Embed Size (px)
Citation preview
PROPOSAL TUGAS AKHIR
RANCANG BANGUN PAPAN SCORE
Disusun oleh :
Pembimbing :Imam Abadi, ST, MT
NIP. 19761006 199903 1 002
PROGRAM STUDI D3 TEKNIK INSTRUMENTASIJURUSAN TEKNIK FISIKA
FAKULTAS TEKNOLOGI INDUSTRI INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA2013

LEMBAR PENGESAHAN
I a. Judul : Rancang Bangun Alat Pengukur Gaya (Force Measurement)
Berbasis Mikrokontroler ATMEL-ATMega8535
b. Disiplin Ilmu : Instrumentasi
II Peneliti Utama
a. Nama : Arif Rachmat Hermawan
b. NRP : 2410 030 034
c. Jenis Kelamin : Laki-Laki
d. Jurusan/Fakultas : D3 Teknik Instrumentasi/Teknologi Industri
e. Institusi : Institut Teknologi Sepuluh Nopember Surabaya
III Pembimbing : Imam Abadi, ST. MT
IV Lama Penelitian : 1 Semester
V Proposal ke : II
VI Status : Revisi
Surabaya, 22 Maret 2012
Menyetujui,Pembimbing
Imam Abadi, ST, MTNIP. 19761006 199903 1 002
Pelaksana Tugas Akhir
Arif Rachmat HermawanNRP. 2410 030 034
Mengetahui
Kepala Program StudiD3 Teknik Instrumentasi
Imam Abadi, ST, MTNIP. 19761006 199903 1 002
I. JudulRancang Bangun papan score
II. Latar BelakangPerkembangan dunia industri yang terus berkembang di berbagai bidang, tentunya hal ini juga mampu membuat kehidupan manusia menjadi lebih mudah. Sejalan dengan kemajuan industri yang sangat pesat, maka perkembangan akan listrik sebagai sumber energi dalam pelaksanaan industri dan perumahan juga semakin berkembang. Dalam perkembangan barang – barang elektronika sendiri sangat pesat, Beberapa factor pendukungnya tentu saja perkembangan alat – alat elektronika yang semakin beragam. Barang-barang elektronika tentunya mendukung dalam
kegiatan apa saja dalam bidang apapun. Khususnya dalam bidang olahraga, barang elektrinika yang berkembang disini adalah papan score untuk sebuah pertandinagn.
III. PermasalahanPermasalahan yang diangkat dalam Tugas Akhir ini yaitu bagaimana cara membangun
dan merancang sistem pengukur gaya yang memiliki akurasi tinggi.
IV. Batasan MasalahUntuk memfokuskan penyelesaian masalah pada penelitian tugas akhir ini maka batasan
masalah yang diangkat adalah sebagai berikut :1. Alat yang akan dirancang dan dibangun hanya memiliki fungsi untuk mengukur gaya
(force).2. Display atau Interface yang digunakan hanya sebatas tampilan pada LCD3. Supplay daya bisa menggunakan power supply maupun baterai 9 Volt
V. Tujuan Tugas AkhirTujuan tugas akhir kali ini yaitu agar dapat membangun sistem dan mengetahui cara
kerja sistem pengukuran gaya serta mengidentifikasi karakteristik static dan dinamik sistem.
VI. Tinjauan PustakaUntuk menunjang pelaksanaan Tugas Akhir ini telah dilakukan tinjauan pustaka
sehingga dapat menjadi rumusan permasalahan. Sumber wacana tersebut adalah sampai saat ini masih belum ada laboratorium di jurusan Teknik Fisika yang memiliki alat pengukur gaya digital untuk mempermudah aktifitas praktikum maupun pengerjaan project tugas akhir.
VII.Teori PenunjangBerbagai macam sensor saat ini telah banyak berkembang, seiring dengan
perkembangannya sensor menjadi suatu komponen penting dalam bidang elektronika. namun tidak hanya bidang elektonika, sensor juga berkembang di bidang lainnya sesuai dengan kebutuhan dan keinginan masyarakat. Salah satu sensor yang sedang berkembang saat ini adalah sensor gaya, dan lebih spesifiknya adalah force sensitive resistor. Prinsip kerja dari sensor ini tentu sesuai dengan namanya, yaitu untuk deteksi adanya gaya yang ditimbulkan oleh suatu rangsangan yang masuk dalam suatu alat. Gaya itu sendiri menyebabkan terjadinya tegangan yang nantinya akan menimbulkan suatu sinyal tertentu. Berikut adalah grafik terjadinya sinyal karena gaya tertentu :
Gaya atau Beban
Stress Strain Perubahan Resistansi
Sinyal

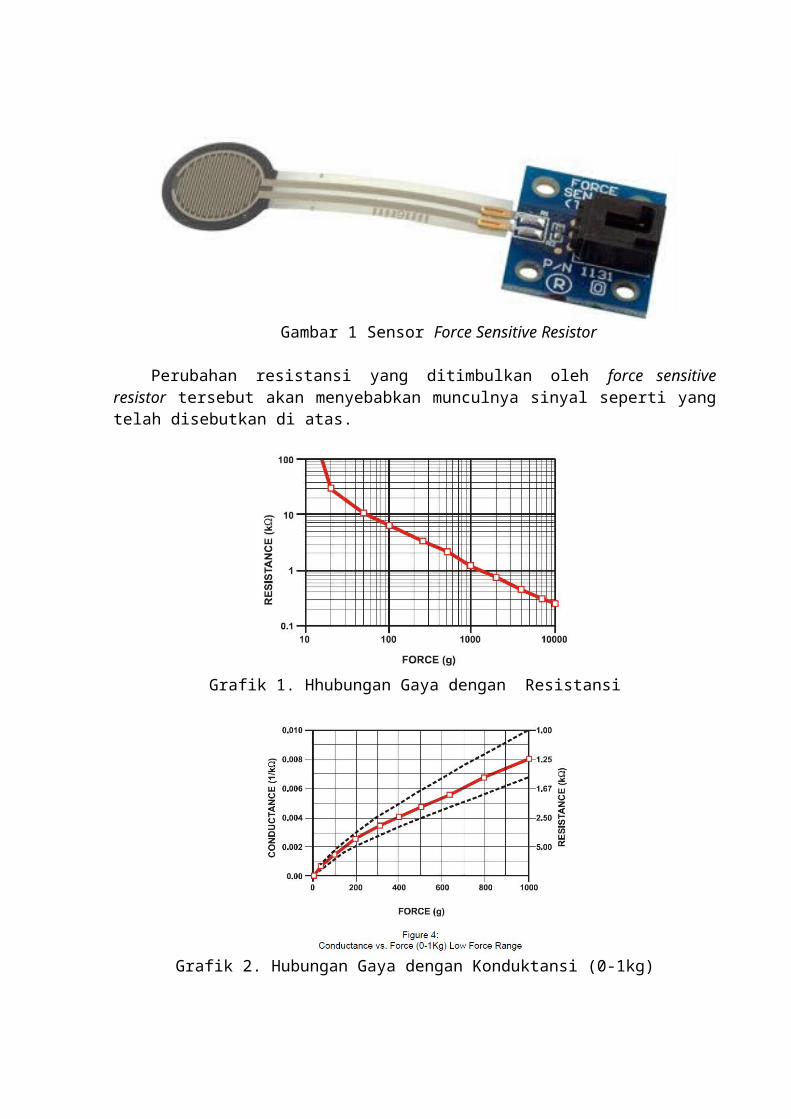
Sensor gaya (Force Sensitive Resistor)Sensor force sensitive resistor merupakan sensor gaya berbentuk printed circuit yang
sangat tipis dan fleksibel. Sensor ini sangat mudah diimplementasikan untuk mengukur gaya tekan antara 2 permukaan dalam berbagai aplikasi. Sensor ini bersifat resistif dan nilai konduktansinya berbanding lurus dengan gaya/beban yang diterimanya. Semakin besar beban yang diterima sensor force sensitive resistor maka nilai hambatan output-nya akan semakin menurun. Pada keadaan tanpa beban, resistansi sensor ini sebesar kurang lebih 10M ohm. Ketika diberi beban maksimum, resistansi sensor akan turun hingga kurang lebih 10K ohm. Salah satu sifat dari force sensitive resistor adalah nilai resistansinya (perubahan resistansi) sebanding dengan perubahan strain dengan rumus sebagai berikut :
dRR
=F . ε0 (F adalah Gauge Factor)
Gambar 1 Sensor Force Sensitive Resistor
Perubahan resistansi yang ditimbulkan oleh force sensitive resistor tersebut akan menyebabkan munculnya sinyal seperti yang telah disebutkan di atas.
Grafik 1. Hhubungan Gaya dengan Resistansi

Grafik 2. Hubungan Gaya dengan Konduktansi (0-1kg)
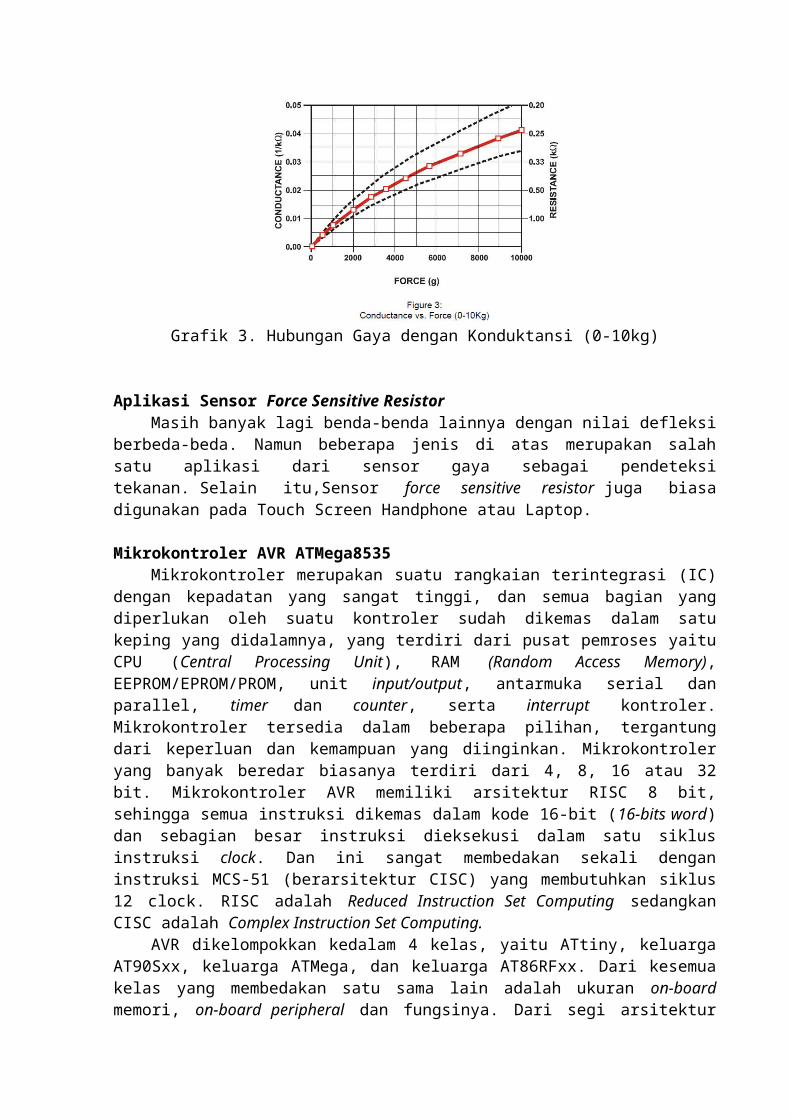
Grafik 3. Hubungan Gaya dengan Konduktansi (0-10kg)
Aplikasi Sensor Force Sensitive ResistorMasih banyak lagi benda-benda lainnya dengan nilai defleksi berbeda-beda. Namun
beberapa jenis di atas merupakan salah satu aplikasi dari sensor gaya sebagai pendeteksi tekanan. Selain itu,Sensor force sensitive resistor juga biasa digunakan pada Touch Screen Handphone atau Laptop.
Mikrokontroler AVR ATMega8535Mikrokontroler merupakan suatu rangkaian terintegrasi (IC) dengan kepadatan yang
sangat tinggi, dan semua bagian yang diperlukan oleh suatu kontroler sudah dikemas dalam satu keping yang didalamnya, yang terdiri dari pusat pemroses yaitu CPU (Central Processing Unit), RAM (Random Access Memory), EEPROM/EPROM/PROM, unit input/output, antarmuka serial dan parallel, timer dan counter, serta interrupt kontroler. Mikrokontroler tersedia dalam beberapa pilihan, tergantung dari keperluan dan kemampuan yang diinginkan. Mikrokontroler yang banyak beredar biasanya terdiri dari 4, 8, 16 atau 32 bit. Mikrokontroler AVR memiliki arsitektur RISC 8 bit, sehingga semua instruksi dikemas dalam kode 16-bit (16-bits word) dan sebagian besar instruksi dieksekusi dalam satu siklus instruksi clock. Dan ini sangat membedakan sekali dengan instruksi MCS-51 (berarsitektur CISC) yang membutuhkan siklus 12 clock. RISC adalah Reduced Instruction Set Computing sedangkan CISC adalah Complex Instruction Set Computing.
AVR dikelompokkan kedalam 4 kelas, yaitu ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT86RFxx. Dari kesemua kelas yang membedakan satu sama lain

adalah ukuran on-board memori, on-board peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan mereka bisa dikatakan hampir sama. Berikut adalah arsitektur dari mikrokontroler ATMega8535 :
Saluran IO sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D ADC 10 bit sebanyak 8 Channel Tiga buah timer / counter 32 register Watchdog Timer dengan oscilator internal SRAM sebanyak 512 byte Memori Flash sebesar 8 kb Sumber Interrupt internal dan eksternal Port SPI (Serial Pheriperal Interface) EEPROM on board sebanyak 512 byte Komparator analog Port USART (Universal Shynchronous Ashynchronous Receiver Transmitter)
Mikrokontroler ATMega8535 memiliki 40 pin dengan susunan seperti pada gambar 4 di bawah ini :
Gambar 2. Konfigurasi Pin IC ATMega 8535[4]
Dari gambar 2 terdapat konfigurasi dan fungsi pin Mikrokontroler AVR ATMega 8535, yaitu sebagai berikut;
VCC merupakan pin yang berfungsi sebagai pin masukan catudaya GND merupakan pin ground Port A (PA0...PA7) merupakan pin I/O dan pin masukan ADC. Port B (PB0...PB7) merupakan pin I/O dan pin yang mempunyai fungsi khusus yaitu
timer/counter, komparator analog dan SPI. Port C (PC0...PC7) merupakan port I/O dan pin yang mempunyai fungsi khusus, yaitu
komparator analog dan timer oscillator. Port D (PD0...PD1) merupakan port I/O dan pin fungsi khusus yaitu komparator
analog dan interrupt eksternal serta komunikasi serial. RESET merupakan pin yang digunakan untuk mereset mikrokontroler. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal. AVCC merupakan pin masukan untuk tegangan ADC. AREF merupakan pin masukan tegangan referensi untuk ADC.
Layar LCD (Liquid Crystal Display)Layar LCD merupakan media yang digunakan untuk menampilkan data. Agar sebuah
tulisan atau gambar dapat tampil pada layar LCD, maka diperlukan sebuah rangkaian pengatur scanning dan pembangkit tegangan sinus.
Gambar 3. Layar LCD
LCD terdiri dari Liquid yang akan mengatur kristal agar mempolarisasikan cahaya, sehingga cahaya matahari (putih) akan dibiaskan menjadi warna tertentu. Bahan kristal yang digunakan adalah Pasive matrix, indium-tin oxide, Active matrix. Pada LCD terdapat downloader yang akan disambungkan ke mikrokontroler.
Desain Rancang Bangun Mesin KompaksiAlat ukur gaya (force) yang akan dibuat kurang lebih system kerjanya adalah seperti
gambar dibawah ini dengan memanfaatkan gaya dari tekanan kompresor..
Gambar 4. Rancang Bangun Force MeasurementBerikut ini keterangan dari setiap komponen yang ada pada desain diatas:
a. Sensor FSRb. Luas logam penekanc. Penyangga dan penopangd. Tempat bahan uji (sampel)
Diagram blok sistem pengukuran gaya (force) berbasis Mikrokontroler ATMega 8535 adalah sebagai berikut
Input Output
Rangkaian Pemrosesan
Sinyal Mikrokontroller
8535
Rangkaian Pengkondisian
Sinyal (Op Amp)
DisplayLCD
SensorFSR
Gambar 5. Diagram Blok Sistem
Sistem Instrumen PengukuranSistem pengukuran merupakan bagian pertama dalam suatu sistem pengendalian, Jika
input sistem pengendalian salah, maka output salah, Jika hasil pengukuran (input sistem pengendalian) salah, maka hasil pengendalian pasti salah, walaupun sebenarnya sistem pengendalian sangat baik1. Karakteristik Statis : karakter yang menggambarkan parameter instrument dalam keadaan
steadyAkurasi : Ketepatan alat ukur dalam memberikan hasil pengukuranPresisi : Kemampuan sistem pengukuran untuk menampilkan ulang output yang
sama pada pengukuran berulang singkatToleransi : Menunjukkan kesalahan maksimumRange (span) : Selisih nilai maksimum dan minimum yang dapat diukur oleh alatSensitifitas : Perubahan output instrumen yang terjadi ketika kualitas pengukuran berubahLinieritas : Pengukuran yang baik adalah jika input pengu-kuran (nilai sesungguhnya)
memberikan output (nilai yang ditunjukkan alat ukur) yang sebanding lurusHysterisis : Perbedaan (kesalahan) ini disebut hyterisis
2. Karakteristik Dinamis : karakter yang menggambarkan respon (tanggapan) dinamik (fungsi waktu), Hubungan input (nilai sesungguhnya) dan output (nilai yang ditunjukkan alat ukur) sebagai fungsi waktu dapat dinyatakan dengan persamaan.
y → Variabel output deviasif → Variabel input deviasiVariabel deviasi = selisih nilai sesungguhnya dengan nilai keadaan steady
VIII. METODOLOGI PENELITIANMetodologi penelitian yang dilakukan dalam pengerjaan tugas akhir ini adalah sebagai
berikut :

Gambar 6. Metodologi Penelitian
Ya
Tidak
TidakYa
Uji
Perancangan hardware
Studi Literatur
Mulai
Uji
Pengintegrasian Sistem
Selesai
Pembuatan Bahan Uji, Analisa hasil & Kesimpulan

IX. JADWAL KEGIATAN Kegiatan penelitian ini akan dilaksanakan dengan jadwal sebagai berikut :
Tabel 1. Tabel KegiatanNo Kegiatan Februari Maret April Mei Juni1 Studi Literatur2 Perancangan Hardware3 Pengintegrasian Sistem4 Pembuatan Bahan Yang akan
dianalisa5 Analisa Hasil dan Kesimpulan6 Penyusunan Laporan
X. DAFTAR PUSTAKA1. Eko Putra, Agfianto. 2002. “Belajar Mikrokontroler ATMega8535” Jakarta : Gaya
Media.2. Malvino, A. P. 1994. ”Prinsip-prinsip elektronika,” Jakarta : Erlangga.3. Sumbodo, Wirawan. 2004. Pneumatik / Hydrolic. Semarang : Teknik Mesin UNNES.4. http://www.hukum_pascal.html, diakses pada tanggal 9 Desember 2012 5. http://www.sistem_hidraulik.html, diakses pada tanggal 9 Desember 20126. Aryoseto, Jarot. 2004. “Pembuatan Alat Peraga Sistem Hidraulik”. Jakarta : Gaya
Media.

HASIL PROPOSAL TUGAS AKHIR
Proposal ini harus ditanda tangani oleh mahasiswa yang bersangkutan dan pembimbingnya dengan format sebagai berikut:
Proposal ini : *)a. Ditolakb. Diterimac. Diterima dengan revisi
(proposal ini harus dilampirkan pada proposal hasil revisi)
Surabaya, 22 Maret 2012
Dosen Pembimbing
Imam Abadi, ST, MTNIP. 19761006 199903 1 002
Pelaksana Tugas Akhir
Arif Rachmat HermawanNRP. 2410 030 034
* Lingkari yang dipilih





