Embed Size (px)
Citation preview

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 1/13
PROTOCOLO CANOPEN
¿QUÉ ES EL PROTOCOLO CANOPEN?: CANopen es un protocolo decomunicaciones de alto nivel, para uso industrial, basado en el bus
CAN (ISO 11898) y recogido en la norma N !"#$!%&'
CANopen a sido desarrollado por CiA (CAN in Automation),asociacin sin *nimo de lucro +ormada por +abricantes y usuarios delbus CAN'
a red CANopen es una red basada en CAN, lo -ue signi.ca decir -ueella utili/a telegramas CAN para intercambios de datos en la red'
CANopen es un protocolo de comunicacin -ue utili/a la capa +0sica de
red de controladores de *rea (CAN) -ue usted puede usar como unbus interno para dispositivos embebidos y aplicaciones demovimiento' ise2ado originalmente para redes de control dem*-uinas orientadas a movimiento como sistemas de mane3o,CANopen aora es parte de una variedad de productos y aplicaciones,incluyendo e-uipo m4dico, ve0culos de campo traviesa, electrnicamar0tima, transporte p5blico y automati/acin en construccin'
¿CÓMO ESTÁ CONSTITUIDO? n CANopen ay documentos -uedescriben per.les' 6ay un per.l de comunicaciones (communication
pro.le) donde est*n descritos todos los par*metros relacionados conlas comunicaciones' Adem*s ay varios per.les de dispositivos(device pro.les) donde se de.nen los ob3etos de un dispositivo enparticular'
7n per.l de.ne para cada ob3eto del diccionario su +uncin, nombre,0ndice, sub0ndice, tipos de datos, si es obligatorio u opcional, si es deslo lectura, slo escritura o lectura%escritura, etc'
os dispositivos se estructuran en tres unidades +uncionales:
• Comunicaciones: ;roporciona los ob3etos de comunicacin y la+uncionalidad necesaria para transportar los datos a trav4s dela red subyacente'
• iccionario de ob3etos: s una coleccin de todos los elementosde datos -ue tienen in<uencia en el comportamiento de losob3etos de aplicacin, los ob3etos de comunicacin y la m*-uinade estados del dispositivo'
• Aplicacin: engloba la +uncionalidad del dispositivo con respecto
a la interaccin con el proceso'

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 2/13
l diccionario de ob3etos +unciona como una inter+a/ entre lascomunicaciones y la aplicacin' a descripcin completa de la unidadde aplicacin de un dispositivo, con respecto a los datos deliccionario de ob3etos recibe el nombre de perfl de dispositivo'
CARACTERÍSTICAS BIEN IMPORTANTES. as principalescaracter0sticas del protocolo CAN open son:
7n 5nico bus de transmisin' =elocidad de comunicacin de asta 1 >bit?s' a velocidad de
transmisin puede ser di+erente en distintos sistemas' n unsistema la velocidad debe de ser uni+orme'
Se emplean dos cables por los cuales via3an dos se2alese@actamente iguales en amplitud y +recuencia perocompletamente inversas en volta3e' os mdulos con estos dos
pulsos identi.can el mensa3e, pero tambi4n tiene opciones demantener la red activa aun-ue +alle uno de los cables decomunicacin'
=alores de us (ominante o recesivo)' os nodos conectados albus interpretan dos niveles lgicos denominados:- ominante: la tensin di+erencial (CANB6%CANB) es del
orden de $'" = con CANB6 #'!= y CANB 1'!=(nominales)'
- Decesivo: la tensin di+erencial (CANB6%CANB) es del ordende "= con CANB6 CANB $'!= (nominales)'
os mensa3es CAN poseen un +ormato .3o -ue puede tener
di+erentes longitudes seg5n el tipo de trama' Cada mensa3e tiene un identi.cador de mensa3e, -ue es 5nico
en toda la red' l contenido de un mensa3e se especi.ca pordico identi.cador, el cual no indica el destino, sino describe elsigni.cado del mensa3e' Adem*s indica la prioridad delmensa3e, lo cual es importante en el momento en -ue variasestaciones (nodos) compiten por el acceso al bus (arbitra3e debus)'
a peticin de datos remotos se reali/a enviando primero unatrama remota de peticin de trama -ue posee una determinado
identi.cador y esta ser* contestada con otra de.nida con elmismo identi.cador' Ele@ibilidad de la con.guracin' >ultimaestro:
- Si el bus est* libre, cual-uier nodo puede comen/ar atransmitir un mensa3e'
- Cuando dos nodos comien/an a transmitir simult*neamenteel con<icto de acceso al bus es resuelto por arbitra3eutili/ando el identi.cador -ue determina -ue mensa3e esm*s prioritario' l mecanismo de arbitra3e garanti/a -ue ni lain+ormacin ni el tiempo se pierdan'
- Cuando una trama de datos y una trama remota se inician almismo tiempo prevalece la primera'

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 3/13
- urante el arbitra3e todos los transmisores comparan el niveldel bit transmitido con el nivel del bus: Si los niveles soniguales, la unidad puede enviar' Si son distintos, la unidadpierde el arbitra3e y debe retirarse sin enviar otro bit'
- Capítulo
eteccin de error y se2ali/acin: n todos los nodos CAN seimplementan medidas especiales para la deteccin de errores,se2ali/acin y autoFce-ueo'
VELOCIDAD. a velocidad de transmisin depende estrictamente deltipo de cable usado'
n el protocolo CAN, la prioridad de las tramas se gestiona por unacolisin entre los niveles dominantes y recesivos de la l0nea' stacolisin debe resolverse durante la transmisin de un bit, lo -ue limitael tiempo de propagacin de la se2al entre dos nodos'
n las siguientes tablas se especi.ca la longitud m*@ima de cableprincipal en +uncin del cable CANopen -ue proporciona Scneiderlectric (GSHCANCA, GSHCANC y GSHCANC)Longit! "#$i"% !&' (%)'&Como consecuencia, la distancia m*@ima entre los dos nodos m*sale3ados de un bus CAN depende de la velocidad, y se detalla en latabla siguiente:
V&'o(i!%! &n
)it*+
Longit! "#$i"% !&'
(%)'&1 >bit?s $" m (J! +t)8"" Kbit?s &" m (1#1 +t)!"" Kbit?s 1"" m (#$8 +t)$!" Kbit?s $!" m (8$" +t)1$! Kbit?s !"" m (1'J&" +t)!" Kbit?s 1'""" m (#'$8" +t)$" Kbit?s $'!"" m (8'$"$ +t)1" Kbit?s !'""" m (1J'&"& +t)
Seg5n la estrategia de red de Scneider lectric, se recomiendautili/ar las velocidades 1 >bit?s, 8"" Kbit?s, !"" Kbit?s, $!" Kbit?s y1$! Kbit?s para las soluciones de automati/acin en el nivel dem*-uina y de instalacin'
NOTA: a longitud m*@ima asume un tiempo ra/onable depropagacin interna del dispositivo y punto de muestra de bit' osdispositivos -ue presenten tiempos largos de propagacin internareducir*n por este motivo la longitud m*@ima del cable -ue de otramanera se podr0a alcan/ar'

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 4/13
as longitudes de cable de la tabla anterior pueden incluir un cable dederivacin si est* en el e@tremo +0sico del cable principal'
ALCANCES.
TOPOLO,ÍATo-o'og% )#+i(% g&n&/%':a red CANopen consta de una l0nea de transmisin -ue debe estarterminada en ambos e@tremos +0sicos con resistencias de terminacin'7na ca3a de derivacin en combinacin con cables de derivacin+orman una topolog0a en estrella parcial' ;ara minimi/ar los re<e3os,es necesario mantener los cables de derivacin lo m*s cortos posible'a longitud m*@ima de los cables de derivacin depende de lavelocidad de transmisin' ;ara obtener una lista de las longitudes decable permitidas, consulte la tabla ongitud m*@ima del cable'
E0&"-'o !& n% to-o'og% )#+i(%
En el diagrama siguiente se proporciona un ejemplo de una topología básica:
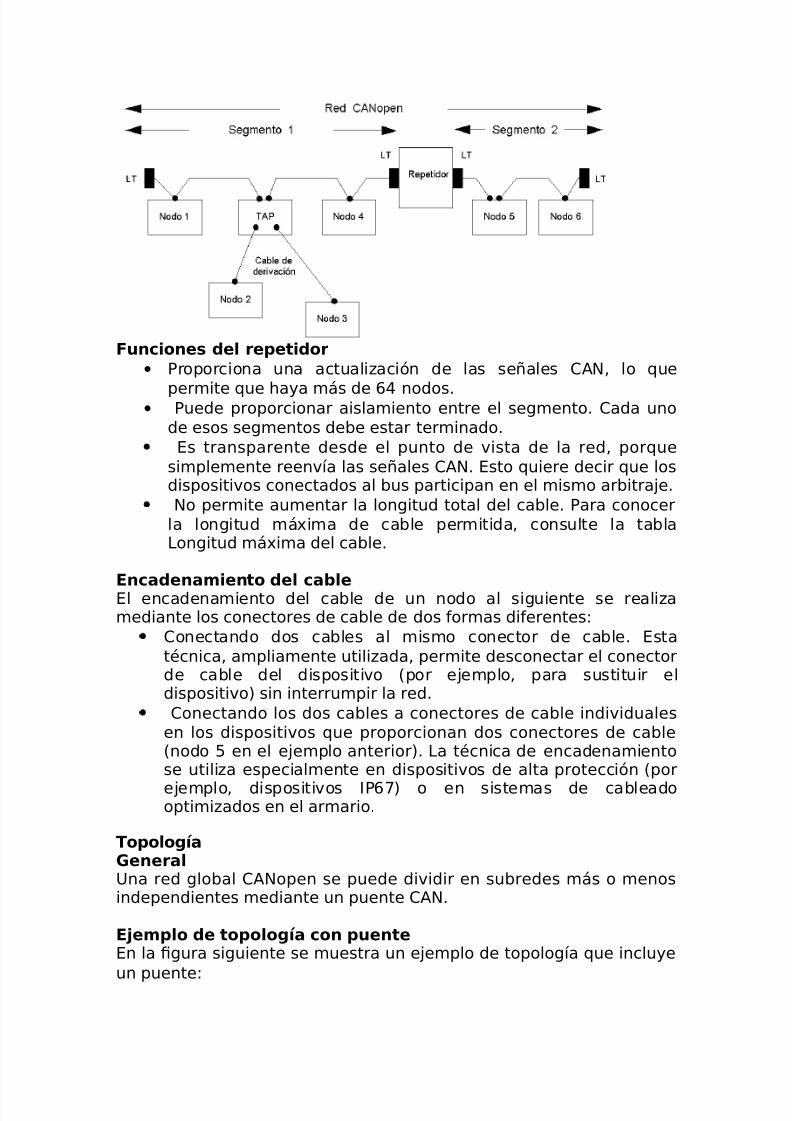
To-o'og% (on n /&-&ti!o/,&n&/%'a red CANopen puede estar compuesta por un 5nico segmento o porvarios segmentos conectados entre s0 mediante un repetidor CAN'
E0&"-'o !& to-o'og% (on /&-&ti!o/
n la siguiente ilustracin se muestra un e3emplo de topolog0a -ueincluye un repetidor:
8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 5/13
1n(ion&+ !&' /&-&ti!o/• ;roporciona una actuali/acin de las se2ales CAN, lo -ue
permite -ue aya m*s de J& nodos'• ;uede proporcionar aislamiento entre el segmento' Cada uno
de esos segmentos debe estar terminado's transparente desde el punto de vista de la red, por-ue
simplemente reenv0a las se2ales CAN' sto -uiere decir -ue losdispositivos conectados al bus participan en el mismo arbitra3e'
No permite aumentar la longitud total del cable' ;ara conocerla longitud m*@ima de cable permitida, consulte la tablaongitud m*@ima del cable'
En(%!&n%"i&nto !&' (%)'&l encadenamiento del cable de un nodo al siguiente se reali/amediante los conectores de cable de dos +ormas di+erentes:
Conectando dos cables al mismo conector de cable' stat4cnica, ampliamente utili/ada, permite desconectar el conectorde cable del dispositivo (por e3emplo, para sustituir eldispositivo) sin interrumpir la red'Conectando los dos cables a conectores de cable individuales
en los dispositivos -ue proporcionan dos conectores de cable(nodo ! en el e3emplo anterior)' a t4cnica de encadenamientose utili/a especialmente en dispositivos de alta proteccin (por
e3emplo, dispositivos I;JL) o en sistemas de cableadooptimi/ados en el armario'
To-o'og%,&n&/%'7na red global CANopen se puede dividir en subredes m*s o menosindependientes mediante un puente CAN'
E0&"-'o !& to-o'og% (on -&nt&n la .gura siguiente se muestra un e3emplo de topolog0a -ue incluyeun puente:

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 6/13
1n(ion&+ !&' -&nt&7n puente:
• Separa la red global CAN en subredes m*s o menosindependientes'
• ;roporciona un arbitra3e individual para cada subred'• ;roporciona la posibilidad de -ue cada subred tenga su propia
velocidad de transmisin'• Se basa en el principio de guardar y reenviar, es decir, los
mensa3es CAN se reciben por una subred y se reenv0an a otrasubred'
• ;ermite utili/ar reglas de .ltrado y traduccin'• ;ermite -ue se realice adaptacin de protocolos entre las
subredes'
A di+erencia del repetidor CAN, el puente CAN permite ampliar eltama2o m*@imo de la red'C%+(%!% !& (%0%+ !& !&/i2%(i3n,&n&/%'No se permite la cascada de ca3as de derivacin de las redesCANopen por-ue podr0a da2ar la caracter0stica de la l0nea detransmisin'E0&"-'o !& (%0%+ !& !&/i2%(i3n &n (%+(%!%
n la ilustracin siguiente se indica -ue las ca3as de derivacin encascada no est*n permitidas en las redes CANopen:

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 7/13
To-o'og% (on 4&nt& !& %'i"&nt%(i3n &$t&/n%,&n&/%';ara proporcionar alimentacin a los nodos de la red CANopen, sepuede conectar una +uente de alimentacin e@terna a una ca3a de
derivacin'E0&"-'o !& n% /&! (on 4&nt& !& %'i"&nt%(i3n &$t&/n%n la ilustracin siguiente se muestra un e3emplo de topolog0a con+uentes de alimentacin e@ternas:
C%0%+ !& !&/i2%(i3n !& %'i"&nt%(i3n6ay disponibles dos tipos de ca3as de derivacin de +uente dealimentacin:
Ti-o !& (%0% !&!&/i2%(i3n
1n(i3n No!o+%'i"&nt%!o+&n &' &0&"-'o
%nt&/io/Ca3a de derivacinm5ltiple dealimentacin
proporciona laalimentacin a loscables de derivacin
$ y #
Ca3a de derivacindealimentacin
proporciona laalimentacin al cablede salida y, porconsiguiente, a losnodos siguientes
! y J

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 8/13
S&5%'&+ !& %'i"&nt%(i3n
a alimentacin es transportada por las se2ales CANB=M y CANBN';uesto -ue esas se2ales se proporcionan en cables CAN est*ndar, nose necesitan cables especiales para la +uente de alimentacin'
R&&n2o !& %'i"&nt%(i3n % t/%26+ !&' (%)'&;ara reenviar la alimentacin a trav4s del cable, se necesita -ue lase2al CANB=M est4 conectada en el conector del cable de cada nodo,incluso si el respectivo nodo no usa la alimentacin sino -ue lareenv0a al nodo siguiente'
Not%: os repetidores, los puentes y los cables D&! no reenv0an lase2al CANB=M en absoluto';ara obtener m*s in+ormacin sobre la distribucin de la alimentacinpor la red, consulte la seccin imitaciones de la capa +0sica
TRAMAS.
T/%"% SDO
n Co,todoslosdatosdeunatrans+erenciadeSOsetransmitenatrav4sdetramasdeSO' as tramas tienen la estructura siguiente:
Jbytes $ bytes 1 bytes $ 1bytes &bytes
1 ''' nbytes
>ailbo@6eader
Co6eader
SOControlyte
Inde@
Subinde@
ata ata
>andatory 6eader Standard CANopen SO Erame optional
Grama SO: estructura de los telegramas:
Co"-on&nt& D&+(/i-(i3n>ailbo@ 6eader atos para la comunicacin de correo electrnico
(longitud, direccin y tipo)Co 6eader Identi.cador del servicio CoSO Control yte Identi.cador de una orden de lectura o de escrituraInde@ Pndice principal del ob3eto de comunicacin CANopen'Subinde@ Sub0ndice del ob3eto de comunicacin CANopenata Contenido de datos del ob3eto de comunicacin
CANopenata (optional) Otros datos opcionales. El controlador de motor CMMP-AS-...-M3
no es compatible con esta opción, ya que solo pueden activarse
obetos CA!open est"ndar. El tama#o m"$imo de dic%os obetos
es 3& bits.
;ara transmitir un ob3eto CANopen est*ndar a trav4s de una tramaSO de estas caracter0sticas, la trama SO CANopen se encapsula en

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 9/13
una trama SO terCAG y se transmite a continuacin' as tramasSO CANopen est*ndar pueden utili/arse para:
'niciali(ar la descar)a de S*O
*escar)ar el se)mento de S*O.
'niciali(ar la subida de S*O. Subir el se)mento de S*O.
Cancelar la trans+erencia de S*O.
S*O upload e$pedited request.
S*O upload e$pedited response.
S*O upload se)mented request m"$. se)mento con datos tiles de / bytes0.
S*O upload se)mented response m"$. se)mento con datos tiles de / bytes0.
l controlador de motor C>>;%AS%'''%># es compatible con todos lostipos de trans+erencia indicados m*s arriba' ;uesto -ue cuando seutili/a la implementacin Co del C>>;%AS%''%># solo se puedenactivar ob3etos CANopen est*ndar cuyo tama2o est* limitado a #$
bits (& ytes),Qnicamentesoncompatibleslostiposdetrans+erenciasconunalongitudm*@imadedatosde asta #$ bits (& bytes0.
T/%"% PDOos ob3etos de datos de proceso (;O) sirven para e+ectuar latransmisin c0clica de datos de valores nominales y reales entremaster y slave' l master los debe con.gurar en el estado ;re%Operational antes de poner en +uncionamiento el slave' Acontinuacin se transmiten en tramas ;O' as tramas tienen laestructura siguiente:n Co, todos los datos de una trans+erencia de ;O se transmiten atrav4s de tramas ;O' as tramas tienen la estructura siguiente:
Grama ;O: estructura de los telegramas
Co"-on&nt& D&+(/i-(i3n;rocess ata Contenido de los datos del ;O (;rocess
ata Ob3ect);rocess ata(optional)
Contenido de datos opcionales de otros;O
;ara transmitir un ;O a trav4s del protocolo Co terCAG, los ;Ode transmisin y ;O de recepcin se deben asignar a un canal detransmisin del Sync >anager, adem*s de a la con.guracin de ;O(;O >apping) (cap0tulo &'!'1 Con.guracin de la inter+a/ decomunicacin)' l intercambio de datos de ;O para el controladorde motor C>>;%AS%'''%># tiene lugar e@clusivamente a trav4s del
protocolo de telegramas de datos de proceso terCAG'
7 ... n )8t&+ 7 ... n )8t&+;rocess ata ;rocess ataStandard CANopen ;O
Erameoptional

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 10/13
l controlador de motor C>>;%AS%'''%># no es compatible con latransmisin de los datos de proceso CANopen (;O) a trav4s de lacomunicacin a c0clica (protocolo de telegramas de correoelectrnico)';uesto -ue en el controlador de motor C>>;%AS%'''%># todos los datos
intercambiados a trav4s del protocolo Co terCAG se env0andirectamente a la implementacin CANopen interna, el ;O tambi4nse mapea de la manera descrita en ;O%>essage' n la .gurasiguiente se muestra el procedimiento:
T/%"% !& &"&/g&n(i%A trav4s de la trama de emergencia Co terCAG se intercambianmensa3es de error entre el master y el slave' as tramas deemergencia Co sirven para transmitir directamente los mergency>essages (mensa3es de emergencia) de.nidos en CANopen' ostelegramas CANopen se pasan por el t5nel de tramas de emergenciaCo, como en el caso de la transmisin de SO y ;O'
Jbytes $ bytes $ bytes 1bytes !bytes
1 ''' nbytes
>ailbo@6eader
Co6eader
rror Cod rrorDegiste
ata ata
>andatory 6eader Standard CANopen mergency
Erame
optional
mergency Erame: estructura de los telegramas'
Co"-on&nt& D&+(/i-(i3n>ailbo@ 6eader atos para la comunicacin de correo electrnico
(longitud, direccin y tipo)Co 6eader Identi.cador del servicio CorrorCode Error Code del EME12E!C Messa)e de CA!open
rror Degister rror Degister del >DNCR >essage de CANopen
ata Contenido de datos del >DNCR messageCANopenata (optional) Otros datos opcionales. Puesto que en la implementación CoE

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 11/13
para el controlador de motor CMMP-AS-...-M3 solo son
compatibles las tramas de emer)encia CA!open est"ndar, el
campo 4*ata optional05 no se utili(a.
ado -ue en este caso tambi4n tiene lugar una simple entrega alprotocolo CANopen implementado en el controlador del motor de losmergency >essages recibidos y enviados a trav4s de Co'
¿CUÁNTOS B9TES DE TRANSMISIÓN?
VELOCIDAD DEL MOTOR EN 7 BITS
Dango de % #$LJ8 a #$LJL ;adrn =alores;ropiedades: DOrupo de acceso v0a 6>I: NG
escripcin:;ermite monitorear la velocidad del motor' sta palabra utili/aresolucin de 1# bits con se2al para representar la rotacin sincrnicadel motor:
;"J81 """" (" decimal) velocidad del motor "
;"J81 $""" (819$ decimal) velocidad del motor rotacinsincrnica
=alores de velocidad intermediarios o superiores pueden serobtenidos utili/ando esta escala' ;or e3emplo, para un motor de &polos y 18"" rpm de rotacin sincrnica, caso el valor le0do sea $"&8("8""), para obtener el valor en rpm se debe calcular:
6elocidad en rpm 7 899 :&9/8 8;&
=elocidad en rpm &!"rpm
;ermite programar el valor de la velocidad m0nima y m*@ima para elconvertidor' Solamente valores positivos son aceptos, sin embargo losvalores programados tambi4n son v*lidos para el sentido de giro antiorario' os valores son escritos en rpm'
Pndice J"&J
8;& 7< 899 rpm
&9/8 7< 6elocidad en rpm
8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 12/13
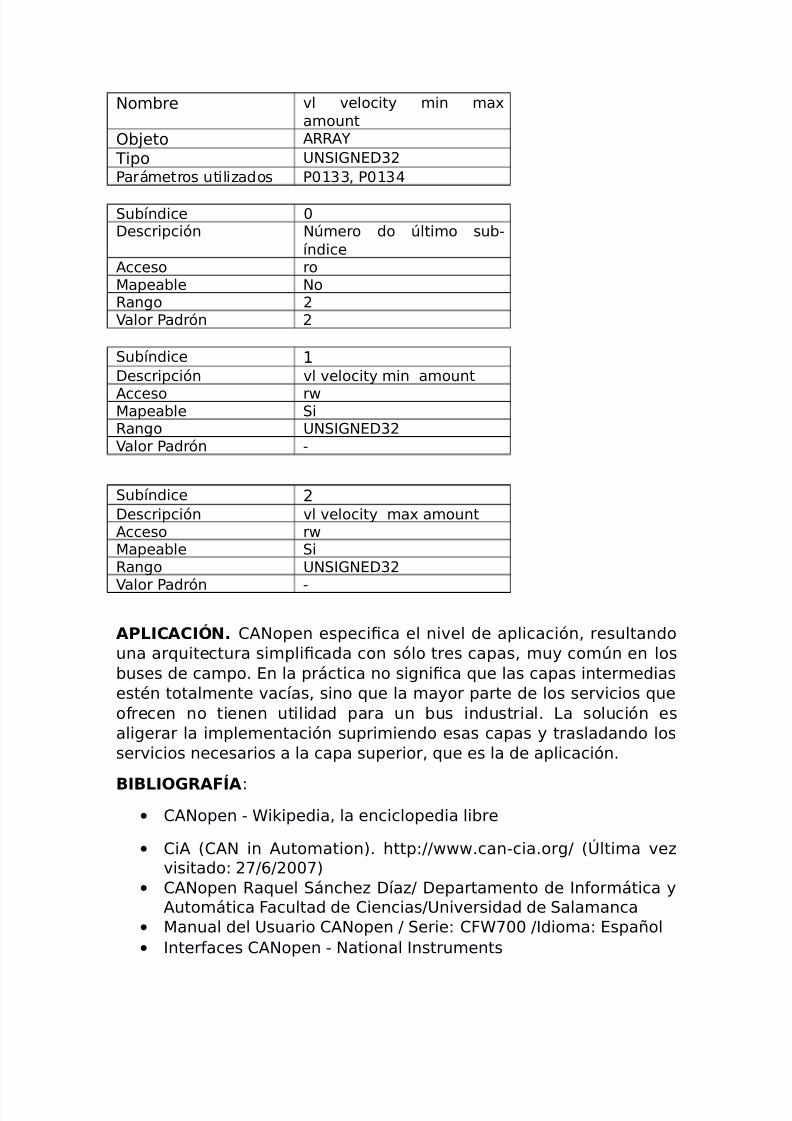
Nombre vl velocity min ma@amount
Ob3eto ADDAR Gipo 7NSIN#$;ar*metros utili/ados ;"1##, ;"1#&
Sub0ndice "escripcin N5mero do 5ltimo sub%
0ndiceAcceso ro>apeable NoDango $=alor ;adrn $
Sub0ndice 1escripcin vl velocity min amount
Acceso rT>apeable SiDango 7NSIN#$=alor ;adrn %
Sub0ndice $escripcin vl velocity ma@ amountAcceso rT>apeable SiDango 7NSIN#$
=alor ;adrn %
APLICACIÓN. CANopen especi.ca el nivel de aplicacin, resultandouna ar-uitectura simpli.cada con slo tres capas, muy com5n en losbuses de campo' n la pr*ctica no signi.ca -ue las capas intermediasest4n totalmente vac0as, sino -ue la mayor parte de los servicios -ueo+recen no tienen utilidad para un bus industrial' a solucin esaligerar la implementacin suprimiendo esas capas y trasladando losservicios necesarios a la capa superior, -ue es la de aplicacin'
BIBLIO,RA1ÍA:• CANopen % UiKipedia, la enciclopedia libre
• CiA (CAN in Automation)' ttp:??TTT'can%cia'org? (Qltima ve/visitado: $L?J?$""L)
• CANopen Da-uel S*nce/ 0a/? epartamento de In+orm*tica yAutom*tica Eacultad de Ciencias?7niversidad de Salamanca
• >anual del 7suario CANopen ? Serie: CEUL"" ?Idioma: spa2ol• Inter+aces CANopen % National Instruments

8/17/2019 PROTOCOLO CANOPEN
http://slidepdf.com/reader/full/protocolo-canopen 13/13





























