Embed Size (px)
Citation preview
I
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
'SIMULADOR PARA MEDICIÓN DEL NIVEL DE LÍQUIDOS"
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERÍA EN LA
ESPECIALIZACION ELECTRÓNICA Y CONTROL
Freddy Guillermo Salgado Pro
Quito, octubre, 1987 r oosi i) 9

AGRADECIMIENTO
pon.
apoyo.
pon.
ayi/r/n en -La. dLn.e.CjCJjón. de. Án. pn.e¿en£e,
A todfLó aque^ioA pesiAonfL* que. de. una. fjosuna. LL
han ca-Labo/iado en ¿a cLLhjtinacJjón de, &¿t.e. &uab<L—
DEDICATORIA
A niL* padsiesi po/L e/
nien¿o apoyjo b/Lindado
te. toda. mL vida.

CERTIFICACIÓN
q¿¿e.
ha.
po/L QÁ. S/L.
Sa¿gjado
sien.—
m.
// /ry A

ÍNDICE
INTRODUCCIÓN viii
CAPITULO I : CONCEPTOS FUNDAMENTALES
1.1 CONCEPTOS RELATIVOS A FLUIDOS LÍQUIDOS 2
1.1.1 Propiedades generales - 2
1.1.2 Conceptos básicos 3
1.2 CONCEPTOS GENERALES CONCERNIENTES A TRANSDUCTORES 9
1.2.1 Definición de transductor- 9
1.2.2 Principios de transducción 9
1.2.3 Características generales 10
1.3 TRANSDUCTORES DE NIVEL DE LÍQUIDOS 14
1.3.1 Transductor de flotación 14
1.3.2 Trans ductor de presión (16)
1.3.3 Transductor resistivo 20
1.3.4 Trans ductor conductivo 22}
1.3.5 Transductor capacitivo 26
CAPITULO II : MÉTODOS DE DETECCIÓN DE NIVEL DE LÍQUIDOS
2.1 CLASIFICACIÓN DE LOS MÉTODOS 31
2.2 DESCRIPCIÓN DE LOS MÉTODOS PRINCIPALES 32
2.2.1 Métodos directos 32
2.2.2 Métodos indirectos 36
2.3 ANÁLISIS COMPARATIVO DE LOS MÉTODOS 46

VI
Pag.
CAPITULO III : DISEÑO DEL SIMULADOR DE NIVEL DE LÍQUIDOS
3.1 * DIAGRAMA DE BLOQUES GENERAL 48
3.2 DISEÑO DE TRANSDUCTORES 49
3.3 DISEÑO DEL TRANSDUCTOR CAPACITIVO 52
3.3.1 Cálculo de capacitancia total 54
3.3.2 Resultados obtenidos 55
3.3.3 Circuitos de acopie y medición 55
3.3.4 Circuitos monoestables 55
3.3.5 Circuito combinacional 51
3.3.6 Oscilador 51
3.3.7 Circuito de sincronización 52
3.3.8 Indicador análogo 52
3.3.9 Indicador de estado de nivel 55
3.4 DISEÑO DEL TRANSDUCTOR RESISTIVO- 68
3.4.1 Resultadosobtenidos 53
3.4.2 Circuitos de acople y medición 53
3.4.3 Puente de Wheatstone • 71
3.4.4 Amplificador diferencial 72
3.4.5- Conversor V/F, circuitos de muestreo y sincronización 74.
3.4.6 Indicador análogo. 77
3.5 DISEÑO DEL TRANSDUCTOR CONDUCTIVO 80
3.5.1 Circuitos de acople 80
3.5.2 oscilador y filtro 82
3.5.3 Detector de caída de voltaje 82
3.5.4 Circuito amplificador 85
3.6 DISEÑO DEL TRANSDUCTOR DE PRESIÓN ' 85
3.6.1 Características del interruptor de presión 88

Vil
Pag.
3.7 DISEÑO DEL CONMUTADOR FLOTANTE
3.8 DISEÑO DE LA FUENTE DE PODER
3.9 DISEÑO DEL CONTROL DE BOMBAS
91
91
99
CAPITULO IV: PRUEBAS Y ANÁLISIS DE RESULTADOS
4.1 ANÁLISIS TÉCNICO ECONÓMICO DEL SIMULADOR CONSTRUIDO
4.2 DESCRIPCIÓN DE LAS PRUEBAS REALIZADAS Y ANÁLISIS DE
RESULTADOS
104
105
4.2.1 Pruebas transductor capacitivo
4.2.2 Pruebas transductor resistivo
4.2.3 Pruebas transductor de presión
4.2.4 Pruebas transductor conductivo
4.2.5 Pruebas conmutador flotante
105
112
117
119
121
4.3 CONCLUSIONES 124
BIBLIOGRAFÍA
REFERENCIAS BIBLIOGRÁFICAS
ANEXOS
128
129
ANEXO A : Manual de uso y mantenimiento 132
ANEXO B : Diagramas circuitales, diagramas del equipo de
pruebas demostrativo 142
ANEXO C : Lista de elementos 152
ANEXO D : Guía de fuentes reguladas 157
ANEXO E : Programación EPROM 169
ANEXO F : Características físicas de varios líquidos 174

INTRODUCCIÓN
<£¿ p/ie^ente. tn.aba¿.o f-o/wa pasite, deJ~ p/ioue.cto CQNUEJP 85-06,
caa¿ e^ótá en.cainin.ado a ¿a isLVQAtLaacLón de. va^Labte^ a riLv&L ¿
c^ta tesóLt ed un 4ub-p/ioy,e,cto que. estudia -La vasíLabte.
do, JJLquJjdod" en f.o/ima te.ó/ú-ca-p/iáctLca.
Con eJ, fJsi de. ^Ijnwicui, de¿e.ctaA o m.e.dui eÁ nive^L de.
¿e. ka cjoriA&iiiLdo un e.qiiLpo de. p/iue.ba<ó demod&icutLvo , &¿ cuaL IncJ.uu.e.
frianádacJio/Lesó de. nLveJ~ Q^LementcuLe^ de. VCULLO^ tLpo^, como 4on: capacJjtL-
vo , de. /le^L^^tencla vcuiLab^e., p/ie^-Lón, conmwtadofi fJ^otante. y. conductivo;
que. jionman pcuite. de. machos p/ioce^o^ LnduA&LLcuLe^ y.
pueden encontM.a^óe, en astst<zf.acto*4 de. LLÓO
£*L equipo de. p/iu.e.ba^ donio^&LcutLvo e^> deJ, £Lpo compacto;
de.cÍA.3 no ne.ce^¿^ta • de. e.qi¿Lpo4 pejú,f.é^iLco^ adido na¿e^ó .
de. móduLo-ó ¿e.pa/iab'L&A que. ¿e. ¿ntex.cone.c£an en&ie. ¿L.
dotado de. fjuente^ de. alimentación p/iopLa, m.e.dLdo/ie^> deJ. tLpo ancLLoao
y. dLgÁJiaL, un ¿Ldtejna de. bombe,o de. JJ^quLdo , com,pan.ado/ie¿> de. nive^L,
etc. £n /Le^unen eÁ. e.qiLÍpo ofae.ce. un me-dio didáctico po/i me.dio
cua¿ ¿e. puede. expesúmentasL y, anaLL^.an ¿a va^Lab^Le. tratada.
&L p/ie^ente. tsiaba^o e.x.pone. en eA de^a^io^Lio de. 4U4 capLtu-LoA,
-Lo
CAfJTULD 3 : &xpone. conceptos f-undam,entate¿> /ieJ,at^vo^ a fJ.uÁ.do-4 y.
só. Da una vJUsLón aenesLoLLg-ada de. dL^tlnto^ó tLpo¿ de. taanóducto-
de. nLveJ-, ¿UA caA-acte/UL^tLca^ y, ap2¿cac¿onesi .
CAPJTULD 3Ü : 8-óte. capLtuLo expone. -ÍQA d¿f.e^.ente^ métodos de. ¿entasi ¿a -viii

IX
nLveJ. do. JJLquJjdo , ¿ e. hace, un comentario comparativo do.
y,
CAVTTULQ 333: 6-ótd de.dlca.do aL di^eflo ¿¿ ¿¿¿¿¿i/Licación de.
eÁ.é.c&LÍco4 y, me.cáfiLco-6 isivo-lucsiado^ en. -¿a corM&iaccLórL deJ.
Do, ¿CLÓ p/iLLe.bcLó y. objetivaciones!, de. cada ^t/ianódu.cto/L} ¿iviae. 2.a ciuiva
coA.ac£esL¿>ótLca, ¿a que, e¿ -La pLe.dA.a angu-loA. en &¿ diseño de.
de. acopio., m.e.dLción ¿¿ corutnoÁ. de,
CAVJTULQ 3V : c-4¿.á de^^tinado a p/iu&bad y, anáÁJ^Ló de. /te^u^tado^ obtenL-
, O4-L como concJM^-ione^ y, A.e.comen.dacLone¿ .
(S¿ &Laba¿,Q ¿nc-iuue. en <ÓÍL pastee, anexa, un rcianjuaL de. LLAO ¿¿
m.arutenJjfiLen^to , pl.ano¿ QsLé.c&iLco4 ¿¿ {R&cdnLco^ } como ¿.ambLén una
de,

CAPITULO I
"CONCEPTOS FUNDAMENTALES"

CAPITULO I
CONCEPTOS FUNDAMENTALES
1.1 CONCEPTOS RELATIVOS A FLUIDOS LÍQUIDOS
1.1.1 PROPIEDADES GENERALES
Un fluido se define como una substancia capaz de fluir, puede
ser un gas o un líquido, se diferencian entre sí en la compresibilidad.
Un líquido es prácticamente incompresible en comparación a un gas,
esto es, su volumen varía de manera insignificante al estar sometido
a una presión.
Al hablar de líquidos estamos refiriéndonos a un estado de
la materia en el cual las moléculas se encuentran relativamente libres
para cambiar sus posiciones unas con otras, pero restringidas por
las fuerzas de cohesión para mantener un volumen relativamente fijo.
Los líquidos son fluidos cuya masa toma la forma del recipiente
que los contiene, su volumen en cambio se define independientemente
del recipiente.
El proceso de difusión entre líquidos es lento en comparación
al de los gases. La difusión se debe a la energía cinética de las
moléculas, la que les permite moverse de un punto a otro. En el caso
-2-

-3-
de líquidos la movilidad de las moléculas se ve afectada por los choques
continuos, lo que ocasiona pérdidas de energía.
Los líquidos se evaporan en recipientes abiertos. Las moléculas
en un líquido se hallan unidas por fuerzas atractivas, debido a choques
intermoleculares algunas de las moléculas ganan energía y logran pasar
a la fase gaseosa. Al producirse el escape de moléculas, la energía
cinética promedio de un líquido baja, y por tal motivo la temperatura
de la fase desciende. Cuando los líquidos se hallan en recipientes
cerrados, se evaporan hasta que la presión de las moléculas de gas
igualen a las del líquido. .La presión de equilibrio depende de la
naturaleza del líquido y su temperatura.
1.1.2 CONCEPTOS BÁSICOS
a) Densidad: Se define como la relación de la masa para la unidad
de volumen, esto es:
P = m/v (1.1)
b) Peso específico: Se define como la relaciOn de peso por unidad de
volumen, esto es:
P = w/V = mg/V = p.g (1.2)
c) ' Densidad relativa: La densidad relativa de una substancia es la -
relación de su densidad a la densidad del agua, esto es:
Pr. = P/(P H2Q) (1.3)
d) Presión de un fluido: Se define como la razón de la fuerza
normal dF, ejercida sobre una pequeña superficie dA, al área dA, esto es:
P = dF/dA • (1.4)
Si la presión es la misma en todos los puentes de una superficie
plana finita de área A, se tiene:
P = F/A (1-5)
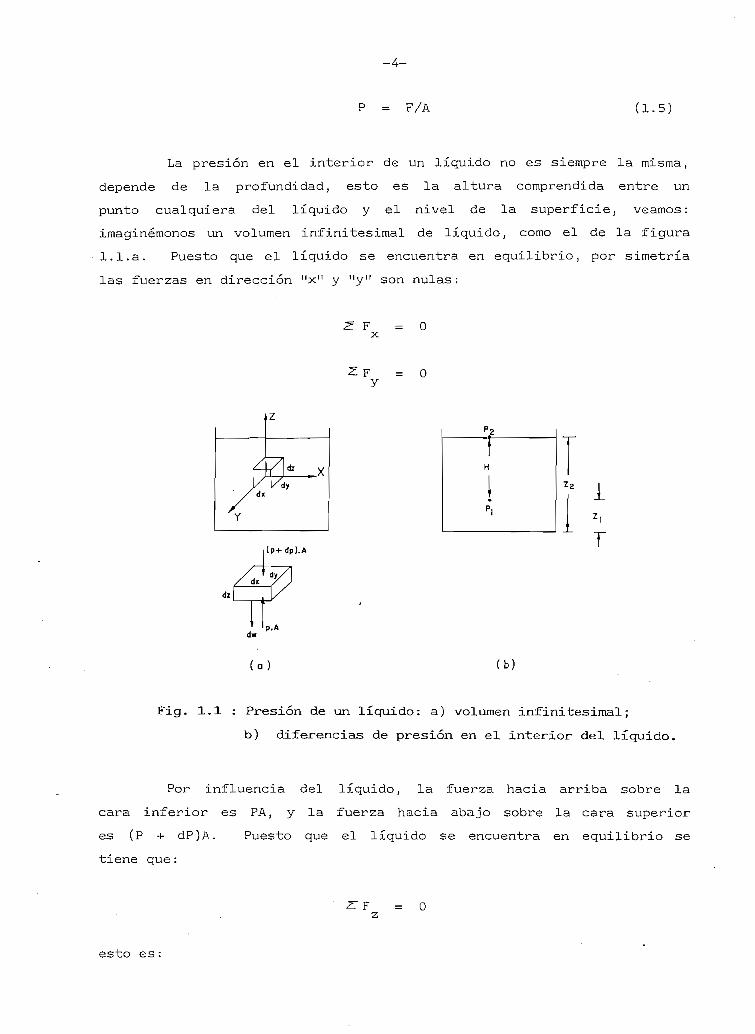
La presión en el interior de un líquido no es siempre la misma,
depende de la profundidad, esto es la altura comprendida entre un
punto cualquiera del líquido y el nivel de la superficie, veamos:
imaginémonos un volumen infinitesimal de líquido, como el de la figura
1.1.a. Puesto que el líquido se encuentra en equilibrio, por simetría
las fuerzas en dirección "x" y "y" son nulas:
F = Ox
y = o
dx 1
T
b)
Fig. 1.1 : Presión de un líquido: a) volumen infinitesimal;
b) diferencias de presión en el interior del líquido.
Por influencia del líquido, la fuerza hacia arriba sobre la
cara inferior es PA, y la fuerza hacia abajo sobre la cara superior
es (P -i- dP)A. Puesto que el líquido se encuentra en equilibrio se
tiene que:
= O
esto es:
-5-
P A - ( P + d P ) A ~ d W = 0 (1.6)
donde dW es el peso del volumen infinitesimal, y puesto que:
W = mg = pgV
dW = pgAdz (1.7)
Reemplazando la ec. (1.7) en la ec - (1-6) y despejando se
obtiene:
dP/dz = - p g (1.8)
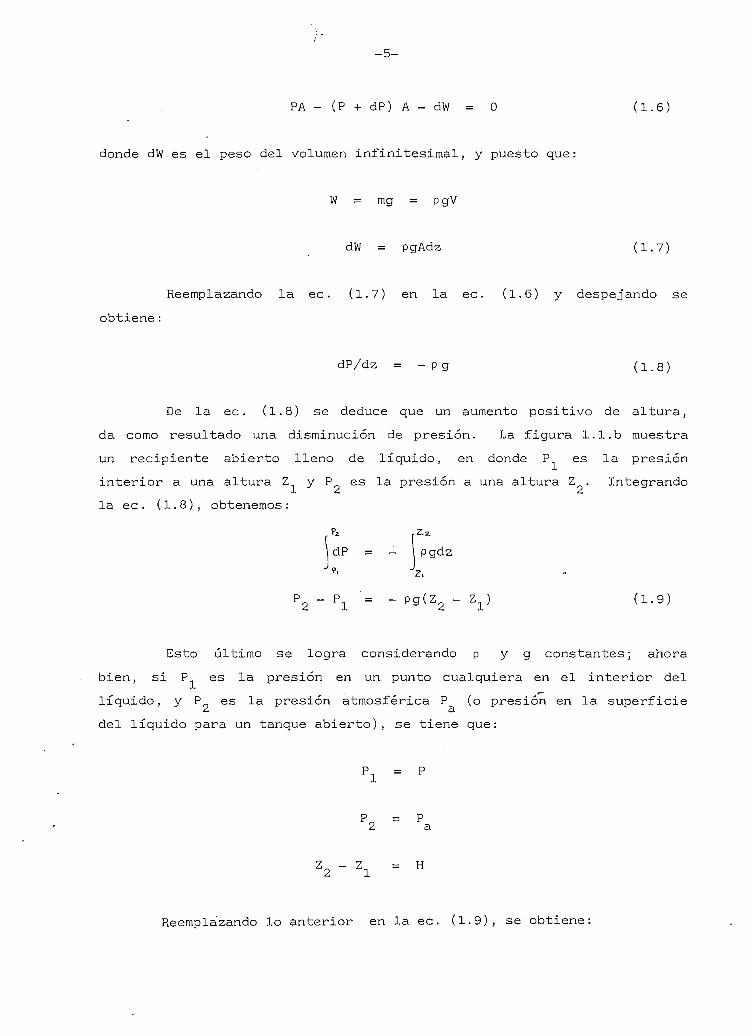
De la ec. (1.8) se deduce que un aumento positivo de altura,
da como resultado una disminución de presión. La figura 1.1.b muestra
un recipiente abierto lleno de líquido, en donde P es la presión
interior a una altura Z y P es la presión a una altura Z . Integrando
la ec. (1.8), obtenemos:
dP = - I pgdz
"= - pg(22 - z (1.9)
Esto último se logra considerando P y g constantes; ahora
bien, si P es la presión en un. punto cualquiera en el interior del
líquido, y P es la presión atmosférica P (o presión en la superficie¿ a
del líquido para un tanque abierto), se tiene que:
pi = p
Pn = P2 a
2 2 ~
Reemplazando lo anterior en la ec. (1.9), se obtiene:

donde:
-6-
- P = - P gH
p __ P + P gHa (1.10)
En resumen, la ec. (1.10) indica que la presión en el interior
de un líquido de densidad P depende exclusivamente de la altura H
a la superficie.
Si al recipiente lo cerramos y al líquido lo sometemos a una
presión P' entonces la fórmula general está dada por:
P = -i- p gH (1.11)
La ec. (1.11) pone de manifiesto que la presión es la misma
para todos los puntos a la misma profundidad. Según el principio
de Pascal: toda presión P' aplicada a un fluido confinado en un reci-
piente cerrado se transmite sin reducción a todos los puntos del fluido
y las paredes del depósito que las contiene, en otras palabras un
cambio de presión ¿P' en la superficie del líquido produce una variación
de presión AP en todos los puntos del líquido, esto es si consideramos
a un líquido como incompresible.
e) Tensión superficial: Se ha demostrado experimentalmente,
como lo muestra la fig. 1.2, que la extracción de un anillo de longitud
L fuera de un líquido requiere una fuerza adicional F para equilibrar
las fuerzas de la superficie 2L, esto es:
F
y = F/2L (1.12)
Fig. 1.2.: Tensión superficial en la superficie de un líquido.
-7-
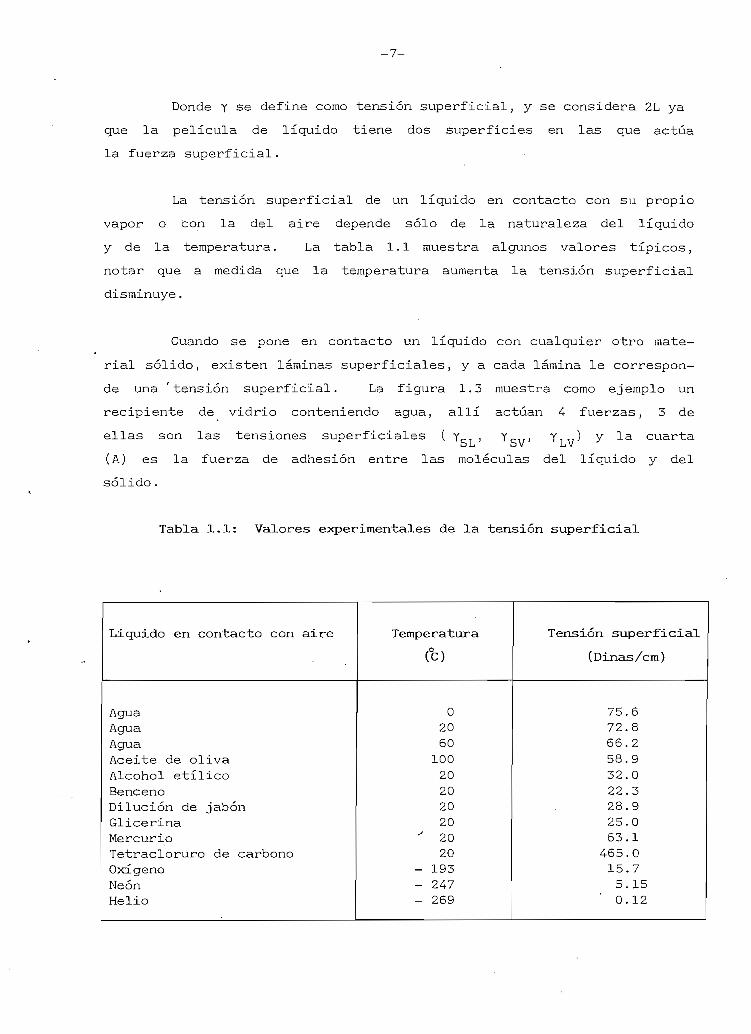
Donde y se define como tensión superficial, y se considera 2L ya
que la película de líquido tiene dos superficies en las que actúa
la fuerza superficial.
La tensión superficial de un líquido en contacto con su propio
vapor o con la del aire depende sólo de la naturaleza del líquido
y de la temperatura. La tabla 1.1 muestra algunos valores típicos,
notar que a medida que la temperatura aumenta la tensión superficial
disminuye.
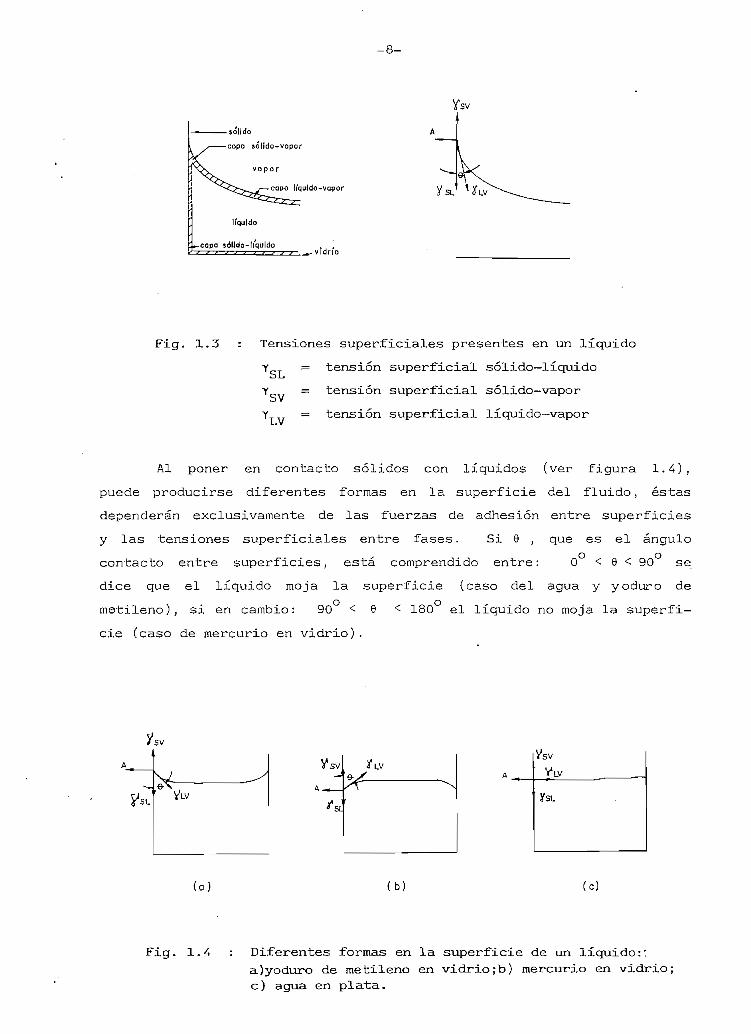
Cuando se pone en contacto un líquido con cualquier otro mate-
rial sólido, existen láminas superficiales, y a cada lámina le correspon-
de una 'tensión superficial. La figura 1.3 muestra como ejemplo un
recipiente de vidrio conteniendo agua, allí actúan 4 fuerzas, 3 de
ellas son las tensiones superficiales ( ycr , TcrW) Trw) y la cuartaolj o V l_i V
(A) es la fuerza de adhesión entre las moléculas del líquido y del
sólido.
Tabla 1.1: Valores experimentales de la tensión superficial
Liquido en contacto con aire
AguaAguaAguaAceite de olivaAlcohol etílicoBencenoDilución de jabónGlicerinaMercurioTetracloruro de carbonoOxígenoNeónHelio
Temper atur a
0206010020202020' 20
20- 193- 247- 269
Tensión superficial
(Dinas/cm)
75.672.866.258.932.022.328.925.063.1465.015.75.150.12
-solido
-capo solido-vapor
v a p o r
apa Ijqilfdo-vapor
líquido
-capa sólido-liquido- vidrio
Fig. 1.3 : Tensiones superficiales presentes en un líquido
YCT ~ tensión superficial sólido—líquido
Y = tensión superficial solido-vapor
YTV = tensión superficial líquido-vapor
Al poner en contacto sólidos con líquidos (ver figura 1.4),
puede producirse diferentes formas en la superficie del fluido, éstas
dependerán exclusivamente de las fuerzas de adhesión entre superficies
y las tensiones superficiales entre fases. Si 9 , que es el ángulo
contacto entre superficies, está comprendido entre: O < 6 < 90 se
dice que el líquido moja la superficie (caso del agua y yoduro de
metileno), si en cambio: 90 <
cíe (caso de mercurio en vidrio).
metileno), si en cambio: 90 < 6 < 180 el líquido no moja la superfi-
>sv
VLV
Vsv
(a)
Vsv
VLV
(b) (c)
Fig. 1.-4 : Diferentes formas en la superficie de un líquido::a)yoduro de metileno en vidrio;b) mercurio en vidrio;c) agua en plata.

-9-
1.2 CONCEPTOS GENERALES CONCERNIENTES A TRASDUCTORES
1.2.1 DEFINICIÓN DE TRASDUCTOR
"Un transductor es un dispositivo que proporciona una señal
utilizable en respuesta a una magnitud física, propiedad o condición
específica que se desea medir". (1)
Frecuentemente un transductor tiene otras denominaciones, así:
en procesos industriales se los denomina transmisores, en ocasiones
son conocidos también como sensores; en el campo de los dispositivos
electroópicos se los conoce como detectores, en otras ocasiones los
transductores son conocidos por galgas, captadores, sondas o dispositivos
que identifican la utilidad del dispositivo más la terminación metro
(acelerómetro identifica al transductor de aceleración, tacómetro
identifica al transductor de velocidad, etc...).
Algunos autores definen al transductor como un aparato compuesto
de dos partes: el sensor y el acondicionador de señal. El sensor
se define como el elemento primario sobre el que actúa directamente
la variable a medir, y las modificaciones causadas por éste, se convier-
ten en señales de información. El acondicionador de señal convierte
las señales integradas por el sensor en información proporcional a
la magnitud de la variable dinámica, en una forma que pueda ser utilizada
por elementos de control o por elementos de medida. (2)
La variedad de denominaciones obliga a la normalización de
terminología, a lo largo de la presente tesis se considerarán términos
equivalentes a sensor y transductor, aunque esto pueda causar discrepan-
cias .
1.2.2 PRINCIPIOS DE TRANSDUCCION
El fundamento de cualquier transductor se halla en el principio
de funcionamiento, para aspectos de diseño y construcción es la base
de la que partimos. A continuación nombraremos algunos de los principios
más conocidos:
-10-
- Capacitivo
— Inductivo '
— Reluctivo
— Electromagnético
- Piezoeléctrico
— Resistivo
- Rtenciométrico
- Fotoconductivo
— Fotovoltaico
- Termoeléctrico
- Ionización, etc.
El principio de transducción es aprovechado en muchísimos disposi-
tivos. Cada sensor trabajando con un mismo principio puede hallar
un sinnúmero de aplicaciones, así por ejemplo un sensor del tipo capaci-
tivo puede servir para detectar cambios de presión, nivel, desplazamien-
to , posición, etc.
Desde el punto de vista energético podríamos dividir en dos
clases a los transductores: aquellos que para su funcionamiento necesi-
tan ser excitados por una fuente de energía (por ejemplo: fuentes
de c.a., c.c., campo magnético, etc.) y aquellos denominadps transducto-
res autogeneradores o activos que no requieren una excitación externa
Ctransducción electromagnética piezoeleetrica, fotovoltaica y termoeléc-
trica) .
1.2.3 CARACTERÍSTICAS GENERALES
Un transductor queda plenamente identificado si de él conocemos
lo siguiente:
a) Características de la magnitud a medir: Un transductor se
diseña para una magnitud específica y para responder únicamente a
esa magnitud, de aquí que es importante conocer:
- Tipo de magnitud a medir_
- Rango de medición a operarse

-11-
Amplitud de raedici5n
Sobrerangos
b) Características eléctricas de diseño: Los transductores general-
mente ' vienen especificados por las características de las señales
de excitación y respuesta (entrada-salida), por las características
de las fuentes y cargas a colocarse y por sus impedancias correspondien-
tes. La figura 1.5. muestra esquemáticamente la estructura eléctrica
de un transductor, considerando no sólo al elemento sensor propiamente
dicho sino también su circuitería de excitación y acondicionamiento
de señal integrada. Los elementos externos a éste se consideran a
la magnitud del medio a medirse y la fuente de excitación y carga.
TRANSDUCTOR
CIRCUITER1A DE EXCITACIÓN
Y ACONDICIONAMIENTO DE
SEÑAL INTEGRADA
F U E N T E
(al terna o continua)
C A R G A
(Medidores, regís frador«(etc)
Fig. 1.5 Estructura típica de un transductor
Las señales electrónicas de trasmisión de información hacia
instrumentos de control o medida están siendo normalizadas entre 4
a 20 mA de corriente continua para equipos eléctricos y 3 a 15 psi
para instrumentos neumáticos.
La señal de salida o respuesta del transductor es función de
la entrada de excitación y usualmente es de naturaleza análoga, para
su interpretación se acoplan acondicionadores de señal que pueden
i ser analógicos o digitales, y sus acciones pueden comprender: cambio
\en el nivel de la señal, linealización, conversión A/D, filtraje,
acomplamiento de impedancias, etc.
Los elementos electrónicos y eléctricos relacionados en el
-12-
proceso deben ser especiales, así por ejemplo: los amplificadores
deberán presentar inmunidad al ruido, estabilidad de ganancia y estabi-
lidad térmica; se debe asegurar un buen sistema de tierra, cables
cortos y apropiados en la trasmisión de señales.
c) Características mecánicas de diseño: Son importantes puesto
que un acople mecánico apropiado a más de proporcionarle una mayor
vida útil al transductor le dará un más alto grado de confiabilidad
en las señales obtenidas.
Las especificaciones mecánicas básicas de un transductor pueden
ser las siguientes:
- Configuración del transductor (dibujos detallados)
— Dimensiones
— Previsiones de montaje y medidas de montaje
— Materiales constitutivos del transductor
— Grado de sellado (cuando sea necesario)
- Partes en contacto con la variable a medir
— Tipos de líquidos, sólidos o gases en contacto con el transductor
d) Características de actuación: Un transductor se identifica
por el tipo de respuesta o reacción frente a una señal de entrada,
para establecer su patrón de conducta debemos referirnos a las siguien-
tes características:
— Características estáticas: La operación de un transductor
bajo estas condiciones implica desempeño de trabajo en un medio estable
o con variaciones leves de la magnitud a medir en ausencia de fuerzas
perturbadoras como golpes, vibraciones, ruidos, etc. La característica
de desempeño entrada—saldia está definida bajo condiciones ideales
o teóricas, sin embargo un transductor real está afectado por su compor-
tamiento no ideal y esto es causa de errores, los más conocidos son
los siguientes: histéresis, no repetibilidad, zonas muertas, no lineali-
dad, desplazamiento del cero, desplazamiento de la sensibilidad, etc.
El error se define como la diferencia algebraica entre el valor leído
o transmitido por el transductor y el valor real de la variable sensada,

-13-
se expresa generalmente en tanto por ciento de la salida a fondo de
escala (% SFE), en ocasiones en tanto por ciento del valor de la lectura
de salida (% lectura), o también en términos de unidades de magnitud.
Para la determinación de las características de error se recurre a
la calibración, que no es más que dar un registro de la respuesta
a la magnitud de medida aplicada.
— Características dinámicas: En ocasiones las señales de entrada
de excitación de un transductor varían rápidamente o tienen cambios
bruscos en forma de escalón, en estos casos la característica de respues-
ta dinámica debe ser la apropiada. La respuesta dinámica de un sistema
en general se compone de la respuesta transitoria: que nos da una
visión del comportamiento del sistema desde el estado inicial al final,
y de la respuesta estacionaria: que nos proporciona un informe del
estado del sistema cuando el tiempo es suficientmente largo.
Los sistemas con almacenamiento de energía no pueden responder
instantáneamente y presentan respuestas transitorias siempre que se
los somete a entradas bruscas o perturbaciones. La respuesta de estos
sistemas frecuentemente presentan oscilaciones amortiguadas antes
de alcanzar el estado estacionario.
El análisis dinámico usualmente se lo hace con señales simples
de excitación que simulen las condiciones del medio; por lo general
estas señales de prueba simples son el escalón, rampa y la función
parabólica. Por último, el análisis de amortiguamiento, frecuencia
natural -y respuesta frecuencial completan el análisis dinámico.
e) Características del medio ambiente: Las características estáticas
y dinámicas de un transductor se especifican para determinadas condicio-
nes ambientales, la operación del sensor fuera de las condiciones
del medio provocan una desviación en la curva característica que es
causa de errores. Por esta razón un transductor debe diseñarse con
una cierta tolerancia a los cambios ambientales, el trabajo dentro
de cierto rango garantizará el buen desempeño del transductor.
Las condiciones del medio a tomarse en cuenta son:

-14-
— Temperatura
- Vibraciones del medio
— Presión ambiental
- Grado de humedad
- Efectos corrosivos del fluido en contacto
— Influencia de campos electromagnéticos
— Niveles de ruido
- Radiaciones presentes; etc.
1.3 TRANSDUCTORES DE NIVEL DE LÍQUIDOS
El presente subtema tiene por finalidad dar un tratamiento
especial a aquellos transductores de nivel de líquidos más usuales
en nuestro medio, no cabe tratar de explicar todos los existentes,
pues el tema resultaría largo y fuera del objetivo de la presente
tesis. Tan sólo se dará un enfoque global poniendo énfasis en el
principio de funcionamiento (leyes físicas y matemáticas), construcción,
características, ventajas, desventajas, etc. Los transductores a
tratarse son: flotación, presión, resistivos, conductivos y capacitivos.
1.3.1 FLOTACIÓN
El transductor de flotación es uno de los más antiguos y sencillos
que se hayan ideado para poder captar las variaciones de nivel de
un líquido. El principio de funcionamiento es el siguiente: se conoce
que cuando un cuerpo está total o parcialmente sumergido en un fluido
en reposo, el fluido ejerce una presión sobre todas las partes de
la superficie del cuerpo en contacto. La presión es mayor en lasi
porciones sumergidas a mayor profundidad, la resultante es una fuerza
ascendente llamada "fuerza de flotación" del cuerpo sumergido, cuya
magnitud es igual al peso del fluido desalojado por el cuerpo y que
actúa sobre el centro de gravedad o también llamado centro de flotación
del cuerpo (principio de Arquímedes).
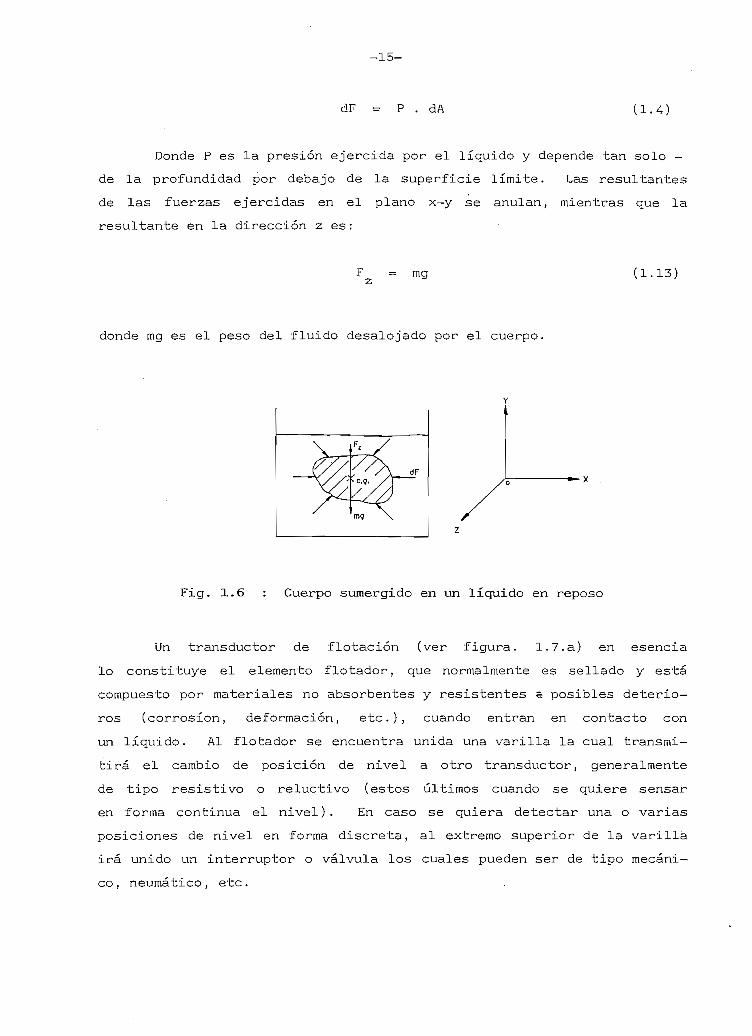
La figura 1.6 muestra un cuerpo sumergido en un líquido en
reposo, sobre cada superficie del cuerpo se desarrolla una fuerza
normal de valor:
-15-
dF = dA (1.4)
Donde P es la presión ejercida por el líquido y depende tan solo -
de la profundidad por debajo de la superficie límite. Las resultantes
de las fuerzas ejercidas en el plano x—y se anulan, mientras que la
resultante en la dirección 2 es:
= mg (1.13)
donde mg es el peso del fluido desalojado por el cuerpo.
\. 1.6
Cuerpo sumergido en un líquido en reposo
Un transductor de flotación (ver figura. 1.7.a) en esencia
lo constituye el elemento flotador, que normalmente es sellado y está
compuesto por materiales no absorbentes y resistentes « posibles deterio-
ros (corrosión, deformación, etc.)» cuando entran en contacto con
un líquido. Al flotador se encuentra unida una varilla la cual transmi-
tirá el cambio de posición de nivel a otro transductor, generalmente
de tipo resistivo o reluctivo (estos últimos cuando se quiere sensar
en forma continua el nivel). En caso se quiera detectar una o varias
posiciones de nivel en forma discreta, al extremo superior de la varilla
irá unido un interruptor o válvula los cuales pueden ser de tipo mecáni-
co , neumático, etc.

-16-
Trainductor de posicióno simple Interruptor Relé magnético
'Imán Interior
.Imán exterior
Guío no magne'tlca
b)
Fig. 1.7 : Transductores de flotación: a) Simple ; b) De tipo magnético
Los transductores de flotación pueden usarse con líquidos en
recipientes abiertos o cerrados, a presión o al vacío. En forma global
se habla de una precisión del +_ 1% a 3%.
La más notable ventaja es su sencillez comparada con otros
sensores, son de fácil construcción, independientes del peso específico
del líquido, fácil montaje y de costo bajo. Como desventaja puede
citarse la inoperancia con líquidos altamente corrosivos, o con líquidos
en los que debido a la dinámica de movimiento de nivel (burbujas,
olas, etc.) las lecturas dadas por -el sensor carecen de precisión.
La inmovilidad del flotador debido a trabas de naturaleza mecánica
o desgastes de los brazos sujetadores pueden dar una no muy buena
conflabilidad a este transductor cuando se usa con líquidos "peligrosos".
1.3.2 PRESIÓN
Como se había visto anteriormente, la presión hidrostática
a una altura H por debajo de la superficie de un líquido, está dada
por la ec. 1.11, transponiendo términos, obtenemos la altura de nivel
de un líquido donde todas las variables son conocidas, esto es:
H = (P - P')/pg (1.14)
Para tanques cerrados (P - P') es la presión diferencial
-17-
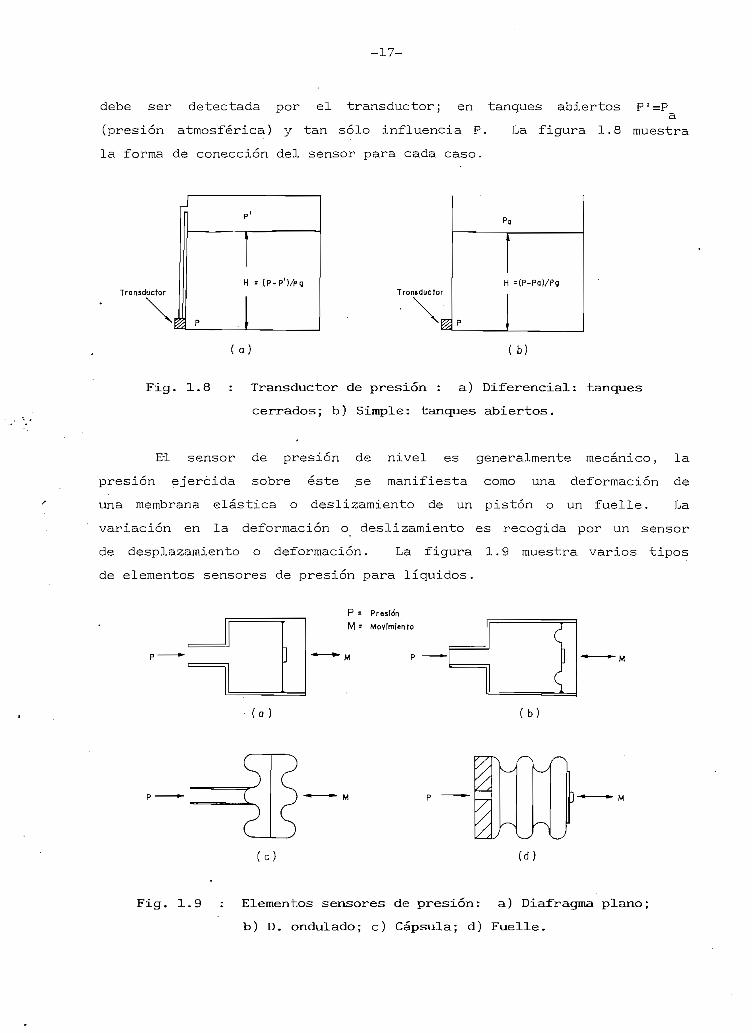
debe ser detectada por el transductor; en tanques abiertos P'=Pa
(presión atmosférica) y tan sólo influencia P. La figura 1.8 muestra
la forma de conección del sensor para cada caso.
TronsductorH = (P-P')/Pg
TronaductorH = (P~Po)/Pg
(a) (b)
: Transductor de presión : a) Diferencial: tanques
cerrados; b) Simple: tanques abiertos.
E-1 sensor de presión de nivel es generalmente mecánico, la
presión ejercida sobre éste se manifiesta como una deformación de
una membrana elástica o deslizamiento de un pistón o un fuelle. La
variación en la deformación o deslizamiento es recogida por un sensor
de desplazamiento o deformación. La figura 1.9 muestra varios tipos
de elementos sensores de presión para líquidos.
-P = Prestan
M = Movimiento <y<
(b)
c)
fI(d
Fig. 1.9 : Elementos sensores de presión: a) Diafragma plano;
b) D. ondulado; c) Cápsula; d) Fuelle.

-18-
Para todos los tipos de transductores de presión (no solamente
de presión hidrostática) dependiendo de la presión de referencia manteni-
da en uno de sus extremos, los sensores pueden estar diseñados para
medir presiones absolutas, manométricas o diferenciales (ver figura
1.10).
Vacio o }presión de
refe renc ia )
Preilon ambiento
v H. 1 /
medida
1
sI
/A 1 Presío'n
b )
Fig. 1.10 : Principios básicos de los sensores de presión
a) Presión absoluta y diferencial de referencia
interna; b) Presión manométrica y diferencial.
El "diafragma" (figura 1.9.a y 1.9-b) en un transductor de
presión no es más que una delgada lámina circular, la cual tiene propie-
dades elásticas especiales, una vez que cesan las fuerzas de deformación
ésta vuelve a su estado normal. El diseño de diafragmas requiere
cálculos complejos y exactos. En el mercado suelen encontrarse varias
formas de diafragmas, la figura 1.11 muestra algunos tipos, los más
usuales son los diafragmas planos y los esféricos.
(b) (c)
(d)
Fig. 1.11: Diferentes diafragmas: a) Plano; b) Esférico;
c) Catenario, d) Cabeza de tambor; e) Anular
(nivelado); f) anular (retirado).

-19-
Los materiales usados en la construcción de un diafragma son:
•aleaciones metálicas elásticas como latón, bronce, bronce-fósforo,
cobre-berilio; acero inoxidable, también se utilizan aleaciones especia-
les como Monel, Incohel-X y Ni-Span-C (aleación de niquel y hierro).
Debido a una absorción de energía del diafragma, se presentan
histérisis en los ciclos de calibración, tratamientos térmicos especiales
ayudan a reducir este problema.
Diafragmas especiales (ligeros) hechos de láminas de metal
delgadas, caucho, neopreno o plástico, son denominados membranas,
las que se unen con un muelle el cual proporciona las propiedades
elásticas. Esta opción es útil cuando no se quiere contactos entre
el fluido de entrada y el elemento sensor. El volumen existente entre
el elemento sensor y el diafragma de aislamiento se rellena con un
líquido especial, puede ser aceite de silicona (fluido de transferencia) ,
todo esto para transferir la fuerza ocasionada por la presión desde
la membrana hasta el elemento sensor.
Otro tipo de elemento sensor es la "cápsula" (figura 1.9.c),
la cual consta de dos diafragmas ondulados anulares, con las curvaturas
de la ondulación en oposición y selladas juntas por su periferia,
en uno de los extremos se aplica presión, el otro extremo está reforzado
para originar el deslizamiento mecánico. El uso de dos diafragmas
en forma de cápsula duplica el efecto de flexión obtenido a partir
de un diafragma único. Multiplicaciones adicionales de la flexión
pueden ser obtenidas utilizando dos o más cápsulas, juntas. (1)
Los "fuelles" (figura 1.9.d) están hechos típicamente a partir
de tubos de paredes finas formando convoluciones en donde uno de los extre
mos está cerrado, el fuelle se desplaza axialmente cuando se aplica
una presión en la apertura del lado opuesto. El número de convoluciones
puede variar desde 10 hasta 20 dependiendo del rango de presión y
del desplazamiento (carrera) requerido. Dado que los diámetros internos
de los fuelles se encuentran entre el 50 y el 90% del diámetro exterior,
al área efectiva de una convolución es sustancialmente para rangos
de presión baja y cuando no existen vibraciones significativas ¡ en

-20-
el medio. También pueden usarse como un elemento de aislamiento en
tre la presión del fluido y el transductor de desplazamiento. (1)
Un transductor de presión puede combinarse, con tranductores
de desplazamiento o de deformación, tales transductores pueden ser
de tipo capacitivo, resistivo, reluctivo, de galgas extensométricas,
piezoeléctricos, etc.
Los transductores de presión tienen una precisión del 0.5 %.
Pueden detectar continuamente la variación de nivel en tanques abiertos
y cerrados a presión y al vacío, no tienen partes móviles dentro del
tanque, son de fácil limpieza, no están en contacto con la superficie
del líquido lo que les permite tener una inmunidad a las perturbaciones
de nivel (olas, burbujas, etc.). Como desventaja de este transductor
cuenta la inoperancia con líquidos con sedimentos o pequeños sólidos
que pueden obstruir al elemento transmisor de presión. En tanques
cerrados la condensación de los vapores puede causar errores de lectura
si no se toman previsiones (trampas de humedad).
1.3.3 RESISTIVOS
En forma general los transductores resistivos varían su resistencia
en respuesta a un cambio de la magnitud a medir. El valor de la resis-
tencia en algunos conductores o semiconductores se ve afectado en
magnitud al variar las condiciones externas a que están sometidos,
tales como: aplicación de esfuerzos mecánicos (efec-=o piezoresistivo) ,
temperatura, humedad o posición de una escobilla de contacto (potencióme-
tro ) .
Quizás el transductor de nivel resistivo más elemental que
podamos encontrar sea del tipo potenciométrico, el cual no actúa directa-
mente sobre la variable nivel de un líquido sino que lo hace en combina-
ción con otros transductores, por ejemplo analicemos el caso de un
transductor resistivo actuando conjuntamente con un transductor de
flotación (caso más usual y más simple). Veamos: el eje sensor,
en nuestro caso la varilla que une el flotador con el transductor
resistivo, comunica el desplazamiento a un contacto denominado escobilla,

-21-
que se desliza sobre un elemento resistivo. Si a los extremos del
potenciómetro colocamos tensión, la escobilla recogerá variaciones
de voltaje con el cambio de nivel. Ver figura 1.12.
Escobillo de contacto Soporte aislado
Flo tador V I n
( a ) ( b )
Fig. 1.12 : Transductor resistivo: a) elementos constitutivos ;
b) variación de tensiones.
Cuando el elemento potenciométrico es bobinado j típicamente
de platino o niquel, la resolución viene dada por el número de vueltas
por unidad de longitud. Para alta resolución se acostumbra utilizar
resistencias elevadas (5K a 10K) y un hilo conductor delgado ($ — 0.1 mm),
las espiras se bobinan muy juntas para evitar saltos de voltaje con
el deslizamiento de la escobilla, de esta forma se simula continuidad
en las mediciones. Otros tipos de potenciómetros son elaborados de
plástico conductor, película de carbón, película metálica o mezclas
metal-cerámica (cermet). El soporte es de material aislante o metálico
recubierto de aislante. Las escobillas se fabrican normalmente de
aleaciones de cobre o metales preciosos (Au, Pt, Ag) . Para evitar
efectos de golpes o de vibraciones externas se utilizan muelles tensores
o escobillas dobles. Para no permitir deterioros prematuros por filtra-
ción de partículas de polvo, humedad, gases corrosivos, líquidos conduc-
tores, etc., se acostumbra a sellar a los T. con materiales plásticos.
Este tipo de T , de nivel es típico en la medición de cantidad
de combustible- en los automotores, es barato y sencillo. Puede ser
desventajoso con líquidos que presenten vapores corrosivos, para este
caso se hace indispensable un perfecto sellado del elemento resistivo.

-22-
1.3.4 CONDUCTIVOS
El principio utilizado por estos sensores de nivel es el de
la conducción electrolítica, donde los portadores de carga son los
iones presentes en una disolución. Cuando el líquido a usarse es
eléctricamente neutro (no posee iones) no puede utilizarse este sensor.
Los iones cargados positivamente toman el nombre de cationes mientras
que los cargados negativamente se denominan aniones. Por ejemplo
el Cloruro de Sodio (ClNa) disuelto en agua produce iones Cl y Na .
Como puede observarse en la figura 1.13, al aplicarse una tensión
continua Vab a los terminales a y b, los electrodos quedan definidos
como ánodo ( + ) y cátodo (-) . Debido al campo eléctrico producido
los aniones se dirigirán al ánodo y los cationes al cátodo.
Ánodo
-oa
-ob
— Cátodo
. Líquido conductor
Fig. 1.13 : Principio de los transductores conductivos.
La corriente circulante es función de la tensión aplicada y
de la resistencia de la disolución. La resistencia de la disolución
(R ) a la vez depende de la1 naturaleza del disolvente, del número
de iones presentes y de la movilidad iónica.
La conductancia electrolítica de la disolución (G,) se defined
como el inverso de la resistencia:
Gd - 1/Rd (1.15)
En consecuencia G es proporcional al número de iones presentes,

-23-
a la movilidad del ion y es dependiente de la temperatura. ( G se
expresa en Siemens = I/ & ).
El parámetro que nos indica la concentración de una disolución
es la conductividad y viene expresada en S/m ó uS/m, se define como:
ct - Gd . L/A (1.16)
a = G, . Kd s
donde:
a = conductividad
L != es la longitud de separación de los electrodos
A = es el área efectiva de cada electrodo
G, = es la conductancia de la disolucióndL/A — es la constante del sensor, constante de celda, constante
del electrodo, etc. = Ks
La excitación de los electrodos con una fuente de tensión continua
puede alterar en grado considerable las características eléctricas
del sistema (disolución y electrodos). Al aplicar una tensión constantej
la característica corriente versus tiempo mostrará primero un. pequeño
transitorio debido a la capacidad del sensor y sus hilos de conexión,
seguidamente habrá un corto período de tiempo donde la corriente es
función de la conductancia (que es lo que nos interesa) y finalmente
un período largo durante el cual la electrólisis en la superficie
del electrodo hará disminuir la corriente hasta alcanzar un valor
mínimo cuando se polariza el sensor.
Cuando la tensión es sinusoidal se obtiene una media de los
estados anteriormente descritos, pero nuestro interés está en el período
en que la conductancia es función de la corriente a través de la disolu-
ción, esto se puede lograr con una tensión de excitación en forma
de onda cuadrada. Ver figura 1.14-, Tanto la amplitud de la tensión
alterna como la frecuencia de oscilación deben estar limitadas a ciertos

-24-
valores para no producir efectos secundarios,
4- V
Fig. 1.1-4 : Forma de onda ideal de excitación para un t. conductivo.
El tiempo de subida debe ser lento para minimizar el transitorio
producido por la capacidad, la frecuencia debe ser suficientemente
alta (iKhz - lOKhz) para que se invierta la polaridad antes de que
la electrólisis sea significativa.
Los electrodos se construyen en materiales resistentes a la
corrosión de los líquidos y efectos de ionización, tales materiales
pueden ser aleaciones especiales como Niquel-Hierro, o tener recubrimien-
tos de oro. El .soporte de cada electrodo está constituido por materiales
aislantes, estos pueden ser de polivinilclorido, epoxi, silicona,
o plásticos especiales (fuertes a la corrosión y temperatura). Los
electrodos deberán, instalarse de manera que sea fácil desmontarlos
y reinstalarlos, ya que frecuentemente deben ser limpiados.
Una de las desventajas de este transductcr es que la conductividad
varía por efecto de la temperatura (ver tabla No. 1-2) y por el grado
concentración, de la disolución, por lo que se lo utiliza tan sólo
en la detección de niveles discretos.
La figura 1.15 muestra la relación conductividad vs. concentra-
ción, notar que a bajas concentraciones la relación es lineal, mientras
que para altas concentraciones la relación se torna no lineal. Si
quisiéramos sensar el nivel del líquido en forma continua estos dos
factores: temperatura y concentración, jugarían un papel importante.

-25-
CaCL
CONDUCTIVIDAD (S/cm)
1.0 - •
CONCENTRACIÓN {mg /L ) CONCENTRACIÓN {% peso)
b)
ICO
Fig. 1.15 : Conductividad en función de varias disoluciones:
a) concentraciones bajas; b) conc. altas.
Los T. de conductividad tienen otras aplicaciones tales como
medidas de concentración de disoluciones, cantidad de sólidos disueltos
en aguas naturales, detección de goteo y derrame, medición de salinidad.
Tabla l.2¡ Efecto de la temperatura en la conductividad
de varias sustancias
~ ~—— — ___^ TEMP.°C
SOLUCIÓN ^ -- __
Agua ultra puraNaCl5% NaOH5% H2S04Ortosilicato de sodioNH3 diluidoHND3 diluido4% ácido acéticoLicor negroLicor blancoAgua filtrada0.01% H3PD4Jarabe de azúcar10% HC198% H2S0425% aceite
RADIO DE CONDUCTIVIDAD A 25 °C
0
0.220.540.57-_
0.500.65---
-0.340.64-—
25
1.001.001.001.001.001.001.001.001.001.00
1..001.001.001.001.00
50
3.lf1.531.431.241.461.471.311.301.441,50
1.302.411.331.711.92
75
7.462.151.871.421.901.831.581.521.832.03
1.524.401.632.562.82
100
14.22.732.321.522.312.051.80
2.19
1.676.931.873.503.75

-26-
1,3.5 CAPACITIVO
Los transductores de nivel capacitivo varían su capacidad por
variaciones de nivel del dieléctrico. Para dos placas de metal paralelas
y un dieléctrico interior a ellas la expresión está dada por la ec.
1.17.
C = KA/d (1-17)
donde:
C
K
A
d
capacidad
constante dieléctrica
área efectiva de los electrodos
distancia de separación de los electrodos
/
Kg /
'/ Kl
Ceq
003109
Fig. 1.16 : Capacitor de placas paralelas inmerso en un
líquido de constante dieléctrica Kl.
La figura 1.16 muestra un capacitor de placas paralelas inmerso
en un líquido. Tanto la parte líquida como la gaseosa tienen una
constante dieléctrica definida. Para el caso de la figura se tendrá
dos condensadores en paralelo:
eq= C -i- C,
g 1(1.18)

-27-
C = K (A /d) + K. (A,/d) (1-19)eq g g 1 1
donde:
C =3 es la capacitancia de la zona gaseosa
C - es la capacitancia de la zona líquida
C =3 es la capacitancia equivalente
K = es la constante dieléctrica de la zona gaseosa9 .
[/•1 = es la constante dieléctrica de la zona líquida
A 3= es el área ocupada por el medio gaseoso
A 3= es el área ocupada por el medio líquido
d ES es la separación existente entre las placas met.
Si K , K y d permanecen fijas, y existen variaciones de nivel de
líquido, entonces Ceq variará con el nivel, puesto que Ag y Al también
varían. Si K > K se tiene que para un aumento de nivel del líquido Cec
aumenta y viceversa si el nivel del líquido se reduce.
Para obtener mejores resultados se pueden variar las formas
de las placas y las distancias de separación, entonces las expresiones
de Ceq podrán complicarse tanto como uno quiera, pero en. definitiva
tendrán la misma forma que la ec. 1.17.
Cuando se tiene recipientes de paredes metálicas conteniendo
líquidos de constante dieléctrica alta, un solo electrodo basta para
formar junto con el recipiente el transductor capacitivo; para recipien-
tes no metálicos y con líquidos de constante dieléctrica baja por
lo general se utilizan electrodos cilindricos metálicos concéntricos _
como el de la figura 1.17.
Los electrodos se construyen de materiales fuertes a las acciones
perjudiciales del líquido utilizado, para el caso de líquidos corrosivos
los cilindros pueden ser aleaciones metálicas como por ejemplo bronce,
o de metales resistentes como el cobre. Los electrodos deben poseer
soportes aislantes, éstos pueden ser de plástico, acrílico, cerámica,
etc. Los del tipo cilindro concéntricos son dotados de agujeros por *
donde el líquido entra y sale, es importante diseñarlos de tal forma
-28-
que el líquido no se retenga en el sensor cuando el nivel baje al
mínimo.
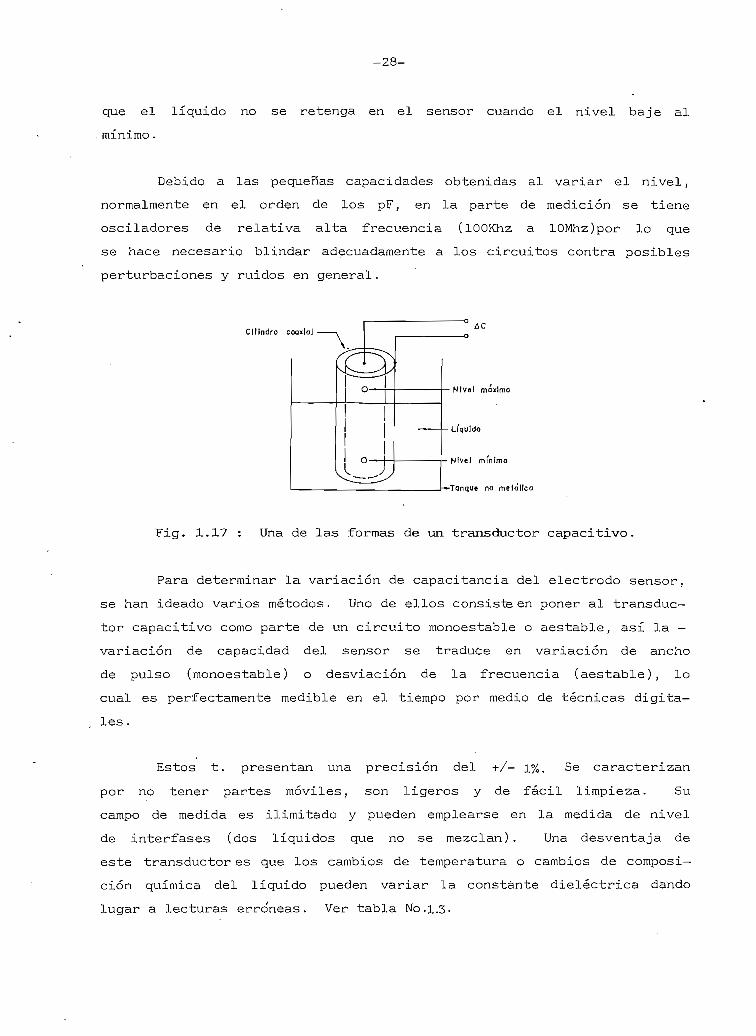
Debido a las pequeñas capacidades obtenidas al variar el nivel,
normalmente en el orden de los pF, en la parte de medición se tiene
osciladores de relativa alta frecuencia (lOOKhz a 10Mhz)por lo que
se hace necesario blindar adecuadamente a los circuitos contra posibles
perturbaciones y ruidos en general.
floxia 1 •
\
^.
c
^ c
b
i .,
N)
^
" ¿c
—Tonque na meta'líco
Fig. 1.17 : Una de las formas de un transductor capacitivo.
Para determinar la variación de capacitancia del electrodo sensor,
se han ideado varios métodos. Uno de ellos consiste en poner al transduc-
tor capacitivo como parte de un circuito monoestable o aestable, así la -
variación de capacidad del sensor se traduce en variación de ancho
de pulso (monoestable) o desviación de la frecuencia (aestable), lo
cual es perfectamente medible en el tiempo por medio de técnicas digita-
les .
Estos t. presentan una precisión del +/- 1%. Se caracterizan
por no tener partes móviles, son ligeros y de fácil limpieza. Su
campo de medida es ilimitado y pueden emplearse en la medida de nivel
de interfases (dos líquidos que no se mezclan). Una desventaja de
este transductor es que los cambios de temperatura o cambios de composi-
ción química del líquido pueden variar la constante dieléctrica dando
lugar a lecturas erro'neas . Ver tabla No .1.3.

CAPITULO IIMÉTODOS DE DETECCIÓN DE NIVEL DE LÍQUIDOS
En la detección del nivel del líquidos se pueden utilizar princi-
pios básicos conocidos como son: presión hidrostática, desplazamiento
de flotadores, observaciones ópticas y propiedades eléctricas de los
líquidos. También se pueden emplear métodos especiales como radiación,
ultrasonido, transferencia calórica,"etc.
2.1 CLASIFICACIÓN DE LOS MÉTODOS
Los métodos de detección de nivel podemos clasificarlos en
dos tipos: directos e indirectos, veamos los principales.
Métodos directos:
1. Observación visual directa del nivel del líquido en una .escala
perfectamente calibrada.
2. Determinación de la posición de elementos flotadores.
3. Interrupción de un rayo de luz dirigida hacia una selda fotoeléc-
trica.
4-. Reflexión de ondas de radio o radar u ondas sónicas en la superfi-
cie de un líquido.
Métodos indirectos:
1. Medición de la presión hidrostática desarrollada en un líquido.
2. Determinación térmica entre el líquido y la fase de vapor en
el recipiente.
3. Detección de nivel haciendo uso de propiedades eléctricas de
los líquidos.
4. • Atenuación de radiación a través de la fase vapor-líquido.-31-

-32-
En contraste a los métodos directos de medición, la mayoría
de los métodos indirectos son susceptibles de errores, como por ejemplo
cambio en la densidad del líquido debido a la variación en la composición
o efectos de temperatura.
2.2 DESCRIPCIÓN DE LOS MÉTODOS PRINCIPALES
A continuación se van a describir los métodos más comúnmente
usados en la detección de nivel de líquidos, estos métodos se basan
en principios básicos, químicos, mecánicos o eléctricos. Cada método
tiene su técnica en particular la cual hace uso de sensores o transducto—
res que captan una variable en particular hacia aparatos registradores,
indicadores, medidores, o para ser utilizadas en procesos de control.
2.2.1 MÉTODOS DIRECTOS
a) Medida directa de nivel con instrumentos de sonda graduada:
En la figura 2.1 puede observarse tres instrumentos que dan una medida
directa del nivel del líquido, éstos poseen ya sea una varilla o cinta
graduada que proporcionan el dato.
La figura 2.1.a muestra el medidor de sonda donde la varilla
o regleta se introduce en el líquido, la lectura se efectúa con el
tanque o recipiente abierto a presión atmosférica. La figura 2.1.b
usa el mismo principio de medición que el anterior, la varilla graduada
posee un gancho para indicar el momento en que éste r«ompe la superficie
del líquido. El medidor de sonda graduada (figura '2.1.c) se utiliza
alternativamente en los casos de difícil acceso al fondo del recipiente.
-carrete
-cinta graduada
_—plomo
Fig. 2,1 : Medidor de sonda: a) Varilla; b) Varilla con
gancho; c) Cinta y plomada.
-33-
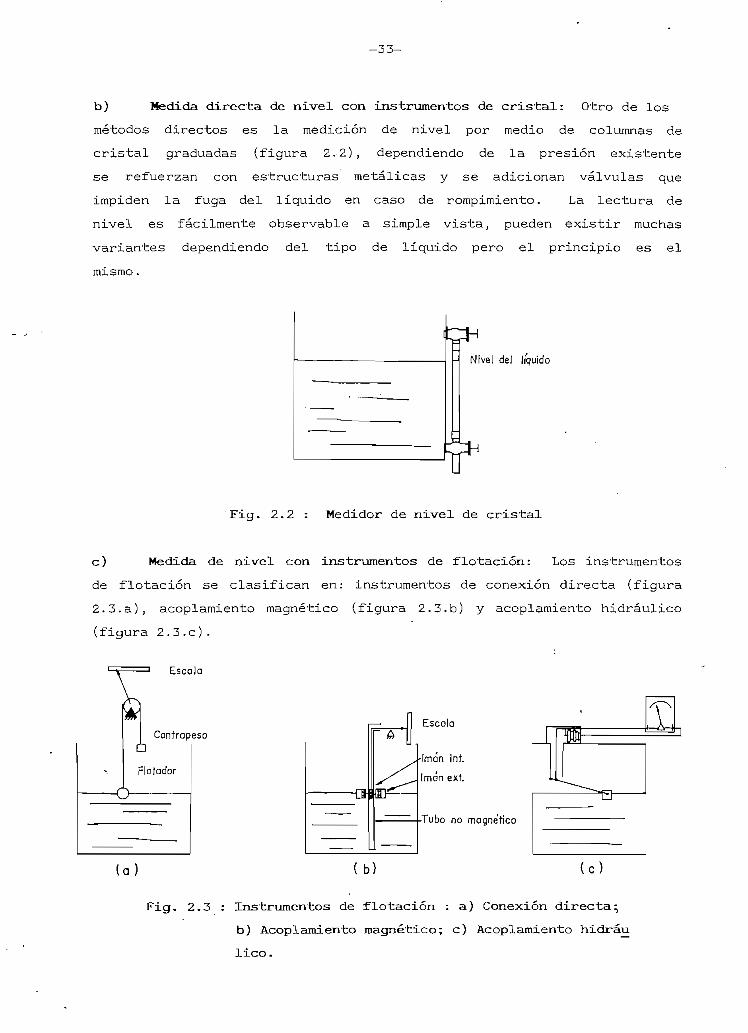
b) Medida directa de nivel con instrumentos de cristal: Otro de los
métodos directos es la medición de nivel por medio de columnas de
cristal graduadas (figura 2.2), dependiendo de la presión existente
se refuerzan con estructuras metálicas y se adicionan válvulas que
impiden la fuga del líquido en caso de rompimiento. La lectura de
nivel es fácilmente observable a simple vista, pueden existir muchas
variantes dependiendo del tipo de liquido pero el principio es el
mismo.
Nivel del líquido
Fig. 2.2 Medidor de nivel de cristal
c) Medida de nivel con instrumentos de flotación: Los instrumentos
de flotación se clasifican en: instrumentos de conexión directa (figura
2.3.a), acoplamiento magnético (figura 2.3.b) y acoplamiento hidráulico
(figura 2.3.c).
Escala
Contrapeso
Fig. 2.3
Escola
•imán iní.
imán ext.
•Tubo no magnético
(c)
Instrumentos de flotación : a) Conexión directa^
b) Acoplamiento magnético; c) Acoplamiento hidráu
lico.
-34-
El movimiento del flotador puede transmitirse a transductores
del tipo reluctivo y potenciométrico situados en el exterior del tanque
(medición continua) o a válvulas o interruptores (medición discreta).
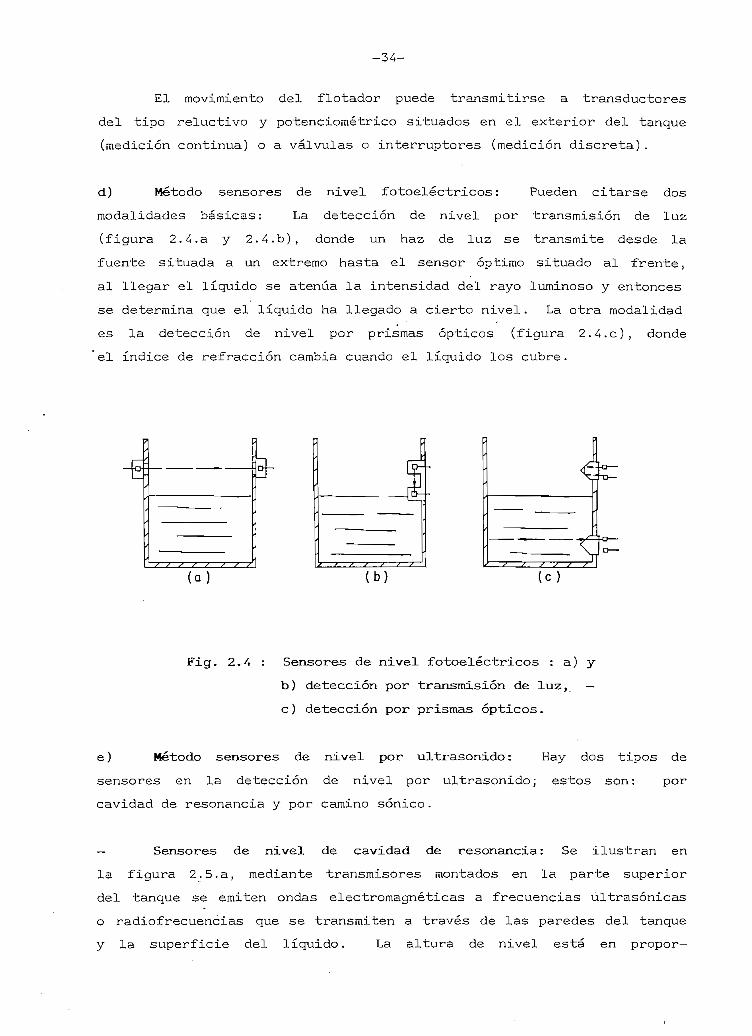
d) Método sensores de nivel fotoeléctricos: Pueden c i tars e dos
modalidades básicas: La detección de nivel por transmisión de luz
(figura 2.4.a y 2.4.b), donde un haz de luz se transmite desde la
fuente situada a un extremo hasta el sensor óptimo situado al frente,
al llegar el líquido se atenúa la intensidad del rayo luminoso y entonces
se determina que el líquido ha llegado a cierto nivel. La otra modalidad
es la detección de nivel por prismas ópticos (figura 2.4.c), donde
'el índice de refracción cambia cuando el líquido los cubre.
s s s s / / /
(b) (c)
Fig. 2.-4 : Sensores de nivel fotoeléctricos : a) y
b) detección por 'transmisión de luz, —
c) detección por prismas ópticos.
e) Método sensores de nivel por ultrasonido: Hay dos tipos de
sensores en la detección de nivel por ultrasonido; estos son: por
cavidad de resonancia y por camino sónico.
— Sensores de nivel de cavidad de resonancia: Se ilustran en
la figura 2.5.a, mediante transmisores montados en la parte superior
del tanque se emiten ondas electromagnéticas a frecuencias ultrasónicas
o radiofrecuencias que se transmiten a través de las paredes del tanque
y la superficie del líquido. La altura de nivel está en propor—

-35-
ción inversa al volumen no ocupado por el líquido, cuando el nivel
aumenta el volumen no ocupado por el líquido disminuye y la frecuencia
de resonancia cambia. Conocida la frecuencia de resonancia del tanque
vacío y aplicando un factor de escala pueden determinarse el nivel.
Este tipo de sensores son raros y se aplican en situaciones muy especia-
les .
— Sensores de nivel de camino sónico: Pueden ser: a) de tipo
continuo (figura 2.5.b) en el que se monta un transmisor y un receptor
de ultrasonido en el mismo módulo o un sólo elemento actuando como
transmisor y receptor alternativamente. Los transmisores trabajan
aproximadamente a unos 20 Khz. Según el tipo de sensor en esta catego-
ría pued'en montarse en la parte superior o inferior del tanque.
El transmisor emite pulsos de ultrasonido que chocan con la superficie
del líquido, la onda se refleja y es captada por el receptor. La
demora entre la emisión y captación es función directa del nivel,
se puede entonces determinar la altura del líquido si se conoce la
velocidad de transmisión de la onda de ultrasonido en el medio.
b) De tipo discreto (figura 2.5.c) en el que el transmisor y receptor
se montan separadamente, la atenuación que sufre la onda de ultrasonido
pueden ser captada por el receptor cuando el líquido ocupa el camino
de transmisión.
tuUJ ni. i
Ib) íc]
Fig. 2.5 : Sensores de ultrasonido: a) cavidad de
resonancia; b) camino sónico (continuo)*
c) camino sónico discreto.

-36-
f) Método sensores de nivel por oscilación amortiguada: Estos senso-
res poseen un elemento oscilante, al pasar del ambiente gaseoso al
líquido dan un cambio en la amortiguación. La figura 2.6 muestra
dos tipos: a) Uno de ellos utiliza una varilla vibrante cuya amplitud
de oscilación se reduce al aumentar el amortiguamiento viscoso cuando
la varilla se sumerge en el líquido. El cambio se detecta con un
transductor de desplazamiento (típicamente de reluctancia). La oscila-
ción está en el rango bajo de audio frecuencia. b) El otro tipo
utiliza un elemento piezoeléctrico diseñado para oscilar tan sólo
en el medio gaseoso, su frecuencia de oscilación está en el rango
del ultrasonido.
=[
Fig. 2.6 : Sensores de nivel por oscilación amortiguada- a) Magnetoestrictivo; b) Piezoeléctrico.
2.2.2 MÉTODOS INDIRECTOS
a) Métodos hidrostáticos: Se expondrá cuatro tipos clásicos de medi-
dores: manométrico, de membrana, tipo burbujeo y de presión diferencial.
Al) Medidor manométrico: El nivel de un líquido puede ser deducido
por intermedio de un manómetro, este instrumento varía su escala según
la presión hidrostática ejercida por el líquido (ver figura 2.7).
La presión debida a la altura H del líquido está dada por la
ec. 1.11. El aire comprimido debido a la presión hidrostática empuja
en la superficie inferior a un diafragma flexible, ocasionando la
ascensión y comprensión de aire en relación directa con el nivel del
líquido.

-37-
Nlvcl máximo
Manómetro
Fig. 2.7 Medidor manométrico.
A2) Medidor de membrana: El medidor de membrana o caja diafragma
mostrado en la figura 2.8 se utiliza en los casos de difícil localiza-
ción del medidor por debajo o al nivel mínimo del líquido contenido
en el recipiente.
El principio de funcionamiento es el siguiente: la columna
de líquido ejerce una presión hidrostática en la parte inferior del
diafragma, ocasionando movimiento hacia arriba y comprimiendo al
aire atrapado en relación inversa al nivel del líquido. La presión
que el líquido ejerce está dada por la ec. 1.11. Debido a la compresi-
bilidad del volumen de aire atrapado, el sistema actuará a distancias
no mayores de 25 m. No debe existir fugas de aire porque descalibran
al sistema. Cuando se utilizan líquidos en suspensión se conecta
una tubería de purga en la parte inferior del diafragma a fin de
hacer limpiezas esporádicas.
conexión al
líquido —
Abertura •
conexión paro ]a medición
- n i v e l cero
lineo de sedimentación
Fig. 2.8 ; Medidor de membrana.

-38-
A3) Medidor tipo burbujeo: El sistema de medición de nivel por
burbujeo consiste en la inyección de aire o gas por una tubería
inmersa en el líquido, la presión del aire o gas en la tubería equivale •
a la presión hidrostática ejercida por la columna de líquido. Como
puede verse en la figura 2.9 existen dos ramales de tubería que
empatan en sus extremos. En el ramal superior se sitúa la fuente
de aire o gas acompañado de un regulador de presión y un rotámetro
con válvula de aguja. Por intermedio de este sistema se logra controlar
el flujo de aire constante para un mismo nivel. El otro ramal es
el de medición, la presión es evaluada por un manómetro de fuelles
que puede situarse a distancias de hasta 200 m. La presión está/dada por la ec. 1.11.
Nivel máximo
Hmax.
Nivel mínimo
rotometro regulador
—fuente de aire o gas
al medidor
Fig. 2.9 Medidor tipo burbujeo.
Medidores de presión diferencial: Los medidores de presión
hidrostática diferencial pueden dividirse en húmedos y secos. En
los .de tipo húmedo, como por ejemplo un manómetro, el fluido medido
está en contacto directo con mercurio (tubo en U) u otro líquido
inmiscible. En el medidor tipo seco, la presión es aplicada directamen-
te a través de un diafragma o fuelle. Tanto para tanques abiertos
o cerrados se aplican • sensores de presión diferencial en los que
se debe tomar en cuenta: 1) el rango de medición; y 2) la compensación
de los cambios en la gravedad específica del líquido en el recipiente.
La segunda consideración es inherente a todos los métodos hidrostáticos
porque el cambio de la gravedad específica afecta al cabezal de medición.
En algunos diseños se incorpora un mecanismo de ajuste que compensa
-39-
cualquier cambio de la gravedad específica.
La fuerza resultante o movimiento producido por el diafragma
o fuelle de los medidores del tipo seco, se convierte comúnmente en
señales de transmisión neumática o eléctrica dirigida a indicadores,
registradores o controladores, éstas están en el rango de 3 a 15 psig
y a 4 a 20 mA respectivamente.
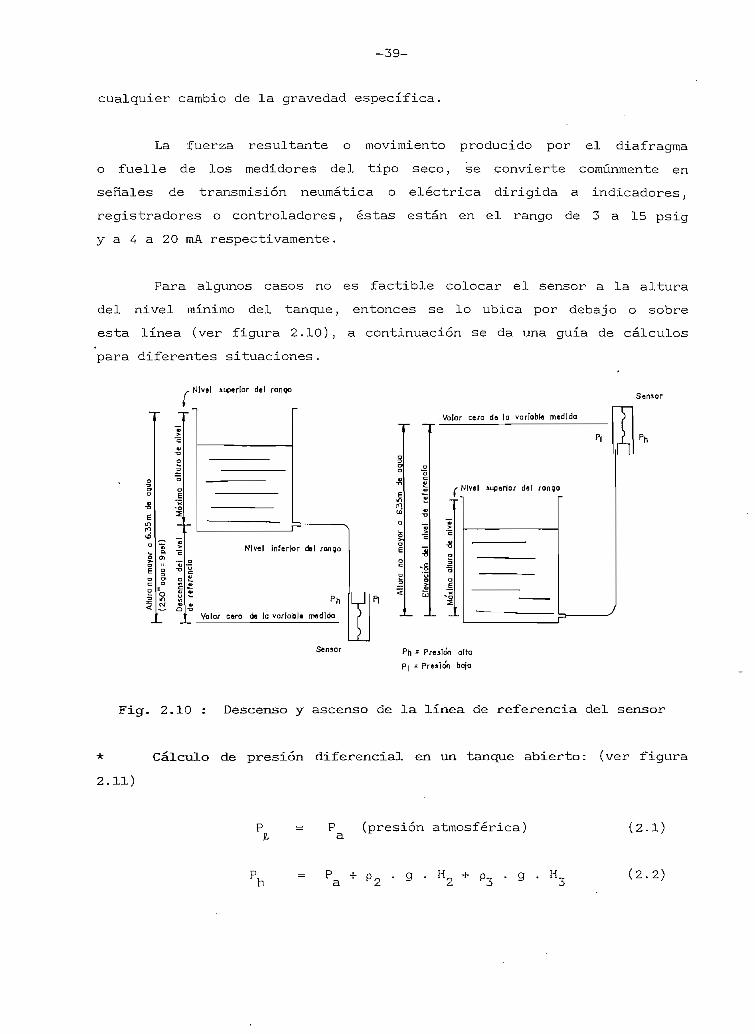
Para algunos casos no es factible colocar el sensor a la altura
del nivel mínimo del tanque, entonces se lo ubica por debajo o sobre
esta línea (ver figura 2.10), a continuación se da una guía de cálculos
para diferentes situaciones.
- N i v e l si4>erlor del rongo
Valor cero de la variable medida
Nivel inferior del rango
Ph
Valor cero de la variable medida
• Nivel superior del rango
Ph = Presión alio
P| = Presión boja
Fig. 2.10 : Descenso y ascenso de la línea de referencia del sensor
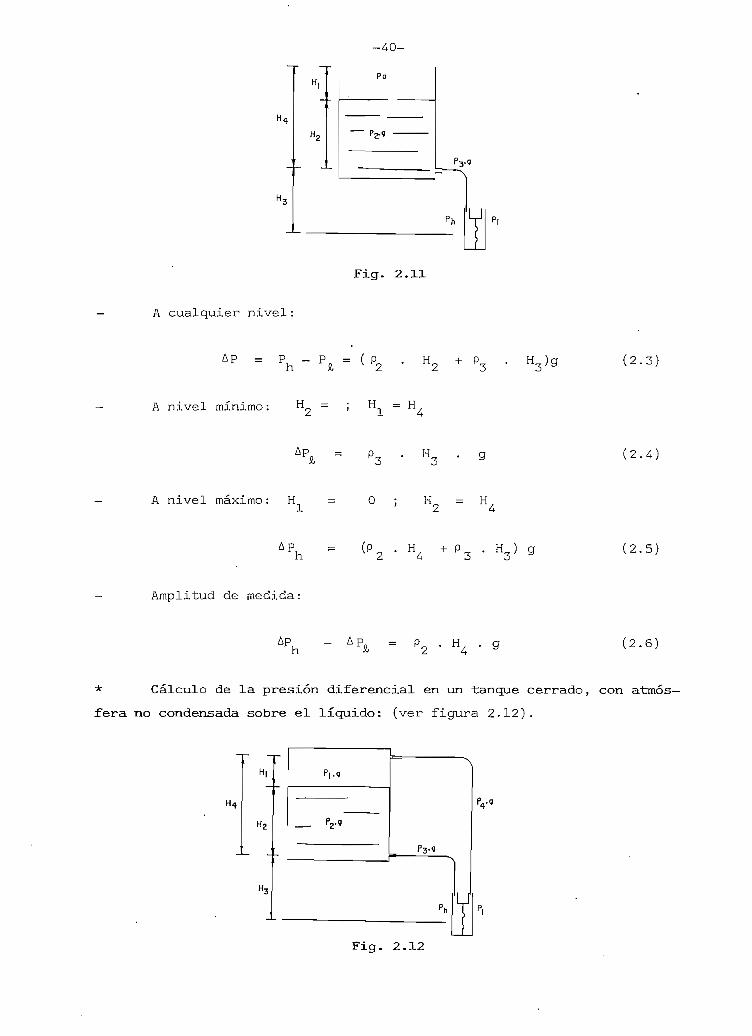
* Cálculo de presión diferencial en un tanque abierto: (ver figura
2.11)
P (presión atmosférica)
Ph = Pa + '2 ' g ' H2 + '3
(2.1)
( 2 . 2 )
-40-
H4
P,.g
Fig. 2.11
A cualquier nivel:
AP = Ph - Pa = ( P2 ' H2 + P3
A nivel mínimo: ~
(2.3)
(2.4)
A nivel máximo: H1O ;
AP,' H4 + P 3 '
( 2 . 5 )
Amplitud de medida:
(2.6)
* Cálculo de la presión diferencial en un tanque cerrado, con atmós-
fera no condensada sobre el líquido: (ver figura 2.12).
P9.g
Fig. 2.12
-41-
* Hl + P2 ' H2 + P3 (2.7)
(2.8)
A cualquier nivel: AP = P - P
AP = (2.9)
A nivel mínimo: H = O ; H
AP,Pl - P3 ' (2.10)
A nivel máximo: H = O ; H_
AP (Po . H_ - (2.11)
Amplitud de medida:
APh(2.12)
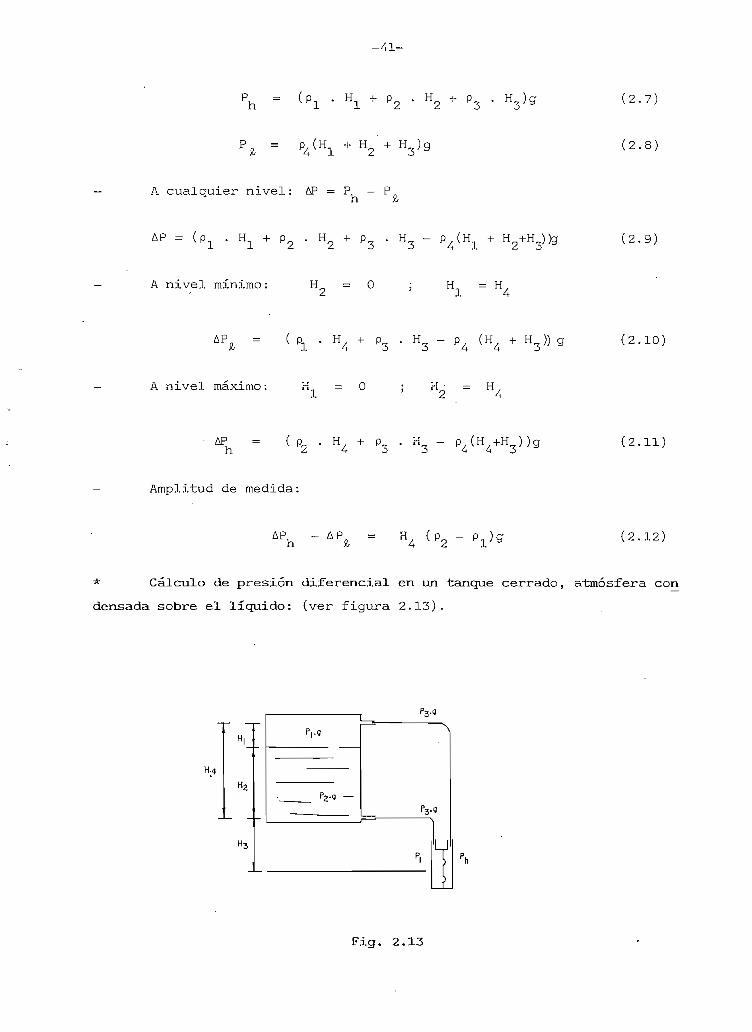
* Cálculo de presión diferencial en un tanque cerrado, atmósfera con
densada sobre el líquido: (ver figura 2.13).
H.4
P2.g —
P3.g
Fig. 2.13

-42-
A cualquier nivel:
A nivel mínimo: H = O
(2.13)
(2.14)
(2.15)
(2.16)
A nivel máximo: H = OH = H
AP
Amplitud a medida:
H H4(P3
= H4(P2 -
(2.17)
(2.18)
Para líquidos cuyos vapores son fácilmente condensables, la
tubería de la parte derecha del sensor (figura 2.13) ejercerá mayor
presión que la de la izquierda porque el vapor se condensa y llena
todo el tubo, la forma más simple de evitar este efecto es usar una
trampa de humedad (figura 2.14), en cuyo caso las ecuaciones que rigen
esta forma son las 2.7 a 2.12.
P4-Q
Fig. 2.14 : Sensor de presión diferencial con trampa de humedad.
-43-
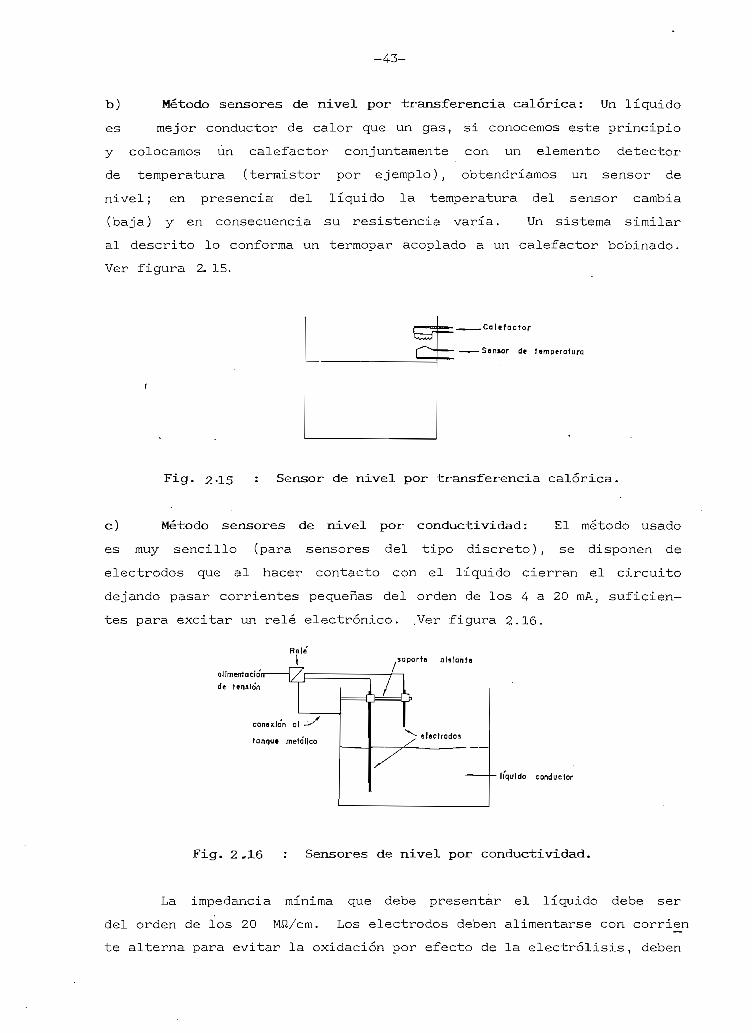
b) Método sensores de nivel por transferencia calórica; Un líquido
es mejor conductor de calor que un gas, si conocemos este principio
y colocamos un calefactor conjuntamente con un elemento detector
de temperatura (termistor por ejemplo), obtendríamos un sensor de
nivel; en presencia del líquido la temperatura del sensor cambia
(baja) y en consecuencia su resistencia varía. Un sistema similar
al descrito lo conforma un termopar acoplado a un calefactor bobinado.
Ver figura 2. 15.
.Calefactor
Sen»or de temperatura
Fig. 2-15 Sensor de nivel por transferencia calórica.
c) Método sensores de nivel por conductividad: El método usado
es muy sencillo (para sensores del tipo discreto), se disponen de
electrodos que al hacer contacto con el líquido cierran el circuito
dejando pasar corrientes pequeñas del orden de los 4 a 20 mA, suficien-
tes para excitar un relé electrónico. .Ver figura 2.16.
Helesoporte aislante
conexión al ¿sa'ljco
= j rj^ electrodos
/liquido conductor
Fig. 2.16 : Sensores de nivel por conductividad.
La impedancia mínima que debe presentar el líquido debe ser
del orden de los 20 Mft/cm. Los electrodos deben alimentarse con corrien
te alterna para evitar la oxidación por efecto de la electrólisis, deben

-44-
ser colocados verticalmente y sujetos por un soporte aislante. Si las —
paredes del tanque son de material conductor, pueden usarse éstas
para cerrar el circuito y así se utilizará un solo electrodo.
Para superficies líquidas turbulentas el control de nivel
en un punto s'e lo hace con dos electrodos separados a una pequeña
distancia vertical entre ellos, introduciendo así una "zona muerta"
y proveyendo una acción de control on-off.
d) Método sensores de nivel por capacidad: Se hacen uso de electro-
dos capacitivos que se introducen en el medio líquido, según las
características dieléctricas del líquido en mensión se obtienen dife-
rentes valores de capacidad de acuerdo al nivel. Los electrodos
sensores se hallan unidos a medidores especiales que dan una lectura
de la capacidad existente. Para líquidos de constante dieléctrica
alta y contenidos en un tanque metálico, se acostumbra usar un solo
electrodo. Ver figura 2.17-
A lo medición J.Cabezo metálicounida al tonque
L/
tanquemetálico
Cabeza
\
\
metálico
d j
-^^
A )o medición
— conductor interno
• — tonque aislante
__— orificio de entradadel ifquido
Fig. 2-tl7 : Sensores de nivel capacitivos: a) Electrodo
simple en un "tanque metálico; b) Electrodo en
forma coaxial Ji(t
e) Método sensores de nivel por radiación: En este método se hace —
uso de una fuente (F) y un detector (D) de rayos gamma, como se muestra
en la figura 2 • 18- La radiación se atenúa por absorción del líquido
y esto es lo que se detecta. Cuando la fuente se sitúa en el exterior
del tanque, la absorción de radiación de las paredes es constante,
y la de los gases y vapores es mínima, la radiación recibida por

-29-
Tablai.3: Constantes dieléctricas de distintas sustancias
SUBSTANCIA
Peróxido de hidrógeno
Agua
Soluciones aquosas
Acido fórmico
Glicerina
Glicol
Cloruro de benzoil
Etanol
Amoníaco
Dióxido de azufre
Triyoduro de antim.
Titanato de magnesio
Vidrio
Caucho neopreno
Cloruro de sodio
Resina alcalina
Azufre
Acido butírico
Poliestireno
Estireno
Benceno
Tetracloruro de carb .
Ciclohexano
Dioxido de carbono
Cloro
Propano
Argón
Nitrógeno
Aire
TEMPERATURA (°C)
0
25
-
15.6
25
25
0
25
25
0
175
25
-
24
25
25
118
20
25
25
25
25
25
20
- 50
0
, -191
-203
—
CONSTANTES DIELÉCTRICAS
84.2'
78.5
50 a 80
58.5
'42.5
37
29
24.3
16.9
15
13
13.9
3.7 a 10
6.6
5.9
5.1
3.52
2.97
2.6 •
2.43
2.27
2.22
2.015,V
i.'e2.1
1.61
1.53
1.454
1.0

CAPITULO II
"MÉTODOS DE DETECCIÓN DE NIVEL DE LÍQUIDOS"

-45-
el receptor está en relación Inversa a la ascensión del líquido en
el recipiente.
Entrado
Salida <="
CSs. ~T~~radio de radiación T
F = f u « n t e
D = detector
al regótro y control
amplificador
—fuonto
Fig. 2.18 : Sensor de nivel por radiación.
Puede existir una detección discreta al colocar receptores
a varios niveles (fig. 2.19.a), o ser de tipo continua (figura 2.39.b)
si se coloca una fuente en posición vertical para medir la atenuación
que es inversamente proporcional al nivel del líquido. La fuente
de radiación también puede montarse en un flotador especial; la atenua-
ción entonces es en proporción a la distancia fuente-detector.
JH.b)
LEÍ(c)
Fig. 2.19 : Sensores radioactivos:
b) Tipo continuo.
(d)
a) Tipo discritos;

-46-
La fuente utiliza elementos radioactivos como son Cesio, Cobalto
y Radio ( Cs, Co, Ra) . Cada elemento tiene un tiempo de vida
útil donde la radiación decrece exponencialmente con el tiempo.
El receptor puede ser un contador Geiger, que convierte la radiación
gamma recibida en una serie de pequeños pulsos de corriente, los cuales
van al circuito amplificador y son convertidos en pulsos de voltaje,
los que se transmiten al registrador y/o al elemento de control.
El receptor también puede ser una celda de gas ionizante, la cual
consta de dos electrodos contenidos en gases especiales, al recibir
radiación el gas se ioniza provocando que los iones positivos y negati-
vos sean atraídos respectivamente por los electrodos negativo y positi-
vo, como efecto de esto se produce una corriente eléctrica que es
luego amplificada y toma parte en las acciones de registro o control.
2.3 ANÁLISIS COMPARATIVO DE LOS MÉTODOS
El presente subtema tiene como finalidad resumir en un cuadro los
diversos tipos de métodos de detección de nivel (anteriormente menciona-
dos), en los que se incluye: la magnitud del campo de medida, la
precisión del método, la presión máxima de operación, la temperatura
máxima del fluido, tipos de fluidos a utilizarse, así como ventajas
y desventajas de cada método. Ver cuadro No. 2.1.

CAPITULO III
DISEÑO DEL SIMULADOR DE NIVEL DE LÍQUIDOS

CAPITULO III
DISEÑO DEL SIMULADOR DE NIVEL DE LÍQUIDOS
Este capítulo tiene como finalidad el diseno de un simulador
de nivel de líquidos, el cual estará dotado de varios tipos de transduc-
tores que recogerán la variable nivel y la convertirán en señales
eléctricas apropiadas para la medición y control del proceso.
3.1 DIAGRAMA DE BLOQUES GENERAL
En la figura 3.1 consta en diagrama de bloques, el diseño
general del simulador de nivel. A continuación explicaremos cada
una de sus partes:
— Bloque 1 : "Módulo de pruebas" : está destinado a la experi-
mentación de las variaciones de nivel, al módulo se acoplarán transducto-
res de varios tipos, como son: capacitivo, de resistencia variable,
presión, conmutador flotante y conductivo. Para producir cambios
de nivel se dispondrá de dos cabezales de bomba acoplados a un motor.
— Bloque 2 : "Módulo de acoplamiento y control de señal" :
este módulo tiene como objeto el recoger y procesar las señales prove-
nientes de los transductores para su acople respectivo con circuitos
de medición y control.
— Bloque 3 : "Módulo de medición y fuentes" : Las señales
procesadas del segundo módulo serán mostradas en forma digital y análogaj-48-

-49-
mediante displays y escala análoga, así las variaciones de nivel podrán
ser cuantificadas. Adicionalmente en este módulo se ubicarán las
fuentes de suministro eléctrico para el funcionamiento de todo el
equipo.
El diagrama de bloques anterior describe en forma general
el simulador en mención, a continuación identificaremos más detallada-
mente sus partes (ver figura 3.2).
Como puede observarse en la figura, el centro de operaciones
lo constituye la variable nivel, mediante un sistema de bombeo y/o
perturbaciones ,en la superficie del mismo, se pretende sensar los
cambios producidos mediante dos tipos clásicos de transductores:
los de tipo continuo (capacitivo y resistivo) y los de tipo discreto
(conductivo, presión y flotación switch). Con los transductores tipo
continuo podremos obtener señales a lo largo de todo el rango de la
variable nivel del líquido, las mismas que para su interpretación
y utilización deberán pasar por circuitos de acoplamiento, medición
y control. Con los transductores tipo discreto se conseguirán señales
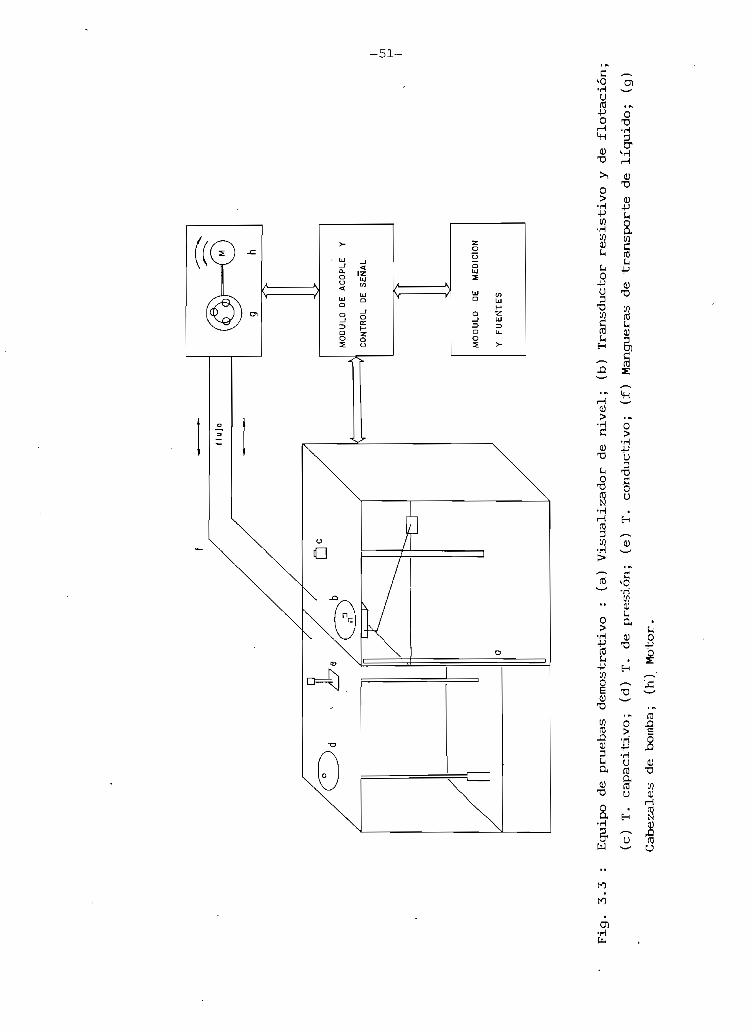
tan sólo en uno o varios puntos del rango. En la figura 3.3 puede
observarse más claramente el equipo.
3.2 DISEÑO DE TRANSDUCTORES
Para diseñar un tranductor es necesario partir de condiciones
conocidas. Las primeras condiciones a tomarse en cuenta deberán ser:
tipo de transductor (continuo o discreto), principio de funcionamiento,
características físicas y químicas del medio en que va a operar, rangos
de medida y de operación, etc.
En cada uno de los diseños detallaremos estos y otros puntos,
se hará un diagrama de bloques y se justificarán los circuitos de
acople, control y medición.
Cabe anotar que para motivos de pruebas y demostraciones todos
los sensores operarán con un solo tipo de líquido, por razones de
simplicidad se ha escogido agua potable, aclarando que esto no implica

-50-
O © ©MODULO DE
PRUEBAS< :
MODULO DE ACOPLA-
MIENTO Y CONTROL
DE SEÑAL
1* J
MODULO DE MEDÍ —
CION Y FUENTES
Fig. 3.1 : Diagrama de bloques general.
VISUALIZADOR DE
N I V E L
(Tubo comunícenle)
VARIACIÓN DE
NIVEL
BOMBEO Y/O PERTURBA
CION DEL LIQUIDO
TRANSOUCTOR
CAPACITIVO
(Continuo)
TRANSOUCTOR
RESISTIVO
(continuo)
TRANSDUCTOR
CONDUCTIVO
{ Discreto)
TRANSDUCTOR
DE PRESIÓN
( Dlacr í to)
TRANSDUCTOR
DE FLOTACIÓN
( D iscre to)
CIRCUITERIA DE
ACOPLE, MEDICIÓN Y
CONTROL DE SEÑAL
MEDIDORES ANÁLOGOS
Y DIGITALES
CONTROL BOMBA
Fig. 3.2 : Diagrama de bloques del sistema.
flu
jo
Ü<
MO
DU
LO
DE
A
CO
PLE
Y
CO
NTR
OL
DE
SE
ÑA
L
(Jl
H I
MO
DU
LO
D
E
Y F
UE
NT
ES
ME
DIC
IÓN
Fig. 3.3 : Equipo de pruebas demostrativo : (a) Visualizador de nivel; (b) Transductor resistivo y de flotación;
(c) T. capacitivo; (d) T. de presión; (e) T. conductivo; (f) Mangueras de transporte de líquido; (g)
Cabezales de bomba; (h') Motor.
-52-
que no pueda utilizarse otros fluidos.
Las características físicas y químicas más sobresalientes
del agua se resumen en la tabla No. 3.1 En el anexo F se adicionan
características para otros líquidos.
Tabla 3.1 : Características físicas y químicas del agua potable
Densidad
Tensión superficial
(agua — aire)
Conductividad
Constante dieléctrica
Viscosidad
Sales disueltas
19 m / cm3 20 °C
73 ergios/cm 20 C
—5 2Mayor a 2.1 x 10 /m
- 80
0.0102 poise 20 °C
CINa, Sales de Ca,
Sales de Mg, etc . "
Con propósitos de medición, pruebas y determinación de caracterís
ticas escogeremos un rango máximo de O a 25 cm de nivel de líquido,
los rangos de operación de los circuitos electrónicos serán + 5 Vdc, + 15
Vdc, las señales de información hacia medidores se transmitirán en el ran
go de 4- a 20 mA.
3.3 DISEÑO DEL TRANSDUCTOR CAPACITIVO
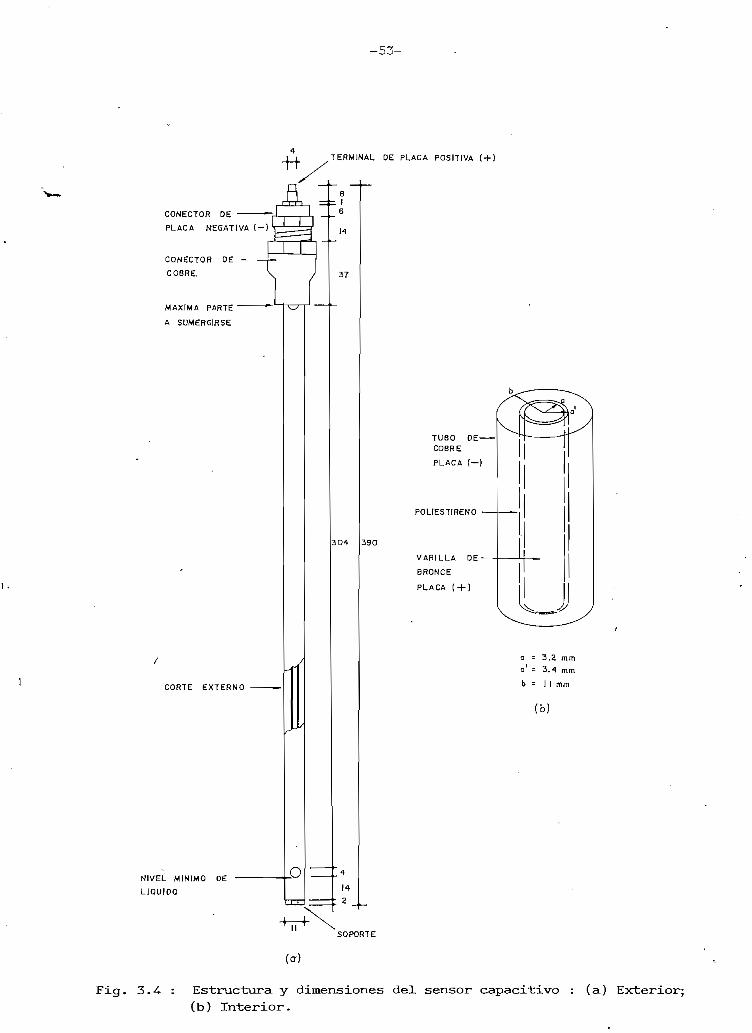
De acuerdo a los requerimientos anteriormente citados, se
construyó un sensor de las dimensiones y estructura de la figura 3.4.
-53-
TERMINAL DE PLACA POSITIVA ( + )
PLACA NEGATIVA (-) '|J J-J
1
CONECTOR DE U
COBRE. X.
MÁXIMA HAHIh
A SUMERGIRSE
CORTE EXTERNO •-
LIQUIDO
y
Jí/
0
V
816
14
37
304
"4
14
- 2
TUBO DE — -COBRE
PLACA (— )
VARILLA DE
BRONCE
PLACA (+)
1
|l
1
•
i
I1
1
a = 3.2 mm
a = 3.4 mm
(b)
Fig. 3.4
(a)
Estructura y dimensiones del sensor capacitivo(b) Interior.
(a) Exterior;

-54-
3.3.1 CALCULO DE CAPACITANCIA TOTAL
Puesto que el agua potable contiene sales en disolución} este
líquido actuará como conductor mas no como dieléctrico. Por esta
razón (ver figura 3.4.b) se ha forrado el conductor interior (bronce)
con una capa de poliestireno. Calculemos el valor máximo de capacitan-
cia cuando el líquido llegue a 25 cm:
Para un capacitor cilindrico coaxial, la capacitancia por
unidad de longitud viene dada por (3):
0.2416 £F [ pF/cm] (3.1)
log (b/a)
Donde:
E = constante dieléctrica relativa al airer
a y b = dimensiones
Datos:
£ poliestireno '= 2.6
a = 3.2 mm
b = 3.4 mm
Cálculo:
0.2416 (2.6)pF/cm
log (3.4/3.2)
C = 23.86 pF/cm
Para una altura máxima de nivel de agua de 25 cm, se obtendrá
una capacitancia máxima de:
C , = 597 pFmax
-55-
3.3.2 RESULTADOS OBTENIDOS
Mediante pruebas de laboratorio utilizando agua potable, se
estableció la característica del transductor capacitivo. Por medio
de un medidor de capacitancias se pudo determinar la relación altura
de nivel del líquido vs. valor de capacitancia equivalente. Los resul-
tados obtenidos de las pruebas constan en la figura 3.5.
3.3.3 CIRCUITOS DE ACOPLE Y MEDICIÓN
De la característica, estática obtenida, se deduce que para
un mismo cambio de nivel se obtiene una misma variación de capacitancia,
de esta forma la linealidad obtenida simplifica los circuitos eléctricos
de acoplamiento puesto que no será necesario las correcciones de lectura.
La figura 3.6 explica en- diagrama de bloques los circuitos
de acople del transductor capacitivo, se trata básicamente de un medidor
electrónico digital, el que dará lecturas de nivel en todo el rango
del sensor mediante variaciones de escala de 00 a 99. En muchas ocasio-
nes tan sólo es necesario que la altura de nivel del líquido se presente
visualmente en forma análoga, para lo cual se ha dispuesto una escala
e indicador de estado de nivel.
La variación de capacitancia del sensor es traducida en variacio-
nes de ancho de pulso por medio de los circuitos monoestables y combina-
cional, la señal obtenida ( At ) servirá para habilitar el paso de
pulsos de reloj hacia los contadores, en cuyas salidas se dispondrá
de un código BCD que deberá ser decodificado y retenido para la lectura
en los displays.
3.3.4 CIRCUITOS MONOESTABLES
La capacitancia equivalente del sensor es proporcional al
5 pulso t dac
en la siguiente forma:
ancho de pulso t dado por el monoestable 1 y cuyos límites se definen

Spiros

-57-
t, . < t. < t_ ,1 min 1 1 max
. .1 min
R_C1 .1 1 min
(3.2)
i -1 max -, -1 max (3.3)
Donde:
1 mines la capacitancia mínima de C , o el valor mínimo
de capacitancia equivalente del sensor en ausencia
del líquido.
í_ = es la capacitancia máxima de C.. o el valor máximo1 max 1de capacitancia equivalente del sensor en el máximo
nivel del líquido.
El monoestable 2 produce un pulso de ancho fijo sincronizado
con el disparo del monoestable 1. El valor del pulso fijo está dado
por:
t1 min
(3.4)
El circuito cornbinacional da la diferencia de señales A t, ,h f
definida como:
A t. (3 .5)
Donde:
O .¿ A t, (t f - t. . )h >jmax 1 min
Si deseamos obtener una lectura (en el display) que varíe
de 00 a 99, entonces definimos la siguiente correspondencia:
At. = 0 Para una lectura de 00
At = (t — t )Para una lectura de 99h max 1 rrék 1 min

-58-
En tanto la señal At permanezca en alto (1T), los pulsosn i_ide reloj provenientes de un oscilador de 4 Mhz pasarán por la compuerta
NAND hacia los contadores, incrementando el estado de éstos. De esta
forma para un ancho de pulso máximo deberán pasar 99 pulsos de reloj,
veamos:
fo 99 ciclos
Ath máx
4 Mhz (3.6)
Despejando At, , obtenemos:^ J h max
At.h máx
24.8 us
La figura 3.7 muestra los circuitos monoestables acoplados
con el transductor (T ), conjuntamente con los de sincronismo de señales.
Se ha escogido el IC MC14538 por contener dos circuitos monoestables
de precisión} cuyo ancho de pulso t está definido por la constante
RC que se escoja:
RC (3.7)
Donde:
t
R
C
duración del pulso monoestable en seg
resistencia en ohmios ( ti )
capacitancia en faradios (F)
Calculemos:
t1 máx ( P _ + R . ) C. ,1 1 1 m a x
CT máx'(3 .8 )
1 mimin R , ) c_ .1 1 min
Rl) (C1 + C T m i n > (3 '9 :

-59-
Fig. 3.6 : Diagrama de bloques de los circuitos de acople y medición
del transductor capacitivo.
CIRCUITO DE
SINCRONIZACIÓN
C I R C U I T O
COMBINAC10NAL
OSCILADOR 4Mhz
Ath
Jl
JT
Fig. 3.7 : Circuitos monoestables y sincronismo de señales.

-60-
Donde:
C , = capacitancia máxima del sensor a 25 cm de aqua (600T max ^ a
pF)
C . =3 capacitancia mínima del sensor a O cm de aaua (262T mxn ^ a
pF)
Reemplazando la ecuación 3-8 y ecuación 3.9 en la ecuación 3.5 ob
tenemos:
A t , = (P- . + FL) (C. , C_ . ) (3.10)h max 1 1 t max - T min
Despejando y reemplazando valores obtenemos:
(p + Rn) = 73,2 K (3.11>
Escojamos para C un valor en el orden de C . ;J ^ 1 T min
C = 280 pF
Ahora bien:
(3.12)
Para cumplir con la ecuación 3.4 hagamos que C se aproxime a:
c ~ (r j. r 1° n ~ \^1 + ^T- m^ _ /¿. J. 1 niin
C2 - 542 pF
Escojamos:
C = 470 pF
Igualando la ecuación 3.12 y ecuación 3.4 y luego despejando ob
tenemos:

-61-
P + R = — — -2 2 C2
Reemplazando valores:
?2 + R2 = 84.4 K (3.13)
Definamos valores para cumplir con las ecuaciones 3.11 y 3.13:
PI = P2 = 20 K
R = 62 K
R 68 K
Reemplazando valores en las ecuaciones 3.8 y 3.9 obtenemos:
t_ , = 64.4- us (3.14)1 max VJ.A-+/
tn . = 39.7 us (3 15)1 min \¿.±oj
De esta forma aproximadamente se cumple:
A t 24.7 us (3.16)
3.3.5 CIRCUITO COMBINACIONAL
La finalidad de este circuito es proporcionar una diferencia
de ancho de pulso At, , para esto la señal t debe restarse de t, .h' 2 1
Esto podemos lograrlo mediante dos compuertas NAND 74HCOO. La figura
3.8 muestra los diagramas de tiempo, tabla de verdad, mapa K y circuito
combinacional requerido.
3.3.6 OSCILADOR
Para .dar una precisión al medidor es indispensable que los
pulsos de oscilación no varíen, es decir la frecuencia de oscilación
-62-
permanezca constante. Esto podemos lograrlo mediante dos compuertas NAND
74LSOO, un par de resistencias y un cristal de 4 Mhz (ver figura 3.9).
3.3.7 CIRCUITO DE SINCRONIZACIÓN
De acuerdo al número de pulsos ingresados al contador, se
tendrá un código BCD respectivo, dicho código pasará por un decodificador
a 7 segmentos para dar una lectura en los displays. Las señales de
borrado y conteo (MR) , así como las de habilitación y retención (LE)
necesarias en los contadores y retenedores respectivamente > deben estar
perfectamente sincronizadas. Para la presente tesis se ha optado
por el contador dual decádico de 4 bits 74HC390 y los decodificadores-re-
tenedores a 7 segmentos MC14511. La figura 3.10 muestra el circuito
requerido, mientras que en la figura 3.11 se detalla el diagrama de
tiempos -
La Salida Q del monoestable 1 se halla unida a una red integra-
dora R-^C j (5ue trabajando conjuntamente con la salida complemento
Q y una compuerta NAND da un pequeño pulso LE para el paso de datos de
los contadores a la salida de los decodificadores. El pulso deberá
tener un valor mínimo de 520 nseg de acuerdo a las especificaciones
del IC MC14511. Con R = 560 tt y C = 0.01 uF esta condición
queda superada.
El pulso de borrado y habilitación MR de contadores, puede
obtenerse a través de redes diferenciadoras RC y compuertas NAND 74HCOO.
Escogiendo C = C = 0.01 uF y R = R = 1K, se cumple satisfac-
toriamente con lo requerido. Para evitar oscilaciones de lectura
en el display, la señal de disparo de monoestables D está sincronizada
con la señal C del oscilador (ver figura 3.7).K.
3.3.8 INDICADOR ANÁLOGO
La finalidad del medidor análogo en proyecto es dar un indicati-
vo visual de la altura de nivel. El rango de medición se dividirá
en pasos discretos los cuales podrán ser detectados, por el encendido
y apagado de un conjunto de 8 leds. La figura 3.Í2 muestra en forma

-63-
flth
( o )
01
01
0
0
1
1
02
0
1
0
1
F
0
0
0
[
0
0
0
o 02 o
1
IC3 \ IC3
/4 74HCOO 1/4 74H
íc) (d-)
Fig. 3.8 : Diseño del circuito combinacional: (a) Diagrama de tiempos;
(b) Tabla de verdad; (c) Mapa K; (d) Circuito combinacional
requerido.
4 Mhi
R7
1/4 74LSOO 1/4 74LSOO
Fig. 3.9 : Oscilador de -4 Mhz.
Fig. 3.10 : Circuito de sincronización.

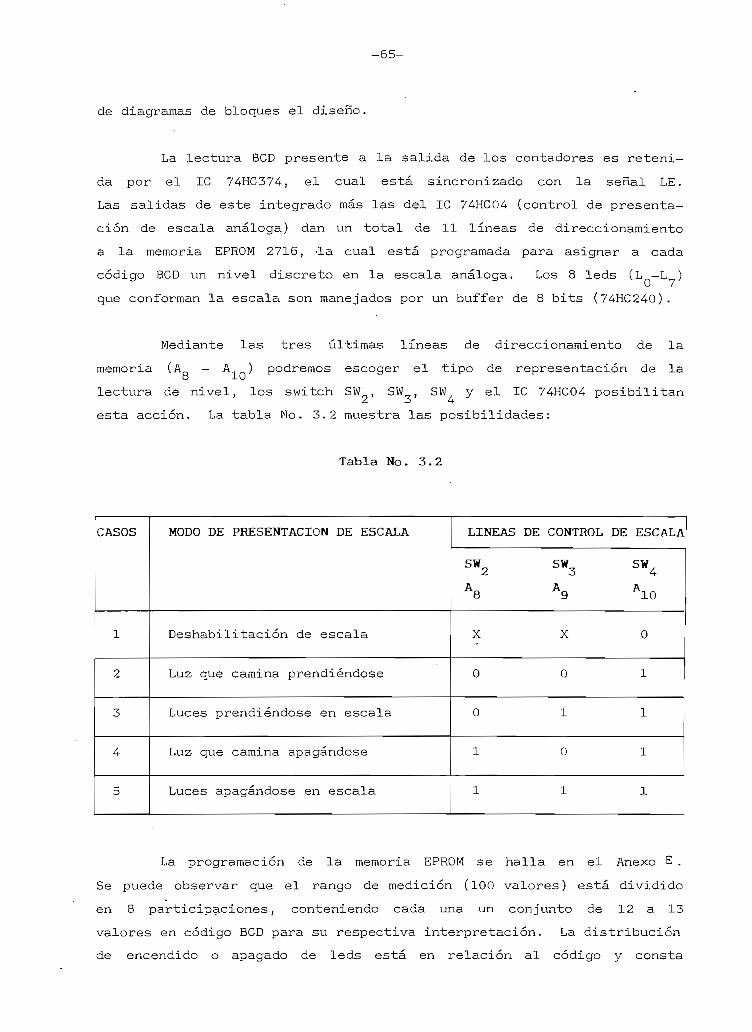
-65-
de diagramas de bloques el diseño.
La lectura BCD presente a la salida de los contadores es reteni-
da por el IC 74HC374, el cual está sincronizado con la señal LE.
Las salidas de este integrado más las del IC 74HC04 (control de presenta-
ción de escala análoga) dan un total de 11 líneas de direccionamiento
a la memoria EPROM 2716, -la cual está programada para asignar a cada
código BCD un nivel discreto en la escala análoga. Los 8 leds (L -L )
que conforman la escala son manejados por un buffer de 8 bits (74HC240).
Mediante las tres últimas líneas de direccionamiento de la
memoria (A0 - A_rt) podremos escoger el tipo de representación de lao J.U
lectura de nivel, los switch SW0, SW_, SW. y el IC 74HC04 posibilitan¿ ó 4-
esta acción. La tabla No. 3.2 muestra las posibilidades:
Tabla No. 3.2
CASOS
1
2
3
4
5
MODO DE PRESENTACIÓN DE ESCALA
Deshabilitación de escala
Luz que camina prendiéndose
Luces prendiéndose en escala
Luz que camina apagándose
Luces apagándose en escala
LINEAS
SW2
A8
X
0
0
1
1
DE CONTROL
SW3
A9
X
0
1
0
1
DE ESCALA
sw
Aio
0
1
1
1
1
La programación de la memoria EPROM se halla en el Anexo E .
Se puede observar que el rango de medición (100 valores) está dividido
en 8 participaciones} conteniendo cada una un conjunto de 12 a 13
valores en código BCD para su respectiva interpretación. La distribución
de encendido o apagado de leds está en relación al código y consta

-66-
en la tabla No. 3,3, así por ejemplo el led L permanecerá prendido
o apagado (según el tipo de presentación de escala) para un rango
de O a 11 en código BCD.
Tabla No. 3.3
PARTICIÓN
1
2
3
4
5
6
7
8
LED ACTIVADO
L,0
Ln1
Lo2
L,3
L.4
Lc5
Lc6
Lv7
CORRESPONDENCIA
0 -
12 -
25 -
37 -
50 -
62 -
75 -
87 -
CÓDIGO BCD
11
24
36
49
61
74
86
99
3.3.9 INDICADOR DE ESTADO DE NIVEL
El diagrama de bloques de la figura 3.13 muestra el indicador
de estado de nivel. El centro de este circuito lo constituye un conjun-
to de 2 comparadores digitales de 8 bits MC14585, los cuales dan un
indicativo del nivel del líquido dado por A - A en referencia a
un estado de cuenta definido manualmente porO 7
Las salidas del comparador digital (A < B, A = B) puede
acoplarse a circuitos de control del proceso; aquí únicamente se las
utiliza para manejar a 3 leds: I , I , I , e indicar cuando el nivelo JN o
del líquido supera, es igual o es menor respectivamente, al nivel
de referencia fijado manualmente..

-67-
CONTROL DE PRE-
SENTACIÓN DE ESCA-
LA ANÁLOGA
SW2 / SW3 / SW4
Fig. 3.12 : Diagrama de bloques del medidor análogo.
LE
C IR CULTO
COM B I N A C I O N A L
Fig. 3.13 : Diagrama de bloques del circuito indicador de estado de nivel,

-68-
En el anexo B, diagramas 1 y 2 constan los diseños circuitales
completos del sensor capacitivo.
3.4- DISEÑO DEL TRANSDUCTOR RESISTIVO
De acuerdo a las características expuestas al inicio del capítulo
se buscó en el mercado local el elemento sensor más aproximado a dichas
condiciones. La figura 3.14 muestra la estructura y dimensiones del
sensor.
3.4.1 RESULTADOS OBTENIDOS
Mediante pruebas de laboratorio se llegó a determinar la caracte-
rística estática del transductor resistivo. Como puede observarse
en la figura 3.l4.b este transductor no es más que un' potenciómetro
el cual varía su resistencia en función directa de la altura de nivel
del líquido, para ello cuenta con un flotador y un brazo de palanca
los que desempeñan la función de transmisores de movimiento. Mediante
un multímetro digital se llegó a determinar la característica estática:
altura de nivel vs. resistencia, los valores obtenidos constan en
la figura 3.15.
3.4.2 CIRCUITOS DE ACOPLE Y MEDICIÓN •
Al observar la característica estática de este transductor
puede notarse una aparente linealidad, las desvÉciones en su caracterís-
tica se deben exclusivamente a pequeñas deficiencias en su construcción.
Notar que la varilla transmisora del movimiento de nivel describe
un desplazamiento circular, si a cada grado de giro de la varilla
hiciéramos corresponder un determinado valor de resistencia (y si
la variación fuera constante) la característica estática (altura vs.
resistencia) obtenida arrojaría una no linealidad inminente, si en
cambio la correspondencia entre el movimiento de la varilla y la varia-
ción de resistencia fuera no lineal compensatoria (como en realidad
sucede) obtendríamos lo ya representado en la figura 3.15.
En la figura 3.16 consta en diagrama de bloques los elementos

-69-
ESCOBILLA DE
CONTACTO
BASE PAR A EL MONTAJE
. CONTACTOS
EJE
C A J A METÁL ICA
VARILLA,
NIVEL MÁXIMO
HILO RESISTIVO
C b )
FLOTADOR
27 cm
ÁNGULO DE GIRO = 60°
NIVEL MÍNIMO
Fig. 3.14 : Estructura y dimensiones del sensor resistivo: (a) Exterior;
(b) Interior.

^D^^Sittej oBóeo^^r

-71-
constitutivos del transductor resistivo.
Las variaciones de resistencia obtenidas a la salida del sensor
producto de los cambios de nivel son convertidas en el puente de Wheats-
tone en variaciones de voltaje, para que esta señal pueda ser utilizada
deberá ser amplificada convenientemente. La señal obtenida hasta
este punto es de naturaleza análoga, se acopla a ella un medidor análogo
y un conversor voltaje-frecuencia (V/F), la- parte que sigue es el
medidor digital constituido por los contadores, retenedores, decodifica-
dores, displays a 7 segmentos, muestreador y sincronizador de señales.
3.4.3 PUENTE DE WHEATSTONE
Para el diseño debe tomarse en cuenta los valores máximos
y mínimos de resistencia del sensor, en la curva característica puede
observarse que para una altura de nivel de agua de 25 cm .y O cm les
corresponden resistencias de 15.6Í2 (T ) y 91.4 £2 (T__ ) respectivamente.RH RL
Con el valor de resistencia mínimo fijaremos la corriente máxiire por
el ramal 1 de la figura 3.17.
Escojamos:
_ 5 mA1 max
Entonces:
(RE_0 + TQU) I , = Vcc (3.17)52 RH 1 max
R52 = - TRH1 máx
Reemplazando valores en la última ecuación, obtenemos:
R52 = 1 K
Si al otro lado del ramal colocamos un potenciómetro P = .100 Í2
fijado a 91.4ÍÍ , más una resistencia R53 = 1K, entonces cuando el lí-
-72-
quido esté al nivel mínimo el "transductor presentará una resistencia —
T = 91. 4 ñ y el puente entrará en equilibrio (V = O V) .RL 21
Obtengamos ahora la diferencia máxima de voltaje entre los
dos ramales del puente :
V2 1K
vi ° IK f 15.e' ' 15'6í2 = °-0768V
V , = V - V21 max 2 1 min (3.19)
Reemplazando valores obtenemos:
V0_ , = 0.342 V21 max
3.4.4 AMPLIFICADOR DIFERENCIAL
Por su linealidad y alta inmunidad al ruido se escogió el
amplificador operacional NE5534A, el cual se configurará como un amplifi-
cador diferencial con ganancia de 11.7 y con una impedancia de entrada
suficientemente alta como para no perturbar al puente (ver figura
3.18).
La amplificación del circuito se define como:
% • "57 + P4= — = R56
Despejando V obtenemos:
^ - = A. V^O max 21 max . (3.21)
Reemplazando valores se tiene:
V 4 Vo max
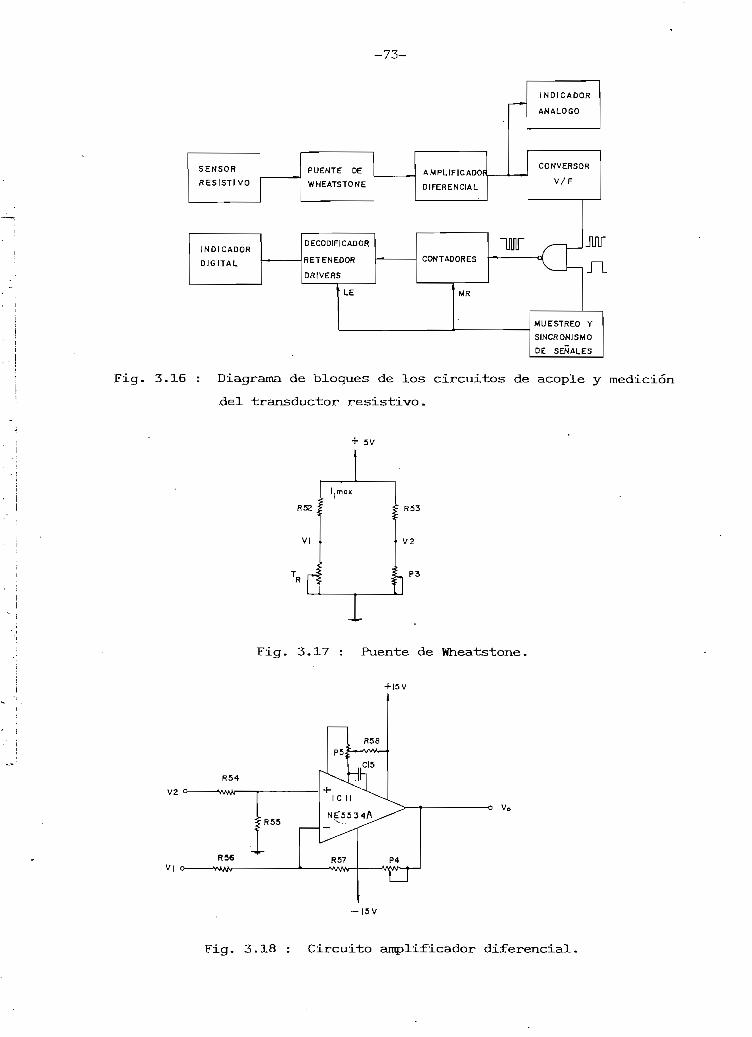
-73-
Fig- 3.16 : Diagrama de bloques de los circuitos de acople y medición
.del "tr ans ductor resistivo.
V]
R53
• V2
P3
TFig. 3.17 : Puente de Wheatstone.
+ I5V
— I5V
Fig. 3.18 : Circuito amplificador diferencial.

-74-
Luego el rango de variación a la salida del amplificador diferen-
cial es de OV a 4V.
Para cumplir con la amplificación A = 11.7 se escoge:
R_^ ~ 100 KD /
P. ~ 10 K4
Rcc = 9. 1 K56
3.4.5 CONVERSOR V/F, CIRCUITOS DE MUESTREO Y SINCRONIZACIÓN -
El conversor V/F (ver figura 3.19) es el encargado de fijar
una determinada frecuencia para un valor fijo de voltaje en su entrada,
por su precisión se escogió el IC AD537, el cual rige su funcionamiento
por la siguiente expresión matemática:
(3.22)10(R6! + V
donde:
- „ oR61 + P6
(3-23)
Si escogemos I. = 1 mA} y puesto que Vin = 4 V, se deduce de
la ecuación 3.23 lo siguiente:
Escogemos:
R + P = 4 K61 6
R51 = 3.3 K
Pc 1 K6
Si fijamos fo = 10 Khz para Vin = 4V, entonces despejando -

-75-
C de la ecuación 3.22 y reemplazando valores obtenemos:
C = 0.01 uF
Entonces se tendrá que para una variación del voltaje de entrada
en el rango de OV a 4-V, se obtendrá a la salida del conversor V/F
una variación de frecuencia de O a 10 Khz.
El potenciómetro P ajusta la escala, mientras que el P ajusta
el offset. Las resistencias R,-q) Rfín y el condensador C forman
parte de un filtro, el cual reduce notablemente variaciones bruscas
de voltaje a la entrada. D es un diodo Schottky (1N6263) el cual
protege al integrado de tensiones de entrada negativas. Finalmente
na re
conversor V/F.
R es una resistencia del pull-up para el transistor de salida del
El número de pulsos C^i(ver figura 3.20) que pasan al contador
dependen de la frecuencia fo y del tiempo de muestreo T.., así paraH
el caso extremo se tendrá:
-. 99 ciclos _ „ ... . „..fo = • = 10 Khz (3.24)
H
Despejando obtenemos: T = 10 m segH
Utilizando el IC MC14-538 (circuito monoestable) y una R = 100 K
(R,-.- + Pn = 100 K) , obtenemos por reemplazo el valor de C_ _ de la ecua65 o 19 —
ción 3.7:
Clg = 0.1 UF
El circuito de sincronización de señales (figura 3.21) es
el encargado del borrado y habilitación de contadores (MR), habilitación
y retención de decoficadores (LE), desempeña funciones similares al
circuito de sincronismo del transductor capacitivo.
El diagrama de tiempos de la figura 3.22 explica en mejor
forma el diseño.

-76-
-M5V
Fig. 3.19 : Conversor voltaje—frecuencia.
pe
CI9 =±=
J1T
_TL
ir
CIRCUITO DE
SINCRONIZACIÓN
LE
Fig. 3.20 : Circuito muestreador de señales.

-77-
3.4. 6 INDICADOR ANÁLOGO
El IC LM3914 (figura 3. 23) es un integrado que compara la
señal análoga de entrada (V ) con 10 niveles fijos de voltaje repartidos
uniformemente sobre el rango de OV a 4V, iluminando una escala de
10 leds sin la necesidad de resistencias. La corriente a través de cada
led puede ser programada, y es aproximadamente 10 veces la corriente
drenada por el pin 7. Internamente el integrado posee una referencia
de voltaje para fijar mediante resistencias el rango de operación
de escala , veamos :
R70Vout = Vref (1 + R + PQ > + *AX ' «70 (3'25>by y
Datos:
V ^ = 1.25 Vref
R?0 - 3.3 K
R69 + P9 =" 1-76 K
I = 120 u A
Reemplazando los datos anteriores en la ecuación 3.25 obtenemos:
v 4. = 4 Vout
Luego el rango de operación de escala es de OV a 4V, y la
corriente en cada led aproximadamente es:
I, , = 10-•led " R_9 + Pg (3.26)
Reemplazando datos obtenemos:
I. , = 7.1 mAled
Una de las características del LM3914 es la de poder controlar la

-78-
01 o
LEo -f-5V -f-5V
•o MR
Fig. 3.21 : Circuito de sincronización de señales.
-M5V
R70
Fig. 3.23 : Indicador análogo del transductor resistivo.

Soiros
-80-
modalidad de presentación de escala. Este integrado posee a través
del pin 9 comparadores que detectan el voltaje aplicado y cambian
la presentación de escala a dos tipos de modalidad: de puntos y de
barra. Los límites están dados de la siguiente forma:
Cuando
V . (Vcc - 20 mV) modalidad de barrapin 9
V . (Vcc - 200 mV) modalidad de puntospin 9
Claramente se puede observar en la figura 3.23 que cuando
SW cambia de la posición 1 a la 3, la escala cambia de la modalidad
de punto a la barra. El circuito conformado por Q , D y las resisten-
cias adjuntas simulan una alarma de nivel máximo. Cuando SW esté
en la posición 2 y el nivel del líquido llegue a la altura máxima
de agua (25 cm) , la escala pasará automáticamente de la modalidad
de puntos a la de barra, indicando con esto que se ha llegado al nivel
máximo.
En el anexo B , diagrama 3 y 4 constan los diseños circuítales
completos del sensor resistivo.
3.5 DISEÑO DEL TRANSDUCTOR CONDUCTIVO
De acuerdo a las características del líquido (agua potable)
y las dimensiones del recipiente, se diseñó el sensor de la figura
3.24. Cabe señalar que el recipiente es de material aislante (vidrio)
y para poner en funcionamiento al sensor, se ha escogido como segundo
electrodo al conductor externo del sensor capacitivo, el cual está
puesto a tierra.
3.5.1 CIRCUITOS DE ACOPLE
Los electrodos del sensor se unen al IC LM1830, el cual es
un circuito integrado monolítico diseñado para usarlo en la detección
de fluidos de sistemas. El circuito es ideal para detectar la presencia,
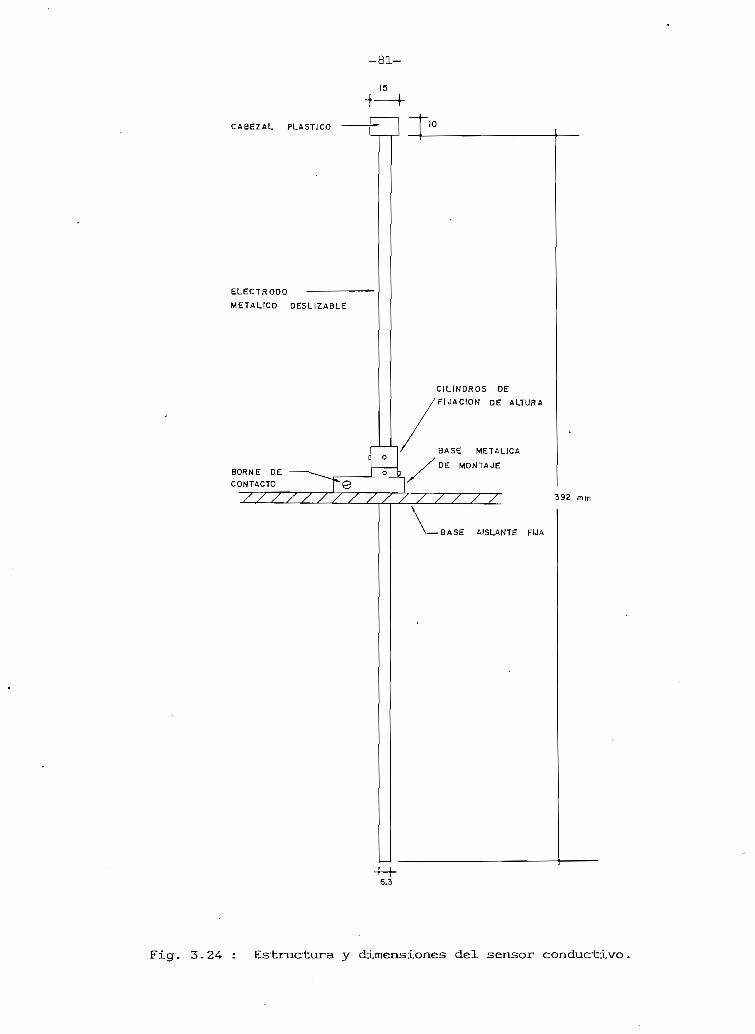
CABEZAL PLÁSTICO
ELECTRODO •
METÁLICO DESLIZABLE
CILINDROS DE
'FIJACIÓN DE ALTURA
BASE METÁLICA
DE MONTAJE
39Z mm
-BASE AISLANTE FIJA
6.3
Fíg. 3.24- : Estructura y dimensiones del sensor conductivo,

-82-
ausencia, o nivel de agua u otros líquidos polares.
Como se indica en el diagrama de bloques de la figura 3.25,
la señal de salida del oscilador pasa por un condensador de filtro
para librarse de la componente DC. La señal alterna es entonces aplicada
a los electrodos, y mediante un detector de caída de voltaje se determina
la presencia o ausencia de fluido por comparación de la resistencia
entre los electrodos y la resistencia interna del integrado.- La salida
del detector es amplificada para manejar algún tipo de dispositivo
externo.
3.5.2 OSCILADOR Y FILTRO
El LM1830 (ver figura 3.26) requiere sólo de un capacitor
externo para completar el circuito oscilador. La frecuencia de oscila-
ción es inversamente proporcional al valor del capacitor externo.
Usando un capacitor C = O - 01 uF, la frecuencia de salida es aproxima-
damente 5 Khz. La salida del oscilador está en el pin 5, pero en
aplicaciones normales la salida se toma del pin 13 para que la resisten-
cia interna 13K pueda ser comparada con la resistencia de los electro-
dos . El pin 13 es acoplado a los electrodos a través de un capacitor
de bloqueo para filtrar la señal de DC, en nuestro caso se usa un
°27 = °'01 UF'
3.5.3 DETECTOR DE CAÍDA DE VOLTAJE
Apenas la amplitud de salida del oscilador sea 4 V el detectorBE
Qd (el cual es una juntura base-emisor) cambiará a encendido (ON)
cuando la resistencia a tierra de los electrodos sea igual a la resis-
tencia interna de 13K. Un diodo D . interno a través de la junturad -Jbase emisor, provee una limitación simétrica de la señal de entrada
al detector para que los electrodos sean excitados con + 2 V desde una— Be.
resistencia de 13K.
El colector del transistor detector es llevado fuera a través
del pin 9 facilitando la conexión de un capacitor de filtro externo
(°oo = 15 uF)> para que la salida swichee a "ON" u "OFF" dependiendo2o

-83-
OSCILADOR
5 Khz
FILTRO DC ELECTRODOSDETECTOR
DECAÍDA OE
VOLTAJE
Fig. 3.25 : Diagrama de bloques del transductor conductivo,
Salido Solida
Oscilador Ose. Reí.. c
13
Entrada Capacitor Salido a
detector filtro colector abierto
Cl GND
Fig. 3.26 : Diagrama circuítal del IC LM1830
•H5V + I5V+ I5V
C26
I5V
Fig. 3.27 : Circuitos de acople del transductor conductivo.

tiniutr:::
: búa - :
-85-
de la resistencia de los electrodos.
3.5.4 CIRCUITO AMPLIFICADOR
La figura 3.27 muestra el circuito externo del LM1830. Al
colector del transistor de salida del integrado se le debe conectar
una resistencia de pull-up, con un valor de R = 3.3 K se limita
la corriente a 4.5 mA. La señal de suicheo presente en el pin 12
es acoplada a la base del transistor Q , cuando éste se satura maneja4
un relé de impedancia 200 fi . Al igual que Gf el transistor Q_ se4 5
corta y se satura al mismo tiempo manejando al led L . En resumenL»
cuando el nivel del líquido alcanza los electrodos, tanto el relé
como el led L entran en funcionamiento.
La figura 3.28 muestra el diagrama de tiempos del transductor
conductivo.
3.6 DISEÑO DEL TRANSDUCTOR DE PRESIÓN
De acuerdo a las características del medio mencionadas al
inicio del capítulo, se optó por buscar un transductor de presión
que se ajuste a dichas condiciones. El transductor seleccionado (ver
figura 3.29) es del tipo interruptor, opera en el rango de 8 a 28
cm de altura de nivel. Posee un selector de 26 posiciones, el cual
conmuta de apagado (OFF) a encendido' (ON) y viceversa, a un nivel
prefijado del rango. *~
La figura 3.30 explica en diagramas de bloques las partes
constitutivas de este transductor, debido a razones de ajuste del
rango de trabajo se acopla al sensor un amplificador de presión en
forma de émbolo el cual es ubicado al fondo del recipiente, la presión
hidrostática amplificada se transmite al elemento sensor a través
de una manguera de 4 mm de diámetro. El sensor de presión es del
tipo -diferencial y toma como referencia la presión atmosférica. El
sensor activa un relé cuando llega a la presión de disparo seleccionada.
Las pruebas realizadas en laboratorio consistieron en hacer

-86-
VISTA SUPERIOR
VISTA FRONTAL VISTA LATERAL
Fig. 3.29 : Estructura del sensor de presión : (a) Conducto presión de
entrada; (b) Conducto presión de referencia (p. atmosféri-
ca); (c) Diafragma; (d) Resorte de caja; (e) Ajuste de la
conmutación (26 posiciones); (f) Bornes del interruptor;
(g) Soporte metálico.
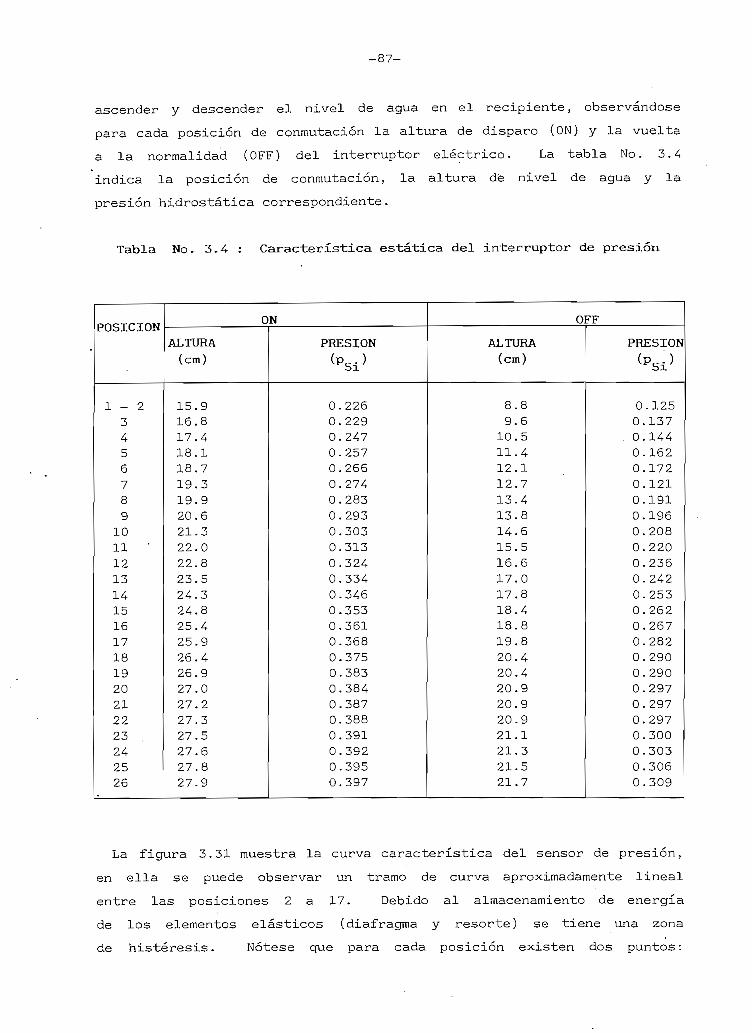
-87-
ascender y descender el nivel de agua en el recipiente, observándose
para cada posición de conmutación la altura de disparo (ON) y la vuelta
a la normalidad (OFF) del interruptor eléctrico. La tabla No. 3.4
indica la posición de conmutación, la altura dé nivel de agua y la
presión hidrostática correspondiente.
Tabla No. 3.4 Característica estática del interruptor- de presión
POSICIÓN
1 - 234567891011 '121314151617181920212223242526
ON
ALTURA(cm)
15.916.817.418.118.719.319.920.621.322.022.823.524.324.825.425.926.426.927.027.227.327.527.627.827.9
PRESIÓN
(PSÍ}
0.2260.2290.2470.2570.2660.2740.2830.2930.3030.3130.3240.3340.3460.3530.3610.3680.3750.3830.3840.3870.3880.3910.3920.3950.397
OFF
ALTURA(cm)
8.89.610.511.412.112.713.413.814.615.516.617.017.818.418.819.820.420.420.920.920.921.121.321.521.7
PRESIÓN
'"Si*
0.1250.137
. 0.1440.1620.1720.1210.1910.1960.2080.2200.2360.2420.2530.2620.2670.2820.2900.2900.2970.2970.2970.3000.3030.3060.309
La figura 3.31 muestra la curva característica del sensor de presión,
en ella se puede observar un tramo de curva aproximadamente lineal
entre las posiciones 2 a 17. Debido al almacenamiento de energía
de los elementos elásticos (diafragma y resorte) se tiene una zona
de histéresis. Nótese que para cada posición existen dos puntos:

el encendido y apagado separado por una zona muerta.
3.6.1 CARACTERÍSTICAS DEL INTERRUPTOR DE PRESIÓN
- El interruptor de presión consta de tres elementos básicos: diafragma,
resorte de carga y mecanismo de conmutación eléctrica. El diafragma
tiene un diámetro de aproximadamente 6 cm, con un movimiento típico
de 0.8 mm, responde a bajas presiones, tiene un tiempo de respuesta
en el orden de los mseg, es insensible a golpes, vibraciones y movi-
mientos bruscos.
El resorte de carga está graduado para 26 posiciones de conmutación
en el rango de 8 a 28 cm del nivel de agua.
El conmutador eléctrico dispone de dos contactos: uno normalmente
abierto y el otro cerrado. La capacidad de corriente y voltaje
especificada en placa son: 15 A/ 120-250 VAC.
- El interruptor de presión responde a la diferencia entre la presión
hidrostática sensada y la presión atmosférica de referencia. De
las pruebas realizadas en laboratorio se ha observado una tolerancia
en las zonas de disparo, la operación está separada por una zona
de inactividad o zona muerta. (Ver figura '3.32).
- El número de ciclos de operación de un interruptor de presión, en
general depende de varios factores: la frecuencia de trabajo, la
presión por unidad de área aplicada al elemento sensor, el medio
ambiente en el que opera, etc. Los interruptores de presión comercia-
les normalmente tienen una vida de 10.000 a 2'000.000 de ciclos
de operación sobre condiciones de temperatura normal.
- La temperatura juega un papel importante sobre la dilatación del
diafragma y el resorte de carga, sus puntos de disparo varían debido
a cambios de temperatura. El diafragma opera generalmente a bajas
temperaturas, y las temperaturas altas ocasionan un deterioro prematu-

-89-
Fig. 3.30 : Diagrama de bloques del transductor de presión.
TOLERANCIA ON
T O L E R A N C I A OFF
PUNTO DE DISPAROON '
ZONA MUERTA
PUNTO DE DISPARO
OFF
Fig. 3.32 : Tolerancia del punto de disparo de un conmutador de presión.
DK
Fig. 3.33 : Circuito del conmutador flotante,

j : i i :-l~ l\~rJ:: :Eiq::;: 5i:3í i:':' i : : - : Caracteirísirica1: esrtá-faica del sensor de presión (líquidoTíT
' V^l
~-agua-}-> — :-...;-
. . . .
-
Spiros

-91-
3.7 DISEÑO DEL CONMUTADOR FLOTANTE
La finalidad de este dispositivo es la de manejar un relé
eléctrico a un nivel prefijado de líquido sobre el rango de O a
25 cm de altura. El nivel de líquido es sensado a través del flotador
del transductor resistivo, las variaciones de nivel traducidas a
variaciones de voltaje en el rango de O a 4V que se sitúan a la
salida del amplificador diferencial (ver sección 3.4.4) nos servirán
como señal de entrada al circuito conmutador.
El diseño del circuito se halla en la figura 3.33. Como
puede observarse, la salida del amplificador diferencial WE5534
se acopla a la entrada inversora del circuito operacional LM307N,
el cual está configurado como un comparador con histéresis. El
punto de conmutación o de referencia está dado por él divisor de
voltaje R y P acoplado a la entrada no inversora del operacional.4o 10
cuando VT < V (voltaje de entrada es menor al de referencia) se•J- H
satura la salida del operacional a un valor cercano a +15V, lo que
obliga a Q y Q a cortarse, y por tanto no operan el relé ni el
led I . Cuando VT > V (voltaje de entrada es mayor al de referencia)r -1- R 7
la salida del operacional se saturará hacia valores cercanos a OV,
obligando a Q y Q a conducir en la zona de saturación, y por lo
tanto entran en operación tanto el relé como el led de indicación
V
En complemento a lo ya explicado, el diodo D ayuda a que
Q_ entre en la zona de corte. La resistencia R constituye unab 49realimentación positiva al amplificador, la que introduce una zona
de histéresis de aproximadamente O.3V sobre el punto de conmutación.
3.8 DISEÑO DE LA FUENTE DE PODER
A fin de polarizar los circuitos electrónicos, es necesario
el disponer de fuentes de corriente continua. En nuestro caso se
van a usar los siguientes voltajes: j- 15V y f 5V, con una co-
rriente máxima de 1A.

-92-
El diseño usual contempla 4 etapas básicas conocidas:
transformación, rectificación, filtraje y regulación. En nuestro
diseño la primera etapa (ver anexo B , diagrama 6 ) está constituida
por un transformador de las siguientes características:
Primario:
Secundario:
v = 120 VP
0.6 A
VA = 72 VAP
28 V v = 38 V
isl = 1.2 A XS2 = 1 A
34 VA
La segunda etapa está dispuesta por cuatro diodos en ca
da secundario que forman un rectificador de onda completa, el circuito
tiene la finalidad de dar dos tipos de voltaje: positivo y negativo.
La tercera etapa está conformada por condensadores de filtro, y
la cuarta y última etapa está constituida por los reguladores integra-
dos .
A continuación vamos a diseñar los rectificadores y filtros
que acompañan a los reguladores integrados: uA7815, uA7915, uA7805
y uA7905. Se ha tomado como procedimiento de diseño, el dado por
el libro de reguladores de ' voltaje de la firma Texas -Instruments
(ver bibliografía) , para una mejor comprensión se añade en el anexo
D la guía de diseño:

-93-
Datos generales :
I = 1 A (corriente de carga máxima)
out (rizado) P - P
f ,linea = 60 Hz
Las especificaciones del regulador uA7805 son:
V.M . » 7 ViN min
-,T - = 25 ViN max
Rechazo al rizado = 62 db - 1000
Cálculo:
Valor de la componente de rizado del voltaje de entrada:
v. , . * 3 mV x 1000 = 3 Vin (p - p)
Vin (pk) = 1.5 V
in (p - p)in RMS 2
in RMS
Voltaje CH entrada al regulador:
v- • + v- / , \ v < VIM ~ v- / i ^in min in (pk) c IN max in (pk)
¡ . 5 V < V < 2 3 . 5 Vc
Escogemos:

-94-
V V n r i r 16 Vc 1N reg
V, , . = 19 V (23.5 V - 20%)(pk)
Factor de rizado:
Vin RMSrf =
Vc
1 1 Vrf = x 100
16 V
rf = 6.87 %
Reducción de voltaje:
V
KF = —~V(PK)
K = 16 V x 10019 V
84%
De la figura 7,7 del anexo D se tiene:
7.3 < WCRT < 11 (para 0.1%<--- < 30%)L RL
De la figura 7.5 del anexo D se t ierre :
^5% < - Ü_ < 5% (para K^ = * 84%)
RL F
De la figura 7.5 del anexo D escogemos:
"V = 5'5%WCR. - 9

-95-
Resistencia equivalente de carga:
VR
1N regL
"L max
16 V
1 A
RL = 16
Cálculo de W:
2TT f
377radseg
Cálculo de Rs:
0.88 Sí
Cálculo de C:
WCR,
WRT
C = 1500 uF
Corriente media que soportan los rectificadores:
F (Av)
(Av)

Para:
-96-
De la figura 7.6 del anexo D se tiene:
nWCR = 18 (n = 2)
R% —f- = 2.75%n R
El valor de corriente RMS que soportan los rectificadores es:
F (RMS)
!„ (AV)
"F (RMS)
El valor de corriente pico que soportan los rectificadores es:
XF (pk)
IF (AV)
I , . = 3.5 A (por diodo)
El voltaje de pico inverso de los rectificadores es:
PIV = V(pk)
PIV = 38 V
Condiciones a ser verificadas:
[V, , . + A V ] K F + v. / , \ V(pk) r linea m (pk) ^ V IN max (reg)
18.3 V ^ 25 V (cumple)
(pk) — línea in (pk) IN min (reg)
12.1 >- 7 V (cumple)

-97-
Voltaje requerido (RMS) en el secundario del transformador
V + v 2VSEC RMS SI
14 V
Corriente pico en el secundario:
ISEC (pk) = 2 XF (RMS)
XSEC (pk) = 1'7 A
- Potencia en el secundario:
VA = 2 V ISI SEC RMS F (RMS)
VAQ1 = 34 VAo 1
Los cálculos para . el regulador UA7815 son similares al regula-
dor uA7805} por esta razón tan sólo daremos los resultados obtenidos:
Datos generales :
1A
v . < 3 mAout
60 Hz
Las especificaciones del UA7815 son:
V = 17 5 VIW min
VTM = 30 VIW max
Rechazo al ruido = 54 db 500

-98-
De los cálculos:
« DMCin RMS0.53 V
V VIN reg
23 V
(pk)
rf
WCR
F (AV)
F (RMS)
F (pk)
PIV
VSEC RMS
26 V
2.3%
88%
2.5%
27
23
2500 uF
0.6
0.5 A
1.25%
1-3 A
4 A
52 V
S2
(por diodo)
(por diodo)

-99-
(pk) " *
VAQO = 38 VAo
Cabe anotar que los cálculos para los reguladores negativos
(uA7905 y uA7915) son idénticos a los cálculos para reguladores
de tensión positiva. La corriente de carga suministrada por los
reguladores negativos es mínima y no afecta en mucho los cálculos
de potencia en tomas del secundario
En resumen se ha escogido como elemento de los rectificadores
al diodo IN4004 cuyas características eléctricas son:
PIV = 600 V
IF (AV)
Los capacitores de filtro se escogieron así:
2200 uF/35 V (filtro pasa bajos)
0.1 uF/100 V (filtro pasa altos)
3.9 DISEÑO DE CONTROL DE BOMBAS
Para obtener la curva característica de cada transductor y ob-
servar la respuesta de los medidores a los cambios de nivel, es
necesario variar la altura del líquido de prueba en el recipiente.
En el equipo demostrativo el módulo de pruebas posee dos
cubetas adyacentes, aquí la variación de nivel puede ser realizada
fácilmente por medio de un mecanismo de bombeo.
El sistema diseñado, como se ve en la figura 3.34, consta
de un motor (Mi) unido por una banda de transmisión (BT) a dos cabeza-
les de bomba (CB1, CB2). El motor escogido es monofásico de'inducción,
-100-
del tipo fase partida con condensador permanente, sus características
son:
- V = 120 Vac
- XN = 2A
HP
N = 1800 rpm
Los cabezales de bomba son del tipo plástico con rodamientos
metálicos, incluye internamente una manguera. Cuando el eje del
motor gira en un sentido determinado, los rodamientos metálicos
siguen el movimiento aprisionando el fluido atrapado en la manguera.
De esta manera el líquido es transportado de una cubeta a otra.
El diagrama 9 del 'anexo B da una idea más exacta del funcionamiento
del cabezal de bomba.
Los dos cabezales tienen características idénticas de bombeo,
se diferencian únicamente en la longitud de su eje, el uno es corto
y el otro es largo. Ambos ejes están unidos mecánicamente en una
base metálica. Las especificaciones de los cabezales se detallan
a continuación:
Cubierta plástica de
Diámetro interno de
manguera
Material de la manguera
Capacidad de bombeo
Flujo máximo (medido a
660 rpm)
Presión máxima de cabe-
zal
Velocidad máxima de giro
policarbonato le_xan
3/8"
C-Flex
3.8 ml/rev.
2280 ml/min.
20 psi (continuo), 35 psi (Ínter
mitente)
600 rpm

-101-
El acoplamiento mecánico entre motor y cabezales está dado
por una banda de transmisión más dos poleas de diferente diámetro.
Por recomendación del fabricante, los cabezales no pueden girar
más allá de las 600 rpm, por esta razón se ha escogido una relación
de radios de poleas de 2 a 7.2 cm, que reducen la velocidad de 1800
rpm a 500 rpm respectivamente; veamos:
Nrt = NI x —2 r2
N = 1800 rpm x 2 cm
7.2 cm
N = 500 rpm
El control de bombeo es de tipo manual con opción a descone-
xión, ya sea por medio del conmutador eléctrico del sensor de presión,
o por el relé auxiliar manejado por el transductor conductivo o
por el dispositivo de flotación switch. El circuito de 'control
se halla en la fig. 3.35.
El motor arranca y funciona en cualquier sentido de giro,
gracias a la partición de fase en cuadratura producida por dos devana-
dos idénticos defasados temporal y _ espacialmente. El condensador
es del tipo de aceite de un valor de 25 uF/220 V, y es de uso permanen-
te, es decir, no hace falta desconectarlo una vez que el motor haya
arrancado.
Debido a su reducido par de arranque, el motor puede invertir
su giro fácilmente mediante el interruptor SW0. , El contacto normalmen-o
te cerrado del relé auxiliar R permite la desconexión automáticalj
del sistema una vez que se ha llegado al punto de conmutación (nivel
prefijado del líquido) . En caso se quiera que la conexión y descone-
xión del motor sea totalmente manual, se deberá cortocircuitar el
camino de corriente por medio del interruptor SW .
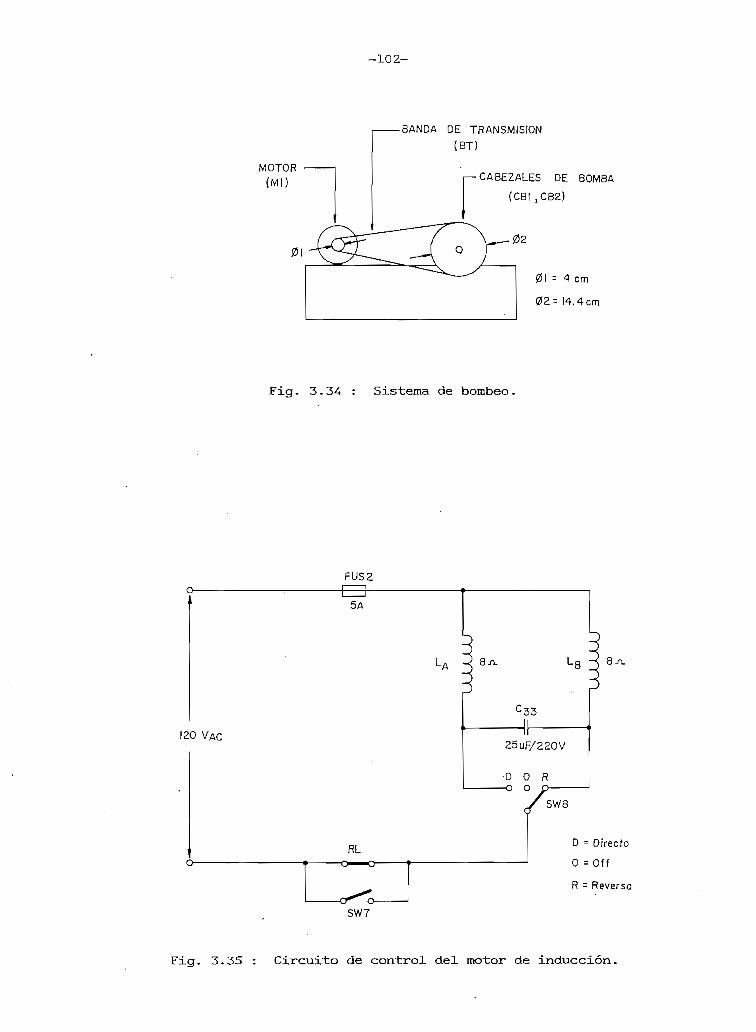
-102-
MOTOR
(MI)
BANDA DE TRANSMISIÓN
(BT)
I— CABEZALES DE BOMBA
(CBI ,CB2)
01 = 4 cm
02 = I4.4cm
Fig. 3.34 : Sistema de bombeo.
•J
I
o VAC
i
FUS 2i 11 i
5A
RL
r^^ j-i
LA 3 8-n-
C3
f
L8
3.
1
25uF/220V
-D 0 R
/SW8
D = Directo
0 =0f f
R = Reversa
SW7
Fig. 3.35 : Circuito de control del motor de inducción.

CAPITULO IV
PRUEBAS Y ANÁLISIS DE RESULTADOS
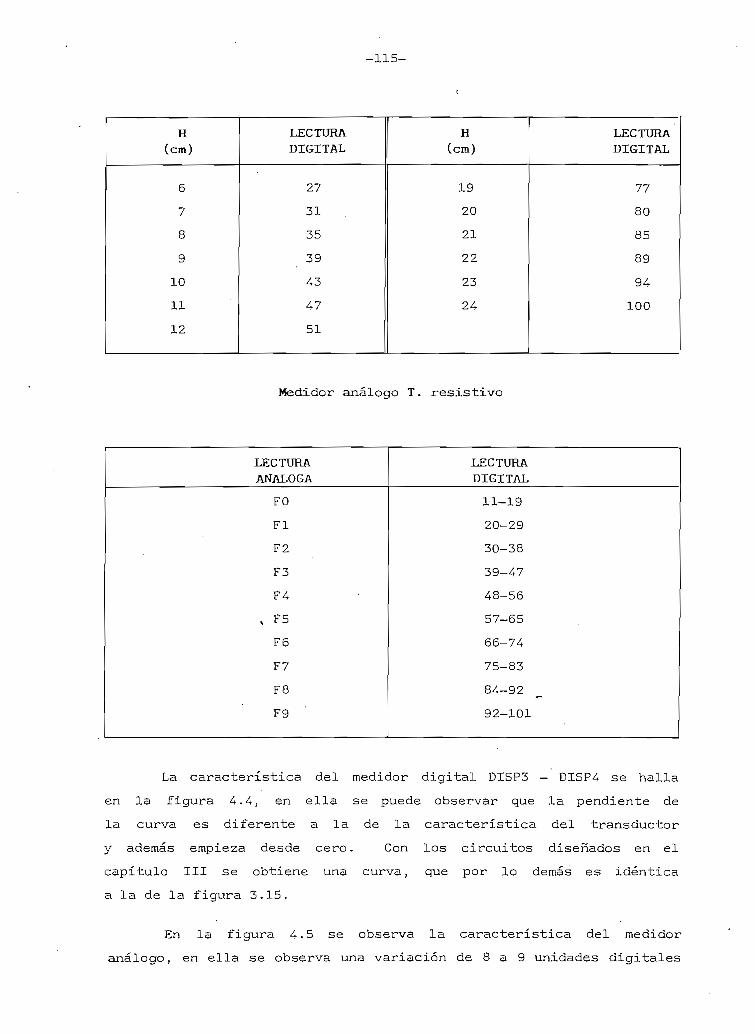
-115-
H(cm)
6
7
8
9
10
11
12
LECTURADIGITAL
27
31
35
39
43
47
51
H(cm)
19
20
21
22
23
24
LECTURADIGITAL
77
80
85
89
94
100
Medidor análogo T. resistivo
LECTURAANÁLOGA
FO
Fl
F2
F3
F4
, F5
F6
F7
F8
F9
LECTURADIGITAL
11-19
20-29
30-38
39-47
48-56
57-65
66-74
75-83
84-92
92-101
La característica del medidor digital DISP3 - DISP4 se halla
en la figura 4-4, en ella se puede observar que la pendiente de
la curva es diferente a la de la característica del transductor
y además empieza desde cero. Con los circuitos diseñados en el
capítulo III se obtiene una curva, que por lo demás es idéntica
a la de la figura 3.15.
En la figura 4.5 se observa la característica del medidor
análogo, en ella se observa una variación de 8 a 9 unidades digitales

cáfldSeJH^TO^dJD^
Spiros

-117-
con cada led indicador de nivel (FO a F9), lo que representa una
división en pasos de aproximadamente 1.8 cm de altura de nivel de
líquido por cada led indicador.
4.2.3 PRUEBAS TRANSDUCTOR DE PRESIÓN
Determinación de la curva característica
Para obtener la curva característica de este sensor fue necesa-
rio el siguiente equipo: sensor de presión, ohmetro, escala graduada
en cm, cubeta llena de agua.
El procedimiento seguido fue el siguiente:
1. Conectar los bornes del contacto normalmente abierto del
sensor de presión a la entrada del ohmetro.
2. Colocar la perilla graduada (26 posiciones) en la primera
posición.
3. Sumergir lentamente el amplificador de presión (émbolo) hasta
llegar al punto de conmutación "ON" del sensor. En este
instante el ohmetro marcará O ohmios. No alterar la posición
de inmersión del émbolo.
4. Marcar el nivel máximo de inmersión del émbolo así como el
nivel del líquido. Medir con la escala graduada la diferencia
de altura entre estos dos puntos. Anotar este valor.
5. Subir lentamente el émbolo hasta llegar al punto de conmutación
"OFF". En esta posición el ohmetro marcará alta resistencia
(circuito abierto). No alterar la posición de inmersión
del émbolo.
6. Marcar el nivel máximo de inmersión del émbolo así como el
nivel del líquido. Medir con la escala graduada la diferencia
de altura entre estos dos puntos. Anotar este valor.

-118-
7. Repetir nuevamente el procedimiento para cada posición de la pe-
rilla graduada.
Los resultados obtenidos fueron los siguientes (ver figura
3.31):
POSICIÓN DE LAPERXLLA GRADUADA
1 - 2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
H "ON"(cm)
15.9
16.8
17.4
18.1
18.7
19.3
19.9
20.6
21.3
22.0
22.8
23.5
24.3
24.8
25.4
25.9
26.4
26.9
27.0
27.2
27.3
27.5
27.6
27.8
27.9
H "OFF"(cm)
8.8
9.6
10.5
11.4
12.1
12.7
13.4
13.8
14.6
15.5
16.6
17.0
17.8
18.4
18.8
• 19.8
20.4
20.4
20.9
20.9
20.9
21.1
21.3
21.5
21.7
DIFERENCIA DEALTURA EN cm(RANGO DE NOOPERACIÓN)
7.1
7.2
6.9
6.7
'6.6
6.6
6.5
6.8
6.7
6.5
6.2
6.5
6.5
6.4
6.6
6.1
6.0
6.5
6.1
6.3
6.4
6.4
6.3
6.3
6.2

-119-
Como se observa en la figura 3.31, la característica de este
sensor está conformada por 26 puntos que representan el número de
conmutaciones del sensor. Para cada posición de conmutación se
obtiene dos alturas de nivel en cm, una cuando el contacto eléctrico
del sensor se cierra (ON) y otra cuando se abre (OFF). La diferencia
de separación entre estas dos curvas varía entre 6.1 y 7.2 cm de
altura de agua.
Como se puede observar, para cada posición existe una zona
muerta o zona de no disparo del contacto eléctrico (zona de no opera-
ción) , con esto se asegura el funcionamiento del transductor con
líquidos que mantienen la superficie de nivel en continuo movimiento.
La zona muerta evita disparos imprevistos del conmutador eléctrico.
El rando de medida es de O a 27.9 cm de nivel de agua para
la curva "ON", mientras que para la curva "OFF" va de O a 21.7 cm.
En la figura 3.31 se observa existe una zona aproximadamente
lineal entre las posiciones 2 a 17, mientras que desde la posición
18 en adelante la pendiente de la curva decae notablemente.
La sensibilidad de estas dos curvas es la siguiente:
25.9 — 15.9sensibilidad curva "ON" = • '-—— '-— = 0.67 cm/posición
19.8—8.8sensibilidad curva "OFF" = '•—— : = 0.73 cm/posición
Cabe anotar que la característica de este transductor varía
si cambia la densidad del líquido por efectos de la temperatura,
pues la presión hidrostática es función de la densidad. La curva
característica también variaría si es que se probara con líquidos
de otras densidades.
4.2.4- PRUEBAS TRANSDUCTOR CONDUCTIVO
Para probar este transductor fue necesario el siguiente equipo:
electrodos del sensor, cubeta, varios líquidos y módulo principal

-120-
de pruebas.
El procedimiento seguido fue el siguiente:
1. Conectar los terminales del sensor (Te y Tcd) al módulo princi-
pal. Encender el módulo principal y poner el interruptor
SW6 en la posición de encendido "ON" (posición superior).
2. Llenar la cubeta con cualquier líquido (conductores y no
conductores).
3. Sumergir uno de los electrodos en la cubeta. Cabe indicar
que el conductor externo del sensor capacitivo actúa como
uno de los electrodos del sensor conductivo (primer electrodo).
4. Coger el segundo electrodo del sensor y tan sólo topar el
nivel del líquido. Observar si existe conmutación del relé
auxiliar RL, si se ilumina el led ICD.
5. Separar el segundo electrodo del líquido y observar si el
led ICD conmuta apagado.
6. Repetir el procedimiento con otros líquidos.
La siguiente es una lista de algunos fluidos comunes, los
cuales pueden y no pueden ser detectados su nivel por medio del
transductor conductivo:
FLUIDOS CONDUCTIVOS
Agua potable
Agua de mar
Solución de sulfato de cobre
Ácidos débiles
Bases débiles
Mezclas de agua y glicol
Café
FLUIDOS NO CONDUCTIVOS
Agua pura
Gasolina
Aceite
Líquidos de freno
Alcohol
Glicol etileño
Whiskey

-121-
Cuando la superficie de nivel del líquido conductor se halla
en continuo movimiento, puede acarrear problemas en la detección,
pues las falsas lecturas ocasionan que el relé oscile entre la posición
abierto y cerrado, sin que su señal se estabilice. Es esta la razón
por la que los sensores industriales de este tipo poseen un electrodo
adicional que introduce una zona de no operación o zona muerta,
evitándose con esto errores de lectura en líquidos con su superficie
en agitación.
La mayor ventaja de este transductor con respecto a los otros,
es su sencillez. Pues como elemento externo utiliza tan sólo dos
electrodos simples que tengan la propiedad de no oxidarse cuando
entren en contacto con el líquido.
La tensión alterna y los bajos niveles de frecuencia y voltaje
con los que se trabaja no perjidican las características químicas
del líquido de prueba.
4.2.5 PRUEBAS CONMUTADOR FLOTANTE
Para obtener el rango de operación de este sensor fue necesario
utilizar el siguiente equipo: transductor resistivo, voltímetro
digital, escala graduada, cubeta llena con agua (módulo de pruebas),
módulo principal.
El procedimiento seguido para obtener el rango de operación
es el siguiente:
1. Conectar los extremos del sensor resistivo (Trl - Tr2) al
módulo principal. Encender luego el módulo principal.
2. Conectar las puntas de prueba del voltímetro digital al punto
S6 y a tierra (carcasa). Escoger una escala máxima de medición
para 4V.
x3. Hacer coincidir el nivel mínimo del sensor con el O de la
escala graduada en cm.

-122-
4. Subir gradualmente el nivel del líquido y tomar nota de la
altura de nivel en correspondencia a la lectura del voltímetro.
Los resultados obtenidos fueron los siguientes:
H(cm)
0
1
2
3
4
5
6
7
8
9
10
11
12
V(V)
0.006
0.20
0.38
0.57
0.69
0.88
1.06
1.14
1.35
1.50
1.65
1.79
1.98
H(cm)
13
14
15
16
17
18
19
20
21
22
23
24
V(V)
2.13
2.32
2.43
2.53
2.68
2.82
2.97
3.12
3.27
3.44
3.59
3.85
La figura 4.6 muestra los resultados anteriores. La caracterís-
tica es similar a la del transductor resistivo, puesto que el circuito
de sensado forma parte de este transductor. En esta curva se muestra
la relación entre voltaje de entrada al circuito operacional que
actúa como comparador y la altura de nivel de líquido en cm.
Poner la referencia del voltímetro digital a tierra y el
otro extremo al punto de prueba S10. Mediante variación
del potenciómetro PÍO escoger un punto de referencia V cual—R
quiera. Anotar este valor.
Colocar el interruptor SW6 en la posición inferior de encendido
(ON). .

,".! ui: rzr-i'ii_-. L- . -...: L-izirr —iu_ u rrr i L i -Uij
H (cm)
Fig.. 4.6 .: Garacterística de entrada al circuito del conmutador flotante
Vó (V) !;
1.84- 2.0 V in (V ) :
dei::cpnmu-badoir; flbtante^para; un; punto á& conmutación
±1
Spiros

-124-
7. Conectar las puntas de prueba del muítímetro digital al punto
S9 y a tierra (carcasa).
8. Incrementar el nivel del líquido desde la posición mínima
hasta que se observe la conmutación "ON" del relé mediante
el encendido del led I . Anotar la lectura del voltaje de
entrada V .
9. Descender el nivel del líquido y observar el punto de conmuta-
ción "OFF11 del relé auxiliar. Anotar la lectura del voltímetro.
Como consecuencia de los pasos 4 a 7 del procedimiento se
obtuvo los siguientes resultados para un punto de conmutación cual-
quiera (ver figura 4.7):
Conmutación OFF-ON : V = IV
Conmutación ON-OFF : V_ = IVri
V = 1.84 V
V es el voltaje de referencia, mientras que V es el voltajeR _ I
de entrada. Para un punto de conmutación fijado por el potenciómetro
P se ha obtenido una zona de no operación (zona muerta), de aproxima-
damente 0.16 V (2V - 1.84 V). La zona de no operación es útil cuando
no se quiere que opere el relé con superficies de nivel de líquido
en continuo movimiento.
4-. 3 CONCLUSIONES
El presente trabajo nos ha dado la oportunidad de investigar,
diseñar, construir y probar algunos elementos relacionados con la
variable nivel de líquidos. El desarrollo de este tema nos permite
concluir los siguientes puntos:
Av 1. , La variable nivel de líquidos reviste una gran importancia
especialmente en los procesos industriales, por lo que se

-125-
optó en diseñar y construir un equipo de pruebas demostrativo
que sirviera como instrumental didáctico para el estudio
y experimentación de esta Variable.
2. En el campo industrial es muy común el llenado y vaciado
de líquidos en tanques abiertos o cerrados. El proceso se
realiza en forma manual o automática, para lo cual se disponen
de sensores de nivel continuos o discretos que monitorean
continuamente o a ciertos intervalos el estado de nivel.
3. La mayoría de procesos de llenado y vaciado de tanques utilizan
sensores del tipo discreto, puesto que sólo interesa el detectar
el líquido a cierto nivel para entonces tomar una decisión.
4. El tener una idea de la geometría y dimensiones del recipiente
que contiene el líquido, junto con la medida exacta de la
altura de nivel, permite determinar volúmenes exactos.
5. Los factores más importantes que determinan la elección de
un transductor son: característica física-química del líquido
escogido, rango de medición, precisión del transductor, tiempo
de vida del transductor, costos, conflabilidad.
6. Un modelo demostrativo a pequeña escala- expone criterios claros
de diseño, en él se puede ver en forma simple la interacción
de la variable con el elemento sensor. Un modelo de pruebas
demostrativo resulta el método más ' idóneo para mejorar y
sofisticar los diseños.
7. El sensor de mayor conflabilidad entre los diseñados en la
presente tesis es el capacitivo, puesto que no posee partes
mecánicas en movimiento, las cuales son propensas a desgastes
e introducen errores en los transductores.
8. La precisión y linealidad en las características son también
dos virtudes de ponderación de un transductor, en este campo
el transductor capacitivo supera a los demás.
-126-
En ocasiones la superficie de líquidos se halla en continuo
movimiento y la lectura de nivel se hace difícil. Por esta
razón se introducen tiempos de retardo en el muestreo, zonas
muertas, valores medios entre varias lecturas, etc. En nuestro
caso, el transductor de mayor sensibilidad a las perturbaciones
en la superficie de nivel es el conductivo, y el menos sensible
es el transductor de presión.

BIBLIOGRAFÍA Y REFERENCIAS BIBLIOGRÁFICAS

BIBLIOGRAFÍA
1. Creus A., "Instrumentación Industrial", Marcambo S.A., España, se
gunda edición, 1981.
2. Curtis D. Johnson, John Wiley and Sons, "Proccess Control Instru-
mentation Technology", N.Y., segunda edición, 1982.
3. Considine, Douglas M., "Process Instruments adn Controls Handbook",
N.Y., Mc-Graw Hill, segunda edición, 1974.
4. Harry Nor':Qny "Sensores y analizadores", Colección electrónica/in
formática, Editorial Gustavo Gili, S.A., Barcelona España, 1984.
5. Banda H.A., "Fundamentos de Control Electrónico de Potencia", E.P.
N. , Facultad de Ingeniería Eléctrica, Departamento de Control, -
1985.
6. Jerry L. Lyons, "The Designer's Handbook of Preseure-Sensing Devi_
ees", N.Y., 1980.
7. Motorola CMOS Data, 1978.
8. National Semiconductors Linear Handbook, 1982.
9. Signetics TTL Data Manual, 1984.
10. Reference Data for Radio Enginneers, sexta edición, 1979.
11. The Voltage Regulator Handbook, Texas Instruments, U.S.A., 1977.
12. Manual Code-Parmer, 1985-1986.
-128-
REFERENCIAS BIBLIOGRÁFICAS
(1) Norton,. H.N., "Sensores y Analizadores", Editorial Gustavo Gili
S.A., Barcelona, pág. 47 (1982).
(2) Banda, H.A., "Fundamentos de Control Electrónico de Potencia",
Escuela Politécnica Nacional, Facultad de Ingeniería Eléctrica, -
Departamento de Control, pág. 44 (1985).
(3) Reference Data for Radio Enginneers, sexta edición, 1979, sección
6-9.
-129-

i*'
m x CD
CO

ANEXO A
MANUAL DE USO Y MANTENIMIENTO

MANUAL DE USO Y MANTENIMIENTO
MANUAL DE USO
El simulador construido está constituido por tres módulos
básicos: módulo de pruebas, módulo principal y módulo de bombeo.
A continuación se describirán cada uno de los módulos:
A) MODULO DE PRUEBAS
En el módulo de pruebas están alojados cuatro sensores básicos;
éstos son: capacitivo, resistivo, conductivo y de presión. Con
el fin de obtener las características básicas de estos sensores
con respecto a las variaciones de nivel de un líquido, se ha montado
dos recipientes que contienen en su interior el fluido a prueba
(ver anexo B, diagrama 7). A voluntad del operador, estos recipientes
podrán ser llenados y vaciados para las pruebas respectivas. Las
señales obtenidas a la salida de los sensores son transmitidas al
módulo principal a través de un cableado. La nomenclatura de cada
uno de ellos es:
Te : cable coaxial del sensor capacitivo
Tp - Tp : "cables de conexión del sensor de presión
Tr - Tr : cables de conexión del sensor resistivo
Tcd : cable de conexión del sensor conductivo
Cada uno de los elementos del módulo pueden ser montados
y desmontados fácilmente, sin que implique esfuerzo alguno. Los
elementos están plenamente identificados por medio de etiquetas.
B) MODULO PRINCIPAL
El módulo principal alberga los circuitos de acoplamiento,
medición y control de señal de los distintos transductores. También
se incluye los circuitos de la fuente de poder.
-132-
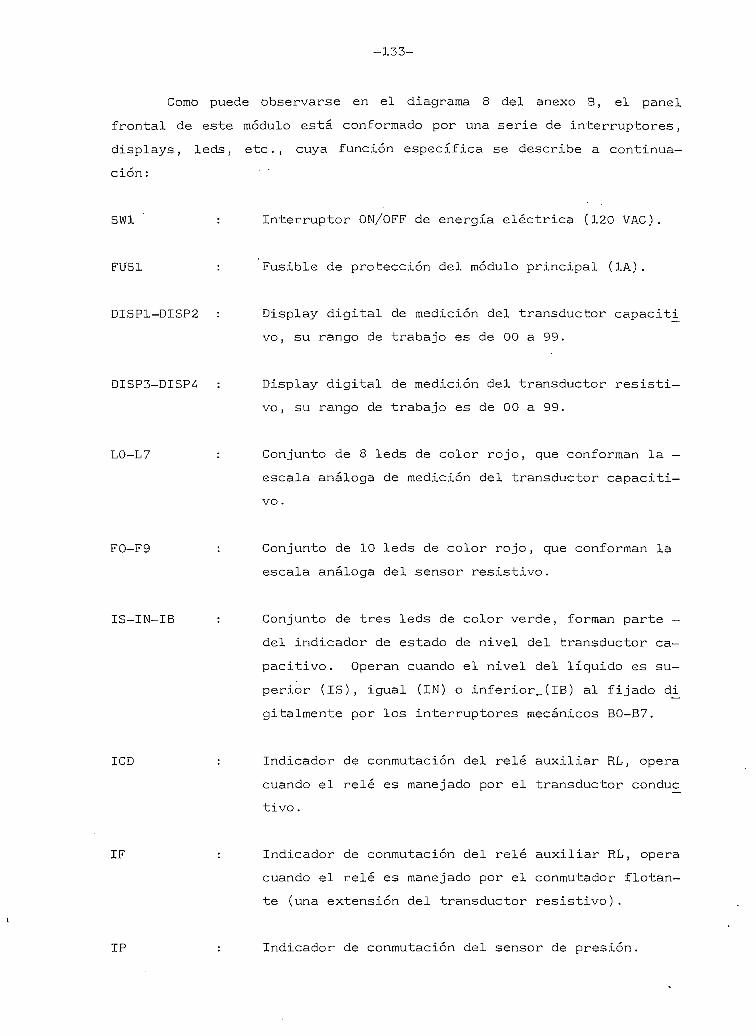
-133-
Como puede observarse en el diagrama 8 del anexo B, el panel
frontal de este módulo está conformado por una serie de interruptores,
displays, leds, etc., cuya función específica se describe a continua-
ción:
SW1 Interruptor ON/OFF de energía eléctrica (120 VAC)
FUS1 Fusible de protección del módulo principal (1A).
DISP1-DISP2 : Display digital de medición del transductor capaciti
vo, su rango de trabajo es de 00 a 99.
DISP3-DISP4 : Display digital de medición del transductor resisti-
vo j su r^ango de trabajo es de 00 a 99.
LO-L7 Conjunto de 8 leds de color rojo, que conforman la -
escala análoga de medición del transductor capaciti-
FO-F9 Conjunto de 10 leds de color rojo j que conforman la
escala análoga del sensor resistivo.
IS-IN-IB Conjunto de tres leds de color verde, forman parte —
del indicador de estado de nivel del transductor ca-
pacitivo. Operan cuando el nivel del líquido es su-
perior (IS), igual (IN) o inferior_(IB) al fijado di
gitalmente por los interruptores mecánicos BO-B7.
ICD Indicador de conmutación del relé auxiliar RL, opera
cuando el relé es manejado por el transductor conduc
tivo.
IF Indicador de conmutación del relé auxiliar RL, opera
cuando el relé es manejado por el conmutador flotan-
te (una extensión del transductor resistivo).
IP Indicador de conmutación del sensor de presión.
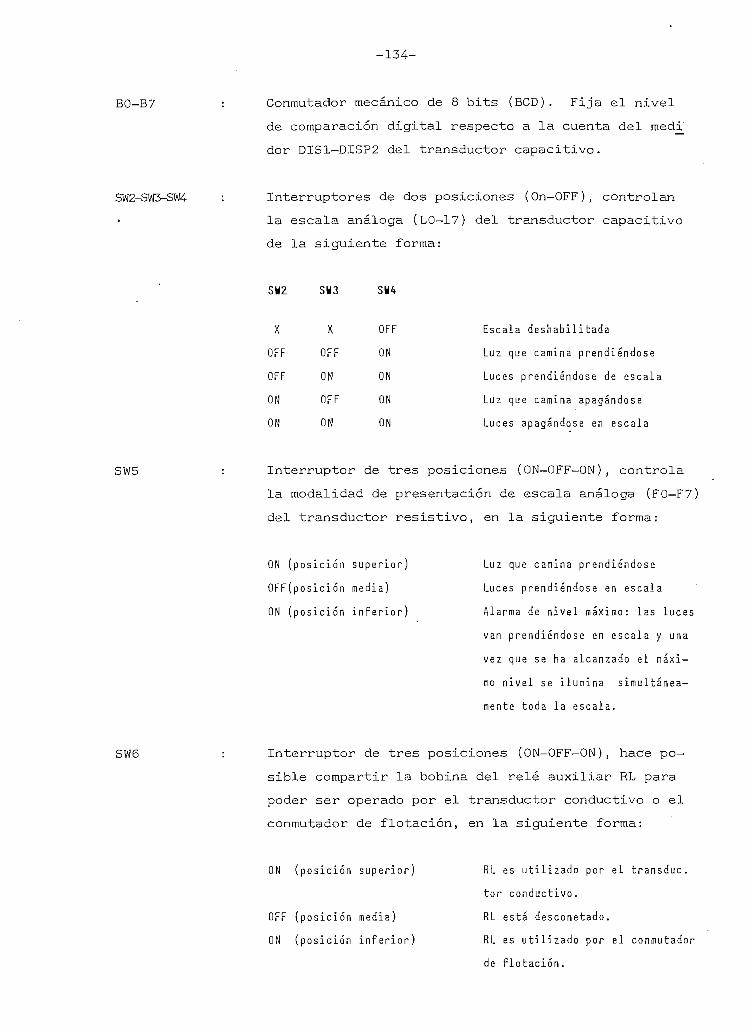
-134-
BO-B7 : Conmutador mecánico de 8 bits (BCD). Fija el nivel
de comparación digital respecto a la cuenta del medí
dor DIS1-DISP2 del transductor capacitivo.
SW2-SW3-SW4- : Interruptores de dos posiciones (On-OFF), controlan
la escala análoga (LO-17) del transductor capacitivo
de la siguiente forma:
SW2 SW3 SW4
X X OFF Escala d e s h a b i l i t a d a
O F F O F F O N L u z q u e c a m i n a p r e n d i é n d o s e
OFF ON ON Luces p r e n d i é n d o s e de escala
O H O F F O N L u z q u e c a m i n a a p a g á n d o s e
O N O N O N L u c e s a p a g á n d o s e e n escala
SW5 : Interruptor de tres posiciones (ON-OFF-ON), controla
la modalidad de presentación de escala análoga (FO-F7)
del transductor resistivo, en la siguiente forma:
O N ( p o s i c i ó n s u p e r i o r ) L u z q u e c a m i n a p r e n d i é n d o s e
O F F ( p o s i c i ó n m e d i a ) Luces p r e n d i é n d o s e e n escala
ON (pos ic ión i n f e r i o r ) A l a r m a de n i v e l m á x i m o : l a s luces
van p r e n d i é n d o s e en escala y una
vez que se ha a l c a n z a d o e l máxi -
mo n ive l se i l u m i n a s i m u l t á n e a -
m e n t e toda la e sca la .
SW6 : Interruptor de tres posiciones (ON-OFF-ON), hace po-
sible compartir la bobina del relé auxiliar RL para
poder ser operado por el transductor conductivo o el
conmutador de flotación, en la siguiente forma:
ON (pos i c ión s u p e r i o r ) RL es u t i l i zado por e l t r a n s d u c .
to r c o n d u c t i v o .
OFF {posic ión m e d i a ) RL está d e s c o n e t a d o .
ON (pos i c ión i n f e r i o r ) RL es u t i l i zado por e l c o n m u t a d o r
de f l o t a c i ó n .

-135-
Internamente el módulo contiene a tres placas con dispositivos -
electrónicos, éstas son:
Placa 1 : contiene circuitos del diagrama 1 y 2 del anexo B
Placa 2 : contiene circuitos del diagrama 3 y 4 del anexo B
Placa 3 : contiene circuitos del diagrama 5 del anexo B
Los potenciómetros contenidos en estas placas cumplen las siguien
tes funciones:
Pl : Ajusta el ancho de pulso t dado por el monoestable 1 (t.
capacitivo).
P2 : Ajusta el ancho de pulso t dado por el monoestable 2 (t.
capacitivo).
P3 : Equilibra el puente de Wheatstone (t. resistivo).
P4 : Ajusta la ganancia del amplificador operacional (t. resis-
tivo) .
P5 : Ajusta offset del amplificador operacional (t. resistivo).
P6 : Ajusta escala de frecuencia del conversor V/F (t. resisti-
vo) .
P7 : Ajusta offset del conversor V/F (t. resistivo).
P8 : Ajusta ancho de pulso del circuito monoestable, para el -
muestreo de la señal digital (t. resistivo).
P9 : Calibra escala análoga con el voltaje de entrada al circui_
to integrado LM3914 (t. resistivo).
PÍO : Ajusta punto de conmutación del relé auxiliar RL (comunta—
dor de flotación).

r /-136-
Con el objeto de ajustes y calibraciones se ha dejado 'dentro
de los circuitos varios puntos de prueba. Ver en diagramas 1 al
5 del anexo B puntos de prueba SI, S2, S3, ... S10. Estos son:
SI : Pulso de ancho variable t , dado por el monoestable
1 de IC1 (t. capacitivo).
S2 : Pulso de ancho fijo t , dado por el monoestable 2 de
IC1 (t. capacitivo).
S3 : Diferencia de ancho de pulso ¿ ( ¿ = t - t ) (t.
capacitivo).
S4- : Voltaje VI, dado por el ramal 1 del puente de Wheatstone
(t. resistivo).
55 : Voltaje V2, dado por el ramal 2 del puente de Wheatstone
(t. resistivo).
56 : Voltaje Vo de salida del amplificador diferencial ICC 11
(Vo = A. V21) (t. resistivo).*'
57 : Frecuencia de salida del conversor voltaje/frecuencia
(IC12) (t. resistivo).
S8 = Pulso de muestreo T , dado por el monoestable 1 de
IC16 (t. resistivo).
S9 : Voltaje V de entrada al amplificador operacional IC23
(conmutador flotante).
S10 : Voltaje V de referencia, entra al amplificador operacio-K
nal Ic23 (conmutador flotante).
En el lado posterior de este módulo se hallan dispuestos
los terminales de conexión, los cuales reciben las señales de los
sensores, éstos son:

-137-
Tc : Terminal de conexión sensor capacitivo
Tpl-Tp2 : Terminal de conexión del sensor de presión
Trl—Tr2 : Terminal de conexión del sensor resistivo
Tcd : Terminal de conexión del sensor conductivo
Adicionalmente a estos terminales, en el lado posterior de
este módulo se encuentran RL1 — RL2 que contienen al contacto normal-
mente cerrado del relé auxiliar RL, mediante cables estos terminales
se conectan a sus correspondientes en el módulo de bombeo.
C) MODULO DE BOMBEO
El módulo de bombeo se halla constituido por el motor MI
y los cabezales de bomba CB1-CB2 (eje corto-eje largo), dichos elemen-
tos se hallan acoplados mecánicamente por medio de poleas y una
banda de transmisión (BT). Internamente el módulo contiene el
condensador permanente (C33) del motor, y externamente los interrupto-
res de control de este módulo. Sus funciones son las siguientes:
SW7 : Interruptor DPDT, cortocircuita contactos normalmente
cerrados del relé auxiliar RL. Permite el control
manual o apagado automático de1 módulo de bombeo.
SW8 : Interruptor de tres posiciones (ON-OFF-ON), controla
el sentido de giro del motor, así como su parada.
FUS2 : Fusible de protección del módulo (5A).
Cada cabezal de bomba contiene 1 m de manguera C—Flex de
3/8", por donde el fluido de prueba es transportado de una cubeta
a otra en el .módulo de pruebas.
MANUAL DE MANTENIMIENTO
CALIBRACIÓN DEL EQUIPO
Antes de poner a prueba el equipo, es necesario someterlo
-138-
a una calibración de manera que las escalas de medida de los transduc-
tores coincidan en aproximación al nivel real del líquido.
Como se explicó en el capítulo III, los sensores de nivel
están diseñados para operar un rango específico de O a 25 cm de
altura de nivel, con este dato procederíamos entonces a calibrar
escalas; veamos:
— Calibración transductor capacitivo
Este tranductor posee dos tipos de medidor, el digital (DISP1-
DISP2) y el análogo (LO-L7), para calibrar las dos escalas sólo
basta a justar los potenciómetros de escala Pl y P2, y observar la
duración de las señales presentes en los puntos de prueba SI, 52
y S3. El procedimiento es el siguiente:
1. A un nivel de líquido de O cm, colocar las puntas del oscilos-
copio en los puntos SI, 52 y S3. Mediante variación de Pl
y P2 colocar t = 63 us (SI), t = 38 us (52), At = 25 us (S3).
Obsérvese en los medidores DISP1 - DISP2 la cuenta de 00.
2. Subir el nivel del líquido a una altura máxima de 24- cm,
verificar que la cuenta en DISP1 - DISP2 sea 99, si no lo
es aproxímese a este valor mediante el potenciómetro Pl.
Las señales obtenidas en este punto se aproximan a : t = 88 us
(SI), t = 38 us (52) y At = 88 us (53).
3. Volver a nivel mínimo del líquido (O cm) y verificar que la cuen
ta en el display DISP1-DISP2 sea 00.
— Calibración del transductor resistivo
Este transductor posee dos tipos de medidor: digital (DISP3-
DISP4) y annálogo (FO-F9). Para calibrar utilícese los poten-
ciómetros P3, P4, P5, P6, P7, P8, P9 y los puntos de prueba
54-, S5, S6, S7, S8. El procedimiento es el siguiente:

-139-
1. A un nivel de líquido de O cm, colocar las puntas de un multíme-
tro digital (en mínima escala Vnr), en los puntos de prueba
S4 y 55. Calibrar el potenciómetro P3 para que el voltaje
entre estos dos puntos, sea OV o muy cercano a este valor.
2. Coloqúese una de las puntas de prueba del multímetro digital
(escala V ) a tierra (carcasa del módulo principal) y el
otro extremo al punto S6. Verifiqúese que el voltaje en
este punto sea aproximadamente OV, si no lo es variar P5
hasta obtenerlo.
3. Subir el nivel del líquido a una altura de 24 crn. En este
punto el voltaje en 56 debe estar en un rango de 3.7 a 4
V, si no lo está aproxímese a este rango mediante P4.
4- Los potenciómetros P6 y P7 ajustan la frecuencia y offset
respectivamente del conversor V/F AD537 para un valor de
voltaje dado. Verificar mediante un osciloscopio que el
punto S7 esté a 10 Khz, si no lo está ajústese al potenciómetro
P6.
5. Con la punta del osciloscopio en S8, verificar que el pulso
T tenga una duración de 10 ras, ajuste a este valor mediantenP8.
Nota: para este último ajuste es necesario utilizar un oscilos-
copio con memoria.
6. P9 calibra la escala análoga (FO-F9). Para una altura máxima
de 24 cm la escala deberá estar indicando el máximo valor.
Como resultado de este procedimiento de calibración, se obtiene
que: para una altura de nivel del líquido de 9 cm el display
DISP3-DIPS4, mostrará la cuenta 00 a 01, y para una altura
de nivel de 24 cm la cuenta deberá ser 99.

-140-
- Calibración del conmutador flotante
El punto de conmutación del relé auxiliar RL se fija mediante
el divisor de tensión R48 - PÍO, el cual opera en un rango de O
a 4 V. Para conmutar el relé auxiliar RL a una altura de nivel
de O a 24 cm, a justar el potenciómetro y obsérvese en el punto de
prueba' S20 el valor fijado para la conmutación (voltaje V de referen-
cia) . Obsérvese en el punto de prueba Sg, el voltaje de entrada
al amplificador operacional.
CUIDADO DEL EQUIPO
La parte que requiere más dedicación en cuanto al mantenimiento
vendría a ser aquella que está en constante contacto con el líquido
(agua); éstas son: el módulo de pruebas y el de bombeo. Se recomienda
no dejar líquido en dichos módulos durante un largo tiempo, pues
el poder corrosivo del agua y la descomposición de la misma podría
traer problemas en el futuro. Queda como recomendación el desocupar
el líquido contenido en las cubetas y limpiar cada uno de los elementos
después de un tiempo prudente.
La acción de los rodamientos en los cabezales de bomba va
desgastando la flexibilidad de las mangueras C-Flex, pues éstas
van perdiendo forma y ceden su geometría original. Luego de cierto
tiempo el fluido no circulará tan bien como antes, se recomienda
dar un corrimiento de posición a la manguera luego de haber sobrepasado
las diez horas de trabajo.

ANEXO B
DIAGRAMAS CIRCUITALES
DIAGRAMAS EQUIPO DE PRUEBAS DEMOSTRATIVO
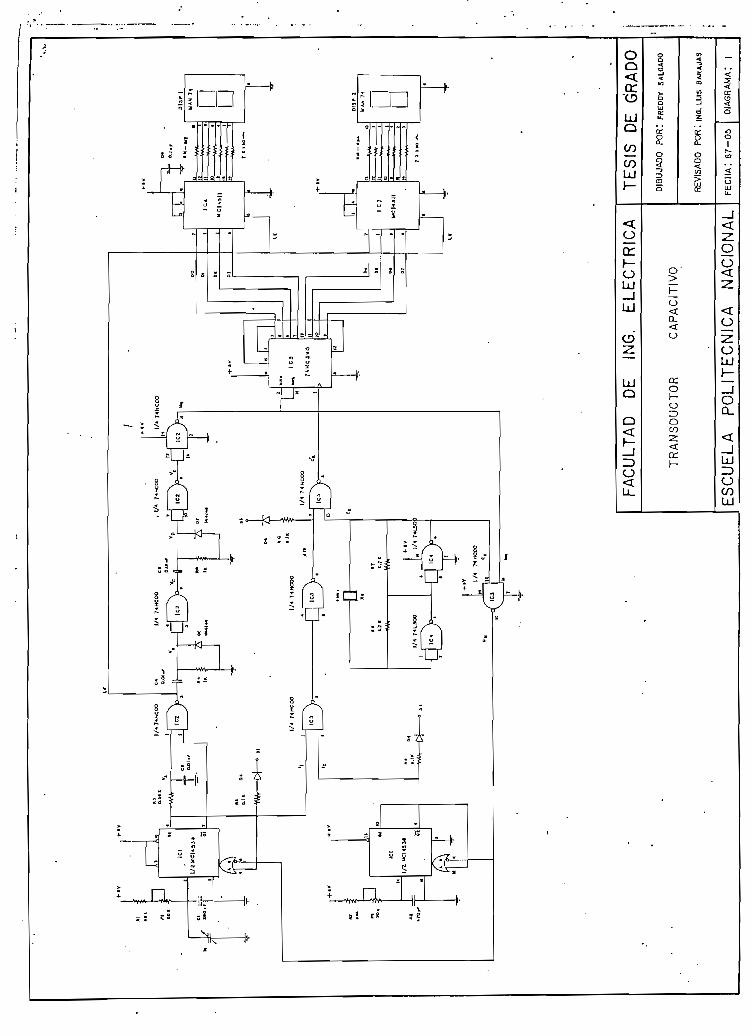
«*.
r
FAC
ULT
AD
D
E
ING
. E
LÉC
TR
ICA
TE
SIS
D
E
tíRA
DO
DIB
UJA
DO
P
OR
! FR
ED
DY
S
ALG
AD
O
TR
AN
SD
UC
TO
R
CA
PA
CIT
IVO
RE
VIS
AD
O
PO
R:
ING
. LU
IS
BA
flAJA
S
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
FEC
HA:
er-
os
DI
AGRA
MA;
j

LE
D
O C
U K
03
IM
Q3
M
Oí
+
BV
FA
CU
LTA
D
DE
IN
G.
EL
ÉC
TR
ICA
IND
ICA
DO
RE
S
AN
ÁLO
GO
Y
D
E
ES
TA
DO
D
E
NIV
EL
D
EL
T
RA
NS
DU
CT
OR
C
AP
AC
ITIV
O
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
TE
SIS
D
E
GR
AD
O
DIB
UJA
DO
P
OR ;
FR
ED
OY
S
ALG
AD
O
RE
VIS
AD
O
PO
R:
(NO
. LU
IS
BA
RA
JAS
FEC
HA:
87
-os
DIA
GR
AMA:
2

,!*>
FA
CU
LTA
D
DE
IN
G.
EL
ÉC
TR
ICA
TE
SIS
D
E
GR
AD
O
DIB
UJ
AD
O
PO
R."
FR
ED
OY
SA
LGA
DO
TR
AN
SD
UC
TO
R
RE
SIS
TIV
O
RE
VIS
AD
O
PO
R.'I
NO
. LU
IS
BA
RA
JAS
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
FEC
HA:
37-
05
DIAG
RAM
A; 3

ti»
-K}-
HT
30.2
K
-i-L E
C
í
Z.Í
K
FA
CU
LTA
D
DE
IN
G.
EL
ÉC
TR
ICA
IND
ICA
DO
RE
S
DIG
ITA
L
Y
AN
ÁL
OG
O
DE
L T
RA
NS
DU
CT
OR
R
ES
IST
IVO
ESCUELA
POLI
TÉCN
ICA
TESIS DE GRADO
DIB
UJA
DO
P
OR
; F
RE
DO
Y S
ALG
AD
O
RE
VIS
AD
O
PO
R:I
HO
. LU
IS
BA
RA
JAS
FEC
HA
: s?
-05
DI
AGRA
MA:
4

t- Is
v +•
lav
3.9
K
no
r— -
vl >
"n
.
\
HS
O
iczj"
"--^
^
•+-
" L
^
f |
m*
o. e
a t
!IK
FA
CU
LTA
D
DE
IN
G.
EL
ÉC
TR
ICA
TE
SIS
D
E G
RA
DO
TR
AN
SD
UC
TO
R
CO
ND
UC
TIV
O
Y
CIR
CU
ITO
C
ON
MU
TA
DO
R
FLO
TA
NT
E
DIB
UJA
DO
P
OR
: F
REDD
Y SA
LGAD
O
RE
VIS
AD
O
PO
R :
wa
LUI
S
BAR
AJAS
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
FEC
HA:
a?
-os
| DI
AGRA
MA:
5

V*'
zzoo
if
/39
V
DIO
—
L-
OZ
liiU
DO
«
f
/ J
3V
IM4
ÍXM
Olí
FA
CU
LTA
D
DE
IN
G.
EL
ÉC
TR
ICA
FU
EN
TE
D
E
PO
DE
R
ES
CU
ELA
P
OLI
TÉ
CN
ICA
N
AC
ION
AL
TE
SIS
D
E G
RAD
O '
DIB
UJA
DO
P
OR
lfR
ED
DY
SA
LGAD
O
RE
VIS
AD
O
PO
R!
ING
. LU
IS
BA
RA
JAS
FECH
A: e
7-o
s D
IAG
RAM
A: e

MO
DU
LO
D
E
PR
UE
BA
S
VlS
lUL
IZ*O
Ofl
D
C
NIV
EL
I *
• O
.3 —
OIU
EH
SIO
HE
S
PC
C*0
>
CU
HE
T*
B*S
£
Í1S
J.A
HIC
P
*«
* E
L
MO
DU
LO
PR
INC
IPA
L
h = 3
4.6
FAC
ULT
AD
D
E
ING
. E
LÉC
TR
ICA
MÓ
DU
LOS
D
E
PR
UE
BA
S
Y
PR
INC
IPA
L
DIM
EN
SIO
NE
S
(cm
) {ESC
,: i :
s)
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
TE
SIS
D
E G
RA
DO
DIB
UJA
DO
P
OR
:FR
ED
DY
SALG
ADO
.
RE
VIS
AD
O
PO
R!
ING
. LU
ts
FECH
A: a
?-0
5 DI
AGRA
MA:
7

VIS
TA
F
RO
NT
AL
O
SIM
UL
AD
OR
P
AR
A
ME
DIC
IÓN
DE
L N
IVE
L
OE
L
ÍQU
IDO
S
VIS
TA
P
OS
TE
RIO
R
tul
IM
(o)
(o)
(o)
©
(o)
(o)
FAC
ULT
AD
D
E
ING
- E
LÉC
TR
ICA
ES
TRU
CTU
RA
-E
XT
ER
NA
D
EL
MO
DU
LO
PR
INC
IPA
L (E
SC
. :
1:2
)
ES
CU
ELA
P
OL
ITÉ
CN
ICA
N
AC
ION
AL
TE
SIS
D
E G
RA
DO
DIB
UJA
DO
P
OR
; FR
ED
DY
S
ALG
AD
O
RE
VIS
AD
O
PO
R ;
1N
O.
LUIS
H
AflA
OA
S
FEC
HA I
87 - 0
5
DIA
GR
AM
A: 8

\f\S
TA
F
RO
NT
AL
V.
LA
TE
RA
L
(Eje
co
rto
)
CB
I
V.
LAT
ER
AL
(Eje
lo
rgo)
,3i/.'l
_
i-
CB
2
PR
INC
IPIO
D
E
OP
ER
AC
IÓN
D
EL
CA
BE
ZA
L
©
ILIX
OK
OI
M
lt"
*M
O
tL
FA
CU
LTA
D
DE
IN
G.
ELÉ
CT
RIC
AT
ES
IS
DE
G
RA
DO
CA
BE
ZA
LES
D
E B
OM
BA
'.
DIM
EN
SIO
NE
S
Y
PR
INC
IPIO
D
E
OP
ER
AC
IÓN
DIB
UJA
DO
P
OR
! Ff
iED
OV
S
ALG
AD
O
RE
VIS
AD
O
PO
R t
IN
G.
LUIS
ES
CU
ELA
P
OLI
TÉ
CN
ICA
N
AC
ION
AL
FE
CH
A.'
87 - 0
5
DIA
GR
AM
A !
9

ANEXO C
LISTA DE ELEMENTOS

LISTA DE ELEMENTOS
RESISTENCIAS
Todas las resistencias son de 1/4 W , y 5% de tolerancia,
Rl 62 K
R2 68 K
R3, R94 = 560 ti
R4, R5, R52, R53, R59, R60 . = 1 K
R6, R7, R50, R68, R74, R98 = 2.7 K
R8 a RIO, R33aR40, R66, R89 a R93 = 5.1 K
Rll a R32, R44 a R45( R75 - R88 = 330 fí *
R41 a R43, R48 = 1.8 K
R47 = 3.9 K
R49, R58, R71, R96 = 22 K
R51; R97 = 680 ü
R54, R64 = 10 K
R55, R57 = 100 K
R56JR63, R72 = 9,1 K
R61, R70, R95 = 3.3 K
R62 . 20 K
R65 92 K
R67 = 470 K
R69 = 1.5 K
R73 = 200 fí
POTENCIÓMETROS
Pl, P2, P7, P8 20 K
P3 = 100 Sí
P4 10 K
P5 50 K
P6, P9, PÍO = 1 K
-152-

-153-
CAPACITORES
Cl
C2
C3 a C5, C17, C18, C26, C27
C6, CIO, C19, C20, C22 a C25
C7 a C9
Gil "a C14
C15
C16, C21
C28
C29 a C32
C33
280 pF (1)
470 pF (1)
0.01 uF (1)
0.1 uF (1)
10 uF (2)
2200 uF/35 V (2)
100 pF (1)
4.7 uF (3)
15 uF (3)
0.1 uF/100 V (1)
25 uF/220 VAC (Aceite)
(1) Capacitor de disco cerámico
(2) Capacitor electrolítico
(3) Capacitor de Tantalium
DI, D2, D7, D13, D15
D3 a D5, D8 a D12
D6
D14-, D16 a D23
L0 a L7, F0 a F9
IB, IN, IS, IP, IF, ICd
Ql, Q3, Q6
Q2, Q4
Q5
IC1, IC16
IC2, IC3
IC4
IC5, IC13
IC6, IC7, IC14, IC15
IC8
IN4148
Diodos de Ge (de señal)
IN6263
IN4004
leds rojos standars
leds verdes stSndars
C945
ECG129
A 639
MC14538 dual monoestable
quad nand gate 74HCOO
74LSOO quad nand gate
74HC390 dual decade Ripple counter
MC14511 BCD-to-seven segment
lach/decoder/driver
74HC374 Octal 3—state noninverting
D-type flip-flop

-154-
IG9
ICIO
IC11
IC12
IC17
IC18
IC19, IC20
IC21
IC22
IC23
IC24
IC25
IC26
IC27
IC28
2716 16K UV Erasable Prom
74HC240 Octal 3-state invertin
buffer/line driver/line recei—
ver
NE5534 single low noise opera-
tional amplifier
AD537 Voltage to frecuency con
verter
CD4011 Quad nand gate
LM3914 Lot/Bar display driver
MC14585 4-bit magnitude compa-
rator
74 HC04 Hex-inverters
74 HC02 Quad 2-input positive-
Ñor gates
LM307 Operational amplifier
LM1830 Fluid detector
uA7805 Positive-voltage regula^
tor
UA7905 Negative-voltage regula
tor
uA7815 Positive-voltage regula
tor
uA7915 Negative-voltage regúla-
te r
OTROS COMPONENTES
Xc
DISP1, DISP2, DISP3, DIPS4
SW1
SW2, SW3, SW4
SW5, SW6
SW7
SW8
B0-B7
4MhZ Cristal clock oscillatore
MAN 74 Displays cátodo común
SPST (3A)
SPDT toggle
Un polo, 3 posiciones
DPDT 10A
DPDT 15A 3/4 HP, 120 VAC, 3 po
siciones
2XSF-21, 2XSF-ÍP Frcm rrount switch -
accessories

-155-
RL = RH2B, 10A, 12VDC relé auxiliar
TI : Vp = 120 V, ip = 0.6A, VAp = 72 VA/VS1 s= 28 V, iSl = 1.2 A,
VAS1 = 34 Va/ VS2 = 38 V, iS2 = VAS2 = 38 VA transformador
FUS1 = 1A fusible
FUS2 = 5A fusible
Tp = Sensor de presión
TCd ss Sensor de conductividad
TR = Sensor resistivo
TC = Sensor capacitivo
CB1 = R-7018-20 cabezal de bomba, eje
corto
CB2 = R-7018-00 cabezal de bomba,
eje largo
MI = 120 V-l/4 HP-1800 rpm motor de
inducción, fase partida, conden
sador permanente
BT = 3L285 Banda de transmisión
ELEMENTOS VARIOS
Placas de baquelita, sockets de ICs, Plugs, etc.

ANEXO D
GUIA DE DISEÑO DE FUENTES REGULADAS
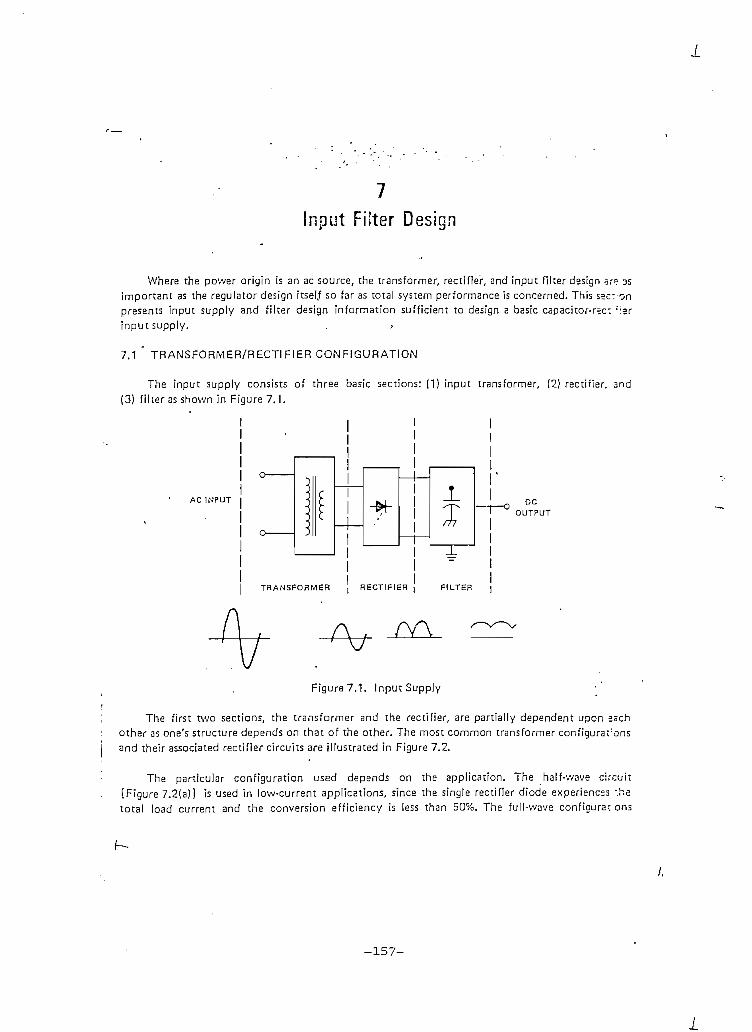
I
Input Fiiter Design
Where the power origin is an ac source, íhe transformer, rectifier, and ¡nput fiííer design 6r= 3simportant as the regulator design itsel,f so far as total system performance is concerned. This sec:-onpresents input supply and filter design Information sufficient to design a basic capacitor-r=c: ::erinput supply. . >
7.1 " TRANSFORMER/RECTIFIER CONFIGURATION
The input suppiy consists of three basic sections: (1) input íransformer, (2) rectifier. and(3) filter as shown in Figure 7,1.
AC INPUT •w- JL
JL
TRANSFORMER RECT1FIER , FILTER ]
Figura 7.1. Input Suppiy
The first two sections, the transformer and íhe rectifier, are partially dependent upon sschoíher as one's structure depends on that of the other. The most common transformer configuraronsand their associated rectifier circuits are illustrated in Figure 7.2.
The particular configuration used depends on the application. The half-vvave circuít[Figure 7.2(a)] is used in low-current applications, since the single rectifier diode experiencss '.hetotal load current and the conversión efficiency is less than 50%. The fuil-wave configura-: ons
-157-

-158-
TRANSFCrt.MSR
SECO,N DAR Y
HALF-WAVE
TRANSFORMER
SECONOARY
ICEHTER TAPPED)
(b) StNGLE-PHASE CENTER-TAPPED FULL-WAVE
TRANSFORMERSECONOARY
LOAD
(e) SINGLE-PHASE FULL-WAVE 8RIDGE
Figure 7.2. Input Supply Transformer/Rectifier Configurations
| [Figures 7.2(b) and 7.2(c)] are used for hígher current applicatíons with the ceMer-tapped versión[Figure 7.2[b)] restricted primarÜy to lovv-voltage appücations. The characteristic outputvoltage vvaveforms of these configurations are illustrated in Figure 7.3.
Before the design of the input supply and its associated filter can be initiated, the voltage,current, and ripple requírements of its load must be fully defined. The load, as far as the inputsupply ¡s concerned, is the regulator control circuit. Therefore, the input requirements of theregulator itself become the governing conditions.

-159-
(NPUTSiGNAL HALF-WAVE fSUUL-WAVE
Figure 7."3. Rectífier Output-Voítage Waveforms
Input Supply
lOUTmax
Regulator Control Circuit
¿IN + 'cCíreg)* !OUT
OUT min =
'OUT max < MAX V IN
'OUT mín V|N mín> V
V
V IN V I N
Because the input requirements of the regulator control circuit govern the input supply andfilter desí.gn, ¡t is easiest to work backwards from the load to the transformer primary.
12 CAPACITOR INPUT FILTER
The most practica! approach to a capacitor-input fílter design remaíns the graphícal approachpresented by Schade in 1943. The curves shown ¡n Figures 7.4 through 7.7 contain all of the deslgn
, Information required for full-wave and half-wave rectified circuits.i
i Figures 7.4 and 7.5 show the relation of de output voltage developed (VQ) to the appíied peak! input voltage (V(pK)) as a functíon of cjCR^ for half-wave and full-wave rectified signáis respec-: tively. For a full-wave rectified application, the voltage reduction ¡s less than 10% f o r u C R [ > 10
and RS/RL < 0.5%. As illustrated, the voltage reduction decreases as ojCRj_ increases or the Rg/Riratio decreases. Minimizing the reduction rate,_comrary to initíal ¡mpressions, may prove to bedetrímental to the optírnum circuít design. Further'reduction requlres a reduction in the series to
load resistance ratio ÍRg/RiJ ^or anV 9'ven ^CR(_. Thís will result in a higher peak-to-average: current ratio through the rectlfier diodes. (See Figure 7.6.) !n additíon and probably of more
concern, this increases the surge current experienced by the rectifier diodes during turn-on of thesupply. Realize thesurge current is iimited only by the series resistance R^:
SURGE'VSEC (PK)

-160-
«L
0.1 0.2 0.4 0.7 1 2 * 7 10 20 4O 70 10O 200 400 7DQ 10OO
_ — C in Fir»d», R (_ in Ohtm, LJ • 2 ÍT (, f - Lín* Fr«qu«ocv
Figure 7.4. Relation of Applied AlternatÜng Peak Voltagato Direct Output Voltage in Half-Wave Capacítor-lnput Circuiti
ÍFrom O. H. Schada, Proc. IRÉ, Vol. 31, p. 343, 1943)
•8=

-161-
0.2 0.4 0.7 1 2
[_— C ¡n
7 10 20 40 70 TOO 20O 400 70O10OO
I_ in Ohm*. u-2 ir f , f - L i n » Fr»qu*ncy
Figure 7.5. Relation of Applied Alternating Peak Voltagato Direct Output Voltaje ín Fuli-Wave Capacítor-lnput Circuíts
ÍFrom O. H. Schada, Proc. IRÉ, Vo!. 31, p. 344, 1943) -

7
Oí to
0,4
0.7
1 2
4 7
10
n .
1
For
H'K
-Wív
» S
ingl
t-P
hJM
Rcc
ufim
Cir
eu
m2
For
Fu
ll-W
iv*
Sin
glc
PK
iv*
R*c
nliK
Cir
cum
70
100
- 200
CJ
7 n
I w
h»r
t I
- Li
n» F
nqu«ncy
in O
hm
j-
RM
S E
qú
\va
|tn
i S
ourc
*
Fig
uro
7.6.
R
elat
íon
of R
MS
and
.Pea
k to
Ave
raga
Dio
do C
urro
nt i
n C
apac
itor
Input
Circ
uits
(Fro
mO
. H
. S
chad
e, P
roc.
IR
É,
Vo
l. 31
, p.
34
5,
19
43
)

-163-
1
0.7
CIRCUIT
HALP-V/AVE
FULL-WAVE
PAñAMETER
[V—10
0.4 0.7 1 2 4 7 10 20 <W 70 100 200 4OO 70O 10OO 2ÜQG
LjCR[_— C In Fatadt, Rj_ ¡n Ofimi, u - 2 ir 1, ( - Lint Frsquancy
Figuro 7.7. Root-Mean-Squara Ripple Voltage for Capacitor-input Circuíts(From O. H. Schade, Proc. IRÉ, Vol. 31, p. 346, 1943}
In arder to control the surge current, additional resistance is often required In series v/ith eachrectifier. It is evident that a compromíse must be made between the volcage reduction and trierectifier current ratings.
is:The máximum instantaneous surge current is
r ^ RSC
As a rule of thumb, the- surge current will not damage the rectífier diode if
'SURGE < ' max and r < 8-3 ms
- The time constant (rí of capacitor C
i

-164-
Fígure 7.7 shows the reíationship of the rípple factor Tf, cjCR|_, and Hg/R[_. The ripple factor(r^) is the ratio of the RMS valué of the rípple component of the output voltage expressed as apercent of the absolute de output voltage. Expressed ín terms of the inpur requirements of theregulator control circuit:
ínX 100%
'IN
S1NGLH-PHASEHALF-WAVE
SINGLE-PHASECENTEH-TAPPED
FULL-WAVE
SINGLE-PHASEFULU-V/AVE
BRIDGE
Figure 7.8. Input Filter Desígn
7.3 DESIGNPROCEDURE
1 . Define the known requirements of the regulator control circuit.
i
IN íreg)
V.
rfín
V IN
'OUT~ 'LOAD (reg)
f - frequency of line voltage
2. Determine Vp. The cholee of VQ may be random or it may be infiuenced by theregulator control circuits recommended VIM. The first approximation of íheacceptance range of VQ ís defined by:
VQ max < The máximum ínput voltage of the regulatorcontrol circuit minus the peak ripple voltageof the filter network.

-165-
VQ min > The mínimum input voltage of the regulatorcontrol circuir plus the peak ripple voltageof the filter network.- •
If a particular valué of VQ within the defined range is not prevalent, choose avaluéfor VQ midway between the limits. *
3. Ser V(pi<) at or near rhe V^ímax) limir allowing for input line variarions.
4. Calcúlate the acceprable ripple facror
' I N
where:
VTM = The de inpur voltage of rhe regulator control circuir.
V-n = The RMS valué of the ripple component of the inputvoltage allowed on the input of the regulator controlcircuit.
= vin (p-p)
m 2V2"
V¡n (D.n) = The peak-to-peak valué of the ripple component ofthe input voltage.
vin (p-p) = Vout (p-pj ' RR
Vout i \ The peak-to-peak valué of the ripple component ofthe output voltage.
RR = The ripple rej'ection factor of the regulator control circuit.
Vout(p-p) " RR
5. Calculare the voltage reduction of the filter circuit.
Voltage Reduction 'IN
'(PK)
6. From Figure 7.7, determine the range of cjCR(_ for equal to 0.1% to 300/0.

-166-
7. From Figure 7.4 or 7.5, as appiicable, narrow the ranoe of RS/RL for tne voltagereduction valué calculated above.""" . - .
8. With the tightened range of RJ/RL/ refer again to Figure 7.7 to further define theacceptable range of cjCR¡__.
Several iterations reviewíng Figures 7.4 or 7.5, and 7.7 may be necessary to definean exact solution for Rg/R[_ and wCRj_ that satisfies the graphs of Figures 7.4, 7.5,and 7.7.
9. Once uCR^ and RS/R|_ nave been determined, calcúlate R[_:
V!N (reg)
'LOAD (reg)
10. Calcúlate oj:
11. Determine C:.
C =
12. Find the allowable series resistance.
Re =<L
13. Determine the peak and'RMS forward current to be experienced by the rectífierdiodes from Figure 7.6.
where;
!F (AV) ~ 'LOAD (reg) for ha'f'wave circuits)
=^ !LOAD (reg) (forfull-wavecircuits)
14. Determine the surge current requíred to be sustained by rectifier diodes.
'SURGEV(PK)

-167-
1 5. Determine the peak ¡nverse voltage of the rectifier circuit.
PIV = V/ f°r íne bridge rectifier circuir
P'IV = 2 for all other rectifier circuits
16. Verify that the voltage reduction of the filter ÍV[p¡<)) and the ripple voltage underworst-case conditions result in an output voltage (Vc) that is satisfactory with theoperating input voltage range of the regulator control circuit.
[V(pK} + A VL|NE] Kp + V¡n (pk) < V,N max (regulator)
ÍY(PK) - A VLINE] KF - Vin ípk) > v[N-mín íregulator)
where:
A VU^E = variation in V/p^j caused by line voltage variatíon
Kp = voltage reduction of the filter section expressed in %
Vírt /„(,! = peak valué of the ripple component of the ¡nput voltage
17. Calcúlate the required secondary voltage (RMSJ of the transformer:
w _ V ÍPK) * VRECT- VSEC (RMS) ~ "7=
where:
VRECT = 2 VF (rectifier) for full'wave brídge circuit ¡=*2 V}
VRECT = 1 VF (rectifier) for other circuits (-1 V)
18. Find the resistance of the secondary:
• RS is the total resistance of the transformer secondar/ and any additionalexternal resistance ín the input supply circuh.
19. The secondary RMS current ¡s:
. - - • Half-wave and full-wave circuit =
• Full-wave bridge circuit= ^T
20. Determine íhe transformer's VA rating.
• Half-wave circuit^ VSEC(RMS)lp(RMS}*
• Full-wave circuit= 2 VSEC(RMS}IF(RMS)'
Full-wave bridge circuits ^2" VSEC(RMS)IF{RMS}'
i ií the RMS lofward current oí trio rectifier íound in itep 13.
'•i -•;
!
¡I S
ANEXO E
PROGRAMACIÓN EPROM

PROGRAMACIÓN EPROM 2716
DIR (Hex)
400401402403404405406407408409410411
412413414415416417418419420421422423424
425426427428429430431432433434435436
437438439440441442443444445446447448449
SALIDA (Hex)
F _ E
F E
F D
F D
F B
F B
F 7
F 7
-169-
DIR (Hex)
450451452452454455456457458459460461
462463464465466467468469470471472473474
475476477478479480481482483484485486
487488489490491492493494495496497498499
SALIDA (Hex)
E F
E FD F
D F
B F
B F
7 F
7 F

-170-
DIR (Hex)
500501502503504505506507508509510511
512513514515516517518519520521522523524
525526527528529530531532533534535536
537538539540541542543544545546547548549
SALIDA (Hex)
01
01
02
02
04
04
08
08
DIR (Hex)
550551552553554555556557558559560561
562563564565566567568569570571572573574
575576577578579580581582583584585586
587588589590591592593594595596597598599
SALIDA (Hex)
10
10
20
.20
40
40
80
90

-171-
DIR (Hex)
600601602603601605606607608609610611
612613614615616617618619620621622623624
625626627628629630631632633634635636
637638639640641642643644645646647648649
SALIDA (Hex)
F E
F E
F C
F C
F_ 8
F 8
F 0
F 0
DIR (Hex)
650651652653654655656657658659660661
662663664665666667668669670671672673674
675676677678679680681682683684685686
687688689690691692693694695696697698699
SALIDA (Hex)
E 0
E 0
C 0
C 0
8 0
-
8 0
0 0
00
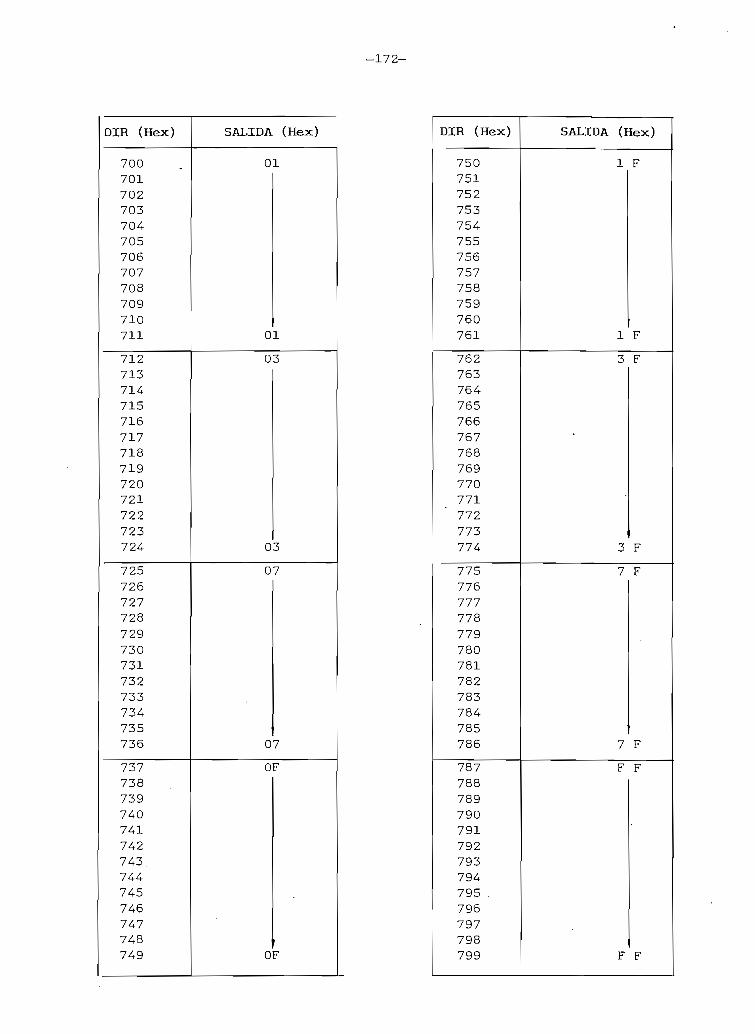
-172-
DIR (Hex)
700701702703704705706707708709710711
712713714715716717718719720721722723724
725726727728729730731732733734735736
737738739740741742743.744745746747748749
SALIDA (Hex)
01
01
03
03
07
07
OF
1
OF
DIR (Hex)
750751752753754755756757758759760761
762763764765766767768769770771772773774
775776777778779780781782783784785786
787788789790791792793794795 .796797798799
SALIDA (Hex)
1 F
1 F
3 F
3 F
7 F
7 F
F F
F F

ANEXO F
CARACTERÍSTICAS FÍSICAS DE VARIOS LÍQUIDOS

m
CARA
CTER
ÍSTI
CAS
FÍSI
CAS
DE V
ARIO
S LÍ
QUID
OS
LIQUIDO
CONSTANTE
Densidad
(gr/cc)
Tensión superficial
(líquido-aire)
Constante
Dieléctrica
Viscosidad
(centi-poisses )
ALCOHOL
ETÍLICO
0.789
23.04
24.30
1.2 - 1.4
ALCOHOL
METÍLICO
0.792
22.61
33.62
0.65 - 0.80
ACEITE
LUBRICANTE
0.88 - 0.94
35 2.2
127.4
GASOLINA
0.70 - 0.75
21.8
1.94
0.48
1-2 PROPILEN
GLICOL
1.04
47.7
37.0 9.35
ACEITE DE
PALMA
0.915
-
69.3





























