Embed Size (px)
Citation preview
Profº Ms.VALTER BEZERRA DANTAS (Física 21/12/2008Estática
Equilíbrio dos Sistemas de forças(Aplicados ao ponto e aos sólidos)
IntroduçãoDentre todos os fenômenos físicos, os do movimento, pela sua simplicidade, são os que mais se destacam. Além de mais simples, os fenômenos do movimento têm importância fundamental porque servem de explicação a inúmeros outros: o calor, o som e a própria luz são conseqüências de movimentos 'ocultos' à nossa percepção. A parte da Física que estuda o movimento e suas causas chama-se Mecânica. Didaticamente, reserva-se a denominação Cinemática, para o estudo dos movimentos e Dinâmica, para o estudo de suas causas.
Um caso particular de movimento é o repouso — movimento nulo. Há repouso quando os agentes causadores do movimento se compensam ou equilibram. Daí se dizer que um corpo em repouso está em equilíbrio. A parte da Mecânica que estuda as condições em que há equilíbrio chama-se Estática.Segundo o estado de agregação da matéria (no corpo em estudo), variam as condições de equilíbrio, e temos: a estática dos sólidos, dos líquidos e a dos gases.
A Estática, deixando um pouco de lado o rigor acadêmico, pode ser desenvolvida totalmente à parte da Dinâmica. É o que propomos nesse Resumo.
1. Noção elementar de forçaEssa noção está associada ao esforço muscular, no ato de empurrar ou puxar um objeto.
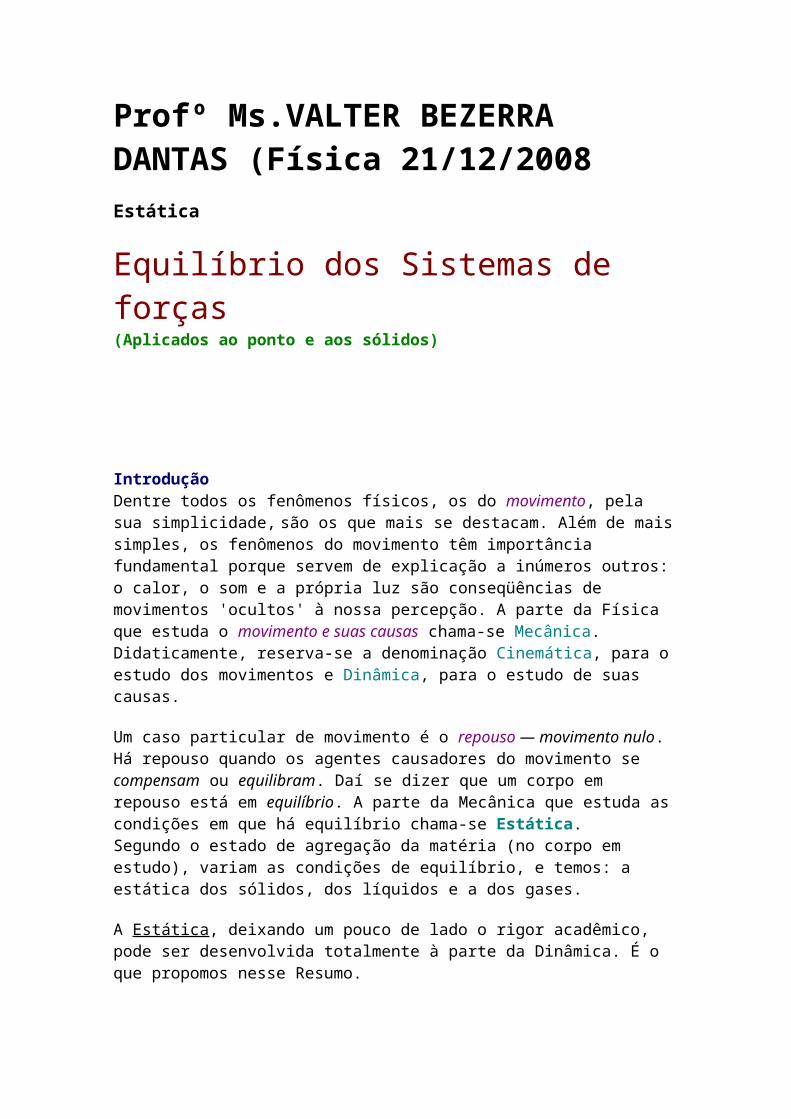
2. Noção física de forçaNa superfície da Terra, os corpos tendem a cair, isto é, a mover-se para níveis cada vez mais baixo. Este fenômeno é devido a uma ação atrativa exercida pela Terra denominada gravidade. Para especificar quantitativamente esta atração, pode-se medir a distensão de uma mola helicoidal à qual se suspende o corpo. É o que fazem os peixeiros com o dinamômetro ou balança de mola.Verifica-se então (pela medida), que a intensidade dessa ação local é proporcional à quantidade de matéria do corpo, isto é, pondo-se sobre o
gancho do dinamômetro uma porção duas vezes maior que a anterior, se obtém um deslocamento duplo do indicador da balança de mola.Força é o agente físico, de características vetoriais, responsável pelas deformações dos corpos (conceito estático) ou pela modificação de seus estados de repouso ou movimento (conceito dinâmico).
Em particular, a força exercida pela Terra sobre um corpo, é denominada peso do corpo. Para maiores detalhes sobre a noção de peso recomendamos a leitura: Uma aventura em pensamento (o peso) .
3. Classificação das forças quanto à naturezaQuanto à natureza do agente que a determina, classificamos em:
a) força muscular - (pela mão);b) força gravitacional - (força peso);c) força magnética - (pelos ímãs e eletroímãs);d) força eletrostática - (pelas cargas elétricas em repouso);e) força eletromagnética - (pelas correntes elétricas);f) força elástica - (pelas molas e fluidos sob pressão);g) etc.
4. Medida estática de forçasFaz-se através dos critérios de igualdade e multiplicidade de intensidades de forças;
a) critério de igualdade - Duas forças F1 e F2 têm intensidades iguais (e escreve-se F1 = F2), quando aplicadas sucessivamente em uma mola (padrão), produzem deformações iguais.b) critério de multiplicidade - Uma força F1 tem intensidade n vezes a intensidade de outra força F2 (e escreve-se F1 = n.F2), quando a deformação produzida numa mola, pela primeira, for n vezes superior à deformação produzida pela segunda, na mesma mola.
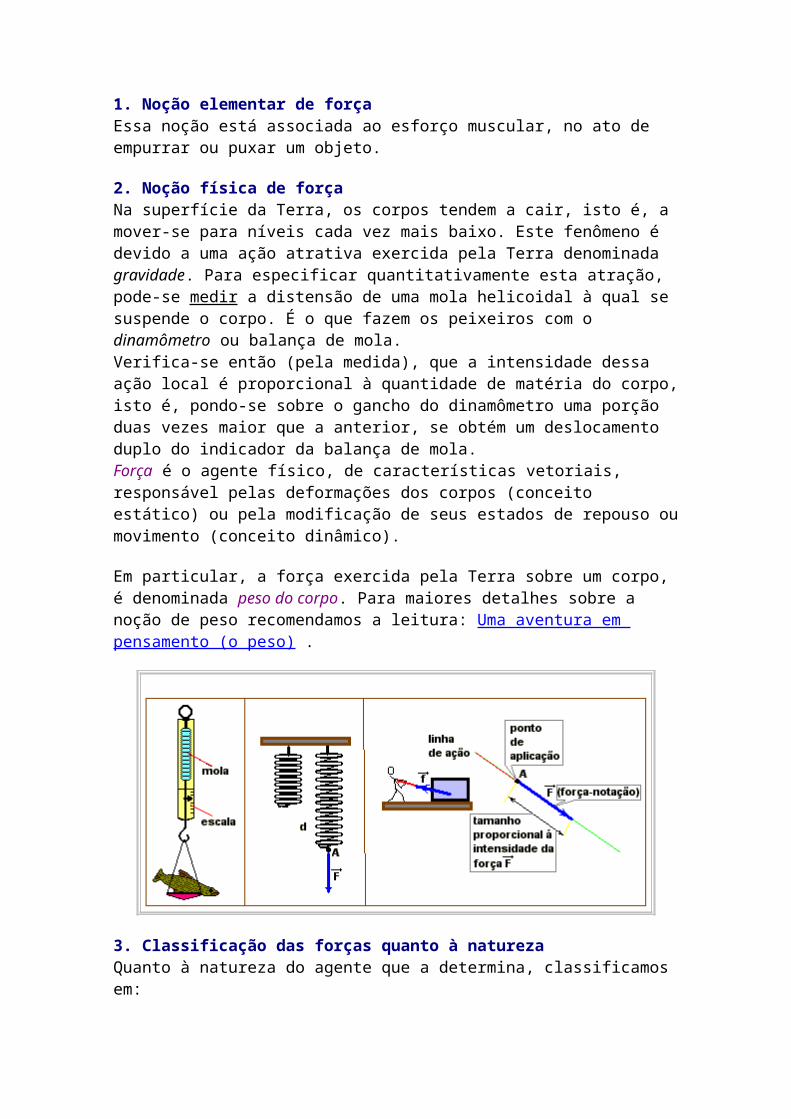
5. Lei de HookePara deformações elásticas, enuncia-se: É constante a razão entre a intensidade F da força aplicada numa mola e a deformação x que ela
experimenta; a constante de proporcionalidade k é uma característica da mola e denomina-se constante elástica da mola; simbolicamente:
6. Interação de corposCorpos interagem (e suas interações traduzem-se por forças) em função da(s) propriedades que transportam (massa, carga elétrica, massa magnética etc.) ou por seus mútuos contatos; diferenciamos:
a) Forças de "ação à distância" (modificação do espaço) - são forças de campo, nascidas em função da propriedade que transportam.
b) Forças de contato - são as forças nascidas do mútuo contato entre os corpos.
7. Princípio da ação e reaçãoQuer a interação entre dois corpos se dê "à distância" ou por contato, as forças de interação obedecem ao princípio da ação e reação; essas forças agem 'simultaneamente', uma em cada corpo, têm mesma direção, têm mesma intensidade e sentidos opostos; indica-se:

8. Diagrama vetorial associado - a um ponto material ou a um sólido (sistema rígido de pontos), é a representação pictórica das forças de campo e/ou de contato que nele agem. Numa montagem, deve-se isolar cada um dos componentes e substituir suas interações por forças (suas representações):
Identificando os pares ação/reação:
(1) - ação à distância da Terra sobre a esfera - seu peso P;(2) - ação à distância da esfera sobre a Terra - a reação -P;(3) - ação por contato da parede sobre a esfera - a ação N;(4) - ação por contato da esfera sobre a parede - a reação -N;(5) - ação por contato do fio sobre a esfera - a ação T;(6) - ação por contato da esfera sobre o fio - a reação -T;(7) - ação por contato da parede sobre o fio - a ação T';(8) - ação por contato do fio sobre a parede - a reação -T'.
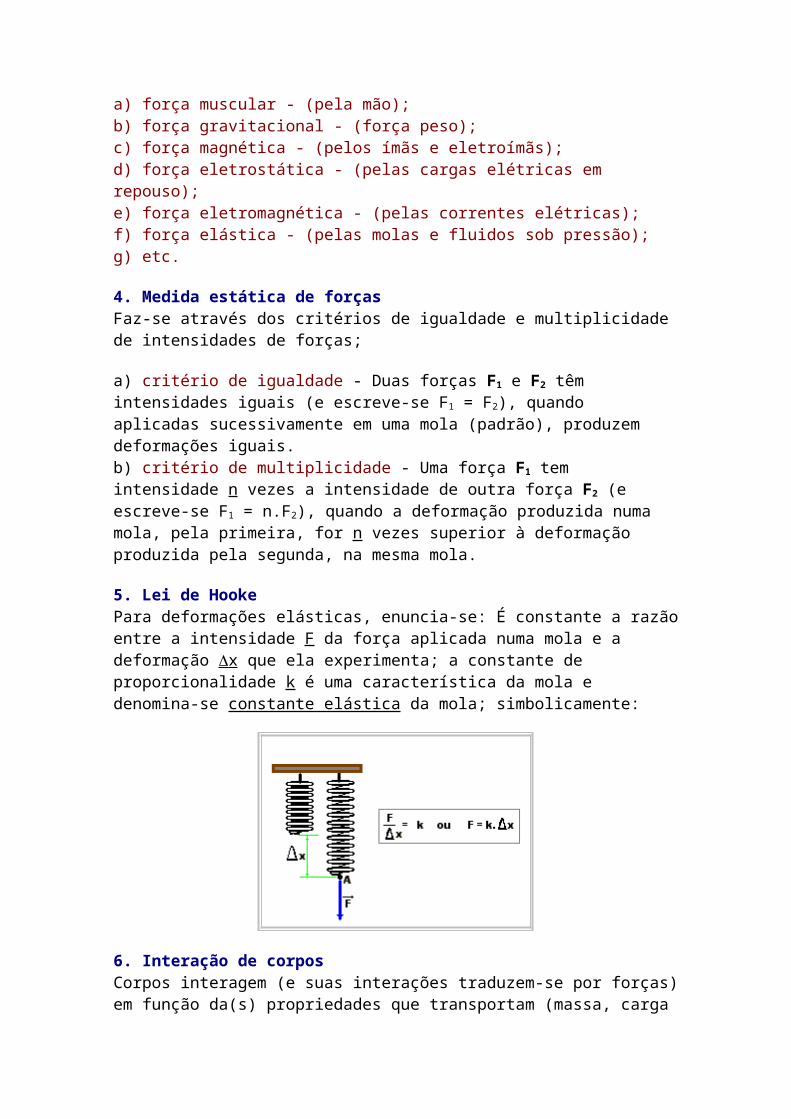
9. Sistema de forçasA interação de um corpo C, com vários outros, determina em C (observado) o aparecimento de um conjunto de forças ('à distância' e/ou por contato), denominado sistema de forças; escreve-se:
Essas forças, agentes em C, podem ser das mais variadasnaturezas: gravitacionais, magnéticas, elétricas, contato etc.
S = {(F1,A1),(F2,A2),…,(Fn,An)} = {(Fi,Ai)} i = 1, 2, …, n.

10. Classificação dos Sistemas de forças
| coplanar (concorrente, paralelo, qualquer) Sistema <
| espacial (concorrente, paralelo, qualquer)
11. Resultante das forças de um sistema
Como vetores livres, existe e é única a força R = Fi , denominada Resultante; as Fi forças são as componentes.
12. Determinação da resultante de um sistema de forças coplanares e concorrentes:
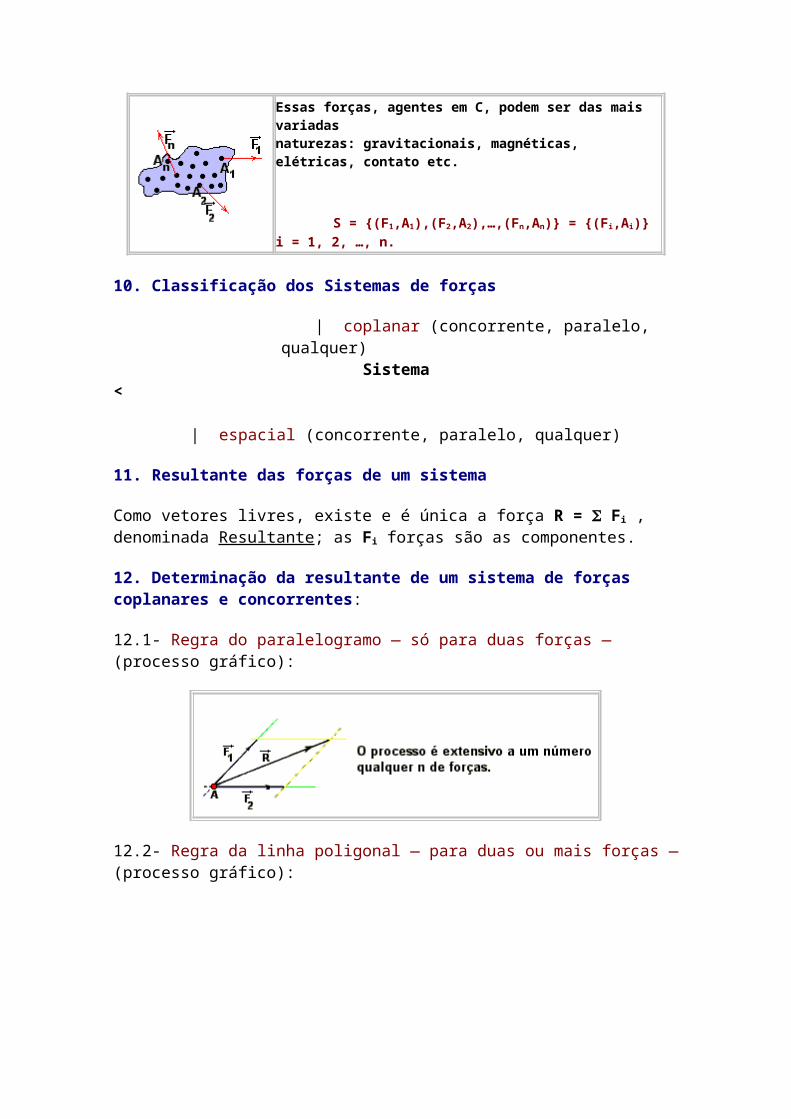
12.1- Regra do paralelogramo — só para duas forças — (processo gráfico):
12.2- Regra da linha poligonal — para duas ou mais forças — (processo gráfico):
12.3- Processo trigonométrico — só para duas forças —:
12.4- Processo analítico — para duas ou mais forças —:
13. Resultante de um sistema de forças coplanares e paralelas:
13.1- Mesmo sentido:
13.2- Sentidos opostos (F1 F2):
13.3- Sentidos opostos (F1 = F2):

14. Equilíbrio do sistema de forças aplicado a um ponto material … IMPORTANTE!!!
Condição necessária e suficiente para que o sistema de forças aplicado a um ponto material esteja em equilíbrio é que seja nula a resultante desse sistema.A condição R = F1 + F2 + … + Fn = Fi = 0 pode ser verificada através:
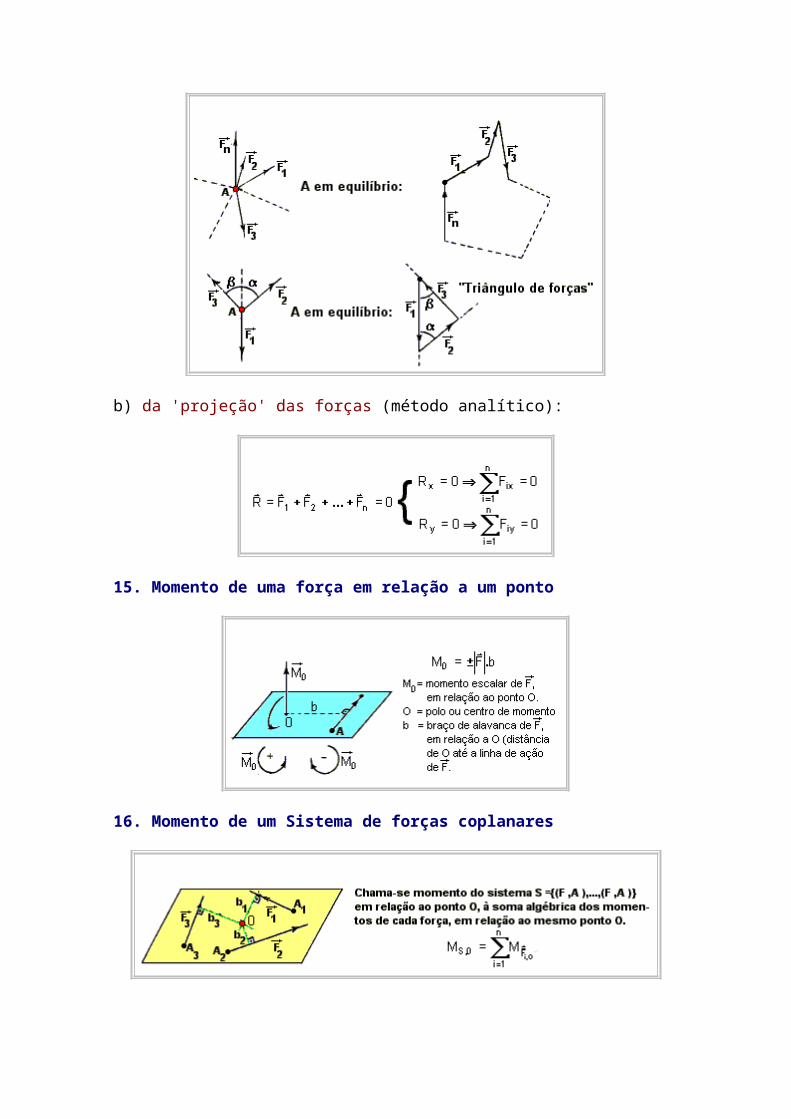
a) do polígono de forças - que deve resultar "fechado".
b) da 'projeção' das forças (método analítico):
15. Momento de uma força em relação a um ponto

16. Momento de um Sistema de forças coplanares
17. Teorema de Varignon - Se R é a resultante do sistema de forças S, vale:
"O momento da resultante de um sistema de forças em relação a um ponto (pólo) é igual ao momento do sistema ou seja, a soma algébrica dos momentos de todas as forças componentes, em relação ao mesmo pólo O.
18. Momento de um binário
19. Equilíbrio do Sistema de forças aplicado a um sólido - Operações Elementares IMPORTANTE !
19.1- Operação elementar1 Adição/Subtração de Sistemas Equivalentes a Zero - o efeito de um sistema de forças aplicadas a um sólido não se modifica se acrescentarmos ou subtrairmos nesse sistema um ou mais sistemas parciais de forças equivalentes a zero:
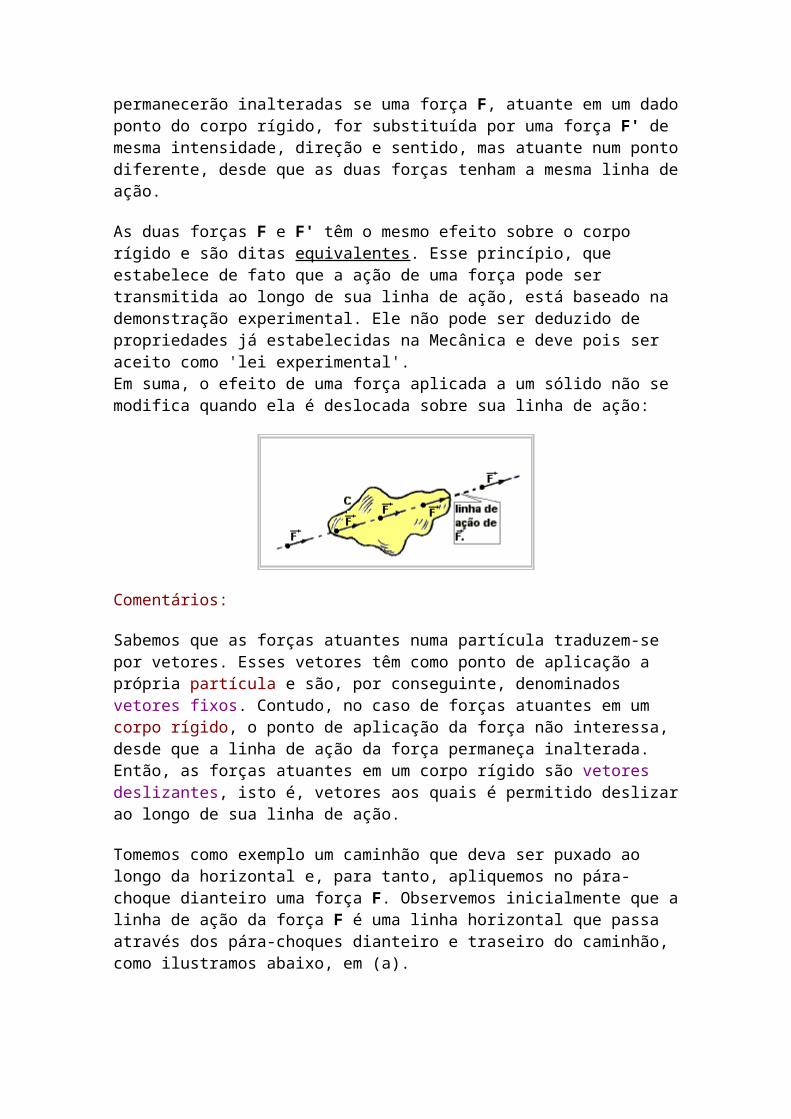
19.2- Operação elementar 2 Princípio da Transmissibilidade - O princípio da transmissibilidade estabelece que as condições de equilíbrio (ou de movimento) de um corpo rígido permanecerão inalteradas se uma força F, atuante em um dado ponto do corpo rígido, for substituída por uma força F' de mesma intensidade, direção e sentido, mas atuante num ponto diferente, desde que as duas forças tenham a mesma linha de ação.
As duas forças F e F' têm o mesmo efeito sobre o corpo rígido e são ditas equivalentes. Esse princípio, que estabelece de fato que a ação de uma força pode ser transmitida ao longo de sua linha de ação, está baseado na demonstração experimental. Ele não pode ser deduzido de propriedades já estabelecidas na Mecânica e deve pois ser aceito como 'lei experimental'.Em suma, o efeito de uma força aplicada a um sólido não se modifica quando ela é deslocada sobre sua linha de ação:
Comentários:
Sabemos que as forças atuantes numa partícula traduzem-se por vetores. Esses vetores têm como ponto de aplicação a própria partícula e são, por conseguinte, denominados vetores fixos. Contudo, no caso de forças atuantes em um corpo rígido, o ponto de aplicação da força não interessa, desde que a linha de ação da força permaneça inalterada. Então, as forças atuantes em um corpo rígido são vetores deslizantes, isto é, vetores aos quais é permitido deslizar ao longo de sua linha de ação.
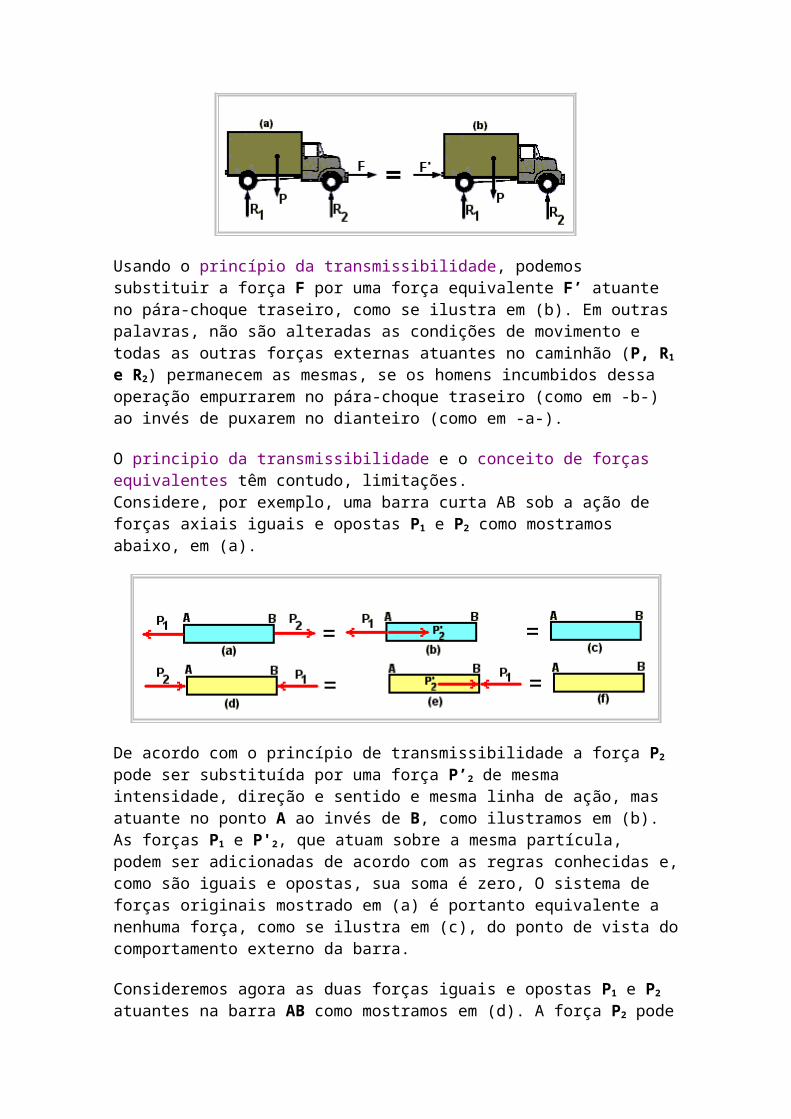
Tomemos como exemplo um caminhão que deva ser puxado ao longo da horizontal e, para tanto, apliquemos no pára-choque dianteiro uma força F. Observemos inicialmente que a linha de ação da força F é uma linha horizontal que passa através dos pára-choques dianteiro e traseiro do caminhão, como ilustramos abaixo, em (a).

Usando o princípio da transmissibilidade, podemos substituir a força F por uma força equivalente F’ atuante no pára-choque traseiro, como se ilustra em (b). Em outras palavras, não são alteradas as condições de movimento e todas as outras forças externas atuantes no caminhão (P, R1 e R2) permanecem as mesmas, se os homens incumbidos dessa operação empurrarem no pára-choque traseiro (como em -b-) ao invés de puxarem no dianteiro (como em -a-).
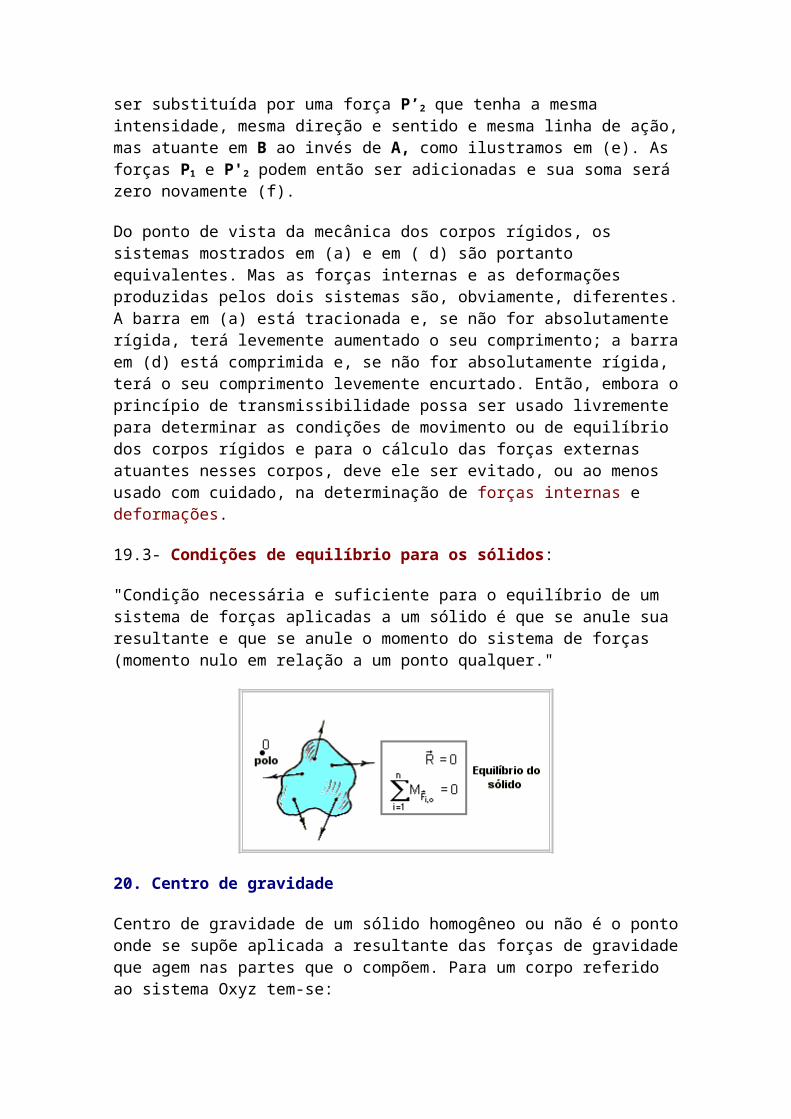
O principio da transmissibilidade e o conceito de forças equivalentes têm contudo, limitações. Considere, por exemplo, uma barra curta AB sob a ação de forças axiais iguais e opostas P1 e P2 como mostramos abaixo, em (a).
De acordo com o princípio de transmissibilidade a força P2 pode ser substituída por uma força P’2 de mesma intensidade, direção e sentido e mesma linha de ação, mas atuante no ponto A ao invés de B, como ilustramos em (b). As forças P1 e P'2, que atuam sobre a mesma partícula, podem ser adicionadas de acordo com as regras conhecidas e, como são iguais e opostas, sua soma é zero, O sistema de forças originais mostrado em (a) é portanto equivalente a nenhuma força, como se ilustra em (c), do ponto de vista do comportamento externo da barra.
Consideremos agora as duas forças iguais e opostas P1 e P2 atuantes na barra AB como mostramos em (d). A força P2 pode ser substituída por uma força P’2 que tenha a mesma intensidade, mesma direção e sentido e mesma linha de ação, mas atuante em B ao invés de A, como ilustramos em (e). As forças P1 e P'2 podem então ser adicionadas e sua soma será zero novamente (f).
Do ponto de vista da mecânica dos corpos rígidos, os sistemas mostrados em (a) e em ( d) são portanto equivalentes. Mas as forças internas e as deformações produzidas pelos dois sistemas são, obviamente, diferentes. A barra em (a) está tracionada e, se não for absolutamente rígida, terá levemente aumentado o seu comprimento; a barra em (d) está comprimida e, se não for
absolutamente rígida, terá o seu comprimento levemente encurtado. Então, embora o princípio de transmissibilidade possa ser usado livremente para determinar as condições de movimento ou de equilíbrio dos corpos rígidos e para o cálculo das forças externas atuantes nesses corpos, deve ele ser evitado, ou ao menos usado com cuidado, na determinação de forças internas e deformações.
19.3- Condições de equilíbrio para os sólidos:
"Condição necessária e suficiente para o equilíbrio de um sistema de forças aplicadas a um sólido é que se anule sua resultante e que se anule o momento do sistema de forças (momento nulo em relação a um ponto qualquer."
20. Centro de gravidade
Centro de gravidade de um sólido homogêneo ou não é o ponto onde se supõe aplicada a resultante das forças de gravidade que agem nas partes que o compõem. Para um corpo referido ao sistema Oxyz tem-se:
Máquinas Simples
Conceito de Máquina SimplesA palavra máquina desperta a imediata lembrança de um mecanismo complicado pois nos leva a pensar em algo como: a locomotiva de uma estrada de ferro, um motor de automóvel, a máquina de costura, de escrever, de lavar roupa etc. Toda máquina, porém, por mais complexa que nos pareça, não passa de combinações inteligentes de umas poucas peças isoladas, as quais são denominadas por máquinas simples. Fisicamente não passam de duas, a saber, a alavanca e o plano inclinado. Historicamente citaríamos a existência de quatro: alavanca, polia, plano inclinado e roda/eixo. Sob o ponto de vista do equacionamento, as polias e as rodas acopladas em seus eixos, podem ser
estudadas como convenientes associações de alavancas. Manteremos o ponto de vista histórico.
Toda máquina simples é um dispositivo, tecnicamente uma única peça, capaz de alterar uma força (seja em intensidade e/ou direção e/ou sentido) com o intuito de ajudar o homem a cumprir uma determinada tarefa com um mínimo de esforço muscular. De modo geral, o objetivo da máquina é multiplicar a intensidade de uma força. Se um homem não consegue, por si só, levantar um automóvel de peso 2 000 kgf (2 toneladas- força), uma máquina poderá ajudá-lo a fazer isso.A idéia central é portanto a seguinte: o operador aplica na máquina uma determinada força (em geral de pouca intensidade, pois resulta de seu esforço muscular e, na maioria dos casos, no máximo igual a seu peso) que indicaremos por Fa — força aplicada na máquina pelo operador — e a máquina, devidamente apoiada em algum lugar, o qual lhe aplica a força N — força que o apoio aplica na máquina — transmitirá para a carga (aquilo que caracteriza a tarefa do operador) a força Ft — força que a máquina aplica na carga –, resultado de sua função. Ilustremos isso:
Destaquemos que 'nenhuma máquina funcionará se não estiver devidamente apoiada' e, essa força (N) que o apoio aplica nela fará parte integrante de sua condição de equilíbrio. Além de N, agem na máquina mais duas forças, aquela aplicada pelo operador (Fa) e a reação á força transmitida (- Ft). Fisicamente a máquina estará 'em equilíbrio' (estático ou dinâmico) quando for nula a resultante e o momento resultante dessas três forças, N, Fa e - Ft , em relação a um ponto arbitrário. Para efeito de estudo as forças Fa e - Ft serão indicadas por F e R, respectivamente. Quando ás denominações, a Fa = F poderá assumir os nomes — força aplicada, força potente, potência e força motora, enquanto que a - Ft = R poderá receber os nomes — força resistente, resistência, força transmitida (ou ainda, carga, e indicada por Q). Lembrar que, em intensidade, - Ft e Ft são iguais. As equações que resolvem o equilíbrio das máquinas (ou seja, do sistema de forças que nela agem) são, portanto:
Vantagem Mecânica de uma máquina simplesDada uma máquina simples em operação, devemos desenvolver um conceito
que exprima sua eficiência, ou seja, um fator que indique por quanto ela multiplica a intensidade da força nela aplicada e retransmite para a carga. Para toda máquina simples (ou mesmo para quaisquer associação delas), a razão entre a intensidade da força transmitida pela máquina à carga e a intensidade da força aplicada na máquina, pelo operador (ou outra máquina) recebe a denominação de vantagem mecânica (VM). Em outras palavras, é o número pelo qual deve ser multiplicada a intensidade da força aplicada para se obter a intensidade de força que a máquina transmite para a carga.
Como se observa, a VM é grandeza adimensional. Assim, se VM = 4 é a vantagem mecânica de uma dada máquina simples, isto significa que, se você aplicar-lhe uma força de 10 unidades, a máquina transmitirá para a carga (aquilo que você quer levantar, empurrar, arrastar, puxar, apertar, rasgar, cortar etc.) uma força de 40 unidades.
Trabalho nas máquinas simplesEnquanto as máquinas 'trabalham', ou seja, enquanto as forças F e R efetuam deslocamentos em seus pontos de aplicação, haverá transferência ou transformação de energia mecânica. O trabalho realizado pela força F deverá aparecer na carga sob alguma forma de energia, devido ao trabalho realizado pela força R. A carga deverá aumentar sua energia potencial (algo sendo levantado, por exemplo) ou aumentar sua energia cinética ou se deformar, ou se aquecer etc. ou 'mistura disso tudo'.No caso mais simples, no qual o trabalho mecânico transcorre sob o concurso de força constante efetuando deslocamento em sua própria direção e sentido, tal trabalho é calculado, como sabemos, por:
Trabalho = (intensidade da força) x (extensão do deslocamento)
Nas máquinas simples ideais, onde todos os trabalhos ocorrem sem o concurso de forças dissipativas (não há os atritos indesejáveis) o trabalho da força resistente deve ser igual ao trabalho da força motriz. Isso é conseqüência imediata do princípio da conservação da energia. Escrevemos:
r = m ==> máquinas ideais
Se indicarmos por dR e dF os deslocamentos dos pontos de aplicação da força resistente e da força motriz, respectivamente, nas condições acima teremos:
r = m ou R. dR = F. dF <== máquinas ideais
Como a VM = R/F, decorre da expressão acima que também VM = dF/dR , ou seja, a vantagem mecânica pode ser expressa em termos de deslocamentos; razão entre os deslocamentos efetivados pelas forças motriz e força resistente.

Ainda sobre o trabalho nas máquinas vale ressaltar:
(a) Nenhuma máquina pode multiplicar trabalho ou energia. A 'lei áurea' da Mecânica nos informa que nenhuma máquina pode realizar trabalho maior do que aquele recebido.
(b) A 'economia' em intensidade na força motriz (ou aplicada, ou potente) implica em 'acréscimo' no seu deslocamento: o que se ganha em força perde-se em distância. Uma máquina simples com VM = 2, tem capacidade de multiplicar a força aplicada por 2 porém, para tanto, o deslocamento dessa força será duas vezes maior que aquele da força transmitida (ou resistente, ou resistência).
(c) É comum denominarmos como "trabalho da máquina" aquele trabalho realizado pela força que ela transmite. É bom lembrar, entretanto, que: trabalho é conceito associado a uma força e não a uma máquina.(d) Não existe máquina ideal, ou seja, aquela cujo trabalho das forças dissipativas é nulo. Para as máquinas reais o trabalho passivo (trabalho das forças dissipativas) deve ser incorporado como parcela do trabalho resistente; a outra parcela será o trabalho útil. Para tais máquinas tem-se, portanto:
motor = resistente = passivo + útil
Nessas condições, define-se como rendimento da máquina à razão entre o trabalho útil e o trabalho motor:
= útil / motor
Como na realidade útil < motor o rendimento sempre será uma fração da unidade. Para aumentar o rendimento das máquinas é necessário diminuir os atritos, o que se consegue por meio de lubrificantes, rolamentos de esferas de aço etc.
Máquinas Simples( Alavancas)
AlavancasSão simples peças rígidas, tais como, barras, hastes, travessões (retos ou curvos), capazes de girar ao redor de um ponto ou eixo, denominado fulcro ou ponto de apoio. Tesouras, hastes de guarda-chuva, alicates, balanças, articulações das 'velhas' máquinas de escrever, remos, gangorras e tantos outros dispositivos funcionam baseados no princípio das alavancas.Em uma das extremidades da alavanca o operador aplica seu esforço (F) e ela transfere para a outra extremidade (ou região) uma força (R) para a 'carga' aí colocada.
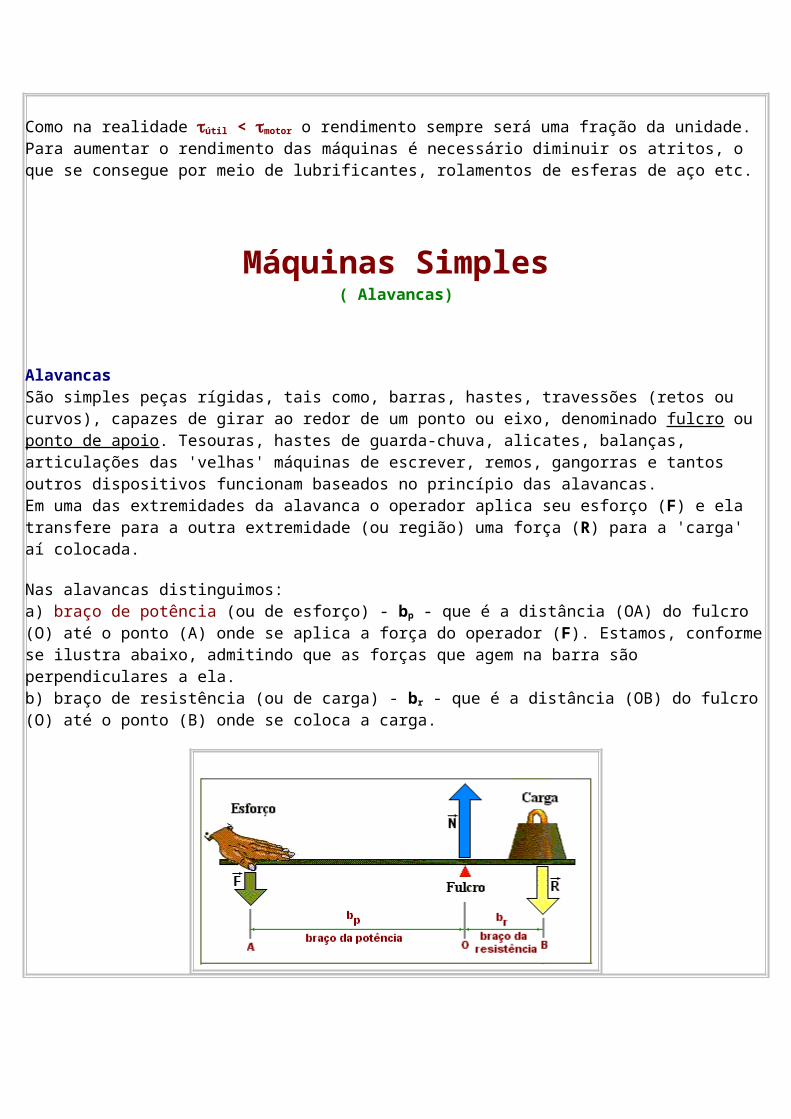
Nas alavancas distinguimos:a) braço de potência (ou de esforço) - bp - que é a distância (OA) do fulcro (O) até o ponto

(A) onde se aplica a força do operador (F). Estamos, conforme se ilustra abaixo, admitindo que as forças que agem na barra são perpendiculares a ela.b) braço de resistência (ou de carga) - br - que é a distância (OB) do fulcro (O) até o ponto (B) onde se coloca a carga.
Se, na situação ilustrada a alavanca estiver em equilíbrio, deveremos ter:
Equilíbrio das forças: N = F + REquilíbrio dos momentos: MF,O = MR,O ou F.bp = R.br
Em operação os pontos A e B irão se movimentar sobre arcos de circunferências de centro O e de extensões dp e dr. Não podemos conceitualmente confundir tais deslocamentos com os correspondentes braços de potência bp e de resistência br, mas, valerá a relação: dp / dr = bp / br .
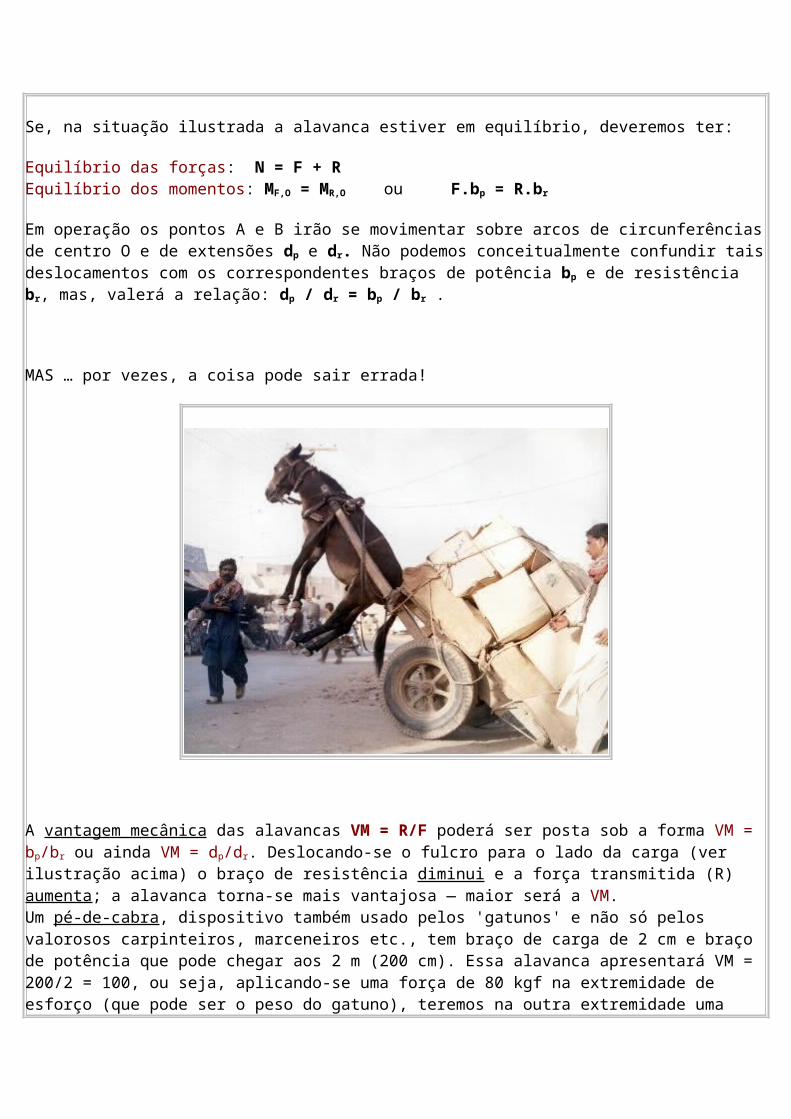
MAS … por vezes, a coisa pode sair errada!

A vantagem mecânica das alavancas VM = R/F poderá ser posta sob a forma VM = bp/br ou ainda VM = dp/dr. Deslocando-se o fulcro para o lado da carga (ver ilustração acima) o braço de resistência diminui e a força transmitida (R) aumenta; a alavanca torna-se mais vantajosa — maior será a VM.Um pé-de-cabra, dispositivo também usado pelos 'gatunos' e não só pelos valorosos carpinteiros, marceneiros etc., tem braço de carga de 2 cm e braço de potência que pode chegar aos 2 m (200 cm). Essa alavanca apresentará VM = 200/2 = 100, ou seja, aplicando-se uma força de 80 kgf na extremidade de esforço (que pode ser o peso do gatuno), teremos na outra extremidade uma força transmitida de intensidade 8 000 kgf, suficiente até para arrancar os batentes de uma porta!
Classificação das alavancasDependendo das posições relativas das posições ocupadas pela potência (F), fulcro (O) e resistência (R), as alavancas classificam-se em:
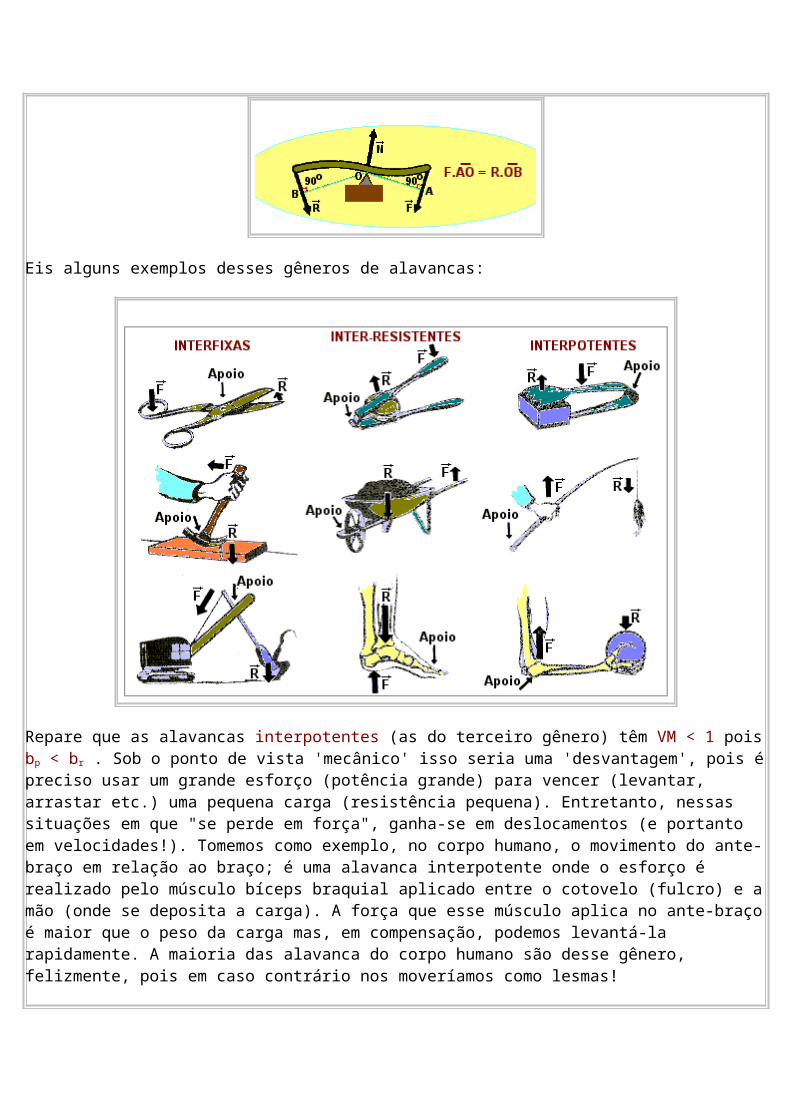
Alavancas do primeiro gênero ou interfixas - onde o fulcro localiza-se entre a força aplicada (potência) e a força transmitida (resistência). Ordem: ROPAlavancas do segundo gênero ou inter-resistentes - onde a força transmitida (resistência) localiza-se entre o fulcro e a força aplicada (potência). Ordem: ORPAlavancas do terceiro gênero ou interpotentes - onde a força aplicada (potência) localiza-se entre o fulcro e a força transmitida (resistência). Ordem: OPR
Para todos os gêneros teremos sempre: OA = bp e OB = br , de modo que a 'equação de equilíbrio', comum para todas, será: F.bp = R.br . A VM para todas elas será: VM = bp/br .Alavancas nem sempre são 'barras retas', não importa, as equações continuam válidas se tomarmos os devidos cuidados nas medidas de distâncias. Eis um caso:
Eis alguns exemplos desses gêneros de alavancas:
Repare que as alavancas interpotentes (as do terceiro gênero) têm VM < 1 pois bp < br . Sob o ponto de vista 'mecânico' isso seria uma 'desvantagem', pois é preciso usar um grande esforço (potência grande) para vencer (levantar, arrastar etc.) uma pequena carga (resistência pequena). Entretanto, nessas situações em que "se perde em força", ganha-se em deslocamentos (e portanto em velocidades!). Tomemos como exemplo, no corpo humano, o movimento do ante-braço em relação ao braço; é uma alavanca interpotente onde o esforço é realizado pelo músculo bíceps braquial aplicado entre o cotovelo (fulcro) e a mão (onde se deposita a carga). A força que esse músculo aplica no ante-braço é maior que o peso da carga mas, em compensação, podemos levantá-la rapidamente. A maioria das alavanca do corpo humano são desse gênero, felizmente, pois em caso contrário nos moveríamos como lesmas!
Na parte 4 desse Resumo de Máquinas Simples abordaremos algumas associações de alavancas e algo sobre balanças.
Parte ExperimentalPara a parte experimental sobre as alavancas, um projeto indispensável no currículo, recomenda-se o uso do seguinte material:
1 suporte comum de laboratório, com haste de 50 cm;1 presilha dotada de ponta cilíndrica (diâmetro 3 mm);1 'metro de balcão';1 m de fio de cobre #16, sem capa plástica;15 'chumbadas' de pesca iguais (50g, por exemplo);
O metro de balcão deve ser furado ao longo de suas divisões, de 5 em 5 cm, com broca de 4 mm. O fio de cobre 16 deve ser cortado em pedaços de 5cm para serem usados como ganchos para as chumbadas (basta passar o pedaço de fio pelo orifício da chumbada e
dobrar as extremidades com alicate de bico redondo). Eis um visual dessa montagem:
Para aqueles que já têm em seus laboratórios os equipamentos tradicionais (suporte, haste metálica perfurada, porta-pesos, massores, dinamômetros etc.) eis os visuais desses experimentos:
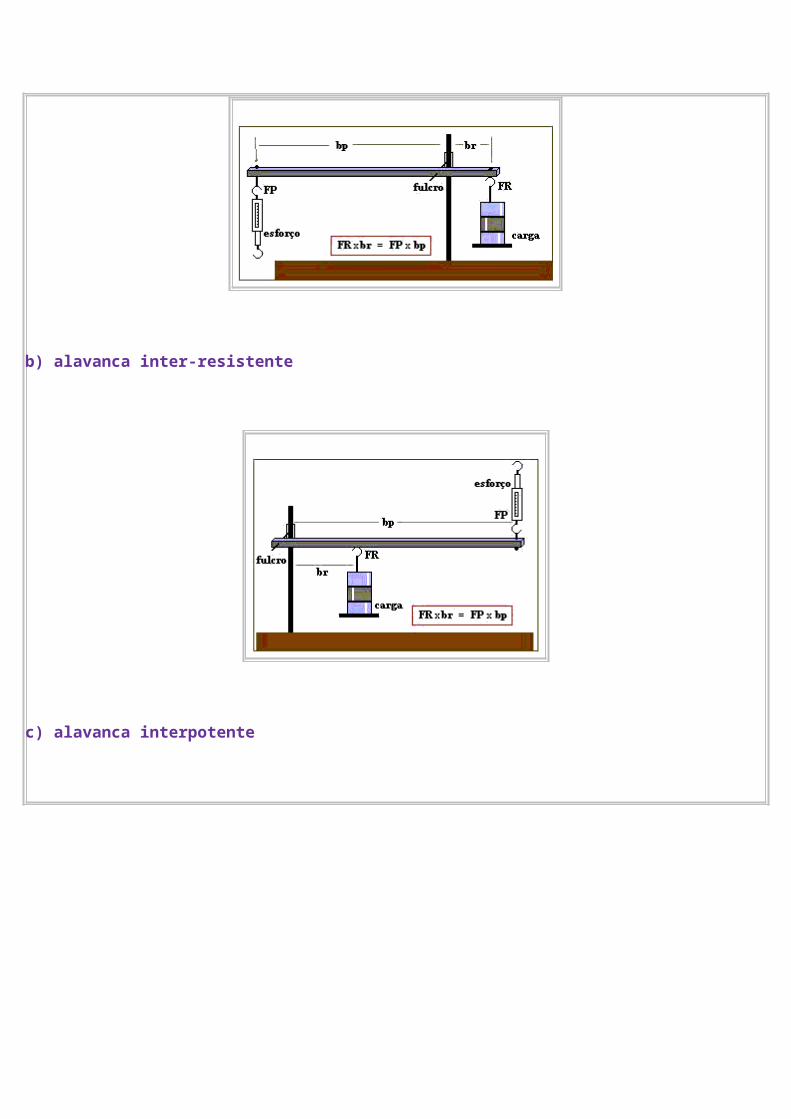
a) alavanca interfixa
b) alavanca inter-resistente

c) alavanca interpotente
Máquinas Simples( Polias ou roldanas)
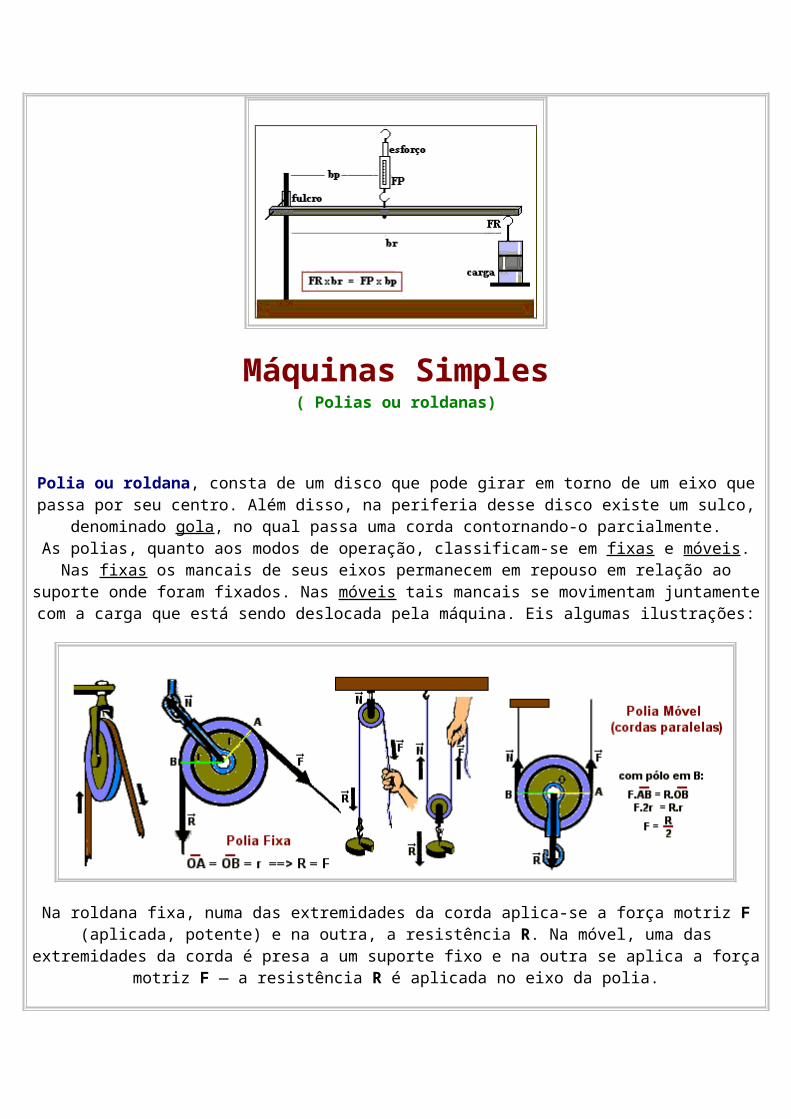
Polia ou roldana, consta de um disco que pode girar em torno de um eixo que passa por seu centro. Além disso, na periferia desse disco existe um sulco, denominado gola, no qual passa uma corda
contornando-o parcialmente.As polias, quanto aos modos de operação, classificam-se em fixas e móveis. Nas fixas os mancais de
seus eixos permanecem em repouso em relação ao suporte onde foram fixados. Nas móveis tais mancais se movimentam juntamente com a carga que está sendo deslocada pela máquina. Eis algumas ilustrações:
Na roldana fixa, numa das extremidades da corda aplica-se a força motriz F (aplicada, potente) e na outra, a resistência R. Na móvel, uma das extremidades da corda é presa a um suporte fixo e na outra
se aplica a força motriz F — a resistência R é aplicada no eixo da polia.
Na polia fixa a vantagem mecânica vale 1, sua função como máquina simples e apenas a de inverter o sentido da força aplicada, isto é, aplicamos uma força de cima para baixo numa das extremidades da
corda e a polia transmite á carga, para levantá-la, uma força de baixo para cima. Isso é vantajoso, porque podemos aproveitar o nosso próprio peso (ou um contrapeso) para cumprir a tarefa de levantar
um corpo.
Equilíbrio das polias
I) Para qualquer efeito de cálculo a polia fixa comporta-se como alavanca interfixa de braços iguais (VM = 1) e a polia móvel comporta-se como alavanca inter-resistente cujo braço da potência é o dobro do braço da resistência (VM = 2*). É por isso que muitos autores não incluem as polias como máquina
simples fundamental e sim como simples aplicações das alavancas.
II) Como na polia fixa tem-se VM = 1, disso decorre F = R e dp = dr.
III) Na polia móvel com corda de ramos paralelos tem-se VM = 2, disso decorre F = R/2 e dp = 2.dr.
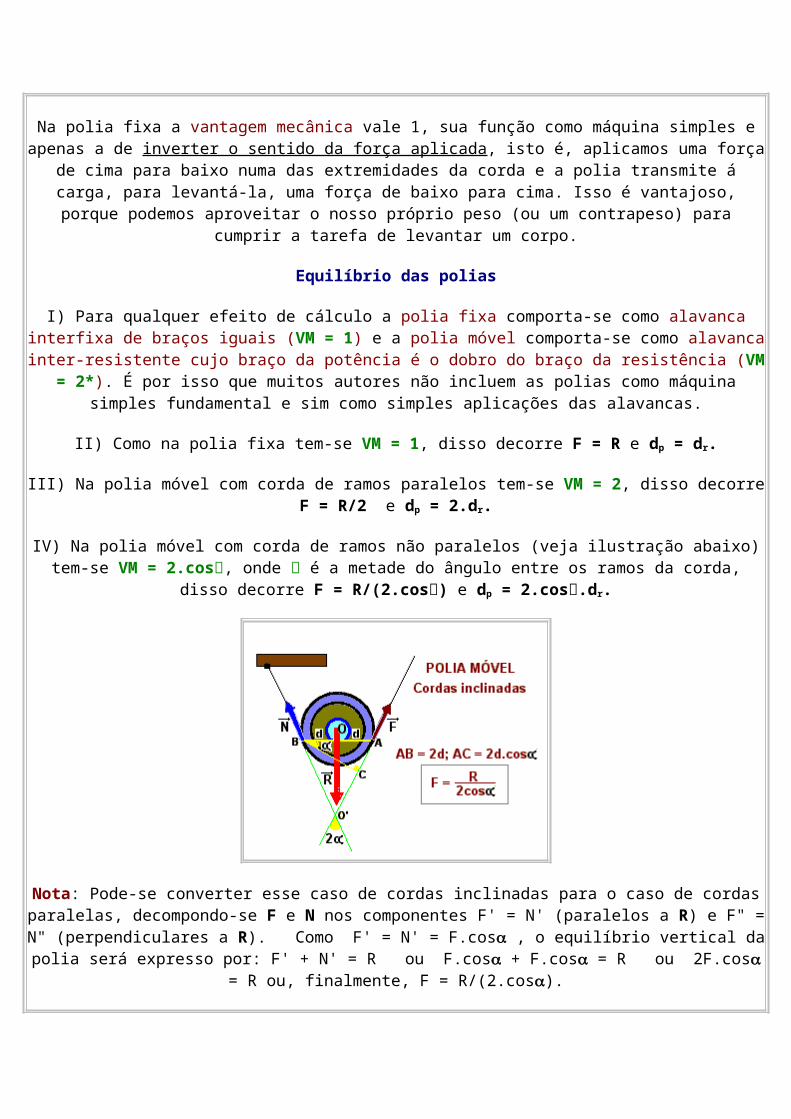
IV) Na polia móvel com corda de ramos não paralelos (veja ilustração abaixo) tem-se VM = 2.cos, onde é a metade do ângulo entre os ramos da corda, disso decorre F = R/(2.cos) e dp = 2.cos.dr.

Nota: Pode-se converter esse caso de cordas inclinadas para o caso de cordas paralelas, decompondo-se F e N nos componentes F' = N' (paralelos a R) e F" = N" (perpendiculares a R). Como F' = N' = F.cos , o equilíbrio vertical da polia será expresso por: F' + N' = R ou F.cos + F.cos = R ou
2F.cos = R ou, finalmente, F = R/(2.cos).
Associações de polias
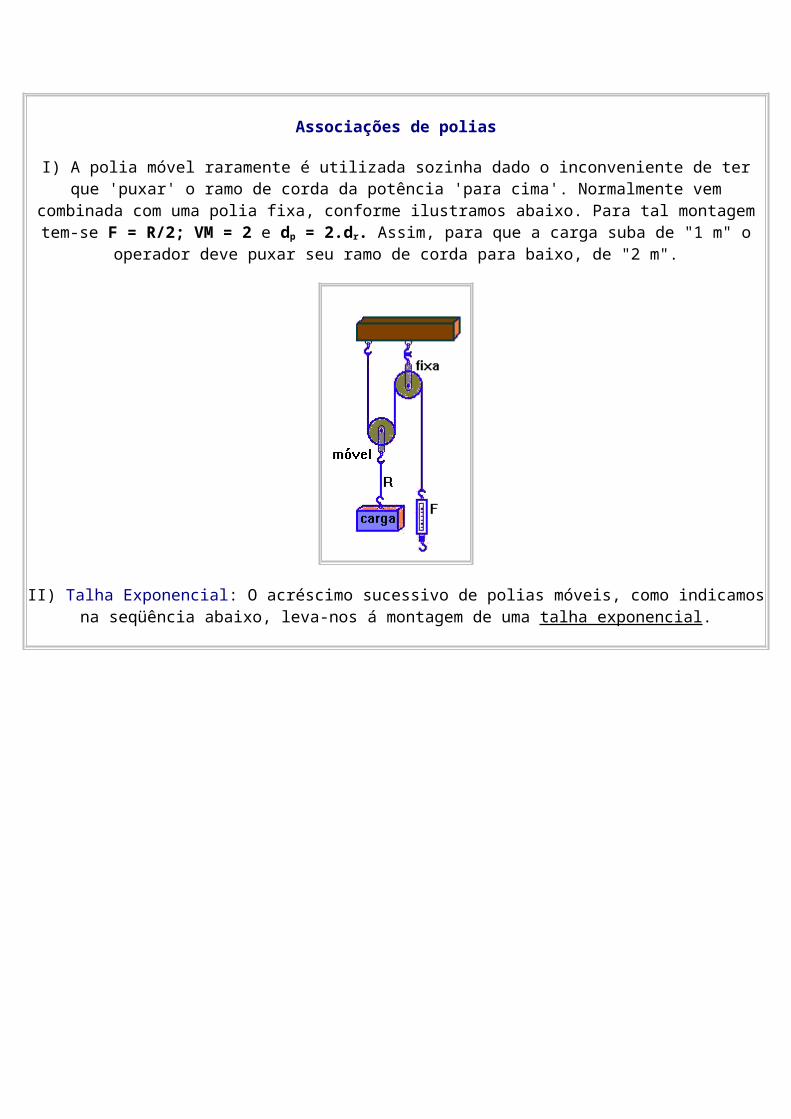
I) A polia móvel raramente é utilizada sozinha dado o inconveniente de ter que 'puxar' o ramo de corda da potência 'para cima'. Normalmente vem combinada com uma polia fixa, conforme ilustramos abaixo.
Para tal montagem tem-se F = R/2; VM = 2 e dp = 2.dr. Assim, para que a carga suba de "1 m" o operador deve puxar seu ramo de corda para baixo, de "2 m".
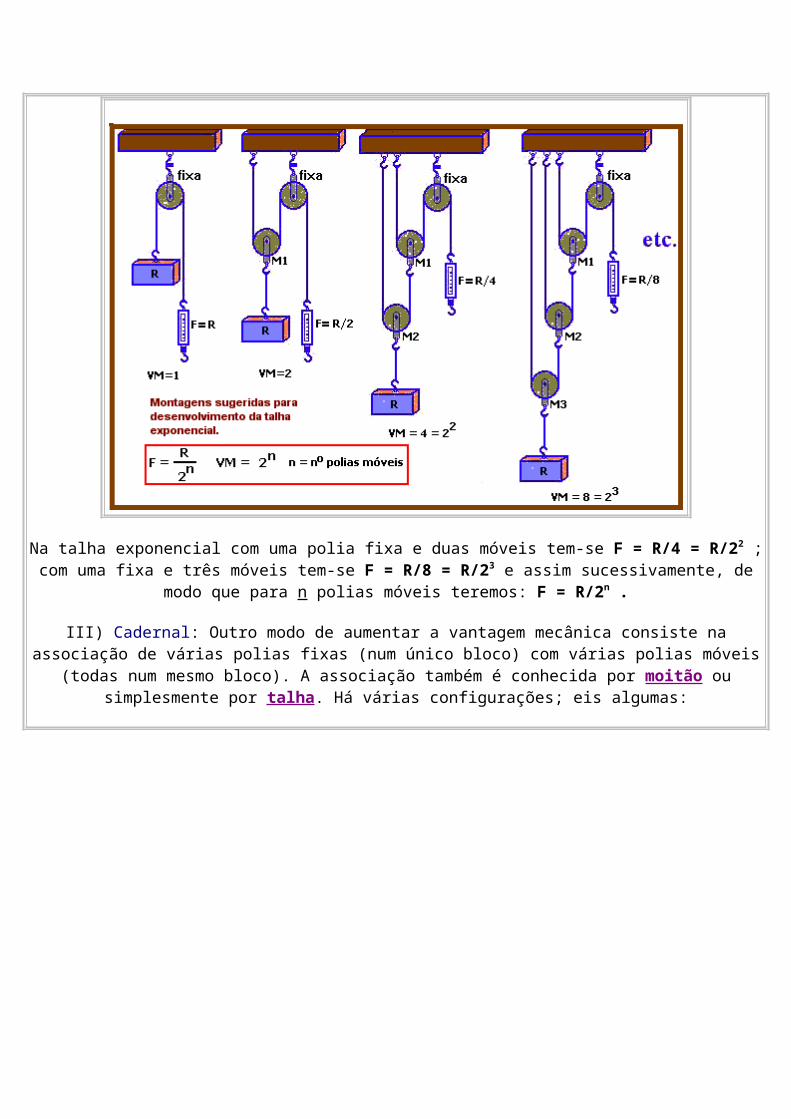
II) Talha Exponencial: O acréscimo sucessivo de polias móveis, como indicamos na seqüência abaixo, leva-nos á montagem de uma talha exponencial.
Na talha exponencial com uma polia fixa e duas móveis tem-se F = R/4 = R/22 ; com uma fixa e três móveis tem-se F = R/8 = R/23 e assim sucessivamente, de modo que para n polias móveis teremos: F =
R/2n .
III) Cadernal: Outro modo de aumentar a vantagem mecânica consiste na associação de várias polias fixas (num único bloco) com várias polias móveis (todas num mesmo bloco). A associação também é
conhecida por moitão ou simplesmente por talha. Há várias configurações; eis algumas:
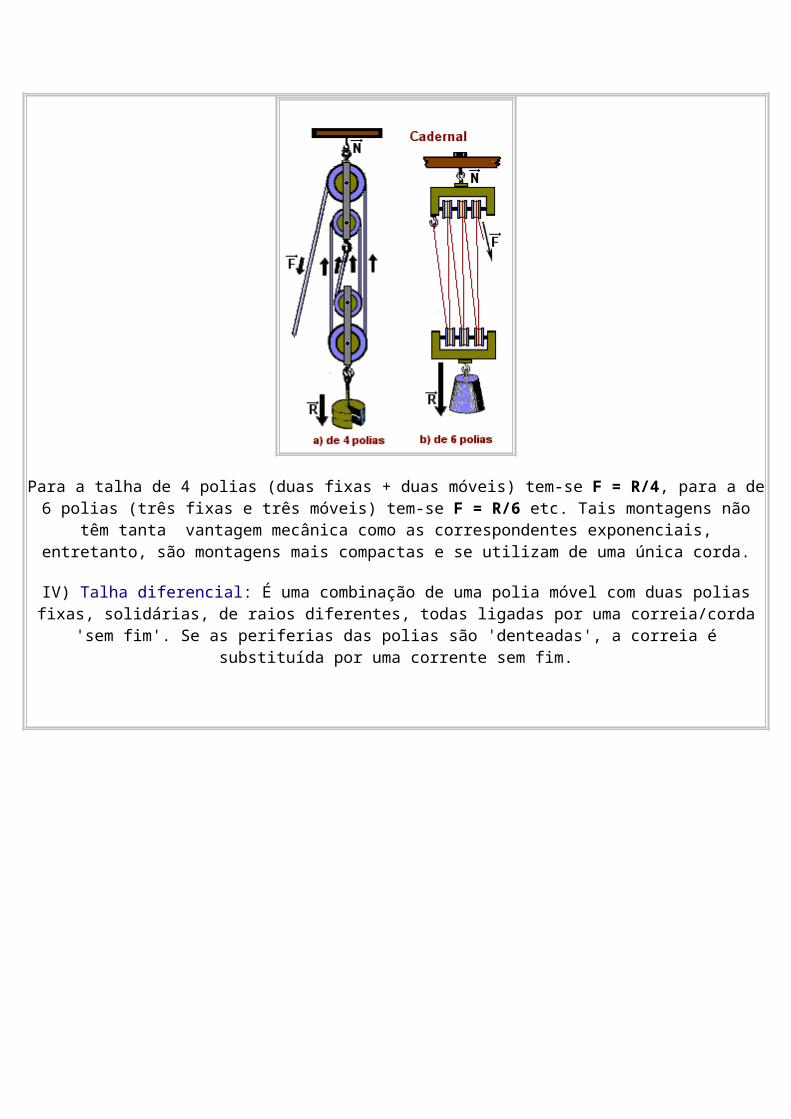
Para a talha de 4 polias (duas fixas + duas móveis) tem-se F = R/4, para a de 6 polias (três fixas e três móveis) tem-se F = R/6 etc. Tais montagens não têm tanta vantagem mecânica como as
correspondentes exponenciais, entretanto, são montagens mais compactas e se utilizam de uma única corda.
IV) Talha diferencial: É uma combinação de uma polia móvel com duas polias fixas, solidárias, de raios diferentes, todas ligadas por uma correia/corda 'sem fim'. Se as periferias das polias são 'denteadas', a
correia é substituída por uma corrente sem fim.
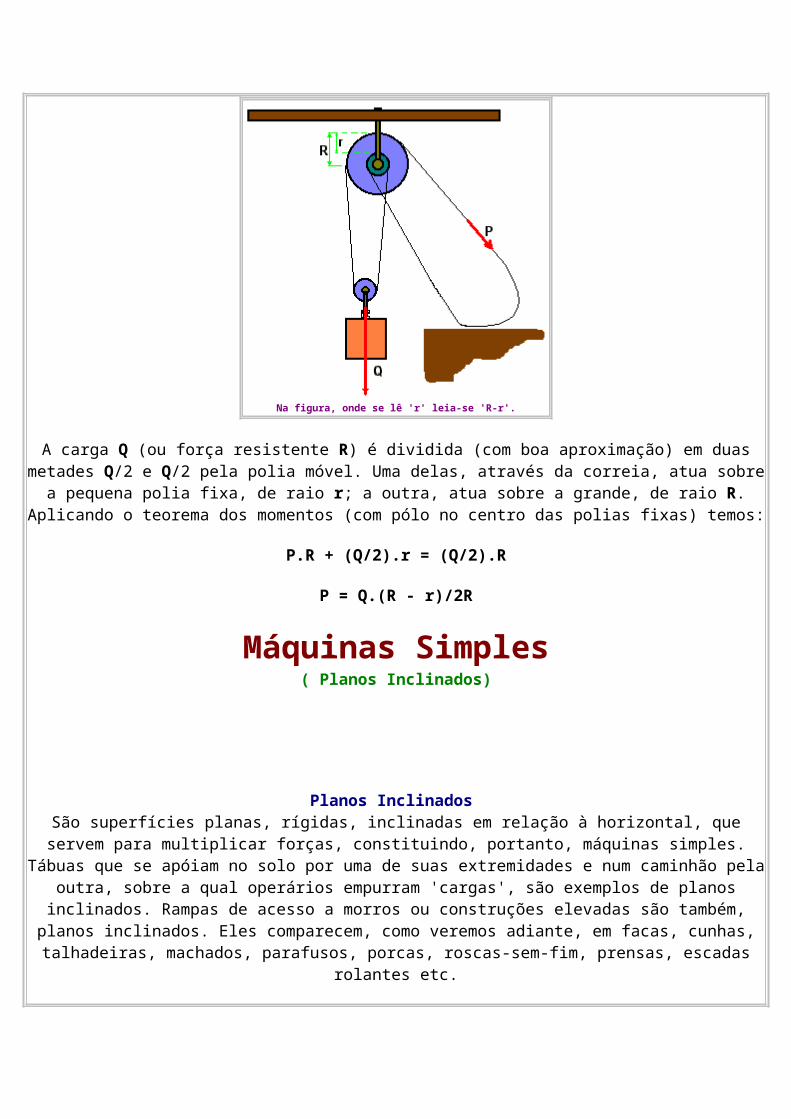
Na figura, onde se lê 'r' leia-se 'R-r'.
A carga Q (ou força resistente R) é dividida (com boa aproximação) em duas metades Q/2 e Q/2 pela polia móvel. Uma delas, através da correia, atua sobre a pequena polia fixa, de raio r; a outra, atua
sobre a grande, de raio R. Aplicando o teorema dos momentos (com pólo no centro das polias fixas) temos:
P.R + (Q/2).r = (Q/2).R
P = Q.(R - r)/2R
Máquinas Simples( Planos Inclinados)
Planos Inclinados São superfícies planas, rígidas, inclinadas em relação à horizontal, que servem para multiplicar forças,
constituindo, portanto, máquinas simples.Tábuas que se apóiam no solo por uma de suas extremidades e num caminhão pela outra, sobre a qual
operários empurram 'cargas', são exemplos de planos inclinados. Rampas de acesso a morros ou construções elevadas são também, planos inclinados. Eles comparecem, como veremos adiante, em facas, cunhas, talhadeiras, machados, parafusos, porcas, roscas-sem-fim, prensas, escadas rolantes
etc.
Conservação do trabalhoConsideremos o plano inclinado abaixo, que forma ângulo com o plano horizontal.
O operador deve aplicar sobre a carga (Q = resistência) uma força de intensidade Fa = P (potência) paralela à inclinação do plano, de modo a transporta-la do plano horizontal inferior ao plano horizontal
superior, isto é, elevar a carga de uma altura H.Sendo Q o peso da carga, para eleva-la diretamente, na vertical e, lentamente, o operador deveria
aplicar uma força vertical de intensidade igual a Q, ou seja, deveríamos ter P (potência) = Q (resistência) para uma elevação vertical direta no deslocamento H. Se, contudo, a carga for empurrada ao longo do plano inclinado de , a intensidade da força a ser aplicada (P), paralela ao plano inclinado,
será menor do que Q.Isto significa que, para cumprir a mesma tarefa de levantar lentamente uma carga a uma altura H, o
plano inclinado permite uma 'economia de força' (P < Q), o que acarreta, entretanto, um 'acréscimo de distância' (L > H). A 'velha' lei áurea da mecânica: ganha-se em força, mas perde-se em distância.
Lembrando que, desprezando-se as forças dissipativas, em toda máquina simples há conservação de trabalho (em regime operacional — no caso, 'carga' subindo o plano inclinado em movimento uniforme),
podemos escrever:
P.L = Q.H ou P = Q.(H/L)
Observe que P.L é o trabalho da força aplicada pelo operador e Q.H é o trabalho necessário para elevar, lentamente, uma carga de peso Q a uma altura H.
Por outro lado, observe, na figura, que H/L é justamente o sen, de modo que podemos por: P = Q.sen , que é a 'equação do plano inclinado'.
Vantagem mecânicaA vantagem mecânica (VM) de uma máquina simples traduz a 'economia' de força proporcionada pela
máquina, isto é, o número pela qual a força aplicada pelo operador está sendo multiplicada.Sendo P a intensidade da força aplicada pelo operador e Q o peso da carga a ser levantada, temos:
VM = Q/P (definição)
Da conservação do trabalho P.L = Q.H tem-se: Q/P = L/H, donde:
VM = Q/P = L/H = 1/sen
Observe que quanto menor for a inclinação (), menor será sen e maior será a vantagem mecânica.
Experiência 1 Equilíbrio no plano inclinado, com 'potência' paralela ao plano:
Na ausência de atrito, no corpo sobre o plano inclinado agem três forças: seu peso Q, a reação (normal) de apoio por parte do plano (N) e a força potente (P). A carga vertical Q pode ser decomposta em N'
(perpendicular ao plano inclinado) e P' (paralela ao plano inclinado). Em função de Q e tais componentes valem: P' = Q.sen e N' = Q.cos.
No equilíbrio devemos ter:
N = N' e P = P' ou N = Q.cos e P = Q.sen
Experiência 2 Equilíbrio no plano inclinado, com 'potência' horizontal:
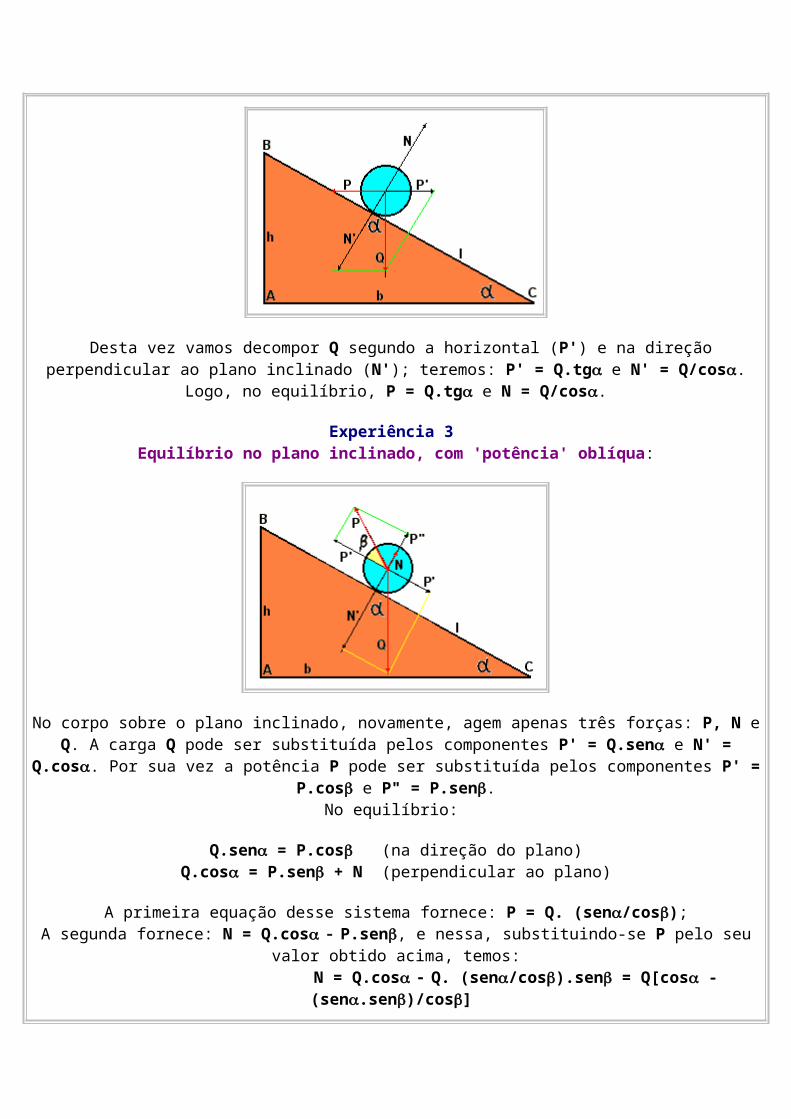
Desta vez vamos decompor Q segundo a horizontal (P') e na direção perpendicular ao plano inclinado (N'); teremos: P' = Q.tg e N' = Q/cos. Logo, no equilíbrio, P = Q.tg e N = Q/cos.
Experiência 3 Equilíbrio no plano inclinado, com 'potência' oblíqua:
No corpo sobre o plano inclinado, novamente, agem apenas três forças: P, N e Q. A carga Q pode ser substituída pelos componentes P' = Q.sen e N' = Q.cos. Por sua vez a potência P pode ser
substituída pelos componentes P' = P.cos e P" = P.sen.No equilíbrio:
Q.sen = P.cos (na direção do plano)Q.cos = P.sen + N (perpendicular ao plano)
A primeira equação desse sistema fornece: P = Q. (sen/cos);A segunda fornece: N = Q.cos P.sen, e nessa, substituindo-se P pelo seu valor obtido acima,
temos: N = Q.cos Q. (sen/cos).sen = Q[cos - (sen.sen)/cos]
N = Q.cos( + )/cos.
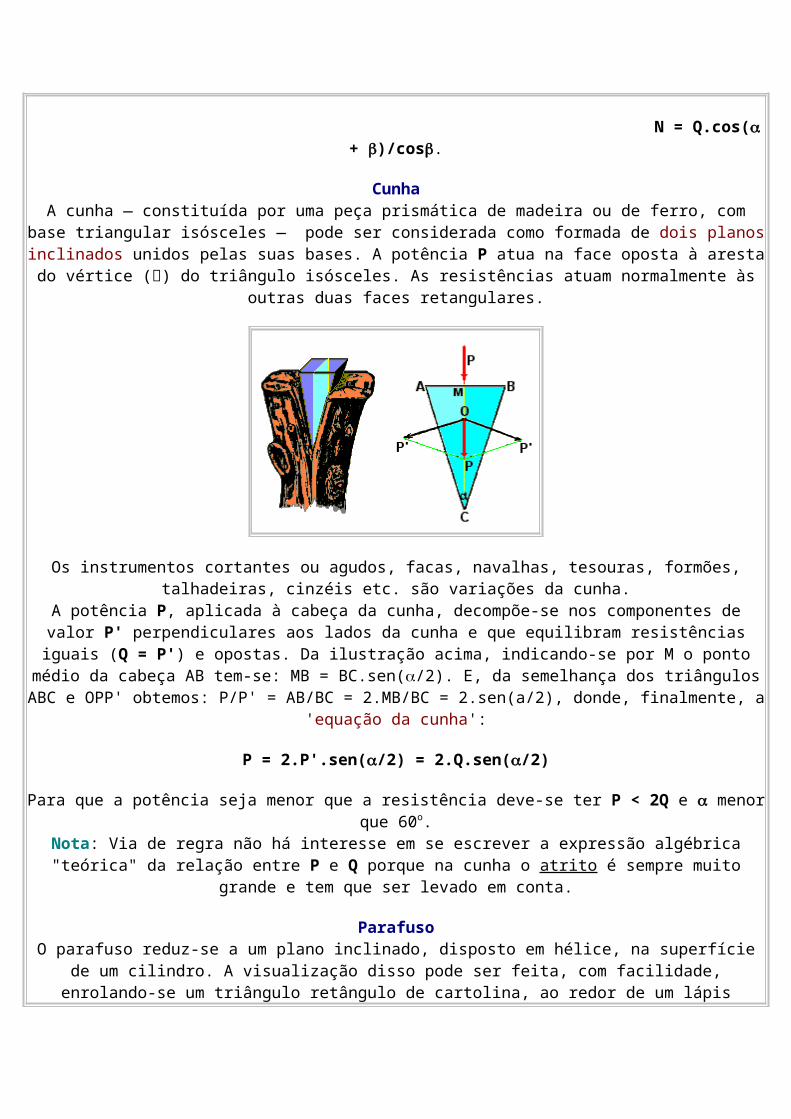
CunhaA cunha — constituída por uma peça prismática de madeira ou de ferro, com base
triangular isósceles — pode ser considerada como formada de dois planos inclinados unidos pelas suas bases. A potência P atua na face oposta à aresta do vértice () do
triângulo isósceles. As resistências atuam normalmente às outras duas faces retangulares.
Os instrumentos cortantes ou agudos, facas, navalhas, tesouras, formões, talhadeiras, cinzéis etc. são variações da cunha.
A potência P, aplicada à cabeça da cunha, decompõe-se nos componentes de valor P' perpendiculares aos lados da cunha e que equilibram resistências iguais (Q = P') e opostas. Da ilustração acima,
indicando-se por M o ponto médio da cabeça AB tem-se: MB = BC.sen(/2). E, da semelhança dos triângulos ABC e OPP' obtemos: P/P' = AB/BC = 2.MB/BC = 2.sen(a/2), donde, finalmente, a 'equação
da cunha':
P = 2.P'.sen(/2) = 2.Q.sen(/2)
Para que a potência seja menor que a resistência deve-se ter P < 2Q e menor que 60o.Nota: Via de regra não há interesse em se escrever a expressão algébrica "teórica" da relação entre P e
Q porque na cunha o atrito é sempre muito grande e tem que ser levado em conta.
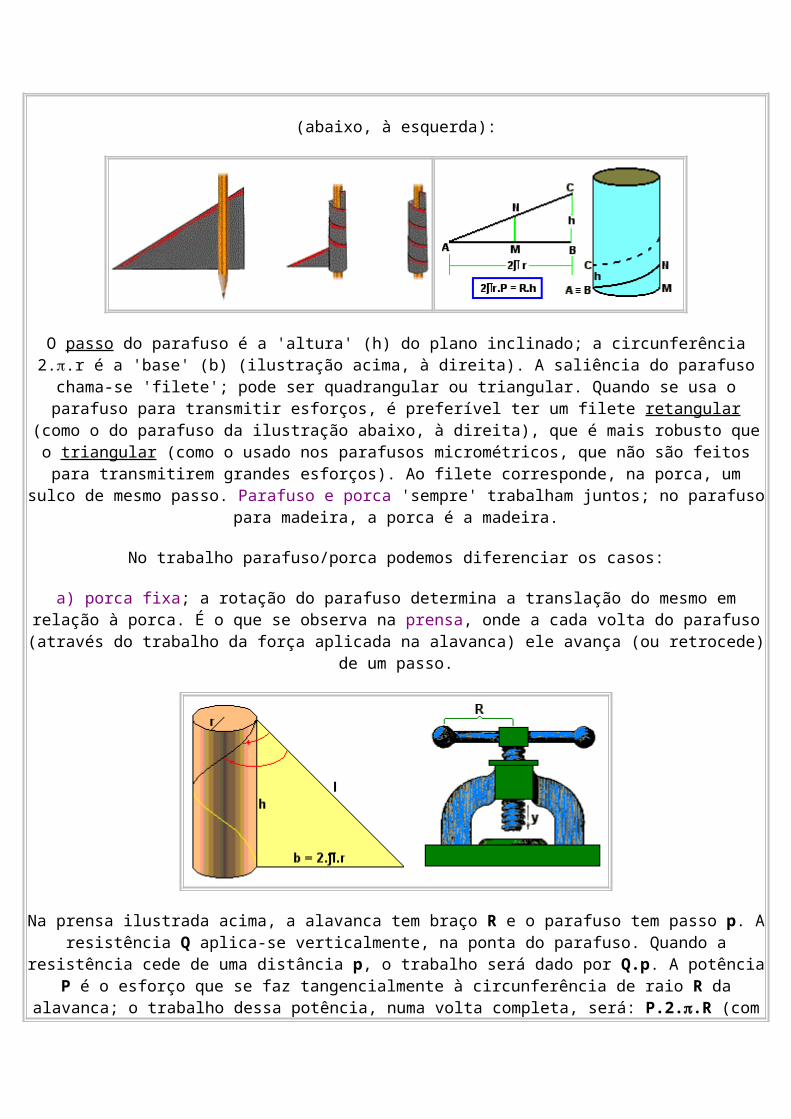
ParafusoO parafuso reduz-se a um plano inclinado, disposto em hélice, na superfície de um cilindro. A visualização disso pode ser feita, com facilidade, enrolando-se um triângulo retângulo de
cartolina, ao redor de um lápis (abaixo, à esquerda):
O passo do parafuso é a 'altura' (h) do plano inclinado; a circunferência 2..r é a 'base' (b) (ilustração
acima, à direita). A saliência do parafuso chama-se 'filete'; pode ser quadrangular ou triangular. Quando se usa o parafuso para transmitir esforços, é preferível ter um filete retangular (como o do parafuso da
ilustração abaixo, à direita), que é mais robusto que o triangular (como o usado nos parafusos micrométricos, que não são feitos para transmitirem grandes esforços). Ao filete corresponde, na porca,
um sulco de mesmo passo. Parafuso e porca 'sempre' trabalham juntos; no parafuso para madeira, a porca é a madeira.
No trabalho parafuso/porca podemos diferenciar os casos:
a) porca fixa; a rotação do parafuso determina a translação do mesmo em relação à porca. É o que se observa na prensa, onde a cada volta do parafuso (através do trabalho da força
aplicada na alavanca) ele avança (ou retrocede) de um passo.
Na prensa ilustrada acima, a alavanca tem braço R e o parafuso tem passo p. A resistência Q aplica-se verticalmente, na ponta do parafuso. Quando a resistência cede de uma distância p, o trabalho será
dado por Q.p. A potência P é o esforço que se faz tangencialmente à circunferência de raio R da alavanca; o trabalho dessa potência, numa volta completa, será: P.2..R (com essa volta completa o
parafuso desloca-se de p).
Tem-se, pois: P.2..R = Q.p ou P = Q.p/(2R).
Cada prensa apresenta sua característica (n) que é: (2R)/p = n , de modo que, a 'equação da prensa' é:
P = Q/n
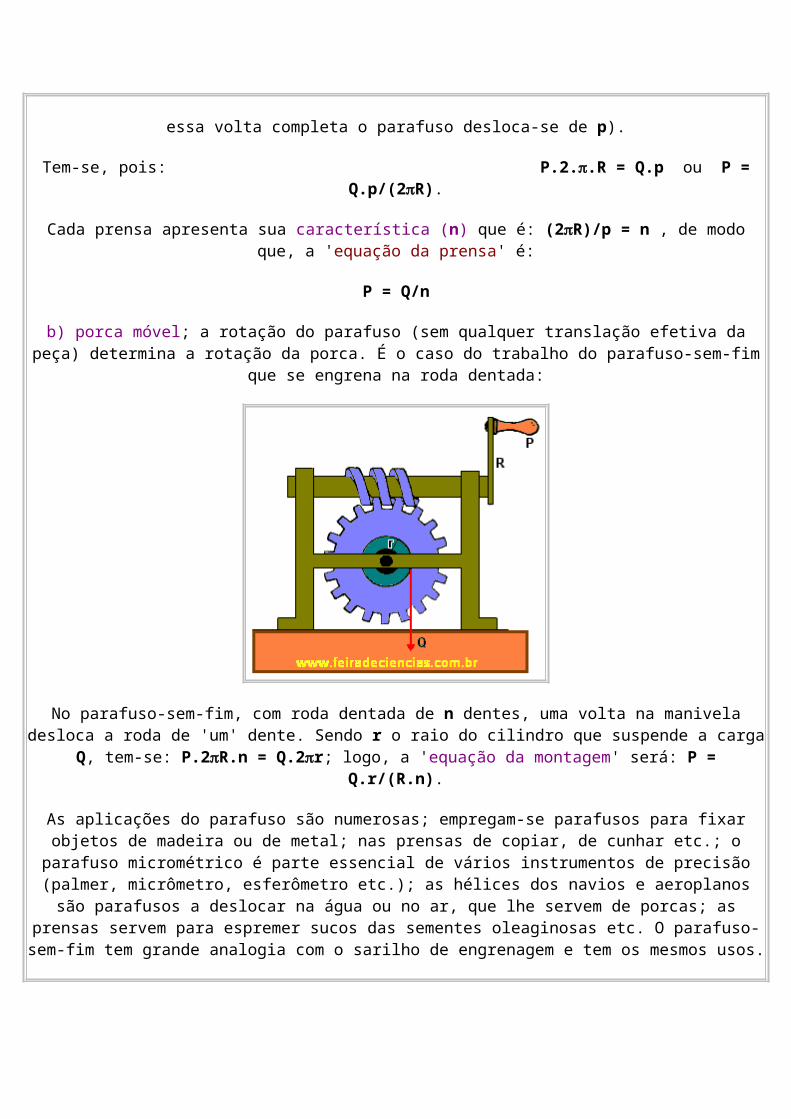
b) porca móvel; a rotação do parafuso (sem qualquer translação efetiva da peça) determina a rotação da porca. É o caso do trabalho do parafuso-sem-fim que se engrena na roda
dentada:

No parafuso-sem-fim, com roda dentada de n dentes, uma volta na manivela desloca a roda de 'um' dente. Sendo r o raio do cilindro que suspende a carga Q, tem-se: P.2R.n = Q.2r; logo, a 'equação da
montagem' será: P = Q.r/(R.n).
As aplicações do parafuso são numerosas; empregam-se parafusos para fixar objetos de madeira ou de metal; nas prensas de copiar, de cunhar etc.; o parafuso micrométrico é parte essencial de vários
instrumentos de precisão (palmer, micrômetro, esferômetro etc.); as hélices dos navios e aeroplanos são parafusos a deslocar na água ou no ar, que lhe servem de porcas; as prensas servem para
espremer sucos das sementes oleaginosas etc. O parafuso-sem-fim tem grande analogia com o sarilho de engrenagem e tem os mesmos usos.
Máquinas Simples(Rodas e Eixos)
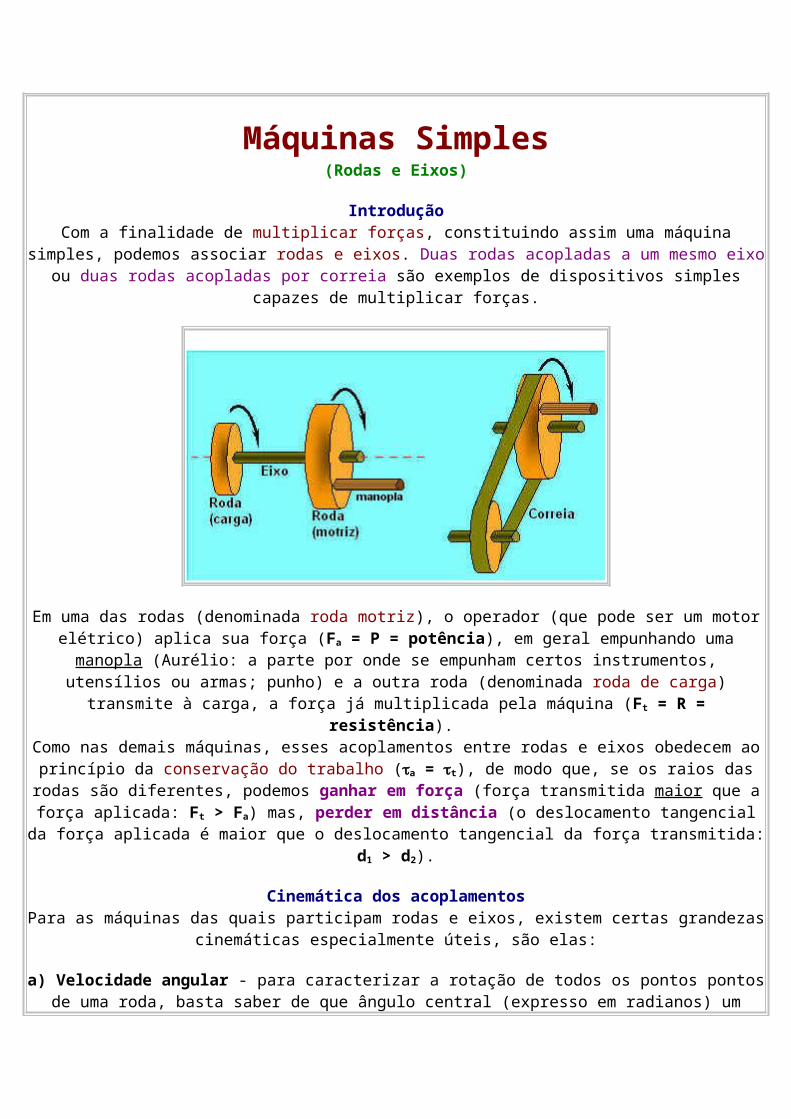
IntroduçãoCom a finalidade de multiplicar forças, constituindo assim uma máquina simples, podemos associar rodas e eixos. Duas rodas acopladas a um mesmo eixo ou duas rodas acopladas
por correia são exemplos de dispositivos simples capazes de multiplicar forças.

Em uma das rodas (denominada roda motriz), o operador (que pode ser um motor elétrico) aplica sua força (Fa = P = potência), em geral empunhando uma manopla (Aurélio: a parte por onde se empunham certos instrumentos, utensílios ou armas; punho) e a outra roda (denominada roda de carga) transmite à
carga, a força já multiplicada pela máquina (Ft = R = resistência). Como nas demais máquinas, esses acoplamentos entre rodas e eixos obedecem ao princípio da
conservação do trabalho (a = t), de modo que, se os raios das rodas são diferentes, podemos ganhar em força (força transmitida maior que a força aplicada: Ft > Fa) mas, perder em distância (o
deslocamento tangencial da força aplicada é maior que o deslocamento tangencial da força transmitida: d1 > d2).
Cinemática dos acoplamentosPara as máquinas das quais participam rodas e eixos, existem certas grandezas cinemáticas
especialmente úteis, são elas:
a) Velocidade angular - para caracterizar a rotação de todos os pontos pontos de uma roda, basta saber de que ângulo central (expresso em radianos) um ponto qualquer da roda gira num determinado
intervalo de tempo.A velocidade angular () é expressa por:
= (deslocamento angular)/(intervalo de tempo) = /t … (rad/s)
Nota 1: Rodas acopladas a um mesmo eixo têm mesma velocidade angular, mesmo período e mesma freqüência (ilustração abaixo, esquerda):
1 = 2 <==> V1/r1 = V2/r2 <==> V1/V2 = r1/r2
Nota 2: Para rodas acopladas por correia, as velocidades lineares dos pontos das rodas, em contato com a correia, têm o mesmo valor; as velocidades angulares são inversamente proporcionais aos
respectivos raios (ilustração acima, direita):
V = V1 = V2 <==> 1r1 = 2r2 <==> 1/2 = r2/r1
b) Período - Se a velocidade angular for constante, cada ponto da roda descreverá um movimento circular e uniforme. Neste caso, definimos o período (T) como sendo o intervalo de tempo necessário
para que qualquer ponto da roda descreva uma volta completa.
c) Freqüência - Ainda no caso de velocidade angular constante, denomina-se freqüência (f) ao número de voltas completas efetuadas pelo ponto da roda, na unidade de tempo.
A freqüência vem expressa por:
f = (No de voltas)/(intervalo de tempo unitário) = N/t
Para t = T (período), teremos N = 1 e, portanto: f = 1/T.No Sistema Internacional de Unidades, T mede-se em segundos (s), f em hertz (Hz). Na técnica usam-
se, também, como unidade de freqüência o rpm (rotações por minuto). Vale: 1 Hz = 60 rpm.
d) Velocidade linear - A velocidade linear (V) de um ponto da roda é dada por:
V = (deslocamento escalar)/(intervalo de tempo) = s/t … (m/s)
e) Relações fundamentais - Quando a velocidade angular (w) é constante cada ponto da roda, que dista R do centro, descreverá seu movimento circular e uniforme; valem:
= /t = 2/T = 2fV = s/t = 2R/T = 2f.R
V = .R
Dinâmica dos acoplamentos
Tendo-se sempre em vista a conservação do trabalho nas máquinas simples vamos examinar as forças, deslocamentos e velocidades postas em jogo no acoplamento de rodas.
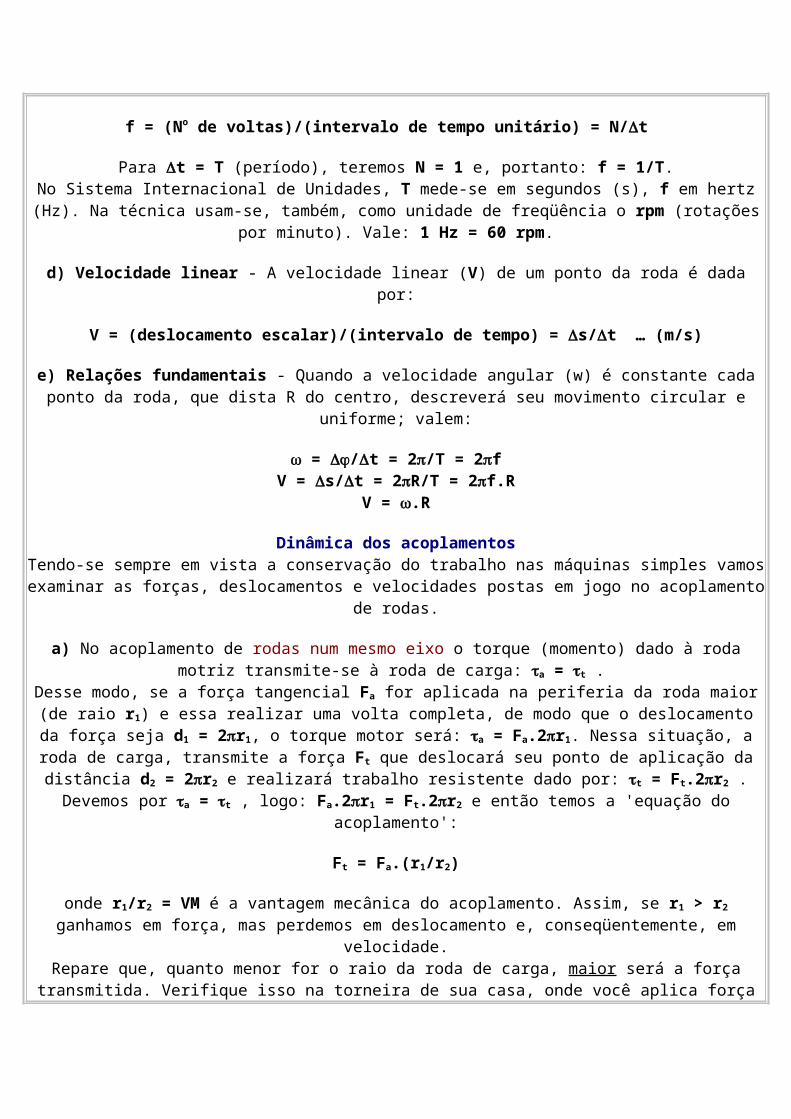
a) No acoplamento de rodas num mesmo eixo o torque (momento) dado à roda motriz transmite-se à roda de carga: a = t .
Desse modo, se a força tangencial Fa for aplicada na periferia da roda maior (de raio r1) e essa realizar uma volta completa, de modo que o deslocamento da força seja d1 = 2r1, o torque motor será: a =
Fa.2r1. Nessa situação, a roda de carga, transmite a força Ft que deslocará seu ponto de aplicação da distância d2 = 2r2 e realizará trabalho resistente dado por: t = Ft.2r2 . Devemos por a = t , logo:
Fa.2r1 = Ft.2r2 e então temos a 'equação do acoplamento':
Ft = Fa.(r1/r2)
onde r1/r2 = VM é a vantagem mecânica do acoplamento. Assim, se r1 > r2 ganhamos em força, mas perdemos em deslocamento e, conseqüentemente, em velocidade.
Repare que, quanto menor for o raio da roda de carga, maior será a força transmitida. Verifique isso na torneira de sua casa, onde você aplica força na roda maior para fazer
girar, com facilidade, a roda menor (que é o próprio 'tarugo' de latão onde se fixa a roda maior). Do mesmo modo funciona a maçaneta de sua porta.
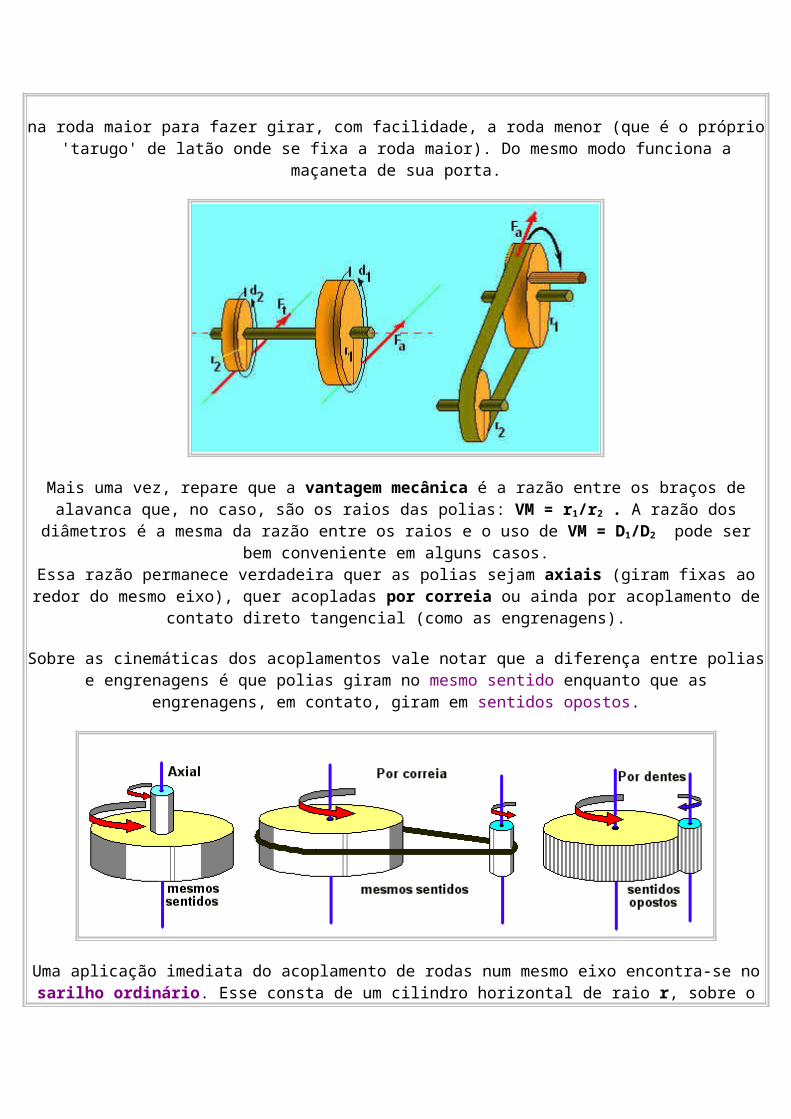
Mais uma vez, repare que a vantagem mecânica é a razão entre os braços de alavanca que, no caso, são os raios das polias: VM = r1/r2 . A razão dos diâmetros é a mesma da razão entre os raios e o uso
de VM = D1/D2 pode ser bem conveniente em alguns casos.Essa razão permanece verdadeira quer as polias sejam axiais (giram fixas ao redor do mesmo eixo),
quer acopladas por correia ou ainda por acoplamento de contato direto tangencial (como as engrenagens).
Sobre as cinemáticas dos acoplamentos vale notar que a diferença entre polias e engrenagens é que polias giram no mesmo sentido enquanto que as engrenagens, em
contato, giram em sentidos opostos.
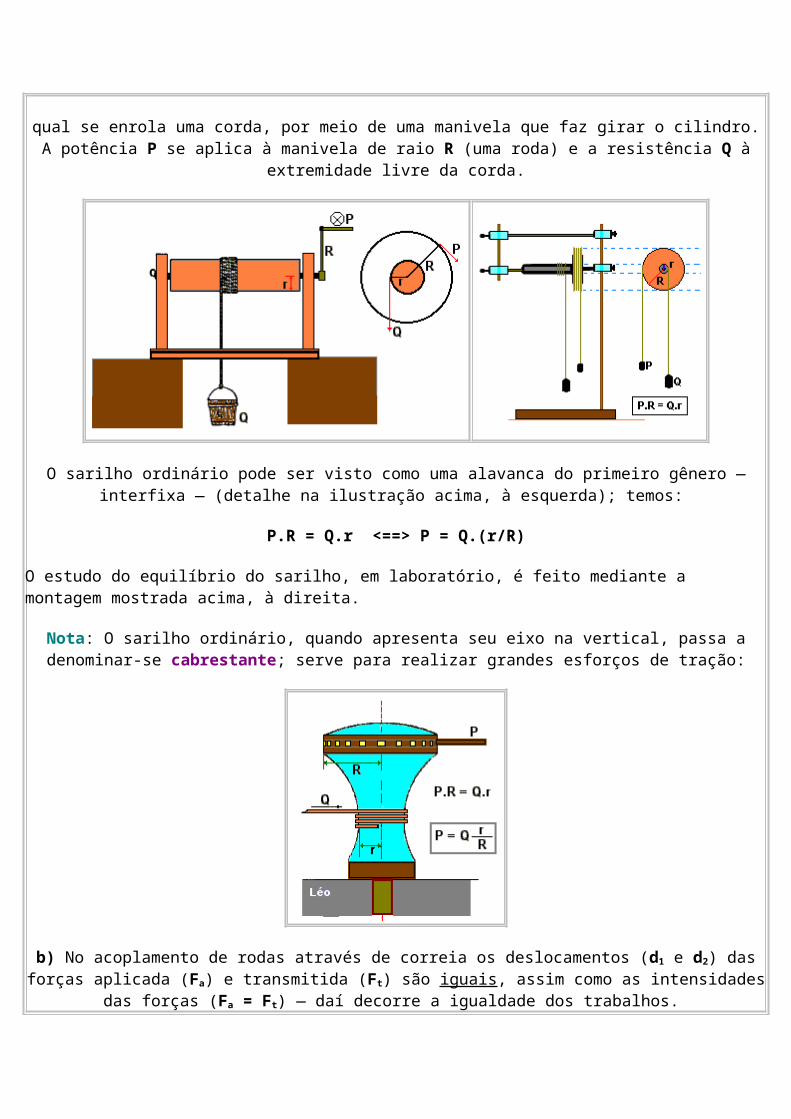
Uma aplicação imediata do acoplamento de rodas num mesmo eixo encontra-se no sarilho ordinário. Esse consta de um cilindro horizontal de raio r, sobre o qual se enrola uma
corda, por meio de uma manivela que faz girar o cilindro. A potência P se aplica à manivela de raio R (uma roda) e a resistência Q à extremidade livre da corda.
O sarilho ordinário pode ser visto como uma alavanca do primeiro gênero — interfixa — (detalhe na ilustração acima, à esquerda); temos:
P.R = Q.r <==> P = Q.(r/R)
O estudo do equilíbrio do sarilho, em laboratório, é feito mediante a montagem mostrada acima, à direita.
Nota: O sarilho ordinário, quando apresenta seu eixo na vertical, passa a denominar-se cabrestante; serve para realizar grandes esforços de tração:
b) No acoplamento de rodas através de correia os deslocamentos (d1 e d2) das forças aplicada (Fa) e transmitida (Ft) são iguais, assim como as intensidades das forças (Fa = Ft) — daí decorre a igualdade
dos trabalhos. Por vezes é difícil perceber isso de imediato. Vamos analisar:
1.- a correia, sob tensão, aplica exatamente a mesma força sobre as periferias das rodas, daí a igualdade das forças;
2.- para os deslocamento teremos (para uma volta completa da roda maior): d1 = 2r1 e d2(total) = x.2r2
onde x = 2r1/2r2 = r1/r2, logo: d2(total) = (r1/r2).2r2 = 2r1. Realmente, d1(1 volta) = d2(total). Todavia, perceba que d2(total) encerra x voltas da roda menor.
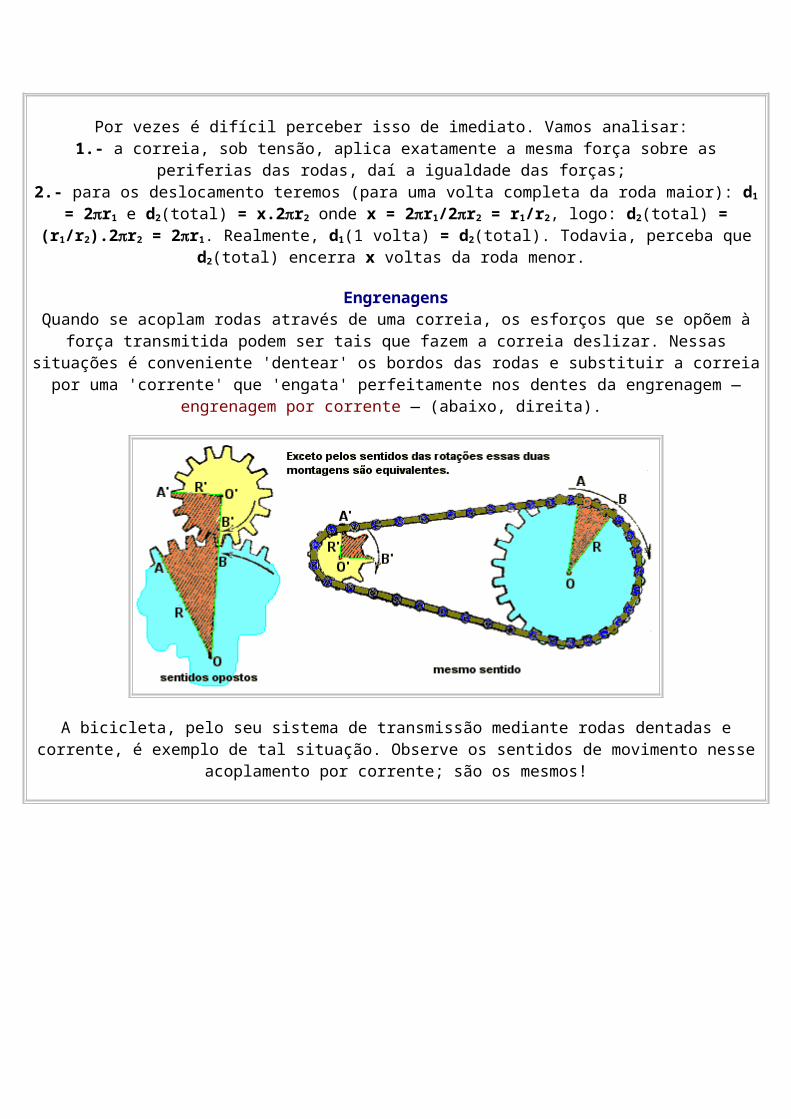
EngrenagensQuando se acoplam rodas através de uma correia, os esforços que se opõem à força
transmitida podem ser tais que fazem a correia deslizar. Nessas situações é conveniente 'dentear' os bordos das rodas e substituir a correia por uma 'corrente' que 'engata'
perfeitamente nos dentes da engrenagem — engrenagem por corrente — (abaixo, direita).
A bicicleta, pelo seu sistema de transmissão mediante rodas dentadas e corrente, é exemplo de tal situação. Observe os sentidos de movimento nesse acoplamento por
corrente; são os mesmos!
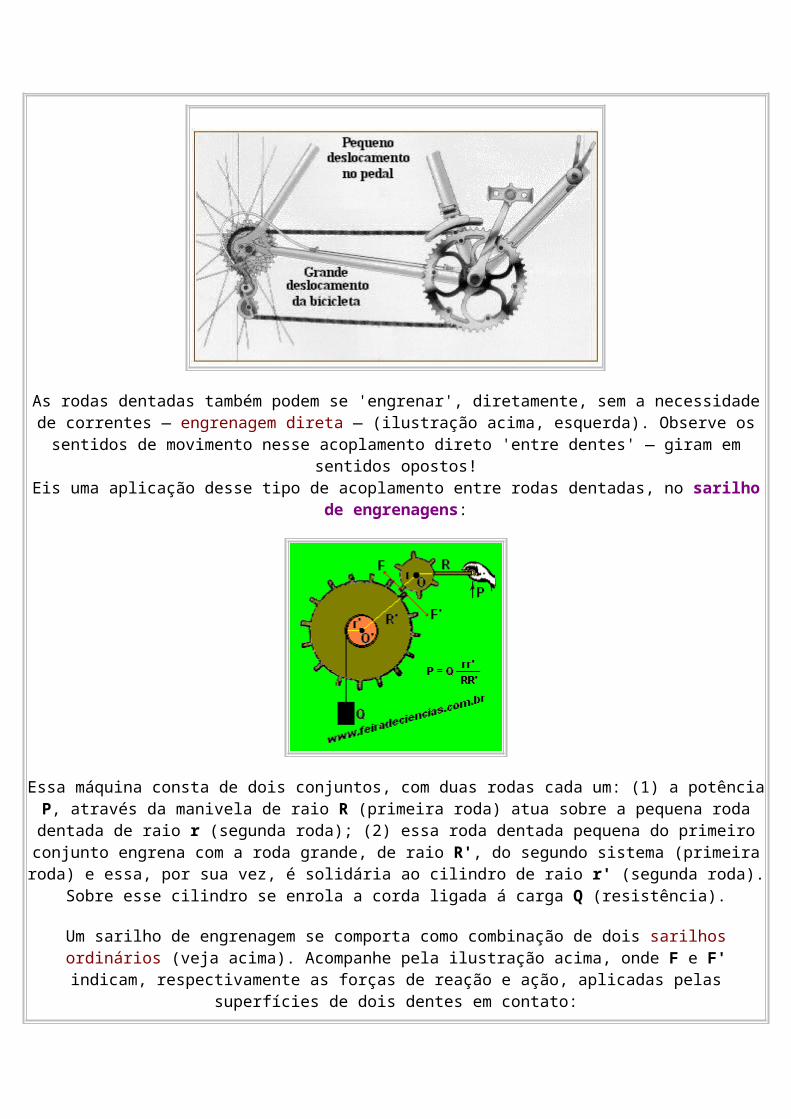
As rodas dentadas também podem se 'engrenar', diretamente, sem a necessidade de correntes — engrenagem direta — (ilustração acima, esquerda). Observe os sentidos de
movimento nesse acoplamento direto 'entre dentes' — giram em sentidos opostos!Eis uma aplicação desse tipo de acoplamento entre rodas dentadas, no sarilho de
engrenagens:
Essa máquina consta de dois conjuntos, com duas rodas cada um: (1) a potência P, através da manivela de raio R (primeira roda) atua sobre a pequena roda dentada de raio r (segunda roda); (2)
essa roda dentada pequena do primeiro conjunto engrena com a roda grande, de raio R', do segundo sistema (primeira roda) e essa, por sua vez, é solidária ao cilindro de raio r' (segunda roda). Sobre esse
cilindro se enrola a corda ligada á carga Q (resistência).
Um sarilho de engrenagem se comporta como combinação de dois sarilhos ordinários (veja acima). Acompanhe pela ilustração acima, onde F e F' indicam, respectivamente as forças de reação e ação,
aplicadas pelas superfícies de dois dentes em contato:(a) o equilíbrio do primeiro conjunto de rodas será dado por: P.R = F.r e,(b) o equilíbrio do segundo conjunto de rodas será dado por: Q.r' = F'.R'.
Dividindo-se essas duas expressões membro a membro e lembrando que F = F' (ação e reação) vem:
P.R/Q.r' = F.r/F'.R' ou (P/Q)(R/r') = r/R'

P = Q.(rr')/(RR')
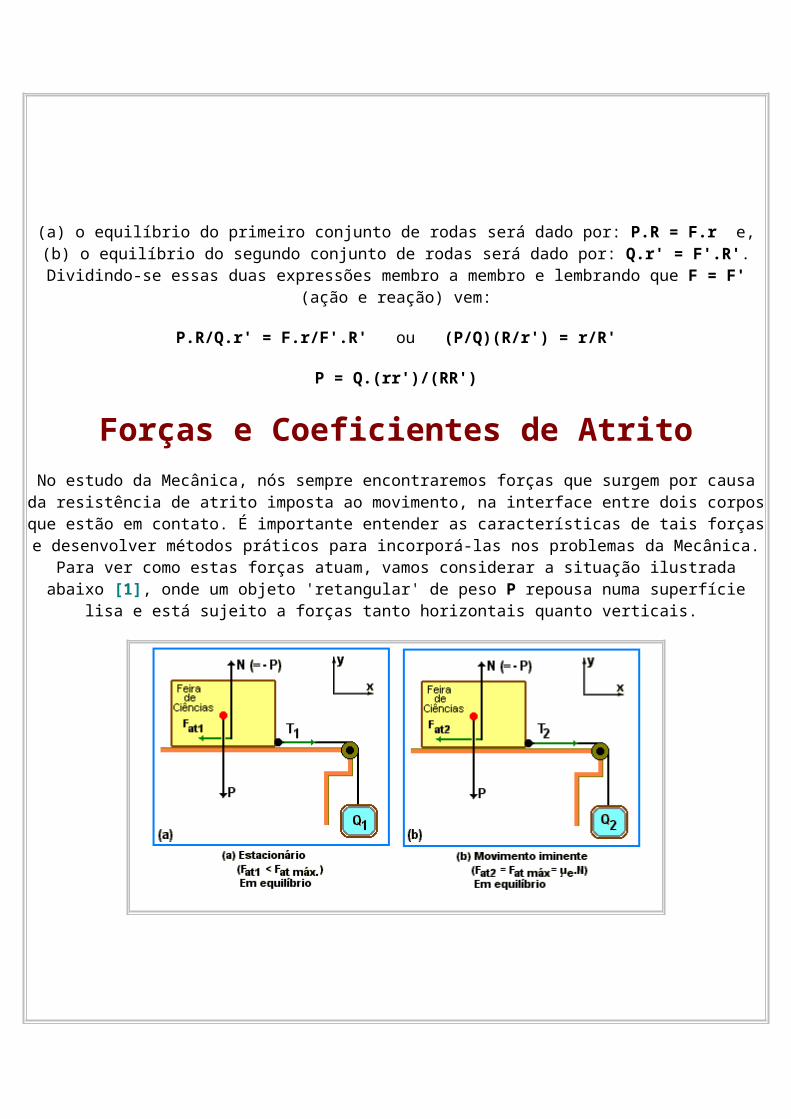
Forças e Coeficientes de AtritoNo estudo da Mecânica, nós sempre encontraremos forças que surgem por causa da
resistência de atrito imposta ao movimento, na interface entre dois corpos que estão em contato. É importante entender as características de tais forças e desenvolver métodos
práticos para incorporá-las nos problemas da Mecânica. Para ver como estas forças atuam, vamos considerar a situação ilustrada abaixo [1], onde um objeto 'retangular' de peso P repousa numa superfície lisa e está sujeito a forças tanto horizontais quanto verticais.
[1] Sistema de forças atuando num objeto em repouso, numa interface na qual as forças de atrito estão presentes. Quatro diferentes possibilidades podem aparecer,
correspondentes aos casos (a), (b), (c) e (d) ilustrados acima.
O modo mais fácil de se analisar o que está acontecendo é, como é usual, considerar cada parte do sistema como um corpo livre isolado e descrever como todas as forças estão
atuando em cada um desses corpos. O procedimento usado para que isto seja feito neste caso é mostrado a seguir [2], onde todas as forças sobre ambos os blocos, apoiado e
suspenso, são mostradas.
[2] Diagramas de corpos livres (a) e (b).
[2] O conjunto de forças que atuam (a) no corpo ilustrado acima [1], visto como um corpo livre isolado, e (b) no bloco suspenso, considerado do mesmo modo.
Nestes diagramas, a tensão na corda é representada pelos vetores T, que atua na direção x horizontal, no objeto apoiado e T’ atuando na direção y vertical, no objeto suspenso, de peso Q. Se o peso da
corda for desprezado (como será), a intensidade de T' será a mesma de T. A roldana serve apenas para mudar o sentido no qual a tensão atua e de maneira nenhuma altera seu módulo [*]. Também, neste
exemplo, supõe-se que a interface entre o bloco apoiado e a superfície que o apóia não seja perfeitamente escorregadia e então as forças de atrito que surgem do bloco apoiado e da superfície na
qual ele repousa estão presentes.
[*] Esta afirmação é verdadeira apenas quando os efeitos de atrito e efeitos de inércia associados à roldana puderem ser negligenciados, e sempre suporemos que este é o caso, a menos que uma afirmação contrária seja feita.
As forças de atrito entre o objeto apoiado e a superfície surgem das forças interatômicas ou intermoleculares entre as duas superfícies. Uma descrição exata do atrito em termos destas forças é muito complexa e não pode ser tratada em detalhes aqui. Além do mais, embora as superfícies em
contato possam parecer muito lisas e planas, numa escala atômica uma ordem tal de lisura raramente pode ser obtida, e nesta escala as superfícies são irregulares e ásperas com 'pontos' altos e baixos.
Como resultado, a área real de contato (medida da superfície total dos contatos) entre os dois objetos ocorre apenas em pontos relativamente pequenos onde pontos altos em ambas as superfícies estão
opostos uns aos outros; assim, a área de contato não tem relação direta com a área total de superfície da base do objeto apoiado, mas na realidade é muito menor. A pressão nos pontos reais de contato é,
portanto, muito grande e suficiente em muitos casos para unir as duas superfícies juntas (caso do contato do vidro plano sobre vidro plano). A força máxima de atrito que pode ser suportada pela
interface é a força necessária para quebrar estas uniões microscópicas. Se o contato for deslizante, formam-se e quebram-se ligamentos continuamente, e o material pode ser transferido de uma superfície para outra no processo. Verificou-se que os mesmos efeitos exercem um papel importante nas forças de atrito, associados ao contato de rolamento entre dois corpos. Neste caso, a área real de contato é ainda menor e, em conseqüência, o atrito de rolamento é ordinariamente menor que o atrito de deslizamento entre os mesmos materiais. No caso do atrito de rolamento, contudo, a deformação do objeto que rola
sob as forças que atuam sobre ele também pode ser importante na determinação da grandeza das
forças de atrito.
Vê-se claramente que os mecanismos físicos relevantes para os efeitos de atrito estão completamente envolvidos, e uma descrição analítica destes efeitos em termos fundamentais é comumente muito
complicada. É muito simples, contudo, descrever como as forças de atrito atuam, sem haver necessidade de citar (ou até mesmo conhecer) os mecanismos físicos responsáveis pela ação delas.
Isto pode ser efetuado meramente observando-se que tem sido averiguado experimentalmente que uma força de atrito existe entre um objeto e a superfície sobre a qual ele repousa. A maneira pela qual esta
força age depende de o corpo estar em repouso (atrito estático) ou deslizando sobre a superfície abaixo dele (atrito cinético). Em todos os casos, contudo, sua direção fica no plano da interface entre o corpo e
a superfície na qual ele repousa, como mostrado nas ilustrações [1].
No caso do atrito estático,,já que o corpo está em equilíbrio implícito, a soma vetorial de todas as forças sobre ele deve ser zero. Isto significa que a força de atrito deve ser igual em módulo e direção e oposta em sentido em relação à resultante de todas as outras forças que atuam no objeto. Mas a força de atrito
estático pode apenas chegar à sua maior grandeza (valor) antes do corpo “quebrar as arestas” e começar a deslizar. O valor da maior força de atrito possível (Fat máx.) é diretamente proporcional ao valor
da componente de força exercida pelo plano de apoio no corpo que é normal ao atrito da interface, usualmente referida como a força normal N. Estas forças estão ilustradas, no caso mais simples
possível, em [2] . Conseqüentemente, o valor da força máxima possível do atrito estático pode ser escrita como:
Fat máx. = e.N [eq.1] … Lei de Coulomb-Morin …
onde e é uma constante de proporcionalidade, chamada coeficiente de atrito estático. Seu valor, obviamente, depende dos materiais que estão em contato com a interface e ainda, de sua aspereza ou lisura. É preciso menos intensidade de força para superar as intensidades de forças de atrito entre um pedaço de gelo e uma superfície de madeira que aquelas existentes quando um bloco de madeira que tem o mesmo peso é colocado em lugar do primeiro. Uma vez que o coeficiente de atrito associado a uma dada interface de atrito é conhecido, o valor da força estática máxima que ele suportará antes de
“quebrar as arestas” e começar a deslizar pode ser avaliado pela [eq.1]. Em qualquer situação onde as forças de atrito estático atuam, a condição do sistema é de equilíbrio, no qual as forças que atuam, incluindo a força de atrito estático, são determinadas pela aplicação usual da primeira lei de Newton. Não existe realmente nada novo envolvendo isto, exceto relembrar-se que em todos os casos o valor calculado da força de atrito tem que ser menor ou igual ao valor da Fat máx. dado por [eq.1]. A força de atrito estático não precisa, por conseguinte, ser igual a e.N. Pode muito bem ser menor que este valor, mas não maior. Assim, a [eq.1] permite-nos determinar os limites nos quais as
forças de atrito estático podem atuar para manter um sistema no estado de equilíbrio estático.
No caso do atrito cinético, no qual o objeto não está em repouso mas está deslizando sobre a superfície de suporte, a força de atrito atua sobre o objeto que desliza no plano da interface de atrito, em sentido
oposto àquele de seu movimento. Sua grandeza (valor) é novamente proporcional àquela da força normal N, mas o coeficiente de proporcionalidade entre a força do atrito de deslizamento difere do
coeficiente do atrito estático que determina a força máxima que a mesma interface pode suportar em equilíbrio estático. De fato, a força de atrito cinético que atua quando um corpo desliza sobre uma superfície de suporte é quase invariavelmente menor que a força máxima de atrito estático que a mesma interface pode suportar. Nós podemos, portanto, expressar a força de atrito cinético por:
Fat cin. = c.N [eq.2]
onde c é uma constante de proporcionalidade referida como o coeficiente de atrito cinético associado com o tipo específico de interface de atrito envolvido. Já que a intensidade da força de atrito de
deslizamento c.N é menor que a intensidade da força estática máxima e.N necessária para “quebrar as quinas", é claro que para uma dada interface, c será sempre menor que e. Também, já que a força de atrito cinético entre um objeto e a superfície sobre a qual ele desliza é praticamente independente de
sua velocidade (constatação experimental), o coeficiente de atrito cinético é essencialmente independente da velocidade do corpo com respeito à superfície.
Uma descrição tal como esta dada acima, estabelecida em termos de observações experimentais mais do que em princípios fundamentais, é chamada uma descrição empírica. Os coeficientes de atrito
estático e cinético e e c, que entram na descrição, não podem ser calculados de modo nenhum, exceto se lançarmos mão de argumentos muito difíceis envolvendo forças intermoleculares previamente
esboçadas. No entanto, eles podem ser medidos experimentalmente com muita facilidade para todos os pares concebíveis de substâncias as quais podem formar uma interface de atrito, e estes valores
medidos podem ser tabulados e referidos/usados quando necessário. Já que os coeficientes de atrito são as razões das intensidades de duas forças (Fat/N), eles são adimensionais.
As leis que governam as forças de atrito estabelecidas acima são aproximadas, e não exatas. Em particular, o coeficiente de atrito cinético pode realmente variar com a velocidade se um grande intervalo
de velocidade está envolvido, embora a suposição que isto não ocorra seja usualmente muito boa quando se trata de um intervalo moderado de velocidades. O coeficiente de atrito estático e é sempre
maior que o coeficiente de atrito cinético c, porque é possível verificar-se invariavelmente que para qualquer sistema uma força maior é requerida para “quebrar arestas” do que para manter um
deslizamento constante ou movimento rolante.
Vamos agora retornar aos sistemas mostrados nas ilustrações [1] e examinar em detalhes o que acontece em cada caso ilustrado, usando a técnica dos corpos livres isolados descrita anteriormente.
Na ilustração [2b], na qual o bloco de peso Q é ilustrado como um corpo livre isolado, é evidente que se este objeto está em equilíbrio, então, a soma de todos os componentes segundo x, y e z das forças que atuam sobre ele deve igualar-se a zero. Como as forças que atuam no bloco têm apenas componentes
segundo y, podemos escrever:
Fy = T' - Q = 0 … [eq. 3]
donde Q = T' = T … [eq. 4]
já que, como foi mencionado previamente, T’ e T são iguais em valor. A tensão na corda é então igual a Q, como se pode esperar em equilíbrio. Considerando o bloco retangular agora como um corpo isolado,
como está na ilustração [2a], e escrevendo as equações para o equilíbrio das forças aplicadas a este objeto, obtemos:
Fx = T - Fat = 0 e Fy = N - P = 0 … [eq.5]
Nestas equações, Q pode ser considerado como dado e sabe-se que T é igual a Q, da [eq. 4]. Nós estamos então confrontando-nos com um grupo de duas equações simultâneas as quais podem ser
resolvidas para as duas incógnitas Fat e N, para dar:
Fat = T = Q e N = P … [eq. 6]
A força de atrito é igual ao peso suspenso Q, e o valor da força normal N que o plano de suporte exerce no bloco sustentado é simplesmente P, o peso do objeto sustentado.
Ao escrever a primeira das equações [eq.5], note que assumiu-se que a força de atrito estava no plano de atrito da interface. Neste exemplo, supõe-se que o sistema esteja em equilíbrio sob a ação de todas estas forças e, portanto, é claro que Q deve ser menor que e.N (portanto, menor que e.P), porque de acordo com as leis que descrevem as forças de atrito, a força de atrito pode ter qualquer valor menor
que e.N, mas não pode exceder e.N.
O que comentamos baseando-nos nas ilustrações [2a],[2b] é justamente o que está ocorrendo na ilustração [1a], onde Q = Q1, T = T1 e Fat = Fat1 .
Falemos agora do que acontece na ilustração [1b], onde alguma massa extra foi progressivamente acrescentada ao bloco suspenso (que atingirá o valor final Q2) até chegarmos à situação na qual a força
de atrito assume o valor Fat2 = e.N = Fat máx. .
O sistema ainda está em equilíbrio (estático), embora esteja no limite extremo no qual o equilíbrio pode ser mantido pela força de atrito, e o movimento é iminente. As equações de equilíbrio são as mesmas
de antes, efetuando-se apenas substituição das legendas, e teremos:
Fat2 = Fat máx. = e.N = T2 e T2 = Q2 … [eq. 7]
Mas, já que N = P (equilíbrio segundo y), é evidente que também Q2 = e.P.
Se o peso suspenso exceder este valor, o equilíbrio não pode ser mais mantido e o objeto “quebra as arestas” e desliza com aceleração não nula ao longo da direção y.
Existe ainda um outro modo segundo o qual o sistema pode estar em equilíbrio. Se um valor adequado Q3 para o peso suspenso for selecionado, a tensão na corda flexível será suficiente para equilibrar a
força de atrito cinético que surge quando o objeto sustentado desliza com velocidade constante ao longo da superfície de apoio, como é ilustrado na [1c]. Já que o sistema ainda está em equilíbrio (dinâmico) sob estas circunstâncias, as equações de equilíbrio geral [eq. 5] são ainda aplicáveis, com a condição
de que Q seja substituído por Q3 , Fat por Fat3 = c.N e T por T3. Outra vez, o procedimento do corpo isolado aplicado ao peso suspenso leva-nos a concluir que T3 = Q3,
enquanto que as equações de equilíbrio do corpo apoiado levam a:
Fat3 = Fat cin. = c.N = T3 e T3 = Q3 … [eq. 8]
Também, já que N = P, é fácil ver que Q3 = c.P.
Já que c é menor que e, Q3 será menor que Q2, como é dado por [eq. 7], requerida para superar a
força máxima possível de atrito estático e mover o sistema do repouso. Portanto, é possível também que o sistema esteja em equilíbrio, em repouso, quando o peso suspenso for Q3.
Existem, então, dois estados de equilíbrio 'críticos' possíveis, um no qual o sistema está em repouso, aparecendo como um caso especial da situação ilustrada em [1a] e discutido em [1b] juntamente com as (eq. 5) e no qual Q2 tem o valor e.P; e um outro no qual o sistema desliza à direita com velocidade
constante [1c], como foi discutido logo acima, onde Q3 = c.P.
Para se efetuar uma transição entre estes dois estados, deve ser aplicada uma força externa. Por exemplo, se o sistema estiver inicialmente em repouso (por exemplo, como em
[1a] substituindo-se Q1 por Q3), pode ser posto em movimento por um toque de mão (ou dar 'piparotes' sobre a mesa de apoio), e então persistirá em movimento com velocidade
constante até que seja parado por uma outra força aplicada externamente. Tal sistema que tem dois estados de equilíbrio é comumente chamado de sistema
duplamente estável. Os sistemas que têm três ou, ainda, muitos estados de equilíbrio não são absolutamente incomuns. Para tais sistemas desenvolve-se um novo campo de estudos
denominado estabilidade de equilíbrio. Um outro exemplo familiar de um sistema duplamente estável está mostrado em ambos seus estados de equilíbrio na ilustração [3] a
seguir.
Continuemos. Se o peso do corpo suspenso exceder o valor de Fat máx. então a força T exercida pela corda flexível será maior que a força máxima de atrito que possa existir na interface de atrito. Sob estas circunstâncias, a soma das componentes segundo x das forças que atuam sobre o objeto sustentado possivelmente não pode ser zero, mas a soma deve, ao invés disso, dar uma força resultante total ao longo da direção x. O corpo não estará mais em equilíbrio e, de acordo com a segunda lei de Newton,
deverá experimentar uma aceleração ao longo do eixo x em resposta à força resultante. Se o peso do objeto suspenso (Q) for menor que e.P mas maior que c.P, o corpo sustentado estará
em equilíbrio se ele estiver em repouso, porque uma força de atrito estático maior que e.P pode então ser mantida para contrabalançar a tensão na corda. Se o objeto for posto em movimento ao longo da
direção positiva do eixo x, contudo, a força máxima de atrito cinético que pode ser mantida pelo contato do deslizamento é c.P, e isto é insuficiente para contrabalançar a tensão na corda e tornar a força
resultante igual a zero. Ao invés disso, uma força resultante atuará ao longo da direção x sobre o corpo sustentado, a qual causa novamente uma aceleração naquela direção. Esta situação está ilustrada na
[1d].
Por ora,já que estamos interessados primariamente em conhecer como os sistemas em equilíbrio se comportam, nós não nos dedicaremos à discussão sobre o que acontece quando o sistema não está
mais em equilíbrio, e retornaremos a este assunto em outro trabalho, na Sala de Dinâmica





























