-
Progetto di controllori
per manipolatori industriali
Basilio Bona
Dipartimento di Automatica e InformaticaPolitecnico di
Torino
ultima revisione: 11 febbraio 2008
-
Indice
1 Progetto del controllore 31.1 Introduzione . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . 31.2 Specifiche di
Progetto . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
1.2.1 Stabilità nominale . . . . . . . . . . . . . . . . . . .
. . . . . . 111.2.2 Stabilità robusta . . . . . . . . . . . . . .
. . . . . . . . . . . . 131.2.3 Precisione statica . . . . . . . .
. . . . . . . . . . . . . . . . . . 131.2.4 Precisione dinamica . .
. . . . . . . . . . . . . . . . . . . . . . 141.2.5 Attenuazione
dell’effetto del disturbo d . . . . . . . . . . . . . 151.2.6
Attenuazione dell’effetto del rumore n . . . . . . . . . . . . . .
151.2.7 Moderazione dell’attività del comando . . . . . . . . . .
. . . . 151.2.8 Realizzabilità del controllore . . . . . . . . . .
. . . . . . . . . 17
2 Reti di compensazione 182.1 Rete derivativa . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . 18
2.1.1 Caratteristiche complessive . . . . . . . . . . . . . . .
. . . . . 192.2 Rete integrativa . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . 20
2.2.1 Caratteristiche . . . . . . . . . . . . . . . . . . . . .
. . . . . . 212.3 Compensatori PID . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . 22
2.3.1 Compensatore PD . . . . . . . . . . . . . . . . . . . . .
. . . . 252.3.2 Compensatore PI . . . . . . . . . . . . . . . . . .
. . . . . . . . 25
2.4 Controllo in feedforward . . . . . . . . . . . . . . . . . .
. . . . . . . . 25
A Sistemi del second’ordine 27A.1 Parametri della risposta nel
tempo . . . . . . . . . . . . . . . . . . . . 27A.2 Parametri della
risposta in frequenza . . . . . . . . . . . . . . . . . . . 29
B Controllo digitale 31B.1 Introduzione . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . 31
B.1.1 Notazioni . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . 32B.1.2 Campionamento e frequenza di Nyquist . . . . .
. . . . . . . . 34
B.2 Sintesi del controllore digitale . . . . . . . . . . . . . .
. . . . . . . . . 36B.2.1 Scelta del periodo di campionamento . . .
. . . . . . . . . . . . 36B.2.2 Determinazione della fdt del
controllore . . . . . . . . . . . . . 37B.2.3 Discretizzazione del
controllore continuo . . . . . . . . . . . . . 37B.2.4 Sintesi
diretta del controllore digitale . . . . . . . . . . . . . . .
42B.2.5 Periodo di campionamento e lunghezza della parola . . . . .
. . 43
1
-
B.2.6 Come ottenere l’algoritmo di controllo . . . . . . . . . .
. . . . 44
2
-
Capitolo 1
Progetto del controllore
1.1 Introduzione
Queste brevi note non hanno l’ambizione di sostituirsi a testi
di controlli automaticiben più completi, tra i quali indichiamo
all’attenzione del lettore i classici [1, 2] o ilpiù recente [3]
per sistemi continui e [4, 5] per sistemi a dati campionati.
Esse hanno invece lo scopo di riassumere le principali
problematiche che devonoessere considerate nel progetto dei
compensatori, non solo per robot industriali, maanche per altri
apparati meccatronici complessi.
Nell’ambito più specifico della robotica, per “controllori
semplici” si intendonocomunemente quelli
a) basati su una architettura di controllo a giunti
indipendenti, dove ogni singolomotore è controllato da un proprio
controllore, che usa solo le misure “locali”di posizione e
velocità angolare;
b) in cui il controllore è progettato usando le tecniche
classiche sviluppate nei corsidi base di Controlli Automatici.
In particolare, il progetto del controllo utilizza un modello
lineare semplificatodell’impianto considerato, che nel caso di un
robot include il braccio i-esimo, il motoreche lo aziona e
l’eventuale motoriduttore.
Nel seguito, sono dati per noti i concetti di trasformate di
Laplace e Zeta, schemia blocchi, funzioni di trasferimento di un
sistema lineare tempo-invariante, modalitàdi costruzione e
interpretazione dei diagrammi di Bode e Nyquist, significato dei
polie degli zeri per un sistema dinamico lineare
tempo-invariante.
Richiamiamo ora rapidamente alcuni concetti fondamentali, legati
alla rappresen-tazione, mediante schemi a blocchi, delle principali
componenti che entrano in unprogetto di controllo,
In Figura 1.1 viene schematizzato l’impianto considerato e il
suo controllore, me-diante la simbologia degli schemi a blocchi,
dove i blocchi con doppia cornice rappre-sentano modelli nonlineari
di impianti o apparati. I segnali rappresentano grandezzescalari o
vettoriali definite nel tempo.
Nella Figura 1.1 si possono riconoscere i seguenti blocchi:
3
-
impianto – sarebbe opportuno chiamare impianto l’apparato fisico
che dovrà essereeffettivamente controllato e usare il termine
modello (dell’impianto) per la rap-presentazione matematica dello
stesso; tuttavia, per semplicità, qui indichiamocon “impianto” il
blocco che rappresenta il modello nonlineare dell’apparato chesi
desidera controllare. In questo caso, come detto sopra, esso
include il motore,l’eventuale motoriduttore e il braccio
i-esimo;
trasduttore – rappresenta il modello nonlineare dell’apparato
che elabora e trasfor-ma in segnali misurabili (le uscite) le
grandezze fisiche (generalmente elettriche)necessarie per il
controllo. Il trasduttore posto in serie alla variabile di
riferimen-to w′ segnala la possibilità che anche il riferimento (o
ingresso di riferimento)sia una variabile che occorre trasformare
per essere utilizzabile dal controllo;
controllore – indica l’apparato fisico (nel caso di controllo
analogico) o l’algoritmo(nel caso di controllo digitale) che
trasforma l’errore η in segnale di comando u;
attuatore – indica l’apparato o l’azionamento che trasforma il
segnale di controllou di solito a bassa potenza, uscente dal
controllore, nel segnale di comando m,di solito a potenza più
elevata, che va ad effettivamente ad agire sull’impianto.
+
–
Attuatore Impianto
Trasduttore
Regolatore
(Controllore)Trasduttore
w′u0c η m y
d′Ad′
n′
c
+
–
Attuatore Impianto
Trasduttore
Regolatore
(Controllore)Trasduttore
w′u0c η m y
d′Ad′
n′
c
Figura 1.1: Generico schema a blocchi del controllo di un
impianto con elementi nonlineari.
È importante sottolineare che normalmente i livelli di potenza
dei segnali in giocosono diversi: il riferimento c0, la misura c,
l’errore η e il comando u hanno livelli dipotenza relativamente
bassi, mentre il segnale m uscente dall’attuatore ha livelli
chepossono essere anche considerevolmente più elevati.
Nello schema a blocchi sono indicati altri segnali esogeni, che
influiscono sull’im-pianto, sull’attuatore e sul trasduttore, e
vengono indicati rispettivamente con d′, d′Ae n′.
Si tratta di segnali che possono avere due significati
alternativi:
a) rappresentano variabili esogene deterministiche su cui il
progettista del controllonon ha possibilità di influire (ad
esempio, le coppie di carico a valle dei motori),
4
-
ma che determinato la “qualità” dell’uscita; in questo caso si
è soliti chiamarlidisturbi ;
b) rappresentano segnali di natura non deterministica, (ad
esempio i segnali paras-siti dovuti all’accoppiamento
elettromagnetico su cavi o canali di trasmissione);in questo caso,
anche se spesso vengono indicati anch’essi come disturbi,
sipreferisce chiamarli rumori.
Riportiamo, per chiarezza, l’elenco delle grandezze indicate
nella Figura 1.1:
Variabile Significatow′ variabile desiderata, riferimento,
ingressoc0 misura di w′
c misura di yη errore di misurau variabile di controllo,
comandom variabile manipolabiley variabile controllata, uscitad′A
variabile esogena di disturbo sull’attuatored′ variabile esogena di
disturbo sull’impianton′ variabile esogena di disturbo sul
trasduttore
Nella Figura 1.2 è stato rappresentato lo schema a blocchi
dell’impianto di Figura1.1, dopo che i vari elementi sono stati
linearizzati nell’intorno di un punto di funzio-namento nominale. I
disturbi e i rumori si sommano ai segnali che provengono
dalcontrollo o dai trasduttori e per questo motivo prendono il nome
di disturbi/erroriadditivi.
+
–
Attuatore Impianto
Trasduttore
Regolatore
(Controllore)Trasduttore
wδ ′0cδ δη mδ yδ
dδ ′
Adδ ′
nδ ′
cδ
+
+
uδ +
+ +
+
( )G s′
( )H s
( )A s( )R s′0( )T s
( )T s
Figura 1.2: Generico schema a blocchi di un controllo di un
impianto con elementilinearizzati.
Si può notare che nella Figura 1.1 i segnali sono da intendersi
definiti nel tempo,mentre in Figura 1.2, si usano invece le
trasformate di Laplace degli stessi e nei
5
-
blocchi compaiono funzioni della variabile complessa s = σ + jω,
dette funzioni ditrasferimento o fdt. Ciò è possibile in quanto
si è proceduto alla linearizzazionedell’impianto e, di
conseguenza, ogni blocco si può ora rappresentare come un
sistemadinamico lineare tempo-invariante, espresso in variabili di
stato, le cui funzioni ditrasferimento sono generiche funzioni
razionali fratte, indicate nella Figura 1.2.
Riportiamo di seguito l’elenco delle funzioni di trasferimento
indicate nella Figura1.2:
Fdt SignificatoT 0(s) fdt del trasduttore sul riferimentoR′(s)
fdt del regolatore o controlloreA(s) fdt dell’attuatoreG′(s) fdt
dell’impianto linearizzatoH(s) fdt tra disturbo e uscita, descrive
dinamica del segnale esogeno δd′ sull’uscitaT (s) fdt del
trasduttore di misura
Si definisce funzione d’anello Ga(s) il prodotto delle fdt che
si incontrano partendodall’errore δη e percorrendo l’anello di
retroazione fino a ritornarvi. Nella trattazioneche segue i segnali
verranno sempre considerati scalari e quindi i fattori di un
prodottodi fdt possono commutare.
La funzione d’anello si definisce come:
Ga(s) = G′(s)A(s)R′(s)T (s)
Qualora i segnali fossero vettoriali e quindi le fdt fossero in
realtà delle matrici difdt (di dimensioni opportune), l’ordine del
prodotto andrebbe rigorosamente mante-nuto. I sistemi dove si hanno
segnali vettoriali vengono detti Sistemi MIMO (MultipleInput
Multiple Output).
Nella trattazione che segue i segnali verranno sempre
considerati scalari e in talecaso i fattori di un prodotto di fdt
possono commutare. I sistemi dove si hanno segnaliscalari vengono
detti Sistemi SISO (Single Input Single Output).
Nella Figura 1.3 è stata operata una rielaborazione della
Figura 1.2, spostando iblocchi di trasduzione a monte dei nodi di
somma e arretrando la fdt dell’impiantoverso l’ingresso, in modo da
ottenere due nodi di somma sul segnale in uscita.
Notiamo che:
1. la fdt T (s) del trasduttore di misura è stata inglobata
nella fdt del regolatore;
2. la fdt A(s) dell’attuatore è stata inglobata nella fdt
dell’impianto; volendo, sipoteva inglobarla anche nella fdt del
regolatore;
3. è stata usata l’algebra dei blocchi per spostare a monte dei
nodi di somma laT (s), che diventa quindi T−1(s).
La funzione d’anello Ga(s) vale ancora
Ga(s) = G′(s)A(s)R′(s)T (s)
Nella Figura 1.4 è stata operata una ulteriore semplificazione
della Figura 1.3,come descritto nel seguito:
6
-
Figura 1.3: Schema a blocchi della Figura 1.2 rielaborato.
1. poiché la fdt del trasduttore di misura T (s) e la fdt del
trasduttore del riferi-mento T 0(s) sono spesso identiche, è stato
posto T 0(s)T−1(s) = I;
2. il segnale di disturbo sull’attuatore dA(s) è stato
considerato nullo;
3. il segnale di riferimento w(s) viene indicato con il simbolo
r(s).
+
–
e u
+
+
( )G s( )C sr
d+
–n
y+
–
e u
+
+
( )G s( )C sr
d+
–n
y
Figura 1.4: Schema a blocchi della Figura 1.3 rielaborato.
La funzione d’anello Ga(s) vale ora
Ga(s) = C(s)G(s) (1.1)
dove C(s) = T (s)R′(s) e G(s) = A(s)G′(s).Nei testi di controlli
automatici la fdt C(s) del controllore viene indicata anche con
i simboli Gc(s) oppure R(s); tuttavia nel seguito useremo
esclusivamente la notazioneC(s).
Osservando la Figura 1.4, possiamo notare che esistono tre
segnali o variabili cheentrano nel sistema (dette anche variabili
esogene):
7
-
• il riferimento r(s);• il rumore di misura n(s);• il disturbo
sull’uscita d(s).
Solo il riferimento r è manipolabile dal progettista del
controllo, mentre gli altri duesono segnali non manipolabili.
Analogamente, tre sono i segnali che rivestono interesse per le
specifiche di con-trollo, ossia:
• l’errore e(s) = r(s)− y(s) tra riferimento e misura;• il
segnale di comando, u(s), elaborato dal controllore C(s);• l’uscita
y(s), che è il segnale che vogliamo controllare.È possibile
scrivere in forma matriciale le relazioni tra ingressi e
uscite:
y(s)u(s)e(s)
=
Geq(s) S(s) −Geq(s)Q(s) −Q(s) −Q(s)S(s) −S(s) Geq(s)
r(s)d(s)n(s)
(1.2)
dove si sono definite le seguenti fdt (per sistemi SISO):
• funzione di sensitività complementare o funzione (di
trasferimento)equivalente o funzione (di trasferimento) ad anello
chiuso:
Geq(s) =y(s)r(s)
=C(s)G(s)
1 + C(s)G(s)=
Ga(s)1 + Ga(s)
(1.3)
• funzione di sensitività
S(s) =e(s)r(s)
=1
1 + C(s)G(s)=
11 + Ga(s)
(1.4)
• funzione di sensitività del controllo o del comando
Q(s) =u(s)r(s)
=C(s)
1 + C(s)G(s)=
C(s)1 + Ga(s)
= Geq(s)G(s)−1 = C(s)S(s) (1.5)
Osserviamo che l’uscita y dipende dalle tre variabili esogene
nel modo seguente:
y(s) = Geq(s)r(s)−Geqn(s) + S(s)d(s); (1.6)
la variabile di comando risulta invece essere:
u(s) = Q(s)r(s)−Q(s)d(s)−Q(s)n(s), (1.7)
mentre l’errore vale:
e(s) = S(s)r(s)− S(s)d(s) + Geq(s)n(s). (1.8)
8
-
Notiamo dalle (1.3) e (1.4) che esiste tra le fdt Geq(s) e S(s)
il vincolo
Geq(s) + S(s) = 1 + j0 (1.9)
e quindi non è possibile assegnare indipendentemente Geq(s) e
S(s) mediante il pro-getto del controllore C(s), in quanto il
progetto di una fdt influenza l’altra e occorrebilanciare i loro
effetti, come vedremo meglio in seguito.
Ad esempio, se volessimo garantire il perfetto inseguimento, per
ogni pulsazioneω, del riferimento r da parte dell’uscita y,
dovremmo porre
y(jω) = r(jω) ⇔ Geq(jω) = 1, ∀ω; (1.10)
ma cos̀ı facendo risulterebbeS(jω) = 0, ∀ω. (1.11)
Quest’ultima condizione garantisce certamente l’attenuazione
perfetta dell’effetto deldisturbo d sull’uscita (equazione (1.6)),
ma non garantisce invece nessuna attenua-zione del disturbo di
misura n sia sull’uscita y sia sull’errore e (equazioni (1.6)
e(1.8)).
Inoltre, dalla (1.5), risulterebbe che
Q(jω) = G−1(jω), ∀ω. (1.12)
Prima di commentare il significato di questa relazione,
ricordiamo alcune proprietàdelle funzioni razionali fratte.
Funzioni razionali fratte Dati due polinomi in s, N(s) e D(s),
rispettivamentedi grado ρ(N) e ρ(D), si dice che la funzione
razionale fratta
G(s) =N(s)D(s)
è strettamente propria se ρ(D) > ρ(N), mentre è propria se
ρ(D) ≥ ρ(N); ricordiamoanche che, se non si hanno cancellazioni tra
le radici del denominatore (poli) e delnumeratore (zeri), ρ(D) è
uguale al numero di poli (contati con le loro molteplicità)del
sistema dinamico lineare rappresentato dalla G(s), mentre il numero
di zeri è datoda ρ(N).
Ricordiamo poi che il grado del prodotto tra due polinomi,
ρ(N1N2) è uguale allasomma dei gradi ρ(N1N2) = ρ(N1)+ρ(N2), mentre
il grado di una somma di polinomiρ(N1 +N2) è uguale al massimo
grado dei termini, ρ(N1 +N2) = max {ρ(N1), ρ(N2)}.
Ricordiamo anche che la differenza tra poli e zeri (l’eccesso
poli-zeri) della G(s) èdefinito da ν = ρ(D)− ρ(N) e fornisce
l’indicazione della pendenza del diagramma diBode (approssimato)
della G(s) =
N(s)D(s)
per ω →∞, che vale −ν 20dB/dec.
Tutto ciò premesso, ritorniamo a commentare i vincoli sul
progetto posti dallaequazione (1.12).
Nell’ipotesi molto ragionevole che G(s) sia strettamente
propria, in quanto si trattadella fdt di un sistema fisico, dove si
ha sempre attenuazione crescente dei segnali adalta frequenza,
segue che in (1.12)
∣∣G−1(jω)∣∣ = |Q(s)| cresce al crescere di ω. Allora,
9
-
per ω sufficientemente elevati, l’attività del comando risulta
significativa, in contrastocon una delle specifiche di progetto,
che è quella di avere invece una limitata attivitàdel comando,
come vedremo più in dettaglio nel seguito.
Inoltre, essendo la G(s) =NG(s)DG(s)
strettamente propria ed il compensatore C(s) =
NC(s)DC(s)
proprio (basta che sia soltanto proprio per essere fisicamente
realizzabile come
sistema causale), la funzione d’anello Ga risulta strettamente
propria
Ga =Na(s)Da(s)
=NC(s)NG(s)DC(s)DG(s)
, (1.13)
come pure strettamente propria risulta, dalla (1.3), la
Geq(s)
Geq =Neq(s)Deq(s)
=NC(s)NG(s)
NC(s)NG(s) + DC(s)DG(s), (1.14)
mentre propria risulta la S(s), essendo
S(s) =NS(s)DS(s)
=DC(s)DG(s)
NC(s)NG(s) + DC(s)DG(s). (1.15)
Ne segue che Geq(jω) → 0, per ω →∞, mentre S(jω) → 1 e quindi le
specifiche (1.10)e (1.11) non sarebbero comunque soddisfatte.
1.2 Specifiche di Progetto
Nel seguito verranno brevemente riassunte le specifiche di
progetto, la cui trattazionesegue da vicino il testo [1].
Le specifiche di progetto fissano i requisiti che il sistema
deve possedere una voltache sia stato controllato, e quindi
impongono vincoli e caratteristiche alle funzioni ditrasferimento
da progettare o risultanti dal progetto, ossia le funzioni Geq(s),
S(s) eQ(s).
Le specifiche di progetto più comuni sono:
S1: stabilità nominale;
S2: stabilità robusta;
S3: precisione statica;
S4: precisione dinamica;
S5: attenuazione dell’effetto del disturbo d;
S6: attenuazione dell’effetto del rumore n;
S7: moderazione dell’attività del comando;
S8: realizzabilità del controllore.
Esaminiamole ora brevemente una ad una.
10
-
1.2.1 Stabilità nominale
Prima di procedere, ricordiamo brevemente i parametri di
progetto che possono in-fluenzare la stabilità di un impianto,
facendo riferimento allo schema semplificato conreazione unitaria
presentato nella Figura 1.5.
+
–( )aG s
( )e s( )r s ( )y s+
–( )aG s
+
–( )aG s
( )e s( )r s ( )y s
Figura 1.5: Generico schema a blocchi di un sistema a
retroazione unitaria.
Pulsazione di cross-over o critica. In generale si definisce
pulsazione critica ωcla pulsazione per cui si ha il primo
attraversamento (dall’alto verso il basso)del diagramma di Bode
della |Ga(jω)|dB con l’asse orizzontale a 0 dB. Ne segueovviamente
che |Ga(jωc)| = 1. Questa definizione vale solo per sistemi che
hannotutte le singolarità (poli e zeri) nel semipiano complesso di
sinistra.
Margine di fase. Data la fdt d’anello Ga(s) e la relativa
pulsazione di cross-overωc, si definisce margine di fase ϕm la
differenza (con segno), misurata in gradi,tra 180◦ e il valore
assoluto della fase di Ga(jωc), ossia
ϕm = 180◦ − |ϕc| dove ϕc = ∠Ga(jωc) (1.16)e |Ga(jωc)| = 1
La relazione esatta tra margine di fase ϕm e smorzamento ζ si
può calcola-re nell’ipotesi l’approssimazione che il sistema
comprenda una coppia di polidominanti
y(s)u(s)
= Kω2n
s2 + 2ζωns + ω2n+ · · ·
di Geq(s), valex (1.17)
Esiste anche una relazione approssimata (vedi [1]) che vale
ζ =ϕm2
π
180◦' ϕm
100⇒ ϕm ' 100ζ (1.18)
Margine di guadagno. Data la fdt d’anello Ga(s), si definisce
margine di guadagnokm l’inverso del modulo di Ga(s) calcolato alla
pulsazione ωπ, dove ωπ è lapulsazione per cui la fase di Ga(s)
vale 180◦. Ovvero:
km =1
|Ga(jωπ)| dove ∠Ga(jωπ) = 180◦ (1.19)
11
-
Ritardo. Consideriamo la Figura 1.6, dove abbiamo introdotto un
generico ritardodi τ secondi in serie alla fdt Ga(s); il blocco del
ritardo non è rappresentabile dauna funzione polinomiale fratta;
si osserva che la fdt di un ritardo, G(s) = e−τs
ha modulo e fase che godono delle seguenti proprietà:∣∣e−jωτ ∣∣
= 1, ∀ω∠e−jωτ = −ωτ, in radianti∠e−jωτ = −ωτ 180◦/π, in gradi
(1.20)
+
–( )aG sse τ−
Figura 1.6: Generico schema a blocchi di un sistema a
retroazione unitaria con ritardodi τ secondi.
Un ritardo quindi non attenua il segnale, ma provoca una perdita
di fase pro-porzionale al tempo di ritardo τ e crescente con la
pulsazione.
La fdt G(s) = e−τs non è razionale in s, ma se ne può trovare
un’approssimazionerazionale secondo il metodo di Padé del
prim’ordine, come segue:
G1(s) =1− 0.5τs1 + 0.5τs
. (1.21)
Possiamo ora enunciare alcune semplici regole di progetto per
garantire la stabilitànominale.
La stabilità del sistema in condizioni nominali è garantita se
sono rispettati ilcriterio di Nyquist e il criterio di Bode.
Criterio di Nyquist – consideriamo la fdt d’anello Ga(s); sia nP
il numero di polinel semipiano complesso di destra (con parte reale
maggiore di zero), e N ilnumero di giri compiuti dal diagramma di
Nyquist di Ga(s) intorno al punto−1+j0 (conteggiati positivamente
se compiuti in senso antiorario, negativamentese compiuti in senso
orario). Allora, vale il seguente teorema:
Condizione necessaria e sufficiente per l’asintotica stabilità
(nominale) del siste-
ma reazionato Geq(s) =Ga(s)
1 + Ga(s)è che risulti N = nP .
Va notato che occorre evitare cancellazioni tra poli e zeri di
Ga(s) = Na/Daposti nel semipiano di destra, ossia, in generale, tra
le radici del polinomio Da equelle del polinomio Na, altrimenti il
numero nP può apparire diverso da quelloche è veramente e portare
a conclusioni errate.
Criterio di Bode – consideriamo nuovamente il sistema reazionato
di Figura 1.5.Facciamo l’ipotesi che:
12
-
a) Ga(s) non abbia poli con parte reale maggiore di zero (poli
instabili), ossianP = 0;
b) il diagramma di Bode del modulo |Ga(jω)| attraversi una sola
volta l’assea 0 dB.
Allora, indicando con Ka il guadagno stazionario (ossia per ω →
0) di Ga(s)e con ϕm il margine di fase, condizione necessaria e
sufficiente per l’asintotica
stabilità del sistema reazionato Geq(s) =Ga(s)
1 + Ga(s)è che risulti Ka > 0 e
ϕm > 0◦.
Notiamo alcuni aspetti di questo teorema: innanzitutto, se Ga(s)
è strettamen-te propria (come visto poco sopra), l’intersezione
tra l’asse 0 dB e il modulo|Ga(jω)|dB avviene, se unica, dall’alto
verso il basso. Inoltre la condizione b)garantisce che sia
univocamente definita la pulsazione di cross-over (o pulsazio-ne
critica) ωc, per la quale risulta |Ga(jωc)| = 1, e di conseguenza
che il marginedi fase sia ben definito.
Tutto ciò premesso, la stabilità nominale viene garantita se
il progetto del con-trollore impone che il guadagno stazionario Ka
di anello (o della funzione d’anello) eil margine di fase ϕm siano
entrambi positivi. Ricordiamo che il criterio di Nyquistipotizza
che non vi siano cancellazioni tra poli e zeri di Ga(s) e quindi
che non visiano cancellazioni tra poli e zeri di C(s) e G(s).
1.2.2 Stabilità robusta
Imponendo la specifica di stabilità robusta all’impianto, si
vogliono garantire le pro-prietà di stabilità anche nel caso in
cui il modello G(s) dell’impianto sia approssimato,cosa che risulta
sempre vera, poiché l’impianto da controllare è nonlineare,
mentreesso viene modellato con una fdt lineare e vengono trascurate
le dinamiche parassite(come la dinamica della parte elettrica del
motore e le dinamiche elastiche presenti neigiunti di
trasmissione), che nella realtà esistono e che dobbiamo garantire
non avereeffetti negativi sul controllo.
Per assicurare un elevato grado di robustezza rispetto alle
incertezze strutturali oparametriche del modello dell’impianto dato
da G(s), occorre imporre valori elevati delmargine di fase ϕm e del
margine di guadagno km della funzione d’anello Ga(s).
Inoltreoccorre non aumentare eccessivamente la pulsazione di
cross-over ωc, per evitare chepossibili ritardi di tempo presenti
nel sistema (per effetto di ritardi di misura, ditrasmissione dei
dati, di elaborazione dei dati ecc.) possano condurre
all’instabilità.Infatti, in presenza di un ritardo, dalla (1.20),
il margine di fase ϕm calcolato in ωcviene ridotto di una quantità
pari a ϕτ = −ωcτ 180◦/π.
1.2.3 Precisione statica
La precisione statica misura la capacità di ottenere un errore
trascurabile o nullo trariferimento e uscita al termine del
transitorio (errore a regime).
Per ridurre l’errore a regime e∞ in presenza di ingressi a
gradino o a rampa, occorreadeguare il tipo della funzione d’anello
Ga(s) alle specifiche desiderate, ad esempio
13
-
aumentandolo a 2 se si richiede un errore nullo a regime per
ingressi a rampa, oppureaumentare il guadagno Ka d’anello.
1.2.4 Precisione dinamica
La precisione dinamica misura la capacità di seguire fedelmente
segnali rapidamentevariabili; questa specifica richiederebbe di
soddisfare, nel caso ideale, il vincolo datodalla (1.10), che
appunto consente di ottenere l’inseguimento perfetto del
riferimen-to r(jω) da parte dell’uscita y(jω) per qualunque
pulsazione ω. Ciò richiederebbeappunto Geq(jω) = 1, ∀ω.
Tuttavia il criterio di stabilità di Bode pone alcune
restrizioni sulla forma dellaGeq(jω); infatti, l’attraversamento
dall’alto verso il basso dell’asse a 0 dB del diagram-ma di Bode di
|Ga(jω)| alla pulsazione ωc, implica che sia |Ga(jω)| > 1 per ω
< ωc e|Ga(jω)| < 1 per ω > ωc.
Poiché |Geq(jω)| = Ga(jω)1 + Ga(jω) , le implicazioni
precedenti portano a riteneresoddisfatta la seguente
approssimazione:
|Geq(jω)| '{
1 per ω ≤ ωc|Ga(jω)| per ω > ωc. (1.22)
L’approssimazione è migliore
• quanto più |Ga(jω)| À 1, e ciò è tanto più vero se ω ¿ ωc•
|Ga(jω)| ¿ 1 per ω > ωc e ciò è tanto più vero se ω À ωc
.
Nell’intorno della pulsazione ωc la (1.22) è molto imprecisa e
occorre verificare ilcomportamento di |Geq(jω)| per non avere
sorprese.
Comunque, quanto visto ci assicura che il requisito (1.10) sia
verificato almenofino a ωc e quindi segue che la precisione
dinamica aumenta all’aumentare della bandapassante del sistema
controllato.
Per rispettare questa specifica occorre quindi aumentare la
pulsazione di cross-overωc di Ga(s).
Nello stesso tempo occorre diminuire le sovraelongazioni della
risposta ai segnalicanonici, come il gradino, la rampa, la parabola
ecc.; questo si può ottenere aumen-tando lo smorzamento della
coppia di poli dominanti di Geq(s). Dalla espressioneapprossimata
(1.18), si deduce che ciò equivale a richiedere un margine di fase
ϕmrelativamente elevato.
Occorre qui ricordare che i parametri che misurano la velocità
di risposta, come iltempo di salita Ts, il tempo di assestamento Ta
e la sovraelongazione massima S%,validi in modo esatto per la
risposta a gradino di sistemi del second’ordine privi dizeri,
possono essere approssimativamente utilizzati anche per sistemi di
ordine piùelevato, purché si riferiscano tali parametri alla
coppia di poli dominanti della Geq(s)e forniscano solo limiti
inferiori a ωc e ϕm.
Si veda l’Appendice A per la caratterizzazione dei sistemi del
second’ordine.
14
-
1.2.5 Attenuazione dell’effetto del disturbo d
Come risulta dalle relazioni (1.6) e (1.8), il disturbo d agisce
sull’uscita y e sull’er-rore e attraverso la funzione di
sensitività S(s); pertanto è quest’ultima che occorreprogettare
in modo adeguato per attenuare l’effetto del disturbo.
Considerando che, come visto per la specifica precedente,
possiamo ipotizzare|Ga(jω)| À 1 per ω < ωc e |Ga(jω)| ¿ 1 per ω
> ωc, ne consegue che:
|S(jω)| = 1|1 + Ga(jω)| '
1|Ga(jω)| per ω ≤ ωc
1 per ω > ωc(1.23)
Occorre perciò fare in modo che |Ga(jω̄)| À 1 per
quell’intervallo di pulsazioni ω̄ in cuiil disturbo ha uno spettro
di potenza significativo, in modo da ottenere |S(jω̄)| ¿ 1.
È infine opportuno sottolineare che il vincolo (1.9) va inteso
valere contempora-neamente in modulo e fase, quindi
|Geq(jω) + S(jω)| = 1∠(Geq(jω) + S(jω)) = 0◦
(1.24)
e che il modulo di una somma NON è generalmente uguale alla
somma dei moduli ecos̀ı pure per la fase di una somma.
Inoltre, come già accennato discutendo la specifica di
precisione dinamica, occorreverificare con attenzione il
comportamento di Geq(jω) e S(jω) in corrispondenza allapulsazione
critica ωc, dove le approssimazioni introdotte potrebbero non
essere valide.
1.2.6 Attenuazione dell’effetto del rumore n
Come risulta dalla relazioni (1.6) e (1.8), il rumore n agisce
sull’uscita y e sull’erroree attraverso la funzione di sensitività
complementare Geq(s); quest’ultima è la stessafdt che vorremmo
seguisse le specifiche di perfetto inseguimento indicate nella
(1.10),in contrasto con le specifiche di attenuazione introdotte al
punto precedente.
Poiché si può assumere con una certa sicurezza che le
componenti principali dellospettro del rumore n siano
prevalentemente localizzate alle alte frequenze, è
sufficienteimporre un vincolo sul valore massimo della pulsazione
di cross-over ωc, oltre la qualela Geq(s) diminuisce
rapidamente.
Si può pensare di aumentare questo effetto forzando nella
Geq(s) un eccesso poli-zeri superiore a uno e quindi facendola più
rapidamente decrescere alle alte frequenze.
1.2.7 Moderazione dell’attività del comando
Dalla relazione (1.7) appare che ridurre l’attività del comando
significa ridurre glieffetti della funzione di sensitività del
controllo
Q(s) =C(s)
1 + C(s)G(s)= Geq(s)G(s)−1 = C(s)S(s),
almeno nell’intervallo di pulsazioni per cui il riferimento r,
il disturbo d e il rumoren hanno componenti significative.
15
-
Sfortunatamente i segnali r e d hanno componenti significative
prevalentementealle basse frequenze, mentre n ha prevalentemente
componenti ad alta frequenza.
Per questo motivo occorre che il modulo |Q(jω)| sia
sufficientemente basso a tuttele pulsazioni ω.
Inoltre, essendo Q(s) =NCDG
NCNG + DCDG=
NCDGNa + Da
, si può osservare dalla (1.14)
che i poli di Q(s) sono gli stessi poli di Geq(s), mentre gli
zeri di Q(s) sono l’insiemedegli zeri di C(s) e dei poli
dell’impianto G(s).
L’effetto degli zeri sulla risposta al gradino di un sistema con
una coppia di polidominanti (e quindi approssimativamente del
second’ordine) si può riassumere nelmodo seguente. Chiamando y′(t)
la risposta al gradino di una fdt con una coppia dipoli dominanti e
priva di zeri
G′(s) =k2ω
2n
s2 + 2ζωns + ω2n,
la risposta al gradino della fdt con uno zero aggiunto
G(s) =k2ω
2n(1 + τzs)
s2 + 2ζωns + ω2n= G′(s)(1 + τzs)
sarà:
y(t) = y′(t) + τzdy′(t)
dt.
Quindi, al segnale y′(t) si aggiungerà un effetto proporzionale
alla derivata di y′(t),attraverso la costante di tempo τz; quanto
più τz è grande (ossia lo zero è a bassafrequenza), tanto più
questo effetto è marcato, e viceversa per uno zero ad alta
fre-quenza, che produce quindi un effetto trascurabile. Per
approfondimenti, si consigliadi consultare [1, pagg. 122-123].
Quanto descritto impone che gli zeri di C(s) non siano collocati
a frequenze troppobasse per non indurre comportamenti troppo
sovraelongati all’attività del comando.
D’altro canto, consideriamo il modulo |Q(jω)|:
|Q(jω)| = ∣∣Geq(jω)G−1(jω)∣∣ = |C(jω)S(jω)| (1.25)
Poiché per ω ≤ ωc si ha |Geq(jω)| ' 1 e per ω > ωc si ha
|S(jω)| ' 1, otteniamo
|Q(jω)| '
1|G(jω)| per ω ≤ ωc
|C(jω)| per ω > ωc(1.26)
Da tutto ciò discende che il comportamento a bassa frequenza
della Q(s) non è mo-dificabile, in quanto dipende essenzialmente
dall’impianto attraverso l’inversa dellasua fdt G(s), che è data,
mentre il comportamento ad alta frequenza dipende dalcomportamento
in alta frequenza del controllore C(s), che quindi occorre limitare
perlimitare l’attività del comando. Per approfondimenti, si
consiglia di consultare [1,pagg. 347–349].
16
-
1.2.8 Realizzabilità del controllore
La realizzabilità fisica del controllore impone che la fdt C(s)
=NC(s)DC(s)
sia almeno
propria, se non strettamente propria, ossia ρ(NC) ≤
ρ(Dc).Poiché dalla Ga(s) = C(s)G(s) abbiamo
C(s) = Ga(s)G−1(s) =NC(s)DC(s)
=NaDGDaNG
,
occorre che siaρ(Na) + ρ(DG) ≤ ρ(Da) + ρ(NG),
cioèρ(Da)− ρ(Na) ≥ ρ(DG)− ρ(NG)
e quindi ν(Ga) ≥ ν(G).Ciò porta, in definitiva, a dover fissare
un eccesso poli-zeri della funzione d’anello
Ga non inferiore a quella dell’impianto G.
17
-
Capitolo 2
Reti di compensazione
Nel seguito sono elencate le caratteristiche delle reti di
compensazione derivative eintegrative e successivamente delle reti
PID. Queste reti sono tra quelle più comu-nemente utilizzate per
il controllo dei robot che adottano un’architettura a
giuntiindipendenti.
2.1 Rete derivativa
Una rete derivativa, detta anche rete anticipatrice (in inglese
phase-lead compensator)è un compensatore descritto dalla seguente
fdt:
Cd(jω) = Kd(jω + zd)(jω + pd)
= K ′d(1 + jωτd)(1 + jω
τdα
) , con α ≥ 1 (2.1)
Come si nota dalla (2.1), una volta fissata la posizione zd
dello zero (ovvero dellasua costante di tempo τd), il polo pd viene
posto a una pulsazione α volte maggiore,tale che pd = αzd.
La rete derivativa ha lo scopo di introdurre un anticipo di fase
in corrispondenzadella pulsazione di cross-over ωc; aumentando il
valore del parametro α, l’anticipo difase tende a 90◦, ma questo
provoca un’amplificazione eccessiva del modulo alle
altefrequenze.
Un buon compromesso tra le due esigenze si ha ponendo 6 ≤ α ≤
10.Per α = 1 la rete comporta la cancellazione tra lo zero e il
polo e quindi si riduce
ad un semplice compensatore proporzionale, mentre per α → ∞ il
compensatore sitrasforma in una rete PD (caso particolare di
compensatore PID, che vedremo nelParagrafo successivo).
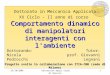
Nella Figura 2.1 sono riportati i diagrammi di modulo e fase
della rete derivativa(2.1) al variare del parametro α. Il massimo
guadagno di fase è pari a ϕm, dove
ϕm = arcsinα− 1α + 1
e tale guadagno avviene alla pulsazione ωm, media geometrica tra
zd e pd
ωm =√
zdpd =1
τd√
α
18
-
0
5
10
15
20
Mod
ulo
norm
aliz
zato
10−1
100
101
102
0
10
20
30
40
50
60
Fas
e (g
radi
)
α =3α = 2
α = 4α = 5
α =8
α = 6α =7
α = 6α =7
α =8
α = 2α =3
α = 4α = 5
ωτ
Figura 2.1: Diagramma di modulo e fase della rete derivativa, al
variare del parametroα. In ascissa la variabile normalizzata ωτd;
lo zero zd si trova in ωτd = 1.
Il guadagno di fase è in funzione del parametro α è riportato
nel grafico di Figura 2.2
2.1.1 Caratteristiche complessive
La rete derivativa viene utilizzata per aggiungere fase positiva
intorno alla frequenzadi cross-over ωc.
EffettiAumenta la banda passante del sistema controllato.Aumenta
il guadagno ad alta frequenza.
VantaggiMigliora la risposta dinamica.
SvantaggiAllarga la banda e quindi la sensitività al
rumore.
È utilizzabileQuando si desidera una risposta rapida in
transitorio.
19
-
0 2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
α
φ m (
grad
i)
Figura 2.2: Diagramma del guadagno di fase ϕm della rete
derivativa, al variare delparametro α.
Non è utilizzabileQuando la fase della fdt dell’impianto
descresce rapidamente in prossimità dellafrequenza di
crossover.
2.2 Rete integrativa
Una rete integrativa, detta anche rete ritardatrice (in inglese
phase-lag compensator)è un compensatore descritto dalla seguente
fdt
Ci(jω) = Ki(jω + zi)(jω + pi)
= K ′i
(1 + jω
τiα
)
(1 + jωτi), con α ≥ 1 (2.2)
Come si nota dalla (2.2), una volta fissata la posizione del
polo pi (ovvero dellasua costante di tempo τi), lo zero zi viene
posto a frequenza α volte maggiore, taleche zi = αpi.
La rete integrativa può essere utilizzata in due modi
diversi:
1. si dispone il polo e lo zero in modo tale da aumentare il
modulo della Ga(s)alle basse frequenze, lasciandolo invariato alle
alte frequenze. In questo modo sitende a migliorare la precisione
statica o a garantire una maggiore attenuazionedelle componenti a
bassa frequenza del disturbo d, ottenuta attraverso unadiminuzione
del modulo della funzione di sensitività S(s);
2. si dispone il polo e lo zero in modo tale da diminuire il
modulo della Ga(s)alle frequenze medio-alte, lasciandolo invariato
alle basse frequenze, in modoche l’attraversamento dell’asse a 0 dB
avvenga ad una pulsazione ωc minore equindi con margine di fase
più favorevole.
20
-
La rete integrativa introduce però uno sfasamento negativo
(ritardo di fase), ero-
dendo il margine di fase, che raggiunge il valore minimo per ω̄
=√
α
τi. È quindi
opportuno scegliere τiωc À 1, in modo che l’erosione del margine
di fase sia limitata.Nella Figura 2.1 sono riportati i diagrammi di
modulo e fase della rete (2.1) al
variare del parametro α.
−20
−15
−10
−5
0
Mod
ulo
norm
aliz
zato
10−1
100
101
102
−60
−50
−40
−30
−20
−10
0
Fas
e (g
radi
)
ωτ
α = 2α =3
α = 4α = 5 α = 6
α =7α =8
α =8α =7
α = 6α = 5
α = 4α =3
α = 2
Figura 2.3: Diagramma di modulo e fase della rete derivativa, al
variare del parametroα. In ascissa la variabile normalizzata ωτi;
il polo pi si trova in ωτi = 1.
2.2.1 Caratteristiche
La rete integrativa viene utilizzata per diminuire il modulo
della Ga(s), in modo che lapulsazione di cross-over ωc diminuisca.
Alternativamente viene usata per aumentareil modulo della Ga(s) a
parità di ωc per diminuire il modulo della sensitività S(s).
EffettiDiminuisce la sensitività alle basse frequenze,
mantenendo la posizione dei polidominanti, ovvero il margine di
fase. Diminuisce la banda passante del sistemacontrollato. Aumenta
il guadagno della Ga(s) alle basse frequenze.
VantaggiRiduce l’errore a regime.Riduce il rumore ad alta
frequenza.
21
-
SvantaggiRallenta la risposta in transitorio.
È utilizzabileQuando bisogna rispettare le specifiche di errore
a regime senza cambiare la ωc.
Non è utilizzabileQuando non esiste un intervallo a bassa
frequenza in cui il valore della fasepermette di ottenere il
margine di fase richiesto.
2.3 Compensatori PID
I compensatori o regolatori PID, cos̀ı chiamati perché
esercitano un’azione Propor-zionale, Integrale e Derivativa, sono
idealmente composti da un parallelo di tre con-trollori, il primo
che esercita l’azione proporzionale, il secondo l’azione derivativa
e ilterzo l’azione integrativa, come schematizzato nella Figura
2.4.
+
–
y
r e
( )PC s
( )IC s
( )DC s
++
+
u
Figura 2.4: Schema a blocchi di compensatore PID.
Questo compensatore genera una variabile di comando u(s) che è
la somma deicontributi dei tre compensatori:
u(s) = (CP (s) + CI(s) + CD(s)) e(s).
Come accennato, i compensatori sono progettati per produrre
un’azione proporziona-le, integrale o derivativa, ossia:
CP (s) = KP
CI(s) =KIs
; spesso indicata come1
TIs
CD(s) = KDs spesso indicata come TDs.
22
-
Nel tempo la variabile di comando risulterà data da:
u(t) = KP e(t) + KI∫ t
t0
e(τ)dτ + u(t0) + KDde(t)dt
e in trasformate di Laplace come:
u(s) = CPID(s)e(s),
dove
CPID(s) = CP (s) + CI(s) + CD(s) =NPID(s)DPID(s)
=
=KDs
2 + KP s + KIs
=(s + z1)(s + z2)
s. (2.3)
Come si vede, la funzione di trasferimento CPID(s) del
compensatore PID idealenon è causale, in quanto l’ordine del
numeratore supera l’ordine del denominatore.
Nella pratica è quindi necessario modificare la fdt in (2.3)
per costruire una fdtpropria o strettamente propria.
Questo lo si ottiene aggiungendo uno o più poli di chiusura; si
tratta di poli postiad una pulsazione sufficientemente elevata da
non cancellare le caratteristiche positivedella rete in termini, ad
esempio, di margine di fase e banda passante, ma non troppoelevata
da produrre una eccessiva attività del comando o una banda
passante troppoelevata.
La decisione di introdurre un solo polo di chiusura oppure più
di uno dipendeda considerazioni di progetto robusto, derivanti in
parte dall’analisi delle specifichediscusse nei punti precedenti,
in parte dai vincoli posti dalle dinamiche dell’impiantotrascurate
nel modello, ad esempio le dinamiche parassite elastiche poco
smorzate.
Aggiungendo i poli di chiusura, la fdt della parte derivativa
del compensatorerisulta essere
C∗D(s) =KDs∏n
i=1(1 + τcis),
dove sono genericamente previsti n poli di chiusura ad alta
frequenza con costanti ditempo τci.
Se consideriamo un solo polo di chiusura la nuova fdt C∗PID(s)
risulta ora:
C∗PID(s) =(KD + τcKP )s2 + (KP + τcKI)s + KI
τcs2 + s=
(s + z′1)(s + z′2)
s(s + p1). (2.4)
Confrontando la (2.4) con la (2.3) osserviamo che la fdt (2.4)
è ora propria, ma rispettoalla (2.3) sono cambiati gli zeri.
Un altra avvertenza, da usarsi nella pratica, è la seguente:
poiché la fdt CD(s)dell’azione derivativa è posta dopo il nodo di
differenza tra il riferimento r e la misuray, può accadere che una
brusca variazione del riferimento, ad esempio per variazioni
agradino di quest’ultimo, porti ad un impulso nella derivata e
quindi ad una saturazionedel segnale di comando u.
Appare perciò più indicato inserire l’azione derivativa a
monte del nodo sommato-re; va notato, a questo proposito, che la
misura y, essendo l’uscita di un impianto che
23
-
ha comunque le caratteristiche di filtro passa-basso, non
dovrebbe contenere variazio-ni improvvise di notevole ampiezza e
quindi risulta meno “pericoloso” calcolarne laderivata. Lo schema a
blocchi di questa soluzione è rappresentato in Figura 2.5.
+
–
y
r e
( )PC s( )PC s
( )IC s( )IC s
( )DC s′ ( )DC s′
++
+
u
Figura 2.5: Schema a blocchi di un compensatore PID, con azione
derivativa limitataalla sola uscita y.
Ovviamente tale soluzione non è identica a quella ottenibile
con lo schema prece-dente di Figura 2.4; tuttavia, da una semplice
manipolazione dei rispettivi schemi ablocchi, completi della G(s)
dell’impianto, del segnale di disturbo d e con il rumoren = 0,
utilizzando lo schema completo di Figura 2.4 risulta:
y(s) =C∗PIDG(s)
1 + C∗PIDG(s)r(s) +
11 + C∗PIDG(s)
d(s)
u(s) =C∗PID
1 + C∗PIDG(s)r(s)− C
∗PID
1 + C∗PIDG(s)d(s)
mentre, utilizzando lo schema modificato di Figura 2.5,
risulta:
y(s) =CPIG(s)
1 + C∗PIDG(s)r(s) +
11 + C∗PIDG(s)
d(s)
u(s) =CPI
1 + C∗PIDG(s)r(s)− C
∗PID
1 + C∗PIDG(s)d(s)
dove la C∗PID è quella indicata in (2.4), mentre la CPI, che
esercita solo l’azioneproporzionale e derivativa, vale:
CPI =KP s + KI
s
Come si può notare, cambia soltanto l’effetto del riferimento r
sull’uscita y e sulsegnale di comando u, modificandosi solamente
gli zeri delle rispettive fdt.
Vederemo ora come sia possibile utilizzare solo alcune parti del
compensatore,ottenendo compensatori PD o PI.
24
-
2.3.1 Compensatore PD
Si pone KI = 0, ottenendo
CPD(s) = KP + KDs = KP (1 + sTD) con TD =KDKP
Aggiungendo un polo di chiusura ad alta frequenza o comunque
fuori dalla bandad’interesse, si ottiene la rete derivativa
descritta in (2.1).
2.3.2 Compensatore PI
Si pone KD = 0 ottenendo
CPI(s) = KP +KIs
=sKP + KI
s= KP
1 + TIsTIs
con TI =KPKI
.
Oltre all’azione integrale si ha uno zero che consente di
aumentare la banda passante.
2.4 Controllo in feedforward
Con il termine feedforward si intende caratterizzare uno schema
di controllo che pre-vede l’introduzione di un filtro F (s) a monte
del riferimento r. L’introduzione di talefiltro può svolgere
diverse funzioni, tra cui quella di cancellare eventuali zeri del
com-pensatore C(s) e/o migliorare le prestazioni dinamiche della
risposta tra riferimentoe uscita. In tale caso il progetto prende
il nome di progetto a due gradi di libertà,in quanto due sono le
fdt da progettare: il compensatore C(s) e il filtro sull’ingressoF
(s),
Nel caso di semplice feedforward, presentato qui e schematizzato
in Figura 2.6,l’obbiettivo è quello di rendere l’uscita y quanto
più simile alla variabile ausiliaria diriferimento desiderato rd.
Per fare questo è necessario che risulti F (s)Geq(s) = 1, ∀ωe
quindi
F (s) =1 + C(s)G(s)
C(s)G(s)= 1 +
1C(s)G(s)
= 1 + G−1a (s)
I segnali che attraversano il blocco G−1a (s) vengono
successivamente moltiplicati perC(s), dando origine a
u(s) = F (s)C(s)rd(s) =(C(s) + G−1(s)
)rd(s),
per cui lo schema a blocchi può venire modificato nel modo
illustrato in Figura 2.7.In questo caso si può dare un significato
fisico al segnale additivo (di feedforward) uf ,che si somma al
segnale generato dal compensatore, interpretandolo come un
segnaledi coppia “nominale” che, in presenza del modello nominale,
avrebbe generato l’uscitadesiderata.
Questo schema di controllo presenta due caratteristiche
negative. La prima con-siste nella necessità di conoscere
esattamente la struttura e i parametri della fdtdell’impianto G(s);
in caso contrario la compensazione in avanti genera dei segnali
25
-
+
–
–+
( )C s ( )G s–
+ yuer
n d
( )F sdr
Figura 2.6: Schema a blocchi di un compensatore con filtro sul
riferimento.
+
–
( )C s( )C s ( )G syuerdr
1( )−G s
++
fu
Figura 2.7: Schema a blocchi di un compensatore in feedforward,
avendo trascuratoil rumore n e il disturbo d.
che sono solo approssimativamente legati ai segnali necessari a
generare l’uscita de-siderata; tuttavia questa caratteristica non
crea problemi troppo gravi, in quanto ilcontrollo in retroazione,
sempre presente, si incarica dei correggere gli eventuali
errori.
La seconda caratteristica consiste nel dover utilizzare un
filtro G−1(s) per gene-rare il segnale uf . Questo filtro è
sicuramente improprio e quindi non causale, ecomporta la necessità
di eseguire un numero di operazioni di derivazione pari all’or-dine
dell’impianto; anche in questo caso, però, il fatto di doverle
eseguire sul segnaledi riferimento, che di solito si conosce in
forma analitica, riduce la problematicitàdell’operazione.
Ad esempio, nel caso di un controllo indipendente ai giunti per
robot rigidi, la fdtdel i-esimo motore/braccio è data da
G(s) =1
K ′ω(1 + sT )s=
KτRa
Jts2 + s=
K
Jts2 + β′s
dove K =KτRa
e β′ =K ′ωKτ
Ra. In questo caso
G−1(s) =RaKτ
(Jts2 + β′s)
per cui
uf (t) =RaKτ
(Jtr̈d(t) + β′ṙd(t))
Come si può vedere, il segnale di feedforward coincide con le
coppie inerziali e diattrito che si prevede di dover applicare in
funzione dell’accelerazione e della velocitàdesiderate. In questo
caso il segnale di accelerazione r̈d(t) e velocità ṙd(t)
desideratesono facilmente calcolabili fuori linea.
26
-
Appendice A
Sistemi del second’ordine
In questa Appendice si riportano, con brevi commenti, i
principali indicatori numericiche caratterizzano la risposta nel
tempo e in frequenza di un sistema del second’ordine.Tali
indicatori numerici sono utilizzati per stabilire le specifiche di
progetto, comeillustrato nei Paragrafi precedenti.
Si fa notare che questi indicatori possono essere utilizzati per
sistemi di ordine piùelevato, purché tali sistemi presentino una
coppia di poli dominanti e con le opportunecautele dovute alle
inevitabili approssimazioni introdotte.
Il sistema del second’ordine considerato in questa Appendice ha
la seguente fun-zione di trasferimento:
G(s) =y(s)u(s)
= Kω2n
s2 + 2ζωns + ω2n(A.1)
Ricrodiamo che K è il guadagno stazionario (per s → 0) della
fdt, ωn è la pulsazionenaturale o caratteristica e ζ è lo
smorzamento.
A.1 Parametri della risposta nel tempo
La risposta nel tempo al gradino unitario u(t) = g(t), per t
> 0, della (A.1) risultaessere:
y(t) = K
(1− 1√
1− ζ2 e−ζωnt sin
(ωnt
√1− ζ2 + arccos (ζ)
))
In Figura A.1 è riportata la risposta nel tempo normalizzata
y(t)/K di un sistemadel second’ordine con smorzamento ζ variabile
da 0.1 a 1. L’asse delle ascisse è taratorispetto al parameto
adimensionale a ωnt.
I criteri più comunemente usati per caratterizzare la risposta
di un sistema del se-cond’ordine sono la velocità di risposta a
segnali canonici e la capacità di inseguimento(con errore
limitato) del riferimento sia in condizioni di transistorio, sia in
condizionidi regime.
Per quanto riguarda la velocità di risposta, essa si misura
convenzionalmente at-traverso tre parametri: il tempo di salita Ts,
il tempo per cui si ha la massimasovraelongazione Tm e il tempo di
assestamento Taε.
27
-
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
ωn t
y/k
ζ = 0.1 ζ = 0.2ζ = 0.3 ζ = 0.4
ζ = 0.5
ζ = 0.6ζ = 0.7ζ = 0.8
ζ = 0.9ζ = 1.0
Figura A.1: Risposta nel tempo y(t) di un sistema del
second’ordine con guadagnoK = 1 e smorzamento ζ variabile.
Il tempo di salita Ts misura l’intervallo di tempo che trascorre
tra l’istante in cuiy(t) raggiunge il 10% di y∞ e l’istante in cui
raggiunge il 90% di y∞, dove y∞ è ilvalore a regime
dell’uscita.
Il tempo di massima sovraelongazione Tm misura il tempo per cui
si ha il massimoassoluto (sovraelongazione massima) della risposta
y(t).
Il tempo di assestamento Taε, a sua volta funzione di un
parametro ε, indica iltempo oltre il quale la risposta y(t) rimane
permanentemente entro una fascia di ±ε%intorno al valore di regime
y∞.
I tre parametri sono indicati in Figura A.2 e i loro valori
obbediscono alle seguentirelazioni
Ts ' 2.16ζ + 0.60ωn
valida per 0.3 ≤ ζ ≤ 0.8
Tm =π
ωn√
1− ζ2
Taε ' − 1ζωn
ln 0.01ε (stima per eccesso)
La capacità di inseguimento del riferimento viene misurata sia
a regime, sia intransitorio.
Nel primo caso, si definisce l’errore a regime e∞ = r(∞)−y(∞),
che viene utilizzatoper definire il tipo del sistema, e che
contraddistinguono la capacità di inseguire cone∞ = 0 riferimenti
r(t) via via più complessi, quali il gradino (sistema di tipo 1),
larampa (sistema di tipo 2), la parabola (sistema di tipo 3).
Nel secondo caso, è consuetudine misurare la massima
sovraelongazione percen-tuale Mt rispetto al riferimento a gradino
unitario, che come abbiamo visto, avviene
28
-
in corrispondenza dell’istante Tm. Questo parametro vale
Mt = 100 e−
ζπ√1− ζ2
ed è anch’esso indicato in Figura A.2.
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
t
y/k
Ta10
ε = 10%
Ta4
ζ = 0.3 ω
n = 1
Mt
ε = 4%
Tm
Ta
Figura A.2: Parametri che caratterizzano la velocità di
risposta di un sistema delsecond’ordine al gradino unitario.
A.2 Parametri della risposta in frequenza
Il modulo della (A.1) risulta
|Geq(jω)|dB = 20 log∣∣∣∣
11 + 2jζω/ωn − ω2/ω2n
∣∣∣∣ = −20 log√
(1− ω2/ω2n)2 + 4ζ2ω2/ω2ne viene riportato in Figura A.3, per
diversi valori dello smorzamento ζ.
Di solito per caratterizzare tale modulo si utilizzano alcuni
parametri numericiquali il valore del picco massimo o picco di
risonanza Mr, la pulsazione per la qualesi ha tale picco, detta
pulsazione (o frequenza) di risonanza ωr e la banda passanteωB ,
ossia la pulsazione a cui il modulo è pari a −3 dB.
I valori di questi parametri sono dati dalle seguenti
espressioni
Mr = |Geq(jωr)| = 12ζ
√1− ζ2
ωr = ωn√
1− 2ζ2ωB ' (−1.196ζ + 1.85)ωn valida per 0.3 ≤ ζ ≤ 0.8
29
-
10−1
100
101
−30
−27
−24
−21
−18
−15
−12
−9
−6
−3
0
3
6
9
12
15
18
21
24
27
30
Diagramma di Bode del modulo della Geq
ω/ωn (rad/s)
Mod
ulo
norm
aliz
zato
(dB
)
ζ = 0.05
ζ = 0.1
ζ = 0.3 ζ = 0.4
ζ = 0.5
ζ = 0.2
ωB ω
r
Mr
Figura A.3: Parametri che caratterizzano il modulo della fdt di
un sistema del se-cond’ordine, per diversi valori di ζ. I parametri
caratteristici sono indicati per ζ = 0.2.
30
-
Appendice B
Controllo digitale
B.1 Introduzione
Questa Appendice riassume alcune considerazioni utili quando si
debba passare dalprogetto di un controllore a tempo continuo al suo
equivalente digitale o a dati cam-pionati, da inserire in
un’architettura di controllo digitale. Il lettore può trovare
lateoria di base e ulteriori approfondimenti nei testi [1, Capp.
17-18], [4] e [5].
Nell’ipotesi che lo schema a blocchi dell’impianto e del suo
controllore a tempocontinuo sia quello riportato in Figura 1.4, lo
schema a blocchi del sistema digitalecorrispondente è
rappresentato in Figura B.1, dove si è introdotto il blocco A/D,
cherappresenta un convertitore analogico–digitale, e il blocco D/A,
che rappresenta unconvertitore digitale–analogico.
+
–
∗eu
+
+
( )G s( )G s( )∗C z( )∗C z∗r
d
+–
∗ny
D/AD/A
A/DA/D
∗u
y∗y
CONTROLLO DIGITALE
A/DA/Dr
Figura B.1: Schema a blocchi del controllore digitale
corrispondente al controlloreanalogico di Figura 1.4.
Il convertitore analogico-digitale ha lo scopo di trasformare i
segnali a tempo con-tinuo in segnali campionati a tempo discreto e
immagazzinarli in una cella di memoriadi un sistema digitale
composta da Nbit. Quest’ultima trasformazione prende il nomedi
quantizzazione.
31
-
Esso può essere semplicemente schematizzato da un campionatore
ideale di periodoTc, che trasforma un segnale continuo y(t) in una
sequenza di campioni e li quantizza.
y∗(k) = Q{y(kTc)}, per k = 0, 1, . . . ,dove abbiamo fatto
l’ipotesi che il tempo continuo t = 0 coincida con l’istante
dicampionamento k = 0 e che per k < 0 il segnale y(t) risulti
nullo. L’operatore Q{·}indica l’operazione di quantizzazione.
Il campionatore ideale non introduce alcuna dinamica nel sistema
di controllo; iparametri che lo caratterizzano sono il periodo di
campionamento Tc, sulla cui sceltatorneremo più avanti, e la
lunghezza della parola, data dal numero di bit Nbit con cuiviene
codificato e trasmesso il valore digitale del campione y∗.
Dato l’intervallo y∗min ≤ y∗ ≤ y∗max che fissa l’ampiezza di
rappresentazione deisegnali campionati, questo influisce
sull’errore di quantizzazione εq secondo la formulaseguente
εq =|y∗max − y∗min|
2Nbit − 1 '|y∗max − y∗min|
2Nbit.
Si chiama zero-macchina quel valore εq tale per cui se si somma
una costante v′ < εqad un valore qualsiasi v, il risultato vale
v + v′ = v; perciò valori qualsiasi v e v′ lacui differenza v′ − v
≤ εq sono di fatto indistinguibili.
Il convertitore digitale-analogico ha lo scopo di trasformare il
segnale discreto (di-gitale) generato dal controllore in un segnale
continuo a tratti (analogico) che puòvenire inviato all’impianto
da controllare. Il convertitore più comune è rappresentatoda un
mantenitore di ordine zero (in inglese zero-order hold ovvero ZOH )
che prendeil campione y∗(k) e ne mantiene il valore per tutto il
successivo intervallo di tempokTm ≤ t < (k + 1)Tm, dove Tm è il
tempo di mantenimento.
Lo ZOH è un componente del sistema di controllo digitale che
introduce una“dinamica”, rappresentabile dalla funzione di
trasferimento (a guadagno unitario)
GZOH(s) =1− e−sTm
sTm
che può essere approssimata da un ritardo descritto dalla
seguente espressione
GZOH(jω) ' e−jωTm/2 (B.1)valida nell’intervallo 0 ≤ ω < ωN ,
dove ωN è la pulsazione di Nyquist, sulla qualetorneremo più
avanti.
Si fa ora l’ipotesi che il periodo di campionamento Tc e il
periodo di mantenimentoTm siano identici e coincidano con il
periodo T .
Gli schemi simbolici dei convertitori D/A e A/D sono indicati in
Figura B.2.Prima di passare al progetto del controllore digitale è
necessario introdurre le
notazioni utilizzate e ricordare alcuni aspetti della teoria del
campionamento.
B.1.1 Notazioni
Un segnale campionato è rappresentato da una sequenza di
campioni
{. . . , y∗(k), y∗(k + 1), . . .} ,
32
-
D/AD/A
A/DA/D
ZOH
= {
=
Figura B.2: Schemi simbolici dei convertitori A/D e D/A.
con k = 0, . . . , N , dove N può essere finito o infinito.
Ovviamente nei casi reali Nsarà finito. Con abuso di notazione, si
indica con y∗(k) sia la generica sequenza dicampioni y∗(·), sia il
particolare campione y∗ di indice k, allo stesso modo in cui,nel
tempo continuo, y(t) sta ad indicare sia la funzione y(·), sia il
valore particolareassunto al tempo t.
La trasformata Zeta della sequenza di campioni y∗(k) è data
da
Z [y∗(k)] = y∗(z) =+∞∑
k=0
y∗(k)z−k
Normalmente la trasformata Zeta di una sequenza viene indicata
con una letteramaiuscola, cos̀ı come avviene per la trasformata di
Laplace di un segnale continuo.Qui preferiamo invece indicarla con
lettera minuscola, analogamente a quanto fattoper la trasformata di
Laplace.
La trasformata di Fourier discreta della sequenza di campioni
y∗(k), definita per−∞ < k < +∞, è data da
F∗ [y∗(k)] = y∗(ejθ) =+∞∑
k=−∞y∗(k)e−jkθ
Sotto ipotesi matematiche che si possono trovare nei testi [1,
4, 5], vale la seguenterelazione tra trasformata Zeta e trasformata
di Fourier discreta
F∗ [y∗(k)] = Z [y∗(k)]z=ejθovvero è sufficiente operare la
sostituzione simbolica
y∗(ejθ) = y∗(z)|z=ejθper passare dall’una all’altra.
Analogamente a quanto fatto per le fdt tra segnali continui,
indicheremo con C(z)la fdt del controllore e con G(z) la fdt
dell’impianto ottenuto per discretizzazione delsistema dinamico
(A,B ,C ) di cui G(s) è la fdt continua. Nel caso di sistemi
linearie invarianti nel tempo, le fdt discrete sono funzioni
polinomiali fratte nella variabilez e si possono quindi indicare
come rapporto tra un numeratore e un denominatore.
33
-
Ad esempio, per il controllore, possiamo scrivere:
C(z) =NC(z)DC(z)
=b0z
m + b1zm−1 + · · ·+ bm−1z + bmzn + a1zn−1 + · · ·+ an−1z + an .
(B.2)
B.1.2 Campionamento e frequenza di Nyquist
Ricordiamo alcuni fatti fondamentali che condizionano la scelta
del periodo di cam-pionamento T e suggeriscono di prevedere
l’introduzione di un filtro anti-aliasing, amonte del campionatore
A/D.
È noto che, mentre l’operazione di campionamento è univoca,
nel senso che pro-duce una ben definita sequenza di campioni a
partire da una data funzione a tempocontinuo, l’inverso non è
vero: data una sequenza di campioni, è impossibile
risalireunivocamente al segnale continuo che ha generato tale
sequenza; questo fenomeno èdovuto all’aliasing o equivocazione in
frequenza. Matematicamente ciò è spiegabilericordando che la
trasformata di Fourier discreta del segnale y∗(k) campionato con
pe-riodo T è legata alla trasformata di Fourier del segnale
continuo y(jω) dalla relazioneseguente:
y∗(ejωT ) =1T
+∞∑
`=−∞y(j(ω + `ωs)) (B.3)
dove ωs è la frequenza di campionamento o di sampling, che vale
ωs =2πT
.
Per la (B.3), la trasformata di Fourier discreta y∗(ejωT ) è
somma di infinite replichedella y(jω), traslate della quantità
±`ωs.
Senza addentrasi nella caratterizzazione del fenomeno di
aliasing, per il quale sirimanda ai testi già citati in apertura,
limitiamoci a dire che l’effetto dell’aliasingviene evitato se il
segnale y(t) da campionare ha banda limitata, ossia la sua bandanon
supera una data pulsazione massima ωmax e tale pulsazione risulta
inferiore allapulsazione di Nyquist ωN
ωmax < ωN =ωs2
=π
T(B.4)
Se queste condizioni sono verificate, il segnale continuo y(t)
può essere ricostruitoesattamente a partire dai campioni y∗(k)
usando la formula di Shannon (filtro diShannon)
y(t) =+∞∑
k=−∞y∗(k)
sin(ωN t− kπ)(ωN t− kπ) .
Il filtro di Shannon è un decampionatore ideale, ma non è
causale, per cui non èpossibile utilizzarlo in pratica; bisogna
perciò ricorrere a filtri decampionatori causali,che approssimano
il decampionatore di Shannon. Lo ZOH è uno di questi filtri.
Inoltre, poiché non si può garantire che il segnale da
campionare abbia effetti-vamente una banda limitata, oppure, se ce
l’ha, che questa banda sia inferiore allafrequenza di Nyquist, è
opportuno far precedere al convertitore A/D un filtro passa-basso,
detto filtro anti-aliasing, che limiti la banda del segnale ad una
assegnatapulsazione massima ωf . In questo modo il segnale viene
reso approssimativamente abanda limitata e nella (B.4) si ha ωmax '
ωf .
34
-
A tale scopo vengono comunemente impiegati filtri di Butterworth
di ordine n,che garantiscono una buona attenuazione del modulo del
segnale al disopra dellapulsazione ωf del filtro. A causa del fatto
che i filtri anti-aliasing non sono ideali, éopportuno scegliere
la ωf del filtro in modo che non sia semplicemente ωmax ' ωf <ωN
, ma piuttosto ωf ¿ ωN . Va inoltre sottolineato che i filtri di
Butterworth di ordinen introducono una perdita di fase pari a
−n·45◦ alla pulsazione ωf ; questo fatto dovràessere considerato
nella scelta del periodo di campionamento T , che discuteremo
nelseguito.
Riassumendo, si può affermare quanto segue:
• Il convertitore A/D, cioè il campionatore, deve essere di
solito preceduto da unfiltro anti-aliasing, la cui banda ωf verrà
definita in base al periodo di campio-namento T prescelto. Tale
filtro anti-aliasing possiede un certo numero di poliche producono
una perdita di fase ulteriore rispetto a quella già imputabile
alladinamica dell’impianto.
• Il convertitore D/A, di solito uno ZOH, introduce un ritardo
descritto appros-simativamente dalla relazione (B.1). Come abbiamo
visto in (1.20), la perditadi fase dovuta allo ZOH risulta perciò
pari a −ωT 90◦/π (in gradi), che si va asommare alla perdita di
fase descritta sopra.
Esiste un’altra possibile fonte di ritardo, e quindi di perdita
di fase, dovuta all’algorit-mo di controllo. È possibile, infatti,
che il tempo di calcolo τc necessario a produrre ilsuccessivo
segnale di comando sia superiore al periodo di campionamento T . In
questocaso non è possibile mantenere la tempistica della catena
campionatore–controllore–ricostruttore e il progetto va rivisto
riducendo la complessità dell’algoritmo oppuremodificando
l’architettura generale del controllore, ad esempio introducendo
due li-velli di campionamento, uno definito macro-campionamento,
con periodo T , e unodefinito micro-campionamento, con periodo T ′
= T/h, con h > 1 intero. Il macro-campionamento si preoccupa di
fornire i segnali di comando (macro controlli) elaboratisecondo la
complessità algoritmica necessaria, mentre i segnali di comando a
livellodi micro-campionamento vengono ottenuti, ad esempio,
interpolando linearmente imacro controlli. Tale architettura
risulta piuttosto comune, ma le prestazioni deiprocessori che in
futuro saranno montati sui robot la renderanno presto
superata.Possiamo quindi ipotizzare che τc < T .
Tuttavia, anche assumendo che τc < T , si può comunque
generare un ritardo,dovuto alla struttura del controllore C(z).
Supponiamo che il controllore non siastrettamente proprio, ma
solamente proprio; il comando da prodursi all’istante kTdovrà
includere un termine anch’esso definito all’istante kT ; sarà
quindi necessarioattendere l’acquisizione e la trasmissione di tale
termine prima di iniziare il calcolodella variabile di comando, che
terminerà necessariamente τc secondi dopo, introdu-cendo alla fine
un ritardo ulteriore, con la conseguente erosione del margine di
fase.Con i periodi di campionamento usati nei sistemi robotici, e
che si collocano tra 1 m se 10 m s, la perdita di fase −ϕ alla
frequenza di cross-over ωc vale, in gradi,
−0.57ωc ≤ −ϕ ≤ −0.057ωc.
35
-
B.2 Sintesi del controllore digitale
Partiamo dall’ipotesi che il sistema da controllare sia quello
schematizzato in FiguraB.1 e che sia stato previsto un opportuno
filtro anti-aliasing a monte del convertitoreA/D sul segnale
misurato (analogo filtro dovrà essere previsto anche sul segnale
diriferimento), cosi come indicato in Figura B.3.
–
∗eu
( )G s( )G s( )∗C z( )∗C z∗r + y
∗u
y′∗y
CONTROLLO DIGITALE
ZOH
r′
FAAFAA
FAAFAAr
Figura B.3: Schema a blocchi del controllore digitale di Figura
B.1 con l’introduzionedei filtri anti-aliasing FAA.
Dobbiamo ora discutere la scelta del periodo di campionamento T
, per passaresuccessivamente alla sintesi vera e propria del
controllore.
B.2.1 Scelta del periodo di campionamento
Il periodo di campionamento T , ovvero la pulsazione di
campionamento ωs = 2π/T ,va scelto partendo dalla banda ωB che si
vuole imporre al sistema controllato. Que-st’ultimo agisce come un
filtro passa-basso fino alla pulsazione ωB e abbiamo vistoche per
preservare il contenuto informativo fino a questa pulsazione, per
il teoremadel campionamento, è necessario campionare almeno ad una
pulsazione doppia, cioèωs > 2ωB . Se poi stiamo considerando un
controllore continuo, la banda ωB non sidiscosta molto dalla
pulsazione di cross-over ωc, per cui il vincolo diventa ωc <
ωs/2.
Inoltre se per l’anti-aliasing usiamo un filtro di Butterworth
di ordine n e banda ωf ,per il quale la perdita di fase vale −n45◦
alla pulsazione ωf , è opportuno che questaωf sia sufficientemente
superiore a ωc in modo da limitare l’erosione del margine difase,
ossia porre ωc ¿ ωf ; poichè dobbiamo comunque porre ωf < ωN =
ωs/2, sembraragionevole dire che dovrà essere verificato il
vincolo ωc ¿ ωs/2. Un criterio moltousato nella pratica colloca gli
estremi di scelta tra i seguenti:
βωc ≤ ωs ≤ 10βωc, (B.5)
con 5 ≤ β ≤ 10.In questo modo abbiamo fissato un limite
inferiore alla ωs; sembrerebbe inutile
fissare un limite superiore, come nella (B.5), perchè si
potrebbe asserire che quantopiù fitto si campiona, tanto meglio.
Questa affermazione tuttavia non è sempre vera,in primo luogo
perché il costo associato a campionatori veloci (con periodo di
cam-pionamento T molto basso) è piuttosto elevato e in secondo
luogo perché un periodo
36
-
di campionamento T → 0 può dare inconvenienti di natura
numerica, come vedremomeglio nel seguito. Quindi è opportuno
fissare un limite superiore a ωs come in (B.5).
B.2.2 Determinazione della fdt del controllore
Alla sintesi del controllore si può giungere attraverso due
strade. La prima consistenel progettare il controllore a tempo
continuo, seguendo le tecniche riassunte in questanota, e
successivamente discretizzarlo in modo che il comportamento a tempo
discretoapprossimi al meglio le specifiche definite nel continuo.
La seconda strada inveceribalta l’approccio, costruendo
l’equivalente discreto dell’impianto da controllare e,sulla base di
questo e delle specifiche a tempo discreto, progettare direttamente
ilcontrollore digitale.
Nel primo caso parleremo di discretizzazione del controllore
continuo, mentre nelsecondo caso parleremo di sintesi diretta a
tempo discreto.
B.2.3 Discretizzazione del controllore continuo
Possiamo fare riferimento alla figura B.4 che rappresenta una
semplificazione dellaFigura B.3, dove è stato aggiunto il filtro
FS(s) che rappresenta un filtro di smoothing,che ha lo scopo di
lisciare le discontinuità del segnale costante a tratti uscente
dalZOH.
Figura B.4: Schema a blocchi semplificato per il progetto del
controllore digitale.
I segnali e′ e y′ sono sicuramente a banda limitata, perchè
preceduti da un filtroanti-aliasing. La fdt dell’impianto si è
modificata da G(s) a G′(s) perché in essa èstato incluso il
filtro anti-aliasing e anche l’eventuale ritardo di calcolo τc. Il
bloccoracchiuso dalle linee tratteggiate comprende il campionatore,
la fdt discreta C(z)da progettare e lo ZOH. Esso riceve in ingresso
segnali continui a banda limitata erestituisce in uscita i comandi
per l’impianto, anch’essi continui o meglio costanti atratti, in
quanto ricostruiti dallo ZOH. Si tratta perciò complessivamente di
un bloccocontinuo, la cui fdt viene indicata con C(s).
Si tratta ora di progettare C∗(z) in modo da rendere la C(s) il
più possibile similealla C(s) progettata nel continuo.
Ricordando che il campionatore ideale, secondo la (B.3),
moltiplica il modu-lo per 1/T , mentre lo ZOH, secondo la (B.1),
moltiplica il modulo per T , risultacomplessivamente:
C(jω) = e−jωT/2C∗(e−jωT ). (B.6)
37
-
Il primo dei due termini a destra della (B.6) rappresenta un
ritardo puro di τ = T/2con guadagno unitario. Come già sappiamo
dalla (1.21) questo ritardo è approssima-
bile secondo Padé con la fdt G1(s) =1− 0.25Ts1 + 0.25Ts
; esiste anche un’altra funzione di
approssimazione di padé, chiamata G2(s), che omettiamo per
brevità.La presenza di questo elemento di ritardo introduce una
perdita di fase. Tuttavia
se durante il progetto del controllore continuo abbiamo già
considerato la successivatrasformazione in controllore digitale,
allora abbiamo già incluso la G1(s) nel model-lo dell’impianto e
progettato il controllore C(s) di conseguenza.
Alternativamentepossiamo aver fissato una specifica sovrabbondante
sul margine di fase in modo daconsiderarne la successiva erosione
ad opera dello ZOH. Pertanto ora possiamo limi-tarci a considerare
la discretizzazione del solo secondo fattore della parte destra
della(B.6), progettando C∗ in modo che risulti
C∗(e−jωT ) ' C(jω) per 0 ≤ ω ¿ ωN . (B.7)
Ricordiamo che, dato il sistema lineare tempo-invariante e
continuo
ẋ (t) = Ax (t) + Bu(t) (B.8)y(t) = Cx (t) + Du(t) (B.9)
il suo equivalente discreto, ottenuto per campionamento con
periodo T , vale
x ∗(k + 1) = A∗x ∗(k) + B∗u∗(k) (B.10)y∗(k) = Cx ∗(k) + Du∗(k)
(B.11)
dove x ∗(k) = x (kT ), y∗(k) = y(kT ), u∗(k) = u(kT ) e
A∗ = eAT (B.12)
B∗ =∫ T
0
eAτBdτ
Appare evidente che gli autovalori di A∗ e di A sono legati
dalla relazione (B.12) equindi ad ogni autovalore (polo) si nel
continuo corrisponda l’autovalore (polo) neldiscreto zi = esiT .
Gli autovalori seguono quindi la cosiddetta trasformazione
dicampionamento
z = esT . (B.13)
Ora, considerando la (B.13), e quindi la sua inversa s =1T
ln z, potremmo pensare di
ricavare C∗(z) semplicemente ponendo C∗(z) = C(
1T
ln z)
; tuttavia la C∗(z) cos̀ı
ottenuta non risulterebbe una funzione polinomiale fratta, come
in (B.2), e quindinon sarebbe associabile ad un sistema lineare
invariante a dimensione finita.
È necessario perciò ricorrere a tecniche di sostituzione
approssimate, ma tali dagarantire che la fdt ottenuta sia una
funzione razionale di polinomi in z.
38
-
Trasformazione bilineare
Tra queste tecniche approssimate, si utilizza comunemente quella
basata sul metododella trasformazione bilineare, ossia in C(s) si
sostituisce la variabile s con la seguente
s =z − 1
T (αz + 1− α) (B.14)
dove α può assumere valore 0, 0.5 oppure 1. Avremo pertanto lo
schema seguente,che riassume i tre metodi più usati di
approssimazione bilineare:
α = 0 s =z − 1
TMetodo di Eulero in avanti (EA) (B.15)
α = 0.5 s =2(z − 1)T (z + 1)
Metodo di Tutsin (TU) (B.16)
α = 1 s =z − 1Tz
Metodo di Eulero all’indietro (EI) (B.17)
Va fatto osservare che le relazioni (B.15)–(B.17) possono essere
interpretate comeapprossimazioni discrete dell’operazione di
derivata continua, rappresentata dall’ope-ratore s. Infatti,
ricordando il significato dell’operatore z, che soddisfa la
relazione
z±iy(k) = y(k ± i) (B.18)
e applicando ad esempio gli operatori (EA) e (EI) alla funzione
campionata y(k),otteniamo le seguenti relazioni
z − 1T
y(k) ⇒ y(k + 1)− y(k)T
(EA) (B.19)
z − 1Tz
y(k) =1− z−1
Ty(k) ⇒ y(k)− y(k − 1)
T(EI) (B.20)
che rappresentano il rapporto incrementale usando
rispettivamente il campione suc-cessivo e quello attuale, oppure il
campione attuale e quello precedente.
La trasformazione inversa della (B.14) è data da
z =1 + (1− α)Ts
1− αTs (B.21)
che ci consente di trasformare i poli e gli zeri di C(s) in poli
e zeri di C∗(z); inparticolare, per ogni valore di α, i poli/zeri
nell’origine del regolatore continuo sitrasformano in poli/zeri in
z = 1 del regolatore digitale. La Figura B.5 mostraquale sia
l’immagine sul piano complesso Z della trasformazione (B.21)
applicataal semipiano sinistro S−, cioè al semipiano che contiene
i poli stabili del regolatorecontinuo.
Come si può notare, l’immagine di S− sotto la trasformazione EI
non “riempie”il cerchio unitario, mentre questo accade per la
trasformazione TU; inoltre la tra-sformazione EA può trasformare
poli stabili del regolatore continuo in poli instabilidel
regolatore discreto. Per queste ragioni si preferisce usare la
trasformazione TUoppure la trasformazione EI.
39
-
�� ������ ��-1 -1-1
1 11
��(EA) (EI)(TU)
Figura B.5: Immagine sul piano complesso Z della trasformazione
(B.21) applicataal semi-piano sinistro S− per i tre casi EA, TU,
EI.
Trasformazione diretta di poli e zeri
Questo metodo, chiamato anche “hold equivalence”, è alternativo
a quello dellatrasformazione bilineare e si basa sulle
considerazioni seguenti.
Ricordiamo che l’obbiettivo è quello di trovare
un’approssimazione C∗(z) di C(s)in grado di soddisfare la
condizione che C∗(z) sia una funzione razionale in z. Se
co-nosciamo la C(s), possiamo ottenere direttamente la C∗(z)
imponendo che la rispostadel sistema discreto ad un gradino
discreto coincida con i campioni della risposta delsistema continuo
al gradino continuo. Per ottenere questa corrispondenza
occorreprocedere nel modo seguente:
1) calcolare la trasformata della risposta al gradino unitario
y(s) = C(s)/s;
2) antitrasformare y(s) per ottenere y(t);
3) campionare y(t) per ottenere y∗(k), quindi applicare a y∗(k)
la trasformata Zetaper ottenere y∗(z);
4) ricavare infine C∗(z) come rapporto tra y∗(z) e la
trasformata Zeta del gradinounitario u∗(z) =
z
z − 1 , ossia
C∗(z) = y∗(z)z − 1
z.
Questa procedura presenta due inconvenienti: in primo luogo è
difficilmente automa-tizzabile; in secondo luogo – e questa è una
caratteristica generale della trasformazioneda C(s) a C∗(z) – si
potrebbe verificare la “nascita” di zeri nella C∗(z) anche
quandoC(s) non ne ha.
Il problema della nascita degli zeri nella fdt del sistema a
segnali campionati nonverrà discusso qui e si rimanda a [1, Pagg.
533-535] per ulteriori approfondimenti.
La procedura per trasformare C(s) in C∗(z) può essere riassunta
come segue:
1) gli n poli di C(s) si trasformano negli n poli di C∗(z)
mediante la trasformazione(B.13);
40
-
2) il guadagno di C∗(z) obbedisce alle seguenti regole:
a) se C(s) è di tipo zero, allora il guadagno stazionario di
C∗(z) è uguale aquello di C(s), ossia
C∗(1) = C(0) (B.22)
b) se C(s) è di tipo ` 6= 0 e se abbiamo definito i guadagni
stazionari K e K∗nel modo seguente
K = lims→0
s`C(s); K∗ = limz→1
(z − 1
T
)`C∗(z)
allora vale la seguente relazione
K∗ = K (B.23)
3) Gli zeri di C∗(z) sono sempre in numero di m∗ = (n− 1). Se m
è il numero dizeri di C(s), nascono dal campionamento m′ = (n −m −
1) “nuovi” zeri. Glizeri di C∗(z) sono cos̀ı caratterizzati
a) Se C(s) possiede m zeri, questi si mappano in altrettanti
zeri di C∗(z),che tendono a z = 1; per T → 0 questi m zeri si
trovano applicando latrasformazione di campionamento z = esT ;
b) se l’eccesso poli-zeri di C(s) vale n − m > 1, allora
nascono altri m′ =n−m−1 zeri di C∗(z), dovuti al campionamento,
che, per T → 0, tendonoalle radici del polinomio Pn−m(z).
L’espressione di questo polinomio e dellesue radici per n−m = 1, .
. . , 4 sono riportate nella tabella seguente:
n−m Pn−m(z) valori degli zeri1 1 —2 z + 1 −1.003 z2 + 4z + 1
−0.268, −3.734 z3 + 11z2 + 11z + 1 −0.10, −1.00, −9.89
(B.24)
Come si vede, alcuni degli zeri di Pn−m(z) sono interni al
cerchio unitario, altri sonoesterni (non minima rotazione di
fase).
Ora possediamo tutti gli elementi per considerare il metodo di
trasformazionediretta di poli e zeri della C(s).
Abbiamo dunque la fdt C(s), con n poli e m zeri, e vogliamo
trovare una fdtdiscreta C∗(z) che la approssimi; procediamo in
questo modo:
1) fissiamo il guadagno stazionario di C∗(z) secondo la (B.22)
oppure la (B.23);
2) trasformiamo gli n poli di C(s) negli n poli di C∗(z) secondo
la trasformazionedi campionamento (B.13);
3) trasformiamo gli eventuali m zeri di C(s) negli zeri di C∗(z)
secondo la trasfor-mazione di campionamento (B.13);
4) se n−m > 1, aggiungiamo altri n−m− 1 zeri di campionamento
in corrispon-denza delle radici del polinomio Pn−m(z) presentato
nella tabella (B.24)
Talvolta si preferisce semplificare ulteriormente la definizione
degli zeridi campionamento, collocando tutti gli (n−m− 1) zeri nel
punto z = −1.
41
-
B.2.4 Sintesi diretta del controllore digitale
La sintesi diretta del controllore digitale implica che
l’impianto su cui si applica ilcontrollo venga discretizzato e
successivamente si proceda alla sintesi del controlloredigitale,
facendo riferimento a specifiche di progetto definite per sistemi
discreti. LaFigura B.6 mostra lo schema a blocchi dello stesso
sistema di Figura B.3, dove oraperò è stata messa in evidenza
quella parte dell’impianto a tempo discreto, denominataG∗(z), che
ha in ingresso il segnale di comando u∗(k) sintetizzato dal
controllore e inuscita il segnale campionato di misura y∗(k).
–
∗e u( )G s( )G s( )∗C z( )∗C z
∗r + y∗u
y∗y
ZOH
r
–
∗e u( )G s′( )∗C z( )∗C z
∗r +y∗u ∗y
ZOH
( )∗G z
Figura B.6: Schema a blocchi del sistema di controllo digitale
in cui si mette inevidenza la fdt discretizzata dell’impianto
G∗(z).
Ora questa G∗(z) viene considerata nello schema di Figura B.7
per procedere alprogetto mediante sintesi diretta a tempo
discreto.
–
∗e( )∗C z
∗r + ∗u ∗y( )∗G z
Figura B.7: Schema a blocchi del sistema di controllo digitale
derivato da quello inFigura B.6 che viene usato per la sintesi
diretta a tempo discreto.
Le specifiche per un progetto a tempo discreto non sono
qualitativamente di-verse da quelle che abbiamo elencato in queste
note per il progetto a tempo conti-nuo; ovviamente gli aspetti
algoritmici sono diversi, ma questi non verranno illustratiin alcun
modo; ancora una volta si rimanda ai testi indicati in Bibliografia
per gliapprofondimenti del caso.
42
-
Supponiamo ora di aver individuato, attraverso il
soddisfacimento delle specifiche,la funzione di trasferimento
equivalente ad anello chiuso
G∗eq(z) =N∗eq(z)D∗eq(z)
=N∗C(z)N
∗G(z)
D∗C(z)D∗G(z) + N
∗C(s)N
∗G(z)
,
Possiamo procedere con la tecnica dell’assegnazione dei poli
(pole-placement) checonsiste nel determinare il polinomio
caratteristico P ∗(z) desiderato per G∗eq(z), talecioè da avere le
sue radici là dove vogliamo che siano presenti i poli del sistema
adanello chiuso, e quindi di uguagliare quest’ultimo al polinomio
caratteristico simbolicodi G∗eq(z), ovvero
D∗C(z)D∗G(z) + N
∗C(z)N
∗G(z) = P
∗(z) (B.25)
Questa equazione prende il nome di equazione Diofantea per il
controllo. D∗C(z) eN∗C(z) sono le incognite del problema.
Dato un polinomio P ∗(z), questa equazione ammette una sola
soluzione se e solose i polinomi N∗G(z) e D
∗G(z) non hanno fattori comuni.
La soluzione si ottiene con un procedimento numerico basato
sull’inversione di unaparticolare matrice che contiene i
coefficienti dei polinomi D∗G(z) e N
∗G(z).
L’ordine m del controllore C∗(z) cos̀ı sintetizzato deve essere
almeno m = ν − 1,dove ν è l’ordine della fdt dell’impianto G∗(z).
Come si vede, se l’impianto ha ordineelevato, il metodo dà origine
a controllori che sono anch’essi di ordine elevato.
Infine va fatto osservare che il metodo sopra presentato genera
gli zeri in posizioniche l’utilizzatore non è in grado di
scegliere; se questo fatto costituisse un problema,si potrebbe
utilizzare una procedura detta di pole-zero placement, la quale
tuttavianon verrà descritta in queste note.
B.2.5 Periodo di campionamento e lunghezza della parola
Considerando la trasformazione di campionamento (B.13),
riportata qui per comodità
z = esT .
Osserviamo che per T → 0, i poli del sistema discretizzato si
addensano attorno az = 1; se il calcolo dell’esponenziale viene
eseguito in aritmetica finita, potrebbero in-sorgere imprecisioni
numeriche, tali da rendere indistinguibile un autovalore
dall’altro,ovvero per si 6= sj potremmo avere zi = zj .
La Figura B.8 riporta il grafico della differenza non
distinguibile tra due polivicini, quando si operi in virgola fissa
a 16 bit, per tre diversi valori del periodo dicampionamento T =
0.01, 0.005, 0.001s.
Si può notare che al diminuire del periodo T , la non
distinguibilità tra due policresce; ad esempio, per T = 1 ms, è
necessario che, due poli si e sj , compresi tra −10e −100, abbiano
differenza tale che |si − sj | > 15×10−3 per poter essere
distinguibili;per T = 10ms questa differenza varia solo tra
0.5×10−3 e 1.5×10−3.
Questo fatto conferma quanto detto precedentemente al Paragrafo
B.2.1 circal’opportunità di non aumentare senza ragione la
pulsazione di campionamento ωs,soprattutto in presenza di
processori con lunghezza di parola limitata.
43
-
100
101
102
103
10−6
10−5
10−4
10−3
10−2
10−1
polo (s−1)
diffe
renz
a no
n di
stig
uibi
le (
s−1 )
T=0.01 s T=0.005 s
T=0.001 s
Figura B.8: Caratteristiche di indistinguibilità numerica tra
due poli vicini, al variaredella loro posizione e del periodo di
campionamento T , per campionatori a parolafinita con Nb = 16.
B.2.6 Come ottenere l’algoritmo di controllo
Una volta progettato C∗(z), esso assumerà la forma indicata in
(B.2). È quindipossibile scrivere
C(z) =u∗(k)e∗(k)
=b0z
m + b1zm−1 + · · ·+ bm−1z + bmzn + a1zn−1 + · · ·+ an−1z + an .
(B.26)
Ricordiamo ancora una volta che l’operatore z opera sui campioni
nel modo seguente
z±`y(k) = y(k ± `).Sviluppando la (B.26), otteniamo
(zn + a1zn−1 + · · ·+ an−1z + an)u∗(k) = (b0zm + b1zm−1 + · · ·+
bm−1z + bm)e∗(k)da cui
znu∗(k) = −a1zn−1u∗(k)− · · · − an−1zu∗(k)− anu∗(k)+b0z
me∗(k) + b1zm−1e∗(k) + · · ·+ bm−1ze∗(k) + bme∗(k)e quindi
u∗(k + n) = −a1u∗(k + n− 1)− · · · − an−1u∗(k + 1)−
anu∗(k)+b0e
∗(k + m) + b1e∗(k + m− 1) + · · ·+ bm−1e∗(k + 1) + bme∗(k)
44
-
Poiché il controllore è invariante nel tempo, possiamo
applicare un ritardo comunepari a n campioni, ottenendo
finalmente
u∗(k) = −a1u∗(k − 1)− · · · − an−1u∗(k − n + 1)− anu∗(k − n)++
b0e∗(k − n + m) + b1e∗(k − n + m− 1) + · · ·
+ bm−1e∗(k − n + 1) + bme∗(k − n) (B.27)
Questa relazione ci permette di scrivere un algoritmo che
calcola il segnale di controlloal passo k, utilizzando misure o
comandi relativi a passi precedenti.
La realizzazione dell’algoritmo attraverso la formula (B.27),
benché corretta, nonè robusta dal punto di vista numerico;
piccole variazioni, dovute a troncamento oarrotondamento, delle
costanti ai e bj possono generare segnali u∗(k) anche moltodiversi.
Si raccomanda perciò di utilizzare la tecnica dello sviluppo in
fratti semplici,che invece gode della proprietà di essere
robusta