Embed Size (px)
Citation preview

Properties of NCGPC applied to
nonlinear SISO systems
with a relative degree one or two
EA 4353
with a relative degree one or two
M. DABO, N. LANGLOIS & H. CHAFOUK
GT Commande Prédictive Non Linéaire
ENSAM, Paris
13 janvier 2011

Relative degree of nonlinear SISO systems
Outline
Unconstrained NCGPC
Case of relative degree equal to 1
PropertiesProperties
Example
Case of relative degree equal to 2
Properties
Example
Conclusion and future work

1. Relative degree of NL systems
Definition [Isidori 1995]:
=+=
))(()(
)())(())(()(
txhty
tutxgtxftx&
System considered:
(1)
The relative degree ρ of (1) is said to be well-defined if (1) has the relative degree ρ at all points in an operating set [Chen 2001]
The nonlinear SISO system (1) is said to have a relative degreeρ around x0 if:
(i) for all x in a neighbourhood of x0 and allk < ρ-1,
(ii)
∑= ∂
∂=n
ii
if xfx
x
hxhL
1
)()()(
0)( =xhLL kfg
0)( 01 ≠− xhLL fgρ
where

2. Unconstrained NCGPC
[ ]∫ +=T
dteJ0
2)(ˆ2
1 ττ )(ˆ)(ˆ)(ˆ τωττ +−+=+ ttyte
Criteria to minimize:
where
The control law can be derived under the assumptions [Chen 2003]:
1: zero dynamics exist and are asymptotically stable;
2: all states are accessible for measurements;
3: the system has a well-defined relative degree;
4: the output and the reference are sufficiently many times continuously differentiable with respect totime;

2. Unconstrained NCGPC
∑=
+=+ρ
ρτττ0
)( )(!
)()(ˆk
kk R
ktyty
Taylor’s series expansion:
==
))(()(
))(()(
txhLty
txhty
&
≈+
)(
)(
)(
!1)(ˆ
)( ty
ty
ty
ty
ρ
ρ
ρτττ
M
&L
+=
=
− ))(())(())(()(
))(()(
1)( txutxhLLtxLty
txhLty
fghf
f
ρρρM
&where
In a similar way:
≈+
)(
)(
)(
!1)(
)( t
t
t
t
ρ
ρ
ω
ωω
ρτττω
M
&L
)

2. Unconstrained NCGPC
≈+
)(
)(
)(
!1)(ˆ
)( ty
ty
ty
ty
ρ
ρ
ρτττ
M
&L
Taylor’s series expansion:
)(
)(
ty
ty
&
=Λ
!1)(
ρτττ
ρL
≈+
)(
)(
)(
!1)(
)( t
t
t
t
ρ
ρ
ω
ωω
ρτττω
M
&L
)
=
)(
)()(
)( ty
tytY
ρM
&
=Ω
)(
)(
)(
)(
)( t
t
t
t
ρω
ωω
M
&

2. Unconstrained NCGPC
From
Criteria to minimize:
)()()( ttYtE Ω−= )()()(ˆ tEte ττ Λ=+
[ ]∫ +=T
dteJ0
2)(ˆ2
1 ττ )()()()(2
1
0
tEdtEJT
tt
ΛΛ= ∫ τττ
02 2
0
where Π(T, ρ) is of dimensions (ρ+ 1)×( ρ+ 1)
Let the prediction matrix ∫ ΛΛ=ΠT
t dT0
)()(),( τττρ
0)(),()(
)( =Π
∂∂
tETtu
tEt
ρ
Criteria minimization:

2. Unconstrained NCGPC
Criteria minimization:
−
−−
=
)()(
)()(
)()(
)()( tty
tty
tty
E
ρρ ω
ωω
M
&&
+
−
−−
=−
×
hLuLhL
hL
h
E
fgf
f
11
)(
0ρ
ρ
ρρ ω
ωω
M
&
))(())(( 1 txhLLtxD −= ρLet
[ ]))((0)(
)( 11 txhLL
tu
tEfg
t−
×=
∂∂ ρ
ρ
))(())(( 1 txhLLtxD fg−= ρLet
[ ] 0),(0)(
1 =
+−
−Π×
DuhL
h
TD
fρρ
ρ
ω
ωρ M0)(),(
)(
)( =Π
∂∂
tETtu
tEt
ρ
0)(
=
+−
−Π
DuhL
h
D
f
sρρ ω
ωM where Πs (dimensions 1× (ρ + 1)) is the last row of Π(T,ρ)

2. Unconstrained NCGPC
D cannot vanish for all x ∈ X : see (ii)The relative degree is supposed well-defined
Criteria minimization:
0)(
=
+−
−Π
DuhL
h
D
f
sρρ ω
ωM
−
−Π=
Π ×
hL
h
Duf
ssρρ
ρ
ω
ω
)(
10M
where Πss(dimensions 1×1) is the last element of vector Πs
−
−Π=Π
hL
h
Du
f
sssρρω
ω
)(
M

2. Unconstrained NCGPC
++ 12!12! ρρρρ
−
−ΠΠ= −−
hL
h
Du
f
sssρρω
ω
)(
11M
Resulting control law [Dabo 2009]:
−
−Π=Π
hL
h
Du
f
sssρρω
ω
)(
M
Let −
+++
++= − 1
)1()!(
12!
1
12!),(
1KK
llTTTK
ρρρ
ρρρρ ρρ
[ ]))((
)())((
))((1
0
)(
txhLL
ttxhLK
txufg
l
llfl
−=∑ −−
= ρ
ρ
ρ ω
Let sssTK ΠΠ= −1),( ρ
1)1(
12
!
!−++
+= ρρ ρρρ
TllK lwhere is the (l+1)th element of K(T, ρ)

2. Unconstrained NCGPC
−
−−
=
=
−− )1()1(
2
1
ρρρ ω
ωω
y
y
y
z
z
z
ZM
&&
M
Change of coordinates:
+−=
==
− hLuLhLz
zz
zz
fgf1)(
32
21
ρρρρ ω&
M
&
&
==
CZO
AZZ&
−−−−
=
− )1(210
1000
0000
0100
0010
ρρρρρ KKKK
A
L
L
MOMMM
L
L
L
1)1(
12
!
!−++
+= ρρ ρρρ
TllK l
with
Resulting linear (and controllable) system:
where
0)( 10 =+++= ρρρρ λλλ LKKPCharacteristic polynomial:

3. Case of relative degree ρ = 1
λλ += 101 )( KP
Characteristic polynomial:
p
GpH
θ+=
1)( 1
1
Corresponding system:
1
Parameter identification:
The application of NCGPC to SISO nonlinear system of dimension 1 equal to its relativedegree, leads, in the right space of coordinates, to a linear 1st-order system with transferfunction H1 defined by a time constant θ and a static gain G1 equal to the referencesignal ω1(t).
Theorem 1:
32T=θ
=
=
1
1
11
10
K
Kθ 1
12!10 +
+=ρρρ
ρTKand

3. Case of relative degree ρ = 1: some properties
Closed-loop system stability:
Predictionhorizon time
Time constant 32T=θ
T
Characteristic parameters/times:
Settling time at 5%
Cut-off frequency
Tc 23=ω
Tt 2%5 ≈
Pole T23−=λ

3. Case of relative degree ρ = 1: example
=+=
)()(
)()(3)( 2
txty
tutxtx&
System considered:
System analysis:
system dimension = 1
Prediction timeT (s)
K1= [K10 K11]
1 [1.5 1]
2 [0.75 1]
3 [0.5 1]
Parameter values vs. T:
system dimension = 1
relative degree = 1
No zero dynamics
3 [0.5 1]
4 [0.375 1]
5 [0.3 1]
Control law:
[ ]))((
)())(()1,(
))((0
1
0
)(1
txhLL
ttxhLTK
txufg
l
llfl∑
=
−−=
ω
Desired output:
step
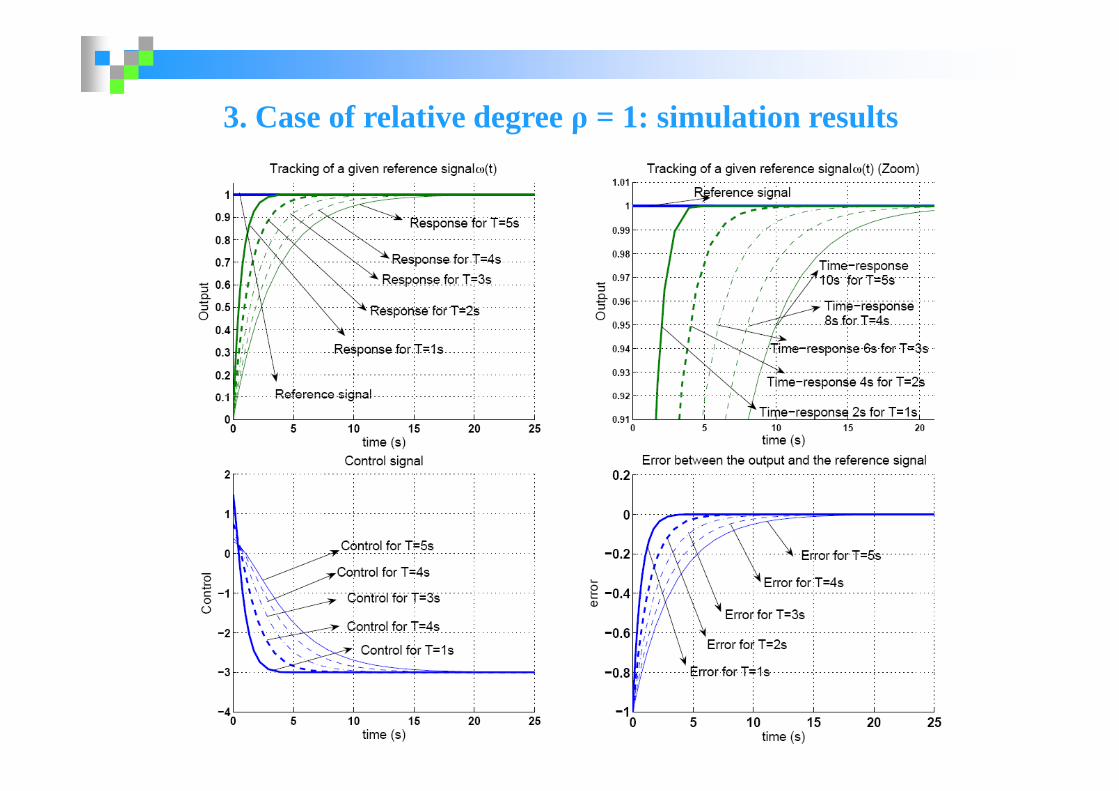
3. Case of relative degree ρ = 1: simulation results

4. Case of relative degree ρ = 2
221202 )( λλλ ++= KKP
Characteristic polynomial:
222
22
)(nn pp
GpH
ωξω ++=
Corresponding system:
1
12!
++=
ρρρω ρT
n = 220K nω
Parameters identification:
T83.1≈ω =+ ωρρ 12! 2
1+=
ρω ρT
n
( )( )( )22 2
121!
2
1),(
+++= − ρ
ρρρρξ ρTT
===
1
2
22
21
20
K
K
K
n
n
ξωω
Theorem 2:
The application of NCGPC to SISO nonlinear system of dimension 2 equal to its relative
degree, leads, in the right space of coordinates, to a 2nd-order linear transfer function with
a constant damping ratio and a natural frequency .685.0≈ξ Tn 83.1≈ω
Tn 83.1≈ω
685.0≈ξ
=++
=++
− n
n
T
T
ξωρρρ
ωρρρ
ρ
ρ
22
12!1
12!
1
2

4. Case of relative degree ρ = 2: some properties
Characteristic parameters/times:
Predictionhorizon time
Rise time
Time-to-peak
Ttr 47.1≈
T
Ttp 34.2≈
Closed-loop system stability:
Time-to-peak
Resonant frequency Tr 46.0≈ω
Tt 39.2%5 ≈Settling time at 5%
Poles )33.125.1(12,1 j
T±−=λ
Ttp 34.2≈
Percent overshoot 21.5≈PO
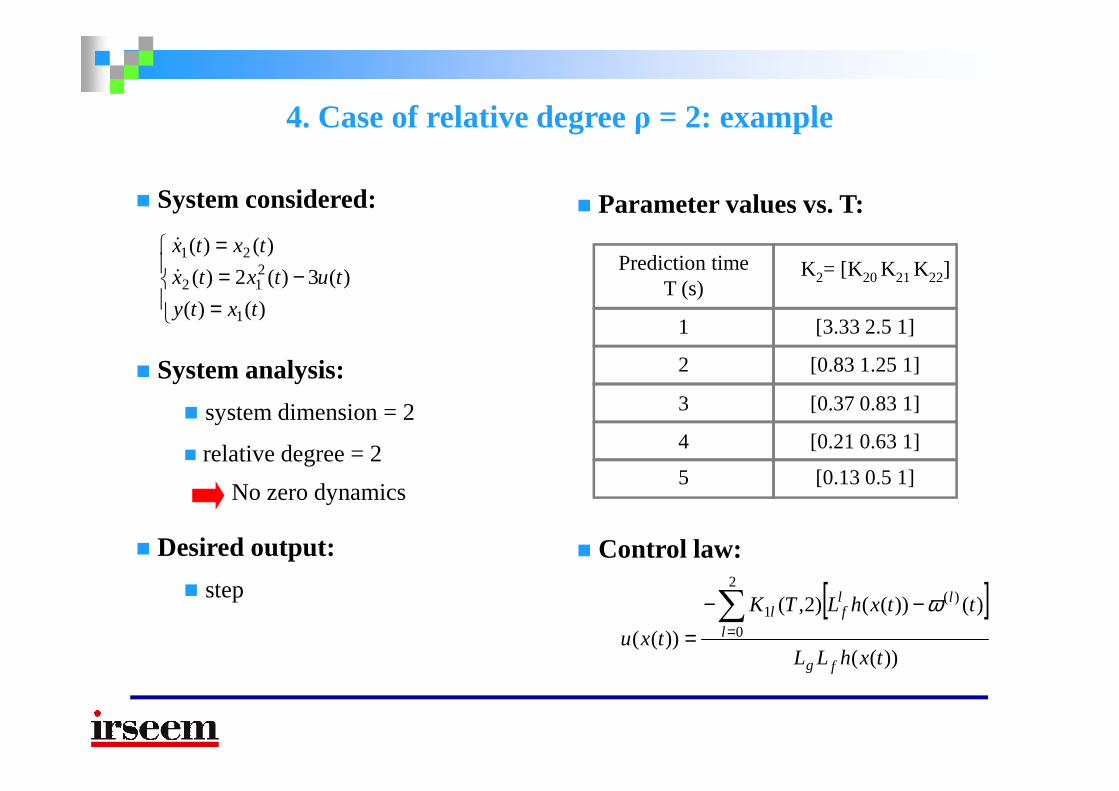
4. Case of relative degree ρ = 2: example
=−=
=
)()(
)(3)(2)(
)()(
1
212
21
txty
tutxtx
txtx
&
&
System considered:
Prediction timeT (s)
K2= [K20 K21 K22]
1 [3.33 2.5 1]
2 [0.83 1.25 1]
3 [0.37 0.831]
Parameter values vs. T:
System analysis:3 [0.37 0.831]
4 [0.21 0.63 1]
5 [0.13 0.5 1]
Control law:
[ ]))((
)())(()2,(
))((
2
0
)(1
txhLL
ttxhLTK
txufg
l
llfl∑
=
−−=
ω
system dimension = 2
relative degree = 2
No zero dynamics
Desired output:
step

4. Case of relative degree ρ = 2: simulation results

Conclusion and future work
Properties of NCGPC when applied to NL SISO systems with:
Relative degree equal to 1: stability, speed & accuracy (step)
Relative degree equal to 2: stability, speed & accuracy (step)
Criteria based on error and control signal
Robustness
Nonlinear Discrete-time GPC
Constraints on actuators
Fault tolerant NDGPC
Thank you for Thank you for your attention!your attention!your attention!your attention!

Appendix 1. Case of 1st-order system: some properties

Appendix 2. Case of 2nd-order system: some properties