Embed Size (px)
Citation preview

PowerSystemSecurityAssessmentofthefutureNationalElectricityMarketAreportbytheMelbourneEnergyInstituteattheUniversityofMelbourneinsupportofTheIndependentReviewintotheFutureSecurityoftheNationalElectricityMarketJune2017

1
Power system security assessment of the future National Electricity Market
A report by the
Melbourne Energy Institute at the
University of Melbourne in support of the
‘Independent Review into the Future Security of the National Electricity Market’
June 2017
Lead author Prof Pierluigi Mancarella, Chair of Electrical Power Systems, School of Engineering Co-authors Mr Sebastian Puschel, School of Engineering Mr Lingxi Zhang, Visitor, School of Engineering Ms Han Wang, School of Engineering Prof Michael Brear, FIEAust, FAIE, Director, Melbourne Energy Institute Prof Terry Jones, School of Engineering and Melbourne Energy Institute Dr Matthew Jeppesen, School of Engineering Prof Robin Batterham, AO, School of Engineering and Melbourne Energy Institute Laureate Prof Robin Evans, FAA FTSE FIEEE FIEAust, School of Engineering Prof Iven Mareels, FTSE, FIEEE, FIEAust, CPEng, EngExec, Dean, School of Engineering

2
© Copyright 2017 Department of the Environment and Energy This report has been prepared by The University of Melbourne, on behalf of, and for the exclusive use of the Department of the Environment and Energy, and is subject to, and issued in accordance with, the provisions of the contract between the University and the Department of the Environment and Energy. The University accepts no liability or responsibility whatsoever for, or in respect of, any use of, or reliance upon, this report by any third party. The concepts and information contained in this document are the property of the Department of the Environment and Energy. Use or copying of this document in whole or in part without the written permission of the Department of the Environment and Energy constitutes an infringement of copyright.

3
Table of Contents
Table of Contents ............................................................................................................................. 3
Executive Summary ........................................................................................................................ 6
Technical Summary ......................................................................................................................... 8
List of acronyms ............................................................................................................................ 15
1. Introduction .......................................................................................................................... 16
2. Key definitions and concepts for frequency response security assessment 17
2.1. Key definitions and concepts ................................................................................ 17
2.1.1. Definition of “security” for the purpose of this work ............................ 17
2.1.2. Frequency response and system inertia ..................................................... 17
2.2. Frequency response in the current NEM .......................................................... 19
2.2.1. Current Frequency Control Ancillary Services (FCAS) arrangements .. ..................................................................................................................................... 19
2.2.2. Contingency FCAS requirements calculation ............................................ 20
2.3. Frequency response challenges in a low inertia power system .............. 21
2.4. Potential need for new operational requirements and constraints ....... 22
2.4.1. From static to dynamic frequency response requirements ................ 22
2.4.2. Mapping inertia-dependent frequency response requirements and constraints ............................................................................................................................. 23
2.5. Further considerations on system security aspects not covered ........... 25
3. Methodology for frequency response security assessment ................................ 26
3.1. Methodology for security assessment ............................................................... 26
3.1.1. General approach ................................................................................................. 26
3.1.2. “Unconstrained” frequency Nadir case (base case) ............................... 26
3.1.3. “Constrained” frequency Nadir case ............................................................ 27
3.1.4. Generation/demand combination snapshots considered in the analysis .................................................................................................................................... 28
3.1.5. Summary of the methodology for security assessment ........................ 29
3.2. Considerations on minimum synchronous inertia and interaction among inertial, primary and secondary frequency response ................................. 29
4. Scenario analysis ................................................................................................................. 31
4.1. Scenarios overview ................................................................................................... 31
4.1.1. The modelling scenarios ................................................................................... 31
4.1.2. Input data from modelling scenarios ........................................................... 31
4.2. Scenario results overview ...................................................................................... 34
4.2.1. Nadir ......................................................................................................................... 34
4.2.2. ROCOF ...................................................................................................................... 35
4.2.3. Inertia ....................................................................................................................... 37
4.2.4. PFR ............................................................................................................................ 39
4.3. Analysis of specific results for CET&LL scenario .......................................... 40
4.3.1. Nadir assessment for different damping factors ..................................... 41
4.3.2. ROCOF assessment for different damping factors .................................. 41
4.3.3. Inertia assessment for different damping factors ................................... 42
4.3.4. Impact of different ROCOF limits ................................................................... 43
5. Minimum synchronous generation analysis for CET&LL scenario .................. 45
5.1. General considerations and methodology ....................................................... 45
5.2. Static assessment of minimum synchronous generation level through FRSC-OPF ..................................................................................................................................... 46

4
5.2.1. Methodology .......................................................................................................... 46
5.2.2. MW value of minimum synchronous generation per year .................. 46
5.2.3. Comparison with the SNSP index .................................................................. 47
5.3. Dynamic assessment of minimum synchronous generation levels through Frequency Response Security Constrained Unit Commitment (FRSC-UC) ........................................................................................................................................... 48
5.3.1. Problem description and methodology ....................................................... 48
5.3.2. Results ...................................................................................................................... 50
5.3.3. Assessment of the system non-synchronous penetration (SNSP) ... 55
6. Role of new and alternative technologies and services........................................ 57
6.1. More than synchronous generators ................................................................... 57
6.2. Synchronous condensers ........................................................................................ 57
6.3. Fast Frequency Response ....................................................................................... 59
6.3.1. Fast Frequency Response (FFR) and Synthetic/Virtual Inertia ........ 59
6.3.2. Some numerical results ..................................................................................... 59
6.4. Dynamic contingency rescheduling and regional security analysis ...... 62
6.4.1. Dealing with transmission contingencies .................................................. 62
6.4.2. Example of transmission contingency analysis for South Australia 62
6.5. Advanced protection schemes .............................................................................. 65
6.6. New inertial response services ............................................................................ 66
6.6.1. Valuing “differentiated inertia” levels ......................................................... 66
6.6.2. Example: annual generation dispatch and benefits ............................... 66
6.7. Further considerations on frequency response services and technologies ............................................................................................................................... 68
7. Appendix: the National Electricity Market ................................................................ 69
7.1. General aspects of the NEM ................................................................................... 69
7.2. NEM operation ............................................................................................................ 69
8. Appendix: Emissions reduction modelling scenarios description and input data .................................................................................................................................................... 71
8.1. Scenario description ................................................................................................. 71
8.1.1. Business as Usual Scenario (BAU)................................................................. 71
8.1.2. Limited Lifetime (LL) ......................................................................................... 71
8.1.3. Clean Energy Target (CET)............................................................................... 71
8.1.4. Clean Energy Target and Limited Lifetime (CET&LL) ........................... 71
8.1.5. Emissions Intensity Scheme (EIS) ................................................................. 71
8.2. Input data ...................................................................................................................... 72
8.2.1. Electricity demand .............................................................................................. 72
8.2.2. Installed capacity by scenario ......................................................................... 73
8.2.3. Example of VRE generation profiles ............................................................. 75
9. Appendix: Main definitions, modelling assumptions and input data for system security studies .............................................................................................................. 77
9.1. Security: general definition and definition for the purpose of this work .. ........................................................................................................................................... 77
9.2. Definition of credible and noncredible contingencies in the NEM ......... 78
9.3. Main assumptions for FCAS and frequency response modelling ............ 79
9.4. Main operational limits adopted in the base case security assessment studies .......................................................................................................................................... 80
9.5. Definition of the System Non-Synchronous Penetration (SNSP) level index ........................................................................................................................................... 81

5
9.6. Specific input data for FRSC-UC studies for dynamic assessment of minimum synchronous generation levels ...................................................................... 81
9.7. Further information on main input data and assumptions used for the security assessment studies for all scenarios ............................................................... 82
9.7.1. General inputs and assumptions ................................................................... 82
9.7.2. Snapshots scenarios ........................................................................................... 83

6
Executive Summary
This report has been written by the Melbourne Energy Institute (MEI) at the University of Melbourne in support of the ‘Independent Review into the Future Security of the National Electricity Market’ (the Review) chaired by Dr Alan Finkel AO. The Review has commissioned Jacobs to model a number of emissions reduction policy scenarios. The generation portfolios resulting from five modelling scenarios have then been used as inputs to the University’s assessment of power system security in the National Electricity Market (NEM).
Each of these scenarios features generation portfolios with increasing penetration of Variable Renewable Electricity (VRE) sources out to 2050. Such systems may raise security concerns since most VRE technologies do not typically provide the so-called inertia, which has historically been one of the main means of regulating the AC system frequency to (nominally) 50Hz.
This report therefore focuses on so-called frequency response adequacy, i.e., assessing whether the dynamic response of a given generation portfolio following a so-called contingency event would be adequate to return the system frequency to 50Hz without disruptions to energy supply. The main contingency event considered in this report is the loss of the largest operating generator in the network, which is standard practice in such studies.
The report first defines key terms and concepts, then presents the methodology used to undertake these security assessment studies, and finally presents the relevant results. The work performed includes:
1. Analysis of future power system security under each scenario, and advice on what subsequent actions may be required to establish power system security, if needed; and
2. Analysis of the minimum level of inertia required in the so-called Clean Energy Target and Limited Lifetime (CET&LL) scenario.
Whilst a comprehensive analysis of system security is beyond the scope of this work, these analyses highlight two main points:
1. Without implementation of appropriate operational measures, the NEM will experience increasing issues of frequency control in all modelled scenarios, including the Business As Usual case.
2. There is significant potential to use several operational measures and electricity market designs to ensure frequency response adequacy in VRE-rich power systems.
Such operational measures and market designs could drive the generation portfolio’s operation so that the dynamic response of the system after a potential contingency event is constrained to return the system frequency to 50Hz. Indeed, frequency response adequacy appears achievable in all of the scenarios studied in this report.
Furthermore, whilst inertia-bearing generation is likely to remain important, our analyses also show that there are a number of other technologies and services

7
that can provide so-called Fast Frequency Response (FFR) and therefore also legitimately play a significant role in supporting frequency regulation. This includes demand response, energy storage of several forms, and the so-called synthetic inertia in newer wind turbines, amongst others. Other means to increase the system inertia, such as synchronous condensers, could also assist in providing this support.
More broadly, numerous technologies and services could provide frequency support given careful electricity market design that does not discriminate unfairly among these technologies and services. This could also include operational services using emerging techniques such as dynamically rescheduling for the current largest contingency and simultaneously scheduling inertia and frequency response. Such approaches may be particularly useful in systems with potentially very low inertia, as might occur in a region of the power system that is at risk of becoming islanded or has become islanded after an interconnector failure. In these cases, specific arrangements for provision of frequency response and system inertia should be made regionally, in addition to simultaneously controlling frequency for the NEM as a whole.
Finally, it should be highlighted that frequency stability is not the only important aspect of system security in a future NEM. These other aspects, which were out of the scope of this work, require detailed further study.

8
Technical Summary
Given the concerns in running low inertia power systems that might result from the widespread penetration of VRE sources, this report focuses on so-called frequency response adequacy, i.e., assessing whether the frequency response of a given generation portfolio would be adequate following a contingency event. The main contingency event considered in this report is the loss of the largest operating generator in the network, which is standard practice in such studies.
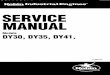
Figure 0.1 illustrates how system frequency could change after the same contingency event in high and low inertia power systems with the same demand. The contingency event is the loss of a large generator in both cases. The key parameters involved are:
the Rate Of Change Of Frequency (ROCOF): the initial slope of the frequency change immediately following the contingency event;
the Frequency Nadir: the minimum frequency that is reached following the contingency event;
the Quasi Steady-State Frequency (QSSF): the steady-state frequency that is reached after the scheduled generators automatically provide the so-called primary frequency response (PFR) to its nominal output.
The capacity of PFR scheduled in Figure 0.1 is deliberately the same for the two inertia cases, and calculated on the basis of current static requirements. This yields the same QSSF, which is independent of the amount of inertia in the system. However, a lower inertia system experiences a lower frequency Nadir, which also occurs earlier. This is partly due to the lower inertia system having a higher ROCOF immediately after the contingency event.
Figure 0.1: Simulated effect of lower inertia on system frequency response, with key parameters defined, after a given contingency event

9
Methodology
Traditionally, synchronous generators with physical inertia that is associated with their rotational kinetic energy have proven effective in providing frequency response adequacy. However, Figure 0.1 suggests that the provision of PFR, and more generally so-called Frequency Control Ancillary Services (FCAS) that include PFR, needs to be reconsidered as the proportion of synchronous generation in the power system reduces. In order to operate a stable system, all three of the parameters in Figure 0.1 that characterise frequency response - the ROCOF, the frequency Nadir and the static requirement for QSSF - should be constrained in order to avoid further consequences, such as additional generation disconnection, which could end up in a cascaded event.
Figure 0.2 illustrates the need to constrain all three of these parameters in the general frequency control problem. This frequency response security map shows the (shaded) secure area in which all three of these constraints are observed for systems with varying amounts of PFR and system inertia. The vertical line depicts the level of inertia that corresponds to a desired ROCOF limit, whilst the horizontal line corresponds to the static PFR requirement for a desired QSSF limit. The red curve depicts the desired limit for the frequency Nadir. The secure area resides above all three curves. Thus, high inertia systems are typically constrained by static requirements that are independent of the system inertia, i.e. the secure area is bounded by the horizontal line. However, when transitioning towards lower inertia systems, both the frequency Nadir limit (the red curve) and the ROCOF limit (the vertical line) may become binding. Since the secure area for low inertia systems is bounded by both the frequency Nadir and ROCOF requirements, the scheduled PFR must therefore be higher than the static requirement whilst also taking into account the current system inertia.
Figure 0.2: Frequency response security map showing the secure area of operation for different levels of primary frequency response (PFR) and system inertia

10
This report therefore considers two cases with different forms of generation dispatch:
1. A base case: which approximates the current provision of FCAS in the National Electricity Market (NEM) with static requirements on frequency response and no explicit consideration of system inertia;
2. A Frequency Response Security Constrained Optimal Power Flow (FRSC-OPF) case: which takes into account the on-line system inertia and dispatches energy and FCAS so as to observe the desired limits on the ROCOF, the frequency Nadir and the QSSF.
The FRSC-OPF tool used in this study thus performs a co-optimization of all the resources that can meet all frequency response requirements, including inertial response, and optimally schedules generating units and other available resources to provide FCAS.
Key findings
While there are significant challenges in operating a low inertia power system, the analyses performed demonstrate that there is significant potential to use operational measures and electricity market designs to ensure frequency response adequacy in VRE-rich power systems. Such operational measures and market designs could co-optimize inertia and FCAS so that the system remains secure after a potential contingency event. Indeed, frequency response adequacy appears achievable in all of the scenarios studied in this report.
A summary of the results is shown in Figure 0.3. Generation portfolios from the following five scenarios were used as inputs to the University’s assessment of power system security:
1. Business As Usual (BAU) 2. Limited Lifetime (LL) 3. Clean Energy Target and Limited Lifetime (CET&LL) 4. Clean Energy Target (CET) 5. Emissions Intensity Scheme (EIS)
Further analysis of the CET&LL scenario was also performed to estimate the minimum synchronous generation level that could ensure frequency adequacy. This analysis was not performed for the other four scenarios as the results are expected to be similar.
Figure 0.3 shows that the frequency Nadir that could be experienced in the presence of maximum and minimum demand in 2050 for each scenario, following the chosen contingency of a loss of 700MW of synchronous generation. Results for all scenarios with the base case, applying the current static requirements (top), and the FSRC-OPF case (bottom) are shown. The frequency Nadir that could be experienced depends strongly on different VRE penetrations that occur in each scenario. These results also show that it is possible to operate the system so as to confine the frequency Nadir to the desired 49.2Hz limit in all cases. This limit is argued to be a reasonable security limit and is discussed further in the report, but other limits could be applied as well.

11
Figure 0.3: Nadir level after contingency without explicit frequency Nadir and ROCOF constraints (top) and with Nadir constraint of 49.2Hz and ROCOF constraint of 1Hz/s. Comparison of all scenarios in different years, with load damping factor of 2%/Hz
Figure 0.4 shows the evolution of the associated amount of inertia that is scheduled in the system at times of maximum and minimum demand for the base case and FRSC-OPF cases in the CET&LL scenario. The FRSC-OPF schedules higher levels of system inertia given the joint requirements of more kinetic energy and FCAS provided by the synchronous units. The figure also shows how the amount of system inertia could change due to different demand “damping factor” values that might apply in the future, which describe how demand varies following a frequency event.
It was also found that the system could securely run with a minimum synchronous generation output in the order of 25% of the minimum demand (approximately 4GW of around 17GW, with associated system inertia of about 48GWs) in 2050 for the CET&LL scenario. On the other hand, for higher demand levels the system could securely run with even lower levels of minimum

12
synchronous generation output and inertia. It is emphasised that these values are approximate and require simultaneous provision of suitable amount of scheduled FCAS and inertia, as can be determined by dynamic optimization studies as presented in this report.
Indeed, given the complex and dynamic interplay between inertia and FCAS, ‘rules of thumb’ approaches that statically determine the minimum level of synchronous output are necessarily only estimates. Therefore, there may be scope for improved system level outcomes if frequency response constraints in the system dispatch engine, as done in the FRSC-OPF case above, are used to dynamically co-optimise all the system resources, including the available synchronous inertia. Figure 0.5 further demonstrates how inertia, PFR, renewable (asynchronous) generation and demand might interact dynamically using the FRSC-OPF approach. The PFR and inertia requirements are correlated, with PFR being higher when the system has lower inertia and vice versa. It can also be appreciated how lower inertia coincides with periods of higher VRE output and therefore of lower net demand (demand minus renewable output) that is to be covered by conventional generation.
Role of new technologies and services
Whilst inertia-bearing synchronous generation is likely to continue to play an important role in supporting frequency stability in the future, there are a number of technologies and services that could also play a significant part. This is particularly because frequency Nadir requirements appear to be important in future systems, at least at the NEM level.
New technologies and services that can operate on these timescales to provide so-called Fast Frequency Response (FFR) are therefore expected to have an important future role. These include demand response, energy storage of several
Figure 0.4: Evolution of system inertia for different demand damping factors and for maximum and minimum demand for the CET&LL scenario: without constraints (i.e., base case, left) and with a Nadir constraint of 49.2 Hz and ROCOF constraint of 1Hz/s (i.e., FRSC-OPF case, right)

13
forms, and the so-called synthetic inertia in newer wind turbines, amongst others. Other means to increase the system inertia, such as synchronous condensers, could also assist in providing this support.
More broadly, numerous technologies and services could provide frequency support given careful electricity market design that does not discriminate unfairly among these technologies and services. This could also include further operational services such as dynamically rescheduling for the current largest contingency or use of advanced protection technologies such as system integrity protection schemes that “inter-trip” specific contingencies and frequency response activation. Such approaches may be particularly useful in systems with potentially very low inertia, as might occur in a region that is at risk of becoming islanded or has become islanded after an interconnector failure. In these cases, specific arrangements for provision of frequency response and system inertia should be made regionally, in addition to simultaneously controlling frequency for the NEM as a whole.
Figure 0.5: Example of primary frequency response (PFR) and system inertia requirements (top), as co-optimized by the FRSC-OPF algorithm with the frequency Nadir constrained, and the corresponding system net demand and variable renewable electricity (VRE) generation profiles (bottom) for a day in the CET&LL scenario in 2050

14
Finally, it should be pointed out that, whilst frequency stability boundaries are likely to be more critical in a lower inertia NEM, a full system security assessment will require consideration of a number of other aspects. These include consideration of rotor angle stability, voltage stability and reactive power support, short-circuit strength, new balancing reserves, and so on. These other aspects, which were out of the scope of this work, require detailed further study.

15
List of acronyms
General acronyms AEMO Australian Energy Market Operator CCGT Combined Cycle Gas Turbine DFIG Doubly-Fed Induction Generator FCAS Frequency Control Ancillary Services FFR Fast Frequency Response FRSC-OPF Frequency Response Security Constrained Optimal Power Flow FRSC-UC Frequency Response Security Constrained Unit Commitment NEM National Electricity Market OCGT Open Cycle Gas Turbine OPF Optimal Power Flow PFR Primary Frequency Response PV Photovoltaic QSSF Quasi Steady-State Frequency ROCOF Rate of Change of Frequency SFR Secondary Frequency Response SNSP System Non-Synchronous Penetration UFLS Under-Frequency Load Shedding UC Unit Commitment VRE Variable Renewable Electricity Emission Reduction Modelling Scenarios BAU Business As Usual LL Limited Lifetime CET&LL Clean Energy Target and Limited Lifetime CET Clean Energy Target EIS Emission Intensity Scheme

16
1. Introduction
This report has been written by the Melbourne Energy Institute (MEI) at the University of Melbourne in support of the ‘Independent Review into the Future Security of the National Electricity Market’ (the Review) chaired by Dr Alan Finkel AO.
The Review has commissioned Jacobs to model a number of emissions reduction policy scenarios. The generation portfolios resulting from five modelling scenarios have then been used as inputs to the University’s assessment of power system security.
Within the project scope, this document illustrates the main modelling assumptions and results from the security studies, specifically providing:
1. Analysis of and advice on the security1 of the future power system under each of the policy scenarios and what subsequent actions may be required to establish power system security, in case.
2. Analysis of the minimum level of synchronous generation to be applied to the Clean Energy Target and Limited Lifetime (CET&LL) scenario.
Given the concerns in running low-inertia power systems that might result from large penetration of Variable Renewable Electricity (VRE) sources, focus has been placed on frequency response adequacy, i.e., on assessing whether the portfolio of given resources is frequency-stable following a contingency event, e.g., the loss of the largest operating generator.
To that end, a suite of tools has been specifically built. In particular, as a key output, a new bespoke model has been developed to perform a Frequency Response Security Constrained Optimal Power Flow (FRSC-OPF) that explicitly takes into account change of system inertia levels and considers new operational constraints on a key set of frequency response parameters. The results from the FRSC-OPF are compared to a base case simulation platform resembling the current provision of Frequency Control Ancillary Services (FCAS) with only static requirements on frequency response and no consideration for system inertia.
This report is organised as follows. Section 2 introduces key definitions and concepts for the analysis of low-inertia power systems, which are then used to build the security assessment methodology presented in Section 3. Section 4 presents the main results from the analysis conducted for the emissions reduction policy scenarios, while Section 5 focuses on the concept of minimum synchronous generation with specific application to the CET&LL scenario. Section 6 then discusses the potential role of new technologies and services. Various Appendices finally summarize additional information, data and assumptions used in the analysis.
1 ‘Security’ is primarily intended here in the sense of frequency response adequacy in a low-inertia power system context.

17
2. Key definitions and concepts for frequency response security assessment
2.1. Key definitions and concepts
2.1.1. Definition of “security” for the purpose of this work
For the purposes of this work, focus has been placed on frequency response adequacy aspects, which may become a particularly severe issue with larger penetration of non-synchronous renewable energy sources and therefore in lower inertia systems, as already experienced in the recent Black System event in South Australia in September 2016. More specifically, we have addressed this general security issue by assessing whether, in each modelling scenario under analysis, there were sufficient resources and facilities (to be operated with appropriate operational requirements and strategies) to guarantee adequate system frequency response following a disturbance (or “contingency”). However, considerations on the other aspects of power systems security have also been provided both quantitatively and/or qualitatively.
2.1.2. Frequency response and system inertia
For power systems to operate correctly, energy demand and supply need to be in balance at all times, on a second by second basis. The system frequency is a measure of this instantaneous balance and it can only deviate within a narrow band around 50Hz to prevent equipment damage, disconnection, and potential cascading effects that may lead to a black system.
Large disturbances or contingencies such as the sudden loss of a generator or the trip of an interconnector between regions can alter the supply-demand balance and lead to serious and potentially dangerous frequency excursions.
Suitable means are therefore in place to control the frequency within desired levels and provide frequency response to contingencies. This is usually obtained by procuring Frequency Control Ancillary Services (FCAS) in the market from the available resources.
The main providers of FCAS have traditionally been conventional generating units that provide automatic response2 to a change of frequency through the so-called Primary Frequency Response (PFR). However, the demand side can also provide frequency response support, for example through load disconnection.
A typical example of system frequency response following generation loss can be seen in the simulation results shown in Figure 2.1. The automatic PFR from generators usually starts after a few seconds following the contingency, when
2 The automatic response of a generator providing primary frequency response (PFR) is usually activated through its governor that senses a change in frequency and increases/decreases the generator’s power output in response to a frequency drop/rise accordingly.

18
additional power is injected to stop the frequency drop and then stabilise to a certain level (“Quasi Steady-State Frequency - QSSF”). Further units then increase their output to bring the frequency back into the “normal” operational band, which is often indicated as Secondary Frequency Response3 (SFR), and maintain it there until further notice before the 5 minutes dispatch takes over4.
However, before generators or other resources can respond automatically to any frequency change (which requires inevitable delays due to frequency variation sensing, activation of the relevant equipment to respond, etc.), there is a natural response that take place in the system. This is called Synchronous Inertial Response – or simply “inertial response” – and is associated to the kinetic energy that is embedded in the spinning masses of the generators (and some loads, primarily motors) that rotate “synchronously” with each other and at a speed that corresponds to 50Hz in terms of system frequency. The very moment that the supply-demand equilibrium is broken, for example due to the loss of a generator, part of this kinetic energy is released into the system in order to preserve the energy balance. This comes at the cost of the synchronous generators slowing down, which means that the frequency also drops. Generally speaking, the larger the rotating kinetic energy in the system (which depends on the physical “inertia” of all the machines that are synchronously connected), the slower the frequency changes; it is in fact this kinetic energy that prevents the frequency from changing too fast, thus giving time to the PFR to respond.
The amount of kinetic energy in the system (measured in MWs) is thus generally associated with “system inertia”5.
3 This is normally done following control signals by the system operator, but can also be done independently, depending on the market and system operation environment.
4 Other frequency control means also interact at this level, such as the “Regulation” service activated by Automatic Generation Control (AGC) by AEMO, so that the frequency can return to its nominal 50Hz value.
5 Even if there may be different definitions of “inertia”, the fundamental physical concept is nevertheless associated to the amount of kinetic energy in the system (in [MWs]) at any point in time. For the purposes of this work, we will therefore use system “kinetic energy” and “inertia” as synonyms.

19
Figure 2.1: Example of frequency response services timescales
2.2. Frequency response in the current NEM
2.2.1. Current Frequency Control Ancillary Services (FCAS) arrangements
There are eight markets in the NEM for procuring FCAS6, which are co-optimised with energy dispatch every five minutes, namely, two for Regulation and six for Contingency at different time scales of delivery. More specifically: 1. Regulation Raise: Regulation service used to correct a minor drop in
frequency. 2. Regulation Lower: Regulation service used to correct a minor drop in
frequency. 3. Fast Raise (6 Second Raise): 6 second response to arrest a major drop in
frequency following a contingency event. 4. Fast Lower (6 Second Lower): 6 second response to arrest a major rise in
frequency following a contingency event. 5. Slow Raise (60 Second Raise): 60 second response to stabilise frequency
following a major drop in frequency. 6. Slow Lower (60 Second Lower): 60 second response to stabilise frequency
following a major rise in frequency. 7. Delayed Raise (5 Minute Raise): 5 minute response to recover frequency to
the normal operating band following a major drop in frequency. 8. Delayed Lower (5 Minute Lower): 5 minute response to recover frequency to
the normal operating band following a major rise in frequency.
6 AEMO Guide to ancillary Services: https://www.aemo.com.au/-/media/Files/PDF/Guide-to-Ancillary-Services-in-the-National-Electricity-Market.ashx

20
Focusing on the FCAS contingency services, the Fast service aims at arresting a change in system frequency within 6s following a frequency event, then orderly transitioning to the 60s Slow service which in turns aims at stabilizing the frequency following the event. Broadly speaking, these two combined services can be associated to the provision of inertial response and Primary Frequency Response (PFR) services discussed above 7 and are typically activated automatically through generator governor response or load control through local frequency measure. The Slow service then provides an orderly transition to the Delayed service; the latter broadly corresponds to a Secondary Frequency Response (SFR) service, aiming at restoring the frequency towards its nominal level within 5 minutes and until further notification from the next dispatch intervals. This is usually provided through rapid unit loading/unloading based on delayed frequency threshold controllers.
2.2.2. Contingency FCAS requirements calculation
The general rule to calculate the contingency FCAS requirements8, in MW, is
Requirement = Contingency Risk – Load Relief
where the “Contingency Risk” is the potential MW change for a contingency (largest generator, load block, etc.), while the “Load Relief” corresponds to the demand variation due to the relevant frequency variation reference for the specific service9, proportional to the frequency variation itself and the demand level at the time of the contingency.
The load “relief”, also known in the literature as “damping”, always goes in the direction of alleviating the frequency variation (hence its name), mainly caused by electric motors connected as load drawing, for example, less active power as the frequency drops.
Based on this discussion, it can be appreciated how the current FCAS requirements are “static”, in the sense that they only depend on the largest credible contingency and the incumbent demand level, but do not depend on other specific system conditions (e.g., amount of inertia in the system).
7 It has to be highlighted that, for the sake of terminology, the inertial response is often implicitly incorporated within the primary frequency response.
8 The general rule applies for different types of contingency, including generation, network, etc., while specific numerical values to be used in the relevant parameters may change with the case.
9 For both Slow and Fast services the reference frequency level for load relief calculation is 49.5Hz, while for Delayed service it is 49.85Hz (0.15 Hz is the “dead-band” currently adopted for normal operation before a contingency service is to be activated).

21
2.3. Frequency response challenges in a low inertia power system
As previously mentioned, it is intuitive that the larger the amount of kinetic energy in the system, the more there will be “inertia” to changes in the system frequency. It is in fact the inertial response that, by slowing down frequency changes, allows “buying” sufficient time for the controls available in the system to have sufficient time to react and generators to provide PFR before reaching frequency limits. Therefore, it is also intuitive to understand that if the level of inertia in the system decreases, new challenges will arise in terms of keeping the frequency within the predefined operational bands.
Most VRE sources are physically decoupled from the system frequency as they are asynchronously connected to the grid through power electronic converters/inverters and, therefore, do not contribute to system inertia. These sources include, in particular, modern wind turbines based on Doubly-Fed Induction Generator (DFIG) and on full power converter connected generators, as well as Photovoltaic (PV) generators. Therefore, with more and more energy output from wind and PV, the system level of inertia could inevitably drop.
In addition, the secure provision of Primary Frequency Response (PFR), traditionally provided by governor response of conventional generators, is challenged too. In fact, now not only are there fewer conventional generators online capable of providing PFR (as they are partly displaced by renewable generators in system operation), but they also have less time to react since the lower system inertia leads to faster frequency dynamics. Eventually, the overall PFR available from these online conventional generators might not be sufficient to cope with these faster frequency variations.
An example of the potential frequency challenges that could be found in lower inertia systems with more VRE output is shown in Figure 2.2, whereby the frequency change following a same large generation loss is analysed for two different levels of inertia and same demand.
In this example the PFR amount is deliberately the same for the two inertia cases, and calculated on the basis of the current static requirements on the contingency and incumbent demand levels. This yields a same “static” level of Quasi Steady-State Frequency (QSSF), which is in fact independent of the level of inertia in the system as it only depends on the steady-state output from the generators scheduled to provide PFR reserve.
However, a lower inertia system could experience a much lower minimum frequency (technically called frequency “Nadir”); in addition, the frequency Nadir occurs much earlier with lower inertia, which, as mentioned above, gives less time to the scheduled PFR resources to react.
Another key parameter of relevance in assessing frequency response adequacy is the Rate Of Change Of Frequency (ROCOF) [Hz/s] immediately after the contingency. Clearly, the ROCOF is much higher for the lower inertia system, which also contributes to reaching a faster and lower frequency nadir.

22
Figure 2.2: Illustration of the effects of lower inertia in system frequency response (with focus on the inertia and primary frequency response timescales)
2.4. Potential need for new operational requirements and constraints
2.4.1. From static to dynamic frequency response requirements
As mentioned earlier, the current FCAS arrangements correspond to only “static” conditions corresponding to steady-state frequency reference levels and not changing with system conditions such as the level of inertia. There is, in fact, an implicit assumption that there is sufficient inertia in the system to provide adequate frequency response based only on the static requirements.
However, as seen from the above example, the frequency response of the system may change significantly with system inertia even if the scheduled generation to provide PFR (which determines the QSSF) is the same, and there is no guarantee that ROCOF and/or frequency Nadir do not breach any operational limit.
In lower inertia systems there may therefore be scope for reconsidering the operational strategies that have historically proven very effective in “traditional” power systems where synchronous inertia is plentiful10.
10 In fact, AEMO considers frequency response requirements that are inertia-dependent for example for Tasmania (AEMO, “Proposed FCAS Calculation Changes in Tasmania”, June 2014). Furthermore, prior to the September 2016 Black System event in South Australia, AEMO implemented inertia constraints in SA under certain circumstances (AEMO and Electranet, “Update to Renewable Energy Integration in South Australia”, Feb 2016), and these were increased following that event (AEMO, “Black System South Australia 28 September 2016”, March 2017).

23
Furthermore, as the level of VRE changes in time, so does the system inertia and therefore the inertial response, so that, overall, new frequency response requirements that change dynamically and in function of the incumbent system operation characteristics may need to be introduced.
Considerations on ROCOF and frequency Nadir limits
ROCOF should not normally exceed certain values to prevent tripping of embedded generation or damage to conventional generators. Typical values of maximum allowed ROCOF in different countries varies between 0.125 and 1 Hz/s, and depends on several factors, including the specific embedded generation protection settings, the size of the system and the penetration VRE sources. The ROCOF might also be limited in order to indirectly prevent unacceptably low frequency Nadir or Under-Frequency Load Shedding (UFLS). A ROCOF limit of 1Hz/s is used in this work, which is considered a reasonable upper bound for future operation.
The frequency Nadir should not fall to below 49 Hz, since this may also jeopardise system operation in different ways. UFLS is therefore usually activated at frequency levels around 49Hz.
2.4.2. Mapping inertia-dependent frequency response requirements and constraints
A visual representation of new frequency response requirements that might be required in low-inertia systems is provided in Figure 2.3, showing the different relations between the required PFR and system inertia after contingency for the set of static and dynamic security constraints that are used in the analysis. These constraints, arising from the solution of the fundamental system frequency response dynamic equation, guarantee the ability of the system to exhibit a frequency response within a specified minimum frequency Nadir level, keep the ROCOF within a maximum limit, and reach a predetermined quasi-steady state frequency level.
In particular, the new requirements are mapped in a plot PFR vs Inertia, where, for a given contingency level:
Vertical lines depict the maximum acceptable ROCOF. In fact, the minimum
inertia requirement to comply with ROCOF only depends on the size of the
contingency in the system. This means that, for a given contingency size,
each ROCOF limit will produce one level of minimum inertia requirement.
Therefore, by changing the ROCOF limit ceteris paribus there will be a family
of vertical lines in the plot.
Horizontal lines are associated to the static primary frequency response
requirement to reach quasi-steady state. The PFR requirement is calculated
considering the quasi-steady state frequency requirement, the size of the
contingency, the demand damping factor, and the demand level. In
particular, keeping all other parameters constant, different demand levels
will correspond to a family of horizontal lines. The higher the demand level,

24
the more load relief due to the damping factor will be provided, and the PFR
requirement will decrease.
Hyperbolic-like curves determine the response requirement to meet the
minimum allowed frequency Nadir for different demand levels. Since again
the demand level plays a substantial role in relieving the frequency change
after contingency, it also impacts on the joint requirements on PFR and
inertia levels to constrain the frequency Nadir. For higher demand levels and
given a target minimum frequency Nadir level, in particular, the minimum
required combined amount of PFR and inertia decreases.
For a given system operation point, that is, for given demand level, contingency size, load damping factor, desired ROCOF, frequency Nadir and quasi-steady-state frequency limits, then the security map will have only one vertical line (ROCOF requirement), one horizontal line (static requirement) and one frequency Nadir curve requirement. Since all constraints represent a minimum requirement for PFR, inertia, or the combination of both, the area of secure operation points is above the intersection of all constraints, as from depicted in Figure 2.3.
Figure 2.3: Frequency response requirements map and secure area of operation for different levels of primary frequency response and system inertia, for given demand and contingency levels
In particular, when looking at the system inertia levels, it can be noticed how for high-inertia systems the static PFR requirements dominate the dynamic frequency Nadir requirements in spite of the inertia level. This explains why inertia is generally not explicitly modelled in frequency response requirements in systems where synchronous generators are plentiful, and there is no need for co-optimizing inertia and FCAS. However, while moving towards lower inertia systems, the frequency Nadir requirements could dominate the static requirements, and for each inertia level there is a minimum PFR that needs to be provided to meet the frequency Nadir, which calls for co-optimization of inertia

25
and FCAS. Furthermore, inertia would also need to be limited to prevent the system from operating in a region with excessive ROCOF.
2.5. Further considerations on system security aspects not covered
It should be pointed out that, while frequency stability boundaries are likely to be most critical in a lower inertia NEM, there are a number of other aspects that should be considered for a full system security assessment11 (see also Appendix, Section 8), especially in systems with high proportion of renewables, which were out of the scope of this work.
These include issues such as: rotor angle stability (transient stability, inter-area oscillations, etc., which might be exacerbated while inertia varies in both time and space across regions with different VRE types, installed capacities, and outputs); voltage stability and reactive power support (and in particular to guarantee certain dynamic performance of asynchronously connected VRE sources); availability of sufficient short-circuit strength from all generating units or other resources (e.g., synchronous condensers) for adequate activation of protection systems12; supply adequacy to guarantee that there are sufficient resources (including assessment of the “capacity value” of renewables and of “energy” availability from hydro-resources) in the system to meet the peak demand; and so forth. All these issues could change the actual synchronous generation output requirements, for which further specific dynamic and geographically detailed studies are required.
Further aspects to be considered may also include additional frequency control requirements (e.g., for regulation) as well as new balancing and reserve requirements (e.g., for ramping flexibility) (see also Section 5.3) to deal with larger uncertainty and variability due to VRE output.
11 This is also discussed in AEMO's Advice on the Integration of Energy and Climate Policy, which is an addendum to the 2016 AEMC report titled Integration of energy and emissions reduction policy.
12 Asynchronously connected plants that rely on power electronics interface do typically provide limited contribution to fault currents.

26
3. Methodology for frequency response security assessment
3.1. Methodology for security assessment
3.1.1. General approach
The fundamental research question to assess frequency response adequacy given a certain portfolio of resources can be formulated as:
“Is a given portfolio of resources able to provide a stable frequency response following any contingency (such as loss of a generator or interconnector) under any system incumbent condition (of demand, VRE and inertia, in particular)?”
In order to address this question, and based on the above considerations, two sets of studies have been performed to assess the security of the system dispatch with the resources available from the results of the modelling scenarios provided, considering first principles of dynamic system response:
1. “Unconstrained Nadir” case: this is the base case whereby schedule of FCAS contingency services is formulated in line with current “static” requirements.
2. “Constrained Nadir” case: the schedule of FCAS contingency services is in this case formulated as from a new set of requirements that are dynamically quantified taking into account the time-changing system environment and new operational constraints13, namely:
a) Maximum allowed ROCOF; b) Minimum allowed Frequency Nadir; c) Minimum allowed QSSF14 in correspondence of the reference frequency
values as from the current static requirements.
3.1.2. “Unconstrained” frequency Nadir case (base case)
In this case, a conventional reserve-constrained optimal power flow (OPF) analysis is performed for every relevant snapshot where energy output and static FCAS reserve requirements are co-optimised in a least-cost fashion subject to generation constraints15 and interconnector flow constraints16.
13 The modelling of the new constraints has been developed from first principles, based on a suitable approximation of the solution of the system frequency response dynamic equations.
14 Requirements on QSSF are usually adopted to guarantee that the frequency is not at dangerously low levels for too long, e.g., up to a few minutes (in case a new event were to happen), and to allow successive control schemes (such as secondary frequency response and further reserves that could also be manually activated by the system operator) to bring back the frequency to secure pre-contingency levels.
15 Such as minimum stable generation, maximum operational capacity, transient and nominal ramp rates, available headroom vs frequency response provision functions, etc.

27
The FCAS schedule corresponds to the current static frequency response requirements for 6s, 60s and 5 minute services, which, as aforementioned, are a function of the largest credible contingency and the incumbent demand level at every dispatch interval. Therefore, in this “base case”, there is no explicit consideration for frequency Nadir and ROCOF constraint, and inertia is not explicitly modelled or captured.
After running the OPF according to the current FCAS requirements, the three frequency response adequacy metrics mentioned above, namely, ROCOF, Frequency Nadir and QSSF are checked for compliance with the predefined limits. The relevant inertia level yielded as a “by-product” of the dispatch is also recorded.
3.1.3. “Constrained” frequency Nadir case
Frequency Response Security Constrained Optimal Power Flow (FRSC-OPF)
A bespoke operational optimization model was developed so as to be able to run a Frequency Response Security Constrained Optimal Power Flow (FRSC-OPF) that is representative of possible operational strategies and algorithms that could be implemented in the system dispatch engine in consideration of lower inertia scenarios. The model is based on the same OPF tool used for the “unconstrained” frequency Nadir case above, but also explicitly accounts for ROCOF and frequency Nadir constraints in addition to the static FCAS constraints.
Dynamic calculation of FCAS requirements and co-optimization of FCAS and inertia
In the proposed FRSC-OPF, at every considered dispatch interval FCAS requirements are dynamically calculated and co-optimised with the appropriate level of system inertia17 from synchronous machines18 so as to satisfy all static, ROCOF and frequency Nadir constraints (as well as of course the required energy output).
The algorithm thus yields, for each dispatched unit, the operational setpoints (corresponding to the energy output to satisfy the net demand), the amount of scheduled FCAS (6s, 60s, and 5min) and the headroom required to deal with the relevant ramp rate limits, and the overall online capacity that corresponds to the required inertia in the system so that all the above frequency response constraints are satisfied.
16 A DC power flow model is assumed, for the sake of simplicity and given that the interaction with reactive power flows and voltage control can be at first approximation neglected in the problem under analysis and considering the planning nature of the study.
17 Effectively, since inertia can be seen as another (instantaneous) form of frequency response provided by synchronous kinetic energy, as mentioned earlier, the FRSC-OPF performs a co-optimization of all frequency response services and resources available in the system.
18 Primarily synchronous generators, which also provide FCAS, but they could also be the likes of synchronous condensers or loads (e.g., pumped-hydro operating in pumping mode).

28
As in low inertia systems the speed of response (and effectively the magnitude and extent of the overall system ramp) may have to increase significantly, it is expected that faster PFR will be required alongside the co-optimised level of inertia. To allow easy comparison with the current requirements, the PFR level scheduled from the FRSC-OPF is then also calculated in correspondence of 6 seconds19. In fact, the fast FCAS requirement is effectively replaced by the frequency Nadir constraint when these become active (“binding”), whilst enabling frequency Nadir and ROCOF constraints does not modify the slow (60s) and delayed (5min) FCAS static requirements.
It is also worth pointing out that in those cases when the ROCOF and frequency Nadir constraints are not binding, the FRSC-OPF algorithm would schedule the same resources as in the “unconstrained” case, meaning that the only actual binding requirements are the static ones.
3.1.4. Generation/demand combination snapshots considered in the analysis
For each scenario and year, a number of snapshots corresponding to a number of plausible combinations of demand and generation outputs have been considered. In particular, we looked into various possible outputs from VRE (e.g., high wind-zero solar during the night, low wind-low solar or high wind-high solar during the day, etc.) that could drive dispatch with less inertia in the system20, as well as two extreme demand conditions, namely, maximum and minimum demand.
Times of minimum demand are of particular interest for system security assessment for a few reasons, namely:
- It is more likely that the relative share of VRE covering demand is higher and therefore the overall synchronous inertia in the system lower;
- There may as well be fewer online synchronous generators available to provide inertia and reserves21;
- The load relief is proportional to the incumbent demand level, so at minimum demand the “relief” effect is also minimal.
However, especially for large amount of installed VRE capacity, situations may arise where VRE output could even cover the peak demand, and of course all intermediate situations too. Hence, systematic analysis has been carried out for a range of VRE outputs and both min and max demand levels.
19 However, as in a low inertia system the ROCOF can be much higher and the frequency Nadir can be much lower and happen much earlier, it may happen that generators will have to provide relevant output much before 6 seconds, even though the “official” scheduled PFR is calculated in correspondence of 6 seconds.
20 VRE has been assumed with priority dispatch. However, VRE output could be curtailed for security reasons.
21 Unless dispatched with specific inertia-dependent constraints.

29
3.1.5. Summary of the methodology for security assessment
A summary of the security assessment methodology is reported in Table 3.1, with indications of the relevant operational constraints, FCAS requirements and (additional) security requirements used in the “unconstrained” (base reserve-constrained OPF) and “frequency Nadir-constrained” (FRSC-OPF) cases as well as allocation to one of the two “classical” reserves used, namely, automatic primary frequency response PFR or secondary frequency response SFR.
Table 3.1: Constraints and reserves used in the security assessment methodology
Constraint Base OPF FRSC-OPF Response
Generating units’ operational limits Y Y
Interconnectors’ flow limits Y Y
FCAS reserve requirement @5min Y Y SFR
FCAS reserve requirement @60s Y Y PFR
FCAS reserve requirement @6s Y Y PFR
ROCOF constraint N Y Inertial
Nadir constraint N Y Inertial + PFR
3.2. Considerations on minimum synchronous inertia and interaction among inertial, primary and secondary frequency response
As discussed earlier, inertia is key to limit the ROCOF at the initial times following the event, when the kinetic energy from the spinning synchronous machines slows down the frequency change. Therefore, increasing the level of inertia in the system may be seen as a means to improve frequency response, at least in terms of slowing down the frequency drift through inertial response.
There is ongoing research into a minimum synchronous inertia or generation level or, equivalently, the maximum System Non-Synchronous Penetration (SNSP) allowed in the system, defined as a measure of the non-synchronous generation in the system at an instant in time as a percentage of the demand22.
However, increasing system inertia on its own (which can be obtained by committing more generators online and therefore providing an upper limit to the SNSP metric) may not be sufficient to guarantee an acceptable frequency Nadir level, for which also a suitable level of automatic PFR needs to be scheduled to stop and stabilise the frequency drift.
22 J. O’Sullivan, A. Rogers, D. Flynn, P. Smith, A. Mullane, and M. O’Malley, “Studying the Maximum Instantaneous Non-Synchronous Generation in an Island System—Frequency Stability Challenges in Ireland”, IEEE Trans. on Power Systems, Vol. 29, No. 6,Nov 2014, pp. 2943-2951.

30
Furthermore, the synchronous generation output is only a proxy of the actual level of system inertia, which is associated to the online capacity23 of a synchronous unit rather than its current output. For example, assuming a power factor equal to one and a same inertia constant (e.g., 5MWs/MVA) for different units of a same technology but with different size24, a synchronous generating unit of 500MW capacity operating at 250 MW output would contribute the same kinetic energy as two 250MW capacity units each producing their full output; however, the contribution of the two sets of generators to the SNSP index, calculated on the basis of their energy output, would be different.
The proposed FRSC-OPF effectively co-optimizes all the different frequency response options available in the resource portfolio, that is, by committing online synchronous units that can provide an adequate frequency response following a contingency, from very fast inertial response to PFR and SFR.
Therefore, as an output of the modelled FRSC-OPF, at every dispatch interval there is a specific value of minimum synchronous output (or maximum SNSP level) that is yielded alongside the corresponding inertia level (given by the spinning synchronous capacity) and the required levels of primary and secondary reserves to be scheduled to provide suitable frequency response. In other words, there is a complex interplay between actual energy output and inertial, primary and secondary reserves that need to be scheduled, and the FRSC-OPF optimizes this interaction.
23 The kinetic energy of a synchronous unit is in fact defined with respect to its MVA capacity.
24 In reality, for a given technology the inertia constant may slightly change with the size. However, this does not affect the generality of the discussion.

31
4. Scenario analysis
This Section presents main results from scenario analysis, providing first a comparative overview of the scenarios and key results, and then discussing more in detail the CET&LL scenario as an example and sensitivities around the main parameters used in the study.
4.1. Scenarios overview
4.1.1. The modelling scenarios
The five modelling scenarios are listed in Table 4.1, while a more detailed description is presented in the Appendix, Section 8.
An overview of the demand input data and technology investment resulting from the modelling is also provided below.
Table 4.1: Modelling scenarios and relevant emission targets
Scenario Target in 2030
Business as Usual (BAU) NA
Limited Lifetime (LL) No target
Clean Energy Target and Limited Lifetime (CET&LL)
28% below 2005’s level
Clean Energy Target (CET) 28% below 2005’s level
Emissions Intensity Scheme (EIS) 28% below 2005’s level
4.1.2. Input data from modelling scenarios
Electricity demand
A 50% probability-of-exceedance (POE) median peak demand is used for all scenarios. The minimum level and maximum level of electricity demand (which is the same for all scenarios) throughout the years up to 2050 is shown in Figure 4.1.

32
Figure 4.1: Range of electricity demand (min to max) for all scenarios to 2050
Installed capacity
The conventional and VRE installed capacity for the NEM varies in every scenario and year. Hydro installed capacity increases slightly in the period 2017-2025, but in general it is very similar in the years under analysis. In the following figures, it is possible to appreciate the amount of total installed capacity, thermal installed capacity and VRE installed capacity25.
Figure 4.2: Total installed capacity for all scenarios to 2050
25 CCGT: Combined Cycle Gas Turbine; OCGT: Open Cycle Gas Turbine; Solar is overall composed of Concentrated Solar Power (CSP) and solar Photovoltaic (PV); Hydro is composed of run-of-the-river, hydro with reservoirs, and pumped-hydro.

33
Figure 4.3: Thermal Synchronous installed capacity for all scenarios to 2050
Figure 4.4: Renewables installed capacity for all scenarios to 2050
In terms of synchronous inertia contribution, it is assumed that CCGT, coal, OCGT, hydro, biomass, and concentrated solar technologies are synchronously connected, while wind 26 and solar PV (as well as batteries) have nonsynchronous connection.
Both synchronous and non-synchronous installed capacity present similarities among some scenarios. This will lead to similar results when comparing different metrics for security among scenarios, which will be highlighted in the coming sections.
26 In reality, some older wind turbines might be based on synchronous machines, but their amount is negligible and it is envisaged that all new wind turbines will be non-synchronously connected through doubly-fed induction generators (DFIG) or full-converter interface.

34
4.2. Scenario results overview
This Section discusses the frequency Nadir, ROCOF, system inertia and Primary Frequency Response (PFR) requirements 27 considering a (worst case) generation contingency28 for all scenarios, with a demand frequency damping factor of 2%/Hz. Both cases when only the current static frequency response requirements are applied (but without explicit frequency Nadir and ROCOF constraints, nor any consideration for inertia), and then with also frequency Nadir constraint of 49.2Hz and ROCOF constraint of 1Hz/s as from the FRSC-OPF tool discussed above, are considered.
4.2.1. Nadir
If the frequency Nadir is not formally constrained in the system (Figure 4.5), the minimum level of frequency after contingency might naturally reach unacceptable levels in each scenario, especially in the farther future with more nonsynchronous VRE sources connected to the system.
Since the current synchronous capacity in the NEM is high and the amount of VRE is relatively low, the 2017 “unconstrained” case, when only static PFR requirements are applied, shows acceptable levels of frequency Nadir both for high and low demand.
In the following 10 to 15 years, however, this situation might change radically for minimum demand periods, mainly driven by the massive penetration of VRE for all scenarios except from the base scenario (BAU). During minimum demand periods, some extreme cases for frequency Nadir present an irregular evolution along the years, which depends on specific combinations of technologies under particular conditions, for instance, hydro capacity availability and must-run minimum synchronous output due to minimum stable generation constraints, among others.
On the other hand, during high demand periods the contribution of the natural frequency response provided by the load damping effect leads to minimum frequency Nadir levels that are within more acceptable limits (in the order of 49Hz).
27 PFR requirements are based on static requirements (response capacity sufficient to meet the current 6s and 60s FCAS requirements in correspondence of 49.5Hz), as well as on frequency Nadir and ROCOF constraints in the cases when these are applied (response capacity and online synchronous machines sufficient to meet the frequency Nadir and ROCOF constraints in addition to static requirements that always apply). Secondary Frequency Response (SFR) requirements, corresponding to the current 5 minutes contingency FCAS requirements, do always apply too.
28 Assumed equal to 700MW.

35
Figure 4.5: Nadir level after contingency without constraints for all scenarios, with demand frequency damping factor of 2%/Hz
If Nadir is formally constrained (alongside the ROCOF) in the dispatch, in this case to 49.2 Hz (Figure 4.6), the units are dispatched by the FRSC-OPF in a way that prevents the system’s Nadir to depart from that level, given the maximum contingency level. It is possible to check consistency among constrained and unconstrained cases by comparing the Nadir limits where the Nadir constraint is not active.
Figure 4.6: Nadir level after contingency with nadir constraint of 49.2 Hz for all scenarios, with demand frequency damping factor of 2%/Hz
4.2.2. ROCOF
The rate of change of frequency immediately after the contingency is a direct measure of the ratio between the size of the contingency and the aggregated system inertia (after the potential inertia loss due to the contingency itself). As it

36
can be appreciated in Figure 4.7, at the level of the whole NEM out of the whole range of possible combinations of demand and VRE outputs, there are only a few cases, starting from 2030, where ROCOF exceeds the limit of -1 Hz/s. These cases occur during periods of maximum demand in which the output of renewable sources is very high and the system inertia rather low too. In general, the worst level of ROCOF increases by year; this is due to the decrease of installed synchronous capacity and the associated available synchronous inertia along with the increase of renewables capacity that might be dispatched in the system at time of high demand and high availability of VRE output.
Figure 4.7: ROCOF after contingency without constraints for all scenarios, with demand frequency damping factor of 2%/Hz
When running the system dispatch with ROCOF (limited to -1Hz/s) and Nadir (limited to 49.2 Hz) constraints, the worst case that is obtained for ROCOF is close to -0.6 Hz/s (Figure 4.8). The reason for this level of ROCOF to be quite lower than its actual imposed limit is the fact that it is the Nadir constraint that determines the frequency response requirements at the whole NEM level. In particular, the co-optimization of all frequency response services and inertia to meet the Nadir constraint leads to the scheduling of a number of synchronous generating units whose equivalent inertia is higher than what would be required to meet the ROCOF limit of -1Hz/s. This applies in both maximum and minimum demand conditions, suggesting that, in other words, the 1Hz/s ROCOF constraint is inactive in all scenarios for all levels of demand due to the higher requirements that the Nadir constraint imposes on the frequency response security constraint dispatch.

37
Figure 4.8: ROCOF after contingency with nadir constraint of 49.2 Hz for all scenarios, with demand frequency damping factor of 2%/Hz
4.2.3. Inertia
The results for the inertia level that is scheduled in the system when no ROCOF and Nadir constraints are applied are somehow inversely proportional to the previous results for ROCOF (Figure 4.9). In fact, since the value of the largest considered contingency size is constant in all scenarios and years, all the results for ROCOF and inertia are directly comparable. The average level of system inertia in the considered VRE output/demand combinations is lower for the low demand level, which is an intuitive result given the lower output requirements from synchronous generators in that condition. The relevant inertia level for minimum demand also slightly decreases with time, corresponding to larger output availability from VRE. At the same time, the range of inertia levels that are seen for minimum demand gets significantly larger, again due to an increase in the potential range of VRE output while more renewables are installed in the system. Similar trends of decreasing average level and increasing range of operating synchronous inertia can also be appreciated, in an even more evident way, for the maximum demand conditions. In particular, it is interesting to notice that in the farther future, when VRE output could be plentiful in most cases so as to cover significant shares of both maximum and minimum demand, the inertia levels and ranges for the two demand conditions become much closer and more similar.

38
Figure 4.9: System inertia after contingency without constraints for all scenarios, with demand frequency damping factor of 2%/Hz
The amount of system inertia that is scheduled by the FRSC-OPF with constrained Nadir and ROCOF (Figure 4.10) shows, for the maximum level of inertia for both maximum and minimum demand, a trend that is very similar to the unconstrained case. However, the minimum inertia level for both demand conditions increases when compared with the unconstrained case, and particularly for minimum demand. This clearly shows the effect of the imposed minimum allowed Nadir requirement, which leads to the commitment of more synchronous generating units to increase the system inertia (as well as the PFR provided by generators) to be able to meet the frequency response constraint. Further, the effect of increased system kinetic energy is more evident for minimum demand, as under this condition the frequency response support from load relief is lower and therefore the system needs to schedule more FCAS and synchronous inertial response to maintain frequency response adequacy.

39
Figure 4.10: System inertia after contingency with nadir constraint of 49.2 Hz for all scenarios, with demand frequency damping factor of 2%/Hz
4.2.4. PFR
The minimum PFR allocation that is scheduled when only the current static 6s and 60s FCAS requirements are applied are limited to the quasi steady-state frequency target and diminishes in time (Figure 4.11). This is driven by an increase in both maximum demand and minimum demand levels throughout the years, which increases the contribution of the load relief and therefore decreases the PFR static requirements.
As the load relief contribution is directly proportional to the demand level, it can also be clearly seen that PFR requirements are higher for minimum demand. Further, as demand levels are the same throughout the scenarios, there is no change in the minimum PFR requirements (and actual allocation) for the different scenarios.
However, the maximum level of PFR in some cases is higher than the minimum static requirement. This is explained by the technical characteristics of the set of units providing the response and the assumptions on their operation during the energy-FCAS dispatch, which can lead to an allocation of slightly more PFR than the minimum requirement.

40
Figure 4.11: Primary frequency response requirements after contingency without constraints for all scenarios, with demand frequency damping factor of 2%/Hz
When Nadir and ROCOF constraints are in place (Figure 4.12), in some cases the amount of PFR increases well above the static PFR requirements due to the need for meeting the Nadir constraint, particularly if the system is running with relatively low levels of inertia. Once again, the amount of PFR and inertia that are provided by online synchronous generators are optimally co-optimised and allocated by the FRSC-OPF tool.
Figure 4.12: Primary frequency response requirements after contingency with nadir constraint of 49.2 Hz for all scenarios, with demand frequency damping factor of 2%/Hz
4.3. Analysis of specific results for CET&LL scenario
In this Section, the CET&LL scenario is analysed in more detail in terms of Nadir, ROCOF and synchronous inertia results, focusing in particular on the effect of different load damping factors and more stringent ROCOF constraints.

41
4.3.1. Nadir assessment for different damping factors
When it comes to analyse the results for frequency Nadir in any scenario, the Nadir-constrained and -unconstrained cases show clearly the differences in terms of system response after contingency, as it was presented in the previous Section. The new element presented in the following picture is thus the effect of the load relief associated to different demand damping factors.
In particular, the results from the unconstrained case with only static requirements clearly show the relieving effect of demand on the Nadir level after contingency, which is much higher for 3%/Hz as opposed to 1%/Hz and for maximum demand as opposed to minimum demand, as the load relief effect is directly proportional to the demand level. This is particularly evident for the 1%/Hz and minimum demand case, whereby, due to both lower damping factor and lower demand, the frequency Nadir could potentially plunge to very low levels following the worst case contingency, and especially for farther scenarios with potentially much larger shares of VRE outputs.
Figure 4.13: Nadir level after contingency without constraints and with nadir constraint of 49.2 Hz (CET&LL)
4.3.2. ROCOF assessment for different damping factors
The rate of change of frequency also varies depending on the level of relief coming from demand. However, in this case a higher load damping leads to worse ROCOF levels in the case when no formal Nadir constraint is applied. This behaviour results from the fact that, in order to meet the static FCAS requirements, the system needs fewer online synchronous units and therefore schedules less inertia. This in turn means that higher ROCOF could occur. For the Nadir-constrained case, as mentioned earlier the Nadir constraint is normally more binding than ROCOF, and therefore the allocation of resources to limit Nadir will also automatically limit the ROCOF. However, there may also be cases for which the ROCOF constraint could become active to limit it to a maximum of 1Hz/s. This applies, in particular, for higher damping factor and maximum

42
demand level in future years, where the overall load relief effect (which is proportional to both the demand level and the damping factor) would be such that the number of synchronous units scheduled to provide an adequate Nadir response might not bear sufficient inertia to also constrain the ROCOF to the defined limit. However, as mentioned above, it is more likely that in the future a damping factor lower than the 3%/Hz currently used would apply.
Figure 4.14: ROCOF after contingency without constraints and with nadir constraint of 49.2 Hz (CET&LL)
4.3.3. Inertia assessment for different damping factors
Inertia allocation in the system exhibits a behaviour that is in line with the previous ROCOF analysis. For higher relief (coming from either the damping factor of demand or the demand level or both) the system generally tends to commit fewer synchronous generating units, which has a direct impact on synchronous inertia. For the Nadir-constrained case, in particular, it can be appreciated how the minimum after-contingency system inertia that is allowed in the system goes systematically up. This is particularly evident in the 1%/Hz damping factor case, where, as the load relief effect is less, more online synchronous units are required to provide inertial response and the other FCAS. Also, in those cases where ROCOF constraint is active (high demand, damping factor 3%/Hz, years 2035-2050), it is possible to see that the inertia level is limited to 17.5GWs, which corresponds to the largest credible contingency of 699.32 MW and the ROCOF limit of -1 Hz/s.

43
Figure 4.15: System inertia after contingency without constraints and with nadir constraint of 49.2 Hz (CET&LL)
4.3.4. Impact of different ROCOF limits
This Section shows the impact on Nadir and ROCOF from constraining the system operation with different levels of ROCOF limits, namely, the base case of -1Hz/s as well as -0.5Hz/s, with a demand frequency damping factor of 2%/Hz.
In Figure 4.16 it can be appreciated that the Nadir constraint of 49.2Hz is always active, so that the system schedules an adequate and appropriate amount of inertia and FCAS to meet the Nadir target for both ROCOF limit cases.
On the other hand, Figure 4.17 shows the ranges of ROCOF levels for both maximum and minimum demand for both the unconstrained case as well as the cases whereby the Nadir is constrained to 49.2 Hz and the ROCOF constrained to -1 and -0.5 Hz/s.
From comparison of the two figures, it can be seen how for the case with ROCOF limited to -1 Hz/s the Nadir constraint is driving the synchronous inertia level to an extent that the ROCOF level does not activate; in other words, more online synchronous units are needed in the system to provide suitable frequency response to meet the minimum allowed Nadir requirement than to meet the maximum ROCOF requirement.
In contrast, for the case with a ROCOF limit of -0.5 Hz, there are situations in the farther years (2035-2050) where the ROCOF constraint becomes active for maximum demand. As also the Nadir constraint activation occurs for the same situations, the joint analysis of the results indicate that the FRSC-OPF algorithm optimally schedules the online synchronous units so as to provide the appropriate amount of inertial response and FCAS so as to limit the minimum frequency Nadir while also limiting the maximum ROCOF at the desired levels.

44
Figure 4.16: Nadir level after contingency with different ROCOF constraints, with demand frequency damping factor of 2%/Hz (CET&LL)
Figure 4.17: ROCOF after contingency with different ROCOF constraints, with demand frequency damping factor of 2%/Hz (CET&LL)

45
5. Minimum synchronous generation analysis for CET&LL scenario
5.1. General considerations and methodology
The main purpose of this study was to analyse the concept of minimum synchronous generation to make the NEM secure and provide indication as to what this level would be in the CET&LL scenario.
As discussed earlier, there may be different approaches and indices that can be used to provide some constraint to system operation in terms of inertia, such as limiting the level of nonsynchronous generation operating in the system at any time. For example, this limit could be enforced through a mechanism that relies on the System Non-Synchronous Penetration (SNSP) index29. In Ireland, this mechanism currently applies a 55% limit on non-synchronous generation at any instant. This limit is to be increased to reach 75% in the future.
As the SNSP% limit is applied to variable system conditions, and particularly to variable levels of demand and renewables, the maximum amount of nonsynchronous generation output allowed in the system, measured in MW, actually varies in time.
Another potential approach could be to identify a minimum amount of synchronous generation that should always be in the system, for example in MW or in % of a demand reference (e.g., the peak demand or the actual demand at a given point in time).
However, all these approaches are only proxy of the actual requirements, since there is a tight interplay between inertial response and other frequency control mechanisms to provide adequate frequency response, and in particular what matters is the synchronous kinetic energy (inertial response) that is associated to the spinning capacity (not output) of the synchronous machines, as well as the schedule of the other FCAS that is associated with having a certain headroom to provide reserves.
The explicit co-optimization of all response services (including inertia) that can be carried out through the proposed FRSC-OPF is thus able to schedule for every system condition the right amount of each service, and in simple terms the actual synchronous and nonsynchronous generation outputs (that may be used to calculate the SNSP index or the likes) as well as the spinning capacity (which intrinsically bears system inertia, but also brings adequate headroom to provide the required FCAS).
29 http://www.eirgridgroup.com/site-files/library/EirGrid/OperationalConstraintsUpdateVersion1_47_December_2016.pdf

46
Based on the above considerations, two approaches have therefore been followed to assess a potential minimum level of synchronous generation:
- A static assessment of one conservative level of minimum synchronous generation level, in MW, to be always online in the system, for each year; this analysis has been carried out through the FRSC-OPF tool.
- A detailed dynamic assessment of a minimum synchronous generation level at every half-hour interval for the years 2020 and 2050; a bespoke frequency control security constrained unit commitment (FRSC-UC) has been used in this case, which also considers intertemporal constraints and flexibility reserves and could be more relevant in future years.
5.2. Static assessment of minimum synchronous generation level through FRSC-OPF
5.2.1. Methodology
The minimum level of synchronous generation (in MW) to be online at all times to maintain security has been determined by running the FRSC-OPF tool constraining the system to comply with both a maximum value of ROCOF (set equal to 1Hz/s) and a minimum frequency level (“nadir”), set equal to 49.2Hz, and considering a damping factor equal to 2%/Hz.
The same maximum contingency level equal to 700MW (largest generator, as from the modelling scenario results) has been considered in all studies.
For every year, we have performed analysis for both minimum and maximum demand and for different levels of renewables outputs (relative to their installed capacity in the specific year considered), as from the input data in the modelling scenarios as well as for extreme cases to stress test the system under credible situations.
This refers in particular to a condition with minimum level of demand and high output of wind (e.g., 90% of installed capacity). In fact, under these conditions, the low-demand load relief effect due to the damping parameter is fairly limited and therefore frequency response is more challenged, as already discussed.
5.2.2. MW value of minimum synchronous generation per year
The resulting requirements for minimum synchronous generation capacity (in MW, by year) that should always be online have been provided in Figure 5.1.
The plot was drawn under the assumption of one single MW figure for the minimum synchronous generation to be always online in the system. This corresponds to a worst-case condition, yielding a certain MW level that generally corresponds to a low demand/high renewable case30. This is also a generally
30 A wind output equal to 90% of its installed capacity has been considered.

47
conservative number and only a proxy of the actual requirements that change with the system condition, as discussed, and that could be fully captured through the dispatch results of the FRSC-OPF tool. However, such a number could be useful for instance for applications in long-term expansion tools as the one used to model generation investment in the scenarios analysed here, where the modalities to provide security constraint inputs may be limited.
From the picture, it can be appreciated how the minimum synchronous generation capacity decreases in different year and then tends to saturate from about 2035. In fact, in 2017 to 2030 the wind penetration is not yet substantial, and the synchronous capacity is needed for adequacy purposes too to cover the minimum demand. In contrast, from 2035 there is significant wind which increases up to 2050. However, no matter how much wind there is in the system, from 2035 the minimum synchronous generation level constraint becomes active in the system, and thus does not change significantly with time (minimum demand level is about constant throughout those years).
Figure 5.1: Minimum online synchronous generation capacity and generation output (calculated in a min demand/high VRE case) by year, with Nadir constraint of 49.2 Hz and load damping factor of 2%/Hz (CET&LL)
5.2.3. Comparison with the SNSP index
The SNSP index is calculated based on the actual VRE output relative to demand. Therefore, taking the 2050 case as reference, for a low demand level of about 17GW, 4GW of synchronous output corresponds to about 24% (i.e., SNSP=76%). This is aligned with the 75% limit that Ireland could consider as future target, even though one needs be careful to compare systems given the complexity of all the different parameters that interplay (size of the system, size of the contingency, demand level, load damping factor, etc.).

48
However, it also needs to be highlighted that under worst case conditions (min demand/high wind) a secure frequency response with synchronous generators providing 4GW output also needs to be accompanied by relevant provision of inertia and FCAS that require in total 8GW of output, which corresponds to about 48GWs of inertia and a spare capacity of around 4GW. Without information on the actual online synchronous capacity (which is the real physical inertia driver), the output per se does not provide sufficient information.
On the other hand, for high demand level in the order of 35GW, 4GW of synchronous output corresponds to about 12% (i.e., SNSP=88%). Once again, this per se does not provide sufficient information on the frequency response adequacy of the system and requires information on the actual spinning capacity. If the same 8GW of spinning capacity were assumed, it is very likely that the corresponding 48GWs of inertia could be overconservative in many cases. This can for example be seen from Figure 5.1, in which the absolute minimum system inertia level for maximum demand, while still meeting all frequency response constraints, is in the order of 25GWs. Similarly, 4GW of headroom would often be overconservative also in terms of provision of the required FCAS for the maximum demand case.
In summary, indicators that refer to relative levels of synchronous and nonsynchronous output need to be treated carefully, as the physical requirements of inertia (as kinetic energy) and interplay between different frequency response services (inertial response, primary and secondary) may not be properly acknowledged by such indicators.
5.3. Dynamic assessment of minimum synchronous generation levels through Frequency Response Security Constrained Unit Commitment (FRSC-UC)
5.3.1. Problem description and methodology
In this section, a detailed dynamic assessment of a minimum synchronous generation level at every half-hour interval for the years 2020 and 2050 is presented. The analysis is performed through a bespoke frequency control security constrained unit commitment (FRSC-UC) which is an adaptation of a flexibility assessment-oriented unit commitment model31 with inclusion of ROCOF and Nadir constraints. The model also considers intertemporal constraints and flexibility reserves and could be more relevant in future years
31 L. Zhang, T. Capuder and P. Mancarella, “Unified unit commitment formulation and fast multi-service LP model for flexibility evaluation in sustainable power systems”, IEEE Transactions on Sustainable Energy, vol. 7, no. 2, pp. 658-671, April 2016.
The Unit Commitment model includes all most relevant operational constraints and cost functions, such as minimum stable generation, maximum generating capacity, minimum up and down times, maximum transient and nominal ramp rates, part-load marginal cost functions, start-up costs, etc.

49
with significant amount of VRE output whose variability and uncertainty might pose substantial balancing challenges to the system.
The detailed analysis throughout a year aims at providing insights into the actual amount of time when specific FCAS requirements may be needed, and particularly in terms of having to activate ROCOF and Nadir constraints.
Furthermore, a techno-economic assessment of the potential costs and benefits from adopting certain operational strategies/technologies is provided For brevity, only the cases of 2020 (closer to today’s situation) and 2050 (closer to extreme cases in the future) for the CET&LL scenarios are considered.
For the purpose of assessing the implications of having additional security constraints relative to the current conditions, three cases are considered in each case study example:
- “Nadir-unconstrained”, which represents the base case, where the three 6s, 60s and 5 minutes FCAS static requirements are modelled.
- “Nadir-constrained” case, with both ROCOF and frequency Nadir constraints added to the static requirements of the base case, as for the FRSC-OPF.
- “Flexibility-constrained” case. In this case, additional reserve requirements are added to deal with expected very large penetration level of VRE, particularly to actively tackle its potentially large uncertainty and variability that might lead to insufficient ramping capacity of the system and consequently higher operational costs (if more standing reserves or load shedding where required) or even infeasible scheduling of the system32.
A summary of the constraints and requirements for FCAS and reserves is provided in Table 5.1.
32 Following (B. Kirby, E. Ela, M. Milligan, “Analysing the impact of variable energy resources on power system reserves”, in Renewable Energy Integration, Elsevier, 2014) a 3σ rule has been applied to consider variability of load, solar and wind in the 5-minutes timescale as well as forecast uncertainty for load, solar and wind in the one-hour timescale, with σ being the standard deviation of the relevant variability/forecast uncertainty functions, estimated from current information.

50
Table 5.1: Constraints used in different UC modelling approaches
“Nadir-unconstrained
“Nadir-constrained”
“Flexibility-constrained”
Static PFR @6s Y Y Y
Static PFR @60s Y Y Y
ROCOF constraint Y Y Y
Nadir constraint -> “dynamic” PFR N Y Y
FCAS @5min (secondary response) Y Y Y
FCAS @5min + variability reserve N N Y
one-hour ahead uncertainty reserve N N Y
5.3.2. Results
Impact of Nadir constraint
The first study performed is to understand the performance of the system with/without Nadir and ROCOF 33 constraints as well as considering the additional flexibility reserve. In general, very similar results can be found for the “Nadir-constrained” and “flexibility-constrained” cases.
The half-hourly duration curves of the system Nadir with/without Nadir constraint and with flexibility constraint in 2020 and 2050 are shown in Figure 5.2. From Figure 5.2, it can be seen that for 2020 the system frequency does not drop below 49.2Hz following a contingency, suggesting frequency response adequacy of the NEM in the next few years. However, if the Nadir constraint is not imposed by 2050, the Nadir can be lower than 49.2 Hz in some 40% of the time throughout the year, with a minimum value lower than 49 Hz.
It can be appreciated how the resulting Nadir values for all cases are higher than in the studies with FRSC-OPF. In fact, a unit commitment with inter-temporal constraint naturally “forces” more power plants to be online to minimise start-up and shut-down costs and abide by minimum up and down time constraints, so that more inertia is automatically scheduled in the system, resulting in improved frequency response performance.
In this respect, the duration curves of system kinetic energy for the different cases are depicted in Figure 5.3. It can be noticed that the range of kinetic energy is between 70GWs to 167GWs in 2020. In 2050, the minimum level of the kinetic energy could instead drop to as low as 29 GWs without Nadir constraint, while this minimum level increases to 34GWs when the constraint is activated, as more
33 However, the 1Hz/s ROCOF constraint is basically never active, that is why the focus is put on analysing the frequency Nadir results.

51
generators are needed online to provide extra inertial response and PFR (as well as the flexibility reserve). It is also evident how the Nadir constraint activates additional inertia in the system for again about 40% of the time.
The duration curves of the system PFR are then plotted in Figure 5.4. Same as above, there is no difference between Nadir-constrained and Nadir-unconstrained cases in the 2020 scenario; this is because the minimum value of Nadir is above 49.2Hz also in the unconstrained scenario based on the PFR yielded by the static FCAS requirements. However, in order to maintain the Nadir above 49.2Hz, in 2050 the maximum level of PFR needs to increase from 550 MW to 850 MW due to the lower system kinetic energy and a substantial increase can be generally noticed.
Figure 5.2: Frequency Nadir duration curve

52
Figure 5.3: System kinetic energy (“inertia”) duration curve
Figure 5.4. PFR requirement duration curve

53
In order to demonstrate further the relation between system kinetic energy and PFR requirements, their half-hourly time series profiles in two consecutive days are shown in the top picture of Figure 5.5, while the corresponding renewable generation profile and system net demand are depicted in the bottom picture. It can be seen how the PFR requirement and inertia are highly correlated, with PFR higher when the system has a lower inertia and vice versa. Furthermore, lower inertia is coincident with periods of high renewable generation and lower net demand.
Figure 5.5: Example of PFR requirement and system kinetic energy profiles (top) and corresponding system net demand and renewable generation profiles (bottom), for a typical day in the “Nadir-constrained” scenario in 2050

54
System parameters sensitivity studies and cost implications
In this section we analyse the cost implication of different operational settings as sensitivity studies (for load damping factor and Nadir limit), whose results for 2050 are synthetically depicted in the “tornado plot” of Figure 5.6. The reference case for the cost assessment is taken as the Nadir-unconstrained and 2%/Hz load damping.
First of all, it can be appreciated how the frequency Nadir constraints, that are active some 40% of the time, only add some 2.8% of costs, while adding further reserve constraints for flexibility brings about some additional 1% of costs, relative to the base case when these constraints do not apply.
If the system damping rate decreases from 2%/Hz to 1%/Hz, the operating cost increases by some 3% even without Nadir constraint, as more frequency response capability needs to be procured if less load relief can support the system frequency after the contingency. The increase in cost reaches up to 8.5% when the flexibility constraints are added. However, the cost difference is relatively small between Nadir-constrained and flexibility-constrained cases. This is because the Nadir constraint with 1%/Hz damping factor requires more generators online for inertia purposes, which can also provide the reserve required in flexibility constrained scenario. When the load damping increases to 3%/Hz, the operational costs of the three scenarios are reduced by 2.2% (Nadir-unconstrained case), 4.6% (Nadir-constrained case) and 1% (flexibility-constrained case), respectively, relative to their corresponding scenarios in the reference case.
For the sensitivity studies on Nadir allowed limit, it can be noticed that increasing the frequency Nadir limit to 49.5Hz leads to a substantial additional 11.5% system operational cost for both Nadir-constrained and flexibility-constrained case, as more synchronous generators need to be committed online for inertia purposes and more PFR needs to be procured, at the cost of VRE curtailment with zero marginal cost. However, if the Nadir allowance is lowered to 49 Hz, there is no extra operational cost, as the lowest Nadir in the unconstrained scenario is 49 Hz, as from Figure 5.2. Consequently, relaxing the Nadir allowance to 48.5 Hz brings no extra benefits relative to the cost of the scenario with 49 Hz limit. Finally, when analysing the system operational cost with 49.5Hz Nadir and 1%/Hz damping, the annual system operation costs can increase by up to 17%.
These results indicate that the inclusion of the proposed additional operational constraints allows the secure integration of VRE generation at moderate system cost increases, with the same overall mix of generating technologies. Although the cost increases are moderate, the results also suggest that further work may be useful to assess how these constraints affect the revenues to each generating plant. Finally, it may be useful to re-optimise the mix of generating technologies, so that these additional costs and revenue impacts can be included.

55
Figure 5.6. “Tornado plot” of system annual operational cost changes (relative to the base “Nadir-unconstrained” case in 2050)
5.3.3. Assessment of the system non-synchronous penetration (SNSP)
Further to the above FRSC-UC studies, in this Section we also perform an analysis of the SNSP level for the CET&LL scenario, with the aim of getting further insights in this index.
Figure 5.7 shows the SNSP% duration curve for the years 2020 and 2050 for the base case (damping factor 2%/Hz and Nadir limit 49.2Hz) and for the different unconstrained and constrained cases. From the results, it can be appreciated how the Nadir and flexibility constraints are basically never active in 2020, and the maximum SNSP is in order of 60%, causing no issue.
For 2050, first of all the penetration level increases significantly due to the rise of VRE in the scenario, and it can be appreciated that the maximum SNSP is significant, in the order of 90%. This is in line with our previous analysis in Section 5.2, indicating that a fairly high SNSP could potentially be obtained depending on the system conditions, and that a fixed % limit to be applied at any time might not be straightforward to impose (although it would be a better option than a fixed, static value in MW).
There is no significant difference between the cases, even though it is noticeable that for some 35% of the time Nadir and flexibility constraints bring down the SNSP by some 5% to allow secure operation, which is obtained by operating more synchronous generation at the cost of curtailing some VRE output. With the more stringent flexibility constraints, in particular, the SNSP could still reach up to some 87%.

56
Figure 5.7: System non-synchronous penetration level duration curve for CET&LL scenario (2%/Hz damping rate, 49.2Hz Nadir)

57
6. Role of new and alternative technologies and services
6.1. More than synchronous generators
While inertia and PFR from synchronous generators are key to deliver an adequate frequency response, there are other ways to influence the system response, particularly in the timeframe of the inertial response. This can be basically done by either adding external sources of inertia that can contribute to the synchronous kinetic energy (for example, synchronous condensers that do not produce active power as generators but still provide natural, automatic inertial response following a contingency; or pumped-hydro plants operating in pumping mode) or through very fast injection of energy into the system in the inertial response timescale of a few seconds, that is, before governor-driven PFR from conventional units can respond.
The latter options are associated with the so-called Fast Frequency Response (FFR), which in some cases is also named synthetic inertia or virtual inertia as it corresponds to very fast energy injection (usually through power electronics) as kinetic energy would naturally do.
A high level techno-economic assessment of some of these options for selected cases is provided below. It is important to note that this Section only considers the change in operating costs, and does not consider the construction and other establishment costs of these alternatives technologies. When assessing these new technologies, the overall impact on system costs and benefits should be fully considered.
6.2. Synchronous condensers
While various synchronous generators are expected to retire, some of these could be utilised as synchronous condensers to maintain certain levels of inertia in the system and at the same time potentially provide other services such as reactive power and voltage support and short circuit capacity.
In this Section, we have thus performed an assessment of the potential benefits from adding synchronous condensers equivalent to 5 GWs of kinetic energy considering the CET&LL scenario in 2050 (with base case 2%/Hz load damping and 49.2Hz Nadir limit), and using the FRSC-UC model introduced in Section 5.3. Based on the simulation results, the annual operational cost reduction is in the order 0.5% in the Nadir-constrained scenario relative to the case without synchronous condensers, resulting from higher inertia and lower PFR requirements.
This can be appreciated further from the duration curves of system kinetic energy and PFR requirement depicted in Figure 6.1 and Figure 6.2, respectively. It can be noticed that the system inertia increases overall, as expected, but with

58
the difference in inertia between the two cases becoming smaller in the low kinetic energy range. This suggests that fewer synchronous generating units are committed when inertia is lower, which should bring system benefits. This is confirmed by the duration plot of the PFR requirement, which can be reduced for some 35% of the time (when PFR requirements are driven by the Nadir constraint rather than the static requirements, so that having higher inertia helps the system response overall) and by up to some 70 MW.
Figure 6.1: System kinetic energy in base and synchronous condenser cases (49.2Hz nadir-constrained case, damping factor 2%/Hz, CET&LL 2050 scenario)
Figure 6.2: PFR requirement in base and synchronous condenser cases (49.2Hz nadir-constrained case, damping factor 2%/Hz, CET&LL 2050 scenario)

59
These results thus suggest that synchronous condensers may have larger benefits during the lower inertia periods (some 35% of the time, in the studies carried out here), which could provide indications as to whether they might be run (if for frequency support purposes rather than reactive power support or short circuit capacity contribution).
It is also likely that the benefits in the future might actually be higher, if assuming an increase in load damping factor which challenges frequency response more. In this respect, simulations with 1%/Hz load damping rate indicate that the annual operating cost savings for 2050 could be about double than in the 2%/Hz base case.
6.3. Fast Frequency Response
6.3.1. Fast Frequency Response (FFR) and Synthetic/Virtual Inertia
There are different potential sources of FFR, among which it is possible to cite:
- Storage devices, such as batteries, supercapacitors and flywheels: these have response timescales in the region of a few tens of milliseconds.
- PV: this may require pre-curtailing of energy output to create headroom for FFR that is then injected in the system through inverter control, and with response timescales in the region of several tens of milliseconds.
- Wind plant connected to the grid through DFIG or full converters: the kinetic energy physically embedded in the turbine blades may in this case be extracted through the power electronic converter control system, which would not require any energy output pre-curtailment as it would come, as for synchronous generators, at the cost of slowing down the machine; however, consideration for energy recovery that is needed to re-establish the turbine speed is also required. The response time is in the order of several tens of milliseconds.
- Demand response through fast load disconnection: this can typically be obtained with response times in the regions of several tens to few hundreds of milliseconds by disconnecting different types of loads, especially if equipped with intrinsic storage (for example, air conditioning systems that can exploit the thermal inertia of building fabric) or with very fast control (for example, electrolyzers for production of hydrogen).
- Static Compensators (STATCOM) and High Voltage DC (HVDC) links that have the possibility to provide very fast response within a few tens of milliseconds.
It is worth pointing out that in most cases FFR might only have to be required for a few to several seconds and up to a few minutes, so that the “energy” impact might not be substantial (especially in the case of load disconnection).
6.3.2. Some numerical results
In this Section, we present an example study based on the CET&LL 2050 scenario (base case with Nadir limit of 49.2Hz and damping factor of 2%/Hz) to assess the

60
benefits and performance of FFR for the system. The study was carried out with the FRSC-UC tool and performed with half-hourly resolution for one year.
More specifically, three different technologies are simulated to provide two different levels of FFR (100MW and 200MW) in order to limit the frequency Nadir and reduce the PFR provision requirement of conventional generators. These technologies are battery storage and flywheels, with response times (including detection out of the normal frequency deadband, signalling and full activation) assumed in the order of 150ms, as well as demand response (modelled as fast load disconnection) with response time in the order of 500ms.
The relative annual operational cost comparison is shown in the “tornado plot” of Figure 6.3 for the same cases simulated in Section 5.3.
In the Nadir-constrained case, 100MW FFR can lead to a range of 1.5% to 2% cost reduction, while 200MW FFR can substantially reduce the system operational cost by 5.5% relative to the base case. However, the cost reduction of FFR application is much less in the flexibility-constrained cases, which is only 1.1% even with 200MW FFR. This is because flexibility constraints enforce more generators online in any case to provide spinning reserve, which brings along more inertia and ability to provide PFR too.
Interestingly, it can also be noted that faster FFR does not bring substantial cost reduction, as all three technologies show a similar cost reduction range for a same FFR level. However, of course from a security perspective it may be desirable to have in place faster technologies, for example if FFR could be used to help in situation of islanding risk of some NEM region. Also, further initial studies suggest that there might be higher value in adopting faster technologies if the load damping factor were to decrease, as the frequency response requirements would become more challenging.
The duration curves of system kinetic energy and PFR requirement for conventional generators are also shown in Figure 6.4 and Figure 6.5, respectively. It can be noticed that the minimum value of system kinetic energy is reduced with extra FFR provision. More specifically, the minimum secure level of kinetic energy is now as low as 17.5 GW.s in the case with 200MW FFR from battery: this minimum inertia level is actually triggered by an activation of the ROCOF limit, otherwise even lower inertia might in principle have been reached. The maximum PFR requirement for conventional generators also substantially decreases from 820 MW to 520 MW with 200MW FFR provision from battery.
However, it is important to highlight that, especially for the lower levels of inertia considered, the results provided here are only indicative of the potential system benefits and full dynamic simulations should be carried out to assess the frequency response performance of the system when multiple technologies and services interacts, including detailed control schemes for the activation of FFR and so forth. As noted above, it is also important to consider the construction and other costs of these alternative technologies when evaluating their overall techno-economic performance.

61
Figure 6.3: Relative cost comparison of various FFR applications (49.2Hz nadir-constrained case, damping factor 2%/Hz, CET&LL 2050 scenario)
Figure 6.4: System kinetic energy duration curves in base and FFR cases (49.2Hz nadir-constrained case, damping factor 2%/Hz, CET&LL 2050 scenario)

62
Figure 6.5: PFR provision requirement duration curve for conventional generators in base and FFR cases (49.2Hz nadir-constrained case, damping factor 2%/Hz, CET&LL 2050 scenario)
6.4. Dynamic contingency rescheduling and regional security analysis
6.4.1. Dealing with transmission contingencies
A tool such as the FRSC-OPF used for the NEM-level studies can be extended to deal with transmission and interconnector contingencies that can put a region at risk of islanding, as well as to islanded region themselves. Such contingencies might be extremely severe, as for example experienced in the September 2016 South Australia blackout, due to the intrinsically low level of inertia relative to the contingency size.
Under some specific operating conditions, the loss of an interconnector should therefore be included in the security constrained dispatch of the system. An example of this operation condition could be the maintenance of one circuit of a double-circuit interconnector and the subsequent loss of the available circuit. Loss of a full interconnector could also happen in specific cases, whereby a normally non-credible contingency such as the loss of both Heywood circuits while operating could be reclassified as credible, In such a situation, the system could then be made more resilient to extreme events.
To deal with transmission contingencies, a further operational measure was then incorporated in the FRSC-OPF tool, namely, dynamic “contingency size rescheduling”, which helps alleviating the potential security issues.
6.4.2. Example of transmission contingency analysis for South Australia
To exemplify the effect of a transmission contingency, let us focus on the loss of the Heywood AC interconnector between VIC and SA in 2030, CET scenario.

63
Assuming that only one circuit is operating, its original secure maximum transfer capacity is halved from 650 MW to 325 MW. The scenario under analysis considers high demand and medium level of VRE (40% Wind, 10% Solar), so that there is transfer from VIC to SA. The frequency parameters used for the analysis are a demand damping of 2%/Hz and a minimum allowed frequency nadir of 49Hz34.
Base FRSC-OPF with NEM-level constraints
Under these conditions, the transfers in the system, not considering the occurrence of the potential transmission contingency, as yielded by our FRSC-OPF algorithm are presented in Figure 6.6. As in the main studies carried out above, the system’s FCAS have been scheduled to withstand the potential 700MW loss of Kogan Creek in QLD. The resulting transfer through the available circuit of the Heywood Interconnector is 313.4 MW. However, under these dispatch conditions, if the Heywood circuit were lost, the FCAS reserves available in SA would not be sufficient to prevent the frequency from dropping below 49Hz and so UFLS or another measure would be needed.
Figure 6.6: Pre-contingency system operation status considering the Heywood Interconnector has only one available circuit (max. transfer capacity equal to 50%). For each region, the demand level is presented in brown, generation level in blue and transmission flows between adjacent states in green (with the Heywood ones in red)
34 A relaxed frequency Nadir of 49Hz is assumed in this case, which might potentially activate some UFLS, provided that no resetting is carried out in the future.
G
2108.04 MW
1669.64 MW
G
12442.3 MW
13013.2 MW
G
9115.91 MW
9223.65 MW
G
2387.22 MW
1757.22 MW
107.7 MW 678.7 MW
125.0 MW
313.4 MW
8405.05 MW
7917.96 MW
G

64
Dynamic “contingency size rescheduling”
A further iteration of the FRSC-OPF can be carried out to reschedule the FCAS reserves and inertia level in SA as well as the interconnector flow35, so that SA is able to withstand the potential sudden loss of the imports. Practically, this corresponds to a co-optimization of FCAS, inertia and contingency size.
The new FRSC-OPF is solved through an optimization-by-simulation bi-section search with new constraints so that SA can securely cope with a contingency size equivalent to the variable import until the system can find a feasible point of operation. The solution thus reschedules the system (see Figure 6.7) so that the transfer of cheaper resources from VIC to SA is decreased to 137.4 MW (thereby reducing the contingency size) and synchronous output and FCAS reserves as well as inertia within SA are increased to comply with the desired Nadir limit.
Figure 6.7: Pre-contingency system operation status considering the Heywood Interconnector has only one available circuit (max. transfer capacity equal to 50%) with a maximum transfer that would allow SA to withstand its sudden loss.
The specific results for SA in each operation condition are presented in Table 6.1. As expected, the synchronous generation output increases in SA. This both reduces the amount of transfers from VIC to SA (contingency reduction) and also increases the inertia in the area (more synchronous units committed within the region). The primary frequency response in SA also becomes higher.
35 No reschedule is assumed for the Murraylink DC link, which under the given conditions is operated at maximum capacity and doesn’t transfer inertia or FCAS from the rest of the system.
G
2108.04 MW
1845.64 MW
G
12266.25 MW
13013.2 MW
G
9115.91 MW
9223.65 MW
G
2387.22 MW
1757.22 MW
107.7 MW
854.7 MW
125.0 MW
137.4 MW
8405.05 MW
7917.96 MW
G

65
Table 6.1: Results for the system dispatch without and with consideration of Heywood interconnector contingency.
SA Sync
Ouput (MW)
SA VRE Output (MW)
SA Import (MW)
SA n. of
online CCGT units
SA n. of
online OCGT Units
SA PFR
(MW)
SA SFR
(MW)
Base case 472 1197.6 438.4 2/2 2/30 97.7 288.5
With transmission contingency consideration
648 1197.6 262.4 2/2 4/30 130.7 278.8
The total amount of primary frequency response (PFR) and secondary frequency response (SFR) at the NEM level does not change when considering the transmission contingency, and is equal to 359.2MW and 597.3MW, respectively. However, SA is now allocated more PFR to withstand the transmission contingency and the primary reserves in the rest of the NEM (primarily in NSW) decrease accordingly to compensate the reallocation in SA. Since it is assumed that the frequency response due to largest generation contingency will be supported by all states, including SA, the system is thus prepared to withstand any generation contingency as well as the loss of the remaining circuit of the interconnector between SA and VIC.
It has also to be pointed out that the rest of the NEM after SA gets islanded would experience a high-frequency event due to loss of a large equivalent load. Therefore, adequate “Lower” FCAS services also need to be scheduled, as in this case.
Based on the above analysis, it can be concluded that there is significant potential for operational and possibly market-based measures such as co-optimization of inertia, FCAS and contingency size to improve system security. In particular, this should apply at a local level, whereby suitable requirements are scheduled in all of the potential regions at risk as well as for the whole NEM. This is because there may be particular challenges in dealing with security in smaller regions with lower inertia, which would require adequate provision of local FCAS too. Besides covering credible contingency cases, there is also an opportunity to use these options to deal with noncredible events, such as those driven by extreme weather, to make the system not only more reliable, but also more resilient.
6.5. Advanced protection schemes
Following up on the previous Section, it should be noted that the loss of an interconnector may be a particularly severe contingency event for an area that may experience very low inertia, with potentially very high ROCOF that could also cause Nadir issues, if not already breaching ROCOF limit requirements. In this respect, besides operational and technological measures that may be put in place, such as dynamic contingency rescheduling or FFR technologies, advanced protection schemes that can react very fast may also play a key role in

66
supporting provision of security. In particular, dedicated System Integrity Protection Schemes (SIPS) could be adopted that perform an “inter-trip” between the contingency event (e.g., loss of the interconnector) and the technology response (e.g., FFR through disconnection of demand-responsive loads or grid-connected batteries). The viability and design of such schemes need to be assessed case by case and alongside all the other alternative and complementary options.
6.6. New inertial response services
6.6.1. Valuing “differentiated inertia” levels
As widely discussed throughout this report, since inertia has always been plentiful in power systems there has not historically been any specific associated requirement. However, with the possibility of facing kinetic energy scarcity in future low-carbon systems, and with the growing and increasingly more complex interplay between inertial response, various FCAS, FFR, balancing services, etc., cases and discussions are being put forward for having the likes of “inertia markets”, formal “inertial response services”, and so forth.
While a comprehensive analysis of this issue is outside the scope of this work, some studies have been performed to demonstrate potential benefits and opportunities from formally “valuing” inertia, apart from the specific market-based or other type of mechanism to do so.
More specifically, the following modelling has been carried out. In the studies performed, also given the lack of information about such parameter, especially for future power plants, the inertia constant of all synchronous generators has been considered equal to an average value of 5MWs/MVA36. However, different generators may have different inertia constants, typically in the range of 2MWs/MVA to 10MWs/MVA. It is the inertia constant of the online units the parameter that eventually determines the system kinetic energy, which in turn affects the PFR requirement of the system and interacts with the other services as well. Therefore, a few study cases have been analysed to assess if allocating more specific inertia values to different synchronous generators could change the scheduling of the system, and then also provide indications as to the potential value and benefits of doing so.
6.6.2. Example: annual generation dispatch and benefits
A first analysis has been carried out with the FRSC-UC tool with reference to the “Nadir-constrained” 2050 CET&LL base case (2%/Hz damping factor, 49.2Hz Nadir limit). Two cases have then been considered:
- “Average inertia” case, whereby the inertia constant H of all generators is set to 5MWs/MVA, as in all studies.
36 The measuring unit of the generators’ inertia constant is also often briefly indicated in seconds.

67
- “Differentiated inertia” case, whereby the inertia constant H values for coal, hydro and OCGT plants have been set to 4, 3 and 3 MWs/MVA, respectively. With regards to CCGT, the inertia constant values of relatively high-cost plants have been set to 8MWs/MVA, while for lower-cost ones the value has been set to 6MWs/MVA37.
Studying the implications of these settings for the CCGT plants is of particular interest to demonstrate the potential of an inertial market or service. In this respect, the annual energy output for the two differentiated CCGT clusters is shown in Table 6.2 for the two cases considered. The output share of higher cost CCGT units increases from 17.6% to 18.7% in the “differentiated inertia” case, while for the lower cost CCGT unit it reduces from 13.7% to 12.4%38.
Since the higher cost units have been (arbitrarily) assigned a higher inertia constant value and are now being dispatched more in the “differentiated inertia” case, the results highlight that there is an intrinsic economic value in the generators’ inertia. This should not be surprising, since, by interacting with the rest of frequency response services, kinetic energy also impacts the dispatch of all generating units and the system schedule. At the system level, there are also both economic benefits and environmental benefits39.
Table 6.2: Generation output share for two CCGT clusters in “average” and “differentiated” inertia cases
Average inertia
Differentiated inertia
Low cost CCGT (5.9 GW, H=6s) 13.7% 12.4%
High cost CCGT (9.3 GW, H=8s) 17.6% 18.7%
37 The resulting average inertia constant of the whole generating portfolio is equal to 5.06 MWs/MVA, thus very close to 5 MWs/MVA in the “average inertia” case. All the “differentiated” inertia constant values considered are in line with information available in the literature, indicating in particular relatively higher values for CCGT plants.
38 In the modelling exercise performed, the installed capacity of higher-cost CCGT units is 9.3GW, while for lower-cost ones it is 5.9GW, which also explains the higher initial energy output from high-cost units.
39 In the specific example provided, the system economic benefits are fairly limited but material, in the order of 0.25%, while the environmental benefits assessed as reduction in VRE curtailment are in the order of 2%. However, further studies suggest that the benefits might be much more substantial in the presence of lower load damping.

68
6.7. Further considerations on frequency response services and technologies
It also has to be pointed out that frequency response adequacy assessment in low-inertia systems is a territory largely unexplored and, while the simplified modelling performed here provide insights into future system operation and has been checked with dynamic simulation tools, much more detailed analysis, which were out of the scope of the present work, are needed to understand the complex interactions among: low-inertia frequency dynamics; old and new sources of inertial, fast, primary and other frequency responses; voltage stability and reactive power response, especially in the presence of renewables; need for further security requirements such as to guarantee minimum short-circuit capacity levels in the system; rotor angle stability issues associated to geographical and temporal inertia changes across the NEM; and so on.
In particular, on top of the frequency response requirements discussed in this work, there might be other reasons why synchronous resources would be deployed (e.g., for reactive power support or for short-circuit power provision), and the interaction between all technologies and multiple services should be analysed in detail in order to provide system security at minimum cost.

69
7. Appendix: the National Electricity Market
7.1. General aspects of the NEM
The National Electricity Market (NEM)40 is the wholesale electricity market that supplies New South Wales, Queensland, Victoria, South Australia, Tasmania, and the Australian Capital Territory (ACT). The Australian Energy Market Operator (AEMO) is the Independent System Operator (ISO) of the NEM. The NEM currently supplies around 200TWh of electricity annually, or roughly 80% of Australian electricity consumption to more than 9 million customers. Over 300 generators are registered in the NEM, with around 47 GW of electrical generating capacity as of December 2016.
The NEM has markets for electrical energy and ancillary services41. Contingency Frequency Control Ancillary Service (FCAS) and Regulation FCAS are provided by the market, and Network Support and Control Ancillary Services (NSCAS) and System Restart Ancillary Service (SRAS) are provided under contracts. The NEM does not have a capacity market. Generators and retailers can also manage market risk using financial instruments such as over the counter (OTC) contracts and futures markets, and these can provide additional revenue to generators.
7.2. NEM operation
The NEM operates as a gross pool with five-minute dispatch intervals. Every five minutes, offers from generators are matched against real time demand to clear the market using a dispatch engine that co-optimises energy and FCAS, and relevant dispatch instructions are then issued to the market actors. This is carried out by a linear optimisation engine that operates close to real time. Differently from many other markets worldwide, no time ahead formal decisions and commitment are required. Instead, generators make their own commitment decisions and structure their offers accordingly. Prices for energy and for ancillary services in each NEM region are calculated using the outcomes from this dispatch optimisation. Offers can be submitted more than a day ahead of time, and every half hour a pre-dispatch process calculates and publishes demand, dispatch, and price forecasts for each half hour of the following day42. AEMO also publish market notices, e.g., lack-of-reserve forecasts. Unlike other
40 AER, "State of the energy market 2015", http://www.aer.gov.au/publications/state-of-the-energy-market-reports
41 AEMO, “Guide to the Ancillary Services Market”, https://www.aemo.com.au/-/media/Files/PDF/Guide-to-Ancillary-Services-in-the-National-Electricity-Market.ashx
42 This is the closest mechanism that there is in the NEM to some form of time-ahead unit commitment that is performed in other markets worldwide (for example by the system operator to formally check on system security); however, as a key difference, in the NEM the pre-dispatch bids are not binding.

70
markets and differently to what happens in most markets worldwide, this process is informational only, and there are no payments to or obligations on generators arising from the pre-dispatch process. Participants can change their offers up to the time of dispatch. AEMO nonetheless does have the ability to direct generators to operate under certain circumstances.

71
8. Appendix: Emissions reduction modelling scenarios description and input data
8.1. Scenario description
8.1.1. Business as Usual Scenario (BAU)
In the BAU scenario, when coal plants reach 35 years of age, a modest refurbishment is applied if the costs can be recovered within a 5-year payback period, otherwise the availability and the efficiency of the plant will decrease by 1 percentage point each year. All the coal plants are assumed to stop operating once they reach 60 years, or if they incur net trading losses.
8.1.2. Limited Lifetime (LL)
In the LL scenario, coal generating units close after 50 years, while major refurbishments are assumed to occur when they are needed. No emissions reduction target is applied for this scenario.
8.1.3. Clean Energy Target (CET)
In the CET scenario, coal generating units are not applied explicit closure rules; instead, the longevity will depend on their profitability.
The emissions-intensity threshold is set to be 0.6t CO2-e/MWh. New generators below the emissions-intensity threshold can earn certificates, while existing generators that do not receive Renewable Energy Targets (RET) certificates can earn certificates for generation above their historical baseline level. The CET trajectory grows from zero in 2020 to 2050, in order to achieve the emission reduction target.
The emissions reduction target of CET is set to reduce 28% of the emission of 2005’s level by 2030.
8.1.4. Clean Energy Target and Limited Lifetime (CET&LL)
In the CET&LL scenario, coal generating units’ closure rules operate as indicated in the LL scenario, while a low emission target scheme operates as indicated in the CET scenario. The emission reduction target of CET&LL is set to reduce 28% of the emissions of 2005’s level by 2030.
8.1.5. Emissions Intensity Scheme (EIS)
In the EIS scenario, coal generating units are not applied explicit closure rules; instead, their longevity will depend on its profitability.
The emissions intensity baseline is set for the electricity sector as a whole. This baseline is consistent with the emissions reduction target, which starts at grid

72
average emissions intensity in 2020 and linearly declines to meet the emission reduction target in 2030. The gradient will then be maintained through to 2050.
The emissions reduction target of EIS is set to reduce 28% of the emissions of 2005’s level by 2030.
8.2. Input data
8.2.1. Electricity demand
A 50% probability-of-exceedance (POE) median peak demand is used for all scenarios. The minimum level and maximum level of electricity demand (which is the same for all scenarios) throughout the years up to 2050 is shown in Figure 8.1, while Figure 8.2 shows an example of load profiles that have been used.
Figure 8.1: Range of electricity demand (min to max) for all scenarios to 2050
Figure 8.2: Hourly demand profile for two representative weeks in year 2040, including minimum and maximum demand periods

73
8.2.2. Installed capacity by scenario
Figure 8.3 to Figure 8.7 show the evolution of installed capacity of different types of resources for the different scenarios.
Figure 8.3: Installed capacity (business as usual – BAU)
Figure 8.4: Installed capacity (limited lifetime – LL)

74
Figure 8.5: Installed capacity (clean energy target and limited lifetime – CET&LL)
Figure 8.6: Installed capacity (clean energy target – CET)

75
Figure 8.7: Installed capacity (emissions intensity scheme – EIS)
8.2.3. Example of VRE generation profiles
Figure 8.8 and Figure 8.9 show examples of hourly generation profiles in two different weeks for solar energy and wind energy, respectively, for different regions of the NEM in two different years.
Figure 8.8: Hourly solar available output for two representative weeks in year 2020 and 2040

76
Figure 8.9: Hourly wind available output for two representative weeks in year 2020 and 2040

77
9. Appendix: Main definitions, modelling assumptions and input data for system security studies
9.1. Security: general definition and definition for the purpose of this work
Power system security is generally concerned with the strength of the electrical power system to tolerate and respond to system disturbances without suffering equipment damage while maintaining quality of electricity supply to customers43.
Power system security is achieved by operating the power system in a satisfactory and stable operating state, by maintaining the system frequency, voltages at various points, power flows in all transmission lines, and all power stations’ outputs within predefined limits, as well as ensuring that the system operational points are such as to activate circuit breakers and disconnect the faulty equipment.
Security assessment requires power systems engineering analysis tools (e.g., load flow and stability modelling), which help in defining a secure system envelope within which the market can be dispatched and customer demand can be met.
These types of studies, fundamentally operational in their nature, have been performed within this work through state of the art and bespoke modelling tools able to simulate and optimize the economic operation of the system subject to predefined limits (“constraints”).
In particular, for the purposes of this work, focus has been put on frequency response adequacy aspects, which may become a particularly severe issue with larger penetration of non-synchronous renewable energy sources and therefore in lower inertia systems, as already experience in the recent Black System event in South Australia in September 2016. More specifically, we have addressed this general security issue by assessing whether, in each modelling scenario under analysis, there were sufficient resources and facilities (to be operated with appropriate operational requirements and strategies) to guarantee adequate system frequency response following a disturbance (or “contingency”).
Considerations on the other aspects of power systems security listed above have also been provided both quantitatively and/or qualitatively.
43 Further details about power systems security and related matters are provided in Chapter 4 of the National Electricity Rules: http://www.aemc.gov.au/getattachment/d1308438-44e2-42d0-8582-1ead65c93f3d/National-Electricity-Rule-Version-3.aspx

78
9.2. Definition of credible and noncredible contingencies in the NEM
Contingencies are classified in the NEM as credible and non-credible under the NER44.
According to the current practices, the power system is operated in such a way that it will remain in a satisfactory operating state for the loss of single elements in the transmission network. These events are defined as credible contingency events and include:
Unexpected loss of a single transmission line, transformer or reactive plant; Unexpected loss of a single generating unit.
AEMO considers the occurrence of these events to be reasonably possible and ensures contingency plans are in place to minimise impact on the power system following a credible contingency event.
A non-credible contingency is a contingency event other than a credible contingency. Examples include:
Three phase electrical faults; The trip of any busbar in the transmission network; The trip of more than one transmission element; The trip of transmission plant in a manner not considered likely (e.g., a
transmission line that trips at one end only); The trip of multiple generating units; The trip of more than one load block in a region where the combined load
lost exceeds what would normally be considered a credible contingency event in that region.
AEMO does not normally operate the power system such that it will remain in a satisfactory operating state following a non-credible contingency event, as the likelihood of this occurrence is low. This is also aligned with the practices of most system operators worldwide.
AEMO may reclassify a non-credible contingency event as a credible contingency event if the risk of this event impacting the power system is increased due to abnormal conditions45 . Abnormal conditions may include severe weather conditions, lightning and bushfires.
44 National Electricity Rules, http://www.aemc.gov.au/energy-rules/national-electricity-rules/current-rules
45 AEMO, “Review of Power System Reclassification Events: 1 November 2015 to 30 April 2016 for the NEM”, September 2016. https://www.aemo.com.au//media/Files/Electricity/NEM/Market_Notices_and_Events/Reclassification-events/Reclassification-report-Nov-2015-to-April-2016.pdf

79
9.3. Main assumptions for FCAS and frequency response modelling
A number of consistent assumptions for FCAS modelling, including on numerical values of key study parameters, have been applied to all cases.
First of all, without loss of generality for the purposes of assessing the high level security characteristics of each scenario the focus has been put on the “Raise” services (corresponding to the responds to a sudden substantial frequency drop, typically due to a generation or network loss contingency)46.
Specific generation headroom and ramp constraints for the different FCAS have been considered. The synchronous generators providing the fast response service (6 seconds), in particular, require the definition of transient ramp capability, modelled as response slopes vs headroom capacity47. Relevant information was gathered through the analysis of bidding data in the FCAS market by the different generators in NEM. Those results were also cross-checked with international references. This exercise yielded high levels of correlation between international parameters and average parameters for NEM units. The 60 seconds and 5 minutes reserves have then been modelled by using the generators’ nominal ramp rates, thus assuming that the relevant spinning headroom could be fully deployed in these time frames.
For the purposes of analysing the system’s response to event that could cause extreme frequency instability, the maximum credible contingency in the system (as from the information provided from the scenario modelling outputs) has been taken as a synchronous generation loss of 700 MW48. It has also been assumed that loss of multiple units connected to the main system is not a credible contingency.
Further to that, and especially considering that for extreme situations in future scenarios with more and more renewables smaller units might be scheduled, we have also considered a dynamic assessment of the largest contingency being co-optimised with FCAS and synchronous inertia (see also Section 6.4 for specific applications).
46 Similar conditions would be applied to the “Lower” service, which is generally less demanding in terms of response as in most cases there is some option to decrease generation output in a sufficiently fast way (including curtailment of renewable energy output) in the case of a frequency rise.
47 As in general the frequency control requirements are a function of both the level of inertia and the ramping capability of different power plants, this ramping capability needs to be modelled in detail, especially in terms of transient ramps that generators can deliver within the 6s service. We have modelled these as close as possible in terms of actual characteristics and constraints as from data available for the current generators from the NEM.
48 The unit corresponds to “Kogan Creek 1”, in Queensland South. In this worst case analysis it is thus assumed that Kogan Creek 1 is always operated, for the sake of simplicity, which happens in most cases considering its relatively low marginal cost.

80
The response of the generators providing reserves is considered to take place with the delay associated to a frequency response dead-band of 0.150Hz as from current standards, after which ramping of conventional generators take place.
A frequency damping factor equal to 3%/Hz is currently considered by AEMO for a loss of generation in the NEM (1.5% per 1% frequency change)49. However, while the 3% case corresponds to current practices, a range of values might apply in the future, so that sensitivities considering variations of between 1%/Hz and 3%/Hz have been analysed. In fact, the 1% (or potentially even less) case might be more representative of future scenarios with smaller volume of frequency-dependent load in the system (e.g., due to larger volumes of electronically interfaced devices, electric vehicles, inverter-driven air conditioning systems, etc.). This is also is in line with the figures used elsewhere, for example in the UK. As discussed during the project, an intermediate damping value of 2%/Hz has been considered as realistic base case compromise for analysis of future scenarios.
The inertia constant for all generators has been assumed equal to H=5MWs/MVA.
9.4. Main operational limits adopted in the base case security assessment studies
Since in the FRSC-OPF algorithm the response requirements are dynamically calculated subject to the relevant constraints and the incumbent conditions of VRE output and demand level, the resulting generating units’ dispatch will depend on the specific operational limits that imposed for ROCOF, frequency Nadir and QSSF, as well as other parameters such as the load damping factor.
From discussions within the project, it was agreed that the following numerical values would be taken as base case:
- Frequency Nadir limit = 49.2Hz - ROCOF limit = -1 Hz/s - QSSF60s = 49.5Hz - QSSF5min = 49.85Hz - Load damping factor = 2%/Hz
However, sensitivities have also been performed for various parameters, in particular, for the damping factor (given its uncertain value in the future) between 1%/Hz and 3%/Hz, and the Nadir (between 48.5Hz, corresponding to a more relaxed frequency control in a low-inertia system, and 49.5Hz, corresponding to tighter requirements as today).
A maximum allowed ROCOF limit of 1Hz/s was deemed appropriate as the main case in that, as discussed, it could prevent large changes of frequency that could
49 AEMO, Frequency Control Ancillary Services, March 2012

81
trip off embedded generation (for example whose islanding schemes were to be set through ROCOF measurements) or potentially even conventional generators that could undergo excessive physical stresses. This is line with developments in other countries such as UK and Ireland. Sensitivity studies have also been performed to check the operational implications of different ROCOF limits when lowered to 0.5Hz/s.
9.5. Definition of the System Non-Synchronous Penetration (SNSP) level index
For the mainland NEM region as a whole, the SNSP, expressed in % of the incumbent demand, can be simply defined as:
𝑆𝑁𝑆𝑃𝑡% =𝑁𝑜𝑛𝑠𝑦𝑛𝑐ℎ𝑜𝑛𝑜𝑢𝑠 𝑜𝑢𝑡𝑝𝑢𝑡𝑡
𝐷𝑒𝑚𝑎𝑛𝑑𝑡
=𝑁𝑜𝑛𝑠𝑦𝑛𝑐ℎ𝑜𝑛𝑜𝑢𝑠 𝑜𝑢𝑡𝑝𝑢𝑡𝑡
𝑁𝑜𝑛𝑠𝑦𝑛𝑐ℎ𝑜𝑛𝑜𝑢𝑠 𝑜𝑢𝑡𝑝𝑢𝑡𝑡 + 𝑆𝑦𝑛𝑐ℎ𝑜𝑛𝑜𝑢𝑠 𝑜𝑢𝑡𝑝𝑢𝑡𝑡
where the subscript t indicates that the index needs to be calculated at every relevant time step t.
9.6. Specific input data for FRSC-UC studies for dynamic assessment of minimum synchronous generation levels
The maximum credible generation loss is set to 700 MW.
The dead-band of frequency response activation is set to 150 mHz, as for the FRSC-OPF tool used in the main studies, whilst also a response delay of 0.5s has been added50.
The default settings of load damping and frequency Nadir allowance are 2%/Hz and 49.2 Hz, respectively.
The maximum allowed ROCOF is set to 1 Hz/s.
The static FCAS reserve constraints are calculated at 49.5 Hz at both 6 and 60 seconds.
The 5 minutes FCAS is assessed for 50±0.15Hz.
The one-hour flexibility reserve is calculated based on uncertainty and variability of wind and solar generation extrapolating current data.
50 This is an average value that has been assessed by dynamic simulations of different types of power plants according to standard dynamic models. It should be noted that in the FRSC-OPF studies previously performed this delay has not been modelled, and a comparison between relevant results could bring important insights.

82
All synchronous generators are assumed to be characterised by an average inertia constant of H=5MWs/MVA.
9.7. Further information on main input data and assumptions used for the security assessment studies for all scenarios
The security assessment analysis has been primarily conducted for snapshots of the system in various conditions, as from the emissions reduction modelling scenario input data received, and based on various relevant assumptions that are described below.
9.7.1. General inputs and assumptions
System
The system that has been modelled corresponds to a single busbar equivalent of the NEM - this means that the effects of the transmission network are not being taken into consideration, as discussed during the project51.
Timeframe
The analysis has been conducted for snapshots of the system in various conditions. In particular, for each scenario a set of 8 years has been analysed, namely every 5 years between 2020 and 2050, as well as year 2017.
Generation
The generation capacity available in each scenario has been divided in two general sets, namely, synchronous capacity and non-synchronous capacity.
Synchronous capacity: includes thermal technologies using coal and gas as
fuels, as well as hydro and pumped storage units. Following previous
modelling52, for computational speed purposes, the corresponding units of
the system are clustered (using a K-means algorithm) for each considered
year by technology and by state (mindful of potential future regional
analysis) based on the units’ capacity and variable cost. This leads to a set of
clusters with a representative capacity, incremental cost of generation and
number of units, whose aggregate capacity is equal to the input capacity by
technology. Additionally, synchronous generation clusters are represented
by a minimum stable generation level, inertia constant, maximum transient
and static ramp rates, maximum reserve headroom, and relation between
51 However, considerations for interconnector contingencies and possible islanded operations of regions such as South Australia o Tasmania have also been made on several case studies.
52 L. Zhang, T. Capuder and P. Mancarella, Unified unit commitment formulation and fast multi-service LP model for flexibility evaluation in sustainable power systems, IEEE Transactions on Sustainable Energy, vol. 7, no. 2, pp. 658-671, April 2016.

83
headroom and ramping limit when applicable (e.g., in the case of “fast raise”
response service). Due to their low levels of penetration and for the sake of
simplicity, biomass units are assumed to provide all their inertia and 50%
output relative to installed capacity in each year.
Non-synchronous capacity: includes Variable Renewable Electricity (VRE)
sources such as wind and solar (large and small scale) technologies. These
technologies are represented by means of various levels of available
generation output (relative to installed capacity) for each of them. These
output availability levels are calculated from the generation profiles given as
input to this study, in order to represent relevant cases in the assessment of
security.
Demand
Demand profiles have been calculated from the scenario modelling information provided, using the relevant hourly profiles and maximum demand for each state separately. Maximum and minimum system demand levels have then been determined for each year. Additionally, maximum and minimum levels of demand have been established for potential regional analysis.
Inertia provision by synchronous machines
It has been assumed that when a synchronous machine reaches its minimum stable generation it provides an amount of kinetic energy that is conventionally represented through its inertia constant. An average inertia constant value equal to 5MWs/MVA has been taken as indicative for each machine providing inertia in the system, also based on different sources.
9.7.2. Snapshots scenarios
Demand
Demand levels have been analysed for snapshots of maximum and minimum values for each year. The exact date and time for maximum and minimum demand might slightly change if a different method for energy rescaling from the data provided is used. However, the general results would still hold. In this particular case, the hourly demand trend was built considering the peak demand, total energy consumption and demand profiles given for each state and year. To fit the seasonal trends of the NEM, additional data from AEMO NEMWEB was used to determine the weekly level of energy from real operation data for years 2015 and 2016.
VRE output
The main levels of available energy output (relative to the installed capacity) from renewables that have been considered were chosen based on the scaled profiles for each technology in each state and scenario. Further, more extreme cases of resource availability have been considered to stress test the system. It has also to be pointed out that the final actual dispatched VRE output might be

84
lower than the available VRE output if frequency stability constraints require curtailment of renewable generation as a means to provide security.
The scenarios considered for VRE available output depend on the level of demand as follows:
Minimum Demand
Very high wind and no solar (night): 90% output of wind, 0% output of
solar technologies, and 50% output of biomass is available.
Medium wind and no solar (night): 50% output of wind, 0% output of
solar technologies, and 50% output of biomass is available.
Medium-low wind and no solar (night): 40% output of wind, 0% output
of solar technologies, and 50% output of biomass is available.
Low wind and no solar (night): 10% output of wind, 0% output of solar
technologies, and 50% output of biomass is available.
Maximum Demand
VRE 50%: 50% of output (relative to the installed capacity of VRE) is
available.
VRE 80%: 80% of output is available.
VRE 90%: 90% of output is available.
Medium-high wind and low solar: 60% output of wind, 10% output of
solar technologies, and 50% output of biomass is available.
Medium-high wind and medium-low solar: 60% output of wind, 20%
output of solar technologies, and 50% output of biomass is available.
Medium-low wind and low solar: 40% output of wind, 10% output of
solar technologies, and 50% output of biomass is available.
Very high wind and low solar: 90% output of wind, 10% output of solar
technologies, and 50% output of biomass is available.
Hydro-resources were also modelled separately and more specifically:
Hydro output: To explore the effect of availability of hydro resources, four
scenarios for hydro output availability (relative to installed capacity) were
considered:
Hydro 100%: Full hydro output is available.
Hydro 50%: 50% of hydro output is available.
Hydro energy: Hydro output availability is modelled through the
capacity factor of the technology in every year, as given by the yearly
energy yield in the scenario results.
No hydro: an extreme case with no hydro available in the system.
Pumped-Storage: To explore the effect of pumped-storage, two operation
modes were considered:
Generation mode: Pumped-storage is considered with the relevant
generating constrained used above for Hydro output level.
Load mode: Pumped-storage is in pumping mode, and the relevant
inertia is added to the system.


![ORIGINAL STRESS SCORE Y LnrRMSSD COMO PARÁMETROS DE …cdeporte.rediris.es/revista/inpress/artstress1105.pdf · 2018-08-24 · (SWC) de Hopkins, Marshall, Batterham, & Hanin [20]](https://img.dokumen.tips/doc/110x75/5e6ea0f36ea1591f857062e6/original-stress-score-y-lnrrmssd-como-parmetros-de-2018-08-24-swc-de-hopkins.jpg)



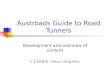


![CAFEO 31 Building Blocks for Quality in Engineering Education [An Australian Experience] Paul Mitchell FIEAust CPEng APECEng Engineers Australia](https://img.dokumen.tips/doc/110x75/56649da25503460f94a8e90f/cafeo-31-building-blocks-for-quality-in-engineering-education-an-australian.jpg)