Embed Size (px)
Citation preview
Supervised Learning Strategy
of Market Making
Presented byOri Gil
Supervisor : Gal Zahavi
Control and Robotics Laboratory
Winter 2011

Introduce to basic concepts.
Display the main models in the project:Roll model (1984).Glosten-Milgron model (1985).
Implement a profitable automated market maker
in TASE:Basic strategy – trading threshold.Supervised learning strategy – training set and test set.
Simulation on TASE data and conclusions.
Project Overview
Control and Robotics Laboratory 2

Basic Concepts
3Control and Robotics Laboratory
Market Liquidity
Market Making
Bid-Ask Spread

Control and Robotics Laboratory
Price Process
0 1 2 3 4 5 6 71730
1735
1740
1745
1750
1755
1760
1765
t [hours]
Sha
re P
rice
[0.0
1 N
IS]
AskBidPrice
Leumi’s share (03/01/2010)
5
Price Process

Control and Robotics Laboratory
Price Process
0 1 2 3 4 5 6 71730
1735
1740
1745
1750
1755
1760
1765
t [hours]
Sha
re P
rice
[0.0
1 N
IS]
AskBidPrice
Leumi’s share (03/01/2010)
5
2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5
1751.5
1752
1752.5
1753
1753.5
1754
1754.5
1755
t [hours]
Sha
re P
rice
[0.0
1 N
IS]
Ask
BidPrice

The Models
6Control and Robotics Laboratory
ExtendedGM Model
Roll Model (1984)
Glosten-Milgrom Model (1985)
Liquidty Population

Roll Model (1984)
Control and Robotics Laboratory 7

Roll Model (1984)
Control and Robotics Laboratory 8

GM Model (1985)
Control and Robotics Laboratory 9
Market Makers (uninforme
d)
Uninformed Traders
Informed
Traders
Market population
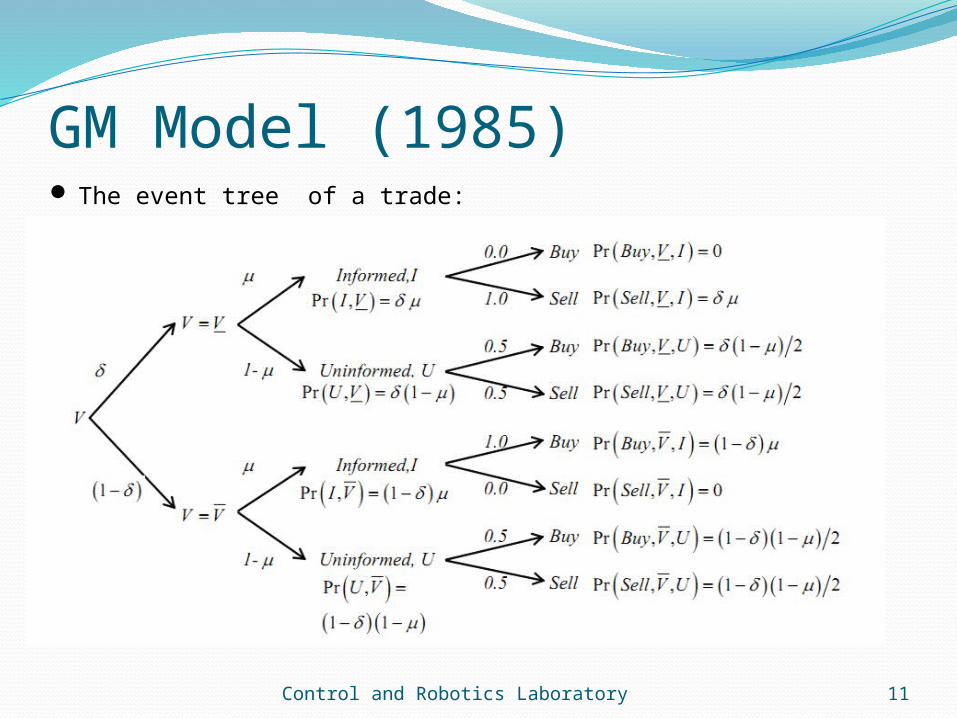
GM Model (1985)
Control and Robotics Laboratory
The event tree of a trade:
11

Analyzing GM Model: Finding The Bid-Ask spread
Control and Robotics Laboratory 12

Market Making Algorithm – Basic approach
13
Control and Robotics Laboratory
Estimating μ from Bid(t-1) and Ask(t-
1)[GM Model]
Submitting bid and ask
orders :Bid(t)=Bid(t-1)Ask(t)=Ask(t-1)
μ ≤ M
μ > M
Cancelling open orders and
holding trade work until new order arrives
Waiting for new order to arrive at the
market μ ? M

14
Control and Robotics Laboratory
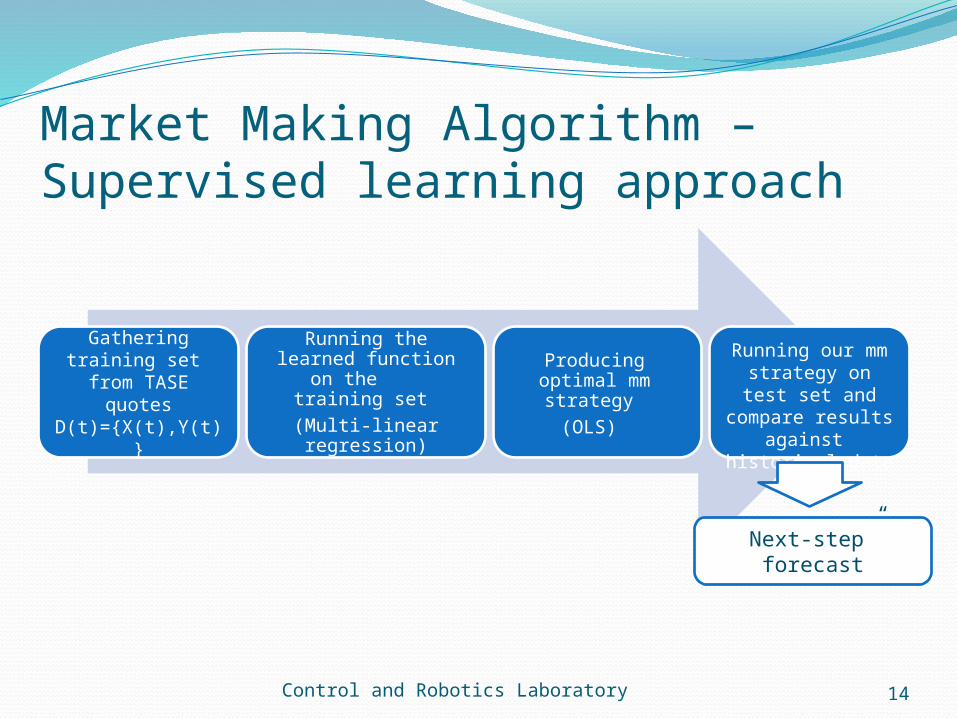
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
Market Making Algorithm – Supervised learning approach

14
Control and Robotics Laboratory
Bid priceAsk price
Informed proportion µV probability δ
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
Market Making Algorithm – Supervised learning approach

14
Control and Robotics Laboratory
Gathering training set
D(t)={X(t),Y(t)}from TASE quotes
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
Running the learned function on the
training set (Multi-linear regression)
Market Making Algorithm – Supervised learning approach

Control and Robotics Laboratory
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
14
Running the learned function on the
training set (Multi-linear regression)
Market Making Algorithm – Supervised learning approach
Market Making Algorithm – Supervised learning approach
Control and Robotics Laboratory
Running our mm strategy on test set and compare results against historical data
Gathering training set
from TASE quotesD(t)={X(t),Y(t)}
Next-step” forecast
14
Running the learned function on the
training set (Multi-linear regression)
Producing optimal mm
strategy (OLS)

Control and Robotics Laboratory
0 1 2 3 4 5 6 71730
1735
1740
1745
1750
1755
1760
1765
1770
t [hours]
Pric
e [0
.01
NIS
]
PriceV
high
Vlow
0 1 2 3 4 5 6 70
20
40
60
80
t [hours]
[%
]
Proportion of informed traders
0 1 2 3 4 5 6 720
40
60
80
100
t [hours]
1-
[%]
probabilty of Vhigh
15
Parameters Measure – GM+Roll

Market Making - Basic Strategy
Control and Robotics Laboratory 16
“Next-step” Forecast

Control and Robotics Laboratory
Training
0 0.2 0.4 0.6 0.8 1 1.2 1.41732
1734
1736
1738
1740
1742
1744
1746
1748
1750Bid Regression
t [hours]
Price [
0.0
1 N
IS]
Training output
Training predicted
0 0.2 0.4 0.6 0.8 1 1.2 1.41735
1740
1745
1750Ask Regression
t [hours]
Price [
0.0
1 N
IS]
Training output
Training predicted
Test
1 2 3 4 5 6 71744
1746
1748
1750
1752
1754
1756
1758
1760
1762
1764Bid Regression
t [hours]
Price [
0.0
1 N
IS]
Test output
Test predicted
1 2 3 4 5 6 71746
1748
1750
1752
1754
1756
1758
1760
1762
1764
1766Ask Regression
t [hours]
Price [
0.0
1 N
IS]
Test output
Test predicted
17
Supervised Learning Strategy

Control and Robotics Laboratory 18
“Next-step” Forecast
Supervised Learning Strategy
ConclusionsKnowing informed traders population at the market
improves our market making performance.
Adding supervised learning solution to the model showed even better performance.
The project has shown success in bringing learning techniques to building market-making algorithms.
Future extensions of this study may include the refinement of the learning techniques.
19Control and Robotics Laboratory

BIBLIOGRAPHY Cont R., Stoikov S. and Talreja R., 2010, "A Stochastic Model for Order Book Dynamics,
Operations Research, 58, pp. 549–563.
Das, S., 2005. "A Learning Market-Maker in the Glosten-Milgrom Model" Quantitative Finance, 5, 169-180.
Glosten L. R., and P. R. Milgrom, 1985, “Bid, Ask and Transaction Prices in a Specialist Market with Heterogeneously Informed Traders,” Journal of Financial Economics, 14, 71–100.
Huang, R.D. and H. R. Stoll, 1997, “The components of the bid-ask spread: A General approach”, Review of Financial Studies 10, 995-1034.
Roll, R., 1984, “A Simple Implicit Measure of the Effective Bid-Ask Spread in an Efficient Market”, Journal of Finance, 39, 1127–1139.
TASE website, http://www.tase.co.il/TASEEng/Homepage.htm.
20Control and Robotics Laboratory

Thank You!
Questions?
Control and Robotics Laboratory





























