Embed Size (px)
Citation preview

European Journal of Control 19 (2013) 206–213
Contents lists available at SciVerse ScienceDirect
European Journal of Control
0947-35http://d
n CorrE-m
ramos@lfcalber
journal homepage: www.elsevier.com/locate/ejcon
Practical stability of switched systems without a common equilibriaand governed by a time-dependent switching signal
Roman Kuiava a,n, Rodrigo A. Ramos b, Hemanshu R. Pota c, Luis F.C. Alberto b
a Federal University of Parana (UFPR), Polytechnic Center, Department of Electrical Engineering, Rua Cel. Francisco Heraclito dos Santos, 100, Jardim das Americas,81531-980 Curitiba, PR, Brazilb University of Sao Paulo (USP), Engineering School of Sao Carlos (EESC), Department of Electrical Engineering, Av. Trabalhador Saocarlense, 400,Centro, 13566-590 Sao Carlos, SP, Brazilc University of New South Wales at Australian Defence Force Academy (UNSW@ADFA), School of Engineering and Information Technology,Northcott Drive, Canberra, ACT 2600, Australia
a r t i c l e i n f o
Article history:Received 10 April 2012Accepted 21 November 2012
Recommended by J.C. Jeromel/A.J. van der Schaftcontinuous-time switched nonlinear systems without a common equilibria for all subsystems. In thisclass of switched systems, the equilibrium point varies discontinuously according to a time-dependent
Available online 10 May 2013
Keywords:Switched systemsContinuous-time systemsPractical stabilityLinear matrix inequalities
80/$ - see front matter & 2013 European Conx.doi.org/10.1016/j.ejcon.2012.11.001
esponding author.ail addresses: [email protected] (R. Kuiavsc.usp.br (R.A. Ramos), [email protected] ([email protected] (L.F.C. Alberto).
a b s t r a c t
In this paper, the problem of practical stability of some classes of continuous-time switched systems isstudied. The main results of this paper include some sufficient conditions concerning practical stability of
switching signal. So, stability with respect to a set, rather than a particular point, is discussed. Using thispreliminary result, we present sufficient conditions in the form of linear matrix inequalities (LMIs) forpractical stability of a particular class of switched systems without common equilibria: the switchedaffine systems. An illustrative example in the power system stability area is presented to show thevalidity of the results.
& 2013 European Control Association. Published by Elsevier Ltd. All rights reserved.
1. Introduction
Continuous-time switched systems are typically represented byequations in the general form
_xðtÞ ¼ f sð�ÞðxðtÞÞ; xðt0Þ ¼ x0; ð1Þ
where xðtÞ∈Rn is the state, t0 is the initial time and s is a piecewiseconstant function called switching signal. In this paper, we considerthe switching signal is time-dependent, so s is a function oftime defined as sðtÞ : I-S, where I¼ ½t0; tf Þ and tf is a finite constant.Also, S¼ f1;…;Ng is a finite set of positive integers. Hence, givena set of subsystems ff 1;…; f Ng, the switching signal is such thatf sðtÞ∈ff 1;…; f Ng, for each t∈I. This obviously imposes a discontinuityon f sðtÞ since this vector jumps instantaneously from fi to fj for somei≠j, i; j∈S, once switching occurs. The instants of time at which f sðtÞ isdiscontinuous, i.e., t1; t2;…; tk;…∈I (t0ot1ot2o⋯otko⋯), arecalled switching times.
The analysis of the dynamic behavior of continuous-timeswitched systems has been addressed by several authors, whosestudies are typically focused on stability [14,12,19,17], controll-ability, observability [2,15] and the design of controllers with
trol Association. Published by Elsev
a),.R. Pota),
guaranteed stability and performance [8,6,13]. In general, the mainresults in these areas assume that all subsystems of (1) share acommon equilibrium (typically the origin x¼0, i.e., f ið0Þ ¼ 0 for alli¼1,…,N), and hence the stability of (1) is actually the stability ofthis common equilibrium [6,5,10,23].
For this class of switched systems, some results of asymptoticstability of the origin can be established from direct methods,making use of an auxiliary scalar-valued Lyapunov function. Byusing direct methods, the global asymptotic stability of the originis guaranteed if there exists a common, continuously differenti-able, positive-definite real-valued Lyapunov function vðxðtÞÞ for allsubsystems ff 1;…; f Ng, such that
∂v∂x
f io−λiv; λi40; ∀i¼ 1;…;N; x≠0: ð2Þ
The existence of a common Lyapunov function for all subsystemsff 1;…; f Ng ensures that the equilibrium point x¼0 is globally asymp-totically stable for any arbitrary switching signal [6]. Unfortunately, it iswell known that, depending on the system behavior and its dimen-sions, the search for a feasible solution for inequality (2) can be a verydifficult task or a solution may not even exist, once that someswitched systems may be stable only under restricted switchingsignals. To study the stability of switched systems under restrictedswitching rules, the necessity of a common Lyapunov function for allsubsystems can be replaced by the existence of a family of continu-ously differentiable, radially unbounded, positive-definite real-valued
ier Ltd. All rights reserved.

R. Kuiava et al. / European Journal of Control 19 (2013) 206–213 207
Lyapunov functions fV1ðxðtÞÞ;…;VNðxðtÞÞg such that
∂Vi
∂xf io−λiV i; λi40; ∀i¼ 1;…;N; x≠0: ð3Þ
and,
Vikþ1ðxðtkÞÞ≤Vik ðxðtkÞÞ; ð4Þ
for every switching time tk∈I at which s switches from ik to ikþ1,where ik; ikþ1∈S, ik≠ikþ1 [14,19]. In spite of condition (2), this approachallows to the Lyapunov function vðxðtÞÞ ¼ VsðtÞðxðtÞÞ to have certaindiscontinuities (at the switching times), which turns out to beattractive for stability analysis of switched systems. The asymptoticstability of the origin is then verified when the subsystems ff 1;…; f Ngare individually stable (condition (3)) and vðxðtÞÞ is uniformly decreas-ing for all t∈I (condition (4)).
A less conservative result (in comparison with both conditions (2)and the pair (3) and (4)) is given in Geromel and Colaneri [12],Colaneri et al. [6], where the above nonincreasing condition on theLyapunov functions is relaxed. Basically, it is replaced by a weakercondition which imposes that the sequence vðxðtkÞÞ, t0; t1;…; tk;…∈Imust converge uniformly to zero, where vðxðtkÞÞ ¼ Vik ðxðtkÞÞ when sswitches to mode ik at the switching time tk. In other words, it isrequired that
Vikþ1ðxðtkþ1ÞÞ≤Vik ðxðtkÞÞ; ik; ikþ1∈S; ik≠ikþ1; ð5Þ
for all successive switching times k and kþ 1, where sðtÞ ¼ ik∈S,∀t∈½tk; tkþ1Þ.
On the other hand, when there is not a common equilibria forall subsystems of (1), the stability analysis becomes more compli-cated. An interesting approach concerning stability and stabiliza-tion of switched systems without a common equilibria wasinvestigated in Zhai and Mitchel [28], Zhai and Michel [27], Xuand Zhai [24], Xu et al. [25] in terms of practical stability. Generallyspeaking, this concept deals with two sets Ω1⊂Rn and Ω2⊂Rn
satisfying Ω1⊂Ω2, which are specified for the initial state and theentire system state, respectively. These two sets do not have toinclude the origin and they can be specified in terms of physicallimitations of the system variables. The practical stability requiresthat if the initial state is in Ω1, then the system state should stay inΩ2 for all t∈I [27].
Hence, unlike the classical stability definitionwhich is based on theexistence of Ω1 for any Ω2, here both of the sets Ω1 and Ω2 are fixedand so they do not vary. Stability with respect to a set, rather than aparticular point, is then the basis of the practical stability concept.
Hence, motivated by the studies of practical stability addressedin Zhai and Michel [27], Xu and Zhai [24], this paper aims atproviding new results on practical stability of the switched system(1) without a common equilibria and under a time-dependentswitching signal. From this general result, we focus on thedevelopment of sufficient conditions for practical stability for theimportant class of switched systems without common equilibriareferred in the literature as switched affine systems [3,25,7,26,22].The obtained results for this class of systems are formulated aslinear matrix inequalities (LMIs) constraints [4].
This paper is organized as follows. Section 2 provides the defini-tions of practical stability and the problem formulation. In Section 3,we present the main result on practical stability for the switchedsystem (1) without a common equilibria and considering a time-dependent switching control. Using the result of Section 3, the Section4 presents sufficient conditions in the form of matrix inequalitiesconstraints for practical stability of switched affine systems. Section 5presents a illustrative example in the power system stability area andits corresponding results, which demonstrate the effectiveness of theapproach proposed in this paper, and Section 6 contains the conclu-sions and some final remarks on the proposed approach.
2. Preliminaries and problem formulation
In this section we first establish the notation used throughoutthe paper. Rn denotes the n-dimensional Euclidean space, Rn�m isthe set of n�m real matrices. For two elements a and b in Rn, fa; bgdenotes the set constituted by only these two elements, while ½a; b�denotes the set containing all the points in the line segmentbetween a and b. In addition, ½a; bÞ denotes the set containing allthe points of ½a; b�, except the point b. For matrices and vectors ()'means transposition. For a symmetric matrix P, P≻0 (P≺0) denotespositive (negative) definiteness. Positive (negative) semi-definiteness is denoted by P≽0 (P≼0). For a set Ω∈Rn, we use Ωand Ωc to denote the closure and the complement of Ω, respec-tively. N½a; bÞ and N ½a; bÞ denote, respectively, the number ofswitching times on the time interval ½a; bÞ and the maximumnumber of switching times that can occur on ½a; bÞ. For a decimalnumber r, intðrÞ means the integer part of r.
Now, consider again the switched system (1). We do notassume the existence of a common equilibria for all subsystemsff 1;…; f Ng.
The switching signal is defined as
sðtÞ ¼ ik∈S¼ f1;…;Ng; ∀t∈½tk; tkþ1Þ; ð6Þwhere tk and tkþ1 are two consecutive switching times thatsatisfies
tkþ1−tk≥T ; ð7Þfor all the switching times t1; t2;…; tk; tkþ1;…∈I and the indexik∈S is arbitrarily selected at each of these switching times. Also, Tis a positive number denoted in the literature as being a dwell-time of the switching signal sðtÞ [19].
Definition 1. A positive number T is called a dwell-time of theswitching signal sðtÞ if the time interval between any twoconsecutive switchings k and kþ 1 is no smaller than T.
Since we are not assuming a common equilibria for allsubsystems and the switching signal sðtÞ is only time-dependent,it is not possible to guarantee an asymptotic convergence of thesystem trajectories to a specific equilibrium point. Hence, stabilitywith respect to a set, rather than a particular point, is studied inthis paper in terms of practical stability [27].
Definition 2. The switched system (1) is considered practicallystable with respect to the sets Ω1⊂Rn and Ω2⊂Rn (Ω1⊂Ω2) in thetime interval I¼ ½t0; tf Þ, if xðt0Þ∈Ω1 implies xðtÞ∈Ω2, for all t∈I.
The first problem under consideration in this paper can bestated as follows.
Problem 1. Given the sets Ω1 and Ω2 (Ω1⊂Ω2) and a time intervalI¼ ½t0; tf Þ, determine a scalar TD40 such that the switched systemwithout a common equilibria (1) is practically stable with respectto Ω1 and Ω2 in the time interval I, for every switching signal sðtÞsatisfying (6) and (7) with a dwell-time T ¼ TD.
From the solution of the Problem 1, we derive some results onpractical stability for a particular class of switched systems with-out a common equilibria, i.e., the switched affine systemsdescribed as
_xðtÞ ¼ f sðtÞðxðtÞÞ ¼ AsðtÞxðtÞ þ bsðtÞ; xðt0Þ ¼ x0; ð8Þwhere the switching signal sðtÞ is given by (6) and (7). Assumingthat all matrices Ai are nonsingular, each subsystem has a singleequilibrium point at xei ¼ −A−1
i bi, i¼1,…,N.Switched affine systems can arise naturally in many applications,
for example, in the presence of saturations or relays. Applications inthe area of power electronics on the DC-DC converters control design,for example, are presented in Deaecto et al. [9]. In addition, they can be

R. Kuiava et al. / European Journal of Control 19 (2013) 206–213208
used for approximation of nonlinear switched systems with multipleequilibrium points, originally described in the form of (1). An exampleof that are the electric power systems. These systems are subject tounexpected changes on their structures and operation (caused by, forexample, the load demand and system topology) and, consequently,on their equilibrium points. Hence, the set Ω2 may be viewed as therepresentation of a region within which the safe operation of thepower system is guaranteed, while the set Ω1 includes the initialconditions created by a number of perturbations to which the systemmay be subject during its operation (these perturbations are usuallyknown in advance as the results of the process of contingencyscreening). Besides, the dwell-time T is a practical information thatgives an idea on how often structural and operational changes occur inthe system as time goes by.
From this practical meaning of the sets Ω1 and Ω2, the problemof interest is to determine the conditions (in terms of dwell-timeT) under which the systems trajectories (beginning at xðt0Þ∈Ω1)will be confined into the security region of operation Ω2 for thewhole time interval of interest I. Hence, the second problem underconsideration is formalized as follows.
Problem 2. Given the sets Ω1 and Ω2 (Ω1⊂Ω2) and a time intervalI¼ ½t0; tf Þ, determine a scalar TD40 such that the switched affinesystem (8) is practically stable with respect to Ω1 and Ω2 withinthe time interval I, for every switching signal sðtÞ satisfying (6) and(7) with a dwell-time T ¼ TD.
Remark 1. From the Problems 1 and 2, notice that the sets Ω1 andΩ2 are assumed to be known. Section 4 presents a step-by-stepprocedure proposed in this paper to solve Problem 2, in which oneof its steps deals with the problem of computing these two sets (inthe form of ellipsoids) from a practical knowledge of the studysystem.
3. A general result on practical stability of switched systemswithout a common equilibria—the proposed solution ofProblem 1
Next theorem provides a solution of the Problem 1 presented inthe last section.
Theorem 1. Let the sets Ω1⊂Rn and Ω2⊂Rn (Ω1⊂Ω2) and a timeinterval I¼ ½t0; tf Þ be given. If there exist a scalar TD40, a family ofradially unbounded, real-valued functions fV1;…;VNg satisfying localLipschitz conditions in Ω2 and a positive number μ41 such that
ðiÞ _V iðxðtÞÞ≤0; ∀i∈S; ∀t∈I; ∀x∈Ω2;
ðiiÞ Vikþ1ðxðtkþ1ÞÞ≤μVik ðxðtkþ1−TDÞÞ; ∀ik; ikþ1∈S; ∀t∈I; ik≠ikþ1; ∀x∈Ω2;
ðiiiÞ μN ðt0 ;tf Þmaxi∈S
supx∈Ω1
Viðxðt0ÞÞomini∈S
infx∈Ωc
2
ViðxðtÞÞ; ∀t∈I;
then, the switched system (1) is practically stable with respect to Ω1
and Ω2 in the time interval I for every switching signal sðtÞ satisfying(6) and (7) with a dwell-time T ¼ TD.
Proof. The proof is by contradiction. Let x(t) be a solution of (1)with xðt0Þ∈Ω1. Let us assume that there exists a t∈I such thatxðt Þ∉Ω2 for the first time. Let t1; t2;…; tm denote the switchingtimes before t . From (6) and (7), we have that sðtÞ ¼ ik∈S¼f1;…;Ng, ∀t∈½tk; tkþ1Þ, k¼ 0;1;…;m−1, where tkþ1 ¼ tk þ Tk withTk≥T ¼ TD40.Let us consider the real-valued Lyapunov function
vðxðtÞÞ ¼ VsðtÞðxðtÞÞ, which is sharing the same switching signalsðtÞ of the switched system (1). This means that there exists aset of real-valued functions fV1ðxðtÞÞ;…;VNðxðtÞÞg, each oneassociated to its correspondent subsystem of the setff 1ðxðtÞÞ;…; f NðxðtÞÞg. Since ViðxðtÞÞ, i¼1,…,N, satisfies local
Lipschitz conditions, we have
�sðtÞ ¼ im∈S; ∀t∈½tm; t �;
vðxðt ÞÞ ¼ Vim ðxðt ÞÞ ¼ Vim ðxðtmÞÞ þZ t
tm
_V im ðxðτÞÞ dτ
�sðtÞ ¼ im−1∈S; ∀t∈½tm−1; tmÞ;
vðxðt−mÞÞ ¼ Vim−1 ðxðt−mÞÞ ¼ Vim−1 ðxðtm−1ÞÞ þZ tm
tm−1
_V im−1 ðxðτÞÞ dτ
�sðtÞ ¼ im−2∈S; ∀t∈½tm−2; tm−1Þ;vðxðt−m−1ÞÞ ¼ Vim−2 ðxðt−m−1ÞÞ ¼ Vim−2 ðxðtm−2ÞÞ
þZ tm−1
tm−2
_V im−2 ðxðτÞÞ dτ
⋮�sðtÞ ¼ i0∈S; ∀t∈½t0; t1Þ;
vðxðt−1 ÞÞ ¼ Vi0 ðxðt−1 ÞÞ ¼ Vi0 ðxðt0ÞÞ þZ t1
t0
_V i0 ðxðτÞÞ dτ
Using the inequality (i) of Theorem 1 in the above sequence, wehave
vðxðt ÞÞ ¼ Vim ðxðt ÞÞ≤Vim ðxðtmÞÞ ð9Þ
Vim−1 ðxðt−mÞÞ≤Vim−1 ðxðtm−1ÞÞ ð10Þ
Vim−2 ðxðt−m−1ÞÞ≤Vim−2 ðxðtm−2ÞÞ ð11Þ
⋮Vi0 ðxðt−1 ÞÞ≤Vi0 ðxðt0ÞÞ ¼ vðxðt0ÞÞ ð12Þ
Now, we show that for any two consecutive switching times tkand tkþ1 it is true that vðxðtkþ1ÞÞ≤μvðxðtkÞÞ. For that, using theinequality (ii) of Theorem 1, we have
vðxðtkþ1ÞÞ ¼ Vikþ1ðxðtkþ1ÞÞ
≤μVik ðxðtk þ Tk−TDÞÞ
≤μ Vik ðxðtkÞÞ þZ tkþTk−TD
tk
_V ik ðxðτÞÞ dτ� �
≤μVik ðxðtkÞÞ ¼ μvðxðtkÞÞ; ð13Þ
where the second inequality holds once that for every Tk−TD≥0 itis true that _V ik ðxðtÞÞ≤0.Now, using inequalities (13) and (9)–(12) it follows that
vðxðt ÞÞ≤Vim ðxðtmÞÞ≤μVim−1 ðxðtm−1ÞÞ≤μ2Vim−2 ðxðtm−2ÞÞ≤⋯
≤μNðt0 ;t ÞVi0 ðxðt0ÞÞ ð14Þ
vðxðt ÞÞ ¼ μNðt0 ;t Þvðxðt0ÞÞ⇒vðxðt ÞÞ≤μNðt0 ;t Þvðxðt0ÞÞ; ð15Þwhere Nðt0; t Þ is the number of switching times on the timeinterval ½t0; t Þ.Let us consider the maximum number of switching times Nðt0; tf Þ
on the time interval I ¼ ½t0; tf Þ (which satisfies Nðt0; tf Þ≥Nðt0; t Þ).Hence, it follows from the inequality in (15) and condition (iii) that
vðxðt ÞÞ≤μNðt0 ;t Þvðxðt0ÞÞ≤μNðt0 ;t Þmaxi∈S
supx∈Ω1
Viðxðt0ÞÞ
≤μN ðt0 ;tf Þmaxi∈S
supx∈Ω1
Viðxðt0ÞÞ
omini∈S
infx∈Ωc
2
Viðxðt ÞÞ; ð16Þ
for a μ41. So, we have that vðxðt ÞÞomini infx∈Ωc2Viðxðt ÞÞ, which
implies that xðt Þ∉Ωc2. This leads to a contradiction to the original
assumption. So, there is not a t∈½t0; tf Þ such that xðt Þ∈Ωc2, which
means that xðtÞ∈Ω2, ∀t∈½t0; tf Þ. □
Remark 2. The parameter Nðt0; tf Þ is the maximum number ofswitching times that can occur on the time interval I. If ðtf−t0Þ=TD

R. Kuiava et al. / European Journal of Control 19 (2013) 206–213 209
is an integer number, then Nðt0; tf Þ ¼ ðtf−t0Þ=ðTDÞ−1; otherwise,Nðt0; tf Þ ¼ intððtf−t0Þ=TDÞ.
For many physical switched systems, finding a family offunctions ViðxðtÞÞ satisfying the conditions of Theorem 1 may bedifficult, once that the constraints (i) and (ii) must be checkedalong the time interval I for all the Lyapunov functions of the setfV1;…;VNg. However, for some special classes of switched sys-tems, as it is shown in sequence for the class of switched affinesystems, more applicable results can be obtained from the generalresult presented in Theorem 1.
4. Practical stability of switched affine systems—the proposedsolution of Problem 2
Let us adopt the following sets Ω1 and Ω2:
Ω1 ¼ ⋂N
i ¼ 1Ω1i
; ð17Þ
Ω2 ¼ ⋃N
i ¼ 1Ω2i
; ð18Þ
where
Ω1i¼ fx∈Rn : ðx−xei Þ′Piðx−xei Þ þ dioαg;
Ω2i¼ fx∈Rn : ðx−xei Þ′Piðx−xei Þ þ dioβg;
being α and β two positive scalars satisfying αoβ, Pi∈Rn�n apositive definite matrix, di a nonnegative scalar, xei ¼ −A−1
i bi theequilibrium point of the subsystem i, considering that Ai isnonsingular and i¼1,…,N.
Next theorem provides sufficient conditions for practical sta-bility of the switched affine system (8) (Problem 2 presented inSection 2), considering the sets Ω1 and Ω2 given in the form of (17)and (18), respectively. The proposed result comes from theapplication of Theorem 1 to the problem under consideration hereby assuming a piecewise Lyapunov function given by
vðxðtÞÞ ¼ VsðtÞðxðtÞÞ ¼ ðx−xesðtÞ Þ′PsðtÞðx−xesðtÞ Þ þ dsðtÞ: ð19Þ
Theorem 2. Let the sets Ω1 and Ω2 be given in the form of (17) and(18), respectively, i.e., the positive definite matrices P1;…; PN , thescalars d1;…; dN40, α and β (αoβ) are known. If the conditionA′iPi þ PiAi≼0 is satisfied for all i∈S¼ f1;…;Ng, as well as, there exista scalar TD40 and a number μ such that the following matrixinequalities are satisfied:
eA′iTDPjeAiTD−μPi eA′iTDPjΔxeijn Δxeij′ PjΔxeij þ dj−μdi
" #≼0; ∀i; j∈S; i≠j; ð20Þ
1oμoffiffiffiffiffiffiffiffiβ=αNðt0;tf Þ
p; ð21Þ
where Δxeij ¼ xei−xej , then the switched affine system (8) is practi-cally stable with respect to Ω1 and Ω2 in the time interval I, for everyswitching signal sðtÞ satisfying (6) and (7) with a dwell-time T ¼ TD.
Proof. For the proof, we only need to show that conditionsA′iPi þ PiAi≼0, (20) and (21) lead, respectively, to the conditions(i)–(iii) of Theorem 1.Consider, in accordance to (6) and (7), that sðtÞ ¼ i∈S, ∀t∈½tk; tkþ1Þ,
where tkþ1 ¼ tk þ Tk with Tk≥T ¼ TD40, and that at t ¼ tkþ1 theswitching signal jumps to sðtÞ ¼ j∈S. From condition A′iPi þ PiAi≼0,it is seen that for all t∈½tk; tkþ1Þ, the time derivative of the Lyapunovfunction (19) along an arbitrary trajectory of the switched affinesystem (8) holds
_vðxðtÞÞ ¼ ðxðtÞ−xei Þ′ðA′iPi þ PiAiÞðxðtÞ−xei Þ≤0;
for all x∈Ω2, which satisfies the condition (i) of Theorem 1. Now, letus rewrite condition (20) as
eA′iTDPjeAiTD eA′iTDPjΔxeijn Δxeij′ PjΔxeij þ dj
" #≼μ
Pi 0n di
" #: ð22Þ
Multiplying (22) on the right and the left by ½eA′iðTk−TDÞ 1�′ and½eA′iðTk−TDÞ 1�, respectively, we have that
eA′iTk PjeAiTk eA′iTk PjΔxeijn Δx′eij PjΔxeij þ dj
" #≼μ
eA′iðTk−TDÞPieAiðTk−TDÞ 0n di
" #: ð23Þ
Using the inequality (23) we have
Vjðxðtkþ1ÞÞ ¼ ðxðtkþ1Þ−xej Þ′Pjðxðtkþ1Þ−xej Þ þ dj
¼ ðeAiTk ðxðtkÞ−xei Þ þ xei−xej Þ′PjðeAiTk ðxðtkÞ−xei Þ þ xei−xej Þ þ dj
¼ ðeAiTk ðxðtkÞ−xei Þ þ Δxeij Þ′PjðeAiTk ðxðtkÞ−xei Þ þ Δxeij Þ þ dj
¼ xðtkÞ−xei1
� �0 eA′iTk PjeAiTk eA′iTk PjΔxeijn Δx′eij PjΔxeij þ dj
" #xðtkÞ−xei
1
� �
≤μxðtkÞ−xei
1
� �0 eA′iðTk−TDÞPieAiðTk−TDÞ 0n di
" #xðtkÞ−xei
1
� �
≤μððeAiðTk−TDÞðxðtkÞ−xei Þ þ xei−xei Þ′PiðeAiðTk−TDÞðxðtkÞ−xei Þþxei−xei Þ þ diÞ
≤μððxðtkþ1−TDÞ−xei Þ′Piðxðtkþ1−TDÞ−xei Þ þ diÞ≤μViðxðtkþ1−TDÞÞ;
which leads to the condition (ii) of Theorem 1. Now, from the setsΩ1 and Ω2 given by (17) and (18), respectively, we have that
maxi∈S
supx∈Ω1
Viðxðt0ÞÞ ¼ α; mini∈S
infx∈Ωc
2
ViðxðtÞÞ ¼ β; ð24Þ
so, it is easy to notice that constraint 1oμoffiffiffiffiffiffiffiffiβ=αNðt0;tf Þ
pleads to the
condition (iii) of Theorem 1. □
The step-by-step procedure proposed below systematizes theuse of Theorem 2 to assess the practical stability of switched affinesystems providing a possible solution to Problem 2. This procedureincludes the computation of the sets Ω1 and Ω2.
Step1: Initialization—(i) read the matrices Ai and the vectors bi,∀i∈S; (ii) calculate the equilibrium point of each subsystem byxei ¼ −A−1
i bi and calculate the vectors Δxeij ¼ xei−xej , i; j∈S, i≠j; (iii)from a practical knowledge of the study system, specify a set ofpoints, x̂1;…; x̂m, that should be in Ω1 and a set of points, x1;…; xq,that should be in Ω2 and; (iv) specify a time interval of interestI¼ ½t0; tf Þ.
Step2: Computing the sets Ω1 and Ω2—(i) specify a value for αand β such that αoβ; (ii) build the computational representationof the matrix variables P1;…; PN , the scalar variables d1;…; dN , aswell as the variable λ40 and the LMIs:
ðx̂k−xei Þ′Piðx̂k−xei Þ þ dioα; ∀i∈S; ∀k¼ 1;…;m; ð25Þ
ðxk−xei Þ′Piðxk−xei Þ þ dioβ; for some i∈S; ∀k¼ 1;…; q; ð26Þ
Pi 0n di
" #≽λI; ∀i∈S; ð27Þ
A′iPi þ PiAi≼0; ∀i∈S; ð28Þ(iii) find the matrices P1;…; PN and the scalars d1;…;dN by solvingthe LMIs (25)–(28) as an optimization problem by maximizing λ.Doing so, the sets Ω1 and Ω2 are completely determined.

R. Kuiava et al. / European Journal of Control 19 (2013) 206–213210
Step3: Checking the size of Ω1 and Ω2—check the size of Ω1 andΩ2.1 If they are satisfactory, go to Step4; otherwise, repeat Step 2with a smaller(higher) value for β if Ω2 is too large (too small) orwith a smaller (higher) value of α if Ω1 is too large (too small).
Step4: Checking the practical stability for a specific TD—(i) specifya value for TD; (ii) compute the maximum number of switchingsNðt0; tf Þ that can occur within the time interval I; (iii) build thecomputational representation of the scalar variable μ and theLMIs:
1oμoffiffiffiffiffiffiffiffiβ=αNðt0;tf Þ
pð29Þ
eA′iTDPjeAiTD−μPi eA′iTDPjΔxeijn Δxeij ′PjΔxeij þ dj−μdi
" #≼0; ∀i; j∈S; i≠j; ð30Þ
(iv) solve the LMIs (29)–(30). If a feasible solution is found, stop;otherwise, repeat Step 4 with a higher value of TD.
Some important remarks about this step-by-step procedure aregiven in the following.
Remark 3. If a feasible solution is found in Step 4, then theswitched affine system is practically stable with respect to the setsΩ1 and Ω2, calculated in Step 2, within the time interval I for everyswitching signal sðtÞ satisfying (6) and (7) with a dwell-timeT ¼ TD.
Remark 4. Notice that the largest diameter of the sets Ω1 and Ω2
is minimized via LMI (27) by maximizing the smallest eigenvalueof Pi, i¼1,…,N.
Remark 5. The computation of the sets Ω1 and Ω2 via Step 2 andthe assessment of their sizes in Step 3 require a practical knowl-edge of the study system. In electric power systems, for example,the set Ω2 may be viewed as a representation of an operatingsecurity region, which means that the allowable range for thesystem variables is known and this information is essential for theStep 3. On the other hand, the set Ω1 includes the initial conditionscreated by a number of perturbations to which the system may besubject during its operation (these perturbations are usuallyknown in advance as the results of the process of contingencyscreening).
Remark 6. The matrix inequalities of Theorem 2 can be also usedto estimate regions Ω1 and Ω2 such that the switched affinesystem is practically stable with respect to these sets and forevery switching signal governed by a known dwell-time T ¼ TD.For that, consider Pi and di, i¼ 1;…;N, as variables and specify avalue to α and β such that β4α. Also, from the knowledge of thetime interval I, compute Nðt0; tf Þ. Finally, specify a value of μ thatsatisfies (21) and solve the LMIs A′iPi þ PiAi≼0, i¼ 1;…;N, and (20)for a known dwell-time T ¼ TD. The largest diameter of the sets Ω1
and Ω2 can be minimized via LMI (27) by maximizing the smallesteigenvalue of Pi, i¼ 1;…;N.
Remark 7. It is interesting to observe that Theorem 2 contains, asa particular case, the global asymptotic stability conditions forswitched linear systems, as proposed in Geromel and Colaneri[12]. To see that, consider bi ¼ 0, ∀i∈S in (8), which followsimmediately that Δxeij ¼ 0, ∀i; j∈S; i≠j, once the resulting switched
1 This evaluation can be done from a practical knowledge of the systemoperation. In electric power systems, for example, it is essential that the frequencyof the system be maintained close, generally 70.5 Hz, to its nominal frequency.Hence, the set Ω2 should not contain points outside this allowable range ofoperation. From the computational point of view, the size of Ω1 and Ω2 can beassessed by measuring the distance (in terms of norm computation) between theboundary of these sets and the selected points in Ω1 (i.e., x̂1 ;…; x̂m) and Ω2 (i.e.,x1 ;…; xq). So, if the sets of points x̂1;…; x̂m and x1 ;…; xq are far from the boundaryof Ω1 and Ω2, respectively, this is an indicative that these two sets are too large.
system is linear and the origin is its unique equilibrium point.Consider also the piecewise Lyapunov function (19) with di ¼ 0,∀i∈S. Hence, the resulting matrix inequalities in Theorem 2 areA′iPi þ PiAi≼0 and eA′iTDPjeAiTD−μPi≼0, which are exactly the condi-tions of global asymptotic stability for switched linear systems, asproposed in Geromel and Colaneri [12], with the imposition thatμo1.
5. Illustrative example
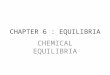
To demonstrate the applicability of the proposed procedure to aphysical system, a model of a synchronous generator connected tothe distribution grid was used. This setup , shown in Fig. 1, istypical of sugarcane processing plants that produce both sugar andethanol in Brazil, and use the waste of this process to power a stemturbine connected to the generator (in a process usually known ascogeneration). This model consists of a 132-kV, 60-Hz subtrans-mission system, which feeds a 33-kV distribution system througha 132/33-kV transformer (T1). The cogeneration plant (G) isconnected to the distribution network through a 33/16-kV trans-former (T2). This generator is represented by a synchronousmachine injecting 10MW into the grid. A local load (L) is con-nected to bus 3. The line connecting buses 2 and 3 is representedby the resistance R23 in series with the reactance X23.
A conventional static load model with constant impedance hasbeen adopted in this paper to represent the local load (L). Ingeneral, different types of loads can be connected in distributionfeeders. These types of loads can have different characteristics interms of time and power usages. In our practical example, weassume the local load (L) as being a simplified representation ofseveral different loads coupled to this bus and each of them can beactive or not during a period of operating of the distribution powersystem. The frequency of occurrence of load changes in the bus canbe forecasted in advance (and this information can be used toestimate the dwell-time T) and then the operating conditions ofthe system can be divided according to which load it supplies.Typical loads that demand large amounts of varying power fromthe network include, for example, electric arc furnaces. Obviously,this type of load may require a more accurate mathematical modelto analyze its impacts on power system dynamics, such as, hiddenMarkov based models [11], but this level of model complexity isnot taken under consideration in this paper.
For our purposes, we considered three different load levels:
L1 ¼ PL1 þ jQL1 ¼ 3:2þ j1:0 MVA;
L2 ¼ PL2 þ jQL2 ¼ 5:2þ j2:0 MVA
L3 ¼ PL3 þ jQL3 ¼ 7:2þ j3:2 MVA:
The distribution system with synchronous generator illustratedin Fig. 1 is described mathematically by a classical model asfollows:
_δðtÞ ¼wswðtÞ−ws; ð31Þ
2H _ωðtÞ ¼ Pm−E′qðλðtÞÞ2G11 þ E′qðλðtÞÞjV1jðG12ðλðtÞÞ cosðδðtÞÞþB12ðλðtÞÞ sinðδðtÞÞÞ−DðωðtÞ−wsÞ; ð32Þ
where δðtÞ and ωðtÞ are the state variables and represent thegenerator rotor angle and the angular speed, respectively, so thestate vector is xðtÞ ¼ ½δðtÞ ωðtÞ�′. Given that the load (L) is subject tovariations along the time, λðtÞ ¼ ½PLðtÞ QLðtÞ�′ is the vector with thevarying parameters, where PL and QL are, respectively, the activeand reactive powers of the load. Notice that E′qðλðtÞÞ, G11ðλðtÞÞ,G12ðλðtÞÞ and B12ðλðtÞÞ are dependent of λ, being E′q the quadratureaxis transient internal voltage of the generator, while G11, G12 andB12 are elements of the reduced bus admittance matrix. Thismatrix reflects the topological characteristics of the distribution

Fig. 1. Diagram of the study system.
2 In fact, the initial value of parameter β was 1.1, but in accordance to Step 3,this parameter was adjusted to the final value of 1.07.
R. Kuiava et al. / European Journal of Control 19 (2013) 206–213 211
network, including the resistance and reactance of the line 2–3,the reactances of the transformers and the load (L) impedance.Finally, ws is the synchronous speed, H is the inertia constant, Pm isthe mechanical power (turbine output) and jV1j is the magnitudeof the voltage at bus 1. Detailed information regarding theequations of the presented model and their respective parameterscan be obtained in Kundur [18].
The numerical values of the parameters are: ws ¼ 376:99 rad=s,H ¼ 1:5 s, D¼0.2, jV1j ¼ 1 p:u:, R23 ¼ 0:751 p:u:, X23 ¼ 0:242 p:u:,XT1 ¼ XT2 ¼ 0:05 p:u:, where XT1 and XT2 are the T1 and T2 trans-formers reactances, respectively.
The power distribution systemwith synchronous generator canbe then mathematically described in the compact form
_xðtÞ ¼ f ðxðtÞ; λðtÞÞ; ð33Þ
where the vectors xðtÞ∈R2 and λðtÞ∈R2 were previously defined andf : R2 � R2-R2. An equilibrium point xe of the system (33) (suchthat f ðxe; λÞ ¼ 0) is calculated for a specific operating condition (orload level), i.e, for a fixed value of λ. Hence, let us call theequilibrium point of (33) associated to the load level L¼ L1 (whichcorresponds to λ¼ λ1 ¼ ½PL1QL1 �′) as being xe1 . Similarly, the equili-brium points xe2 and xe3 are associated to the load levels L¼ L2 andL¼ L3, respectively. The calculated equilibrium points arexe1 ¼ ½0:1065 1�′, xe2 ¼ ½0:1152 1�′ and xe3 ¼ ½0:0828 1�′.
Let us consider a linearized representation of (33) in thevicinity of the equilibrium points xe1 , xe2 and xe3 . The ith linearizedmodel is given in the state-space form
Σi: Δ _xiðtÞ ¼ AiΔxiðtÞ; ð34Þ
where Ai∈R2�2 is the ith state matrix, ΔxiðtÞ ¼ xðtÞ−xei andi¼ 1;2;3. So, Σi correspond to the linear approximation of (33)in the vicinity of its equilibrium point xei .
Now, let us transform Σi into an affine system. This transforma-tion process is given by
Σi: Δ _xiðtÞ ¼ AiΔxiðtÞ⇒
_xðtÞ− _xei ¼ AiðxðtÞ−xei Þ⇒_xðtÞ ¼ AixðtÞ−Aixei⇒
Σ̂i: _xðtÞ ¼ AixðtÞ þ bi; ð35Þ
where, bi ¼ −Aixei and i¼ 1;2;3.Let us consider a time interval of interest I¼ ½t0; tf Þ, where t0
and tf are specified as 0 s and 125 s, respectively. We model the setof affine systems Σ̂1, Σ̂2 and Σ̂3 as a switched affine system withthe purpose of studying the practical stability of the system duringthe time interval I, in which switchings can occur among thesystems Σ̂1, Σ̂2 and Σ̂3. This means that the load levels can changeamong L1, L2 and L3 along the time interval I.
Hence, the switched affine system adopted to study thepractical stability of the distributed system with synchronous
generator under consideration is described by
_xðtÞ ¼ AsðtÞxðtÞ þ bsðtÞ; xð0Þ ¼ x0; ð36Þwhere s : I¼ ½0;125Þ-S¼ ½1;2;3�, being
A1 ¼0 376:9911
−0:2444 −0:0667
� �; b1 ¼
−376:99110:0927
� �;
A2 ¼0 376:9911
−0:2413 −0:0667
� �; b2 ¼
−376:99110:0944
� �;
A3 ¼0 376:9911
−0:2358 −0:0667
� �; b3 ¼
−376:99110:0862
� �:
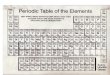
Now, the approximation of the power distribution system withsynchronous generators model in the form of the switched affinesystem (36) governed by a dwell-time is validated by means ofsome numerical simulations. Fig. 2(a) and (b) show the systemtrajectory (rotor speed, in Hertz) in a time interval of 30 s obtainedfrom the nonlinear model (31) and (32) (gray full line) and thesystem trajectory obtained from the approximated model in theform of the switched affine system (36) (black dashed line). Thesefigures were obtained by considering the time ellapsing betweentwo consecutive load variations is no smaller than 1 s (Fig. 2(a))and 5 s (Fig. 2(b)), which means that the dwell-time T is equal to1 s for the first case and 5 s for the second case.
As it can be seen in Fig. 2(a) and (b), the switched affine systemdescribes adequately (at least, for the operating conditions underconsideration) the system trajectory over a period of time wherechanges on the equilibrium conditions occur due to load varia-tions. Hence, from now and on we consider the power distributionsystem with synchronous generators modeled in the form of theswitched affine system (36) governed by a dwell-time.
The step-by-step procedure presented in the last section wasused to calculate the sets Ω1 and Ω2 for the study powerdistribution system and also to assess its dynamic behavior interms of practical stability.
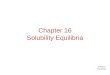
We adopted the sets Ω1 and Ω2 in the form given by (17) and(18), respectively. In accordance to the Step 2 of the proposedprocedure, four points (x̂1;…; x̂4) that should be in Ω1 and otherfour points (x1;…; x4) that should be in Ω2 were specified. Thesepoints are: x̂1 ¼ ½0:1 1:003�′, x̂2 ¼ ½0:1 0:997�′, x̂3 ¼ ½0:2 1�′,x̂4 ¼ ½0:0 1�′, x1 ¼ ½0:1 1:005�′, x2 ¼ ½0:1 0:995�′, x3 ¼ ½0:3 1�′ andx4 ¼ ½−0:1 1�′. The parameters α and β were specified as 1 and1.06,2 respectively. The calculated sets Ω1 and Ω2 are shown inFig. 3. As it can be seen, the set Ω2 represents a realistic operatingregion of a power system, where the rotor speed can varybetween, approximately, 59.55 Hz and 60.45 Hz, depending onthe value of the rotor angle.
After the computation of the sets Ω1 and Ω2 via Steps 2 and 3,the objective is to assess the practical stability of the study systemwith respect to these calculated sets within the time intervalI¼ ½0;125Þ. For that, the LMI problem of Step 4 was solved for aTD ¼ 6 s. Notice that t0 ¼ 0 s, tf ¼ 125 s and TD ¼ 6 s, which meansthat Nðt0; tf Þ ¼ 20 and the upper bound of (29) is 1.0047. The set ofLMIs was solved for μ¼ 1:0033. This completes the application ofthe proposed procedure. Hence, the power distribution systemunder consideration is practically stable with respect to the sets Ω1
and Ω2 shown in Fig. 3 within the time interval I ¼ ½0;125Þ forevery switching signal with a dwell-time T ¼ 6 s.
The system trajectory for an initial condition x0∈Ω1 and for aswitching signal with a dwell-time T ¼ 6 s is shown in Fig. 4. It canbe seen that the trajectory remains confined in Ω2 for all t∈I. Figs. 5shows a case where the system trajectory is not confinedin Ω2.

Fig. 2. System trajectory (rotor speed, in Hertz) of the nonlinear model (31) and (32) (gray full line) and the system trajectory of the approximated model in the form of theswitched affine system (36) (black dashed line): (a) T¼1 s; (b) T¼5 s.
Fig. 3. The sets Ω1 and Ω2 representing a realistic operating region of the powerdistribution system.
Fig. 4. System trajectory for an initial condition x0∈Ω1 and a dwell-time T ¼ 6 s.
Fig. 5. System trajectory for an initial condition x0∈Ω1 and a dwell-time T ¼ 1 s.
R. Kuiava et al. / European Journal of Control 19 (2013) 206–213212
6. Conclusions
This paper presented new results on practical stability analysisof some classes of continuous-time switched systems without acommon equilibria. Our results provide means to evaluate theconditions in which the system trajectories will be confined withina security operating region, as illustrated in the example of Section 5.
The motivation for focusing on practical stability of switched affinesystems under a time-dependent switching signal comes fromproblems in the area of stability of power systems (see, for example,[1,20,16]), in which the system trajectories must be confined into apre-specified region over a wide range of operating conditions, asalso illustrated in the numerical example.
Although the focus of this paper was the switched systemswithout a common equilibria, notice that the case of an uniqueand common equilibria among the subsystems, i.e., xei ¼ xej , ∀i; j∈S,leads the matrix inequality (20) to be similar (with di ¼ 0, ∀i; j∈S)to the main result presented in Geromel and Colaneri [12]. Hence,the proposed result may be used to assess the practical stability ofswitched systems with a common equilibria, but this application isnot investigated in this paper.
As already discussed in Section 3, to find a family of functionsViðxðtÞÞ satisfying the conditions of Theorem 1 may be difficult,once that the constraints (i)–(iii) must be checked along the timeinterval ½t0; tf Þ for all the Lyapunov functions of the set fV1;…;VNg.One of the future directions intended for this research is the use of

R. Kuiava et al. / European Journal of Control 19 (2013) 206–213 213
an extension of LaSalle's Invariance Principle, proposed in Rodri-gues et al. [21], to address this problem.
References
[1] M.J. Basler, R.C. Schaefer, Understanding power system stability, IEEE Transac-tions on Industry Applications 44 (2008) 463–474.
[2] A. Bemporad, G. Ferrari-Trecate, M. Morari, Observability ad controllability ofpiecewise affine and hybrid systems, IEEE Transactions on Automatic Control45 (2000) 1864–1876.
[3] P. Bolzern, W. Spinelli, Quadratic stabilization of a switched affine systemabout a nonequilibrium point, in: Proceeding of the American ControlConference, Boston, USA, 2004, pp. 3890–3895.
[4] S. Boyd, L.E. Ghaoui, E. Feron, V. Balakrishnam, Linear Matrix Inequalities inSystem and Control Theory, Society for Industrial and Applied Mathematics,1994.
[5] M.S. Branicky, Multiple Lyapunov functions and other analysis tools forswitched and hybrid systems, IEEE Transactions on Automatic Control 43(1998) 475–482.
[6] P. Colaneri, J.C. Geromel, A. Astolfi, Stabilization of continuous-time switchednonlinear systems, Systems and Control Letters 57 (2008) 95–103.
[7] D. Corona, J. Buisson, B.D. Schutter, A. Giua, Stabilization of switched affinesystems: an application to the buck-boost converter, in: Proceeding of the2007 American Control Conference, New York, USA, 2007, pp. 6037–6042.
[8] G.S. Deaecto, J.C. Geromel, J. Daafouz, Dynamic output feedback H∞ control ofswitched linear systems, Automatica 47 (2011) 1713–1720.
[9] G.S. Deaecto, J.C. Geromel, F.S. Garcia, J.A. Pomílio, Switched affine systemscontrol design with application to DC–DC converters, IET Control Theory andApplications 4 (2010) 1201–1210.
[10] R.A. Decarlo, M.S. Branicky, S. Pettersson, B. Lennartson, Perspectives andresults on the stability and stabilizability of hybrid systems, in: Proceedings ofthe IEEE, 2000, pp. 1069–1082.
[11] M.T. Esfahani, B. Vahidi, A new stochastic model of electric arc furnace basedon hidden Markov model: a study of its effects on the power system, IEEETransactions on Power Delivery 27 (2012) 1893–1901.
[12] J.C. Geromel, P. Colaneri, Stability and stabilization of continuous-timeswitched linear systems, SIAM Journal on Control and Optimization 45(2006) 1915–1930.
[13] J.C. Geromel, P. Colaneri, P. Bolzern, Dynamic output feedback control ofswitched linear systems, IEEE Transactions on Automatic Control 53 (2008)720–733.
[14] J.P. Hespanha, Uniform stability of switched linear systems: extensions ofLasalle's invariance principle, IEEE Transactions on Automatic Control 49(2004) 470–482.
[15] J.P. Hespanha, D. Liberzon, D. Angeli, E.D. Sontag, Nonlinear norm-observability notions and stability of switched systems, IEEE Transactions onAutomatic Control 52 (2005) 154–168.
[16] J. Hossain, H.R. Pota, V. Ugrinovskii, R.A. Ramos, A novel statcom control toaugment lvrt of fixed speed wind generators, in: Proceedings of the IEEEConference on Decision and Control, IEEE, Shanghai, China, 2009.
[17] T. Kaczorek, Positive switch 2d linear systems described by the general model,Acta Mechanica et Automatica 4 (2010) 36–41.
[18] P. Kundur, Power System Stability and Control, McGraw-Hill, 1994.[19] H. Lin, P.J. Antsaklis, Stability and stabilizability of switched linear systems: a
survey of recent results, IEEE Transactions on Automatic Control 54 (2009)308–322.
[20] R.A. Ramos, L.F.C. Alberto, N.G. Bretas, A new methodology for the coordinateddesign of robust decentralized power system damping controllers, IEEETransactions on Power Systems 19 (2004) 444–454.
[21] H.M. Rodrigues, L.F.C. Alberto, G.N. Bretas, Uniform invariance principle andsynchronization. robustness with respect to parameter variation, Journal ofDifferential Equations 169 (2001) 228–254.
[22] C. Seatzu, D. Corona, A. Giua, A. Bemporad, Optimal control of continuous-time switched affine systems, IEEE Transactions of Automatic Control 51(2006) 726–741.
[23] R. Shorten, F. Wirth, O. Mason, K. Wulff, C. King, Stability criteria for switchedand hybrid systems, SIAM Review 49 (2007) 545–592.
[24] X. Xu, G. Zhai, Practical stability and stabilization of hybrid and switchedsystems, IEEE Transactions of Automatic Control 50 (2005) 1867–1903.
[25] X. Xu, G. Zhai, S. He, Stabilizability and practical stabilizability of continous-time switched systems: a unified view, in: Proceedings of the IEEE AmericanControl Conference, New York, USA, 2007, pp. 663–668.
[26] X. Xu, G. Zhai, S. He, On practical asymptotic stabilizability of switched affinesystems, Nonlinear Analysis: Hybrid Systems 2 (2008) 196–208.
[27] G. Zhai, A.N. Michel, Generalized practical stability analysis of discontinuousdynamical systems, International Journal of Applied Mathematics and Com-puter Science 14 (2004) 5–12.
[28] G. Zhai, A.N. Mitchel, Generalized practical stability analysis of discontinuousdynamical systems, in: Proceedings of the 42nd IEEE Conference on Decisionand Control, 2003, Maui, Hawaii, pp. 1663–1668.