Embed Size (px)
Citation preview

Prof. Eduardo Henrique Couto
Sistemas de Controle (CON)
Modelagem de Sistemas de Rotação e Eletromecânicos
Aula 03 e 04 2014/2
Universidade do Estado de Santa Catarina – UDESCCentro de Ciências Tecnológicas – CCT
Departamento de Engenharia Mecânica – DEM

Sistemas mecânicos de rotação Engrenagens ideais Sistemas eletromecânicos Sistemas de nível de líquido Sistemas térmicos Exemplos
Plano de Aula2

Lei fundamental da mecânica de rotação
Sistemas Mecânicos de Rotação3

Sistema torque - momento de inércia
: vetor aceleração angular resultante em função do tempo
: vetor velocidade angular resultante em função do tempo
: vetor deslocamento angular resultante em função do tempo
: vetor torque resultante em função do tempo : momento de inércia total do eixo
Sistemas de Rotação Básicos4

Sistema torque - mola
: vetor aceleração angular resultante em função do tempo
: vetor velocidade angular resultante em função do tempo
: vetor deslocamento angular resultante em função do tempo
: vetor torque resultante em função do tempo : constante elástica de torção da mola
Sistemas de Rotação Básicos5

Sistema torque - amortecedor
: vetor aceleração angular resultante em função do tempo
: vetor velocidade angular resultante em função do tempo
: vetor deslocamento angular resultante em função do tempo
: vetor torque resultante em função do tempo : constante de atrito viscoso do amortecedor
Sistemas de Rotação Básicos6

Supostas rígidas Não possuem atrito Não possuem momento de inércia
Rotação - Engrenagens Ideais7

Rotação:
Conjugado:
Potência:
: vetor velocidade angular em função do tempo : vetor velocidade no ponto de contato em função do
tempo : vetor torque em função do tempo : vetor força no ponto de contato em função do tempo : número de dentes da engrenagem : raio da engrenagem
Rotação - Engrenagens Ideais8

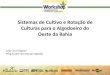
Exemplo 1
Na figura, temos a representação de um sistema de rotação dotado de um jogo de engrenagens supostas ideais. Os vetores de movimento e as constantes envolvidas, bem como o torque (conjugado motor) , que age sobre o primeiro rotor, estão devidamente indicados. Note que o segundo eixo, ao contrário do primeiro que é rígido, apresenta uma constante elástica de torção . Desenvolva as equações que modelam esse sistema.
Sistemas Mecânicos de Rotação9

Associação de dispositivos elétricos ou eletromagnéticos com dispositivos mecânicos.
Variáveis de entrada e saída:
Exemplo clássico: alto-falante
Sistemas Eletromecânicos10
Grandeza ElétricaGrandeza Mecânica

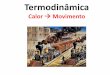
Servomotor de corrente contínua controlado pelo circuito de armadura
: vetor corrente de armadura : vetor força eletromotriz : vetor velocidade angular resultante : vetor conjugado motor (torque) : momento de inércia do motor : constante de ganho do motor : constante de atrito viscoso do motor
Sistemas Eletromecânicos11

Equação do circuito de armadura
Equação da força eletromotriz induzida
Equação do conjugado eletromagnético
Equação do conjugado eletromecânico
Sistemas Eletromecânicos12

Funcionamento em regime permanente
Sistemas Eletromecânicos13

Característica de conjugado em regime permanente
Sistemas Eletromecânicos14

Característica de velocidade em regime permanente
Sistemas Eletromecânicos15

Característica de potência em regime permanente
Sistemas Eletromecânicos16

Exemplo 2
Um servomotor de imã permanente tem resistência de armadura de , conjugado máximo (para ), e tensão nominal de . Determine para essa tensão: a) a velocidade máxima (); b) a característica de conjugado; c) a potência máxima; d) o ponto de operação (, ) para um conjugado de carga constante .
Sistemas Eletromecânicos17

Equação de variação de volume
Sistemas de Nível de Líquidos18

Resistência (de válvulas)
Fluxo Laminar
Fluxo Turbulento
: nível de fluido em função do tempo : vazão de fluido em função do tempo : resistência à passagem de fluido
Elementos Básicos de Nível19

Capacitância (de reservatórios)
Reservatórios com seção transversal constante
: volume de fluido em função do tempo : nível de fluido em função do tempo : área da seção transversal do reservatório : capacitância do reservatório
Elementos Básicos de Nível20

Exemplo 1
Considere o sistema de nível composto por dois tanques, como ilustrado. Adotando os referenciais nulos no ponto de equilíbrio da planta, desenvolva as equações que relacionam a vazão de entrada do primeiro tanque com o nível do segundo tanque.
Sistemas de Nível de Líquidos21

Transferência de calor por condução ou convecção
[kcal/s]
Sistemas Térmicos22

Transferência de calor por condução ou convecção
Coeficiente para condução [kcal/soC]
Coeficiente para convecção [kcal/soC]
: condutividade térmica [kcal/msoC] : área normal ao fluxo de calor [m2] : espessura do condutor [m] : coeficiente de convecção [kcal/m2soC]
Sistemas Térmicos23

Resistência térmica
: diferença de temperatura em função do tempo [oC] : fluxo de calor em função do tempo [kcal/s] : coeficiente de condução ou convecção [kcal/soC] : resistência térmica [oC/kcal]
Elementos Térmicos Básicos24

Capacitância térmica
: massa do meio térmico considerado [kg] : calor específico do meio térmico [kcal/kgoC] : capacitância térmica [kcal/oC]
Elementos Térmicos Básicos25

Exercício 2
Considere um sistema formado por um termômetro de mercúrio de parede muito fina de vidro. Supondo que ele esteja a uma temperatura constante e seja mergulhado em um banho com temperatura obtenha o modelo matemático desse sistema. Estabeleça nesse sentido condições iniciais nulas, ou seja, considere a temperatura inicial do termômetro zero (ou de outro modo, considere a variação de temperatura com relação ao equilíbrio).
Sistemas Térmicos26