Embed Size (px)
Citation preview

LABORATORY OF BIOLOGICAL STRUCTURE MECHANICS
www.labsmech.polimi.it
Progettazione e sviluppo di un ortesi AFO Progettazione e sviluppo di un ortesi AFO (Ankle Foot Orthesis) innovativa in materiale (Ankle Foot Orthesis) innovativa in materiale compositocompositoMilano, 3 maggio 2010Milano, 3 maggio 2010
Tesi di laurea di: Matteo Zani matr. 711658
Relatore: Chiar.mo Prof. Tomaso Maria Tobia Villa
Co-relatore: Chiar.mo Ing. PhD Daniele Bonacini
2
1. Introduzione
2. Analisi delle performance funzionali ortesi in commercio
3. Definizione delle specifiche di progetto nuova ortesi AFO
Progettazione e sviluppo di un ortesi AFO innovativa in Progettazione e sviluppo di un ortesi AFO innovativa in materiale compositomateriale composito
Tomaso Villa– Clearwater Beach 2009
3. Definizione delle specifiche di progetto nuova ortesi AFO
4. Scelta delle geometrie e dei materiali
5. Validazione funzionale delle scelte progettuali
6. Validazione meccanica delle scelte progettuali
7. Conclusioni e sviluppi futuri

3
1. Introduzione: il ciclo del passo
Intervallo di tempo tra due contatti iniziali
successivi dello stesso piede
Ciclo del passo
Riferimento temporale in cui vengono descritti gli
eventi biomeccanici e l’attività muscolare correlata.
0-2% 10-30% 87-100%
Tomaso Villa– Clearwater Beach 2009
Attivazione muscolare
Quadricipite femoraleHamstrings
Tibiale anterioreGastrocnemio-soleo
0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Y
XINITIALCONTACT
MID STANCE
TOE OFF

4
Patologie morfologiche
Piede piatto:� insufficienza muscoli
cavizzanti
Piede cavo:� ipertono dei muscoli
cavizzanti.
Piede equino:
Disturbi del sistema nervoso
Paralisi cerebrale infantile:� alterazioni della funzione cerebrale prima che il
soggetto abbia completato il suo sviluppo.
Paralisi: diplegia, emiplegia, tetraplegia
Deficit del nervo SPE:� ipostenia muscoli anteriori e
laterali della gamba
SPE
1. Introduzione: patologie che causano deficit funzionali dell’arto inferiore
Tomaso Villa– Clearwater Beach 2009
Piede equino:� ipertono dei muscoli del
polpaccio
� camminata con andamento
falciante
Ginocchio valgo /varo:� disallineamento tra tratto
femorale e tibiale
� passo più ampio e un
traslamento laterale del
tronco.VALGO VARO
laterali della gamba
� deficit nella dorsiflessione edeversione del piede
Deficit dello SPI:� ipostenia muscoli posteriori
della gamba
� deficit nella plantarflessione
Neuropatia di Charcot Marie Tooth:� colpisce il Sistema nervoso centrale
� indebolimento e l’atrofia dei muscoli degli arti inferiori esuperiori.
SPI

5
Ortesi: “dispositivo esterno utilizzato al fine di modificare le caratteristiche strutturali o
funzionali dell' apparato neuro - muscolo - scheletrico” Organizzazione Internazionale degli Standard (ISO)
Classificazione ISO:
1. Introduzione: le ortesi
Tomaso Villa– Clearwater Beach 2009
FO - Foot Orthesis AFO Ankle Foot Orthesis KO Knee Orthesis
THKAFO - Trunk Hip Ankle Foot OrthesisKAFO - Knee Ankle Foot Orthesis HKAFO - Hip Knee Ankle Foot Orthesis

6
scelta della geometria
scelta del sistema di presa
scelta dei materiali
limitazione della plantarflessione (1)
mantenimento della naturale dorsiflessione (2)
contenimento medio laterale (3)
possibilità di contributo propulsivo
Specifiche funzionali dei tutori AFO
1. Introduzione: le ortesi AFO
Tomaso Villa– Clearwater Beach 2009
Analisi del mercato
AFO RIGIDE AFO ARTICOLATE AFO DINAMICHE
Presa posteriore
Presa anteriore
Presa posteriore Presa anteriore
7
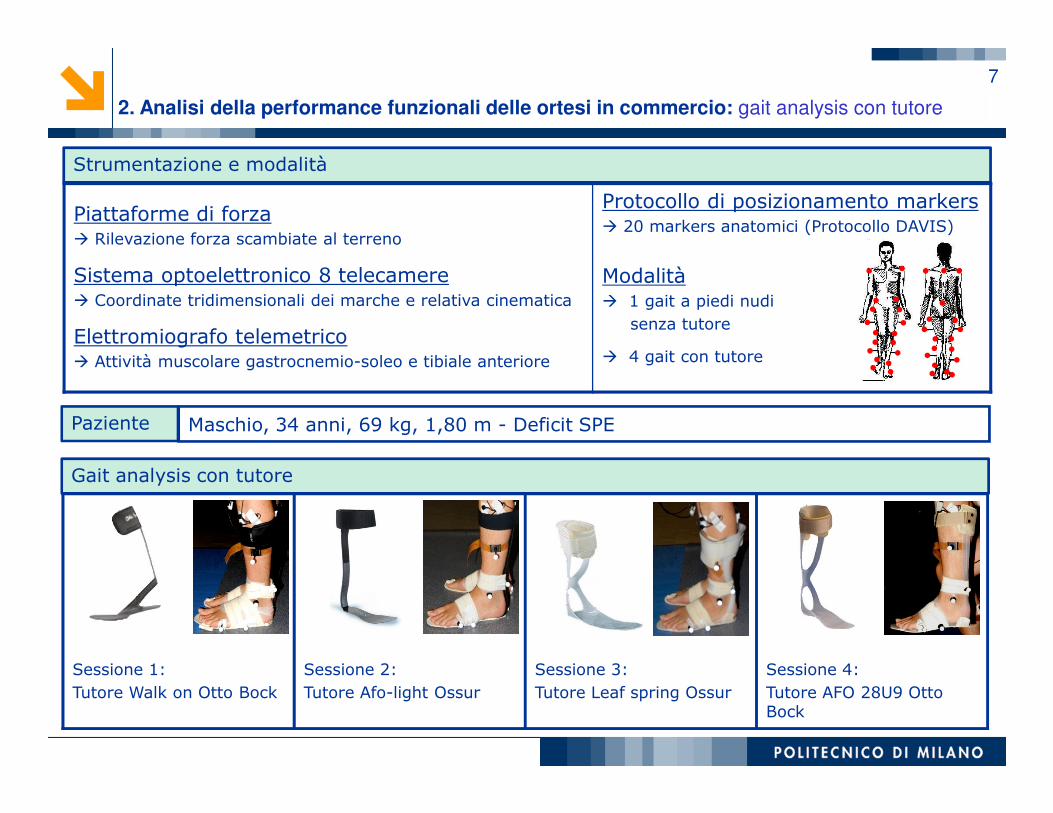
Strumentazione e modalità
2. Analisi della performance funzionali delle ortesi in commercio: gait analysis con tutore
Piattaforme di forza� Rilevazione forza scambiate al terreno
Sistema optoelettronico 8 telecamere� Coordinate tridimensionali dei marche e relativa cinematica
Elettromiografo telemetrico� Attività muscolare gastrocnemio-soleo e tibiale anteriore
Protocollo di posizionamento markers� 20 markers anatomici (Protocollo DAVIS)
Modalità� 1 gait a piedi nudi
senza tutore
� 4 gait con tutore
Tomaso Villa– Clearwater Beach 2009
Paziente Maschio, 34 anni, 69 kg, 1,80 m - Deficit SPE
Gait analysis con tutore
Sessione 1:
Tutore Walk on Otto Bock
Sessione 2:
Tutore Afo-light Ossur
Sessione 3:
Tutore Leaf spring Ossur
Sessione 4:
Tutore AFO 28U9 Otto Bock

8
3.c Modello biomeccanico
Fx ed Fy(% sul peso corporeo)
Posizione relativa tra i due segmenti corporei riferimento alla linea di terra
Tomaso Villa– Clearwater Beach 2009
Initial contact
Mid stance
Toe off
da letteratura
calcolati

9
Cinematica: traiettorie marker condilo femorale ginocchio
Tempo [sec]
Co
ord
inata
y [m
]
0,7 1,40
Piedi nudi:sollevamento marcatodel ginocchio percompensazione deldeficit dorsiflessorio
Gait con tutore:
(senza tutore)
2. Analisi della performance funzionali delle ortesi in commercio: gait analysis – analisi dati
(*)
Tomaso Villa– Clearwater Beach 2009
Gait con tutore
Riduzione delle coordinata verticale del ginocchio
Capacità del tutore di sostenere l’avampiede in fase di volo
Y
Xavanzamento
Co
ord
inata
y [m
]
�ginocchio più radente al terreno
� andamento paragonabile all’arto sano
Coordinata x [m]
(*) Tutore Afo Light Ossur considerato rappresentativo per migliore prestazione

10
Dinamica gait con tutore: forza verticale Fy
IC MS tutore
MS sano
TO sano
TO tutore
IC MS tutore
MS sano
TO sano
TO tutore
Fo
rza
[%
pe
so
co
rpo
reo
]
Arto con TUTORE (*)
Arto sano
Normalità
2. Analisi della performance funzionali delle ortesi in commercio: gait analysis – analisi dati
ICMS tutore
MS sano MS tutore
MS sano
Tomaso Villa– Clearwater Beach 2009
% fase di stance
Fo
rza
[%
pe
so
co
rpo
reo
]
Ritardo raggiungimento primo picco (accettazione peso corporeo):
� mancanza di stabilità antero – posteriore� caricamento parziale del tutore
Range Forza 1°picco -plateau:
� ammortizzazione nella fase successiva al mid stance
Propulsione in senso verticale:
� Valore di forza corrispondente al 2°
picco
(*) Tutore Walk on Otto Bock considerato rappresentativo per maggiori limiti

Dinamica gait con tutore: forza orizzontale Fx
11
IC MS tutore
MS sano
TO sano
TO tutore
IC MS tutore
MS sano
TO sano
TO tutore
Fo
rza
[%
pe
so
co
rpo
reo
]
2
Arto con TUTORE Otto Bock
Arto con TUTORE Ossur
Normalità
ICMS tutore
MS sano MS tutore
MS sano
2. Analisi della performance funzionali delle ortesi in commercio: gait analysis – analisi dati
Tomaso Villa– Clearwater Beach 2009
Fo
rza
[%
pe
so
co
rpo
reo
]
% fase di stance
Tratto con Forza negativa:
� decelerazione dell’arto� assorbimento di Energia (area 1)
Tratto con Forza positiva:
� accelerazione dell’arto� rilascio di energia accumulata nella
prima fase (area 2)
1 Propulsione in senso orizzontale:
� Valore di forza corrispondente al 2°
picco

12
Attività muscolare: tracciato EMG
GASTROCNEMIO-SOLEO� fisiologico
TIBIALE ANTERIORE � deficit
Gastrocnemio-soleo Tibiale anteriore
Tibiale anteriore Gastrocnemio-soleoNormalità segnale
acquisito
2. Analisi della performance funzionali delle ortesi in commercio: gait analysis – analisi dati
Tomaso Villa– Clearwater Beach 2009
Come presumibile a prioriil tutore non modificain nessun modol’attività muscolare delsoggetto
Gastrocnemio-soleo Tibiale anterioreTibiale anteriore Gastrocnemio-soleo

13
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
Cinematica Cammino fluido e traiettoriaginocchio rasente al terreno
Geometria posteriore + 2 punti di presa
Fyplateau
Capacità ammortizzante
� 2 punti di presa: prossimale e 2/3 distale
� buona elasticità in dorsi / plantarflessione
Propulsione antero-posteriore
Elevata efficienza energetica
Stratificazione del materiale composito eE rilasciata / E assorbita
3. Definizione delle specifiche di progetto nuova ortesi AFO
Tomaso Villa– Clearwater Beach 2009
Fx
Stratificazione del materiale composito esoletta a geometria innovativa
Fy - Fx
2°picco
Migliorare bilanciamento tra componente verticale e
orizzontale
� scelta della geometria
� scelta dei materiali compositi
Contatto con la cute
Compatibilità biologica Materiali atossici e anallergici
� Etivinilacetato e Plastazote
Affidabilità Affidabilità strutturale e funzionale
Scelta della geometria e dei materiali

14
Geometria innovativa:
retropiede: inclinazione di 3° per 55% lunghezza
tratto rettilineo per 25 % della lunghezza
raggiatura di 124 mm all’estremità anteriore.
Disegno CAD
Geometria del braccio posteriore
Geometria della soletta
4.a Scelta delle geometrie
Tomaso Villa– Clearwater Beach 2009
Geometria del braccio posteriore
Presa tibiale ad 1/3 dell’altezza totale:
� garantisce la stabilità della caviglia� graduale accettazione del carico.
Apertura laterale delle fasce di presa:
� contenimento a carico del materialecomposito
Contributo propulsivo

15
Twill
Materiali
Tessuti prepreg con resina epossidica
Stratificazione
3 differenti zone
tessuto unidirezionale incorrispondenza dell’asse neutro � strutturale
angolazione graduale delle fibre per distribuzione omogenea dei carichi
4.b Scelta dei materiali, stratificazione, laminazione
Unidirezionale
Tomaso Villa– Clearwater Beach 2009
Processo di fabbricazionediversi spessori, differenti elasticità

16
5. Validazione funzionale delle scelte progettuali
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
Cinematica Cammino fluido e traiettoria ginocchio rasente al terreno
Geometria posteriore + 2 punti di presa
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
Cinematica Cammino fluido e traiettoria ginocchio rasente al terreno
Geometria posteriore + 2 punti di presa
Cammino fluido e traiettoria
Tempo [sec]Tempo [sec]
Tomaso Villa– Clearwater Beach 2009
Coordinata x [m]Coordinata x [m]
Co
ord
inata
y [m
]C
oo
rdin
ata
y [m
]
traiettoria ginocchio rasente al
terreno

16
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALIPARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
Fyplateau
Capacità ammortizzante � 2 punti di presa: prossimale e 2/3 distale
� buona elasticità in dorsi / plantarflessione
Fyplateau
Capacità ammortizzante � 2 punti di presa: prossimale e 2/3 distale
� buona elasticità in dorsi / plantarflessione
5. Validazione funzionale delle scelte progettuali
Fo
rza
ve
rtic
ale
Fy
[% p
eso
co
rpo
reo
]F
orz
a v
ert
ica
le F
y
[% p
eso
co
rpo
reo
]
buona capacità ammortizzante
� maggiore rispetto tutore
Tomaso Villa– Clearwater Beach 2009
Fo
rza
ve
rtic
ale
Fy
[% p
eso
co
rpo
reo
]F
orz
a v
ert
ica
le F
y
[% p
eso
co
rpo
reo
]
% ciclo del passo % ciclo del passo –– fase di stancefase di stance
� maggiore rispetto tutore Otto Bock
� paragonabile alla normalità

17
Propulsione antero-posteriore
Fx
Elevata efficienza energetica
Stratificazione del materiale composito e soletta a geometria innovativa
Propulsione antero-posteriore
Fx
Elevata efficienza energetica
Stratificazione del materiale composito e soletta a geometria innovativa
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALIPARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
E rilasciata / E assorbita
5. Validazione funzionale delle scelte progettuali
aumento energia immagazzinata� maggiore assorbimento rispetto blu
Fo
rza
orizzo
nta
le F
x
[% p
eso
co
rpo
reo
]F
orz
a o
rizzo
nta
le F
x
[% p
eso
co
rpo
reo
]
Tomaso Villa– Clearwater Beach 2009
� maggiore assorbimento rispetto blu
capacità propulsiva orizzontale � propulsione fino all’ultimo
istante di stance
Fo
rza
orizzo
nta
le F
x
[% p
eso
co
rpo
reo
]F
orz
a o
rizzo
nta
le F
x
[% p
eso
co
rpo
reo
]
% ciclo del passo % ciclo del passo –– fase di stancefase di stance

18
5. Validazione funzionale delle scelte progettuali
Fy - Fx
2°picco
Migliorare bilanciamento tra componente verticale e
orizzontale
� scelta della geometria
� scelta dei materiali compositi
Fy - Fx
2°picco
Migliorare bilanciamento tra componente verticale e
orizzontale
� scelta della geometria
� scelta dei materiali compositi
PARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALIPARAMETRO SPECIFICHE di PROGETTO SCELTE PROGETTUALI
Forz
a v
ert
icale
Fy
[% p
eso c
orp
ore
o]
Forz
a v
ert
icale
Fy
[% p
eso c
orp
ore
o]
Forz
a o
rizzonta
le F
x [
% p
eso c
orp
ore
o]
Forz
a o
rizzonta
le F
x [
% p
eso c
orp
ore
o]
Tomaso Villa– Clearwater Beach 2009
riduzione della componente propulsiva verticale
buon bilanciamento tra le componenti propulsive
Forz
a v
ert
icale
Fy
[% p
eso c
orp
ore
o]
Forz
a v
ert
icale
Fy
[% p
eso c
orp
ore
o]
% ciclo del passo % ciclo del passo –– fase di stancefase di stance
Forz
a o
rizzonta
le F
x [
% p
eso c
orp
ore
o]
Forz
a o
rizzonta
le F
x [
% p
eso c
orp
ore
o]
% ciclo del passo % ciclo del passo –– fase di stancefase di stance

19
Afferraggio
attuatore
Vincolo: pattino
(2 gdv)
Vincolo:
cerniera (2 gdv)
Vincolo:
cerniera (2 gdl)
Vincolo:
incastro (3 gdl)
Obiettivo: sollecitare l’ortesi in dorsiflessione e valutare carico di rottura
Letteratura � normalità: 20° di dorsiflessione 15° in plantarflessione
Posizione di partenza: angolo tra braccio posteriore e soletta pari a 90°.
Controllo di spostamento
Rottura � avvenuta a 225N con uno spostamento pari ad 68 mm in corrispondenza di una quota a 150 mm dal tallone
Curva Forza-deformazione
6. Validazione meccanica delle scelte progettuali
Tomaso Villa– Clearwater Beach 2009
incastro (3 gdl)
La struttura è composta da 3 aste vincolate mediante 2 cerniere, un pattino e un incastro.
Curva Forza-deformazione
0
25
50
75
100
125
150
175
200
225
250
0 2 4 6 8 101214161820222426283032343638404244464850525456586062646668707274
Deformazioni (mm)
Fo
rza
ap
plic
ata
(N
)
Spostamento [mm]
Forz
a a
pplic
ata
[N
]

20
Risultati validazione funzionale
riduzione della compensazione ginocchio
Risultati validazione strutturale
7. Conclusioni e sviluppi futuri
Tomaso Villa– Clearwater Beach 2009
riduzione della compensazione ginocchio
maggiore capacità di ammortizzazione
miglior bilanciamento tra componente propulsiva orizzontale e verticale
buona flessibilità
carico di rottura adeguato
Sviluppi futuri
test di resistenza a meccanica a fatica
diversificazione della gamma di prodotto: utilizzo di una metodologia di progettazione FEM per l’ottimizzazione della stratificazione.
possibile inserimento tra le pelli in fase di laminazione di tessuto poliestere con resina e catalizzatore particolari che conferiscano al pezzo maggiore flessibilità, elasticità ed efficienza propulsiva.





























