Embed Size (px)
Citation preview
Unidad 5
Controladores “PLC”
1. Definición.
2. Memorias.
3. Programación.a. Lista de instrucciones.b. Diagrama escalera.
4. Simbología.
5. Ejemplos.a. Enunciadob. Diagrama europeo.c. Diagrama en PLC allen bradley y siemens.
6. Conclusiones.
7. Bibliografía.

DEFINICION.
Un controlador lógico programable (Programmable Logic Controller PLC) Es un dispositivo operado digitalmente, que usa una memoria para el almacenamiento interno de instrucciones con el fin de implementar funciones específicas, tales como lógica, secuenciación, registro y control de tiempos, conteo y operaciones aritméticas, para controlar a través de entradas/salidas digitales o analógicas, varios tipos de máquinas o procesos.
PLC SIEMENS PLC ALLEN BRADLEY
El controlador Programable tiene la estructura típica de muchos sistemas programables, como por ejemplo una microcomputadora. La estructura básica del hardware de un consolador Programable propiamente dicho esta constituido por:
- Fuente de alimentación
- Unidad de procesamiento central (CPU)
- Módulos de interfases de entradas/salidas (E/S)
- Modulo de memorias
- Unidad de programación
MEMORIAS.
Introducción
La memoria es el almacén donde el autómata guarda todo cuanto necesita para ejecutar la tarea de control.
Datos del proceso:
Señales de planta, entradas y salidas. Variables internas, de bit y de palabra. Datos alfanuméricos y constantes.
Datos de control:
Instrucciones de usuario (programa) Configuración del autómata (modo de funcionamiento, número de e/s conectadas, ...)
Existen varios tipos de memorias:
RAM. Memoria de lectura y escritura.ROM. Memoria de solo lectura, no reprogramable.EPRON. Memoria de solo lectura, reprogramables con borrado por ultravioletas.EEPRON. Memoria de solo lectura, alterables por medios eléctricos.
La memoria RAM se utiliza principalmente como memoria interna, y únicamente como memoria de programa en el caso de que pueda asegurarse el mantenimiento de los datos con una batería exterior.
La memoria ROM se utiliza para almacenar el programa monitor del sistema como hemos visto en el apartado dedicado a la CPU.
Las memorias EPROM se utilizan para almacenar el programa de usuario, una vez que ha sido convenientemente depurada.
Las memorias EEPROM se emplean principalmente para almacenar programas, aunque en la actualidad es cada vez más frecuente el uso de combinaciones RAM
+ EEPROM, utilizando estas ultimas como memorias de seguridad que salvan el contenido de las RAM. Una vez reanudada la alimentación, el contenido de la EEPROM se vuelca sobre la RAM. Las soluciones de este tipo están sustituyendo a las clásicas RAM + batería puesto que presentan muchos menos problemas.
Memoria interna
En un autómata programable, la memoria interna es aquella que almacena el estado de las variables que maneja el autómata: entradas, salidas, contadores, relés internos, señales de estado, etc. Esta memoria interna se encuentra dividida en varias áreas, cada una de ellas con un cometido y características distintas.
La clasificación de la memoria interna no se realiza atendiendo a sus características de lectura y escritura, sino por el tipo de variables que almacena y el numero de bits que ocupa la variable. Así, la memoria interna del autómata queda clasificada en las siguientes áreas.
Área de imágenes de entradas/salidas y Área interna (IR).
En esta área de memoria se encuentran:
Los canales (registros) asociados a los terminales externos (entradas y salidas).Los relés (bit) internos (no correspondidos con el terminal externo), gestionados como relés de E/S.Los relés E/S no usados pueden usarse como IR.No retienen estado frente a la falta de alimentación o cambio de modo de

operación.
Área especial (SR).
Son relés de señalización de funciones particulares como:
Servicio ( siempre ON, OFF)Diagnosis ( señalización o anomalías)Temporizaciones (relojes a varias frecuencias)CálculoComunicacionesAccesible en forma de bit o de canal.No conservan su estado en caso de fallo de alimentación o cambio de modo.
Área auxiliar (AR).
Contienen bits de control e información de recursos de PLC como: Puerto RS232C, puertos periféricos, casetes de memoria...
Se dividen en dos bloques:
Señalización: Errores de configuración, datos del sistema.
Memorización y gestión de datos
Es un área de retención.Accesible en forma de bit o de canal.No conservan su estado en caso de fallo de alimentación o cambio
de modo.
Área de enlace (LR).
Se utilizan para el intercambio de datos entre dos PLC´s unidos enforma PC Link(1:1).Dedicados al intercambio de información entre PLC´s.Si no se utilizan como LR pueden usarse como IR.Accesible en forma de bit o canal.No conservan su estado en caso de fallo de alimentación o cambio de modo.

Área de retención (HR).
Mantienen su estado ante fallos de alimentación o cambio de modo de PLC.Son gestionados como los IR y direccionables como bit o como canal.
Área de temporizadores y contadores (TIM/CNT).
Es el área de memoria que simula el funcionamiento de estos dispositivos.Son usados por el PLC para programar retardos y contajes.
Área de datos (DM).
Se trata de memoria de 16 bits ( palabra).Utilizable para gestión de valores numéricos.Mantiene su estado ante cambios de modos de trabajo o fallo de alimentación.Direccionables como Canal(palabra).Esta área suele contener los parámetros de configuración del PLC(setup).
Las variables contenidas en la memoria interna, pueden ser consultadas y modificadas continuamente por el programa, cualquier número de veces. Esta actualización continua de los datos obliga a construir la memoria con dispositivos RAM.
Memoria de programa
La memoria de programa, normalmente externa y enchufable a la CPU mediante casete de memoria, almacena el programa escrito por el usuario para su aplicación.
Cada instrucción del usuario ocupa un paso o dirección del programa.
Las memorias de programa o memorias de usuario son siempre de tipo permanente RAM + batería o EPROM/EEPROM . Por lo general la mayoría de los fabricantes de autómatas ofrecen la posibilidad de utilizar memorias RAM con batería para la fase de desarrollo y depuración de los programas, y de pasar estos a memorias no volátiles EPROM o EEPROM una vez finalizada esta fase.

La ejecución del programa en el módulo es siempre prioritaria, de forma que si se da tensión al autómata con un módulo conectado, la CPU ejecuta su programa y no el contenido en memoria RAM interna.
PROGRAMACION.
Para toda la familia de autómatas Simatic S7 se emplean los siguientes lenguajes de programación:
Lista de instrucciones (AWL). Esquema de contactos (KOP): se representa gráficamente con símbolos
eléctricos.
Internamente el autómata solo trabaja con lista de instrucciones, KOP es traducido a AWL por Step7.
Las instrucciones son las órdenes lógicas elementales que el sistema debe obedecer. Suelen ocupar una línea de programa (dos en algunas instrucciones), y no pueden escindirse en instrucciones parciales.
Las instrucciones AWL se dividen en:
• OPERACION: indica la instrucción que se ha de realizar (ej. AND).
• OPERANDO: indica una constante o dirección con la que debe trabajar la operación. Si se trata de una dirección se puede manejar en modo bit, byte o palabra.
Lenguaje de escalera (Tipo NEMA)
Es el más conocido en el área de influencia norteamericana, ya que invariablemente todos los PLC de fabricación americana o japonesa permiten su programación en este lenguaje; ya sea para emplear los mismos diagramas de control alambrado existentes en las máquinas que se reconvierten o, ya sea para capacitar fácilmente al personal de mantenimiento en el manejo y arreglo de estos aparatos.
Conceptos de diagramas de escalera aplicados a PLC’s.
Los elementos principales son: contactos y bobinas.
Los contactos o condiciones pueden ser de: entradas digitales, salidas digitales, temporizadores, contadores o, marcas (también llamadas banderas o memorias internas, que son equivalentes a los relevadores auxiliares en tableros alambrados).

Lo que llamamos "bobinas" es el resultado de la operación y "enciende" cuando las condiciones precedentes se cumplen, o en términos eléctricos, existe un camino de contactos en serie cerrados.
Además, existen dos tipos de bobinas: retentiva (tipo latch) y no retentiva.
Simbología tipo Texas Instruments
Símbolo Concepto
X Entrada
Y Salida
C Bandera o memoria
T Temporizador
C Contador
S Instrucción Set
R Instrucción Reset
Diagrama de escalera
Un diagrama de escalera es la representación gráfica en forma de diagramas de circuitos.
Similar a los esquemas de circuitos usados en control convencional.

SIMBOLOGIA.
CONTACTOS
Contacto normalmente abierto:
Contacto normalmente cerrado:
SALIDAS
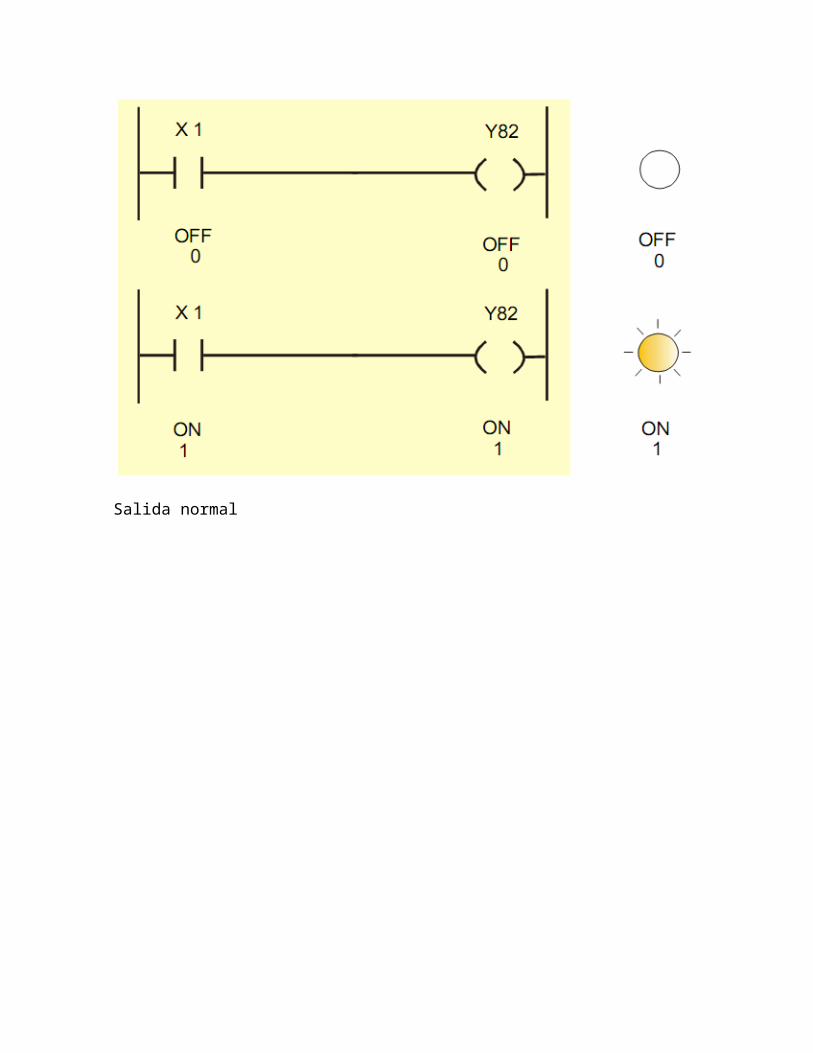
Las salidas como su nombre lo indica sirven para activar a un dispositivo de salida o bien a un contacto interno.
Se representan de la siguiente manera:
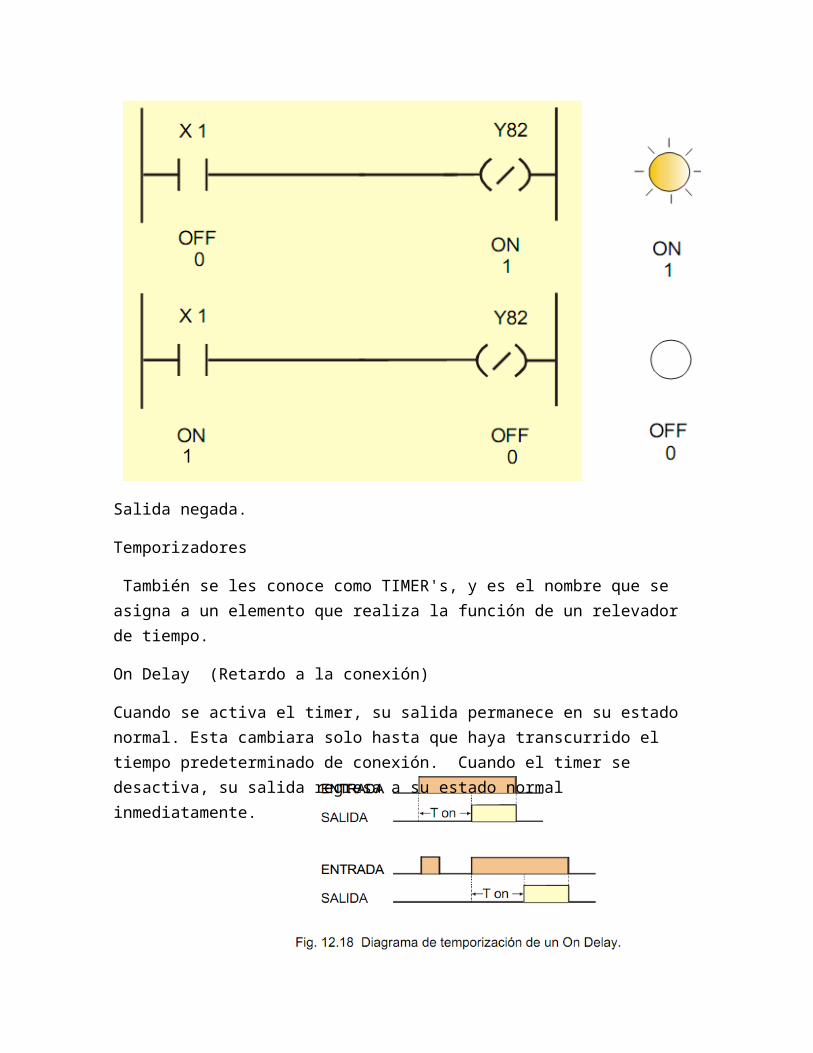
Salida normal

Salida negada.
Temporizadores
También se les conoce como TIMER's, y es el nombre que se asigna a un elemento que realiza la función de un relevador de tiempo.
On Delay (Retardo a la conexión)
Cuando se activa el timer, su salida permanece en su estado normal. Esta cambiara solo hasta que haya transcurrido el tiempo predeterminado de conexión. Cuando el timer se desactiva, su salida regresa a su estado normal inmediatamente.

Off Delay (Retardo a la desconexión)
Cuando activamos este timer su salida se activa inmediatamente. Al desactivar el timer, su salida permanece activada hasta que transcurra el tiempo predeterminado de desconexión.
EJEMPLOS DESARROLLO, SIMULACION EN DIAGRAMA ESCALERA Y PROGRAMACION EN PLC.
Simulacion software CAD_SIMU
Rslogix



Step7

CONCLUCIONES.
El uso del PLC en los sectores industriales ha facilitado mucho el desarrollo de muchas aplicaciones aparte del ambiente industrial que es más rudo como para el uso de algún componente electrónico como puede ser un micro controlador, o en otros casos que ha suplantado el uso de la relevación y ha ayudado en mucho ya que la relevación que antes era muy usada pero a su vez traía muchos problemas en cuanto a que para hacer una modificación en el proceso en relevación es muy difícil hacer cambios cuando el proceso es demasiado grande y en cambio en el PLC con solo cambiar unas pocas líneas del programa se puede adaptar al nuevo proceso y no necesita tanto mantenimiento como se necesita en la relevación. Todas estas ventajas además de muchas más son por las que el PLC ha venido cambiando el uso de la relevación.

BIBLIOGRAFIA
http://catarina.udlap.mx/u_dl_a/tales/documentos/lmt/maza_c_ac/capitulo4.pdf
http://www.efn.uncor.edu/departamentos/electrotecnia/cat/eye_archivos/apuntes/a_practico/CAP%209%20Pco.pdf
http://www.mailxmail.com/curso-controladores-logicos-programables/estructura-basica-plc
http://instrumentacionycontrol.net/Descargas/Descargas/SIEMENS/Automatas%20_PLC/IyCnet_Programacion_AWL.pdf
http://www.espaciodelconocimiento.com/4%20SA%20CAPITULO%20XII%20DIAGRAMAS%20DE%20ESCALERA.pdf
Ejemplos apuntes de Cuaderno de PLC de semestre anterior.





























