-
UNIVERSIDAD CENTRAL DEL ECUADOR
FACULTAD DE INGENIERÍA, CIENCIAS FÍSICAS Y MATEMÁTICA
CONSEJO DE POSGRADO
Metodología para la enseñanza del método de Galerkin para
estudiantes de ingeniería
Trabajo de Titulación previo a la obtención del Título de
Magíster en
Docencia Matemática Universitaria
AUTOR Pozo Rosero Segundo Fabián
TUTOR: Ing. Guillermo Alexis Albuja Proaño
Quito, 2018
-
ii
DERECHOS DE AUTOR
Yo, SEGUNDO FABIÁN POZO ROSERO, en calidad de autor y titular
de
los derechos morales y patrimoniales del trabajo de titulación,
METODOLOGÍA
PARA LA ENSEÑANZA DEL MÉTODO DE GALERKIN PARA ESTUDIANTES
DE INGENIERÍA, modalidad presencial, de conformidad con el Art.
114 del
CÓDIGO ORGÁNICO DE LA ECONOMÍA SOCIAL DE LOS CONOCIMIENTOS,
CREATIVIDAD E INNOVACIÓN, concedo a favor de la Universidad
Central del
Ecuador, una licencia gratuita, intransferible y no exclusiva
para el uso no
comercial de la obra, con fines estrictamente académicos.
Conservo a mi favor
todos los derechos de autor sobre la obra, establecidos en la
normativa citada.
Así mismo autorizo a la Universidad Central del Ecuador para que
realice
la digitalización y publicación de este trabajo de titulación en
el repositorio virtual,
de conformidad a lo dispuesto en el Art. 144 de la Ley Orgánica
de Educación
Superior.
El autor declara que la obra objeto de la presente autorización
es original
en su forma de expresión y no infringe el derecho de autor de
terceros,
asumiendo la responsabilidad por cualquier reclamación que
pudiera
presentarse por esta causa y liberando a la Universidad de toda
responsabilidad.
Segundo Fabián Pozo Rosero
CC: 1001410982
E-mail: [email protected]
mailto:[email protected]
-
iii
APROBACIÓN DEL TUTOR
En mi calidad de Tutor del Trabajo de Titulación, presentado
por
SEGUNDO FABIÁN POZO ROSERO, para optar por el grado de Magíster
en
Docencia Matemática Universitaria; cuyo título es: METODOLOGÍA
PARA LA
ENSEÑANZA DEL MÉTODO DE GALERKIN PARA ESTUDIANTES DE
INGENIERÍA, considero que dicho trabajo reúne los requisitos y
méritos
suficientes para ser sometido a la presentación pública y
evaluación por parte
del tribunal examinador que se designe.
En la ciudad de Quito, a los 20 días del mes de Junio de
2018
Mat. Guillermo Alexis Albuja Proaño. Msc.
DOCENTE-TUTOR
C.C 1712454063
-
iv
DEDICATORIA
A mi hijo Álex Pozo Valdiviezo por ayudarme en todo momento,
también a mi
esposa Belleda Valdiviezo, que me dio todo su apoyo
incondicional.
Segundo Fabián Pozo Rosero
-
v
AGRADECIMIENTOS
Dejo constancia de mi agradecimiento al Director de Tesis Ing.
Alexis
Guillermo Albuja Proaño Msc, por haberme motivado en el tema de
investigación
como también en el asesoramiento y desarrollo del mismo.
Además debo agradecer a los lectores por su valioso aporte que
hicieron en
la revisión de cada uno de los temas propuestos.
-
vi
Índice de Contenidos
DERECHOS DE AUTOR
....................................................................................................................
ii
APROBACIÓN DEL TUTOR
.............................................................................................................
iii
DEDICATORIA
................................................................................................................................
iv
AGRADECIMIENTOS
.......................................................................................................................
v
Índice de Contenidos
....................................................................................................................
vi
LISTA DE TABLAS
...........................................................................................................................
xi
LISTA DE FIGURAS
........................................................................................................................
xii
LISTA DE ANEXOS
........................................................................................................................
xiii
RESUMEN
.....................................................................................................................................xiv
Abstract
........................................................................................................................................
xv
INTRODUCCIÓN
.............................................................................................................................
1
CAPÍTULO I
.....................................................................................................................................
2
1. El problema
............................................................................................................................
2
1.1 Planteamiento del problema
........................................................................................
2
1.2 Formulación del
problema............................................................................................
3
1.3 Justificación e importancia
.................................................................................................
3
1.4 Objetivos
.............................................................................................................................
4
1.4.1 Objetivo General.
.........................................................................................................
4
1.4.2 Objetivos Específicos.
..................................................................................................
4
1.5 Metodología de enseñanza para resolver la ecuación de
difusión-reacción ..................... 4
Planteamiento de la ecuación:
.................................................................................................
5
DESARROLLO DE LA METODOLOGÍA DE ENSEÑANZA
...................................................................
5
Descripción de la ecuación
...................................................................................................
5
Discretización del dominio de la ecuación
...........................................................................
5
Discretización de la variable temporal 𝒕
...............................................................................
6
Discretización de la variable espacial 𝒙:
...............................................................................
6
-
vii
Formulación variacional o débil
............................................................................................
6
Aproximación de la solución por el Método de Galerkin
..................................................... 7
Formulación equivalente
......................................................................................................
7
Formulación matricial
...........................................................................................................
7
Método de elementos finitos
...............................................................................................
7
Construcción de las funciones base
......................................................................................
8
Cálculo de los elementos finitos
...........................................................................................
8
Matriz de rigidez local y de carga
.........................................................................................
8
Ensamblaje de la matriz de rigidez global
............................................................................
9
Ejemplos de prueba para ser comprobados a través del
pseudocódigo en Matlab .......... 10
Pseudocódigo para ser implementado en Matlab
.............................................................
11
Cálculo de errores
...............................................................................................................
11
1.6 Proceso de resolución de la ecuación de difusión-reacción.
............................................ 11
CAPÍTULO II
..................................................................................................................................
14
2. ECUACIÓN DE DIFUSIÓN-REACCIÓN GENERALIDADES
........................................................ 14
2.1. Antecedentes de la investigación
...............................................................................
14
2.2 Descripción de la ecuación de difusión-reacción
unidimensional .................................... 15
2.3 Fluidos
...............................................................................................................................
16
2.4 Principios fundamentales del flujo de fluidos.
........................................................... 17
Procesos de transporte de masa
............................................................................................
19
2.5 Nociones de Ecuaciones Diferenciales Ordinarias
...................................................... 20
Orden de la ecuación diferencial
........................................................................................
20
Grado de una ecuación diferencial
.....................................................................................
21
2.6 Condiciones iniciales y de frontera
...................................................................................
21
2.6.1 Condiciones Iniciales:
.................................................................................................
21
2.6.2 Condiciones de Frontera
............................................................................................
22
2.7 Ecuaciones diferenciales lineales de orden n
...................................................................
23
-
viii
2.7.1 Solución general de una ecuación diferencial lineal
................................................. 24
2.7.2 Método de variación de parámetros
.........................................................................
24
2.8 Métodos para resolver una ecuación diferencial
.............................................................
25
Métodos Numéricos
...............................................................................................................
26
2.8.2 Integración Numérica: Método del trapecio
.............................................................
26
2.8.3 Método de Euler
........................................................................................................
28
Euler Explícito
.....................................................................................................................
28
Explicación del Método
......................................................................................................
30
Método de Euler modificado
..............................................................................................
31
Método Backward Euler (Método implícito de Euler)
........................................................ 31
CAPÍTULO III
.................................................................................................................................
33
3. RESOLUCIÓN DE LA ECUACIÓN DE
DIFUSIÓN-REACCIÓN........................................................
33
3.1 Método de Galerkin y formulaciones
...............................................................................
33
3.2 Discretización de la variable temporal 𝒕, por el método de
Euler implícito ..................... 34
3.3 Solución Analítica de la ecuación de difusión-reacción
semidiscretizada: Método de
Variación de parámetros.
.......................................................................................................
35
3.4 Discretización de la variable espacial 𝒙
............................................................................
37
3.4.1 Formulación variacional o débil
.................................................................................
37
3.4.2 Aproximación de la solución 𝒖 por el método de Galerkin
....................................... 40
CAPÍTULO IV
.................................................................................................................................
44
4. Método de elementos finitos
..................................................................................................
44
4.1 Procedimiento para la construcción de las funciones base con
el MEF. .......................... 44
4.2 Definición de las funciones base
......................................................................................
45
4.3 Propiedades de la matriz de rigidez
.................................................................................
49
4.4 Cálculo de los elementos finitos para la ecuación de
difusión-reacción para la matriz
local de rigidez 𝑨
....................................................................................................................
51
4.4.1 Cálculo de las matrices de rigidez en forma general
................................................. 63
-
ix
4.5 Ensamblaje de la matriz de rigidez
...................................................................................
66
4.5.1 Ensamblaje de la matriz de rigidez global
.................................................................
66
4.6 Cálculo de los elementos finitos de la ecuación de
difusión-reacción para el vector 𝑩 .. 68
4.6.1 Cálculo de la matriz de carga en forma general
........................................................ 76
4.7 Ensamblaje del vector 𝑩
...................................................................................................
77
CAPÍTULO V
..................................................................................................................................
81
5. RESULTADOS
............................................................................................................................
81
5.1 Algoritmo numérico para la ecuación de difusión-reacción
............................................. 81
Algoritmo computacional
...................................................................................................
81
5.2 Algoritmo para el pseudocódigo. (Ver anexo 4)
...............................................................
82
5.3 Flujograma
........................................................................................................................
82
5.4 Ejemplos de prueba para el algoritmo
.............................................................................
84
Ejemplo 1
............................................................................................................................
84
Ejemplo 2:
...........................................................................................................................
87
Ejemplo 3:
...........................................................................................................................
89
Ejemplo 4:
...........................................................................................................................
92
5.5 Cálculo del error de las soluciones numérica y exacta
..................................................... 94
5.6 Gráficas de los errores
..................................................................................................
96
CAPÍTULO VI
...............................................................................................................................
100
6. CONCLUSIONES Y RECOMENDACIONES
................................................................................
100
6.1 CONCLUSIONES
...............................................................................................................
100
6.2 RECOMENDACIONES
.......................................................................................................
100
REFERENCIAS BIBLIOGRÁFICAS
..................................................................................................
102
ANEXOS
......................................................................................................................................
105
Sumatorias
........................................................................................................................
105
Método de integración por partes.
..................................................................................
105
Espacios Vectoriales
.............................................................................................................
107
-
x
Aplicaciones Lineales
............................................................................................................
108
Espacio de las funciones continuas 𝑪([𝒂, 𝒃])
......................................................................
108
Espacios de Hilbert
...............................................................................................................
108
-
xi
LISTA DE TABLAS
Tabla 1. Método del trapecio
...........................................................................
27
Tabla 2. Valores aproximados con el Método de
Euler.................................... 31
Tabla 3. Cálculo de errores para 𝒖𝟓=25sen(x)
................................................ 96
Tabla 4. Cálculo de errores.
.............................................................................
98
-
xii
LISTA DE FIGURAS
Figura 1. Metodología para resolver la Ecuación de Difusión-
Reacción ......... 13
Figura 2. Tipos de flujo
....................................................................................
18
Figura 3. Flujo del agua
...................................................................................
18
Figura 4. Ejemplificación de difusión de tinta en agua
..................................... 19
Figura 5. Clasificación de métodos.
.................................................................
25
Figura 6. Interpretación geométrica de la integral definida
.............................. 26
Figura 7. Método de Euler
...............................................................................
28
Figura 8. Partición del intervalo [0;
0.5]............................................................
29
Figura 9. Partición del Dominio
........................................................................
44
Figura 10. Funciones base
..............................................................................
47
Figura 11. Resumen de funciones test
............................................................ 48
Figura 12. Elementos para las funciones ∅0, ∅(n+1)
.......................................... 48
Figura 13. Elemento genérico de estudio.
....................................................... 50
Figura 14. Funciones base de cada elemento finito.
....................................... 51
Figura 15. Partición dominio.
...........................................................................
68
Figura 16. Representación gráfica del intervalo.
.............................................. 79
Figura 17. Flujograma del algoritmo.
...............................................................
83
Figura 18. Solución exacta y aproximada ‘Ejemplo 1’.
.................................... 86
Figura 19. Solución exacta y aproximada ‘Ejemplo 2’.
.................................... 88
Figura 20. Solución exacta y aproximada ‘Ejemplo 3’.
.................................... 91
Figura 21. Solución exacta y aproximada para ‘Ejemplo 4’.
............................ 93
Figura 22. Error
1-ht.........................................................................................
96
Figura 23. Error
2-ht.........................................................................................
97
Figura 24. Error inferior – ht.
............................................................................
97
Figura 25. Error
1-h..........................................................................................
98
Figura 26. Error
2-h..........................................................................................
99
Figura 27. Error inferior-h.
................................................................................
99
Figura 28. Pseudocódigo en MATLAB de ‘Ejemplo 1’
................................... 111
Figura 29, Pseudocódigo en MATLAB de ‘Ejemplo 2’
................................... 112
Figura 30, Pseudocódigo de MATLAB de ‘Ejemplo 3’.
.................................. 113
Figura 31. Pseudocódigo en MATLAB de ‘Ejemplo 4’
................................... 115
file:///C:/Users/JuanF/Desktop/REVISION%20EMPASTAR/TESIS%20F.P%20REVISION%20EMPASTAR.docx%23_Toc529731666file:///C:/Users/JuanF/Desktop/REVISION%20EMPASTAR/TESIS%20F.P%20REVISION%20EMPASTAR.docx%23_Toc529731667
-
xiii
LISTA DE ANEXOS
ANEXO 1. Funciones continuas
....................................................................
105
ANEXO 2. Nociones de Álgebra lineal y Análisis funcional
........................... 107
ANEXO 3. Nociones de Matrices
...................................................................
109
ANEXO 4. Seudocódigo
................................................................................
109
-
xiv
TÍTULO: Metodología para la enseñanza del método de Galerkin
para
estudiantes de ingeniería.
Autor: Segundo Fabián Pozo Rosero
Tutor: Mat. Guillermo Alexis Albuja Proaño. Msc.
RESUMEN
El trabajo de investigación tuvo como finalidad diseñar la
metodología para la
enseñanza del método de Galerkin para resolver la ecuación de
difusión-
reacción, que sirva de apoyo a los estudiantes de ingeniería;
desarrollando de
forma sistemática cada una de las etapas y dando las
justificaciones respectivas
del por qué se utilizan temas como apoyo a la resolución de la
ecuación.
En base al fundamento teórico, se elaboró la metodología de
enseñanza,
describiendo cada uno de los pasos como: planteo y descripción
de la ecuación,
aplicación del método de Euler implícito para discretizar la
variable temporal,
para la variable espacial se utilizó la formulación variacional,
método de Galrkin,
método de elementos finitos, construcción de las funciones base
y ensamblaje
de matrices para su posterior resolución del sistema de
ecuaciones. Cada una
de las etapas de la metodología se aplicó para resolver la
ecuación de difusión-
reacción, se elabora el algoritmo computacional y pseudocódigo
para Matlab y
luego se dan los resultados e interpretación; y se finaliza con
las conclusiones y
recomendaciones.
DESCRIPTORES: METODOLOGÍA DE ENSEÑANZA/ ECUACIÓN DE
DIFUSIÓN-REACCIÓN/ MÉTODO DE EULER IMPLÍCITO/ MÉTODO DE
GALERKIN / ELEMENTOS FINITOS/ FUNCIONES BASE/ SOLUCIÓN
EXACTA
Y NUMÉRICA.
-
xv
TITLE: Methodology for teaching the Galerkin method for
engineering students
Author: Segundo Fabián Pozo Rosero
Tutor: Mat. Guillermo Alexis Albuja Proaño. Msc.
Abstract
The purpose of this research work was to design the teaching
methodology to
solve the diffusion-reaction equation, which serves as support
for engineering
students; systematically developing each of the stages and
giving the
corresponding reasons why issues are used to support the
resolution of the
equation.
Based on the theoretical basis, the teaching methodology was
elaborated,
describing each of the steps such as: statement and description
of the equation,
application of the implicit Euler method to discretize the time
variable, for the
spatial variable the variational formulation was used, Galerkin
method, finite
element method, construction of base functions and matrix
assembly for later
resolution of the system of equations. Each of the stages of the
methodology was
applied to solve the diffusion-reaction equation, the
computational algorithm and
pseudocode for Matlab was elaborated and then the results and
interpretation
were given; and it ended with the conclusions and
recommendations.
KEY WORDS: TEACHING METHODOLOGY/ DIFUSION-REACTION
EQUATION/ IMPLICIT EULER METHOD/ GALERKIN METHOD / FINITE
ELEMENTS/ BASIC FUNCTIONS/ EXACT AND NUMERICAL SOLUTION.
-
i
INTRODUCCIÓN
METODOLOGÍA PARA LA ENSEÑANZA DEL MÉTODO DE GALERKIN
PARA ESTUDIANTES DE INGENIERÍA
La ecuación de difusión-reacción unidimensional, generalmente es
resuelta sin
una metodología de enseñanza apropiada para comprender, dejando
vacíos de
entendimiento y secuencia de pasos a seguir.
El capítulo I, aborda el Problema: planteamiento, formulación,
objetivos y
justificación. El capítulo II, trata los antecedentes de la
investigación, descripción
de la ecuación, fluidos, principios de conservación y nociones
de ecuaciones
diferenciales. En el capítulo III, se describen los métodos de
Euler implícito, del
trapecio, de Galerkin y formulaciones variacionales. En el
capítulo IV Se
desarrolla el método de elementos finitos, construcción de
funciones base. El
capítulo V, describe el algoritmo y pseudocódigo computacional
para Matlab y
calcular la solución aproximada y exacta, de igual forma para el
cálculo de
errores con sus respectivas gráficas. El capítulo VI se da las
conclusiones y
recomendaciones.
-
ii
CAPÍTULO I
1. El problema
1.1 Planteamiento del problema
Muchos modelos matemáticos surgen como resultado de un
experimento,
pero otros no, de igual forma en unos casos como en las
ecuaciones
diferenciales, es posible calcular la solución analítica, pero
en otros casos como
la ecuación de difusión-reacción unidimensional, no se puede
resolver en forma
exacta y lo único que queda es determinar las soluciones
aproximadas, esto se
logra utilizando los métodos numéricos. “Los métodos numéricos
constituyen
técnicas mediante las cuales es posible formular problemas
matemáticos, de tal
forma que se puedan resolverse utilizando operaciones
aritméticas” ([1], p. 3)
Un modelo matemático se define, de manera general, como una
formulación
o una ecuación que expresa características esenciales de un
sistema físico o
de un proceso en términos matemáticos. ([1], p. 11)
La ecuación de difusión-reacción constituye un modelo
matemático. Hallar
𝑢 = 𝑢(𝑥, 𝑡) tal que
{
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝐶𝐼: 𝑢(𝑥, 0) = 𝑢0(𝑥) = 0
𝐶𝐹: 𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 𝐿]
(1)
Planteada la ecuación de esta forma, no se dispone de una
metodología de
enseñanza para resolverla, por lo que surgen las siguientes
inquietudes: ¿cómo
enseñar a resolver la ecuación?, ¿cómo desarrollar una
metodología de
enseñanza?, ¿qué etapas son necesarias desarrollar? Es aquí
donde se origina
el problema que se plantea como proyecto de investigación,
metodología de
enseñanza para resolver la ecuación de difusión-reacción para
estudiantes de
ingeniería
.
-
iii
Para lograr este propósito se necesita de una metodología de
enseñanza
acorde con el tema en estudio, que sirva de conexión entre lo
conocido y lo
desconocido, lo concreto y lo abstracto, de esta forma
comprender el problema
propuesto. Visto así el panorama, se vislumbra que no todos los
estudiantes
aprenden de la misma forma, cada uno tiene su propio estilo de
aprender y
asimilar los conocimientos por lo que es necesario describir una
metodología
alternativa que permita clarificar la forma de resolver la
ecuación planteada
orientada a los estudiantes de Ingeniería.
1.2 Formulación del problema
¿Cómo diseñar una metodología de enseñanza, para resolver la
ecuación de
difusión-reacción aplicando el método de Galerkin para
estudiantes de
ingeniería?
1.3 Justificación e importancia
En la mayoría de casos se resuelven ecuaciones diferenciales
como resultado
de modelos matemáticos, pues éstas pueden ser de primer grado o
de segundo;
como también de primer o segundo orden en derivadas ordinarias,
cuya forma
de resolver desde que se plantea la ecuación hasta obtener la
solución no es
fácil de comprender ya que en unos casos no es sencillo obtener
la solución,
más aún cuando se necesita tener una buena aproximación. Por lo
que se hace
necesario diseñar una metodología de enseñanza tomando como caso
particular
la ecuación de difusión-reacción.
La metodología de enseñanza donde se hace una descripción del
proceso
para resolver la ecuación de difusión-reacción, está orientada a
los estudiantes
de las ingenierías para que comprendan y asimilen con facilidad
la forma de
resolver la mencionada ecuación.
-
iv
1.4 Objetivos
1.4.1 Objetivo General.
Diseñar una metodología de enseñanza, para resolver la ecuación
de
difusión-reacción aplicando el método de Galerkin para
estudiantes de
ingeniería.
1.4.2 Objetivos Específicos.
Desarrollar cada una de las etapas en forma secuencial la
metodología
de enseñanza para resolver la ecuación de difusión-reacción.
Describir el marco teórico de cada una de las etapas que
permita
fundamentar la metodología de enseñanza.
Resolver la ecuación de difusión-reacción unidimensional
aplicando la
metodología propuesta.
1.5 Metodología de enseñanza para resolver la ecuación de
difusión-
reacción
La metodología de enseñanza que se propone, responde a las
siguientes
interrogantes: ¿Qué se hace?, ¿cómo se hace?, ¿para qué se
hace?, resultados
que se obtienen y los prerrequisitos que son necesarios tener,
para el desarrollo
de cada tema.
Contenidos temáticos de la resolución
Planteamiento de la ecuación
Discretizar la variable temporal 𝑡 a través del método de Euler
implícito.
Solución Analítica: Método de Variación de parámetros
Formulación variacional o débil
Aproximación de la solución 𝑢 por el método de Galerkin
Formulación equivalente y matricial
Método de elementos finitos
-
v
Construcción de las funciones base con el MEF.
Funciones base y propiedades
Cálculo de los elementos finitos y matriz de rigidez local
Ensamblaje de la matriz global y resolución del sistema de
ecuaciones por
Matlab.
Planteamiento de la ecuación:
El problema es hallar la solución 𝑢 = 𝑢(𝑥, 𝑡) tal que
{
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝐶𝐼: 𝑢(𝑥, 0) = 𝑢0(𝑥) = 0
𝐶𝐹: 𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 𝐿]
(1)
DESARROLLO DE LA METODOLOGÍA DE ENSEÑANZA
Descripción de la ecuación
Se describe la ecuación de difusión-reacción, identificando
datos, variables,
condiciones iniciales y de frontera, tipo de ecuación
diferencial, orden y grado,
para saber lo que representa cada uno de sus términos, para este
tema es
necesario tener nociones de Cálculo Diferencial e Integral,
ecuaciones
diferenciales ordinarias y parciales.
Discretización del dominio de la ecuación
En esta etapa se da el proceso de discretización que consiste en
dividir un
sistema físico en una serie de elementos que están conectados
entre sí por
un número discreto de puntos llamados nodos; y, se realiza para
la variable
temporal con el método de Euler implícito, la espacial a través
de establecer
la formulación variacional, aproximación de la solución por
método de
Galerkin, formulación equivalente y matricial; para resolver el
sistema de
ecuaciones dado en forma matricial se aplica el método de
elementos finitos,
con la respectiva construcción de las funciones base y cálculo
de los mismos.
-
vi
Discretización de la variable temporal 𝒕
Se aplica el método de Euler implícito, que utiliza la
definición de pendiente
de una recta tangente que es la derivada de la función en dicho
punto; y de
esta manera se tiene la ecuación que depende sólo de la variable
espacial
𝑑𝑢𝑘𝑑𝑡
=𝑢𝑘+1 − 𝑢𝑘𝑡𝑘+1 − 𝑡𝑘
Que al ser aplicada a la ecuación planteada y luego de
simplificar queda la
siguiente ecuación discretizada en la variable temporal
−𝐸𝑢′′ + 𝐶 𝑢 = 𝑓
Para desarrollar esta sección se necesita conocer el método
implícito de
Euler, definiciones de pendientes y derivadas. Esta ecuación
también se la
resolvió en forma analítica utilizando el método de variación de
parámetros,
desarrollando el proceso que conlleva este método.
Discretización de la variable espacial 𝒙:
Se realiza en las siguientes etapas: Formulación variacional,
aproximación
de la solución por el método de Galerkin, se establece la
formulación
equivalente y matricial, luego se aplica el método de elementos
finitos y todo
el proceso que conlleva describirlo, esta discretización se hace
con el fin de
debilitar progresivamente la suavidad de la solución.
Dependiendo el propósito de la ecuación, se podrá hacer con
líneas
simulando vigas y columnas, con placas simulando losas o
volumétricos que
simulen cuerpos.
Los prerrequisitos para cubrir este tema son: Integración por
partes,
funciones continuas lineales a trozos, propiedades del espacio
de funciones.
Formulación variacional o débil
A la ecuación −𝐸𝑢′′ + 𝐶 𝑢 = 𝑓 se multiplica por una función de
prueba fija 𝑣 ∈
𝑉 , se integra sobre [0,1] y luego se aplica la técnica de
integración por partes
al término que contiene la segunda derivada, con el propósito de
reducir el
orden de la ecuación diferencial y buscar las soluciones al
problema
variacional en el espacio 𝐻01(Ω) y no en el espacio 𝐻2(Ω), el
resultado de
-
vii
hacer este proceso es tener una ecuación diferencial de orden
uno,
expresada en forma débil o variacional.
Aproximación de la solución por el Método de Galerkin
Consiste en buscar una solución aproximada 𝑢ℎ del problema
variacional
anterior, para esto se busca una función en un sub-espacio de
dimensión
finita 𝑢ℎ ∈ 𝑉ℎ y se reemplaza 𝑢ℎ por 𝑣 en la ecuación
variacional, para que
la solución aproximada esté en un sub-espacio finito dimensional
𝑉ℎ y no en
todo el espacio 𝑉 y así poder implementar en un ordenador,
además cada
función 𝑢ℎ ∈ 𝑉ℎ se expresa por una combinación lineal de las 𝑁
funciones.
Formulación equivalente
Se expresa la solución en forma de combinación lineal y se
reemplaza 𝑢ℎ =
∑ 𝛼𝑖∅𝑖(𝑥),𝑛𝑖=1 en la formulación de Galerkin, esto permite
calcular los
coeficientes 𝛼𝑖, llegando así a plantear la formulación de la
ecuación en forma
equivalente.
Formulación matricial
La formulación equivalente anterior se puede expresar en forma
matricial,
tomando en consideración cada uno de los integrales con la
finalidad de tener
un sistema de ecuaciones lineales, es decir se obtiene un
sistema dado en la
forma K𝛼 = 𝑭, o también K𝑈 = 𝑭, donde las coordenadas del vector
incógnita
𝑈 que se vayan a calcular, constituyen los valores de la
solución aproximada.
Método de elementos finitos
Para resolver el sistema de ecuaciones dado en forma matricial
anterior, se
lo hace a través del método de elementos finitos que consiste en
definir
funciones base sobre subregiones del dominio, para esto se
divide el dominio
en subdominios que no estén superpuestos, lo que permite
construir de
manera sistemática las funciones base y aproximar la solución de
problemas
de valor de frontera, estableciendo los nodos y longitud de los
elementos
finitos conocido como paso de malla, ver Figura 11.
-
viii
Construcción de las funciones base
Las funciones base están definidas por:
∅𝑖(𝑥) =
{
0, 𝑠𝑖 𝑥 ≤ 𝑥𝑖−1
𝑥 − 𝑥𝑖−1
ℎ, 𝑠𝑖 𝑥𝑖−1 ≤ 𝑥 ≤ 𝑥𝑖
𝑥𝑖+1 − 𝑥,
ℎ, 𝑠𝑖 𝑥𝑖 ≤ 𝑥 ≤ 𝑥𝑖+1
0, 𝑠𝑖 𝑥 ≥ 𝑥𝑖+1
Luego se construyen sobre cada elemento finito teniendo como
datos las
coordenadas de los nodos y la altura de la ordenada que es 1,
para luego
reemplazar en la formulación matricial.
∅𝑖(𝑥𝑗) = {1 𝑠𝑖 𝑖 = 𝑗, 𝑝𝑎𝑟𝑎 𝑖 = 1,2, … ,𝑁0 𝑠𝑖 𝑖 ≠ 𝑗, 𝑝𝑎𝑟𝑎 𝑗 =
1,2, … ,𝑁
Es necesario tener un gráfico para visualizar mejor el proceso
de construcción
como la fig.10
Cálculo de los elementos finitos
Las funciones calculadas y construidas en el paso anterior sobre
cada
elemento finito, se reemplazan en la ecuación matricial, se debe
observar que
una función comparte dos soportes del elemento finito, por lo
que se tienen
que calcular cuatro elementos que nacen de hacer la combinación
entre ellos
La resolución de los integrales se hace utilizando técnicas
analíticas de
integración y aplicación de la regla del trapecio para funciones
conocidas o
desconocidas, y una vez calculado los elementos se forma la
matriz de rigidez
local; en esta forma los elementos finitos calculados quedan en
función del
paso de malla ℎ, las propiedades de las matrices juegan un papel
importante
porque se reducen algunos cálculos.
El cálculo se hizo para cinco elementos finitos uno por uno; y
luego en forma
general, ver Figura 14.
Matriz de rigidez local y de carga
Para formar la matriz local se analizan cuatro casos del
elemento finito, y dos
para el vector de carga recorriendo todos y cada uno de los
elementos de la
malla, obteniéndose matrices locales de orden 2 × 2 y 2 × 1
-
ix
respectivamente, las mismas que contienen las contribuciones de
cada
elemento finito, donde 𝑢𝑘 permanece fijo.
𝐴𝑖 = [𝑎(𝜙
1, 𝜙
1) 𝑎(𝜙
1, 𝜙
2)
𝑎(𝜙2, 𝜙
1) 𝑎(𝜙
2, 𝜙
2)]
𝐵𝑖 = [𝑏(𝜙
1, 𝜙
1)
𝑏(𝜙2, 𝜙
1)]
Ensamblaje de la matriz de rigidez global
Se establece la matriz global de 𝑛 × 𝑛 y el vector de cargas 𝑛 ×
1, ambos
inicialmente nulos.
𝐾 = [
0000
0000
0000
0000
]
𝐹 = [
0000
]
A continuación se reescribe la ecuación local en términos de la
numeración
global y reemplaza en el sistema matricial de ecuaciones, para
el primer
elemento (primera matriz) se tiene:
[ 𝑘11(1)
𝑘21(1)
00
𝑘12(1)
𝑘22(1)
0 0
0000
0000]
[
𝑢1𝑢2𝑢3𝑢4
] =
[ 𝐹1
(1)
𝐹2(1)
00 ]
Para el segundo elemento (segunda matriz)
[ 0000
0
𝑘11(2)
𝑘21(2)
0
0
𝑘12(2)
𝑘22(2)
0
0000]
[
𝑢1𝑢2𝑢3𝑢4
] =
[ 0
𝐹1(2)
𝐹2(2)
0 ]
-
x
Para el tercer elemento (tercera matriz)
[ 0000
0000
00
𝑘11(3)
𝑘11(3)
00
𝑘11(3)
𝑘11(3)]
[
𝑢1𝑢2𝑢3𝑢4
] =
[ 00
𝐹1(3)
𝐹2(3)]
La matriz global se obtiene agregando las contribuciones de
todos los
elementos, es decir la combinación de las ecuaciones anteriores
dando como
resultado:
[ 𝑘11(1)
𝑘21(1)
00
𝑘12(1)
𝑘22(1)+ 𝑘11
(2)
𝑘21(2)
0
0
𝑘12(2)
𝑘22(2)+ 𝑘11
(3)
𝑘21(3)
00
𝑘12(3)
𝑘22(3)]
[
𝑢1𝑢2𝑢3𝑢4
] =
[ 𝐹1
(1)
𝐹1(1)+ 𝐹1
(2)
𝐹2(2) + 𝐹1
(3)
𝐹2(3)
]
Es decir las matrices se van colocando en la dirección de la
diagonal principal,
resultando una matriz tridiagonal
Se deben tomar en cuenta las condiciones de frontera: en la
primera matriz
el término 𝑎22 y en la última el término 𝑎11.
Todo este proceso genera un sistema lineal de ecuaciones por lo
general muy
grande para ser resuelto a mano, pero con el uso de los
ordenadores un
sistema por ejemplo de 10 000 ecuaciones con 10 000 incógnitas
casi
imposible de resolver a mano, con el uso del computador se
resuelve en
segundos.
Ejemplos de prueba para ser comprobados a través del
pseudocódigo en
Matlab
Se fija una función 𝑢 (𝑥, 𝑡) como solución exacta, que cumpla
las condiciones
iniciales y de frontera, a continuación se deriva con respecto a
la variable 𝑡,
después se deriva dos veces con respecto a la variable 𝑥 y todos
estos
resultados se reemplazan en la ecuación original de
difusión-reacción y de
esta forma se obtiene la solución 𝑓 (𝑥, 𝑡) aproximada, para ser
comparadas
posteriormente, de esta forma es lo que se construye un ejemplo
particular
para la ecuación de difusión-reacción, cuya solución 𝑢 se
conoce.
-
xi
Pseudocódigo para ser implementado en Matlab
Se escribe el pseudocódigo para resolver numéricamente la
ecuación,
utilizando el programa computacional Matlab, para obtener la
solución exacta
y aproximada, también se visualizan las respectivas gráficas
para ver si
coinciden o no, ver anexos.
Cálculo de errores
Primero se hace el cálculo del error en función del paso
temporal ℎ𝑡, con ℎ
constante para 𝑁 = 100, luego el cálculo de errores en función
del paso
espacial ℎ, con ℎ𝑡 constante para 𝑀 = 100 y de esta forma saber
qué tan
lejos están los resultados de la solución exacta en comparación
con la
numérica, los mismos que se muestran en la tabla de anexos.
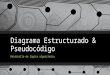
1.6 Proceso de resolución de la ecuación de
difusión-reacción.
Se visualiza en el siguiente cuadro sinóptico:
-
xii
Pro
ce
so
pa
ra r
es
olv
er
la
Ec
ua
ció
n D
ifu
sió
n-
Rea
cc
ión
Descripción y Generalidades de
la Ecuación Difusión-Reacción
Fluidos
Principios
Procesos
Nociones de las EDO
Orden y Grado
CIondiciones Iniciales
Condiciones de frontera
Dirichlet u(0,t)=u(1,t)=0
Neumann
Mixtas
Ecuaciones Diferenciales lineales
de orden n
Método de variación de parámetros
Métodos de Resolución
Analíticos Integración
Por Sustitución
Por partes Se utiliza en la formulación
variacional
De funciones racionales
Numéricos Trapecio
Euler
Explícito
Mejorado
ImplícitoPara discretizar la variable temporal t en
Ecuación Difusión-Reacción
Método de Galerkin y Formulación para
discretizar la variable espacial x.
Discretización de t Euler implícito
Solución Analítica
Método de Variación de parámetros
Discretización espacial
Formulación Variacional o débil
Se necesita: - Espacio Vectorial - Integración por partes - Con
F v(0)=v(1)=0
Método de Galerkin
Se necesita:
Espacio Vectorial Vh, función base li Propiedades del método
Formulación Matricial
Se necesita:
-Matrices
-
xiii
Figura 1. Metodología para resolver la Ecuación de Difusión-
Reacción
Pro
ce
so
pa
ra r
es
ove
r la
Ec
ua
ció
n
Dif
us
ión
-Rea
cc
ión
Método elementos finitos MEF
Construcción de las
funciones base
Dividir el intervalo [0,1]
Definición función base
Propiedades
Matrices de rigidez
propiedades
Sumabilidad
Escasez de números de coeficientes diferentes de cero
Simétrica
Cálculo de los EF
Para cinco elementos
De forma general
Ensamblaje de las matrices de
rigidez
Local
Global
De carga
Resultados
Algoritmo, Flujograma y Pseudocódigo
Ejemplos de prueba
Gráficos e interpretación
-Solución Exacta
-Solución Aproximada
Cálculo de errores
h=cte; N=100, Error 1,2, inferior, ht variable
ht=cte; N=100, Error 1,2, inferior, h variable
Gráficos de errores e
interpretación
Errores en función de ht Método Euler es lineal
Errores en función de h Método Galerkin es
cuadrático
-
xiv
CAPÍTULO II
2. ECUACIÓN DE DIFUSIÓN-REACCIÓN GENERALIDADES
2.1. Antecedentes de la investigación
Según Enrique Zuaza describe de una manera muy resumida la forma
de
obtener aproximaciones finito-dimensionales convergentes de
problemas
variacionales de la forma
{𝑣 ∊ 𝑉
𝐴(𝑢, 𝑣) = 𝐹(𝑣), ∀𝑣 ∊ 𝑉
- Considera una familia de subespacios de dimensión finita 𝑉
- El sistema de ecuaciones que obtiene lo expresa en forma
matricial
([2], p.347)
Según Geovanny Calderón señala que el método de Galerkin se basa
en una
sucesión finita de subespacios de dimensión finita
- Considera un espacio 𝑉 de Hilbert
- Selecciona un conjunto de funciones linealmente independientes
en 𝑉
- Busca la solución 𝑢ℎ ∈ 𝑉ℎ, en la formulación variacional
([3], p.48)
Según Fernando Flores describe que el método de Galerkin se basa
en una
sucesión finita de subespacios de dimensión finita
- Utiliza funciones de base
- Plantea el sistema de ecuaciones en forma matricial
- La matriz de rigidez es simétrica
([4], p.8)
Como se puede observar, hay muy poca información sobre una
metodología de
cómo resolver una ecuación de difusión-reacción, donde se
enfoque a
desarrollar en forma minuciosa cada una de sus etapas.
-
xv
La enseñanza tradicional se ha centrado en la transmisión de
contenidos teóricos
enfocados en la formación profesional del educando
universitario, dejando a un
lado el componente metodológico de enseñanza que se necesita
aplicar en el
aula de clase ([5], p.6)
“Una metodología didáctica supone una manera concreta de
enseñar, método
supone un camino y una herramienta concreta que se utiliza para
transmitir los
contenidos, procedimientos y principios a los estudiantes” ([6],
p.3)
Es decir la metodología es una secuencia de pasos o procesos
bien organizados
y coordinados entre sí, que haya relación y coherencia entre
ellos, y de esta
forma facilitar la comprensión de los mismos. La finalidad o
propósito de una
metodología es que a partir de un proceso detallado, se explique
con claridad los
temas abstractos y los transforme en aspectos entendibles y
claros.
¿Qué significa desarrollar una metodología?
Se requiere de conocimientos previos del tema y poner los
conocimientos
de forma clara, concisa y ordenada a los estudiantes.
Dar en forma coherente y entendible los objetivos, contenidos
y
procedimientos de resolución del problema.
Adaptar los conocimientos al estudiante que se le está
impartiendo
Explicar en forma clara de manera que todos entiendan ([6],
p.69).
2.2 Descripción de la ecuación de difusión-reacción
unidimensional
Los problemas de Fenómenos de Transporte (transferencia de
calor,
movimiento, masa) obedecen a ecuaciones diferenciales tipo
parabólico, dadas
por (1).
𝑑𝑦
𝑑𝑥+ 𝐴(𝑥, 𝑡)
𝑑2𝑦
𝑑𝑥2+ 𝐵(𝑥, 𝑡)
𝑑𝑦
𝑑𝑥+ 𝐶(𝑥, 𝑡) + 𝐷(𝑥, 𝑡) = 0 (1)
Donde 𝑡 es la coordenada temporal; 𝑥 es la coordenada espacial,
estas son
variables independientes, 𝑦 es la variable dependiente. ([7], p.
1)
Si se combinan los procesos de difusión y reacción resulta la
(2)
-
xvi
{ 𝜕𝑡𝑢(𝑥, 𝑡) = 𝐷∆𝑢(𝑥, 𝑡) + 𝑓(𝑢(𝑥, 𝑡)) 𝑒𝑛 Ω × ℝ
+
𝑢(𝑥, 0) = 𝑢0(𝑥) 𝑝𝑎𝑟𝑎 𝑥 ∈ Ω, (2)
{
𝑢(𝑥, 𝑡) = 0 𝑒𝑛 Ω × ℝ+, (𝑝𝑟𝑜𝑏𝑙𝑒𝑚𝑎 𝑑𝑒 𝑑𝑖𝑟𝑖𝑐ℎ𝑙𝑒𝑡 ℎ𝑜𝑚𝑜𝑔é𝑛𝑒𝑜),
𝜕𝑢(𝑥, 𝑡)
𝜕𝑛= 0 𝑒𝑛 Ω × ℝ+, (𝑝𝑟𝑜𝑏𝑙𝑒𝑚𝑎 𝑁𝑒𝑢𝑚𝑎𝑛𝑛 ℎ𝑜𝑚𝑜𝑔é𝑛𝑒𝑜)
([8], p. 3)
Para el presente estudio en particular, se tiene la ecuación de
difusión-
reacción unidimensional que se plantea de la siguiente
manera:
Hallar 𝑢 = 𝑢(𝑥, 𝑡) tal que (3)
{
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝐶𝐼: 𝑢(𝑥, 0) = 𝑢0(𝑥) = 0
𝐶𝐹: 𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 𝐿]
(3)
Donde 𝑢 = 𝑢(𝑥, 𝑡), es la concentración de la especie estudiada
en el fluido;
𝐷, 𝑅 son funciones constantes, 𝑓(𝑥, 𝑡) es la función fuente de
generación del
fluido.
2.3 Fluidos
Fluido es aquella sustancia, que debido a su poca cohesión
intermolecular,
carece de forma propia y adopta la forma del recipiente que lo
contiene. ([9], p.
13), en tal sentido pueden ser líquidos o gases.
Al comparar sólidos, líquidos y gases se observa que:
Los sólidos ofrecen gran resistencia al cambio de forma y
volumen; los
líquidos ofrecen gran resistencia al cambio de volumen, aunque
no en su forma,
los gases no presentan mayor resistencia al cambio de forma y
volumen.
-
xvii
Flujo compresible: La compresibilidad es el cambio de volumen 𝑉
que sufre
una sustancia cuando está expuesta a una presión. Este fenómeno
se mide
con el módulo volumétrico de elasticidad (𝐸) ([10], p. 13) dado
por (1).
𝐸 =−∆𝑝
(∆𝑉)𝑉⁄, ∆𝑉 ≠ 0 (1)
Donde ∆𝑝 representa la variación de la presión, en consecuencia
𝐸 tiene las
mismas unidades que la presión, por cuanto el denominador es
adimensional.
∆𝑉 es la variación del volumen del fluido, 𝑉 representa el
volumen final
Flujo incompresible: Es cuando la densidad del flujo
permanece
aproximadamente constante, de esta manera el volumen permanece
invariable
durante su movimiento. ([11], p. 10)
2.4 Principios fundamentales del flujo de fluidos.
Conservación de la masa.
Energía cinética.
Cantidad de movimiento. ([12], p. 70).
Conservación de la energía: La energía no se crea ni se
destruye; sólo se
transforma, permanece constante; es la misma antes y después de
cada
transformación
Conservación de la masa
La masa no se crea ni se destruye durante un proceso, solo se
transforma
(𝑅𝑎𝑧ó𝑛 𝑑𝑒𝑙 𝑓𝑙𝑢𝑗𝑜 𝑑𝑒 𝑚𝑎𝑠𝑎
𝑞𝑢𝑒 𝑒𝑛𝑡𝑟𝑎 𝑎𝑙 𝑣𝑜𝑙𝑢𝑚𝑒𝑛 𝑑𝑒 𝑐𝑜𝑛𝑡𝑟𝑜𝑙) = (
𝑅𝑎𝑧ó𝑛 𝑑𝑒𝑙 𝑓𝑙𝑢𝑗𝑜 𝑑𝑒 𝑚𝑎𝑠𝑎 𝑞𝑢𝑒 𝑠𝑎𝑙𝑒 𝑑𝑒𝑙 𝑣𝑜𝑙𝑢𝑚𝑒𝑛 𝑑𝑒 𝑐𝑜𝑛𝑡𝑟𝑜𝑙
)
([13], p 389).
Conservación de la cantidad de movimiento
La cantidad de movimiento de un sistema permanece constante
cuando la fuerza
neta que actúa sobre él es cero ([11], p 172).
-
xviii
Flujo de fluidos
Los fluidos pueden fluir en forma permanente o no; uniforme o
variable;
laminar o turbulento; unidimensional, bidimensional o
tridimensional; rotacional
o no.
“Permanente, si el fluido no varía con el tiempo las
características de éste,
como la velocidad y presión, no permanente si su velocidad
cambia. Uniforme
si la velocidad en puntos similares es la misma, no uniforme si
sucede lo
contrario. En la configuración laminar el fluido se mueve en
láminas paralelas
como por ejemplo la glicerina en un recipiente circular,
contrario a la corriente
de régimen turbulento” ([9], pp. 89-90).
En el flujo unidimensional de un fluido incompresible, el
módulo, dirección y
sentido de la velocidad son los mismos ([12], p.71) vista en
Figura 3 y Figura 4
Flujo
{
Permanente: {
La velocidad es contante respecto al tiempo𝜕𝑣
𝜕 𝑡= 0 pero puede variar en el espacio.
No permanente: {
Las condiciones en un punto cambian con el tiempo𝜕𝑣
𝜕 𝑡≠ 0
Uniforme: {El vector velocidad es constante ∂𝑣
∂ s= 0
No uniforme: {El vector velocidad no es constante ∂𝐯
∂ s≠ 0
Figura 2. Tipos de flujo1
Figura 3. Flujo del agua2
3 Basado en: Giles, 1970, p. 71. 2 Basado en: Khan Academy,
s.f.
-
xix
Procesos de transporte de masa
Difusión: Cuando un fluido contiene varios componentes con
concentraciones diferentes en distintos puntos, existe un
proceso de intercambio
de masa en el sistema de la zona de más alta concentración a la
zona de más
baja concentración. ([14], p. 87)
Si un sistema está en equilibrio, la difusión no sucede, este
fenómeno se da
por diferencia de densidades, diferencias de temperatura y de
presión, etc.
Ejemplos de fenómenos de difusión:
Al diluir una cucharada de azúcar en un vaso de agua, las
moléculas de
sacarosa se difunden en el agua.
La difusión de los gases se siente de la persona perfumada, lo
mismo
sucede cuando alguien fuma en un lugar cerrado.
Ver en Figura 4.
Figura 4. Ejemplificación de difusión de tinta en agua3
Reacción: Es el proceso mediante el cual una o más sustancias
se
transforman y dan origen a otras.
En este fenómeno las partículas pueden tener reacciones químicas
o
procesos biológicos, debido a interacciones de manera
espontánea. En un
3 Basado en: (Pngtree, s.f.)
-
xx
modelo poblacional en el que 𝑝(𝑡) representa la densidad de la
población en un
tiempo 𝑡, viene dado por la (4).
𝑑𝑝
𝑑𝑡= 𝑓(𝑝) (4)
Ejemplos físicos de las ecuaciones difusión-reacción son
genética
poblacional, dispersión de mamíferos, etc. ([8], p. 2)
Un fenómeno regido por procesos de difusión y reacción se
caracteriza por la
presencia de distribuciones espacio-temporales de las especies
involucradas.
2.5 Nociones de Ecuaciones Diferenciales Ordinarias
Definición (de ecuación diferencial) Una ecuación que establece
una
relación entre la variable independiente 𝑥 , la función buscada
𝑓(𝑥) y sus
derivadas 𝑦′, 𝑦′′, … , 𝑦(𝑛) se llama ecuación diferencial.
Simbólicamente se expresa así:
𝐹(𝑥, 𝑦, 𝑦1, … , 𝑦𝑛) = 0, con 𝑛 + 2 variables reales y 𝑛 ≥ 1
([15], p.1016).
Ejemplos de ecuaciones diferenciales ordinarias:
𝑦′′ + 3𝑦′ − 5𝑦 = 1
𝑦′′ + 𝑦 = 𝑒𝑥 + 𝑠𝑒𝑛 𝑥
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡), 𝑢 ∊ [0, 𝐿 ] × [0, 𝑇 ]
Orden de la ecuación diferencial
Es el de la derivada de mayor orden contenida en ella y viene
dada por la
máxima derivada de la función incógnita 𝑦 = (𝑓𝑥)
Ejemplos:
𝑦′ = 𝑒𝑥 + 𝑦, 𝑃𝑟𝑖𝑚𝑒𝑟𝑜
𝑦′′ − 𝑦′ = 𝑒𝑥, 𝑆𝑒𝑔𝑢𝑛𝑑𝑜
𝑦′′′ + 2𝑦′′ + 𝑦′ − 2𝑦 = 0, 𝑇𝑒𝑟𝑐𝑒𝑟𝑜
-
xxi
𝑎𝑛(𝑥)𝑑𝑛𝑦
𝑑𝑥𝑛+ 𝑎𝑛−1(𝑥)
𝑑𝑛−1𝑦
𝑑𝑥𝑛−1+⋯ , 𝑎1(𝑥)
𝑑𝑦
𝑑𝑥+ 𝑎0(𝑥) = 0, 𝑂𝑟𝑑𝑒𝑛 𝑛
([16], p. 37)
Grado de una ecuación diferencial
Es el exponente de la derivada de más alto orden.
Ejemplos:
(𝑑𝑦
𝑑𝑥)4
+ (𝑑2𝑦
𝑑𝑥2)3
+ 𝑦 = 𝑒3𝑥 Segundo orden y tercer grado
(𝑦′)5 + (𝑦′′)2 + (𝑦′′′)4 = 5𝑒𝑥 Tercer orden y cuarto grado
Se llama solución de la ecuación diferencial a una función ∅
definida en el
intervalo real 𝐼 que tiene derivada hasta el orden 𝑛, si la
sustitución
𝑦 = ∅(𝑥) , 𝑦′ = ∅′(𝑥),… , 𝑦(𝑛) = ∅(𝑛)(𝑥) , para cada 𝑥 de 𝑓
convierte la
ecuación 𝐹(𝑥, 𝑦, 𝑦′, … , 𝑦(𝑛)) = 0 en una identidad.
2.6 Condiciones iniciales y de frontera
A más de calcular las soluciones generales, interesa determinar
las soluciones
particulares de la ecuación propuesta, que satisfagan ciertas
condiciones que se
imponen al momento de resolver la ecuación diferencial; y pueden
ser iniciales y
de frontera. ([16], p. 38)
2.6.1 Condiciones Iniciales:
Se dan para hallar las soluciones particulares, ya que sin
éstas, sólo se
obtienen soluciones en forma general. Un problema con
condiciones iniciales se
denomina de Cauchy.
Se pide resolver 𝑦′ = 𝜑(𝑥, 𝑦) , esta ecuación tiene infinito
número de
soluciones y lo que desea es calcular una solución que satisfaga
una condición
inicial de la forma 𝑦(𝑥0) = 𝑦0.
-
xxii
Al conjunto:
{ 𝑦′ = 𝜑(𝑥, 𝑦),
𝑦(𝑥0) = 𝑦0 (3)
Se denomina problema de valor inicial. ([17], p. 8)
Un ejemplo es la ecuación de difusión-reacción:
{
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝐶𝐼: 𝑢(𝑥, 0) = 𝑢0(𝑥) = 0
𝐶𝐹: 𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 𝐿]
(4)
2.6.2 Condiciones de Frontera
Hay tres tipos principales de condiciones de frontera, llamadas
también
condiciones de contorno o de borde, sirven para relacionar la
interacción del
fenómeno con el medio o entorno que lo rodea. Es una condición
que la solución
debe cumplir o satisfacer en dos o más puntos; y son: De
Dirichlet, Neumann y
Mixtas.
Condición de Dirichlet
{−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[𝑢 = 𝑔
Si 𝑔 = 0, se llama condición de frontera de Dirichlet homogénea
esto implica
que 𝑢 = 0, ejemplo:
{ 𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0,
Si 𝑔 ≠ 0 se denomina condición de frontera de Dirichlet no
homogénea, es
decir 𝑢 = 𝑔, ejemplo:
{
−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[
𝑢(0) = 𝑎 𝑢(𝐿) = 𝑏
-
xxiii
Condición de Neumann
{−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[
𝑢′ = 𝑔
Luego si 𝑔 = 0 , implica que 𝑢′ = 0 , se llama condición de
Neumann
homogénea, ejemplo:
{−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[
𝑢′(0) = 𝑢′(𝐿) = 0
En cambio si 𝑔 ≠ 0 se denomina condición de Neumann no
homogénea
ejemplo:
{
−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[
𝑢′(0) = 𝑎 𝑢′(𝐿) = 𝑏
Condiciones mixtas
Es la combinación de las dos anteriores, que satisfacen la
siguiente relación
ejemplo:
{
−𝑢′′ + 𝑐𝑢 = 𝑓 𝑠𝑜𝑏𝑟𝑒 ]0, 𝐿[
𝑢(0) = 𝑎 𝑢′(𝐿) = 𝑏
2.7 Ecuaciones diferenciales lineales de orden n
Son de la forma
𝐿(𝑦) = ℎ
Donde 𝐿 es un operador diferencial lineal de orden 𝑛 de la
forma:
𝑎𝑛(𝑥)𝐷𝑛 + 𝑎𝑛−1(𝑥)𝐷
𝑛−1 +⋯+ 𝑎1(𝑥)𝐷 + 𝑎0(𝑥),
La ecuación diferencial 𝐿(𝑦) = ℎ se escribe también en la
forma.
[(𝑎𝑛(𝑥)𝐷𝑛 + 𝑎𝑛−1(𝑥)𝐷
𝑛−1 +⋯+ 𝑎1(𝑥)𝐷 + 𝑎0(𝑥)](𝑦(𝑥)) = ℎ(𝑥)
O también
𝑎𝑛(𝑥)𝑦𝑛(𝑥) + 𝑎𝑛−1(𝑥)𝑦
𝑛−1 +⋯+ 𝑎1(𝑥)𝑦′(𝑥) + 𝑎0(𝑥)𝑦(𝑥) = ℎ(𝑥)
-
xxiv
𝑎𝑛(𝑥)𝑑𝑛𝑦
𝑑𝑥𝑛+ 𝑎𝑛−1(𝑥)
𝑑𝑛−1𝑦
𝑑𝑥𝑛−1+⋯+ 𝑎1(𝑥)
𝑑𝑦
𝑑𝑥+ 𝑎0(𝑥))(𝑦(𝑥)) = ℎ(𝑥)
([17], p. 107)
2.7.1 Solución general de una ecuación diferencial lineal
𝑦′′ + 𝑝(𝑥)𝑦′ + 𝑞(𝑥)𝑦 = 𝑓(𝑥)
La solución general viene dada como la suma de una solución
homogénea
asociada 𝑦ℎ(𝑥), más una particular 𝑦𝑝(𝑥).
𝑦𝐺(𝑥) = 𝑦ℎ(𝑥) + 𝑦𝑝(𝑥)
Donde 𝑦ℎ = 𝐶1𝑦1 + 𝐶2𝑦2, 𝑦𝑝 = 𝑢1𝑦1 + 𝑢2𝑦2
2.7.2 Método de variación de parámetros
Se utiliza para determinar la solución particular no homogénea
𝐿(𝑦) = ℎ(𝑥)
de la forma 𝑦𝑝(𝑥) = 𝑐1(𝑥)𝑢1(𝑥) + 𝑐2(𝑥)𝑢2(𝑥) + ⋯+ 𝑐𝑛(𝑥)𝑢𝑛(𝑥)
donde
𝑐1(𝑥) + 𝑐2(𝑥) + ⋯+ 𝑐𝑛(𝑥). Son funciones, además se calcula la
solución
homogénea asociada 𝑦ℎ(𝑥), la solución general se expresa
como:
𝑦𝐺(𝑥) = 𝑦ℎ(𝑥) + 𝑦𝑝(𝑥)
𝑦ℎ(𝑥) se calcula utilizando el anulador, y 𝑦𝑝(𝑥) se calcula
resolviendo el
siguiente sistema de ecuaciones:
{
𝑐1′(𝑥)𝑢1(𝑥) + 𝑐2
′ (𝑥)𝑢2(𝑥) + ⋯+ 𝑐1′(𝑥)𝑢𝑛(𝑥) = 0
𝑐1′(𝑥)𝑢1
′ (𝑥) + 𝑐2′ (𝑥)𝑢2
′ (𝑥) + ⋯+ 𝑐𝑛′ (𝑥)𝑢𝑛
′ (𝑥) = 0⋮
𝑐1′(𝑥)𝑢1
(𝑛−1)(𝑥) + 𝑐2′ (𝑥)𝑢2
(𝑛−1)(𝑥) + ⋯+ 𝑐𝑛′ (𝑥)𝑢𝑛
(𝑛−1)(𝑥) = 𝑓(𝑥)
Cuyo proceso siguiente es:
i. Hallar 𝑦1, 𝑦2, … , 𝑦𝑛 soluciones linealmente independientes
de la
ecuación homogénea asociada 𝑦′′ + 𝑝(𝑥)𝑦′ + 𝑞(𝑥)𝑦 = 0, de la
forma
𝑦ℎ = 𝐶1𝑦1 + 𝐶2𝑦2 +⋯+ 𝐶𝑛𝑦𝑛 utilizando el operador anulador.
ii. Determinar el Wronskiano dado por 𝑊[𝑦1, 𝑦2, … , 𝑦𝑛]
iii. Hallar 𝑢1′ , 𝑢2
′ , … , 𝑢𝑛′
iv. Se integran 𝑢1′ , 𝑢2
′ , … , 𝑢𝑛′ para hallar 𝑢1, 𝑢2, … , 𝑢𝑛
v. Determinar la ecuación particular 𝑦𝑝 = 𝑢1𝑦1 + 𝑢2𝑦2 +⋯+
𝑢𝑛𝑦𝑛
-
xxv
Este método se lo utiliza para resolver en forma analítica la
ecuación de
difusión-reacción luego de ser discretizada tanto por Euler
implícito como por el
de Galerkin.
2.8 Métodos para resolver una ecuación diferencial
Son los analíticos que se basan en la integración, pero son
limitados porque
no se dispone para todos los casos que se presenta una ecuación
diferencial, de
un método que determine la solución exacta, por lo que es
necesario determinar
soluciones aproximadas a las ecuaciones planteadas, esto se lo
hace a través
de los métodos numéricos según la Figura 5.
𝑀é𝑡𝑜𝑑𝑜𝑠 𝑑𝑒 𝑠𝑜𝑙𝑢𝑐𝑖ó𝑛
{
𝐴𝑛𝑎𝑙í𝑡𝑖𝑐𝑜𝑠 {
𝑀é𝑡𝑜𝑑𝑜 𝑑𝑒 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑐𝑖ó𝑛 𝑝𝑜𝑟 𝑠𝑢𝑠𝑡𝑖𝑡𝑢𝑐𝑖ó𝑛 𝑀é𝑡𝑜𝑑𝑜 𝑑𝑒 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑐𝑖ó𝑛 𝑝𝑜𝑟
𝑝𝑎𝑟𝑡𝑒𝑠 𝐼𝑛𝑡𝑒𝑔𝑟𝑎𝑐𝑖ó𝑛 𝑑𝑒 𝑓𝑢𝑛𝑐𝑖𝑜𝑛𝑒𝑠 𝑟𝑎𝑐𝑖𝑜𝑛𝑎𝑙𝑒𝑠
𝑁𝑢𝑚é𝑟𝑖𝑐𝑜𝑠
{
𝑀é𝑡𝑜𝑑𝑜 𝑑𝑒 𝐸𝑢𝑙𝑒𝑟 {
𝐸𝑥𝑝𝑙í𝑐𝑖𝑡𝑜 𝑀𝑒𝑗𝑜𝑟𝑎𝑑𝑜
𝐼𝑚𝑝𝑙í𝑐𝑖𝑡𝑜{𝐷𝑖𝑠𝑐𝑟𝑒𝑡𝑖𝑧𝑎𝑟 𝑡
𝑀é𝑡𝑜𝑑𝑜 𝑑𝑒𝑙 𝑡𝑟𝑎𝑝𝑒𝑐𝑖𝑜{𝐶á𝑙𝑐𝑢𝑙𝑜 𝑑𝑒 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑙𝑒𝑠 𝐸𝐹
Figura 5. Clasificación de métodos.
2.8.1 Métodos analíticos: Método de integración por partes.
El método de integración por partes, es conveniente describirlo,
porque es
utilizado para la integración de la ecuación diferencial
difusión-reacción
cuando se hace la formulación variacional. Ver anexo 1
Sean 𝑢 𝑦 𝑣 dos funciones derivables con respecto a 𝑥
∫𝑢𝑑𝑣 = 𝑢𝑣 − ∫𝑣𝑑𝑢 + 𝐶
([15], p.904)
-
xxvi
Métodos Numéricos
2.8.2 Integración Numérica: Método del trapecio
Por definición si 𝑓es continua en [𝑎, 𝑏], la integral definida ∫
𝑓(𝑥)𝑑𝑥𝑏
𝑎 es
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= lim
‖∆𝑥‖→0∑ 𝑓(𝑥𝑖)∆𝑥𝑖𝑛𝑖=1 . Ver Figura 6.
Figura 6. Interpretación geométrica de la integral definida
Aplicando la integral definida
∫ 𝑓(𝑥)𝑏
𝑎𝑑𝑥 = ∫ 𝑓(𝑥)
𝑥1
𝑎𝑑𝑥 + ∫ 𝑓(𝑥)
𝑥2
𝑥1𝑑𝑥 +⋯+ ∫ 𝑓(𝑥)
𝑥1
𝑥𝑖−1𝑑𝑥 +⋯+ ∫ 𝑓(𝑥)
𝑏
𝑥𝑛−1𝑑𝑥
(1)
Como el área de cada trapecio es
1
2[𝑓(𝑥0) + 𝑓(𝑥1)]∆𝑥;
1
2[𝑓(𝑥1) + 𝑓(𝑥2)]∆𝑥…;
1
2[𝑓(𝑥𝑛−1) + 𝑓(𝑥𝑛)]∆𝑥
∫ 𝑓(𝑥)𝑏
𝑎𝑑𝑥 ≈
1
2[𝑓(𝑥0) + 𝑓(𝑥1)]∆𝑥 +
1
2[𝑓(𝑥1) + 𝑓(𝑥2)]∆𝑥 + ⋯+
1
2[𝑓(𝑥𝑛−2) +
𝑓(𝑥𝑛−1)]∆𝑥 +1
2[𝑓(𝑥𝑛−1) + 𝑓(𝑥𝑛)]∆𝑥 (2)
∫ 𝑓(𝑥)𝑏
𝑎𝑑𝑥 =
1
2 ∆𝑥[𝑓(𝑥0) + 2𝑓(𝑥1) + 2𝑓(𝑥2) + ⋯+ 2𝑓(𝑥𝑛−1) + 𝑓(𝑥𝑛)] (3)
([18], p.593)
-
xxvii
Ejemplo:
Calcular la siguiente integral para 𝑛 = 6, determinar el valor
aproximado y
exacto con 3 cifras decimales y comparar los resultados:
∫𝑑𝑥
16 + 𝑥2
3
0
Solución:
El intervalo de integración es [𝑎, 𝑏] = [0,3] y 𝑛 = 6,
∆𝑥 = 𝑏 − 𝑎
𝑛=3
6= 0.5
∫𝑑𝑥
16 + 𝑥2≈0.5
2[𝑓(𝑥0) + 2𝑓(𝑥1) + 2𝑓(𝑥2) + 2𝑓(𝑥3) + 2𝑓(𝑥4) + 2𝑓(𝑥5) +
𝑓(𝑥6)]
3
0
𝑓(𝑥) = 1
(16 + 𝑥2)
El estudiante debe realizar el desarrollo del proceso para
obtener la siguiente
tabla de valores y de esta manera comprender con facilidad la
regla del trapecio.
Tabla 1. Método del trapecio
𝑖 𝑥𝑖 𝑓(𝑥𝑖) 𝑘 𝑘 ∙ 𝑓(𝑥𝑖)
0 0.0 0.0625 1 0.0625
1 0.5 0.0615 2 0.1231
2 1.0 0.0588 2 0.1176
3 1.5 0.0548 2 0.1096
4 2.0 0.0500 2 0.1000
5 2.5 0.0449 2 0.0899
6 3.0 0.0400 1 0.0400
Suma: 0.6427
∫𝑑𝑥
16 + 𝑥2≈ 0.25(0.6427) ≈ 0.1607
3
0
Cálculo del valor exacto:
∫𝑑𝑥
16 + 𝑥2
3
0
=1
4𝑡𝑎𝑛−1 (
𝑥
4)|0
3
-
xxviii
=1
4𝑡𝑎𝑛−1 (
3
4) −
1
4𝑡𝑎𝑛−1 (
0
4)
≈ 0.161
Se concluye que la solución aproximada está muy cerca de la
solución exacta.
([18], p.594).
2.8.3 Método de Euler
Euler Explícito
Se ilustra en la Figura 7.
Figura 7. Método de Euler
Este método sirve para resolver un problema de valor inicial
PVI:
{
𝑦′ = 𝑓(𝑥, 𝑦)
𝑦(𝑥0) = 𝑦0
𝑦(𝑥𝑖) =?
Deducción de la fórmula
Se toma una recta suave que pase por 𝑃0(𝑥0, 𝑦0) cuya pendiente
sea
𝑓(𝑥0, 𝑦0) =𝑦1 − 𝑦0𝑥1 − 𝑥0
𝑦1 = 𝑦0 + ℎ. 𝑓(𝑥0,𝑦0), ℎ = 𝑥1 − 𝑥0
Se utiliza 𝑦1 para calcular 𝑓(𝑥1, 𝑦1)
𝐶𝑢𝑟𝑣𝑎 𝑠𝑜𝑙𝑢𝑐𝑖ó𝑛
𝑅𝑒𝑐𝑡𝑎 𝑡𝑎𝑛𝑔𝑒𝑛𝑡𝑒
𝑥0 𝑥1
𝑦0
𝑦1
𝐴𝑝𝑟𝑜𝑥𝑖𝑚𝑎𝑐𝑖ó𝑛 𝑑𝑒 𝑦(𝑥)
-
xxix
Con el punto (𝑥1, 𝑦1), se calcula 𝑦2 = 𝑦1 + ℎ. 𝑓(𝑥1,,𝑦1) para
obtener (𝑥2, 𝑦2),
Con el punto (𝑥2, 𝑦2), se calcula 𝑦3 = 𝑦2 + ℎ. 𝑓(𝑥2,,𝑦2) para
obtener (𝑥3, 𝑦3),
tal que:
𝑦1 = 𝑦0 + ℎ. 𝑓(𝑥0,𝑦0)
𝑦2 = 𝑦1 + ℎ. 𝑓(𝑥1,,𝑦1)
𝑦3 = 𝑦2 + ℎ. 𝑓(𝑥2,,𝑦2)
…
𝑦𝑛+1 = 𝑦𝑛 + ℎ𝑓(𝑥𝑛, 𝑦𝑛), ℎ = 𝑥𝑛+1 − 𝑥𝑛 𝐸𝑐. 3.
([19], p.340)
Si ℎ es pequeño se tendrá una aproximación buena. Pero si ℎ es
más grande,
entonces se habrá mucho error.
Ejemplo: Se pide aproximar 𝑦(0,5) en:
{ 𝑦′ = 𝑦
𝑦(0) = 1
Solución analítica.
𝑑𝑦
𝑑𝑥= 𝑦 →
𝑑𝑦
𝑦= 𝑑𝑥 ; 𝑙𝑛|𝑦| = 𝑥 + 𝑐 → 𝑦 = 𝑐𝑒𝑥
Como 𝑦(0) = 1 ; 1 = 𝑐𝑒0 ; 𝑐 = 1, luego 𝑦 = 𝑒𝑥, 𝑦(0.5) = 𝑒0.5 =
1.64872.
Solución numérica, ver Figura 8.
Figura 8. Partición del intervalo [0; 0.5]
0 = 𝑥0 𝑥1 𝑥2 𝑥3 𝑥4 𝑥5 = 0.5
-
xxx
ℎ =𝑏 − 𝑎
𝑛 ; ℎ =
0.5 − 0
5 ; ℎ = 0.1
Usar el método de Euler para obtener una aproximación a cuatro
decimales
del valor indicado. Determinar la solución explícita para el
problema de valor
inicial y después construir una tabla de los valores
obtenidos.
{
𝑦′ = 𝑦
𝑦(0) = 1
𝑦(0,5) =?
Explicación del Método
i. Escribir la ecuación diferencial en la forma 𝑑𝑦
𝑑𝑥= 𝑓(𝑥, 𝑦)
𝑑𝑦
𝑑𝑥= 𝑦
ii. Definir 𝑥0, 𝑦0, ℎ de acuerdo a los datos del problema
𝑥 0 = 0, 𝑦0 = 0, ℎ = 0,1
iii. Plantear la ecuación de Euler utilizando los datos
iniciales
𝑦0+1 = 𝑦0 + ℎ 𝑓(𝑥 0, 𝑦 0)
𝑦1 = 𝑦0 + ℎ 𝑓(𝑥 0, 𝑦 0)
𝑦1 = 1 + 0,1 (1)
Una vez obtenido este primer resultado se repite el proceso
iteradamente,
utilizando los nuevos datos.
iv. Desarrollar el método hasta el valor buscado 𝑥, en esta caso
𝑥 = 0,5
Por lo tanto el proceso que se debe iterar es:
{
𝑥0 = 0 𝑥𝑘+1 = 𝑥𝑘 + 0.1, 𝑘 = 0, 1, … , 𝑛 − 1
𝑦𝑘+1 = 𝑦𝑘 + ℎ𝑓(𝑥𝑘, 𝑦𝑘)
𝑦𝑘+1 = 𝑦𝑘 + 0,1(𝑦𝑘) = 1,1𝑦𝑘
Para lograr una mejor comprensión, el estudiante debe realizar
el desarrollo
del proceso para obtener la siguiente tabla de valores
-
xxxi
Tabla 2. Valores aproximados con el Método de Euler
𝑘 𝑥𝑘+1 𝑦𝑘+1 Valor exacto
0 1 1
0 0+0.1=0.1 1+0.1(1)=1.1 1.10517
1 0.1+0.1=0.2 1.1+0.1(1.1)=1.21 1.22140
2 0.2+0.1=0.3 1.21+0.1(1.21)=1.331 1.34985
3 0.3+0.1=0.4 1.331+0.1(1.331)=1.4641 1.49182
4 0.4+0.1=0.5 1.4641+0.1(1.4641)=1.61051 1.64872
La solución aproximada es 𝑦(0.5) ≅ 1.61051
Método de Euler modificado
Aquí se utiliza el promedio de las pendientes o derivadas de las
rectas
trazadas
Para el método mejorado se tiene
𝑦1∗ = 𝑦1 + ℎ𝑓(𝑥0, 𝑦0)
𝑦1 = 𝑦0 +(𝑥1 − 𝑥0)
2[𝑓(𝑥0, 𝑦0) + 𝑓(𝑥1, 𝑦1)]
𝑦𝑛+1∗ = 𝑦𝑛 + ℎ𝑓(𝑥𝑛, 𝑦𝑛)
𝑦𝑛+1 = 𝑦𝑛 +ℎ
2[𝑓(𝑥𝑛, 𝑦𝑛) + 𝑓(𝑥𝑛+1, 𝑦𝑛+1
∗ )], 𝑛 = 0,1, … , 𝑛 − 1
([19], p.342)
Método Backward Euler (Método implícito de Euler)
El método de Euler implícito se lo utiliza para realizar la
discretización de la
variable temporal 𝑡 en la ecuación de difusión-reacción.
Partiendo de la fórmula del Euler explícito
𝑦𝑛+1 = 𝑦𝑛 + ℎ𝑓(𝑥𝑛, 𝑦𝑛)
Se hace pasar la recta tangente por el punto (𝑥𝑛+1, 𝑦𝑛+1) y se
obtiene:
𝑓(𝑥𝑛+1, 𝑦𝑛+1) =𝑦𝑛+1 − 𝑦𝑛𝑥𝑛+1 − 𝑥𝑛
-
xxxii
𝑦𝑛+1 = 𝑦𝑛 + ℎ. 𝑓(𝑥𝑛+1, 𝑦𝑛+1) 𝑐𝑜𝑛 ℎ = 𝑥𝑛+1 − 𝑥𝑛
([20], p. 3)
“La diferencia entre el método explícito y el implícito de
Euler, es que en el
método explícito utiliza la pendiente en 𝑥𝑛 para obtener el
nuevo punto 𝑦𝑛+1. El
Euler implícito utiliza la pendiente en el punto xn+1 , para
obtener el nuevo
punto 𝑦𝑛+1 por tanto este método da mejores resultados expresado
en (4)” ([21],
p. 128)
𝑦𝑛+1 = 𝑦𝑛 + ℎ𝑓(𝑥𝑛, 𝑦𝑛) (4) Método explícito
𝑦𝑛+1 = 𝑦𝑛 + ℎ. 𝑓(𝑥𝑛+1, 𝑦𝑛+1), cuando pasa por el punto (𝑥𝑛+1,
𝑦𝑛+1)
𝑦𝑛+1 = 𝑦𝑛 + ℎ. 𝑓(𝑥𝑛+1, 𝑦𝑛 + ℎ𝑓(𝑥𝑛+1, 𝑦𝑛+1)) Método implícito
-
xxxiii
CAPÍTULO III
3. RESOLUCIÓN DE LA ECUACIÓN DE DIFUSIÓN-REACCIÓN.
3.1 Método de Galerkin y formulaciones
Para el desarrollo y resolución de la ecuación de
difusión-reacción se plantea el
siguiente procedimiento:
i. Planteamiento de la ecuación
ii. Discretizar la variable temporal 𝑡 a través del método de
Euler
implícito.
iii. Solución Analítica: Método de Variación de parámetros
iv. Método de Galerkin y formulaciones:
Discretización de la variable espacial 𝑥 realizando la
formulación
variacional o débil, formulación por el método de Galerkin y
formulación matricial
v. Procedimiento de construcción de las funciones base por el
método
de elementos finitos (MEF)
vi. Propiedades de la matriz de rigidez
vii. Ensamblaje de las matrices de rigidez
viii. Resolución de la ecuación de difusión-reacción
Planteamiento de la ecuación problema
Hallar 𝑢 = 𝑢(𝑥, 𝑡) tal que (1)
{
𝑑𝑢
𝑑𝑡− 𝐷
𝑑2𝑢
𝑑𝑥2+ 𝑅𝑢 = 𝑓 (𝑥, 𝑡) 𝑠𝑜𝑏𝑟𝑒 [0, 𝐿 ] × [0, 𝑇 ]
𝐶𝐼: 𝑢(𝑥, 0) = 𝑢0(𝑥) = 0
𝐶𝐹: 𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 𝐿]
(1)
Donde 𝑢 = 𝑢(𝑥, 𝑡), es la concentración de la especie estudiada
en el fluido;
𝐷, 𝑅 son funciones constantes, 𝑓(𝑥, 𝑡) es la función fuente de
generación del
fluido.
-
xxxiv
3.2 Discretización de la variable temporal 𝒕, por el método de
Euler
implícito
Sean 𝑢(𝑥, 𝑡𝑘) = 𝑢𝑘 y 𝑢(𝑥, 𝑡𝑘+1 ) = 𝑢𝑘+1
El método de Euler implícito viene dado por la expresión:
𝑦𝑛+1 = 𝑦𝑛 + ℎ. 𝑓(𝑥𝑛+1, 𝑦𝑛+1) 𝑐𝑜𝑛 ℎ = 𝑥𝑛+1 − 𝑥𝑛
𝑓(𝑥𝑛+1, 𝑦𝑛+1) =𝑦𝑛+1 − 𝑦𝑛
ℎ
Adaptando el término de la derivada temporal de la ecuación de
difusión-
reacción al método de Euler implícito se tiene:
𝑑𝑢𝑘𝑑𝑡
=𝑢𝑘+1 − 𝑢𝑘𝑡𝑘+1 − 𝑡𝑘
;
𝑑𝑢𝑘𝑑𝑡
=𝑢𝑘+1 − 𝑢𝑘
ℎ𝑡;
Donde ℎ𝑡 = 𝑡𝑘+1 − 𝑡𝑘
Por lo tanto el método implícito de Euler consiste en reemplazar
la derivada
temporal de 𝑢 por medio de la pendiente
Reemplazando en la Ec.1
𝑢𝑘+1 − 𝑢𝑘ℎ𝑡
− 𝐷𝑑2 𝑢𝑘+1𝑑𝑥2
+ 𝑅 𝑢𝑘+1 = 𝑓𝑘+1(𝑥, 𝑡𝑘)
Sea 𝑓𝑘+1 = 𝑓𝑘+1(𝑥, 𝑡𝑘)
−ℎ𝑡𝐷 𝑑2 𝑢𝑘+1𝑑𝑥2
+ (𝑅ℎ𝑡 + 1)𝑢𝑘+1 = ℎ𝑡 𝑓𝑘+1 + 𝑢𝑘
Si se hace 𝐶 = 𝑅ℎ𝑡 + 1, 𝐸 = ℎ𝑡𝐷 con 𝐷 = 1, 𝑅 = 1
El problema se transforma en hallar: 𝑢𝑘 = (𝑥, 𝑡𝑘) tal que
(2)
-
xxxv
{−𝐸𝑢𝑘+1
′′ + 𝐶 𝑢𝑘+1 = ℎ𝑡 𝑓𝑘+1 + 𝑢𝑘
𝑢(0, 𝑡) = 𝑢 (1, 𝑡) = 0 ∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 1 ] (2)
Se debe encontrar en general 𝑢(𝑥, 𝑡), 0 ≤ 𝑥 ≤ 1, t ≥ 0 a partir
de los datos:
𝑢 = (0, 𝑡) = 0, 𝑢 = (1, 𝑡) = 0 , ∀ 𝑡 ∈ [0, 𝑇], ∀ 𝑥 ∈ [0,1].
{
−𝐸𝑢′′ + 𝐶 𝑢 = 𝑓
𝑢(0, 𝑡) = 0 𝑢 (1, 𝑡) = 0
∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 1 ]
Donde 𝑢 = 𝑢𝑘+1, 𝑢′′ = 𝑢𝑘+1
′′ , 𝑓 = ℎ𝑡𝑓𝑘+1 + 𝑢𝑘, 𝑘 contador temporal
3.3 Solución Analítica de la ecuación de difusión-reacción
semidiscretizada: Método de Variación de parámetros.
Sea la ecuación −𝐸𝑢′′(𝑥) + 𝐶 𝑢(𝑥) = 𝑓(𝑥) se expresa de la
siguiente manera:
𝐸𝑢′′(𝑥) − 𝐶𝑢(𝑥) = −𝑓(𝑥)
Suponiendo que 𝑓(𝑥) = 2 y además 𝐸 = 1, 𝐶 = 1 resulta
𝑢′′(𝑥) − 𝑢(𝑥) = −2
𝑢𝐺 = 𝑢𝐻 + 𝑢𝑃
𝑢𝐻 = (−𝐷2 + 1)𝑢 = 0
(𝐷2 − 1)𝑢 = 0
(𝐷 − 1)(𝐷 + 1)𝑢 = 0
𝑢𝐻 = 𝑐1𝑒𝑥 + 𝑐2𝑒
−𝑥
𝑢𝑃 = 𝑣1(𝑥)𝑒𝑥 + 𝑣2(𝑥)𝑒
−𝑥
En esta etapa se aplica el método de variación de parámetros
{𝑣1′(𝑥)𝑒𝑥 + 𝑣2
′(𝑥)𝑒−𝑥 = 0
𝑣1′(𝑥)𝑒𝑥 − 𝑣2
′(𝑥)𝑒−𝑥 = −2
-
xxxvi
Para resolver el sistema anterior se utiliza la regla de
Cramer
𝑣1′ =
| 0 𝑒−𝑥
−2 −𝑒−𝑥|
|𝑒𝑥 𝑒−𝑥
𝑒𝑥 −𝑒−𝑥|=
2𝑒−𝑥
−𝑒𝑥. 𝑒−𝑥 − 𝑒𝑥. 𝑒−𝑥=2𝑒−𝑥
−2= −𝑒−𝑥
𝑣1(𝑥) = ∫𝑒−𝑥𝑑𝑥 = 𝑒−𝑥
𝑣2′ =
|𝑒𝑥 0𝑒𝑥 −2
|
−2=−2𝑒𝑥
−2= 𝑒𝑥
𝑣2(𝑥) = ∫𝑒𝑥 = 𝑒𝑥
𝑢𝑃 = 𝑒−𝑥. 𝑒𝑥 + 𝑒𝑥𝑒−𝑥 = 2
𝑢𝐺 = 𝑐1𝑒𝑥 + 𝑐2𝑒
−𝑥 + 2
Para determinar las constantes, se utilizan las condiciones de
frontera
𝑢(0) = 𝑐1 + 𝑐2 + 2 = 0
𝑢(1) = 𝑐1𝑒 + 𝑐2𝑒−1 + 2 = 0
{𝑐1 + 𝑐2 = −2
𝑐1𝑒 + 𝑐2𝑒−1 = −2
Al resolver se obtiene los siguientes resultados
𝑐1 = −2
1 + 𝑒
𝑐2 = −2𝑒
1 + 𝑒
𝑢𝐺 = −2
1 + 𝑒(𝑒𝑥 + 𝑒1−𝑥) + 2 𝑆𝑜𝑙𝑢𝑐𝑖ó𝑛 𝑔𝑒𝑛𝑒𝑟𝑎𝑙 𝑒𝑥𝑎𝑐𝑡𝑎
-
xxxvii
3.4 Discretización de la variable espacial 𝒙
Para la formulación variacional y de Galerkin es necesario
conocer:
- Método de integración por partes
- Espacios vectoriales (Hilbert)
- Base de un espacio vectorial, independencia lineal
- Sumatorias y propiedades de linealidad
- Funcional bilineal detallados en los Anexos1, 2, 3
3.4.1 Formulación variacional o débil
El problema es hallar 𝑢 = 𝑢𝑘 = (𝑥, 𝑡𝑘) con 𝑥 𝜖 [0,1] tal que
(3).
{
−𝐸𝑢′′ + 𝐶 𝑢 = 𝑓
𝑢(0, 𝑡) = 0 𝑢 (1, 𝑡) = 0
∀ 𝑡 ∈ [0, 𝑇 ] , ∀𝑥 ∈ [0, 1 ] (3)
Sea 𝑉 es un espacio vectorial de funciones de dimensión infinita
y sea 𝑣 ∈ 𝑉
la función de prueba fija que es cualquier función de 𝑥, tal
que:
𝑉 = {𝑣 ∶ [0,1] → ℝ | 𝑣(0) = 𝑣(1) = 0}
Se multiplica por 𝑣 ∈ 𝑉 a los dos miembros de la ecuación (3) y
se integra.
∫ −𝐸𝑢′′𝑣 𝑑𝑥 + ∫ 𝐶𝑢𝑣 𝑑𝑥1
0
1
0
= ∫ 𝑓𝑣 𝑑𝑥, ∀ 𝑣 ∈ 𝑉1
0
Se aplica la integración por partes en el intervalo [0,1], al
término que contiene
la segunda derivada, esto es ∫ 𝑢′′𝑣 𝑑𝑥1
0, con el propósito de reducir el grado de
la ecuación deferencial, recordando que la fórmula de
integración por partes es:
∫𝑢𝑑𝑣 = 𝑢𝑣 − ∫𝑣𝑑𝑢 + 𝐶
Sea 𝑝 = 𝑣 → 𝑝′ = 𝑣′ ; 𝑞′ = 𝑢′′ → 𝑞 = 𝑢′
∫ 𝑢′′𝑣 𝑑𝑥1
0= 𝑢′(1) 𝑣(1) − 𝑢′(0) 𝑣(0) − ∫ 𝑢′𝑣′ 𝑑𝑥
1
0
Como 𝑣(0) = 𝑣(1) = 0 lo que se reduce a:
-
xxxviii
∫ 𝑢′′𝑣 𝑑𝑥1
0
= −∫ 𝑢′𝑣′ 𝑑𝑥1
0
,
Sustituyendo en (3), se obtiene:
∫ (𝐸𝑢′𝑣′ + 𝐶𝑢𝑣) 𝑑𝑥1
0
= ∫ 𝑓𝑣 𝑑𝑥, ∀ 𝑣 ∈ 𝑉1
0
La formulación variacional o débil del problema, visto en (3)
es:
Hallar 𝑢 = 𝑢𝑘 ∈ 𝑉 (𝑉 = 𝐻0′) tal que:
∫ (𝐸𝑢′𝑣′ + 𝐶𝑢𝑣) 𝑑𝑥1
0
= ∫ 𝑓 𝑣 𝑑𝑥 ∀ 𝑣 ∈1
0
𝑉 (4)
Si se denota por
𝑎(𝑢, 𝑣) = ∫ (𝐸𝑢′𝑣′ + 𝐶𝑢𝑣) 𝑑𝑥1
0
𝑙(𝑣) = ∫ 𝑓 𝑣 𝑑𝑥 ∀ 𝑣 ∈1
0
𝑉
Así se puede expresar en forma bilineal:
𝑎(𝑢, 𝑣) = 𝑙(𝑣), ∀ 𝑣 ∈ 𝑉
Se dice que 𝑢 ∈ 𝑉 es una solución débil o variacional porque se
comprueban
las condiciones de frontera 𝑢(0) = 𝑢(1) = 0, donde 𝑉 es el
espacio de la clase
de funciones 𝑣 a trozos que tienen derivada de orden uno, además
satisfacen
las condiciones 𝑣(0) = 𝑣(1) = 0.
Si la ecuación (4) se desea resolver tal como está dada “se topa
con una
dificultad, porque la formulación débil está hecha en un espacio
vectorial de
funciones de dimensión infinita como son los espacios de Hilbert
tales como
H0′ (0,1) y por esta razón se hace difícil la implementación
numérica en un
programa computacional” ([22], p. 184), se necesita hacer una
aproximación de
la solución 𝑢, con otros métodos y para este caso en concreto se
ha estimado
-
xxxix
necesario aplicar el método de Galerkin, que consiste en coger
un sub-
espacio 𝑉ℎ de 𝑉 de funciones de dimensión finita 𝑛 y en est