mean. Grey pixel means fall within 1σ
of the image mean, whilst black and
white pixel means are < or > 1σ from
the image mean, respectively. Image
mean = 9167 DN, σ=8.26 DN.

7
3.5 Thermal image processing in Agisoft Photoscan Pro
Several orthomosaics were generated from test flights conducted before and after the STSM
over a mire ecosystem. The main challenge for orthomosaic construction was the low contrast
and low image quality (due to slow camera integration time causing blurry images).
Availability of flight data (telemetry data including pitch, yaw and roll) or ground-based
Figure 10. Correlation coefficients between each pixel and the centre pixel.
A B
Figure 9. Test for the vignetting effect using 10 images from a UAV flight over a mire ecosystem at the Skogaryd Research Station fieldsite.
A) Example image of the mire captured by the FLIR Vue Pro. B) Individual pixel means are compared to the image mean. Grey pixel
means fall within 1σ of the image mean, whilst black and white pixel means are < or > 1σ from the image mean, respectively.

8
geometric control points was essential for producing orthomosaics. Suggested parameters for
processing thermal imagery in Agisoft Photoscan Pro and a workflow can be found at the
following link: https://juliageographer.wordpress.com/2017/05/03/agisoft-photoscan-
workflow-for-flir-vue-pro/
4 Discussion and recommendations for camera use and UAV flight planning
The experimental results indicate that the FLIR Vue Pro 640 thermal infrared camera is
sensitive to observed temperature changes >2°C, accounting for variability across the camera
sensor. However, the accuracy of the measurements may be much lower due to the strong
dependence of camera DN on atmospheric conditions (Figures 5 and 6). Since the camera uses
an uncooled microbolometer, the temperature of the sensor will respond to changes in ambient
temperature. Fluctuations in sensor temperature have a significant impact on measurement
accuracy for two reasons. Firstly, each pixel on the array emits infrared radiation according to
the sensor temperature and receives infrared radiation emitted by the camera housing according
to its temperature. Secondly, the sensitivity of individual pixels and the relationship between
pixel voltage and signal output is dependent on the temperature of the pixel. Each pixel in the
array has a large field of view and therefore ‘sees’ a large portion of the camera interior
(Budzier and Gerlach, 2015). As a result, small changes in camera temperature can have a large
impact on the measurement. According to the manufacturer, since the FLIR Vue Pro is an
uncalibrated camera, neither of these effects are accounted for.
Theoretically, it should be possible to correct measured DN for camera temperature by
analysing the relationship between the two variables. A positive relationship between camera
temperature and measured DN would be expected since measured DN includes a large
proportion of the thermal radiation emitted by the camera interior. However, the results of the
wind and heating experiment show that there is no consistent relationship between camera
temperature and DN. It is unclear why the DN values show both large negative and positive
deviations from the control period value when the camera is either cooled or heated. Calls to
the manufacturer provided no further information on the grounds that a detailed explanation of
internal camera functioning and manufacturing would reveal proprietary information.
Given the strong temperature-dependency of uncooled, uncalibrated thermal cameras, their
ability to record stable measurements of surface thermal radiation while flying on a UAV will
be limited. It is therefore strongly recommended to purchase a radiometrically calibrated
camera which will include a mechanism or algorithm to account for the temperature-
dependency of the sensor. Nevertheless, the accuracy of these cameras is still fairly low (± 5°C
for the FLIR Vue Pro R) and the sensitivity and offset of individual sensor pixels which varies
according to sensor temperature may not be corrected for (Ribeiro-Gomes, et al., 2017).
Therefore the following best practices are recommended to minimize the effects of changing
atmospheric conditions during UAV flight on the camera:
• Turn on camera at least 15mins before take-off to allow camera startup sequence and a
stable operating temperature to be reached (Berni, et al., 2009; Gómez-Candón, et al.,
2016)
• Add extra flight lines before the start of measurements to allow camera to acclimatize
to ambient temperature, wind and solar radiation conditions while flying
• Shelter camera when on UAV, either by placing the camera in the body of a fixed wing
UAV or by building a small shelter when the camera is flying on a quadcopter

9
• Fly slowly to reduce the cooling effect of wind on the camera and to allow collection
of high quality, non-blurry images
• Temperature calibration in the field is essential for uncalibrated cameras in order to
convert DN to surface temperature but also provides validation data for radiometrically
calibrated cameras.
Field calibration can be achieved by measuring ground targets with an IR radiometer, a second
IR camera or thermocouples (Berni, et al., 2009; Jensen, et al., 2013, Gómez-Candón, et al.,
2016). Ideally, ground target temperature measurements should be made during a UAV flight
or as soon as possible before or after the flight. Temperature calibration or validation should
be performed separately for each UAV flight since atmospheric conditions and camera
temperature will likely change between each flight. By measuring ground targets with a wide
range of temperatures, a simple empirical line calibration can be performed. Calculating a
direct relationship between DN and ground target surface temperature omits the need to
measure and account for the proportion of measured DN that comes from radiation emitted by
the camera interior. It also accounts for changes in atmospheric conditions (air temperature,
humidity, solar radiation) which affect the relationship between at-sensor measured radiance
and surface temperature (Berni, et al., 2009; Hammerle, et al., 2017). Ground targets should be
large enough to cover several thermal camera pixels so that they can be easily located on the
images and have a high emissivity.
The analysis of sensor noise revealed a significant vignetting effect and minimal ‘stripy’ noise
patterns across the sensor. The stripes are caused by non-uniformity noise patterns whereby
individual pixels behave differently as a result of slight differences during the manufacturing
process and degradation of the sensor over time. Most thermal cameras including the FLIR
Vue Pro perform automatic non-uniformity or flat-field corrections as the non-uniformity noise
can be relatively large compared to the desired infrared radiation signal (Budzier, et al., 2015).
During the flat-field correction the shutter is closed, presenting an isothermal surface to the
sensor and thus the offset coefficients of each pixel can be adjusted. In radiometrically
calibrated cameras, the NUC can also be used to account for internal camera temperature
fluctuations with the assumption that the sensor temperature is the same temperature as the rest
of the camera interior. The correction appears to be working well in the FLIR Vue Pro as only
minimal non-uniformity noise patterns are visible across the sensor and these are generally not
visible on individual images taken by the camera. Although the vignetting effect remains
significant, it is usually compensated for when images are stitched together in photogrammetry
software.
Orthomosaic creation from thermal images is generally more challenging than when using
optical data (Ribeiro-Gomes, et al., 2017). Thermal imagery can have low contrast when
measuring areas with small variations in surface temperature since they are often designed to
measure very large temperature ranges (for example, -40°C to 550°C for the FLIR Vue Pro R).
As a result, a lower number of tie points are identified in UAV image stitching software causing
some images to be omitted from the orthomosaic, high uncertainty in the georeferencing
process and introduction of stitching artefacts into the final orthomosaic. Furthermore, the
slow integration time of the camera often causes blurry images to be captured during flight. To
minimize these issues, several recommendations for flight campaign design are outlined below:
Fly slowly to reduce occurrence of blurry images and extend flight lines beyond
measurement area so that images taken during UAV turns can be omitted from the
orthomosaic

10
Ensure a high front- and sidelap between images (ideally >80% in both directions) so
that there is plenty of redundancy and the lowest quality images can be omitted from
the orthomosaic
Use a gimbal or other solution to minimize vibration of the camera
Conduct several flights over the same area at different angles to minimize the effects of
bi-directional reflectance and increase the image density to increase the quality of the
final orthomosaic
References
Aubrecht, D. M.; Helliker, B. R.; Goulden, M. L.; Roberts, D. A.; Still, C. J. & Richardson, A.
D. Continuous, long-term, high-frequency thermal imaging of vegetation: Uncertainties and
recommended best practices. Agricultural and Forest Meteorology, 2016, 228–229, 315 - 326
Berni, J. A. J; Zarco-Tejada, P. J.; Suárez, L. & Fereres, E. Thermal and Narrowband
Multispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle.
IEEE Transactions on Geoscience and Remote Sensing, 2009, 47, 722-738.
Budzier, H. & Gerlach, G. Calibration of uncooled thermal infrared cameras. Journal of
Sensors and Sensor Systems, 2015, 4,187-197.
Gómez-Candón, D.; Virlet, N.; Labbé, S.; Jolivot, A. & Regnard, J-L. Field phenotyping
of water stress at tree scale by UAV-sensed imagery: new insights for thermal acquisition
and calibration. Precision Agriculture, 2016, 17, 786-800.
Goodall, T. R.; Bovik, A. C. & Paulter, N. G. Tasking on Natural Statistics of Infrared Images.
IEEE Transactions on Image Processing, 2016, 25, 65-79
Hammerle, A.; Meier, F.; Heinl, M.; Egger, A. & Leitinger, G. Implications of atmospheric
conditions for analysis of temperature variability derived from landscape-scale thermography.
International Journal of Biometeorology, 2017, 61, 575-588.
Jensen, A. M.; McKee, M., & Chen, Y. Calibrating thermal imagery from an unmanned aerial
system – AggieAir. IEEE International Geoscience and Remote Sensing Symposium - IGARSS,
Melbourne, VIC, 2013, 542-545.
Meier, F.; Scherer, D.; Richters, J. & Christen, A. Atmospheric correction of thermal-infrared
imagery of the 3-D urban environment acquired in oblique viewing geometry. Atmospheric
Measurement Techniques, 2011, 4, 909-922
Ribeiro-Gomes, K.; Hernández-López, D.; Ortega, J. F.; Ballesteros, R.; Poblete, T. &
Moreno, M., A. Uncooled Thermal Camera Calibration and Optimization of the
Photogrammetry Process for UAV Applications in Agriculture. Sensors, 2017, 17, 2173.
Stark, B.; Smith, B. & Chen, Y. Survey of Thermal Infrared Remote Sensing for Unmanned
Aerial Systems. International Conference on Unmanned Aircraft Systems (ICUAS), Orlando,
FL, 2014, 1294-1299