Embed Size (px)
Citation preview

ATMOSPHERIC SCIENCE LETTERSAtmos. Sci. Let. 6: 31–34 (2005)Published online in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/asl.87
Radar rainfall estimation in the New Zealand contextWarren Gray1* and Howard Larsen2
1Radar Meteorologist, NIWA, New Zealand2Ministry for the Environment, New Zealand
*Correspondence to:Warren Gray, RadarMeteorologist, NIWA, PO Box14901, Kilbirnie, Wellington,New Zealand.E-mail: [email protected]
Received: 10 June 2004Revised: 8 December 2004Accepted: 8 December 2004
AbstractDifficulties commonly encountered in precipitation measurement by radar include errorsfrom radar reflections from the surface, errors in extrapolating from measurements aloft,and errors through inadequately sampling a fluctuating signal. These error sources arediscussed, along with the skill of the solutions that have been implemented. Copyright 2005 Royal Meteorological Society
Keywords: radar rainfall estimation; clutter rejection; vertical profile correction; hydro-logical models; river flow
1. Introduction
Rainfall is highly variable in both space and time. Dur-ing a storm, rainfall may vary by tens of millimetresper hour from minute to minute and over distances ofonly a few tens of metres (Austin et al., 2002). Addi-tionally, New Zealand’s rugged terrain gives rise toorographic effects, which can lead to changes in meanrainfall rate by a factor of 10 (Gray and Austin, 1993).These factors make estimates of catchment-scale rain-fall difficult to obtain, as traditional individual raingauge measurements are generally representative ofonly a small local area and the dense network of suchgauges required for even moderately representativemeasurements is impractical. Without catchment-scaleestimates, forecasts of soil moisture and of stream andriver flow are subjected to large uncertainties. Whileradar can fill the need for high-resolution, real-time,centralised sampling of the precipitation, it estimatesthe rainfall rate at the ground only indirectly, and thisbrings with it other problems (Austin, 1987).
This article describes our solutions to three problemsin using radar reflectivity aloft to estimate rainfallat the surface. We describe new approaches to seaclutter and vertical profile corrections, and look atthe impact of sample-to-sample variability. The resultsof comparisons of catchment-averaged radar estimates(after correcting for known errors) against an 8-gaugeaverage are given and show reasonable skill. Measuredriver flow is also compared with the output froma distributed hydrological model using the correctedradar data as input.
2. Clutter rejection
We find clutter, particularly sea clutter, can usuallybe recognised by its decrease of intensity with heightand have developed algorithms to reject clutter by
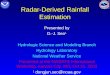
comparing the observations made at low altitudes bythe two lowest elevation beams. Figure 1 shows acontour plot of the frequency of reflectivity samplesas seen in beam 1 (0.5◦) and beam 3 (1.3◦) duringone particular scan cycle. Three major echo groupingsare apparent in this figure. One lies in the lower lefthand corner, with low reflectivities in both beams 1and 3, but with somewhat stronger echoes in beam1 — this group contains echoes from sea clutter. Thesecond grouping lies just below the 1 : 1 line, withstrong echoes in both beam 1 and 3 — this group israin. The third group of higher frequencies in the topright hand corner (beam 1 around 27 dBZ, beam 3around 16 dBZ) is an area of clutter associated withan offshore island. Removing signals from a pixel thatis simultaneously below a threshold of 7 dBZ in beam1 and 4 dBZ in beam 3 effectively removes the seaclutter without removing significant rain. Because theecho is stationary, the sea clutter can cause difficultiesto nowcasting algorithms with significant fraction ofthe echoes not moving. Also, in strong winds, seaclutter can produce reflectivities equivalent to rainrates of around 1 mm h−1, affecting the estimates ofrainfall accumulation.
3. Vertical profile extrapolation
While the radar can give low-level reflectivity infor-mation near the radar, the rise in beam height withrange means that even at the lowest scan angle thebeam is well above the surface at longer ranges. Weuse algorithms that estimate the horizontally aver-aged vertical structure of reflectivity from volume scaninformation near the radar, and apply it at long rangesto estimate surface reflectivity from higher-level data.We do this by first averaging the reflectivity in azimutharound each range ring, for each elevation, out to arange of 120 km. A simple function is then fitted to
Copyright 2005 Royal Meteorological Society

32 W. Gray and H. Larsen
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29
1
3
5
7
9
11
13
15
17
95-100
90-95
85-90
80-85
75-80
70-75
65-70
60-65
55-60
50-55
45-50
40-45
35-40
30-35
25-30
20-25
15-20
Sea Clutter
Rain
Island1:1 line
BE
AM
3 (
1.3°
) R
EF
LEC
TIV
ITY
(D
BZ
)
BEAM 1 (0.5°) REFLECTIVITY (DBZ)
19
Figure 1. Joint frequency plot of the number of samples seen in the Auckland radar image of 1400 UTC on 7 October 1999, withreflectivity as measured by beam 1 (0.5◦) and beam 3 (1.3◦)
these samples, a linear decrease of reflectivity withheight, plus a ‘box’ to represent the bright band. Theheight of the bright band is found by moving the box inthe vertical until the best fit is obtained (see Gray et al.,2002, Sansom et al., 2001 for details). The fitting pro-cess involves scaling the reflectivities from each setof elevations at a range bin to a common value for aninterpolated height, and the fitting process also allowsfor the spreading of the radar beam with range.
We have optimised the vertical profile extrapolationprocedure by first classifying each vertical column ofshort-range data into one of several ‘precipitation type’classes. Experience with data obtained over severalyears and many storms indicates that in nearly allcases the most efficient classification is obtained ifjust two classes are used. One of these is characterisedas shallow with little or no bright band; the other issignificantly deeper and has a noticeable bright band.Corrections to the deeper rainfall based solely on theshallower structure result in significant overestimationof the surface rainfall rate. A correction algorithm hasbeen developed that separates the rainfall into twoclasses, based on the interpolated reflectivity limit of12 dBZ at 3.5 km and fits these classes separately. Thechoice of which class is used for correcting the longer-range data is based on the intensity of the reflectivityobserved as a function of its height. Figure 2 showsthe vertical profiles before and after correction.
4. Sampling variability
There is an inherent fluctuation in the measuredvalue of radar reflectivity from a particular volumeof precipitation, which introduces an uncertainty to
the estimated precipitation rate. To obtain a usefulmeasure of the precipitation intensity, a number ofindependent measurements of the reflectivity mustbe combined. For the Ericsson radar data used inthis study, this is achieved by averaging the returnedsignal from 6 transmitted pulses at each range andthen averaging the measurements from 6 adjacentranges, so combining 36 measurements. Even afterthis averaging, there is significant, apparently randomnoise in the data, which degrades the usefulnessof the data for hydrological and other applications.This variability has been investigated to determine itscharacteristics.
As a first step to investigate the variability of reflec-tivity estimates, data from successive scans over thesame point and close in elevation were compared. Datawere restricted to those taken over the sea at timeswith no evidence of sea clutter, to avoid both groundand sea clutter. Beam 1 (elevation 0.5◦) and beam2 (elevation 0.9◦) data were used since the observa-tion volumes overlap more than 50%. The beam 2data were sampled 10 s after the beam 1 data dur-ing the normal scanning cycle. Data pairs were furtherrestricted to those in which the beam 1 height wasbelow 500 m, to avoid any bright band effects, andwith beam 1 reflectivity between 24 and 25 dBZ toavoid intensity-related effects.
Figure 3 shows the distribution of beam 2 reflectiv-ity selected in this way for one case of widespreadrainfall offshore from the Auckland radar. It showsthat the observations vary from 17.5 to 32.5 dBZ,with a standard deviation of 1.9 dBZ. A reflectivityof 17.5 dBZ corresponds approximately to a rain rateof 0.4 mm h−1, 32.5 dBZ to 3 mm h−1, so the rangeof possible error is large.
Copyright 2005 Royal Meteorological Society Atmos. Sci. Let. 6: 31–34 (2005)

Radar rainfall estimation in NZ 33
50.0
50.0
45.0
40.0
40.0
45.0
35.0
35.0
30.0
30.0
25.0
25.0
20.0
20.0
15.0
15.0
10.0
10.0
5.0
5.00.0
0.0
HE
IGH
T
REFL
50.0
50.0
45.0
40.0
40.0
45.0
35.0
35.0
30.0
30.0
25.0
25.0
20.0
20.0
15.0
15.0
10.0
10.0
5.0
5.00.0
0.0
HE
IGH
T
REFL
(a) (b)
Figure 2. The vertical profile of reflectivity for 0700 UTC on 1 June 1999. Shown here is the reflectivity (dBZ) as a function ofheight (100’s m), with echoes separated into two classes, based on the interpolation of the 10-beam data at a height of 3.5 km.(a) The profiles before correction, (b) the profiles after correction. Included in (a) is a schematic of the simple functions used forprofile fitting
Figure 3. The distribution of reflectivity in beam 2 observationsimmediately above selected beam 1 observations, for one caseof widespread rainfall offshore from the Auckland radar, at1600 h on 07 October 1999. The beam 1 observations werethose below 500 m with a reflectivity between 24 and 25 dBZ
The reflectivity fluctuations were modelled by Mar-shall and Hitschfeld (1953), with a companion arti-cle by Wallace (1953) providing mathematical sup-port. They derived expressions for (among others)the probability density functions of the radar-receivedreflectivity. The radar data used here come from areceiver with logarithmic signal processing, for whichthe relationships are
P = 0.56P and, σP = 1.28P/√
k
where P is the average power of the true reflectivity,P is the expected measured power, σP is the standarddeviation of this estimate, and k the number ofindependent samples (Sauvageot, 1991).
At a mean received power of 24 dBZ, the standarddeviation is expected to be 1.2 dBZ.
The early modelling work assumed the precipita-tion within the volume observed by the radar washomogeneous and uniform. Rogers (1971) developedthe theory to account for non-uniform precipitationwithin the scattering volume. He found that the meansignal level is reduced and the standard deviation sig-nificantly increased, when there are inhomogeneitieswithin the sampling volume. When there is a lin-ear gradient of 20 dB/km across the volume (a notunlikely gradient in some cases), there is an underesti-mate of the reflectivity by 3 dB and an increase in thestandard deviation of the signal fluctuations of 5.7 dB.Such results would more than explain the observationsreported above.
This residual variability in the radar rainfall esti-mates has the consequence that high-resolution rainfallestimates (e.g. 1 image, 1-km resolution) are unlikelyto be accurate. Averaging in time and space will benecessary for any application requiring rain rate esti-mates within a factor of 2. For example, averagingonto a 3 by 3 km area will reduce much of the vari-ability, so that estimates with a standard deviationof 1 dBZ could be possible. This resolution may beinsufficient for some applications, e.g. real-time con-trol of urban storm water.
Copyright 2005 Royal Meteorological Society Atmos. Sci. Let. 6: 31–34 (2005)

34 W. Gray and H. Larsen
0.5
0.4
0.3
0.2
0.1
015 20 25 30
time (hours)
gaugeradar
21
14
12
10
8
6
4
2
012 13 14 15 16 17 18 19 20
time (hours)
Cat
chm
ent a
vg r
ain
rate
(mm
.hr-1
)
gaugeradar
Cat
chm
ent a
vg r
ain
rate
(mm
.hr-1
)
gaugeradar
4.54
0.50
3.53
2.52
1.51
0 2 4 6 8 10 12 14time (hours)
01 may 99 01 jun 99 08 oct 99
Figure 4. Comparison of catchment-averaged rainfall as seen by the radar (solid) and rain gauge (dashed), for the three storms: 1May 1999, 1 June 1999 and 8 October 1999
102
101
100
10-1
10-2
Flo
ws
(m3 /s
)
12.00Oct-06
00.00Oct-07
12.00Oct-07
00.00Oct-08
12.00Oct-08
00.00Oct-09
12.00Oct-09
Figure 5. Comparison of river flow as measured by flowgauges (heavy) or estimated using radar rainfall estimates asinput into the TOPNET hydrological model (light) for two sitesin the catchment
5. Catchment comparisons
Comparison of the radar rainfall estimates, averagedover the Mahurangi catchment, with the average of thedata from the 8 gauges in the catchment shows thatthe radar was making good estimates of the surfacerainfall rate (Figure 4).
Comparison of the flow, as estimated by the hydro-logical model using radar data as input, shows similarskill when verified against stream flow data. The fullydistributed hydrological model, TOPNET (Ibbitt et al.,2001), divides the catchment up into hydrologicallyhomogeneous areas, and the radar data are used toassign a rainfall over each of these areas. Becauseradar data is formed from areal averages, it is a goodsource of rainfall information for this type of model.
Figure 5 shows the stream flow measured by flowgauges at two locations within the Mahurangi catch-ment and the estimate of the flow at these locationsmade by the hydrological model using the distributedradar data as input.
6. Conclusion
If radar is to be used to make accurate estimates ofthe surface rainfall, the corrections must be made for
the errors resulting from clutter and the vertical profile(VPR) effects. There is also a need to consider the vari-ability that results from sampling a fluctuating signal.When the corrections are applied, and the estimatesaveraged onto catchment scales, results here suggestthat rainfall estimates by the radar are comparable tothose of a high-density rain gauge network.
Acknowledgements
The authors would like to thank MetService (NZ) Ltd. forsupplying the radar data, Dr Ross Woods (NIWA) for the hydro-logical model and The Foundation for Research, Science andTechnology for funding this research (Contract CO1X0014).
References
Austin PM. 1987. Relationship between measured radar reflectivity andsurface rainfall. Monthly Weather Review 115: 1053–1071.
Austin GL, Nicol J, Smith K, Peace A, Stow D. 2002. The space timevariability of rainfall patterns: implications for measurement andprediction. Western Pacific Geophysics Meeting. AGU: Wellington;paper no. H42A-02, wp35.
Gray WR, Austin GL. 1993. Rainfall estimation by radar for the Otakicatchment: The OPERA pilot study. Journal of Hydrology 31(1):91–110.
Gray WR, Uddstrom MJ, Larsen HR. 2002. Radar surface rainfallestimates using a typical shape function approach to correct for thevariations in the vertical profile of reflectivity. International Journalof Remote Sensing 23: 2489–2504.
Ibbitt RP, Henderson RD, Copeland J, Wratt DS. 2001. Simulatingmountain runoff with meso-scale weather model rainfall estimates:a New Zealand experience. Journal of Hydrology 239: 19–32.
Marshall JS, Hitschfeld W. 1953. Interpretation of fluctuating echofrom randomly distributed scatterers. Part II. Canadian Journal ofPhysics 31: 962–994.
Rogers R. 1971. The effect of variable target reflectivity on weatherradar measurements. Quarterly Journal of the Royal MeteorologicalSociety 97: 154–167.
Sansom J, Thompson CS, Gray WR. 2001. Extraction of breakpointsfrom radar-estimated rainfall fields. Meteorological Applications8(2): June 2001; 137–152.
Sauvageot H. 1991. Radar Meteorology. Artech House: Boston.Wallace PR. 1953. Interpretation of fluctuating echo from randomly
distributed scatterers. Part II. Canadian Journal of Physics 31:995–1009.
Copyright 2005 Royal Meteorological Society Atmos. Sci. Let. 6: 31–34 (2005)


















![Narayan Shrestha [Radar based rainfall estimation for river catchment modelling]](https://img.dokumen.tips/doc/110x75/554a3921b4c90582328b49a3/narayan-shrestha-radar-based-rainfall-estimation-for-river-catchment-modelling.jpg)