Embed Size (px)
Citation preview

iNTERNAT1ONAI JOIJRNAL FOR NUMERICAL METHODS IN ENGINEERING, VOL. 28, 1299-1 316 (19893
IONED CONJUGATE- AND SECANT-NEWTON NON-LINEAR PROBLEMS
M. PAPADRAKAKIS* AND C . J. GANTES'
Institute of Struilural Analysis and Aseisrnic Research, National 7echnical University, Athens 157 73, Greece
SUMMARY
The preconditioned conjugate gradient (CG) method is becoming accepted as a powerful tool for solving the linear systems of equations resulting from the application of the finite element method. Applications of the non-linear algorithm are mainly confined to the diagonally scaled CG. In this study the coupling of preconditioning techniques with non-linear versions of the conjugate gradient and quasi-Newton methods creates a set of conjugate- and secant-Newton methods for the solution of non-linear problems. The preconditioning matrices used to improve the ellipticity of the problem and to reduce the computer storage requirements are obtained by the application of the partial preconditioning and the partial elimination techniques. Both techniques use a drop-off parameter $ to control the computer storage demands of the method, making it more versatile for any computer hardware environment. Consideration is given to the development of a highly effective stability test for the Line search minimization routine, which computcs a.ccurate values without much effort. This results in a beneficiary effect not only on the convergence properties of the methods but on their efficiency as well.
INTRODUCTION
The equations governing the non-linear behaviour of a stable structural system, using the displacement-based finite element discretization of self-adjoint differential equations, can be derived from the minimization of the total potential energy function, which is bounded and twice continuously differentiable. One of the most commonly used methods i s the Newton method, which takes full advantage of first and second derivative information about the function to be minimized and possesses in general ideal characteristics of local convergence and stability.
For large problems, however, the solution of the governing simultaneous equilibrium equations at each linearized Newton step may be very costly or may involve too much storage for the direct solution, even for modern main frame computer systems. A similar situation can also occur for medium sized problems, especially if the analysis is performed on one of the new mini or micro computers, which are becoming more and more popular within the engineering community. To allcviate these deficiencies the modified-Newton method is frequently used, in conjunction with a line search. to accelerate the convergence properties and enhance the stability of the method together with an incremcntal loading procedure.
In an effort to minimize computer storage requirements iterative methods have also been used for the solution of the linearized problem at each Newton step. They are based upon the idea of
*Associate Professor 'Research Associate
OO2Y-598 1/89/O61299 18SO9.00 (0 1989 by John Wiley & Sons, Ltd.
Received 15 August 1987 Revised 1 November 1988

1300 M PAPADRAKAKIS AND C J GANTFF
truncating the linear iterations when far from the solution and gradually increasing their accuracy as the non-linear solution is approa~hed. ' -~ Recently4 the use of the truncated partially preconditioned CG inside the Newton step in conjunction with a line search routine has proved to be a very efficient combination for solving large finite element non-linear problems.
Another way to proceed to the solution of non-linear equations is to employ non-linear versions of pure iterative methods such as the dynamic relaxation and the conjugate gradient methods also called vector iteration methods5 The advantages of using such methods are mainly their low computer storage demands and ease of implementation. Indeed, no tangent stiffness matrix need be formed, stored or factorized during the solution. Unfortunately such methods are very sensitive to the conditioning of the problem. Ill-conditioned problems tend to give extremely poor convergence rates. Therefore, large problems, inherently poor-conditioned, are not effectively handled with the pre-cited methods, despite their advantageous matrix handling properties. Another reason why the CG method has been accepted with scepticism as a non-linear equation solver (in contrast to its broader application in linear problems) is the cost involved in the one- dimensional minimization which is required in each iteration in non-linear problems. The cost for an exact evaluation in the line searches may well dominate the cost of the whole minimization process, while an inexact line search may cause slow convergence or no convergence a t all.
Recent trends in the field of unconstrained optimization tend to concentrate efforts on algorithms based on CG with the technique of preconditioning for improving the ellipticity of the problem"' and on gradient algorithms not requiring exact line searches for the creation of the descent direction.'-' Some more recent developments have combined preconditioning techni- ques with inaccurate line searches resulting in some form of quasi-Newton methods bearing more relation to the modified-Newton methods than to variable metric methods with respect to the way they handle the dominant matrix of the iteration process.l29 ' 3
in this paper non-linear versions of conjugate-gradient-like methods that do not require accurate line searches are coupled with the idea of partial p r e ~ o n d i t i o n i n g ~ ~ ~ ~ ~ in conjunction with a very effective line search routine to develop a family of preconditioned conjugate or secant- Newton methods. These methods combine the convergence properties of Newton-like methods and the low storagc advantages of vector iteration methods by varying the storage demands for the transformation matrix according to the computer storage facilities.
CONJUGATE-NEWTON METHODS
The problem of finding the minimum of a twice continuously differentiable function F ( x ) expressed in the transformed variables i = WTx by the preconditioned CG method may be defined as follows:
x k + 1 'Xk + E k p k or x k + 1 = x k + a # k (la,b)
where gk=VF(Xk)= W-'qk is the gradient of the total potential energy F or the out-of-balance force vector, W is the transformation matrix which defines the transformed space, R = WWT is a non-singular symmetrization matrix and pk = WTpk defines the transformed direction along which P has to be minimized. In the basic form of CG algorithm W is set equal to the identity matrix.
The coefficients Ek and & play an important role in the performance of the method. Their evaluation strategy characterizes the particular version of the algorithm. Explicit expressions for

PRECON DlTlONED CONJUGATE- AND SECANT-NEWTON METHODS 1301
?ik are generally not available for non-quadratic functions and a line search routine is employed such that
where y k = g k + - gk. Equation (4) guarantees that for quadratic functions the conjugacy condition p T K p , = O holds for any i # j , where K is the linear stiffness matrix and the orthogonal relation g : g k + = O is satisfied. The choice of Fletcher and Reeves16 for f l k is a direct consequence of the above assumptions and of the fact that for exact line search p : g k + =O. Thus equation (4) can be rewritten in the transformed space as follows:
Polak and Ribiere17 suggested a different expression for P given by
B k = y : H - l g k + 1 / Y : R - l q k (6 ) which is not based cn the quadratic properties of the function and makes the algorithm less sensitive to an accumulation of errors due to the approximate calculation of the minimum in equation (3).18 It is generally considered to be the most successful version of f l for the basic CG applications to non-linear finite element structural problems."'"
The CG direction defined by equation (2b) may also be written after cquation (6) as
which represents the direction in a fixed metric defined by the positive definite symmetric matrix R- ' . Irons and ElsawafI2 have taken H to be the current tangent matrix K , and W to be its Choleski factor L, and have thus developed the conjugate-Newton method. Other choices for R as well as detailed application of conjugate-Newton-like procedures will be discussed in subsequent sections.
SECANT-NEWTON METHODS
Quasi-Newton methods are sequential methods for minimizing F(x) of the form
and
where an initial approximation H quasi-Newton or secant equation
x k + l = x k - f f f k p k (8)
P k = - H k g k (9)
to the inverse Hessian is updated at each step to satisfy the
H k + l y k = X k + I - x k = d k (10)
What is considered as the most efficient quasi-Newton update is the BFGS update defined by
Shanno' noticed that if we substitute the unit matrix I for H, in equation ( 1 1 ) we get a symmetrized version of thc Polak-Ribiere algorithm which becomes identical to Polak-Ribiere

1302 M. PAPADRAKAKIS AND C. 1. GANTES
algorithm under exact line searches. Thus, a CG algorithm is generated corresponding to a memoryless quasi-Newton method that does not require handling and storing the full metric Hk. The descent direction is now given by
Following a modification of the Broyden class of quasi-Newton methods proposed by Qren,2" a scalar parameter y is added in the updating formula to make the sequence invariant under multiplication of the objective function by a constant. Shanno suggested scaling the descent direction by the factor
? = 6kTYk/ykTyk ( 1 3)
Thus, the resulting self-scaling direction is given by
The reason for using this parameter y lies in the fact that both equations (7) and (12), used to generate p a + 1, produce an initial length for calculating the minimum which bears no relation to the true step size at the minimum.
Equations (12) and (14) may also be written in the transformed space by adding bars over all quantities. Thus the descent diiections under the fixed metric R - are obtained from
and
with ?= 6; y k / y z R - ' y k .
From equations (15) and (16) it is observed that, if R-' is updated by the variable metric update of equation ( I I), the above methods become identical to the BFGS and the self-scaling BFGS methods respectively. The case in which R = K,, where K , is the tangent stiffness matrix at the beginning of a load increment, corresponds exactly to the method called by Crisfield'3 the secant- Newton method. The term 'secant' comes from the fact that this method satisfies the secant relationship (10) instead of the orthogonality condition of the CG method.
The argument for using the secant-Newton method instead of the conjugate-Newton method, with K = K,, is that an approximate line search is already introduced into the formula of equation (15) so that it is usually possible to dispense with the line search and set ctk to unity provided that K , is a reasonable approximation to the true tangent stiffness matrix.
PRECONDITIONING
It is well known that if an iterative solution procedure is used to solve linear equilibrium equations, the required number of iterations will generally be proportional to some power of the condition number of K . Therefore, the more R resembles K and R - I K tends to unity matrix, the more the rate of convergence increases. In practice, we want to improve the efficiency of the method, which is dependent on the amount of computational work as well as on the storage

1303 PRECONDITlONED CONJUGATE- AND SECANT-NEWTON METHODS
requirements. The value of R = K,, where K , is the tangent matrix at some point of the iterative process, carries over all characteristic advantages and disadvantages of the Newton method.
In this study two types of transformation matrices have been employed. The formation and the storage demands of Ware controlled by a user’s specified parameter. The idea of rejecting terms in an incomplete Choleski factorization of K with respect to their magnitude was first introduced by Jennings and co -~orke r s .~* l In their method, called partial elimination (PEL), the elements of WT are computed by the following procedure:
and then setting
n
- li= Kii , lij= K;/ l i i if KfLj is large I . . = ( ) if KfLj is small
The criterion used to decide whether Ki*j is large or small is specified by a drop-off tolerance parameter $ which determines all elements satisfying
K;2 < $ K i i K j j (19)
to be small. If this criterion is satisfied, the diagonal elements of K are modified according to -
Kii= K:+(I?ii,/Kjj)l’z\ K$J
Rj j= K j j + ( K j j / K i i ) ” 2 IKCl
Thus, depending on the size of the problem and on the available computer storage the method can be transformed from the modified-Newton method with line search to some form of diagonally scaled CG.
One major drawback of this technique is its complicated addressings, which are required because the storage pattern is not known at the start, and neither are its computer storage requirements. The compact storage scheme used with no zero elements stored requires an additional integer array of order equal to the number of non-zero elements stored and an auxiliary integer address array of order (n+ 1 ) for each matrix K and W, plus an integer link array of the same order as the integer array, and two vectors of order n.
The second transformation matrix proposed by Papadrakaki~,’~ called partial preconditioning (PPR), combines the simplicity in the formation of W with very low storage demands. The off- diagonal elements of Ware obtained by discarding those elements which influence the ellipticity of K to a lesser extent. Then
w = (D + WC,)D’’Z (21) with D being the diagonal elements of K , C, a lower triangular matrix containing the remaining off-diagonal elements of K and w a relaxation parameter. The criterion which specifies the elements of K to be retained in C, is also determined by a drop-off tolerance parameter $. Thus all elements satisfying
are considered small with diminishing effect on the condition number of K and are not included in W. In this case the integer link array used for PEL is not required. The case of $ = 1 corresponds to the frequently used diagonal scaling with Rii = Kii and the case of $ = 0 corresponds to a form of the symmetric successive overrelaxation transformation.

1304 M. P A P A D R A K A K I S A N D C J. GANTES
The use of the diagonal waling has proved to be very efficient in non-linear finite element structural problems in conjunction with CG.'9*2' What remains to be seen is whether the preconditioning strategies discussed in this section will improve the efficiency of the non-linear conjugate and secant-Newton methods in a way similar to the linear preconditioned CG, where the results were very satisfactory.",'
LINE SEARCH STRATEGIES
A factor that strongly affects the efficiency of non-linear iterative methods with line search is the degree of accuracy with which the evaluation of the step length is performed. This is because it may involve a number of gradient vector evaluations to achieve the required accuracy, which is an expensive operation in finite element analyses. For this reason the exact line search is replaced by more relaxed stability conditions which guarantee sufficient descent without considerably affecting the convergence properties of the method. These conditions are sometimes referred to in the mathematical programming literature as the Goldstein- Armijo conditions.22 In structural applications more crude or simplified line search or damping techniques are applied with quasi- Newton methods.' 3.23.24
In this work two versions of a line search routine which has been previously applied to structural p r o b l e m ~ ~ ' ~ , ' ~ are employed for the non-linear algorithms discussed above. Both versions employ the regula julsi method which requires only gradient evaluations. This method achieves a much better rate of convergence than the curve fitting techniques, especially in those cases where the directional derivatives cro ero with a steep slope. The first version follows the typical procedure of bracketing the solution along the descent direction and then approximating the minimum by the regula falsi bisection procedure. The vital part of this line search technique is the use of a heuristic approach for the determination of the initial step length at each iteration. The first step size at iteration k is given by q, = ck in which ck is a parameter dependent on the history of all k - 1 line searches previously performed. Starting with co= I , ck=(2) ' - 'ck- ,, where r is the number of increments required to bracket the root at iteration k- 1; if the final value of ak results in ak +0.5(cr2 - xl), r is decreased by one. The values of tll, u2 are the subsequent values of 01
found to bracket the solution. In order to safeguard against those cases where the directional derivatives cross zero with a steep slope and produce difficulties for convergence in the regula,falsi bisection technique, ck is adjusted to c,=(+,"c,- ', where s is the number of decrements required to insure Iplg(.x,+a,p,)l >q1Ip:y(xk+ci2pk)I. The value of q1 is taken between 0.01 and 0.1.
The second version starts with an initial step length equal to ck. Then if the stability condition / p l g ( x k + a j p k ) ( > qzlplgkl is satisfied, a k = x j . Otherwise, depending on the sign of the directional derivative, we either apply a reyula falsi bisection step if the root is already bracketed or we set x j + = 2aj and repeat the stability check. The value of q2 is taken in the range (0-1).
COMPUTATIONAL RESULTS
In order to attempt an assessment of all the various strategies previously discussed, some demonstrative solutions are presented that give some insight into the behaviour of the algorithms to structural analysis problems. The test problems are two skeletal structures defined in Figures 1 and 2. Figure 1 shows the characteristics of a 168-member reticulated dome (n= 147 d.0.f.). Large differences in member properties are deliberately chosen in order to increase the ellipticity of the stiffness matrix. Figure 2 also shows the characteristics of a 48-member frame (n= 222 d.0.f.). The values of the point loads are 15 and 5 respectively for the two examples, which induce considerable non-linearities into the response of the structures. The non-linear beam-column approach2s was

PRECONDITIONED CONJUGATE- AND SECANT-NEWTON METHODS 1305
P
22 .08 \
\ /
point load I -- - - _ _ _ _ I - 1
II = 10
A I I I = 500
A j y = 100
= 10000
/ w Point loads
Figure 1. Example 1. 168-member reticulated shell
used in modelling the problems while k , is obtained according to Reference 26. The computational work has been carried out on the CDC Cyb’er 171 computer.
In the figures and tables a number of algorithms with the following abbreviated names have been tested and compared.
(i) PPR($)-I : PPR with the rejection parameter $(o= 1) and p k + taken from equation (7). (ii) PPR($)-I1 : As in (i) with p k f l taken from equation (15).
(iii) PPR($)-111: As in (i) with p k + , taken from equation (16).
If a line search with bracketing (first version) or with stability condition (second version) is used, then the respective symbols LS@) and ST(?,) are added after the abbreviated name of the algorithm. The parameter p denotes the convergence tolerance of two subsequent step length evaluations such that I x j + - cl,l <p, while the parameter q2 controls the tolerance of the stability condition. When neither Roman numbers nor the symbols ‘LS’ and ‘ST’ are added. then the conjugate-Newton method (Polak-Ribiere direction p k + with the classical line search routine with bracketing (LS(1.0)) are to be understood. Finally, for PEL applications ‘PPR’ is replaced by ‘PEL’.
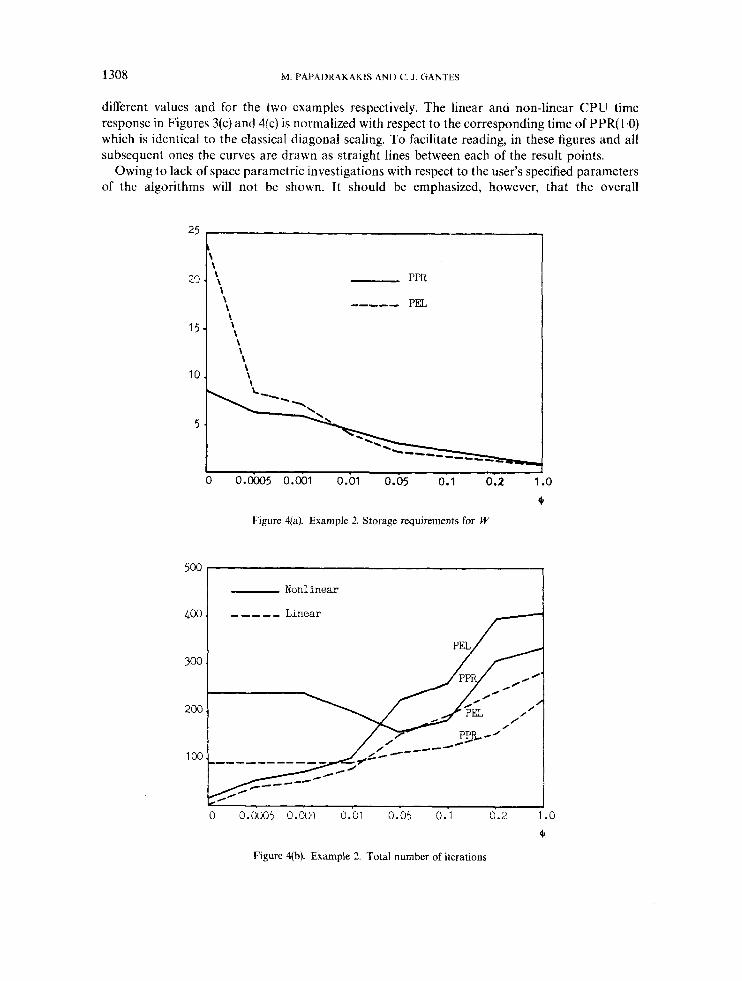
Figures 3 and 4 depict thc performance of the two preconditioning strategies for different values of the rejection parameter $. The conjugate-Newton method is applied and a very relaxed line search parameter p = 1 is used requiring almost only one regula falsi step in each iteration. Iterations are terminated when )/gk II/I1yo I) < E , with E = J O - 5 . In these two figures results are also

1306 M PAPADRAKAKIS AND C J G4NTbS
P(MN)
o P o i n t loads
z1 ( m l
1.'5 1 .'O 0.5 0.5 1.0 1.5 2.0 2.5 3.0
Figure 2 Example 2 48-member frame dome
\ \
40. i \ \
30. \ \ \ \ \ \ \
10, \
20.
0
+ Figure 3(a). Example 1. Storage requirements for W

v) c ..i +J
B +J U
0 .r(
+J K
1307
1.25
1 .00
0.75
0.50
0.25
0 0.0005 0.001 0.01 0.05 0.1 0.2 1 .o e
Figure 3(b). Example 1. Total number of iterations
I .____._---
J
0 O.OOO5 0.001 0.01 0.05 0.1 0.2 1.0
Figure 3(c). Example I . Total CPU time
shown f o r the solution of the linearized equations too in an effort to make direct comparison of the e8ect of the preconditioning matrices on linear and non-linear versions of the conjugate gradient method. The linear solution is obtained by the preconditioned CG algorithm described in References 4 and 14 with ak = r:R ~ 'rk/$Kpk. Here K is the linear stiffness matrix stored in a compact form similar to that used for Wand i-k is the residual vector. In Figures 3 and 4 the storage requirements for W, the number of iterations and the total CPU time in seconds are shown for
1308 M. PAPADRAKAKIS AND C . J. GANTES
25
22 .
15-
10.
different values and for the two cxamples respectively. The linear and non-linear CPU time response in Figures 3(c) and 4(c) is normalized with respect to the corresponding time of PPR(1.0) which is identical to the classical diagonal scaling. To facilitate reading, in these figures and all subsequent ones the curves are drawn as straight lines between each of the result points.
Owing to lack of space parametric investigations with respect to the user's specified parameters
L \ \ \ \ PPR
----- PEL \ \ \ \
', \ \ \ \ \ 1
that the overall
I
0 0.0005 0.001 0.01 0.05 0.1 0.2 1.0
e Figure qa). Example 2. Storage requirements for W
w Figure qb). Example 2. Total number of iterations

PRECONDITIONkD CONJUGATE- AND SECANT-NEWTON METHODS I309
,-,Nod inear
-----Linear
0 0.0005 0.001 0.01 0.05 0.1 0.2 1.0 l4
Figure 4(c). Example 2. Total CPI! time
performance of the methods can be severely affected by the choice of these parameters. One characteristic $ value is chosen for each PPR and PEL to be compared with the diagonally scaled and the fully preconditioned (I) =0) versions of the algorithms. For PPR the values of $ =0.1 and $ = 005 were chosen for the two examples respectively. These require for W less than half the storage demands of the stiffness matrix. For PEL, the value of $ which gives for W the same number of non-zero terms as the stiffness matrix was chosen as the most convenient t+b value in terms of storage requirements. It has to be emphasized, however, that the results of the two preconditioning techniques are not comparable since the storage demands for constructing and storing W are sometimes of a different order of magnitude. In Reference 27 a computational procedure has been proposed for the PPR technique in which no additional space must be provided for the creation of W.
Figures 5-8 show the convergence behaviour of conjugate-Newton PPR and PEL for the two examples and for the characteristic $ values. Plots of the normalized residual norm are shown versus the number of iterations and the CPU time respectively. Tables I and I I depict the performance of partial preconditioned conjugate and secant-Newton methods as they are specified by the characteristic descent directions of equations (7), (15) and (16).
Finally, Table 111 shows the convergence behaviour of the algorithms for different line search strategies. The results show that, when the classical line search routine with bracketing is used, the secant-Newton method seems not to take advantage of its property of not requiring accurate line searches and produces similar behaviour (for II/ = 0) to the corresponding conjugate-Newton method. This equivalence is altered in favour of the conjugate-Newton method as $ approaches 1.0. It may also be observed that, by using a more relaxed stability criterion, secant-Newton methods can easily reach the required convergence accuracy with less computer effort in each iteration. However, as $ is moving away from 0.0, there is a tendency for the convergence properties to deteriorate and, as a result, the computer cost is increased. Results obtained but not depicted in Table 111 revealed that, when the stability criterion is used without the rqulu fu ls i bisection step, the methods become very sensitive to the choice of the parameter q2. The additional

1310 M. PAPADRAKAKIS AND C. J. GANTES
/ /.
/'
,/- / i
0 4 0
0 0 4 I1 II I1
. . .

PREC ONDlTlONLD C O N J U G A E - AhU SLCANT-NEWTON METHODS
/
1311

1312 M. PAPADRAKAKIS AND C. J GANTES
ln
0

PRECONDITIONED CONJUG4TE- AND SFCANT-NFWTON METHODS
/
1313

1314 M. PAPADRAKAKIS AND C . I. GANTES
Table I. Efficiency studies on example 1
CPU c PU time time
Method N,,,, (s) Method Niter (s)
PPR( l.O)-I--LS( 1.0) PPR(O1)-ILLS( 1.0) P P R( 0.0tI-L S( 1 .0)
PPR( l.O)-II-LS( 1.0) PPR(O~l)-IiLLS( 1.0) PPR(OO)LIILLS(l .O)
PPR( l.O)-IIT-LS( 1.0) PPR(O-l)-III-LS( 1.0) P PR(O.O)-III-LS( 1.0)
579 936 315 524 255 433
541 943 315 580 237 425
566 989 318 557 251 444
PEL( l.Q)-I-LS( 1.0) PEL( OOOOS)-J -LS( 1.0) PEL(0.0) I LS(1.0)
PEL(I-O)-II-LS(14I) P E L(OO005)-J ILLS( 1.0) PEL(O.O)-II LS( 1.0)
PEL( 1.0) HI LS( 1.0) PEL(0.0005)-IIILLS( 1.0) PEL(O.O)-III-LS( 1 0)
659 I155 78 120 18 72
630 1201 77 121 17 70
632 1280 77 127 17 75
Table 11. Efficiency studies on example 2
Method
CPU time
Ni,er (s) Method
PPR( 1.0tI -LS( I .O) PPR(0.05) I LS(I.0) PPR(0.0) -ILLS( 1.0)
PPR(I-O)-II-LS( 1.0) PPR(O.OSbII-LS( 1 ’0) PPR(O-O)-II LS(1.0)
PPR( 1 0)-111-LS( 1 0) PPR(O.OStII1- LS(l.0) PPR(0.0) 111 LS(1.0)
335 158 237
346 173 237
347 159 238
1449 788
1031
1448 863
1051
1645 736
1042
PEL( l.O)-I-LS( 1.0) PEL(O.0005~l-LS( 1.0) PEL(OO)-I-LS( 1.0)
PEL(1-0) 11 LS(1.0) PEL(0.0005)-11- LS( 1 .0) PEL(O.O)-II-LS( 1.0)
PEL( I.O~ITILLS(l .O) PEL(0.0005) 111 LS( 1 .0) PEL(0.O) III-LS( 1.0)
406 1858 51 262 14 94
400 1799 51 259 16 110
408 1890 60 284 I6 112
Table 111. Example 2. Efficiency and line search techniques
Method
CPU time
Niter (s) Method
PPR(OO5) -I-ST(0.9) PPR(O05)-1-ST(O’ I ) PPR(0.05t ILLS( 1.0)
PPR(0.05) -KI- ST(0.9) PPK(O~O5)-II-ST(O~l) r’PK(O.OS)-II-LS(l.O)
PPR(0,O) I ST(0.9)
PPR(0.0) ILLS( 1.0)
P PR(0.0)-I IST(O.9) PPR(0+IT-ST(O. 1) PPR(0.0 j TI- LS( 1.0)
PPR(O.O)-I-ST(O. 1)
196 768 224 692 158 788
384 787 227 728 173 863
1260 5244 275 900 237 1031
376 815 246 867 237 1051
PEL(OQO05)-1-ST(0.9) PEL(0.0005) -I ST(O.1) PEL(O.0005) I LS( 1 .0)
PEL(O.0005)- 11- ST(0.9) PEL(OWO5)-1I-ST(O. 1) PEL(O.0005)-II-LS( 1 .O)
PEL(0.0) I ST(0.9) PEL(O.O)-I-ST(O. 1) PEL(O.O)-I-LS( 1 .0) PEL(D.0)- 11 ST(0.9) PEL(0.0)- 11-ST(0.1) PEL(O.O)-ITLLS( 1 .O)
128 291 57 237 51 262
128 289 61 241 51 259
47 142 19 112 14 94
25 93 16 101 16 110

PRECONDITIONED COYJLGATF 4 h D SECAN T-Nk‘A TON METHO1)S 1315
regzila falsi bisection step acts as a relaxation parameter, especially when ylz i s small, and this results in a better convergence in terms of number of iterations as well as in an overall improvement of the computer cost.
‘In this work the application of prcconditioned techniques coupled with non-linear versions of the conjugate gradient and quasi-Newton methods has been presented for the solution of large non- linear finite element problems. Con-jugate- or secant-Newton methods are constructed from proper descent direction formulae :hat define the required accuracy for the line search.
The conclusions which can be drawn from the tests performed may be summarized as follows.
(9
(ii)
(iii)
(ivj
Since the efficiency of a method depends not only on the convergence properties and the CPU time required, but on the computer storage demands as well, a direct comparison between PPR and PEL is not possible. PPR is more flexible in adjusting the size of W to the available computcr storage and, thereby, enhancing the convergence properties of the method without losing the vectorial nature of the basic CG. PEL, on the other hand, requires much more storage for the formation of U’, even when the same non-zero terms as in PPR are finally retained in W. The number of iteralions and the CPU time required for convergence with respect to Ehe parameter $ seem to be more affected in the non-linear applications of the preconditioned CG than in the corresponding linear cases. The improvement is more acute in PEL, as $ gets smaller. The peculiarity of PPR in achieving better results for the values of $ in the region of 0-1 is also preserved here, as was testified previously in linear applications. The line search routine plays a tremendous role in the efficiency of the methods. The proposed stability criterion, with a heuristic approach for evaluating the initial step length in each iteration, is a safe and very efficient line search routine of preconditioned conjugate and yecant-Newton methods. The stability routine with the regula fialsi bisection step used seem.; also to alleviate the unfavourable consequences from not using more exact line Teiirches when the conjugate-Newton method is applied. The self-scaling parameter ,J used in vcrsion 1x1 failed to accelerate convergence in all cases. FinaUy, it may be seen how powerful methods can be created from this beneficient combination of preconditioning matrices with conjugate gradient and quasi-Newton strategies These methods, in conjunction with the idea of partial preconditioning, can successfully tackle problems with varying degrees of non-linearity or cllipticity and also any number of unknowns. However, i t remains to be seen whether the concept of partial preconditioning can also be applied for tracing post-limit point equilibrium paths.
REFERENCES
i. R . S , Dembo and T. Steihaug, ‘Truncated-Newton algorithms for large scale unconstrained optimjzation: iMufh.
2. A. Griewank and Ph. L. Toint, ‘Partitioned variable metric updates for large structured optimization proklcnis’.
3. S . 0. Wash. ‘Prcconditioning of truncated-Newton methods’, SI.4,III 1. Sri. Stut. Cnmp., 6, 599-616 (19x5). 4. M. Papadrakakis and F. J. Gantes, ‘Truncated Newton methods for non-linear finite elcment analysis’, Comp. Sfruct.,
5. bl. Papadrakakis, ‘A family ofmethods with three-term recursion formulae’, I n i . j . nurner. methods eng., 18. 1785- 1799
6. P. Concus. C. H. Golub and D. P. O’Leary, ‘Numerical solution of nonlinear elliptic partial differential equations by a
Pruqramming, 26, 19&-212 il983).
Numrr. Muthernutik, 39, 119-1 37 (1982).
to appear.
( 1 98zJ.
generalized corijugate gradient method, Computing, 19, 321-339 (1978).

1316 M. PAPAnRAKAKIS AND C. J. GANTES
7. 0. Axelsson, ‘Solution of linear systems of equations in iterative methods’, in V. A. Barker (cd.), Sparse Techniques
8. A. Jennings and G. M. Malik, ’Partial elimination’, J . Insl. Math. Applic., 20, 307-316 (1977). 9. D. F. Shanno. ‘Conjugate gradient methods with inexact searches’, Math. Oper. Res., 3. 244256 (1978).
(1,rcture Noles in Mathcniatics No. .572), Springer-Verlag, Berlin, 1977.
10. L. Nazarcth, ‘A conjugatc direction algorithm without line scarches’. .I. Opt. Theory Applic., 23, 373-378 (1977). 11. A. Perry, ‘A self correcting conjugate gradient algorithm’. Int. J . Comp. Math., 6, 3277333 (1978). 12. R. Irons and A. Elsawaf, ‘The conjugate-Newton algorithm for solving finite element equations’, in K. J. Bathe c’t al.
(eds.), Proc. US-German Symp. on Formulation and Algorithms in Finite Element Analysis. MIT, 1977. pp. 656 672. 13. M. A. Crisfield, ‘Incremental/iterative solution procedures for nonlinear structural problems’, in C. Taylor et al. (eds.).
Numericul Methods.for Non-linear Problems, Pineridge Press, Swansea, 1980, pp. 261-290. 14. M. Papadrakakis, ‘Accelerating vector iteration methods’, .I , App l . Mech., 53. 291-297 (1986). 15. M. A. Ajiz and A. Jennings, ‘A robust incomplete Choleski-conjugate gradient algorithm’, I n i . j . numer. nwthods eng.,
16. R. Fletcher and C. M. Reeves, ‘Function minimimtion by conjugate gradients’, Comp. J.* 6, 149-154 (1964). 17. E. Polak and G. Ribiere, ‘Note sur la convcrgence de methodes de direction conjugces’, ibid., 3, 3 5 4 3 (1969). 18. M. J. D. Powell, ’Restart procedures for the conjugate gradient melhod’. Math. Pmgrumrniny, 12, 241-254 (1977). 19. M. Papadrakakis and P. Ghionis, ‘Conjugatc gradicnt algorithms in nonlinear structural analysis problems’, Comp.
20. S . S . Oren. ‘Self-scaling variable metric algorithm. Part II’, Management Sci., 20, 863-874 (1974). 21. L. Fox and E. L. Stanton, ‘Developments in structural analysis by direct energy minimization’, A I A A J . , 6, 1036-1 042
22. J. E. Dennis and J. More, ‘Quasi-Newton methods, motivation and theory’, S I A M Reo., 19, 46-89 (1977). 23. K. J. Bathe and A. P. Cimento, ‘Some practical procedures for the solution of nonlinear finite element equations’,
24. Ii. Matthies and G. Strang, ‘The solution of nonlinear finite element equations’, I n [ . ,j. numer. methods eng., 14,
25. M. Papadrakakis, ’Post-buckling analysis of spatial structures by vector, iteration methods’, C‘omp. Strurt., 14,
26. J. L. Meek and H. S. Tan, ‘Geometrically nonlinear analysis of space frames by an incremental iterative technique’,
27. M. Papadrakakis and M. C. Drakopoulos, ‘Computational strategies for finite element preconditioning’, Submitted
20, 949-966 (1984).
Methods A p p l . Mech. Eng., 59, 11-27 (1986).
(1 968).
Comp. Methods Appl. Mech. Eng., 22. 59-85 (1980).
161 3-1626 (19 79).
393-402 (1981).
Comp. Methods A p p l . Mech. Eng., 41, 261-282 (1984).
for publication.



![Constraint-Preconditioned Inexact Newton Method for ... · PDF filespace Newton method for hydraulic analysis of water distribution networks. ... gradient (CG) method to ... [14]](https://img.dokumen.tips/doc/110x75/5aa8d4947f8b9a72188c189f/constraint-preconditioned-inexact-newton-method-for-newton-method-for-hydraulic.jpg)

























