Embed Size (px)
Citation preview

Prırucka k rozhranı PolyScopeVerze 1.7

All Rights Reserved 2 PolyScope

Obsah
1 Uvod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.1 Uvodnı obrazovka . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Obrazovka Inicializace . . . . . . . . . . . . . . . . . . . . . . . 6
2 Editory na obrazovce . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.1 Cıselna klavesnice na obrazovce . . . . . . . . . . . . . . . . . 72.2 Klavesnice na obrazovce . . . . . . . . . . . . . . . . . . . . . . 72.3 Editor vyrazu na obrazovce . . . . . . . . . . . . . . . . . . . . . 8
3 Ovladanı robota . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.1 Karta Pohyb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83.2 Karta V/V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3 V/V Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.4 Karta Automaticky pohyb . . . . . . . . . . . . . . . . . . . . . 123.5 Instalace→ Nacıst / ulozit . . . . . . . . . . . . . . . . . . . . . . 133.6 Instalace→ Poloha TCP . . . . . . . . . . . . . . . . . . . . . . . 133.7 Instalace→ Montaz . . . . . . . . . . . . . . . . . . . . . . . . . 143.8 Instalace→ Nastavenı V/V . . . . . . . . . . . . . . . . . . . . . 153.9 Instalace→ Vychozı program . . . . . . . . . . . . . . . . . . . 163.10 Nastavenı V/V Modbus . . . . . . . . . . . . . . . . . . . . . . . 163.11 Prvky . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.12 Karta Protokol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.13 Obrazovka nactenı . . . . . . . . . . . . . . . . . . . . . . . . . 233.14 Karta Spustit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4 Programovanı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1 Program→ Novy program . . . . . . . . . . . . . . . . . . . . . 264.2 Karta Program . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3 Program→ karta Prıkaz, <Prazdny> . . . . . . . . . . . . . . . 274.4 Program→ karta Prıkaz, Pohyb . . . . . . . . . . . . . . . . . . . 284.5 Program→ karta Prıkaz, Pevny bod trasy . . . . . . . . . . . . 304.6 Nastavenı bodu trasy . . . . . . . . . . . . . . . . . . . . . . . . 304.7 Program→ karta Prıkaz, Relativnı bod trasy . . . . . . . . . . . 314.8 Program→ karta Prıkaz, Promenny bod trasy . . . . . . . . . . 324.9 Program→ karta Prıkaz, Cekat . . . . . . . . . . . . . . . . . . . 334.10 Program→ karta Prıkaz, Akce . . . . . . . . . . . . . . . . . . . 334.11 Program→ karta Prıkaz, Samostatne okno . . . . . . . . . . . 344.12 Program→ karta Prıkaz, Zastavit . . . . . . . . . . . . . . . . . . 344.13 Program→ karta Prıkaz, Komentar . . . . . . . . . . . . . . . . 354.14 Program→ karta Prıkaz, Slozka . . . . . . . . . . . . . . . . . . . 354.15 Program→ karta Prıkaz, Cyklus . . . . . . . . . . . . . . . . . . 364.16 Program→ karta Prıkaz, Podprogram . . . . . . . . . . . . . . . 364.17 Program→ karta Prıkaz, Zadanı . . . . . . . . . . . . . . . . . . 374.18 Program→ karta Prıkaz, If . . . . . . . . . . . . . . . . . . . . . . 384.19 Program→ karta Prıkaz, Skript . . . . . . . . . . . . . . . . . . . 394.20 Program→ karta Prıkaz, Udalost . . . . . . . . . . . . . . . . . . 39
3

Obsah
4.21 Program→ karta Prıkaz, Vlakno . . . . . . . . . . . . . . . . . . 404.22 Program→ karta Prıkaz, Tvar . . . . . . . . . . . . . . . . . . . . 404.23 Program→ karta Prıkaz, Sıla . . . . . . . . . . . . . . . . . . . . 424.24 Program→ karta Prıkaz, Paleta . . . . . . . . . . . . . . . . . . 444.25 Program→ karta Prıkaz, Hledat . . . . . . . . . . . . . . . . . . 454.26 Program→ karta Prıkaz, Potlacit . . . . . . . . . . . . . . . . . . 484.27 Program→ karta Grafika . . . . . . . . . . . . . . . . . . . . . . 494.28 Program→ karta Struktura . . . . . . . . . . . . . . . . . . . . . 504.29 Program→ karta Promenne . . . . . . . . . . . . . . . . . . . . 514.30 Program→ karta Prıkaz, Inicializace promennych . . . . . . . 51
5 Nastavenı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 525.1 Obrazovka Nastavenı . . . . . . . . . . . . . . . . . . . . . . . . 525.2 Obrazovka Nastavenı→ Inicializovat . . . . . . . . . . . . . . . 535.3 Obrazovka Nastavenı→ Volba jazyka . . . . . . . . . . . . . . 535.4 Obrazovka Nastavenı→ Aktualizace . . . . . . . . . . . . . . . 545.5 Obrazovka Nastavenı→ Heslo . . . . . . . . . . . . . . . . . . . 545.6 Obrazovka Nastavenı→ Kalibrovat dotykovou obrazovkou . 555.7 Obrazovka Nastavenı→ Sıt’ . . . . . . . . . . . . . . . . . . . . . 555.8 Obrazovka Nastavenı→ Cas . . . . . . . . . . . . . . . . . . . . 56
All Rights Reserved 4 PolyScope

1. Uvod
1 Uvod
PolyScope je graficke uzivatelske rozhranı (GUI), ktere slouzı k ovladanı robota,spoustenı existujıcıch programu robota a snadnemu vytvarenı novych programu.Rozhranı PolyScope ma podobu dotykove obrazovky pripojene k ovladacı jed-notce. Informace o kalibraci dotykove obrazovky naleznete v casti 5.6.
Na predchozım obrazku je znazornena uvodnı obrazovka. Modre plochy ob-razovky predstavujı tlacıtka, ktera lze stisknout dotykem prstu nebo zadnı stranypera na obrazovku. Obrazovky rozhranı PolyScope jsou usporadany hierarchicky.V programovacım prostredı jsou obrazovky usporadany na kartach, ktere umoznujısnadny prıstup.
V tomto prıkladu je na nejvyssı urovni vybrana karta Program a pod nı kartaStruktura. Karta Program obsahuje informace tykajıcı se aktualne nactenehoprogramu. Kdyz vyberete kartu Pohyb, zobrazı se obrazovka
”Pohyb“, na ktere
lze ovladat pohyb robota. Po vybranı karty V/Vmuzete sledovat a menit aktualnıstav elektrickych vstupu a vystupu.
K ovladacı jednotce lze pripojit mys a klavesnici nebo prenosny ovladacı ter-minal, nenı to vsak nezbytne. Temer vsechna textova pole lze ovladat dotykem;dotyk techto polı vyvola cıselnou klavesnici ci klavesnici na obrazovce. Textovapole neovladatelna dotykem majı vedle sebe ikonu editoru, ktera spustı prıslusnyeditor vstupu.
Ikony cıselne klavesnice ci klavesnice na obrazovce a editoru vyrazu jsou zob-razeny vyse.
Obrazovky rozhranı PolyScope jsou popsany v nasledujıcıch castech.
All Rights Reserved 5 PolyScope

1. Uvod
1.1 Uvodnı obrazovka
Po spustenı ovladajıcıho pocıtace se zobrazı uvodnı obrazovka. Na obra-zovce jsou k dispozici nasledujıcı moznosti:
• SPUSTIT program: Vyberte program, ktery chcete spustit. Jedna se o nej-jednodussı zpusob ovladanı robota; tento zpusob vsak vyzaduje, aby byl jizvytvoren vhodny program.
• NAPROGRAMOVAT robota: Muzete zmenit program nebo vytvorit novy.
• NASTAVENI robota: Nastavenı hesel, upgrade softwaru prostrednictvım In-ternetu, zadost o podporu, kalibrace dotykove obrazovky atd.
• VYPNOUT robota: Vypne ovladajıcı pocıtac a vypne napajenı robota.
All Rights Reserved 6 PolyScope

1. Uvod
1.2 Obrazovka Inicializace
Na teto obrazovce lze ovladat inicializaci robota. Po zapnutı musı robot vy-hledat polohy pro jednotlive klouby. K dosazenı techto poloh je nutne, aby robotklouby pohyboval.
Stavove indikatory
Stavove indikatory signalizujı stav cinnosti kloubu.
• Jasne cerveny indikator znamena, ze je robot aktualne zastaven, pricemzduvody mohou byt ruzne.
• Jasne zluty indikator znamena, ze kloub funguje, avsak nezna svoji aktualnıpolohu a vyzaduje prechod do vychozı polohy.
• Zeleny indikator znamena, ze kloub pracuje spravne a je pripraven k cinnosti.
Vsechny indikatory musı byt zelene, aby mohl robot normalne pracovat.
Rucnı pohyb (ovladanı rukou)
Kdyz jsou klouby ve stavu Pripraveno a stisknete tlacıtko”volneho ovladanı“
na zadnı strane obrazovky, rezim kloubu prepne na Zpetne rızenı. V tomtorezimu se po zjistenı pohybu uvolnı brzdy kloubu. V tomto stavu lze robota vy-jmout ze stroje pred spustenım rucne. Brzdy se opet aktivujı po dalsım stisknutıtlacıtka.
Automaticky pohyb (tlacıtka Auto)
Za normalnıch okolnostı vzdy doporucujeme pouzıvat tlacıtka Auto k prestavenıjednotlivych kloubu do znameho stavu. Chcete-li tlacıtko Auto pouzıt, stiskneteje a drzte je stisknute.
Automaticka tlacıtka lze pouzıt jednotlive pro kazdy kloub nebo pro celehorobota. Dbejte zvysene opatrnosti, pokud se robot dotyka prekazky ci stolu, je-likoz naraz robota do prekazky muze poskodit prevod kloubu.
All Rights Reserved 7 PolyScope

2. Editory na obrazovce
Prıme ovladanı pohybu (tlacıtka Pohyb)
V prıpade, ze je kloub v poloze, kdy hrozı zvysene riziko poskozenı robota cijeho okolı v dusledku neovladaneho pohybu, muze obsluha zvolit rucnı ovladanıpohybu jednotlivych kloubu robota. Cast 1.2.
2 Editory na obrazovce
2.1 Cıselna klavesnice na obrazovce
Slouzı k jednoduchemu zadavanı a upravam cıselnych hodnot. V mnohaprıpadech je jednotka zadane hodnoty uvedena vedle cıselne hodnoty.
2.2 Klavesnice na obrazovce
All Rights Reserved 8 PolyScope

3. Ovladanı robota
Slouzı k jednoduchemu psanı a upravam textu. Pomocı klavesy Shift lzezadat dalsı specialnı znaky.
2.3 Editor vyrazu na obrazovce
Vlastnı vyraz se upravuje jako text, editor vyrazu je vsak vybaven radou tlacıtek,ktere slouzı k vlozenı specialnıch symbolu, naprıklad ∗ pro nasobenı a ≤ promensı nebo rovnou hodnotu. Tlacıtko se symbolem klavesnice v pravem hornımrohu obrazovky slouzı k prepnutı na upravy textu vyrazu. Vsechny definovanepromenne jsou k dispozici nastroji pro vyber Promenne, nazvy vstupnıch a vystupnıchportu jsou k dispozici v nastroji pro vyber Vstup a Vystup. Nektere specialnıfunkce jsou k dispozici v nabıdce Funkce.
Po stisknutı tlacıtka OK je vyraz zkontrolovan, zda neobsahuje gramatickechyby. Stisknutım tlacıtka Storno zavrete obrazovku a zrusıte vsechny zmeny.
Vyraz muze mıt nasledujıcı podobu:
digital_in[1]=True and analog_in[0]<0.5
3 Ovladanı robota
3.1 Karta Pohyb
Na teto obrazovce muzete vzdy pohnout (manipulovat) robotem prımo, a tobud’ premıstenım/otocenım nastroje robota, nebo ovladanım kloubu robotajednotlive.
All Rights Reserved 9 PolyScope

3. Ovladanı robota
Robot
3D grafika znazornuje aktualnı polohu robota. Stisknutım ikony lupy zobrazenızvetsıte ci zmensıte, pretazenım prstu pohled zmenıte. Pri rızenı robota doporucujemevybrat funkci
”Zobrazenı“ a otocit uhel zobrazenı 3D nakresu tak, aby odpovıdal
vasemu pohledu na robota.
Poloha prvku a nastroje
V prave hornı casti obrazovky se nachazı nastroj pro vyber prvku. Nastroj provyber prvku slouzı k urcenı prvku, vzhledem k nemuz bude robot ovladan. Vpolıch pod nım se zobrazujı uplne hodnoty souradnic nastroje vzhledem ke zvo-lenemu prvku.
Hodnoty lze upravit rucne kliknutım na souradnici nebo polohu kloubu.
Pohyb nastroje
• Pridrzenım sipky premıstenı (nahore) presunete hrot nastroje robota vuvedenem smeru.
• Pridrzenım sipky otocenı (tlacıtko) zmenıte orientaci nastroje robota vuvedenem smeru. Bodem rotace je bod TCP, ktery ma podobu male modrekulicky.
Poznamka: Uvolnenım tlacıtka muzete pohyb kdykoli prerusit.
Pohyb kloubu
Jednotlive klouby lze ovladat prımo. Kazdy kloub ma rozsah pohybu od −360◦do +360◦, coz jsou meze kloubu znazornene vodorovnymi sloupci u jednotlivychkloubu. Pokud kloub dosahne meznı polohy, nelze jım pohybovat dale smeremod 0◦.
All Rights Reserved 10 PolyScope

3. Ovladanı robota
Ucit
Pri stisknutı tlacıtka”Ucit“ je mozne robota fyzicky uchopit a premıstit do pozadovane
polohy. Pokud nenı nastavenı gravitacnı sıly (viz 3.7) na karte Nastavenı spravnenebo pokud robot prenası tezky naklad, muze se robot po stisknutı tlacıtka
”Ucit“
zacıt pohybovat (padat). V takovem prıpade tlacıtko”Ucit“ opet uvolnete.
3.2 Karta V/V
Na teto obrazovce muzete neustale sledovat a nastavovat aktualnı V/V signalyz robota a do nej. Na obrazovce se zobrazuje aktualnı stav V/V vcetne stavu vprubehu spustenı programu. Pokud behem provadenı programu dojde k nejakezmene, program se zastavı. Pri zastavenı programu si vsechny vystupnı signalyzachovajı aktualnı stav. Frekvence aktualizace obrazovky je pouze 10 Hz, takzevelmi rychly signal se nemusı spravne zobrazit.
Elektricke detaily signalu jsou popsany v uzivatelske prırucce.
Nastavenı analogovych rozsahu Analogovy vystup lze nastavit bud’ jako prou-dovy [4–20 mA], nebo jako napet’ovy [0–10 V]. Rozsah analogoveho vstupu lzenastavit od [-10–10 V] do [0–5 V]. Po ulozenı programu budou nastavenı pouzitapri prıpadnem pozdejsım restartovanı ovladace robota.
3.3 V/V Modbus
Zde se zobrazujı digitalnı signaly V/V Modbus podle nastavenı v instalaci. Po-kud dojde k prerusenı pripojenı signalu, bude prıslusna polozka na obrazovceneaktivnı.
All Rights Reserved 11 PolyScope

3. Ovladanı robota
Vstupy
Zde se zobrazuje stav digitalnıch vstupu protokolu Modbus.
Vystupy
Zde muzete zobrazit a prepınat stav digitalnıch vystupu protokolu Modbus. Signallze prepınat pouze v prıpade, ze to volba ovladanı karty V/V (popsana v casti3.8) umoznuje.
All Rights Reserved 12 PolyScope

3. Ovladanı robota
3.4 Karta Automaticky pohyb
Karta Automaticky pohyb slouzı pro pohyb robota do konkretnı polohy v pra-covnım prostoru. Jako prıklad lze uvest presun robota do pocatecnı polohy pro-gramu pred spustenım programu nebo prechod do bodu trasy behem upravyprogramu.
Animace
Animace znazornuje pohyb, ktery se robot chysta provest. Animaci muzete srov-nat s polohou skutecneho robota a ujistit se, ze robot muze pohyb bezpecneprovest bez kolize s prekazkami.
Auto
Pridrzenım tlacıtka Auto presunete robota podle znazornenı v animaci. Poznamka:Uvolnenım tlacıtka muzete pohyb kdykoli prerusit.
Rucne
Stisknutım tlacıtka Rucnı prejdete na kartu Pohyb a budete moci pohybovatrobotem rucne. Tato moznost se pouzıva tehdy, pokud nenı pohyb podle ani-mace zadoucı.
All Rights Reserved 13 PolyScope

3. Ovladanı robota
3.5 Instalace→ Nacıst / ulozit
Instalace zahrnuje zpusob umıstenı robota v pracovnım prostredı, a to jaks ohledem na mechanickou montaz robota, tak na elektricka pripojenı k jinymzarızenım. Tato nastavenı lze provest pomocı ruznych obrazovek na karte Instalace.Pro robota lze pouzıt vıce instalacnıch souboru. Vytvorene programy budoupouzıvat aktivnı instalaci a tato instalace bude pri pouzitı automaticky nactena.Veskere zmeny provedene v instalaci je nutno ulozit, aby byly po vypnutı napajenızachovany. Instalaci lze ulozit bud’ stisknutım tlacıtka Ulozit nebo ulozenım pro-gramu pomocı instalace.
3.6 Instalace→ Poloha TCP
Stredovy bod nastroje (TCP) je bod na konci ramena robota, ktery predstavujecharakteristicky bod nastroje robota. Kdyz se robot pohybuje linearne, bude se
All Rights Reserved 14 PolyScope

3. Ovladanı robota
tento bod pohybovat po prımce. Pohyb TCP bude znazornen na karte grafiky.Bod TCP je dan vzhledem ke stredu vnejsı prıruby nastroje, jak je znazorneno nagrafice na obrazovce.
Pri zmene bodu TCP jsou dulezita dve tlacıtka ve spodnı casti obrazovky.
• Tlacıtko Zmenit pohyby prepocıta vsechny polohy v programu robota tak,aby odpovıdaly novemu TCP. Je to dulezite tehdy, kdyz se zmenı tvar civelikost nastroje.
• Tlacıtko Zmenit grafiku prekreslı grafiku programu tak, aby odpovıdala novemuTCP. Pouzıva se v prıpade, ze dojde ke zmene TCP, aniz by doslo k fyzickezmene u nastroje.
3.7 Instalace→ Montaz
Zde lze zadat udaje o umıstenı robota. Toto nastavenı slouzı ke dvema ucelum:
1. Robot bude spravne zobrazen na obrazovce.
2. Ovladac bude mıt spravnou informaci o smeru gravitacnı sıly.
Ovladac pouzıva pokrocily dynamicky model k zajistenı plynulych a presnychpohybu robota a k zajistenı stability robota pri zpetnem rızenı. Z tohoto duvoduje dulezite nastavit umıstenı robota spravne.
Vychozı nastavenı predstavuje umıstenı robota na plochem stole nebo pod-laze. V takovem prıpade nenı nutne provadet na teto obrazovce zadnou zmenu.Pokud je vsak robot upevnen ke stropu, upevnen ke stene nebo namontovanpod urcitym uhlem, lze nastavenı upravit pomocı tlacıtek. Tlacıtka na pravestrane obrazovky slouzı k nastavenı uhlu montaze robota. Tri tlacıtka vpravonahore slouzı k nastavenı uhlu pro strop (180◦), stenu (90◦) a podlahu (0◦). TlacıtkaNaklon lze pouzıt k nastavenı libovolneho uhlu. Tlacıtka ve spodnı casti obra-zovky slouzı k natocenı umıstenı robota tak, aby odpovıdalo skutecne montazirobota.
All Rights Reserved 15 PolyScope

3. Ovladanı robota
3.8 Instalace→ Nastavenı V/V
Vstupnı a vystupnı signaly lze oznacit nazvy. Tımto zpusobem si snaze zapa-matujete ucel signalu pri praci s robotem. Kliknutım vyberte V/V a nastavtenazev pomocı klavesnice na obrazovce. Chcete-li obnovit vychozı nazev, za-dejte pouze prazdne znaky.
Po zvolenı vystupu dojde k aktivaci nekolika moznostı. Pomocı zaskrtavacıhopolıcka lze nastavit vychozı hodnotu vystupu jako nızkou nebo vysokou. To zna-mena, ze vystup bude nastaven na tuto hodnotu, kdyz nenı program spusten.Pokud nenı polıcko zaskrtnuto, zustane aktualnı stav vystupu po skoncenı pro-gramu nezmenen. Lze rovnez nastavit, zda bude vystup ovladan prostrednictvımkarty V/V (bud’ programatory, nebo programatory i obsluhou) nebo zda hod-notu vystupu budou moci menit pouze programy robota.
All Rights Reserved 16 PolyScope

3. Ovladanı robota
3.9 Instalace→ Vychozı program
Vychozı program bude nacten po zapnutı ovladacı jednotky.
3.10 Nastavenı V/V Modbus
Zde lze nastavit V/V signaly protokolu Modbus. Jednotky Modbus u konkretnıchIP adres lze pridat ci odebrat a stejne tak lze pridat ci odebrat vstupnı a vystupnısignaly (registry ci digitalnı) techto jednotek. Kazdy signal musı byt oznacen je-dinecnym nazvem. Na jeden signal Modbus muze odkazovat nekolik signalus ruznymi nazvy, avsak toto resenı nenı doporucovano. Tlacıtka a pole jsou popsananıze.
All Rights Reserved 17 PolyScope

3. Ovladanı robota
Obnovit
Stisknutım tohoto tlacıtka obnovıte stav pripojenı vsech signalu Modbus ve stavajıcıinstalaci.
Pridat jednotku
Stisknutım tohoto tlacıtka pridate do instalace robota novou jednotku Modbus.
Odstranit jednotku
Stisknutım tohoto tlacıtka odstranıte jednotku Modbus a spolecne s nı vsechnypridane signaly.
Nastavit IP jednotky
Zde je uvedena IP adresa jednotky Modbus. Chcete-li ji zmenit, stisknete tlacıtko.
Pridat signal
Stisknutım tohoto tlacıtka pridate do instalace robota signal, ktery bude k dispo-zici na prıslusne jednotce Modbus.
Odstranit signal
Stisknutım tohoto tlacıtka odstranıte z instalace signal Modbus.
Nastavit typ signalu
Vyberte typ signalu z rozevıracı nabıdky. K dispozici jsou nasledujıcı typy:
• Digitalnı vstup: Digitalnı vstup je jednobitova informace prectena z jed-notky Modbus na vystupu urcenem v poli adresy signalu. Pouzıva se kodfunkce 0x02 (ctenı diskretnıch vstupu).
• Digitalnı vystup: Digitalnı vystup je jednobitova informace, kterou lze nasta-vit bud’ jako vysokou, nebo jako nızkou, v zavislosti na konfiguraci prıslusnehoterminalu Modbus. Dokud uzivatel nenastavı hodnotu tohoto vystupu, budehodnota ctena z jednotky. To znamena, ze bude pouzıvan kod funkce0x01 (ctenı vystupu), dokud nebude vystup nastaven. Jakmile bude vystupnastaven programem robota nebo stisknutım tlacıtka
”Nastavit hodnotu
signalu“, bude pouzıvan kod funkce 0x05 (zapis jednoho vystupu).
• Vstup registru: Vstup registru je 16bitova informace prectena z adresy za-dane v poli adresy. Pouzıva se kod funkce 0x04 (ctenı vstupnıch registru).
• Vystup registru: Vystup registru je 16bitova informace nastavitelna uzivatelem.Pokud nenı hodnota registru nastavena, bude jejı hodnota nactena. Toznamena, ze bude pouzit kod funkce 0x03 (ctenı uzivatelskych registru),dokud nebude signal nastaven bud’ programem robota, nebo zadanımhodnoty signalu v poli
”Nastavit hodnotu signalu“, pote bude pouzıvan
kod funkce 0x06 (zapis jednoho registru).
All Rights Reserved 18 PolyScope

3. Ovladanı robota
Nastavit adresu signalu
V tomto poli je uvedena adresa signalu. Pomocı cıselne klavesnice na obra-zovce muzete zadat jinou adresu. Platne nastavenı adresy zavisı na vyrobci akonfiguraci jednotky Modbus. Je nezbytne mıt dobry prehled o vnitrnım usporadanıpameti ovladace Modbus, abyste zajistili, ze adresa signalu skutecne odpovıdazamyslenemu ucelu signalu. Doporucujeme overit vyznam adresy signalu pripouzitı jinych kodu funkcı. V casti 3.10 naleznete popis kodu funkcı souvisejıcıchs ruznymi typy signalu.
Nastavit nazev signalu
Pomocı klavesnice na obrazovce lze zadat smysluplny nazev signalu, a umoznittak intuitivnejsı programovanı robota pomocı signalu. Nazvy signalu jsou jedinecne,nelze tedy priradit dvema ruznym signalum stejny nazev. Nazvy signalu mohouobsahovat maximalne 10 znaku.
Hodnota signalu
Zde je uvedena aktualnı hodnota signalu. V prıpade signalu registru je hod-nota vyjadrena jako kladne cele cıslo. V prıpade vystupnıch signalu lze nastavitpozadovanou hodnotu signalu pomocı tlacıtka. Pro vystupy registru opet platı,ze zapsana hodnota musı byt cele kladne cıslo.
Stav pripojenı signalu
Tato ikona znazornuje, zda lze signal spravne precıst/zapsat (zelena) nebo zdajednotka reaguje neocekavane ci nenı dostupna (seda).
Zobrazit pokrocile moznosti
Toto zaskrtavacı polıcko slouzı k zobrazenı ci skrytı pokrocilych moznostı u jednot-livych signalu.
Pokrocile moznosti
• Frekvence aktualizace: Tato nabıdka umoznuje zmenit frekvenci aktuali-zace signalu. Jedna se o frekvenci odesılanı pozadavku na ovladac Mod-bus bud’ na ctenı, nebo na zapis hodnoty signalu.
• Adresa podrızene jednotky: Toto textove pole lze pouzıt k nastavenı konkretnıadresy podrızene jednotky pro ucely pozadavku odpovıdajıcıch konkretnımusignalu. Hodnota musı byt v rozsahu 0–255 vcetne, vychozı hodnota je 255.Pokud tuto hodnotu zmenıte, doporucujeme pomocı prırucky k zarızenımModbus overit funkcnost s pouzitım zmenene adresy podrızene jednotky.
3.11 Prvky
Zakaznıci, kterı si porizujı prumyslove roboty, obvykle pozadujı moznost rıdit ro-bota ci manipulovat s robotem a naprogramovat jej vzhledem k ruznym ob-jektum a hranicım v jeho okolı, jako jsou stroje, objekty, prazdne prostory, in-stalace, dopravnıky, palety ci kontrolnı systemy. K tomu se obvykle pouzıva defi-novanı
”ramcu“ (systemu souradnic), ktere urcuje vztah vnitrnıho souradnicoveho
All Rights Reserved 19 PolyScope

3. Ovladanı robota
systemu robota (zakladnıho souradnicoveho systemu) k souradnicovemu systemuprıslusneho objektu. Jako referenci lze pouzıt
”souradnice nastroje“ i
”zakladnı
souradnice“ robota.Problemem techto ramcu je nutnost urcitych matematickych znalostı, ktere
umoznujı definovanı tohoto souradnicoveho systemu, a take casova narocnosttohoto postupu, a to i pro osoby, ktere majı s programovanım a instrukcı robotuzkusenosti. Tento postup casto vyzaduje vypocet matic 4x4. Zejmena vyjadrenıorientace je narocne pro osoby, ktere nemajı s problematikou dostatecne zkusenosti.
Zakaznıci casto pokladajı naprıklad tyto dotazy:
• Je mozne umıstit robota 4 cm od celisti cıslicove rızeneho stroje (CNC)?
• Je mozne natocit nastroj robota ke stolu pod uhlem 45 stupnu?
• Je mozne, aby se robot s objektem pohyboval svisle dolu, pustil objekta pote se opet premıstil vzhuru?
Vyznam techto a podobnych otazek je zcela jasny pro zakaznıka, ktery chcerobota pouzıvat naprıklad na ruznych pracovistıch vyrobnıho zavodu, pricemztakovemu zakaznıkovi muze pripadat nepochopitelne, ze na takove
”dulezite“
otazky nemusı existovat jednoducha odpoved’. Je pro to nekolik slozitych duvodu,a abychom tyto problemy vyresili, vyvinula spolecnost Universal Robots jedinecnea jednoduche zpusoby, kterymi muze zakaznık urcit polohu ruznych objektu vzhle-dem k robotovi. V nekolika krocıch je mozne provest presne to, co pozadujı vyseuvedene dotazy.
Prejmenovat
Toto tlacıtko slouzı k prejmenovanı prvku.
Odstranit
Toto tlacıtko slouzı k odstranenı prvku a jeho prıpadnych dılcıch prvku.
All Rights Reserved 20 PolyScope

3. Ovladanı robota
Zobrazit osy
Zvolte, zda se budou v 3D grafice zobrazovat souradnice vybraneho prvku.Volba bude pouzita na teto obrazovce a na obrazovce Pohyb.
Menitelny prvek
Vyberte, zda bude vybrany prvek menitelny. Urcıte tak, zda se bude prvek zob-razovat v nabıdce prvku na obrazovce Pohyb.
Promenna
Vyberte, zda bude mozne pouzıt vybrany prvek jako promennou. Kdyz je tatomoznost vybrana, bude pri uprave programu robota k dispozici promenna po-jmenovana jako nazev prvku nasledovany symbolem
”var“; teto promenne bu-
dete moci priradit novou hodnotu v programu a pouzıt ji k ovladanı bodu trasyv zavislosti na hodnote prvku.
Nastavit nebo zmenit polohu
Toto tlacıtko slouzı k nastavenı nebo zmene vybraneho prvku. Zobrazı se obra-zovka Pohyb, na ktere bude mozne nastavit novou polohu prvku.
Premıstit robota k prvku
Stisknutım tohoto tlacıtka premıstıte robota smerem k vybranemu prvku. Na koncitohoto pohybu se budou souradnicove systemy prvku a polohy TCP shodovat svyjimkou 180stupnoveho otocenı kolem osy X.
Pridat bod
Stisknutım tohoto tlacıtka pridate do instalace bod. Poloha bodu je definovanajako poloha TCP v tomto bode. Orientace bodu je stejna jako orientace TCPs vyjimkou 180stupnoveho otocenı souradnicoveho systemu prvku kolem osy X.To znamena, ze osa Z souradnicoveho systemu prvku bude otocena opacnevzhledem k ose Z polohy TCP pro dany bod.
All Rights Reserved 21 PolyScope

3. Ovladanı robota
Pridat prımku
Stisknutım tohoto tlacıtka pridate do instalace prımku. Prımka je definovana jakoosa mezi dvema body. Tato osa vedena smerem od prvnıho bodu k druhemubodu bude predstavovat osu Y souradnicoveho systemu prımky. Osa Z bude de-finovana prumetem osy Z prvnıho dılcıho bodu na rovinu kolmou k teto prımce.Poloha souradnicoveho systemu prımky je stejna s polohou prvnıho dılcıho bodu.
Pridat rovinu
Stisknutım tohoto tlacıtka pridate do instalace rovinu. Rovina je definovana tremidılcımi body. Poloha souradnicoveho systemu roviny je stejna s polohou prvnıhodılcıho bodu. Osa Z predstavuje normalu roviny a osa Y vede z prvnıho bodu
All Rights Reserved 22 PolyScope

3. Ovladanı robota
k druhemu bodu. Kladny smer osy Z je nastaven tak, ze uhel mezi osou Z rovinya osou Z prvnıho bodu je mene nez 180◦.
3.12 Karta Protokol
Zdravı robota V hornı polovine obrazovky jsou uvedeny informace o zdravı ro-bota. V leve casti jsou uvedeny informace tykajıcı se ovladacı jednotky robota; vprave casti jsou uvedeny informace o jednotlivych kloubech robota. U kazdehokloubu robota jsou uvedeny informace o teplote elektromotoru a elektroniky,zatızenı kloubu a napetı na kloubu.
All Rights Reserved 23 PolyScope

3. Ovladanı robota
Protokol robota Ve spodnı polovine obrazovky jsou zobrazeny zpravy proto-kolu. Prvnı sloupec obsahuje cas dorucenı zpravy. Nasledujıcı sloupec uvadıodesılatele zpravy. V poslednım sloupci je vlastnı text zpravy.
3.13 Obrazovka nactenı
Na teto obrazovce zvolıte program, ktery chcete nacıst. K dispozici jsou dveverze obrazovky: jedna umoznuje program nacıst a provadet, druha umoznujevybranı a upravu programovych souboru.
Hlavnı rozdıl spocıva v akcıch, ktere jsou uzivateli dostupne. Na zakladnı ob-razovce pro nactenı ma uzivatel pouze prıstup k souborum – nemuze je upravitani odstranit. Uzivatel dale nemuze opustit adresarovou strukturu slozky programu.Uzivatel muze prejıt do podadresare, avsak nejvyssı dostupna uroven je slozkaprogramu.
Proto je nutne, aby vsechny programy byly ulozeny v programove slozce civ podslozkach teto slozky.
Usporadanı obrazovky
Tento obrazek znazornuje obrazovku pro nactenı. Obsahuje nasledujıcı duleziteoblasti a tlacıtka:
Historie tras Historie tras obsahuje seznam tras vedoucıch az do stavajıcıhoumıstenı. To znamena, ze jsou uvedeny vsechny nadrazene adresare az dokorenoveho adresare pocıtace. Zde se muze stat, ze nebudete mıt prıstup kevsem adresarum nad slozkou programu.
Po vybranı nazvu slozky v seznamu se dialogove okno nactenı zmenı naprıslusny adresar a zobrazı jej v oblasti vyberu souboru 3.13.
Oblast vyberu souboru V teto oblasti je zobrazen obsah vlastnıho dialogovehookna. Uzivatel muze soubor vybrat jednım kliknutım nebo jej otevrıt poklikanımna nazev souboru.
All Rights Reserved 24 PolyScope

3. Ovladanı robota
Poklikanım na nazev adresare prejdete na podrızenou slozku a v dialogovemokne se zobrazı jejı obsah.
Filtr souboru Pomocı filtru souboru lze omezit zobrazene soubory tak, aby sezobrazoval pouze pozadovany typ souboru. Vyberete-li moznost
”Zaloznı sou-
bory“, zobrazı se v oblasti vyberu souboru poslednıch 10 ulozenych verzı kazdehoprogramu, pricemz prıpona .old0 predstavuje nejnovejsı a .old9 nejstarsı verzisouboru.
Pole souboru Zde je uveden aktualne zvoleny soubor. Uzivatel muze zadatnazev souboru rucne nebo kliknout na ikonu klavesnice vpravo od pole. Pote sezobrazı klavesnice na obrazovce v samostatnem okne, pomocı nız muze uzivatelzadat nazev prımo na obrazovce.
Tlacıtko Otevrıt Kliknutım na tlacıtko Otevrıt otevrete aktualne zvoleny soubora vratıte se na predchozı obrazovku.
Tlacıtko Storno Kliknutım na tlacıtko Storno prerusıte aktualnı proces nacıtanı aobrazovka prepne na predchozı obrazek.
Tlacıtka Akce Skupina tlacıtek umoznuje uzivateli provadet nektere akce, kterejsou jinak dostupne po kliknutı pravym tlacıtkem na nazev souboru v beznem di-alogovem okne souboru. Tyto funkce jsou rozsıreny o moznost prejıt nahoru vadresarove strukture a prımo na programovou slozku.
• Nadrazena: Slouzı k prechodu nahoru v adresarove strukture. Tlacıtko ne-bude aktivnı ve dvou prıpadech: pokud je aktualnı adresar nejvyssım ad-resarem nebo pokud je obrazovka v omezenem rezimu a aktualnı adresarje programovy adresar.
• Prejıt do programove slozky: Slouzı k prechodu do vychozı slozky.
• Akce: Slouzı k provadenı akcı, naprıklad vytvorenı adresare, odstranenısouboru apod.
All Rights Reserved 25 PolyScope

4. Programovanı
3.14 Karta Spustit
Tato karta poskytuje jednoduchy zpusob ovladanı robota pomocı nejmensıhonutneho mnozstvı tlacıtek a voleb. Tuto moznost lze vyuzıt spolecne s heslemchranenou programovacı castı rozhranı PolyScope (viz cast 5.5) k pouzıvanı ro-bota jako nastroje, ktery provadı vyhradne predem pripravene programy.
4 Programovanı
All Rights Reserved 26 PolyScope

4. Programovanı
4.1 Program→ Novy program
Novy program robota lze vytvorit bud’ z sablony, nebo z existujıcıho (ulozeneho)programu robota. Sablona poskytuje celkovou strukturu programu, je tedy nutnepouze doplnit podrobnosti programu.
4.2 Karta Program
Karta Program uvadı program, ktery aktualne upravujete.Programovy strom na leve strane obrazovky zobrazuje program jako seznam
prıkazu, zatımco oblast na obrazovce vpravo zobrazuje informace tykajıcı seaktualnıho prıkazu. Aktualnı prıkaz vyberete kliknutım na seznam prıkazu nebopomocı tlacıtek Predchozı a Dalsı vpravo dole na obrazovce. Prıkazy lze vlozita odebrat pomocı karty Struktura popsane v casti 4.28. Nazev programu je
All Rights Reserved 27 PolyScope

4. Programovanı
uveden prımo nad seznamem prıkazu s malou ikonou disku. Kliknutım na tutoikonu muzete program rychle ulozit.
Nejnizsı castı obrazovky je Ovladacı panel. Ovladacı panel obsahuje radutlacıtek podobnych staremu magnetofonu, jejichz pomocı lze program spus-tit a zastavit, postupovat po jednotlivych krocıch nebo cely program restarto-vat. Pomocı posuvnıku rychlosti muzete rychlost programu kdykoli upravit. Tımprımo ovlivnıte rychlost, kterou se robot pohybuje. Vlevo od ovladacıho pa-nelu jsou tlacıtka Simulace a Skutecny robot, ktera slouzı k prepınanı mezispustenım programu jako simulace a spustenım skutecneho robota. Pri spustenısimulace se robot nepohybuje, nemuze tedy dojıt ke kolizi a k poskozenı robotaani okolnıho zarızenı. Simulace umoznuje otestovanı programu, pokud si nejstejisti cinnostı robota.
Behem sestavovanı programu jsou vysledne pohyby robota znazornovanypomocı 3D nakresu na karte Grafika, ktera je popsana v casti 4.27.
Vedle kazdeho prıkazu programu se nachazı mala ikona, ktera muze mıtcervenou, zlutou nebo zelenou barvu. Cervena ikona znamena chybu v prıkazu,zluta znamena, ze prıkaz nenı dokoncen, a zelena znamena, ze je vse v poradku.Program lze spustit pouze tehdy, jsou-li vsechny prıkazy zelene.
4.3 Program→ karta Prıkaz, <Prazdny>
Zde je nutne vlozit prıkazy programu. Stisknutım tlacıtka”Struktura“ prejdete
na kartu Struktura, zde muzete vybrat ruzne radky programu. Program nelzespustit, dokud nejsou zadany a definovany vsechny radky.
All Rights Reserved 28 PolyScope

4. Programovanı
4.4 Program→ karta Prıkaz, Pohyb
Prıkaz Pohyb ovlada pohyb robota pres zakladnı body trasy. Body trasy musıbyt uvedeny pod prıkazem Pohyb. Prıkaz Pohyb definuje zrychlenı a rychlost,kterou se robot mezi body trasy pohybuje.
Typy pohybu
Lze vybrat jeden ze trı typu pohybu: Pohyb J, Pohyb L a Pohyb P. Jednotlive typyjsou popsany dale.
• Pohyb J provadı pohyby vypocıtane v prostoru kloubu robota. Vsechnyklouby jsou rızeny tak, aby dosahly pozadovane koncove polohy soucasne.Tento typ pohybu ma za nasledek trasu nastroje ve tvaru krivky. Sdıleneparametry pouzite na tento typ pohybu jsou maximalnı rychlost kloubua zrychlenı kloubu. Jsou pouzity pri vypoctech pohybu udavanych v jed-notkach deg/s a deg/s2. Pokud pozadujete rychlejsı pohyb robota mezibody trasy bez ohledu na trasu nastroje mezi temito body, je tento typpohybu nejvhodnejsı volbou.
• Pohyb L pohybuje nastrojem linearne mezi dvema body trasy. To znamena,ze kazdy z kloubu provede slozitejsı pohyb tak, aby se nastroj pohybovalpo prıme trase. Sdılene parametry, ktere lze nastavit pro tento typ pohybu,jsou pozadovana rychlost nastroje a zrychlenı nastroje v jednotkach mm/sa mm/s2 a take prvek. Zvoleny prvek urcuje, v prostoru ktereho prvku jsoudany polohy nastroje v bodech trasy. Zvlastnı pozornost s ohledem na pro-story prvku je treba venovat promennym prvkum a promennym bodumtrasy. Promenne prvky lze pouzıt, kdyz je nutne urcit polohu nastroje v bodutrasy pomocı skutecne hodnoty promenneho prvku behem spustenı pro-gramu robota.
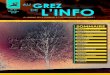
• Pohyb P bude pohybovat nastrojem linearne konstantnı rychlostı s kruhovymikombinacemi. Tento typ je urcen pro nektere specialnı postupy jako lepenıci davkovanı. Velikost uhlu kombinace je ve vychozım nastavenı sdılenapro vsechny body trasy. Nizsı hodnota bude znamenat ostrejsı zatocenı,
All Rights Reserved 29 PolyScope

4. Programovanı
Time
Speed
Acceleration
Cruise
Deceleration
Obrazek 1: Rychlostnı profil pohybu Krivka je rozdelena do trı segmentu:zrychlenı, plynuly pohyb a zpomalenı. Uroven faze plynuleho po-hybu je dana nastavenım rychlosti pohybu, zatımco strmost fazızrychlenı a zpomalenı je dana parametrem zrychlenı.
vyssı hodnota bude znamenat plynulejsı trasu. Protoze se robot pohybujepo trase konstantnı rychlostı, nemuze cekat na operaci V/V ci akci obsluhy.Tyto akce povedou k prerusenı pohybu robota nebo k bezpecnostnımu za-stavenı.
Volba prvku
V prıpade voleb Pohyb L a Pohyb P lze zvolit prostor prvku, v nemz budou bodytrasy prıkazu Pohyb pri zadavanı techto bodu vyjadreny. To znamena, ze prinastavovanı bodu trasy si program zapamatuje souradnice nastroje vzhledemk prostoru zvoleneho prvku. Nekolik aspektu vyzaduje podrobne vysvetlenı.
• Pevny prvek: Pokud vyberete pevny prvek, napr. zakladnu, nebude to mıtzadny vliv na Pevne ani Relativnı body trasy. Chovanı Promennych bodutrasy je popsano dale.
• Promenny prvek: Pokud jsou nektere z prvku v aktualne nactene instalacizvoleny jako promenne, budou odpovıdajıcı promenne rovnez k dispoziciv nabıdce pro volbu prvku. Pokud je zvolena promenna prvku (oznacenanazvem prvku a symbolem
”var“), budou pohyby robota (s vyjimkou rela-
tivnıch bodu trasy) zavisle na skutecne hodnote promenne behem spustenıprogramu. Pocatecnı hodnota promenne prvku je hodnota vlastnıho prvku.To znamena, ze ke zmene pohybu dojde pouze v prıpade, ze je promennaprvku aktivne zmenena programem robota.
• Promenny bod trasy: Kdyz se robot pohybuje do promenneho bodu trasy,bude cılova poloha nastroje vzdy vypocıtana jako souradnice promennev prostoru zvoleneho prvku. Pohyb robota v promennem bode trasy seproto vzdy zmenı, kdyz vyberete jiny prvek.
Nastavenı Sdılene parametry prıkazu Pohyb se vztahujı na trasu z aktualnıpolohy robota do prvnıho bodu trasy podle prıkazu a dale z tohoto bodu dokazdeho nasledujıcıho bodu trasy. Nastavenı prıkazu Pohyb se netykajı trasy odposlednıho bodu trasy podle prıkazu Pohyb.
All Rights Reserved 30 PolyScope

4. Programovanı
4.5 Program→ karta Prıkaz, Pevny bod trasy
Bod na trase robota. Body trasy predstavujı nejzakladnejsı soucast programurobota, protoze urcujı polohu robota. Bod trasy s pevnou polohou lze zadat fy-zickym premıstenım robota do teto polohy.
4.6 Nastavenı bodu trasy
Stisknutım tohoto tlacıtka prejdete na obrazovku Pohyb, na nız muzete zadatpolohu robota pro tento bod trasy. Pokud se bod trasy nachazı pod prıkazemPohyb v linearnım prostoru (Pohyb L nebo Pohyb P), je nutne zvolit platny prvekpro tento prıkaz Pohyb, aby bylo tlacıtko aktivnı.
Nazvy bodu trasy
Nazvy bodu trasy lze zmenit. Dva body trasy se stejnym nazvem predstavujıtentyz bod trasy. Pri zadavanı jsou body trasy cıslovany.
Uhel kombinace
Kdyz je nastaven uhel kombinace, trajektorie robota prochazı kolem bodu trasy,coz umoznuje, aby se robot v tomto bodu nezastavil. Kombinace se nesmı prekryvat,proto nelze zadat uhel kombinace, ktery se prekryva s uhlem kombinace propredchozı nebo nasledujıcı bod trasy. Bod zastavenı je bod trasy s uhlem kom-binace 0.0mm.
Poznamka k nacasovanı V/V
Pokud je bod trasy bod zastavenı s prıkazem V/V jakozto nasledujıcım prıkazem,bude prıkaz V/V proveden, kdyz se robot v tomto bode trasy zastavı. Pokud vsakbod trasy predstavuje uhel kombinace, bude nasledujıcı prıkaz V/V proveden,kdyz robot prejde do kombinace.
All Rights Reserved 31 PolyScope

4. Programovanı
Prıklad
Waypoint2
WaypointStartmovel
Waypoint1
if (digital_input[1]) then
else
endif
WaypointEnd1
WaypointEnd2
Program
Ending point 1
Starting point
Straight line segment
5 cm blendWaypoint 1
Waypoint 210 cm blend
Ending point 2
Straight line segment
This is where the inputport is read!
Zde je maly prıklad, kdy program robota pohybuje nastrojem od pocatecnı po-lohy do jedne ze dvou koncovych poloh v zavislosti na stavu promenne digital input[1].Trajektorie nastroje (tlusta cerna cara) probıha prımo v oblastech mimo kombi-nace (carkovane kruznice) a odchyluje se od prımeho smeru uvnitr oblastı kom-binace. Stav senzoru digital input[1] je zjist’ovan, jakmile robot vstoupı dooblasti kombinace kolem Bodu trasy 2, prestoze prıkaz if...then je v pro-gramove sekvenci zadan az za Bodem trasy 2. Toto resenı muze vypadat ne-logicky, je vsak nutne k tomu, aby robot zvolil spravnou trasu kombinace.
4.7 Program→ karta Prıkaz, Relativnı bod trasy
Jedna se o bod trasy udavajıcı polohu vzhledem k predchozı poloze ro-bota, naprıklad
”o 2 cm doleva“. Relativnı poloha je definovana jako rozdıl mezi
All Rights Reserved 32 PolyScope

4. Programovanı
dvema danymi polohami (vlevo a vpravo). Opakovane relativnı polohy vsakmohou zpusobit odchylenı robota z pracovnıho prostoru.
Jedna se zde o kartezskou vzdalenost mezi TCP ve dvou polohach. Uheluvadı, jak moc se zmenila orientace TCP mezi dvema polohami. Presneji receno,delka vektoru rotace popisuje zmenu v orientaci.
4.8 Program→ karta Prıkaz, Promenny bod trasy
Jedna se o bod trasy urceny promennou, v tomto prıpade calculated pos.Promenna musı byt pozice, napr.var=p[0,5;0,0;0,0;3,14;0,0;0,0]. Prvnı tri hodnoty jsou souradnice x,y,z a po-slednı tri jsou orientace dane jako vektor rotace urcene vektory rx,ry,rz. Delka osyudava uhel otocenı v radianech a vlastnı vektor predstavuje osu otacenı. Poziceje vzdy dana ve vztahu k referencnımu ramci nebo souradnicovemu systemudefinovanemu zvolenym prvkem. Robot se vzdy pohybuje linearne smerem k promennemubodu trasy.
Chcete-li naprıklad presunout robota o 20 mm podel osy Z nastroje:
var_1=p[0,0,0.02,0,0,0]Pohyb L
Bod_1 (promenna poloha): Promenna=var_1, Prvek=Nastroj
All Rights Reserved 33 PolyScope

4. Programovanı
4.9 Program→ karta Prıkaz, Cekat
Ceka po urcenou dobu nebo na signal V/V.
4.10 Program→ karta Prıkaz, Akce
Slouzı k nastavenı digitalnıch nebo analogovych vystupu na danou hodnotu.Tuto polozku lze rovnez pouzıt k nastavenı nakladu robota, naprıklad hmotnosti,kterou robot zvedne na konci teto akce. Uprava hmotnosti muze byt nutna,aby se zabranilo neocekavanemu bezpecnostnımu zastavenı robota, pokud jehmotnost nastroje odlisna od ocekavane hmotnosti.
All Rights Reserved 34 PolyScope

4. Programovanı
4.11 Program→ karta Prıkaz, Samostatne okno
Samostatne okno predstavuje zpravu zobrazenou na obrazovce, kdyz pro-gram dosahne tohoto prıkazu. Lze volit styl zpravy a zadat vlastnı text pomocıklavesnice na obrazovce. Robot bude cekat az uzivatel / obsluha stiskne tlacıtko
”OK“ pod samostatnym oknem, a pote bude pokracovat v provadenı programu.
Pokud je zvolena polozka”Zastavit provadenı programu“, program robota se
v prıpade zobrazenı tohoto samostatneho okna zastavı.
4.12 Program→ karta Prıkaz, Zastavit
Provadenı programu se v tomto bode zastavı.
All Rights Reserved 35 PolyScope

4. Programovanı
4.13 Program→ karta Prıkaz, Komentar
Zde muze programator zadat radek textu k programu. Tento radek textu ne-bude mıt zadny vliv na vykonanı programu.
4.14 Program→ karta Prıkaz, Slozka
Slozka slouzı k usporadanı a oznacenı urcitych castı programu, vycistenı pro-gramoveho stromu a prehlednejsı navigaci a ctenı programu.
Samotna slozka neprovadı zadne akce.
All Rights Reserved 36 PolyScope

4. Programovanı
4.15 Program→ karta Prıkaz, Cyklus
Zakladnı prıkazy programu se budou cyklicky opakovat. V zavislosti na vyberujsou prıkazy zakladnıho programu provadeny v nekonecnem cyklu, v urcitempoctu opakovanı, nebo dokud je dana podmınka pravdiva. Pri provadenı urcitehopoctu cyklu je vytvorena vyhrazena promenna cyklu (oznacena jako loop 1 nasnımku obrazovky vyse), kterou lze pouzıt ve vyrazech v ramci cyklu. Promennacyklu ma hodnoty od 0 do N − 1.
Pokud je pouzit cyklus s vyrazem jako koncovou podmınkou, umoznuje roz-hranı PolyScope nepretrzite vyhodnocovanı tohoto vyrazu, takze
”cyklus“ lze
prerusit kdykoli behem provadenı, nikoli pouze po kazdem zopakovanı.
4.16 Program→ karta Prıkaz, Podprogram
All Rights Reserved 37 PolyScope

4. Programovanı
Podprogram muze obsahovat casti programu, ktere jsou nutne na nekolikamıstech. Podprogram muze mıt podobu samostatneho souboru na disku a muzebyt rovnez skryty z duvodu ochrany pred nezadoucımi zmenami.
Program→ karta Prıkaz, Vyvolat podprogram
Vyvolanı podprogramu vykona programove radky v podprogramu a potese vratı na nasledujıcı radek.
4.17 Program→ karta Prıkaz, Zadanı
Slouzı k zadanı hodnot promennych. Po zadanı bude vypocıtana hodnotauvedena vpravo pouzita pro promennou uvedenou vlevo. Toto nastavenı muzebyt uzitecne u slozitych programu.
All Rights Reserved 38 PolyScope

4. Programovanı
4.18 Program→ karta Prıkaz, If
Struktura”if..then..else“ muze zmenit chovanı robota na zaklade vstupu sen-
zoru nebo hodnot promennych. Pomocı editoru vyrazu muzete urcit podmınky,po jejichz splnenı bude robot pokracovat k dılcım prıkazum tohoto prıkazu If.Pokud je podmınka vyhodnocena jako pravdiva, budou provedeny radky v ramcitohoto prıkazu If.
Kazdy prıkaz If muze obsahovat nekolik prıkazu ElseIf a jeden prıkaz Else.K jejich pridanı slouzı tlacıtka na obrazovce. Prıkaz ElseIf pro dany prıkaz lzez obrazovky odstranit.
Otevrene okno Nepretrzite kontrolovat vyraz umoznuje vyhodnocovanıpodmınek prıkazu If a ElseIf behem provadenı obsazenych radku. Pokud jevyraz vyhodnocen jako nepravda, kdyz je obsazen v ramci prıkazu If, prejdeprogram na nasledujıcı prıkaz ElseIf nebo Else.
All Rights Reserved 39 PolyScope

4. Programovanı
4.19 Program→ karta Prıkaz, Skript
Tento prıkaz umoznuje prıstup k zakladnımu jazyku skriptu v realnem case,ktery je provaden ovladacem robota. Tato moznost je urcena pouze pro zkuseneuzivatele.
Pomocı volby”Soubor“ v levem hornım rohu lze vytvaret a upravovat pro-
gramove soubory skriptu. Tımto zpusobem lze dlouhe a slozite skripty pouzıvatspolecne s uzivatelsky nenarocnym programovanım v rozhranı PolyScope.
4.20 Program→ karta Prıkaz, Udalost
Udalost lze pouzıt k monitorovanı vstupnıho signalu a provedenı akce ci na-stavenı promenne, kdyz je vstupnı signal vysoky. Naprıklad v prıpade, ze vystupnısignal prepne na vysokou hodnotu, vycka program 100 ms a opet nastavı nızky
All Rights Reserved 40 PolyScope

4. Programovanı
signal. Tım je umozneno mnohem jednodussı kodovanı hlavnıho programu proprıpad, kdy externı stroj aktivuje nabeznou hranu impulsu namısto vysoke urovnevstupu.
4.21 Program→ karta Prıkaz, Vlakno
Vlakno oznacuje paralelnı proces programu robota. Vlakno lze vyuzıt k ovladanıexternıho stroje nezavisle na ramenu robota. Vlakno muze komunikovat s pro-gramem robota pomocı promennych a vystupnıch signalu.
4.22 Program→ karta Prıkaz, Tvar
Prıkaz Tvar lze pouzıt k cyklickemu prochazenı polohami v programu robota.Prıkaz Tvar odpovıda jedne poloze pri kazdem provedenı.
All Rights Reserved 41 PolyScope

4. Programovanı
Tvar lze zadat jako jeden ze ctyr typu. Prvnı tri moznosti,”Prımka“,
”Ctverec“
a”Kvadr“, lze pouzıt pro polohy v pravidelnem tvaru. Pravidelne tvary jsou de-
finovany poctem charakteristickych bodu, pricemz body definujı hrany tvaru.
”Prımka“ je dana dvema koncovymi body,
”Ctverec“ je dan tremi ze ctyr vr-
cholu,”Kvadr“ je dan ctyrmi z osmi vrcholu. Programator zada pocet poloh
na kazde hrane tvaru. Ovladac robota pote vypocıta jednotlive polohy tvarupomernym sectenım vektoru hran.
Pokud polohy, jimiz je nutne projıt, netvorı pravidelny tvar, lze vybrat moznost
”Seznam“, pomocı ktere programator muze zadat seznam vsech poloh. Tımto
zpusobem lze dosahnout libovolneho usporadanı poloh.
Definice tvaru
Kdyz vyberete tvar”Kvadr“, bude mıt obrazovka nasledujıcı podobu.
Tvar”Kvadr“ pouzıva tri vektory k definovanı stran kvadru. Tyto tri vektory jsou
urceny ctyrmi body, pricemz prvnı vektor smeruje z prvnıho bodu do druheho,druhy vektor smeruje z druheho bodu do tretıho a tretı vektor smeruje ze tretıhobodu do ctvrteho. Kazdy vektor je rozdelen poctem intervalu. Konkretnı polohav ramci tvaru je vypoctena jednoduchym pomernym prictenım intervalovychvektoru.
Tvary”Prımka“ a
”Ctverec“ fungujı podobe.
Pri prochazenı poloh v ramci tvaru je pouzıvana promenna pocitadla. Nazevpromenne se zobrazuje na obrazovce prıkazu Tvar. Promenna cyklicky prochazıhodnotami od 0 do X ∗Y ∗Z − 1, coz je pocet bodu tvaru. Touto promennou lzemanipulovat pomocı zadanı a take ji pouzıt ve vyrazech.
All Rights Reserved 42 PolyScope

4. Programovanı
4.23 Program→ karta Prıkaz, Sıla
Rezim sıly umoznuje pruzne chovanı a pouzitı funkce sıly ve vybranych osachpracovnıho prostoru robota. Vsechny pohyby robota provadene na zakladeprıkazu Sıla (Force) budou v rezimu sıly. Kdyz se robot pohybuje v rezimu sıly, jemozne vybrat jednu nebo nekolik os, ve kterych se robot chova pruzne v zavislostina vnejsıch silach, ktere na nej pusobı. Podel / kolem os s pruznym chovanım serobot bude chovat pruzne podle prostredı, coz znamena, ze automaticky upravısvou polohu, aby dosahl pozadovane sıly. Je rovnez mozne provest to, aby ro-bot sam pouzil sılu na jeho prostredı, napr. na obrobek.
Rezim sıly je vhodny pro aplikace, kde aktualnı poloha TCP podel predemdefinovane osy nenı dulezita, ale mısto toho je pozadovano pusobenı sıly podelteto osy. Naprıklad jestlize by se mel stredovy bod nastroje TCP odvalovat protizakrivenemu povrchu nebo pri tlacenı nebo vlecenı obrobku. Rezim sıly rovnezpodporuje pusobenı urciteho kroutıcıho momentu okolo predem definovanychos. Jestlize se robot nesetka s zadnymi prekazkami v ose, kde je nastavena ne-nulova sıla, bude se snazit podel nebo na teto ose zrychlit.
I kdyz byla nektera osa zvolena pro pruzne chovanı, program robota senadale bude snazit pohybovat robotem podel nebo okolo teto osy. Nicmenerızenı sıly zajist’uje, ze robot bude nadale nabıhat na zadanou sılu.
Volba prvku
Nabıdka prvku je pouzıvana pro vyber souradnicoveho systemu (os), ktere robotbude pouzıvat kdyz bude pracovat v rezimu sıly. Prvky v nabıdce jsou ty, kterebyly definovany v instalaci, viz 3.11.
Typ rezimu sıly
K dispozici jsou ctyri typy rezimu sıly. Kazdy z nich urcuje zpusob jakym budevybrany prvek interpretovan.
All Rights Reserved 43 PolyScope

4. Programovanı
• Jednoduchy: Pouze jedna osa v rezimu sıly bude s pruznym chovanım.Sıla podel teto osy je nastavitelna. Pozadovana sıla bude vzdy pouzıvanapodel osy Z vybraneho prvku. Nicmene pro prımkove prvky je to podeljejich osy Y.
• Ramec: Typ ramce umoznuje pokrocilejsı vyuzıvanı. Zde je mozne nezavislevybırat pruzne chovanı a sıly ve vsech sesti stupnıch volnosti.
• Bod: Kdyz je vybrana funkce Bod, tak ma ukolovy ramec osu Y smerujıcıod stredoveho bodu nastroje (TCP) robota smerem k pocatku (Origo) vy-braneho prvku. Vzdalenost mezi stredovym bodem nastroje (TCP) robotaa pocatkem (Origo) vybraneho prvku musı byt minimalne 10 mm. Ukolovyramec se bude menit v prubehu programu tak, jak se bude menit polohastredoveho bodu nastroje (TCP) robota. Osa X a osa Z ukoloveho ramcezavisı na puvodnı orientaci vybraneho prvku.
• Pohyb: Funkce pohybu znamena, ze se ukolovy ramec bude menit podlesmeru pohybu stredoveho bodu nastroje (TCP). Osa X ukoloveho ramcebude projekcı smeru pohybu TCP na rovine rozpınajıcı se mezi osami X a Yvybraneho prvku. Osa Y bude kolma k pohybu robota a v rovine X-Y vy-braneho prvku. To je mozne vyuzıvat pri odstranovanı otrepu podel slozitedrahy, kde je pozadovana sıla kolma k pohybu TCP. Kdyz se robot nepo-hybuje: Jestlize je zadan rezim sıly, kdyz je robot v klidu, potom nebudouk dispozici zadne osy s pruznym chovanım, dokud se TCP nezacne pohy-bovat. Jestlize se pozdeji, stale v rezimu sıly, robot opet zastavı, bude mıtukolovy ramec stejnou orientaci, jako kdyz se TCP naposledy pohyboval.
Pro poslednı tri typy muze byt aktualnı ukolovy ramec zobrazen pri behu pro-gramu na karte grafiky (4.27), kdyz robot pracuje v rezimu sıly.
Vyber hodnoty sıly
Sıla muze byt nastavena jak pro osy s pruznym chovanım, tak take pro osy bezpruzneho chovanı. Ucinky vsak jsou rozdılne.
• Osa s pruznym chovanım: Robot upravı svou polohu, aby dosahl zvolenesıly.
• Osa bez pruzneho chovanı: Robot bude sledovat svou programem nasta-venou trajektorii, pricemz realizuje nastavenou hodnotu externı sıly.
Pro translacnı parametry je sıla specifikovana v Newtonech [N] a pro rotacnıparametry je krouticı moment specifikovan v Newtonmetrech [Nm].
Vyber meznıch hodnot
Meznı hodnotu je mozne nastavit pro vsechny osy, ale tyto hodnoty majı rozdılnyvyznam podle toho, zda jsou to osy s pruznym chovanım nebo bez pruznehochovanı.
• Osa s pruznym chovanım: Meznı hodnota je maximalnı dovolena rychlostTCP, kterou muze dosahnout podel teto osy nebo na nı. Jednotkami jsou[mm/s] a [◦/s].
• Osa bez pruzneho chovanı: Meznı hodnota je maximalnı povolena od-chylka od programove trajektorie, nez je robot z bezpecnostnıch duvoduzastaven. Jednotkami jsou [mm] a [◦].
All Rights Reserved 44 PolyScope

4. Programovanı
Nastavenı testovacı sıly
Tlacıtko zapnutı a vypnutı, test ucenı, prepına chovanı tlacıtka”Ucenı“ na zadnı
strane prenosneho ovladacıho terminalu z normalnıho rezimu ucenı na test prıkazusıly. Kdyz je zapnuto tlacıtko testu ucenı a zmackne se tlacıtko
”Ucenı“ na zadnı
strane prenosneho ovladacıho terminalu, robot bude provadet cinnost, jakokdyz program dosahl tohoto prıkazu sıly. Tımto zpusobem je mozne overit na-stavenı pred skutecnym spustenım celeho programu. Tato moznost je obzvlasteuzitecna pro overenı, ze byly spravne vybrany osy s pruznym chovanım a sıly.Jednoduse podrzte jednou rukou TCP robota a druhou rukou zmacknete tlacıtko
”Ucenı“ a povsimnete si, ve kterem smeru se robot muze/nemuze pohybovat. Po
odchodu z teto obrazovky se tlacıtko testu ucenı automaticky vypne, coz zna-mena, ze tlacıtko
”Ucenı“ na zadnı strane prenosneho ovladacıho terminalu je
opet pouzıvano pro volny rezim ucenı. Poznamka: Tlacıtko”Ucenı“ bude funkcnı
pouze tehdy, kdyz bude pro prıkaz sıly vybran platny prvek.
4.24 Program→ karta Prıkaz, Paleta
Paletova operace provadı sekvenci pohybu na skupine mıst nastavenychjako tvar. Viz popis v casti 4.22. V kazde poloze v ramci tvaru bude provedenasekvence pohybu vzhledem k teto poloze v ramci tvaru.
Naprogramovanı paletove operace
Proved’te nasledujıcı kroky:
1. Definujte tvar.
2. Vytvorte”Paletovou sekvenci“ zvednutı a polozenı pro kazdy jednotlivy
bod. Tato sekvence popisuje, co je nutne provest v jednotlivych polohachv ramci tvaru.
3. Pomocı volice na obrazovce sekvencnıho prıkazu muzete definovat, kterebody trasy v ramci sekvence budou odpovıdat poloham ve tvaru.
All Rights Reserved 45 PolyScope

4. Programovanı
Paletova sekvence / ukotvena sekvence
V uzlu Paletova sekvence jsou pohyby robota relativnı k poloze palety. Chovanısekvence je takove, ze robot se bude nachazet v poloze dane tvarem v nasta-venı Ukotvena poloha / bod tvaru. Vsechny zbyvajıcı polohy budou presunutytak, aby vyhovovaly nastavenı.
Nepouzıvejte prıkaz Pohyb v ramci sekvence, protoze pohyb nebude rela-tivnı vzhledem k ukotvene poloze.
”Pred zahajenım“
Volitelna sekvence Pred zahajenım je provedena bezprostredne pred zahajenımoperace. Toto nastavenı lze pouzıt k cekanı na pripraveny signal.
”Po dokoncenı“
Volitelna sekvence Po dokoncenı je provedena po dokoncenı operace. Taktolze dat signal ke spustenı pohybu dopravnıku a prıprave na dalsı paletu.
4.25 Program→ karta Prıkaz, Hledat
Funkce hledanı pouzıva senzor k urcenı toho, zda byla dosazena spravna po-loha pro uchopenı a polozenı polozky. Jako senzor muze byt pouzit tlacıtkovyspınac, tlakovy snımac nebo kapacitnı senzor. Tato funkce je urcena k pracise zasobnıky polozek s ruznou tloust’kou polozek nebo tam, kde pevna polohapolozek nenı znama nebo ji nelze snadno naprogramovat.
Nakladanı Vykladanı
Pri programovanı funkce hledanı pro praci se zasobnıkem je nutne definovats pocatecnı bod, d smer zasobnıku a i tloust’ku polozek v zasobnıku.
Vedle toho je nutne definovat podmınku, za ktere je dosazena poloha dalsıhozasobnıku, a specialnı programovou sekvenci, ktera bude v kazde poloze zasobnıkuprovedena. Pro pohyb v ramci operace se zasobnıky je rovnez nutne zadat hod-noty rychlosti a zrychlenı.
All Rights Reserved 46 PolyScope

4. Programovanı
Nakladanı
Pri nakladanı robot postupuje od pocatecnı polohy opacnym smerem a vy-hledava dalsı polohu zasobnıku. Po nalezenı si robot polohu zapamatuje a pro-vede specialnı sekvenci. Pri prıstı operaci zahajı robot hledanı v zapamatovanepoloze a postupuje v krocıch danych tloust’kou polozky danym smerem. Nakladanıje dokonceno, jakmile vyska zasobnıku prekrocı definovanou hodnotu nebojakmile senzor odesle signal.
Vykladanı
Pri vykladanı robot postupuje od pocatecnı polohy danym smerem a vyhledavadalsı polozku. Po nalezenı si robot polohu zapamatuje a provede specialnı sek-venci. Pri prıstı operaci zahajı robot hledanı v zapamatovane poloze a postupujev krocıch danych tloust’kou polozky danym smerem.
All Rights Reserved 47 PolyScope

4. Programovanı
Pocatecnı poloha
Pocatecnı poloha, ve ktere operace se zasobnıkem zacına. Pokud je pocatecnıpoloha vynechana, povazuje robot za pocatek zasobnıku svoji aktualnı polohu.
Smer
Smer je dan dvema polohami a je vypocıtan jako rozdıl mezi TCP prvnı polohya TCP druhe polohy. Poznamka: Smer nezohlednuje orientaci bodu.
Vyraz pro dalsı polohu skladanı
Robot se pohybuje ve smeru vektoru a pritom nepretrzite vyhodnocuje, zda byladosazena dalsı poloha skladanı. Kdyz je vyraz vyhodnocen jako pravdivy, jeprovedena specialnı sekvence.
”Pred zahajenım“
Volitelna sekvence Pred zahajenım je provedena bezprostredne pred zahajenımoperace. Toto nastavenı lze pouzıt k cekanı na pripraveny signal.
”Po dokoncenı“
Volitelna sekvence Po dokoncenı je provedena po dokoncenı operace. Taktolze dat signal ke spustenı pohybu dopravnıku a prıprave na dalsı zasobnık.
Sekvence zvednutı a polozenı
Stejne jako u paletove operace (4.24) je pro kazdou polohu zasobnıku prove-dena specialnı programova sekvence.
All Rights Reserved 48 PolyScope

4. Programovanı
4.26 Program→ karta Prıkaz, Potlacit
Potlacene radky programu jsou pri provadenı programu jednoduse vynechany.Potlacenı radku lze kdykoli pozdeji opet zrusit. Jedna se o rychly zpusob provadenızmen v programu bez nutnosti odstranenı puvodnıho obsahu.
All Rights Reserved 49 PolyScope

4. Programovanı
4.27 Program→ karta Grafika
Graficke znazornenı aktualnıho programu robota. Trasa TCP je znazornenav 3D zobrazenı, pricemz pohybove segmenty jsou oznaceny cerne a segmentykombinacı (prechodu mezi pohybovymi segmenty) jsou oznaceny zelene. Ze-lene tecky urcujı polohu TCP v kazdem z bodu trasy programu. 3D nakres robotaznazornuje aktualnı polohu robota a
”stın“ robota znazornuje predpokladany
pohyb robota do bodu trasy zvoleneho vlevo na obrazovce.
3D obraz lze zvetsit a otocit pro potreby prehlednejsıho zobrazenı robota.Tlacıtka vpravo nahore na obrazovce slouzı k deaktivaci ruznych grafickychsoucastı 3D zobrazenı.
Zobrazene pohybove segmenty zavisejı na vybranem programovem uzlu.Kdyz je vybran uzel Pohyb, zobrazena trasa predstavuje pohyb, ktery je jım de-finovan. Kdyz je vybran uzel Bod trasy, zobrazuje se na displeji nasledujıcıch∼ 10 kroku pohybu.
All Rights Reserved 50 PolyScope

4. Programovanı
4.28 Program→ karta Struktura
Karta Struktura na strance Program umoznuje vlozenı, presunutı, kopırovanı aodstranenı ruznych typu prıkazu.
Chcete-li vlozit nove prıkazy, proved’te nasledujıcı kroky:
1) Vyberte existujıcı prıkaz programu.
2) Vyberte, zda ma byt novy prıkaz vlozen nad nebo pod vybrany prıkaz.
3) Stisknete tlacıtko odpovıdajıcı typu prıkazu, ktery chcete vlozit. Chcete-liupravit podrobnosti noveho prıkazu, prejdete na kartu Prıkaz.
Prıkazy lze presunovat, klonovat a odstranit pomocı tlacıtek v ramu uprav. Po-kud prıkaz obsahuje podprıkazy (vedle prıkazu se zobrazuje trojuhelnık), budoupresunuty, klonovany ci odstraneny rovnez vsechny podprıkazy.
Nektere prıkazy nelze umıstit na nektera mısta v programu. Body trasy musıbyt pod prıkazem Pohyb (nikoli nutne bezprostredne pod nım). Prıkazy ElseIfa Else musı byt umısteny az za prıkazem If. Obecne platı, ze presun prıkazuElseIfmuze program nevhodne zmenit. Promenne vyzadujı pred pouzitım prirazenıhodnoty.
All Rights Reserved 51 PolyScope

4. Programovanı
4.29 Program→ karta Promenne
Karta Promenne uvadı aktualnı hodnoty promennych v bezıcım programu azaznamenava seznam promennych a hodnot mezi jednotlivymi spustenımi pro-gramu. Karta Promenne se zobrazı pouze tehdy, obsahuje-li nejake informace.Nazvy promennych na teto obrazovce jsou zobrazeny s maximalne 50 znakya hodnoty promennych jsou zobrazeny s maximalne 500 znaky.
4.30 Program→ karta Prıkaz, Inicializace promennych
Tato obrazovka slouzı k nastavenı hodnot promennych pred spustenım programu(a prıpadnych vlaken).
Vyberte promennou ze seznamu promennych kliknutım nebo pomocı polepro volbu promenne. Pro zvolenou promennou muzete zadat vyraz, ktery budepouzit k urcenı hodnoty promenna na zacatku programu.
All Rights Reserved 52 PolyScope

5. Nastavenı
Pokud je zaskrtnuto polıcko”Preferuje ponechanı hodnoty z poslednıho spustenı“,
bude promenna inicializovana na hodnotu uvedenou na karte Promenne, kteraje popsana v casti 4.29. Tım je umozneno, aby promenne zachovaly sve hod-noty mezi jednotlivymi spustenımi programu. Promenna zıska hodnotu z vyrazu,kdyz je program spusten poprve nebo kdyz je karta s hodnotou vymazana.
Promennou lze odstranit z programu tak, ze nastavıte prazdny nazev promenne(pouze mezery).
5 Nastavenı
5.1 Obrazovka Nastavenı
• Inicializovat robota Slouzı k prechodu na obrazovku inicializace, viz cast 5.2.
• Jazyk Slouzı ke konfiguraci jazyka a mernych jednotek, viz cast 5.3.
• Aktualizovat Aktualizuje software robota na novejsı verzi, viz cast 5.4.
• Nastavit heslo Umoznuje uzamknutı programovacı casti robota, ktera taknenı prıstupna osobam bez znalosti hesla, viz cast 5.5.
• Kalibrovat obrazovku Slouzı ke kalibraci”dotyku“ na dotykove obrazovce,
viz cast 5.6.
• Nastavenı sıte Otevre rozhranı pro nastavenı pripojenı robota k sıti Ethernet,viz cast 5.7.
• Cas Slouzı k nastavenı casu a data pro system a konfiguraci formatu zob-razenı hodin, viz cast 5.8.
• Zpet Slouzı k navratu na uvodnı obrazovku.
All Rights Reserved 53 PolyScope

5. Nastavenı
5.2 Obrazovka Nastavenı→ Inicializovat
Tato obrazovka se pouzıva pri zapnutı robota. Pred zahajenım normalnı cinnostirobota je nutne, aby se kazdy kloub mırne pohnul (priblizne 20◦) a zjistil svoupresnou polohu. Tlacıtkem Auto navedete vsechny klouby do polohy OK. Pouvolnenı a opetovnem stisknutı tlacıtka se smer pohybu kloubu zmenı.
5.3 Obrazovka Nastavenı→ Volba jazyka
Tato obrazovka umoznuje volbu jazyka a mernych jednotek pouzıvanychv softwaru PolyScope a v napovede. Zaskrtnete moznost
”Programovanı v an-
glictine“, chcete-li pouzıvat programovanı v anglictine. Aby byly zmeny pouzity,je nutne rozhranı GUI restartovat.
All Rights Reserved 54 PolyScope

5. Nastavenı
5.4 Obrazovka Nastavenı→ Aktualizace
Aktualizace softwaru lze nainstalovat z pameti USB flash. Vlozte pamet’ove zarızenıUSB a kliknutım na tlacıtko Hledat zobrazte jeho obsah. Chcete-li provest ak-tualizaci, vyberte soubor, kliknete na moznost Aktualizovat a postupujte podlepokynu na obrazovce.
5.5 Obrazovka Nastavenı→ Heslo
Prıstup k programovacı casti softwaru lze zamknout pomocı hesla. Pri za-mknutı lze programy nacıst a spustit bez pouzitı hesla, ale k vytvarenı a zmeneprogramu bude heslo vyzadovano.
All Rights Reserved 55 PolyScope

5. Nastavenı
5.6 Obrazovka Nastavenı→ Kalibrovat dotykovou obrazovkou
Kalibrace dotykove obrazovky. Kalibraci dotykove obrazovky proved’te podlepokynu na obrazovce. Pokud je to mozne, pouzijte nekovovy objekt s hrotem,napr. zavrene pero. Trpelivost a peclivost vam pomohou dosahnout lepsıchvysledku.
5.7 Obrazovka Nastavenı→ Sıt’
Panel pro nastavenı sıte Ethernet. Ethernetove pripojenı nenı pro zakladnı funkcerobota nezbytne a ve vychozım nastavenı je zakazano.
All Rights Reserved 56 PolyScope

5. Nastavenı
5.8 Obrazovka Nastavenı→ Cas
Slouzı k nastavenı casu a data pro system a konfiguraci formatu zobrazenı ho-din. Hodiny se zobrazujı nahore na obrazovkach SPUSTIT program a PROGRAMRobot. Klepnutım kratce zobrazıte datum. Aby byly zmeny pouzity, je nutne roz-hranı GUI restartovat.
All Rights Reserved 57 PolyScope