Embed Size (px)
Citation preview

Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
www.elsevier.com/locate/cma
Post-collapse analysis of plates and shells basedon a rigid–plastic version of the TRIC element q
Leone Corradi a, Nicola Panzeri b,*
a Department of Nuclear Engineering, Politecnico, Via Ponzio 34/3, Milano 20133, Italyb Department of Structural Engineering, Politecnico, Piazza Leonardo da Vinci 32, Milano 20133, Italy
Received 15 December 2002; received in revised form 22 May 2003; accepted 22 May 2003
Abstract
The knowledge of the post-collapse response of structures is required in several situations. Typical examples are
shells used as energy absorbers or bumpers, which must be able to undergo large plastic deformations by dissipating a
sufficient amount of energy. The procedure known as sequential limit analysis can be employed to this purpose. The
evolution of the structure after collapse is tracked by a sequence of rigid–plastic limit analyses, with the structural
geometry progressively updated on the basis of the collapse mechanism computed in the previous step. A number of
methods have been developed, mostly in recent years, for the finite element solution of the limit analysis problem. In
this paper, a procedure proposed by one of the authors is employed, which a rather extensive computational experience
proved reliable, stable and accurate. The procedure demands that the finite element be formulated on the basis of the
natural approach, which suggests the use of a simple but well performing triangular shell element, named TRIC, re-
cently developed within this framework by Argyris and co-workers. The formulation has to be modified to some extent
to adapt to the rigid–plastic context, but the quality of the element performances is maintained. Some computations,
referring to plates and shells, are presented, which assess that the ‘‘marriage’’ between the TRIC element and sequential
limit analysis is successful.
� 2003 Elsevier B.V. All rights reserved.
Keywords: Plates; Shells; Post-collapse behavior; Rigid–plastic analysis; Sequential limit analysis
1. Introduction
The numerical solution of the limit analysis problem for perfectly plastic structures discretized via finite
elements has experienced a growing interest in recent years, as witnessed by several papers on the subject
qPartial results were presented at the 6th International Conference on Computational Structures Technology (CST2002), Prague,
4–6 September 2002.* Corresponding author. Tel.: +39-02-2399-4351; fax: +39-02-2399-4220.
E-mail address: [email protected] (N. Panzeri).
0045-7825/$ - see front matter � 2003 Elsevier B.V. All rights reserved.
doi:10.1016/S0045-7825(03)00373-6

3748 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
(see, e.g., [1–10]). Solution methods mainly exploit the kinematic (upper bound) theorem, reducing theproblem to the search of the minimum of a convex, albeit non-smooth function. These methods can be
employed also to obtain indications on the structural response subsequent to collapse, which must be
considered in several instances. Examples are structures that must be able to develop large plastic defor-
mations, such as energy absorbers or bumpers. The post-collapse evolution is followed by performing a
sequence of rigid–plastic limit analyses with the structural geometry updated on the basis of the collapse
mechanism obtained at the end of the previous step. Since elastic strains are neglected, only the rigid–plastic
response is tracked, which however provides a meaningful piece of information on the energy that the
structure can dissipate and on its deformation capabilities.Such a procedure is known as sequential limit analysis. To the authors knowledge, it was first proposed in
the early 1960s to study the post-collapse response of plastic frames (see [11]). The method received new
attention with the work of Yang on trusses [12] and recently Seitzberger and Rammerstorfer [13] used it
successfully to simulate the large deformation crushing behavior of shells with polar symmetry. In a pre-
vious work [14] the authors performed a fairly extensive study by computing the post-collapse rigid–plastic
curves for cylindrical shells, cones and hemispheres under different load conditions. Results assess the ef-
fectiveness of sequential limit analysis, which appears accurate, robust and reliable both for rising (stable)
and decreasing (unstable) behaviors.In the paper above, sequential limit analysis was employed in conjunction with the limit analysis pro-
cedure established in [6]. In contrast to alternative approaches, mostly based on regularization techniques
originated by a proposal of Huh and Yang [1], this procedure deals with the non-smooth nature of the
function to be minimized by detecting and eliminating from the problem the finite elements that do not
undergo plastic flow in the collapse mechanism, which are considered as rigid. To enforce this condition, it
is essential that the finite element be formulated on the basis of the natural approach introduced by Argyris
[15,16], separating deformation modes from rigid body motions: in fact, in a rigid element the first vanish,
but the latter must survive.Only shell elements exhibiting polar symmetry were considered in [14] and, in this situation, the natural
formulation does not entail difficulties. However, polar symmetry is a quite severe restriction, in that only
particular shells can be handled and even axisymmetric shells might collapse according to diamond-shaped
mechanisms or loose polar symmetry during their post-collapse evolution. To broaden the range of ap-
plicability of the method, more general elements are demanded. Well performing shell elements, however,
are rare and usually involve high order shape functions, which makes the separation of deformation from
rigid modes cumbersome.
Recently, a simple triangular shell element, named TRIC, has been developed by Argyris and co-workers[17], and its formulation rests on the natural approach, making it a spontaneous candidate for the pro-
cedure. The element is simple but sophisticated (using authors� terminology), non-conforming but con-
verging [18], accounts for transverse shears without locking at the thin shell limit and several elastic
computations assess its robustness and accuracy also in situations involving large displacements and rot-
ations. Very recently the element was used for elastic–plastic analyses and results indicate that its perfor-
mances are maintained also in the presence of material non-linearity [19].
In this study, a rigid–plastic version of the TRIC element is proposed, which appears suited for se-
quential limit analysis. To preserve the element performances, modifications with respect to the originalformulation are reduced as much as possible, but the different context demands some change. In particular,
the role of the elastic strain energy, a positive definite quadratic form, is played by the power of dissipation,
a positively homogeneous of degree one function of strain rates, and this affects the formulation to some
extent. On the other hand, other aspects are simpler, since limit analysis does not require the definition of
the geometric stiffness and, when based on the kinematic theorem, of the stress state within the element.
Moreover, the TRIC element has the capability of dealing with layered shells, which is not exploited in this
paper, where only homogeneous shells are considered.

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3749
The outline of the paper is as follows. Some basic concepts of classical plasticity are summarized inSection 2. Section 3 describes the kinematics of the element, which remains as originally proposed in [17,18],
except that deformations are purely plastic. The bulk of the paper consists of Section 4, computing the
power of dissipation for the rigid–plastic TRIC element, Section 5, formulating the discrete limit analysis
problem and outlining the solution strategy, and Section 6, where some computational aspects, specific of
this study, are discussed. Finally, in Section 7 some examples are presented, which seem sufficient to es-
tablish that the ‘‘marriage’’ between TRIC and sequential limit analysis is a successful one.
2. Summary of basic results
Limit analysis deals with rigid–perfectly plastic materials. Such a constitutive model assumes that
stresses are confined within the convex domain
uðrÞ ¼ f ðrÞ � r0 6 0; ð2:1Þwhere u is the yield function (regular for simplicity) and r0 a yield limit. Deformations cannot occur as longas u < 0, while plastic flow may develop when equality holds. In this case, strain rates obey the normality
rule
e ¼ ouor
k; kP 0: ð2:2Þ
In the equations above, r denotes the stress tensor, while e (as other geometric quantities) refers to rates.
Eq. (2.2) might impose some restrictions on strain rates, by confining them within a (convex) domain De,
the subspace spanned by the outward normals to the yield surface (typically, for von Mises� conditionplastic flow is isochoric and De is the deviatoric subspace). The inclusion e 2 De defines the plastically
admissible set for strain rates.
It is possible to associate to any e 2 De a function bDDðeÞ, known as power of dissipation (per unit volume)
and defined by Hill�s maximum principle asbDDðeÞ ¼ rðeÞ : e ¼ maxr
r : e subject to uðrÞ6 0: ð2:3Þ
The value rðeÞ of r solving the problem above is a stress state associated to e through the normality law,
uniquely defined if the domain uðrÞ6 0 is strictly convex. When the domain is convex but not strictly so,
rðeÞ may not be unique, but the power of dissipation still is a uniquely defined function of strain rates. Suchfunction is convex and positively homogeneous of degree one. Hence
bDDðeÞ ¼ rðeÞ : e ¼obDDoe
: e ) rðeÞ ¼obDDoe
: ð2:4a;bÞ
Eq. (2.3) implies Drucker�s inequality ðrðeÞ � rÞ : eP 0 for all r such that uðrÞ6 0. When imposed for allplastically admissible strain rates, the inequality enforces compliance with the admissible domain for
stresses, i.e.
ðrðeÞ � rÞ : e ¼ obDDoe
� r
!: eP 0 8e 2 De ) uðrÞ6 0: ð2:5Þ
Therefore, bDDðeÞ completely describes the behavior of a rigid–perfectly plastic material: if its expression is
known, the yield function needs not to be defined explicitly.
The limit analysis problem considers a rigid–perfectly plastic solid subject to body forces kF on its
volume X and surface tractions kf on the free portion oFX of its boundary. The constrained boundary oUX

3750 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
is fixed. Loads are defined as basic values F and f, affected by a load multiplier k, and the value s of k forwhich collapse is attained (collapse multiplier) is sought. The kinematic theorem of limit analysis states that
s is the optimal value of the minimum problem
s ¼ mine;u
ZX
bDDðeÞdX ð2:6aÞ
subject to
e ¼ rSu in X; u ¼ 0 on oUX; ð2:6b;cÞe 2 De in X; ð2:6dÞ
PðuÞ ¼ZXF � udXþ
ZoFX
f � udðoXÞ ¼ 1: ð2:6eÞ
Eq. (2.6b,c) express compatibility, associating to a velocity field u, vanishing on the constrained boundary,
the consequent strain rate distribution (rSu is the symmetric part of the velocity gradient). Eq. (2.6d)establishes the plastically admissible nature of strain rates and together with the compatibility conditions
defines a mechanism. PðuÞ denotes the power of basic loads, which Eq. (2.6e) normalizes to unity.
The minimum problem (2.6) is a classical and well-known result. Nevertheless, a proof of the statement
is useful for future developments and is now outlined. Let Eqs. (2.6b) and (2.6e) be enforced in weak form
by writing
Lðe; u; r; jÞ ¼ZX
bDDðeÞ�
� r : ðe�rSðuÞÞdX� jð1�PðuÞÞ�; ð2:7aÞ
where rðxÞ and are Lagrangean multipliers. Then, the optimality condition reads [20]
dLP 0 ð2:7bÞsubject to
e 2 De in X; u ¼ 0 on oUX: ð2:7c;dÞ
The inequality reflects the non-stationary nature of the problem, due to the fact that bDDðeÞ is not differ-
entiable when e ¼ 0. However, L is differentiable with respect to all other variables and Eq. (2.7b) must
hold as an equality when variations with respect to them are taken. When referred to the Lagrangean
multipliers, the condition enforces the constraints (2.6b), (2.6e). By imposing that L be stationary with
respect to u one obtains
duL ¼ZXr : dðrSuÞdX� j
ZXF � dudX
�þZoFX
f � dudðoXÞ�
¼ 0 8du ¼ 0 on oUX: ð2:8Þ
On the other hand, when e is varied dL is not necessarily zero and the condition reads
deL ¼ZX
dbDD�� r : de
�dXP 0 8de such that eþ de 2 De ð2:9Þ
It is now necessary to distinguish between the regions Xp, where plastic flow actually develops, and Xr,
which keeps rigid. In the first bDD is differentiable and (2.9) holds as an equality. Since dbDD ¼ ðobDD=oeÞ : de andbecause of Eq. (2.4b), one obtains
r ¼ rðeÞ in Xp: ð2:10aÞ
In Xr it is e ¼ 0, bDD ¼ 0 and, hence, dbDD ¼ bDDðdeÞ ¼ rðdeÞ : de, rðdeÞ being the stress associated to variations dethrough normality. Then, Eq. (2.9) establishes
rðdeÞ�
� r�: deP 0 8de 2 De in Xr: ð2:10bÞ

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3751
By interpreting the Lagrangean multiplier field rðxÞ as a stress tensor, it is easily recognized that Eq. (2.8)
enforces equilibrium under the basic loads multiplied by j and that Eqs. (2.10) imply uðrÞ6 0 throughout
(with equality holding in Xp). Thus, the optimal value of j is a load multiplier which is statically admissible,
or safe. In addition, it coincides with the optimal value of problem (2.6): in fact, by using the principle of
virtual velocities and relations holding at solution (either a priori constraints or optimality conditions) one
can write (a star marks values at solution)
j� ¼ j�Pðu�Þ ¼ZXr� : e� dX ¼
ZX
bDDðe�ÞdX ¼ s: ð2:11Þ
3. The TRIC element
3.1. Geometrical description
TRIC is a triangular shell element with three nodes and six degrees of freedom per node. Its vertices are
numbered from one to three and edges are labeled as a, b, and c (Fig. 1(a)). The length of each side is
denoted by ‘k, k ¼ a; b; c. A local Cartesian reference system (x; y; z) is introduced, with origin in the ele-ment centroid and z ¼ 0 coinciding with the element mid-plane. The coordinates of the nodes are indicated
with ðxi; yiÞ, i ¼ 1; 2; 3.The position of a point on the mid-plane can also be expressed in terms of triangular coordinates Li,
i ¼ 1; 2; 3 (L1 þ L2 þ L3 ¼ 1, Fig. 1(b)), related to x and y through the relations
L1 ¼1
2Xða1 þ b1xþ c1yÞ; L2 ¼
1
2Xða2 þ b2xþ c2yÞ; L3 ¼
1
2Xða3 þ b3xþ c3yÞ; ð3:1Þ
where X is the element area and
a1 ¼ x2y3 � x3y2; a2 ¼ x3y1 � x1y3; a3 ¼ x1y2 � x2y1; ð3:2aÞ
b1 ¼ y2 � y3; b2 ¼ y3 � y1; b3 ¼ y1 � y2; ð3:2bÞ
c1 ¼ x3 � x2; c2 ¼ x1 � x3; c3 ¼ x2 � x1: ð3:2cÞThe following geometrical relations are easily established and will be used in the sequel:
2X ¼ ðb1c2 � b2c1Þ ¼ ðb2c3 � b3c2Þ ¼ ðb3c1 � b1c3Þ; ð3:3aÞ
Fig. 1. The TRIC element.

3752 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
cos a ¼ x3 � x2‘a
¼ c1‘a; cos b ¼ x1 � x3
‘b¼ c2
‘b; cos c ¼ x2 � x1
‘c¼ c3
‘c; ð3:3bÞ
sin a ¼ y3 � y2‘a
¼ � b1‘a; sin b ¼ y1 � y3
‘b¼ � b2
‘b; sin c ¼ y2 � y1
‘c¼ � b3
‘c; ð3:3cÞ
where a, b, c are the angles indicated in Fig. 1(a).
3.2. Cartesian and natural strains
The Cartesian strain components eij ¼ 12ðsi;j þ sj;iÞ are grouped into two vectors
em ¼ f ex ey exy gt; es ¼ f ezx ezy gt ð3:4a;bÞcollecting membrane and transverse shear contributions. As usual in shell theory, ez is not considered as an
independent variable: its value follows from the constitutive law and the condition rz ¼ 0.
The element properties are established by replacing Cartesian strains with local quantities referred to thenatural element system, defined by the three sides of the triangle. Natural membrane strains em ¼ fea eb ecgtmeasure the change in length of unit segments parallel to the sides, i.e. in the directions indicated as Yk(k ¼ a; b; c) in Fig. 1(b). The rules of tensor calculus express them as functions of Cartesian strains through
the relation
eaebec
8<:9=; ¼
cos2 a sin2 a 2 cos a sin acos2 b sin2 b 2 cos b sin bcos2 c sin2 c 2 cos c sin c
24 35 exeyexy
8<:9=;; ð3:5Þ
which can be inverted to give
em ¼ Tmem; Tm ¼ 1
4X2
b2b3‘2a b3b1‘2b b1b2‘2cc2c3‘2a c3c1‘2b c1c2‘2c
b2c3 þ c2b32
‘2ab3c1 þ c3b1
2‘2b
b1c2 þ c1b22
‘2c
26643775: ð3:6Þ
Three components of natural transverse shears are also introduced, collected in vector es ¼ fga gb gcgt.Each component is the shearing strain between segments parallel to one edge and axis z. Simple geometrical
considerations establish
gagbgc
8<:9=; ¼
cos a sin acos b sin bcos c sin c
24 35 ezxezy
� �: ð3:7Þ
As the relation above shows, the three components of vector es are not independent. Nevertheless, when
formulating the element properties, they are considered as such: as explained in detail in [18], this plays a
key role in eliminating locking phenomena at the thin shell limit. Obviously, Eq. (3.7) cannot be inverted as
it is. However, it is possible to solve three systems of two equations, by considering only two rows of the
matrix. For instance, from the first two of them one obtains
ezxezy
� �1
¼ cos a sin acos b sin b
� ��1gagb
� �¼ 1
2X�‘ab2 ‘bb1�‘ac2 ‘bc1
� �gagb
� �or
es1 ¼ Ts1es Ts1 ¼1
2X�‘ab2 ‘bb1 0
�‘ac2 ‘bc1 0
� �: ð3:8aÞ

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3753
By proceeding in the same way with reference to the other couples of rows, one also obtains
es2 ¼ Ts2es Ts2 ¼1
2X‘ab3 0 �‘cb1‘ac3 0 �‘cc1
� �; ð3:8bÞ
es3 ¼ Ts3es Ts3 ¼1
2X0 �‘bb3 ‘cb20 �‘bc3 ‘cc2
� �: ð3:8cÞ
In deriving the expressions for matrices (3.6) and (3.8), use was made of Eqs. (3.3).
3.3. Model for natural strains
According to the kinematics of the shell model, one can express natural strains as
em ¼ gþ zv; es ¼ t: ð3:9a;bÞEq. (3.9a) separates axial from bending contributions in the membrane strain components: g collects the
membrane deformations of the mid-surface and v the natural curvatures. Eq. (3.9b) is just a change of name
for transverse shear strains. Each contribution can be modeled in terms of 15 deformation modes, be-
longing to five groups of three (typical modes are illustrated in Fig. 2), which are now described.
Vector qm ¼ fqma qmb qmcgt collects the axial modes, each corresponding to a change in length of a single
side of the triangle, and governs the mid-plane stretching g. Curvatures are produced by six bending modes,
collected in vectors qSb and qAb, producing transverse displacements, either symmetric or antisymmetric, onone edge of the triangle. Transverse shears are governed by the vector qs ¼ fqsa qsb qscgt of shear modes,
each predicting shearing of one side of the triangular prism, by preserving right angles in the two remaining
sides. Finally, qd ¼ fqd1 qd2 qd3gt is the vector of so-called drilling (or azimuth) modes, involving a rotation
in the plane about a single vertex. In principle, they would contribute to g, but they are supposed not to
affect local fields directly: their presence will be accounted for by means of a fictitious dissipation. Letbqqt ¼ f qtm qtd qtSb qtAb qts g ð3:10Þbe the vector collecting the modes above. Natural strains in the element are modeled as follows:
gðLiÞ ¼ qm ¼ bbbgbqq; bbbg ¼ I 0 0 0 0½ �; ð3:11aÞ
vðLiÞ ¼ a1qSb þ a2ðLiÞqAb ¼ bbbvðLiÞbqq; bbbvðLiÞ ¼ 0 0 a1 a2ðLiÞ 0½ �; ð3:11bÞ
tðLiÞ ¼ a3ðLiÞqs ¼ bbbtðLiÞbqq; bbbtðLiÞ ¼ 0 0 0 0 a3ðLiÞ½ �: ð3:11cÞMatrices an have been constructed in [17,18]. For the sake of completeness, their expressions are given in
Appendix A.
3.4. Natural modes and relations to nodal displacements
The TRIC element has 18 degrees of freedom, three displacements along the Cartesian axes and three
rotations about them at each node (Fig. 3). According to the natural approach introduced by Argyris
[15,16], it is possible to establish a one-to-one relation between nodal displacements U and the set of rigid
body motions and natural deformation modes (or element generalized strains), collected in vectors q and q,
respectively. Symbolically
U ¼ Aq A½ � qq
� �;
� �¼ Cq
C
� �U: ð3:12a;bÞ

u
wv
x
y
z
ϑ
ψ
ϕ
Fig. 3. Nodal degrees of freedom.
Fig. 2. Typical deformation modes.
3754 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
Since six rigid body motions are present, the element has 12 natural modes. As it was discussed in [17,18],
the relevant vector q reads
qt ¼ f qtm qtd qtSb qtA g; ð3:13Þwhere qm, qSb and qd are as defined before and
qA ¼ qAb þ qs; ð3:14Þi.e., antisymmetric bending and shear sum to produce the same natural modes. The relation between vector
q and the vector (3.10) of expanded natural modes bqq can be written as
q ¼ Lbqq; L ¼
I 0 0 0 0
0 I 0 0 0
0 0 I 0 00 0 0 I I
26643775; ð3:15Þ
where I and 0 denote the 3 · 3 identity and null matrices, respectively.

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3755
The second part q ¼ CU of Eq. (3.12b) establishes the compatibility relation for the finite element, byexpressing its generalized strains as functions of nodal displacements (the expression for matrix C, which is
as given in [17], is also reported in Appendix A). By combining this relation with Eq. (3.15), one obtains
Lbqq ¼ CU: ð3:16Þ
3.5. Transformation to global coordinates and assemblage
Eq. (3.16) relates the extended natural modes of an element to its nodal displacements, defined in the
local Cartesian frame. These must be transformed into a global frame and assembled. The operation in-
volves standard finite element procedures and is not discussed here. As a result, the compatibility condition
for each element e can be written symbolically as
Lbqqe ¼ CeU; e ¼ 1; . . . ;N ; ð3:17Þwhere L, the matrix defined in Eq. (3.15), is the same for all elements, bqqe is the vector of extended natural
modes for the element under consideration, Ce is the assembled compatibility operator for element e and U
is the vector of free parameters, i.e., assemblage is meant to enforce not only interelement continuity but
also displacement boundary conditions.
Standard finite element procedures are also employed to construct the vector of nodal forces. Those
equivalent to the basic loads are denoted by R and one can write
PðuÞ ¼ RtU: ð3:18Þ
4. Power of dissipation for the TRIC element
Consider a shell made of von Mises� material. Its power of dissipation per unit volume reads, in Car-
tesian coordinates
bDD ¼ r0
4
3e2x
��þ exey þ e2y þ e2xy þ e2zx þ e2zy
��1=2¼ r0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffietmhmem þ 4
3etses
�s; ð4:1aÞ
with
hm ¼ 2
3
2 1 0
1 2 0
0 0 2
24 35: ð4:1bÞ
The condition that plastic flow be isochoric plays no role, since it merely establishes ez ¼ �ex � ey and
defines the single strain rate component that does not affect the formulation. In other words, any vectors em,es are plastically admissible.
The power of dissipation is expressed in terms of the finite element extended modes by substituting, in
sequence, the relations introduced in the preceding section. In terms of natural strains, one writes
bDD ¼ r0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffietmHmem þ etsHses� �q
: ð4:2aÞ
Matrix Hm is immediately computed by substituting Eq. (3.6) for em, to obtain
Hm ¼ TtmhmTm: ð4:2bÞ

3756 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
To define Hs, the contribution of transverse shear to the power of dissipation is computed as the average of
the values provided by Eqs. (3.8). Namely
4
3etses ¼
4
3
1
3ets1es1�
þ ets2es2 þ ets3es3�¼ 4
9ets Tt
s1Ts1
�þ Tt
s2Ts2 þ Tts3Ts3
�es:
Hence
Hs ¼4
9Tt
s1Ts1
�þ Tt
s2Ts2 þ Tts3Ts3
�: ð4:2cÞ
The procedure is similar to that used in [17] to compute the shear strain contribution to the natural elastic
stiffness of the element. Note that matrix Hs is positive definite for any non-degenerate triangle.
By introducing Eqs. (3.9), the expression (4.2) of the power of dissipation becomesbDD ¼ r0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiAþ Bzþ Cz2
pð4:3Þ
with
A ¼ gtHmgþ ttHst; B ¼ 2gtHmv; C ¼ vtHmv: ð4:4a–cÞThe power of dissipation per unit shell surface is obtained by integrating the expression above over theelement thickness, to obtain
Dðg; v; tÞ ¼ r0
Z t=2
�t=2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiAþ Bzþ Cz2
pdz: ð4:5Þ
D is a function of the point within the element, defined by its triangular coordinates Li ði ¼ 1; 2; 3Þ, andmust be integrated over the element area, to obtain the power of dissipation for the finite element. The
relation reads
De ¼ZXe
DðLiÞdX ¼ r0
ZXe
Z t=2
�t=2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiAþ Bzþ Cz2
pdzdX: ð4:6Þ
The dependence on the point can be made explicit by introducing Eqs. (3.11), expressing the shell gener-
alized strains in terms of the extended natural modes bqqe of the element under consideration. Then
A ¼ bqqtebbbtgHm
bbbg
�þ bbbt
tHsbbbt
�bqqe; ð4:7aÞ
B ¼ bqqtebbbtgHm
bbbv
�þ bbbt
vHmbbbg
�bqqe; ð4:7bÞ
C ¼ bqqtebbbtvHm
bbbv
� �bqqe: ð4:7cÞ
By introducing the matrix
Ke ¼ bbbtgHm
bbbg þ bbbttHsbbbt þ z bbbt
gHmbbbv
�þ bbbt
vHmbbbg
�þ z2bbbt
vHmbbbv; ð4:8Þ
one can write Aþ Bzþ Cz2 ¼ bqqteKebqqe and, hence
De ¼ r0
ZXe
Z t=2
�t=2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffibqqteKebqqe dzdX
q¼ DeðbqqeÞ ð4:9Þ
for all elements e ¼ 1; . . . ;N .
Eq. (4.9) does not consider the effects of drilling modes, which are present in vector bqqe but do not
contribute to matrices bbbk and, hence, to the value of De. Introducing corner rotations as additional

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3757
membrane degrees of freedom is possible, but not straightforward [21,22]. In any case, triangular shellelements with 15 nodal parameters are adequate in most cases and drilling degrees of freedom are required
only to avoid singularities in the assembled matrix for plates or shells with flat portions [23]. Usually, in
elastic formulations, as well as in [17,18] for the TRIC element, drilling modes are given a fictitious natural
stiffness, governed by a parameter small enough to leave the solution unaffected but sufficient to rule out
possible singularities. The same is done here for dissipation: the contribution of drilling modes is taken as
proportional to that of symmetric bending by writing for each element
Dd ¼ r0
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiqtdKdqd
q; Kd ¼ dat1Hma1: ð4:10Þ
The constant d is taken as proportional to an estimate of the average dissipation of a finite element andcomputed as d ¼ kðs�=Nr0Þ, where s� is a reasonable a priori guess of the collapse multiplier and N is the
number of finite elements. The computational experience gained so far indicates that results are unaffected
by values of k ranging from 0.000001 to 0.1.
The contribution above is included in the expression (4.8) of matrix Ke as a 3 · 3 diagonal block. Eq.
(4.9) now defines, in terms of extended natural modes, the power of dissipation for the TRIC element. As
such, it subsumes the constitutive behavior of the rigid–plastic element as a whole. In particular, the vector
bQQeðqÞ ¼oDe
obqqe
ð4:11aÞ
defines extended stress modes at the finite element yield limit and the condition
bqqtebQQeðqÞ
�� bQQe
�¼ bqqt
e
oDe
obqqe
� bQQe
�P 0 8bqqe ð4:11bÞ
enforces compliance with the element yield limit, in analogy with Eq. (2.5). Note that an explicit definition
of the element yield limit is not required.
It must be observed that the condition above merely establishes that stress modes are safe for the finite
element, considered as a constituent of the discrete system. This fact does not imply by itself that stresses
are locally safe in the original (continuous) shell.
5. The discrete limit analysis problem
5.1. Formulation
By virtue of the relations above, the limit analysis problem for the finite element shell model reduces to
the minimum problem
s ¼ minqqe;U
Xe
De bqqeð Þ ð5:1aÞ
subject to
Lbqqe ¼ CeU; e ¼ 1; . . . ;N ; ð5:1bÞRtU ¼ 1; ð5:1cÞ
where Eq. (5.1b) enforces compatibility (boundary conditions are included in the definition of U) and the
counterpart of Eq. (2.6d) does not appear, since any bqqe is plastically admissible. In Eq. (5.1c), R denotes the
vector of nodal forces equivalent to basic loads.
The problem (5.1) is convex, but its objective function is non-smooth and, hence, is not stationary at
solution. Before writing the optimality conditions, it must be observed that De is a global value, referring to

3758 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
a finite element as a whole. In each element, De is either positive and differentiable (when bqqe 6¼ 0) or equal tozero and not differentiable (if bqqe ¼ 0). It follows that the partitioning of X in the two subdomains Xp and Xr
now is replaced by the partition of the set E of the N finite elements into the two subsets Ep of the p6Nelements that undergo plastic flow and Er of the N–p elements that keep rigid in the collapse mechanism.
The Lagrangean function of problem (5.1) reads
L bqqe;U;Qe; jð Þ ¼Xe
De bqqeð Þ �Xe
Qte Lbqqeð � CeUÞ � jðRtU� 1Þ; ð5:2Þ
where vectors Qe ðe ¼ 1; . . . ;NÞ and the scalar j are Lagrangean multipliers. Since L is differentiable with
respect to U, the optimality conditions read
dUL ¼ dUtXe
CteQe
� jR
!¼ 0 8dU; ð5:3aÞ
dqL ¼ dDe � dbqqteL
tQe P 0 8dbqqe; e ¼ 1; . . . ;N ð5:3bÞin addition to the original constraints (5.1b and c). By following the same path of reasoning as in Section 2,
it can be recognized that Eqs. (5.3) establishXe
CteQe ¼ jR ð5:4Þ
and
LtQe ¼oDe
obqqe
if e 2 Ep; ð5:5aÞ
dbqqte
oDe
o dbqqeð Þ
� LtQe
�P 0 8dbqqe if e 2 Er: ð5:5bÞ
If the Lagrangean multiplier vectors Qe are interpreted as the natural (or generalized) stresses of the finite
elements, Eq. (5.4) appears as the equilibrium equation for the discrete shell model. Moreover, the virtual
velocity equivalence Qteqe ¼ bQQt
ebqqe and Eq. (3.15) define the extended stress modes asbQQe ¼ LtQe: ð5:6ÞComparison with Eqs. (4.11) shows that Eqs. (5.5) imply compliance with the yield limit both in plastic and
rigid elements.It can be concluded that the optimal value j� of the Lagrangean multiplier j is a load multiplier which is
statically admissible for the discrete system. Also, the discrete counterpart of Eq. (2.11) reads
j� ¼ j�RtU� ¼
Xe
ZXe
Qte�qe� dX ¼
Xe
ZXe
bQQte�bqqe� dX ¼
Xe
Deðqqe� Þ ¼ s: ð5:7Þ
Note that the optimal value of problem (5.1) defines the collapse multiplier for the discrete system. If a fully
compatible finite element model were used, s would bound from above the collapse multiplier of the
continuous shell. The TRIC element, however, is non-conforming, in that interelement continuity is notenforced completely, and the upper bound nature of the result cannot be a priori assessed.
5.2. Outline of the solution strategy
The procedure employed for the numerical solution is summarized. Let us suppose, for illustration
purposes, that all elements undergo plastic flow, so that L is differentiable everywhere and must be sta-

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3759
tionary at solution. Then, Eq. (5.3b) also hold as equalities and establish oDe=obqqe ¼ LtQe 8e. Because of theexpression (4.9) of the power of dissipation for the finite element, one can write
oDe
obqqe
¼ bHHebqqe; ð5:8aÞ
where
bHHe bqqeð Þ ¼ r0
ZXe
Z t=2
�t=2
1ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffibqqteKebqqe
p Ke dzdX ð5:8bÞ
is a symmetric matrix depending on bqqe, which is present in the square root term. On this basis, the opti-
mality conditions reduce to the system of equationsbHHebqqe ¼ LtQe; e ¼ 1; . . . ;N ; ð5:9aÞ
Lbqqe ¼ CeU e ¼ 1; . . . ;N ; ð5:9bÞXe
CteQe ¼ jR; ð5:9cÞ
RtU ¼ 1: ð5:9dÞThe problem is non-linear because Eq. (5.9a) are so and must be solved by subsequent iterations. At each
iteration j, the conceptually simplest strategy goes through the following steps:
1. Matrices bHHej are evaluated on the basis of the vectors bqqeðj�1Þ computed in the previous step (indications
on the integration procedure are given in Section 6.1).
2. From Eq. (5.9a–c) one obtains, in sequencebqqe ¼ bHH�1ej L
tQe; ð5:10aÞ
Qe ¼ HejCeUðjþ1Þ with Hej ¼ ½L bHH�1ej L
t��1; ð5:10bÞ
HjUðjþ1Þ ¼ jR with Hj ¼Xe
CteHejCe
" #: ð5:10cÞ
3. Eq. (5.10c) is solved for Uðjþ1Þ under the condition (5.9d). This is accomplished by writing
U� ¼ H�1j R; jðjþ1Þ ¼
1
RtU�; Uðjþ1Þ ¼ jðjþ1ÞU�: ð5:11Þ
4. The result is substituted into Eqs. (5.10a and b) to obtain the vectorsbqqej ¼ bHH�1ej L
tHejCeUðjþ1Þ: ð5:12Þ
On this basis, the subsequent iteration can be started.
As Eq. (5.7) establishes, at solution the Lagrangean (load) multiplier j coincides with the value of the
objective function. Therefore, the iteration process terminates when the equality
jjþ1 ffiXNe¼1
DeðbqqejÞ ð5:13Þ
is satisfied to within a prescribed accuracy.

3760 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
As described, the procedure does not consider that often the collapse mechanism entails plastic flow insome elements only. This occurrence is accounted for by means of the device established in previous work,
which is now briefly outlined, referring to [6] for details. The procedure is started with a tentative vector U
defined so as to induce plastic flow in all elements. At each iterative step the dissipation power is computed
separately for each element and when it gets smaller than a prescribed tolerance, the relevant element is
predicted to be rigid in the final mechanism. For that element, generalized strain rates must vanish and only
rigid body motions survive in subsequent computations. The condition
qe ¼ CeU ¼ 0 ð5:14Þprovides some constraints among the components of vector U, which can be replaced by a smaller size
vector U1 by writing U ¼ G1U1. Then, the iteration process is continued with the rigid element ignored and
the operation is repeated whenever the dissipation power of a new element gets sufficiently small. When therth element is predicted as rigid, one writes Ur�1 ¼ GrUr and, hence
U ¼ GrUr with Gr ¼ Gr�1Gr ¼ G1G2 � � �Gr: ð5:15aÞ
Subsequent computations go through the same steps as before, except that U is replaced by the reduced
vector Ur and the matrix in Eq. (5.10c) is replaced by
Hj ¼ Gtr
Xe2Ep
CteHejCe
" #Gr; ð5:15bÞ
where Ep is the current set of plastic elements.The procedure aims at identifying the finite elements which are not involved in the collapse mechanism,
gradually transferring them from the set Ep of plastic elements (initially including all elements) to the
(initially empty) set Er of rigid ones. A sequence of systems with a progressively decreasing number of
elements and of free nodal parameters is thus considered. Each system consists of plastically deforming
elements only, and its dissipation power is stationary at solution.
An inherent limitation of the procedure is that an element cannot be removed from the rigid set Er once
it has been introduced in it. The structure is progressively modified by the addition of constraints and,
whenever this happens, the collapse multiplier of a different structure is searched. Strictly speaking, thesolution obtained should be regarded merely as a kinematically admissible value, bounding from above the
collapse multiplier of the original discrete system. However, the numerical experience gained so far seems to
indicate that no wrong elements enter the rigid set.
5.3. Computation of matrix H
Matrices H and He have the role played, in elastic analyses, by the overall stiffness matrix of the system
and of the natural stiffness matrices of the finite elements. Once the latter are known, H is built by means ofstandard assemblage procedures (the introduction of rigid elements entails minor modifications only).
However, constructing matrices He requires, for each element and for each iteration step, the inversion of
the 15 · 15 matrix bHHe and the subsequent inversion of the 12 · 12 matrix H�1e ¼ L bHH�1
e Lt. It is now dem-
onstrated how this operation can be reduced to a single inversion of a 3 · 3 matrix, with significant com-
putational saving.
Note first that, in the strain model, shear modes are uncoupled from the remaining ones, i.e., matrix bHHe
has the form
bHHe ¼H012�12
012�3
03�12
Hs3�3
24 35 ð5:16Þ

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3761
where Hs is the shear modes contribution. Matrix H0, subsuming the effects of axial, drilling and both
bending modes, is partitioned as follows:
H0 ¼h009�9
h0A9�3
hA03�9
hAA3�3
24 35; ð5:17Þ
where hAA is the contribution of antisymmetric bending (actually, matrix h00 is not full, since the contri-
bution of drilling modes is uncoupled). From Eq. (5.16) one obtains
bHH�1e ¼
H�10
12�12
012�3
03�12
H�1s
3�3
264375:
By virtue of the expression (3.15) of matrix L one writes
H�1e ¼ L bHH�1
e Lt ¼ H�10 þ
09�9
09�3
03�9
H�1s
3�3
24 35: ð5:18Þ
He is obtained by inverting the matrix above, which can be done by exploiting the formula for the inversion
of a modified matrix [24]. This establishes that, given a symmetric matrix
M ¼ M0 þ0 0
0 m
� �; ð5:19aÞ
where
M�10 ¼ a b
bt c
� �ð5:19bÞ
is known, M�1 is computed as
M�1 ¼ M�10 � b
c
� �½p�1 m� bt c
� with p ¼ Iþmc: ð5:19cÞ
Let M ¼ H�1e , which implies, as comparison between Eqs. (5.18) and (5.19a) shows
M0 ¼ H�10 ; m ¼ H�1
s : ð5:20ÞHence M�1
0 ¼ H0 and (see Eqs. (5.19b) and (5.17))
a ¼ h00; b ¼ h0A; c ¼ hAA: ð5:21ÞIt follows p ¼ Iþmc ¼ IþH�1
s hAA. By exploiting the formula for the inverse of a matrix product, one can
also write
p�1m ¼ ½IþH�1s hAA��1
H�1s ¼ ½HsðIþH�1
s hAAÞ��1 ¼ ½Hs þ hAA��1: ð5:22Þ
Hence
He ¼ M�1 ¼ H0 �h0AhAA
� �½Hs þ hAA��1
hA0 hAA½ �
¼ h00 � h0AðHs þ hAAÞ�1hA0 h0A � h0AðHs þ hAAÞ�1
hAAhA0 � hAAðHs þ hAAÞ�1
hA0 hAA � hAAðHs þ hAAÞ�1hAA
� �ð5:23Þ
and only the inversion of the 3 · 3 matrix Hs þ hAA is required to construct He.

3762 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
6. Computational aspects and comments
6.1. Details on the integration procedure
To construct the problem to be solved in each iteration, the integrals (4.5) over the thickness and (4.6),
(5.8b) over the element area must be computed. Numerical integration is spontaneous, but both integrals
involve square root terms, with possible singularities in the integration domain; in this situation, Gauss
integration exhibits poor accuracy even if a certain number of integration points is used.When integrating over the element area the problem has limited relevance. At collapse, most elements
are completely plastic and no singularities show up in the integration domain. The small number of ele-
ments which are partially plastic are located on the boundary between plastic and rigid zones, dissipate little
if at all and contribute marginally to the overall dissipation of the shell, so that possible numerical inac-
curacies do not affect the result. On the other hand, the singularity in the square root in Eq. (4.5) is likely to
occur within the shell thickness and standard numerical integration methods are not adequate.
For homogeneous shells, closed form integration of (4.5) is possible. Note first that, matrix Ke being
positive definite, the equation Aþ Bzþ Cz2 ¼ eðzÞtKeeðzÞ ¼ 0 either has no real roots or two coincidentroots, the latter case occurring if the three components of e simultaneously vanish for the same value of z(not necessarily within the plate). This implies
4AC � B2 P 0: ð6:1ÞIn this situation one has (see, e.g., [25])
D ¼ r0
2Czþ B4C
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiAþ Bzþ Cz2
p�þ 4AC � B2
8CffiffiffiffiC
p arcsinh2Czþ Bffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi4AC � B2
p�t=2�t=2
ð6:2aÞ
with the second term vanishing when Eq. (6.1) holds as an equality and
D ¼ r0tffiffiffiA
pif B ¼ 0; C ¼ 0: ð6:2bÞ
At this point, the integral over the element area of the shell dissipation is written as (constant thickness is
assumed, besides homogeneity)
Deðge; ve; teÞ ¼ZXe
DðA;B;CÞdX; ð6:3Þ
where A, B and C are defined by Eq. (4.4) as functions of ge; ve; te and by Eq. (4.7) in terms of the extended
modes bqqe.
The solution procedure outlined in Section 5 requires the computation, at each iteration step, of matrixbHHe in plastic elements, defined by Eq. (5.8a) so that
oDe
obqqe
¼ bHHebqqe: ð6:4Þ
By exploiting the chain rule for derivatives and by using Eqs. (3.11), one can write
oDe
obqqe
¼ZXe
oge
obqqe
� �toDoge
�þ ove
obqqe
� �toDove
þ ote
obqqe
� �toDote
�dX ¼
ZXe
bbbtg
oDoge
�þ bbbt
v
oDove
þ bbbtt
oDote
�dX: ð6:5Þ
Because of Eqs. (4.4) and (3.11) one also has
oDoge
¼ oDoA
oAoge
þ oDoB
oBoge
¼ 2r0Hm
oDoA
ge
þ oD
oBve
�¼ 2r0Hm
oDoAbbbg
þ oD
oBbbbv
�bqqe; ð6:6aÞ

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3763
oDove
¼ oDoB
oBove
þ oDoC
oCove
¼ 2r0Hm
oDoB
ge
þ oD
oCve
�¼ 2r0Hm
oDoBbbbg
þ oD
oCbbbv
�bqqe; ð6:6bÞ
oDote
¼ oDoA
oAote
¼ 2r0Hs
oDoA
te ¼ 2r0Hs
oDoAbbbtbqqe: ð6:6cÞ
Hence, matrix bHHe reads
bHHe ¼ 2r0
ZXe
oDoA
ðbbbtgHm
bbbg
�þ bbbt
tHsbbbtÞ þ 2
oDoBbbbtgHm
bbbv þoDoCbbbtvHm
bbbv
�dX: ð6:7Þ
Note that the functions A, B and C (and, hence, the derivatives of D with respect to them) are configuration
dependent. At each iteration, their values are computed for the configuration obtained in the previous step.
The integration over the element area of both (6.3) and (6.7) is performed numerically. The use of three
integration points located at Lg ¼ 2=3, Lh ¼ Lk ¼ 1=6 ðg ¼ 1; 2; 3; h 6¼ k 6¼ g 6¼ hÞ, with weights Wg ¼ð1=3ÞXe, turns out to be adequate.
6.2. Antisymmetric bending and transverse shear
The description given in Section 5 outlines the conceptual procedure, but computational convenience
demands some modifications. The construction of matrices He requires the inversion of small (3 · 3) ma-
trices and a few substitutions and matrix products. These operations are not computationally demanding in
themselves, but must be performed for each plastic element at each iteration step. This suggests the search
for approximations reducing the computational burden without jeopardizing the quality of results.
The problem arises from the fact that, as Eq. (3.14) shows, antisymmetric bending and transverse shearscontribute to the same natural modes. This condition may be enforced in an approximate way by writing
qAb ¼ lqA; qs ¼ ð1� lÞqA ð06 l6 1Þ: ð6:8ÞEq. (6.8) assumes that the ratio between bending and transverse shear contributions is the same for each
antisymmetric mode within an element. l is a bending factor, in that l ¼ 1 implies the absence of transverse
shears. If this assumption is introduced, the expression (4.9) of the element dissipation power becomes
De ¼ r0
ZXe
Z t=2
�t=2
ffiffiffiffiffiffiffiffiffiffiffiffiffiqteCeqe
pdzdX; ð6:9Þ
where
Ce ¼K009�9
lK0A9�3
lKA03�9
l2KAA þ ð1� lÞ23�3
Ks
24 35 ð6:10Þ
and matrix Ke is partitioned as bHHe in (5.16) and (5.17), namely
Ke ¼
K009�9
K0A9�3
09�3
KA03�9
KAA3�3
03�3
03�9
03�3
Ks3�3
26643775: ð6:11Þ
The expression (6.9) of De now depends on the bending factor, which appears as an additional parameter,
and the power of dissipation must be minimized also with respect to it. Let us assume that the bending
factor le, constant within each element, has no correlation with the bending factors of adjacent elements.
Then, minimization can be performed separately for each element by writing

3764 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
oDe
ole¼ 2r0
ZXe
Z t=2
�t=2
1ffiffiffiffiffiffiffiffiffiffiffiffiffiqteCeqe
p leqtAðKAA
�þ KsÞqA � ðqtAKsqA � qt0K0AqAÞ
�dzdX
¼ 2r0ðleqtAAqA � qteBqeÞ ¼ 0; ð6:12Þ
where qe was partitioned as suggested by the partitioning Eq. (6.10) of Ce, namely
qte ¼ qt0 qtAf g; qt0 ¼ qtm qtd qtSbf g ð6:13Þand the following matrices were introduced
A3�3
¼ZXe
Z t=2
�t=2
1ffiffiffiffiffiffiffiffiffiffiffiffiffiqteCeqe
p ðKAA þ KsÞdzdX;
B12�12
¼ 1
2
ZXe
Z t=2
�t=2
1ffiffiffiffiffiffiffiffiffiffiffiffiffiqteCeqe
p 09�9
�K0A9�3
�KA03�9
2Ks3�3
24 35dzdX: ð6:14Þ
Note that the matrices above depend on le, affecting the square root terms. At each iteration, they are
computed on the basis of the value obtained in the previous step, so that from Eq. (6.12) one obtains
le ¼qteBqeqtAAqA
: ð6:15Þ
This permits the evaluation of matrices Ce and, hence, the expression of the element dissipation power Eq.
(6.9) directly in terms of the element natural modes qe. The operations described in Section 5.2 for the
solution of each iterative step now become:
1. Compute the matrices
HejðqeÞ ¼ r0
ZXe
Z t=2
�t=2
1ffiffiffiffiffiffiffiffiffiffiffiffiffiqteCeqe
p Ce dzdX ð6:16aÞ
on the basis of the vectors qeðj�1Þ obtained in the previous step and of the value (6.5) of le.
2. Assemble the matrix
Hj ¼Xe
CteHejCe
" #ð6:16bÞ
of the linearized problem HjUðjþ1Þ ¼ jR for the jth step.
3. Solve Eq. (5.10c) for Uðjþ1Þ under the condition (5.9d), by using Eqs. (5.11).
4. Compute the vectors
qej ¼ CeUðjþ1Þ ð6:16cÞ
and go to the subsequent iteration.
6.3. Comparison with the original version of the TRIC element
The formulation presented simply amounts at rephrasing for rigid–plastic behavior that given in [17–19].
To preserve its effectiveness, modifications were reduced as much as possible. However, the different context
demanded some changes, which are now discussed.
To establish comparison, it must be noted that matrices He play the same role as the elastic naturalstiffness of individual elements, whileH corresponds to the stiffness matrix of the assembled discrete system.

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3765
With this in mind, it is immediately recognized that the way of including transverse shear contributions andof accounting for drilling modes are essentially the same. When constructing matrix H some artifice is
required to handle the strain modes qA, containing both antisymmetric bending and transverse shear, which
contribute with a priori unknown fractions. The procedure described in Section 5.3 is different from the
original proposal. However, it does not entail any approximation and the computational burden looks
comparable. Actually, the procedure could be applied for elastic analyses as well, even if advantages are not
evident. In any case, it is worth observing that it does not require that membrane strains due to anti-
symmetric bending be artificially uncoupled from those induced by axial and symmetric bending modes.
The procedure is feasible computationally and was applied in some cases. However, the iterative natureof the solution process requires that matrix H be constructed and the problem solved a number of times.
Moreover matrices, being configuration dependent, must be updated at each step of the iteration process,
motivating the introduction of additional simplifying assumptions. To this end, the exact procedure pre-
sented in Section 5.3 is replaced with that described in Section 6.2. This entails some drastic approxima-
tions, of more or less empirical nature, and their consequences are hard to assess in general terms (in
particular, the assumption of values of le independent in each element entails an additional relaxation of
interelement continuity). A few problems solved with both methods produced negligible differences in the
results. However, it must be observed that, in contrast to the original formulation, only homogeneous shellsare considered here. In this situation, the effects of transverse shears are minor and the bending factors turn
out to be close to unity throughout, drastically limiting interelement discontinuities induced by strongly
different values in adjacent elements. At this stage, it seems too daring state that the approximation is
adequate for laminated shells as well.
7. Numerical examples
7.1. Sequential limit analysis
The procedure, used to trace the post-collapse curves of plates and shells, is as follows. The limit analysis
problem for the rigid–plastic structure is first solved. Besides the value of the collapse multiplier s, thesolution provides the vector U of the nodal velocities corresponding to the collapse mechanism. They are
transformed into displacements by multiplying them by a fictitious time Dt, defined by the condition
maxnodes
kUDtk ¼ �UU ; ð7:1Þ
where �UU is an assigned value. The displacements so obtained are added to the previous nodal coordinates,
to produce the mesh for the subsequent limit analysis problem.
The value of �UU governs the step amplitude. Clearly, the smaller is �UU , the more accurate is the solution.
However, each step solves a standard limit analysis problem, which does not suffer of possible instabilities
such as those experienced by incremental analyses when the response is unstable (decreasing post-collapse
behavior). In other words, the selection of a suitable value is not conditioned by numerical stability re-
quirements and comparatively large steps are adequate in most cases.
To follow the post-critical response, a few problems are to be solved. Moreover, since the mechanismchanges during the evolution, each problem must be started from scratch, with all elements potentially
deformable. This raises the question of computational efficiency, in particular of the convenience of
eliminating rigid elements. Whenever a new element is found to be rigid, the rigidity constraints must be
enforced, which entails additional computations. However, after few iterations the number of plastic ele-
ments is decreased noticeably and the solution speeds up significantly. The procedure assumes that the
elimination of rigid elements is legitimate within a single step. Again, each step involves a standard limit

3766 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
analysis solution and, as it was discussed at the end of Section 5.2, such an expedient, even if hard to justifyon a theoretical ground, can be considered correct on the basis of computational experience.
Several problems, referring to plates and shells of various shape and subject to different loading, were
solved and complete results are discussed in detail in [26]. Only two of them are presented here to dem-
onstrate the effectiveness of the proposed model and solution procedure.
7.2. Simply supported plate
A first set of examples refers to square (side a, thickness t), homogeneous plates, simply supported ontheir boundary and subject to uniform transverse pressure, with basic value
p ¼ 4M0
a2; ð7:2Þ
where M0 ¼ r0t2=4, r0 being the uniaxial yield limit. Thickness variations are accounted for by means of the
slenderness parameter
b ¼ at: ð7:3Þ
The performances of the rigid–plastic version of the TRIC element were tested first by computing the
collapse multiplier of a Kirchhoff plate. The exact solution is not known, but available results bracket itrather stringently within the interval
6:2166 s6 6:256: ð7:4ÞThe first result was obtained numerically by Hodge and Belytschko [27]: even if more than 30 years old, it
was still quoted as the best lower bound available in a comparatively recent collection compiled by Save
[28]. The upper bound corresponds to a finite element solution based on a conforming Kirchhoff element
obtained in [8].Computations were performed with different meshes involving from 8 to 148 elements for a quarter of
plate (24–445 degrees of freedom), on purpose arranged in a rather irregular pattern. As slenderness ratio,
b ¼ 100 was assumed, corresponding to a plate thin enough to make transverse shear effects negligible.
Results converged toward the value s ¼ 6:220, contained in the interval (7.4), which was obtained with the
finest mesh.
It is also of interest to compare the results with those obtained in [8], where the same problem was solved
by using square elements, one based on Kirchhoff model (see [23]), the second resting on Mindlin–Reissner
formulation, with 12 degrees of freedom. Some figures are indicated in Table 1. Obviously, Kirchhoff modelis more efficient and a smaller number of degrees of freedom is required to reach convergence. Results
obtained with the present approach compare favorably with those produced by the Mindlin plate element,
since equivalent meshes give equivalent differences with respect to the converged Kirchhoff value and the
TRIC element appears more flexible. In addition, TRIC applies to any shells, while the Mindlin element
Table 1
Numerical results for the Kirchhoff plate
Degrees of freedom Kirchhoff [8] Mindlin [8] Present
66 6.258
102 6.256
209 6.286
217 6.178
445 6.220
457 6.281

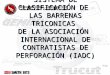
Fig. 4. Collapse multiplier as function of the slenderness ratio.
L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3767
was specifically devised for the problem at hand and hardly can be used in a different context. It must be
observed, however, that the TRIC element is non-conforming and convergence is attained from below.
Therefore, in spite of the kinematic approach used, results cannot be considered as upper bounds.
Values of the slenderness parameter b ranging from 1 to 100 are next considered to assess the element
performances with different transverse shear influence. The computed collapse multipliers are compared in
Fig. 4 with those obtained in [8] with the square Mindlin element and with the following upper bound
estimate
ss ¼6:256 if bP 2:709;4ffiffiffi3
p b if b6 2:709:
8<: ð7:5Þ
The first value refers to a Kirchhoff plate, the second assumes that the plate undergoes a rigid vertical
translation with shear dissipation along its edges only. For thick plates, the collapse multipliers provided by
the TRIC element seem somewhat too low, but results get very good already for b ¼ 4. To this purpose, it
must be observed that b ¼ 1 corresponds to a cube and very small b to solids that hardly can be consideredas plates, even if thick.
The post-collapse behavior of a thin plate is next examined by sequential limit analysis. A quarter of the
plate is discretized with 98 elements, involving 298 degrees of freedom. For comparison, the equivalent
elastic–plastic problem was solved incrementally with the code ABAQUS [29], by employing two of the
available shell elements. The first, labeled as S3R, is triangular and, if the same mesh as for sequential limit
analysis is adopted, gives rise to a problem of comparable size; the second, named S9R5, is definitely more
refined, in that a subdivision into 64 elements produces 1734 degrees of freedom. Table 2 lists the significant
figures for the meshes used in computations. The following geometrical and mechanical properties wereadopted
a ¼ 20 mm; h ¼ 0:2 mm; r0 ¼ 200 MPa; E ¼ 200 GPa; m ¼ 0:3 ð7:6Þ(elastic properties are required by ABAQUS analyses only). The post-collapse curves obtained are depicted
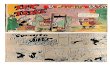
in Fig. 5(a), where the load multiplier is plotted, up to a value more than 30 time the collapse level, versus
the (dimensionless) central displacement. The solid line refers to sequential limit analysis, while elasticplastic solutions are dashed. Curve 1, referring to the S3R triangle, appears exceedingly stiff. A good

0.00 0.05 0.10 0.15 0.20 0.25central displacement / side length
0
40
80
120
load
mul
tiplie
r
β = 100
1
2
in planeconstraints
0.00 0.05 0.10 0.15 0.20 0.25central displacement / side length
0
20
40
60
80
100
120
load
mul
tiplie
r
simplysupported
β = 100
(a) (b)
Fig. 5. Thin plate: post-collapse evolution.
Table 2
Models and solution data for the post-collapse analysis of the square plate
Element type Number of
elements
Nodes Degrees of
freedom
Number of
steps (1)
CPU time (1)
SLA TRIC 98 64 298 15 2300
ABAQUS S3R 98 64 384 47 2900
ABAQUS S9R5 64 289 1734 58 102400
(1) for a maximum displacement of 0.2a.
3768 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
agreement is obtained with curve 2, referring to the S9R5 element, with minor discrepancies arising from
elastic deformations, which sequential limit analysis does not include. However, this result was obtained
with nearly six times as many degrees of freedom, stressing the superiority of the TRIC element. Some data
referring to the number of load increments and to the CPU time required to attain a displacement of 4
mm¼ 0.2a are also included in Table 2 (all computations were performed on the same machine, a PC-
Athlon 1200 MHz processor). It is worth noticing the small number of load steps involved by sequential
limit analysis, which can be taken as an indication of the numerical stability of the method.
Finally, the effect of the in-plane sliding of supports is analyzed, by comparing previous results withthose obtained when in-plane velocities are constrained to be zero on the boundary (Fig. 5(b)). The collapse
multiplier does not change but, as well expected, the post-collapse response is much stiffer initially. The
slope of the curve does not keep increasing because of a sort of compensation between stiffening geometric
effects and the presence of severe membrane forces reducing the bending capacity of the plate.
7.3. Cylindrical shell
A cylindrical shell with the geometric and material properties listed in Table 3 is next examined. Both avertical load and an external pressure are considered. For the first case experimental results are available
and are reported in [13], where the problem was studied by sequential limit analysis, as also done in [14].
Both papers employed finite elements exhibiting polar symmetry. The values of the squash load P0 and of

Table 3
Cylindrical shell properties
Radius (mm) Thickness (mm) Height (mm) r0 (MPa) E (GPa) P0 (kN) PE (kN) �kk
19.5 1.0 25.0 200 200 24.5 760 0.18
Table 4
Cylindrical shell under axial load: features of the finite element models and computation figures (the number of steps and the CPU time
refer to a shortening of 8 mm)
Model Element Notes Method Number of
elements
Degrees of
freedom
P0 (kN) Number of
steps
CPU time
A Axisymmetric SLA 50 148 24.67 29 1500
B Axisymmetric ABAQUS 50 148 24.50 1091 400200
C TRIC Quarter SLA 272 751 24.75 18 5400
D S3R Quarter ABAQUS 272 960 24.50 1529 2301200
E S9R5 Quarter ABAQUS 120 3156 24.45 1475 2501600
F TRIC Whole SLA 400 1081 24.85 18 103100
G S9R5 Whole ABAQUS 200 5046 24.43 1477 4000900
L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3769
the elastic buckling load PE for the axially compressed cylinder are also indicated in Table 3. The di-mensionless parameter �kk ¼
ffiffiffiffiffiffiffiffiffiffiffiffiP0=PE
pgives an indication on the slenderness of the shell and the value of 0.18
states that it is very stocky.
For the axial load case, the different models used in computations are listed in Table 4. Models A and B,
referring to axisymmetric shell elements, were employed in [14] and are reported for the sake of com-
pleteness. Models C–E consider one quarter of the cylinder only, while the two remaining consider the
whole shell, meshed to a slightly lower refinement. The post-collapse curves are depicted in Fig. 6(a) and
(b). The first compares results obtained by sequential limit analysis with those presented in [13] and with
the experimental curve. The latter refers to a considerably longer specimen (height of 155 mm) and, be-cause of this fact and of the boundary constraints induced by the test equipment, comparatively large
Fig. 6. Cylindrical shell under axial load: post-collapse evolution.

Fig. 7. Cylindrical shell under axial load: mechanism evolution up to contact.
3770 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
displacements are present prior to collapse (the complete curve can be found in [13]). However, the processzone is very nearly the same and, as far as the post-collapse response is concerned, comparison is
meaningful. In Fig. 6(a) the post-critical experimental plot was shifted toward left, so as to depart from the
collapse load. Fig. 6(b) compares the curve produced by model C (the most refined mesh with TRIC ele-
ment) with those obtained with incremental analyses by ABAQUS. As for the preceding example, to
match the accuracy of TRIC the rather refined S9R5 shell element is required, involving a considerably
larger number of degrees of freedom. In the presence of an unstable post-collapse response, the superior
stability of sequential limit analysis becomes dramatically evident, as assessed by the significantly reduced
number of steps required and the consequent reduction in computation time (see Table 4). This sub-stantiates the fact that, in contrast to incremental computations, sequential limit analysis is insensitive to
the rising or decreasing nature of the response. Fig. 7(a) illustrates the evolution of the mechanism from
collapse up to contact. The deformed mesh of model C is depicted in Fig. 7(b) for a configuration close to
contact.
Although no alternative results were available for comparison, the investigation was extended to the case
of external pressure, which exhibits a curious aspect: the collapse mechanism and the initial, slightly in-
creasing, post-collapse evolution conform to the polar symmetry of the problem, but at a certain point
deformations concentrate in few narrow zones of the shell, detectable in Fig. 8, and the load drops sud-denly. In the first phase the most significant displacement is the radial component at mid-height; however,
when plastic strain concentrate this quantity becomes meaningless and, for this reason, the post-collapse
curves in Fig. 9 refer to the top edge displacement, measuring the cylinder elongation (vertical displace-
ments are constrained to be zero at the bottom and to have the same value at the top). The cylinder actually
elongates, because of two effects more than compensating the shortening induced by inflection: the strong
Poisson effect associated to incompressible plastic strains and, for significant inflections, the tension in-
duced by the follower nature of the external pressure.
Three curves are plotted in Fig. 9. Curve 1 is obtained on the basis of axisymmetric elements and isunable to represent strain concentrations: its behavior is only influenced by the relative weights of Poisson
effect, inflection induced shortening and tensile components of follower pressure. Results provided by an

Fig. 8. Cylindrical shell under external pressure: strain concentration (magnification factor 3).
0.0 0.2 0.4 0.6 0.8Top edge displacement (mm)
0
4
8
12
16
Pres
sure
(MPa
)
12
3
1 Axisymmetric2 S.L.A. (TRIC)3 ABAQUS (S9R5)
Fig. 9. Cylindrical shell under external pressure: post-collapse evolution.
L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3771
incremental, elastic–plastic analysis, performed with model G in Table 4, follow the same path up to anelongation of about 0.3 mm, when polar symmetry is abandoned and a sudden local collapse occurs (curve
3, dashed). The sequential limit analysis plot (obtained with model F) has the same qualitative trend, even if
it is shifted upward by about 5% (curve 2). This result is unexpected and, in fact, anomalous, representing
the single significant discrepancy with respect to incremental analyses experienced so far (the discrepancy
does not disappear with mesh refinement). In any case, the departure from polar symmetric behavior is
predicted at the correct elongation level, stressing the need for general shell elements even for axisymmetric
structures.
An additional example, referring to an axially compressed square tube with non-symmetric collapsemechanism and post-collapse evolution, confirms the superior efficiency of the proposed procedure when
dealing with unstable responses. Its description is omitted because of space limitations, but details can be
found in [26,30].

3772 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
8. Conclusions
The procedure proposed in this paper to compute the post-collapse curves of plates and shells appears
robust and reliable. In particular, comparison between sequential limit analysis used in conjunction with the
TRIC element and standard elastic-plastic incremental analyses performed with ABAQUS establishes the
following points:
1. to match the performances of the TRIC element, ABAQUS requires models involving 4–6 times as manydegrees of freedom;
2. the significant reduction in the number of load steps required by the computations, up to a factor of
about 50 when the response is unstable, clearly stresses the superior stability of sequential limit analysis.
Point 1 simply assesses that the modifications introduced to adapt the original TRIC formulation to
the rigid–plastic context do not jeopardize the element performances. The second point is worth a
comment. In a sense, comparison is unfair in that ABAQUS automatically selects the arc length (and,
hence, the step amplitude) and the selection criterion might be too severe. In other words, it is likely thatcomparable results could be obtained with a reduced number of steps if their amplitudes were assigned
by the user, as done with the present approach. In any case, the very fact that ABAQUS algorithm
spontaneously selects an extremely large number of small steps indicates that incremental computations
are, at least potentially, subject to numerical instability problems, a drawback which sequential limit
analysis does not suffer.
The procedure is flexible enough for several extensions to be envisaged. The simplest one refers to
hardening behaviors, which can be included by updating the yield limit on the basis of the amount of plastic
strains developed in the previous steps. Dynamic effects, which play a key role in crash analyses, can also beconsidered by including inertia forces within the framework of rigid–plastic dynamics. These and other
developments are presently under study.
Acknowledgements
This study is a part of the project Molecular level instruments for biomaterial interface design, within the
framework of the Large-Scale Computing program of the Politecnico di Milano. The financial support ofthe Institution is gratefully acknowledged. The finite element code ABAQUS was run at the Department of
Structural Engineering of the Politecnico di Milano under academic license.
Appendix A
The expressions for the natural strain models, Eqs. (3.11), as well as that of the compatibility matrices
Ce, are as in the original formulation of the TRIC element and their derivation is clearly explained in [18].To make the presentation self-contained, they are now cast in the present symbolism and listed, referring to
the paper above for details.
Eq. (3.11a) is obvious, being evident that membrane strains due to axial modes are constant. Natural
curvatures depend on bending modes, governing the transverse (in the z-direction) displacement, which is
expresses as
wðLiÞ ¼1
2ð‘aL2L3qbSa þ ‘bL3L1qSbb þ ‘cL1L2qSbcÞ
þ 1
2ð‘aL2L3ðL2 � L3ÞqbAa þ ‘bL3L1ðL3 � L1ÞqAbb þ ‘cL1L2ðL1 � L2ÞqAbcÞ; ðA:1Þ

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3773
where the two addends correspond to symmetric and antisymmetric bending, respectively. By considering
local coordinates such as Ya, running along side a of the element (Fig. 1(b)), natural curvatures have the
expression
va ¼o2woY 2
a
ðA:2Þ
(and analogous). Then, the chain ruleowoYa
¼X3i¼1
owoLi
oLi
oYaand the relations
oL1
oYa¼ 0;
oL2
oYa¼ � 1
‘a;
oL3
oYa¼ 1
‘a;
oL1
oYb¼ 1
‘b;
oL2
oYb¼ 0;
oL3
oYb¼ � 1
‘b;
oL1
oYc¼ � 1
‘c;
oL2
oYc¼ 1
‘c;
oL3
oYc¼ 0
ðA:3Þ
define the following non-zero matrices in Eq. (3.11b)
a1 ¼
1
‘a0 0
01
‘b0
0 01
‘c
26666664
37777775; a2 ¼
� 3
‘aðL3 � L2Þ � ‘b
‘2aL1
‘c‘2aL1
‘a‘2bL2 � 3
‘bðL1 � L3Þ � ‘c
‘2bL2
� ‘a‘2cL3
‘b‘2cL3 � 3
‘cðL2 � L1Þ
26666664
37777775: ðA:4a;bÞ
As for shearing modes, it can be observed from the relevant representation in Fig. 2 that each of them
implies a linear variation of transverse shear strain rates over the element, with maximum value along a side
and vanishing at the opposite vertex. The expression of matrix a3 in Eq. (3.11c) is
a3 ¼1
4
1� L1 0 0
0 1� L2 00 0 1� L3
24 35: ðA:4cÞ
The coefficient is justified by the fact that vector t collects tensorial strain rate components, one half of the
engineering shear strains, which in turn are one half of the shear mode amplitude (Fig. 2).
The relation (3.12b) between rigid-deformation modes and nodal displacements is considered now. Ateach vertex i ði ¼ 1; 2; 3Þ of the element, the six degrees of freedom are labeled as indicated in Fig. 3. Rigid
body motions consist of three translations and three rotations. The first are
q1 ¼u1 þ u2 þ u3
3; q2 ¼
v1 þ v2 þ v33
; q3 ¼w1 þ w2 þ w3
3; ðA:5aÞ
while rigid rotations about the three axes of the local reference system read
q4 ¼c1w1 þ c2w2 þ c3w3
2X; q5 ¼ � b1w1 þ b2w2 þ b3w3
2X;
q6 ¼b1v1 þ b2v2 þ b3v3 � c1u1 � c2u2 � c3u3
4X; ðA:5bÞ
where ci; bi are the projections of the element sides on the cartesian axes defined by Eqs. (3.2). Eqs. (A.5)
permit the expression of matrix Cq in Eq. (3.12b). The compatibility matrix C is obtained on the basis of thefollowing relations:

3774 L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775
Axial modes
qma
qmb
qmc
8<:9=; ¼
0 0 � cos a‘a
� sin a‘a
cos a‘a
sin a‘a
cos b‘b
sin b‘b
0 0 � cos b‘b
� cos b‘b
� cos c‘c
� sin c‘c
cos c‘c
sin c‘c
0 0
26666664
37777775u1v1u2v2u3v3
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;:
Symmetric bending modes
qSbaqSbbqSbc
8<:9=; ¼
0 0 sin a �cos a �sin a cos a�sin b cos b 0 0 sin b �cos bsin c �cos c �sin c cos c 0 0
24 35#1
u1
#2
u2
#3
u3
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;:
Antisymmetric bending plus shear modes
qAa
qAb
qAc
8<:9=; ¼
0 0 sin a �cos a sin a �cos asin b �cos b 0 0 sin b �cos bsin c �cos c sin c �cos c 0 0
24 35#1 � q4
u1 � q5
#2 � q4
u2 � q5
#3 � q4
u3 � q5
8>>>>>><>>>>>>:
9>>>>>>=>>>>>>;:
Drilling modes
qd1qd2qd3
8<:9=; ¼
w1 � q6
w2 � q6
w3 � q6
8<:9=;:
With the aid of Eqs. (A.5), the relations above permit the construction of the 12 · 18 matrix C, expressing
deformation modes in terms of the element nodal displacements in the local reference system. Matrices Ce
are obtained on this basis, by following the procedure outlined in Section 3.5.
References
[1] H. Huh, W.H. Yang, A general algorithm for limit solutions of plane stress problems, Int. J. Solids Struct. 28 (1991) 727–738.
[2] G.L. Jiang, Nonlinear finite element formulation of kinematic limit analysis, Int. J. Numer. Methods Engrg. 38 (1995) 2775–2807.
[3] Y.H. Liu, Z.Z. Cen, B.Y. Xu, A numerical method for plastic limit analysis of 3-D structures, Int. J. Solids Struct. 32 (1995) 1645–
1658.
[4] S.W. Sloan, P.W. Kleeman, Upper bound limit analysis using discontinuous velocity fields, Comput. Methods Appl. Mech. Engrg.
127 (1995) 293–314.
[5] R.S. Ponter, K.F. Carter, Limit state solutions based upon linear elastic solutions with a spatially varying elastic modulus,
Comput. Methods Appl. Mech. Engrg. 140 (1997) 237–258.
[6] A. Capsoni, L. Corradi, A finite element formulation for the rigid–plastic limit analysis problem, Int. J. Numer. Methods Engrg.
40 (1997) 2063–2086.
[7] E. Christiansen, K.D. Andersen, Computation of collapse states with von Mises type yield condition, Int. J. Numer. Methods
Engrg. 46 (1999) 1185–1202.
[8] A. Capsoni, L. Corradi, Limit analysis of plates: a finite element formulation, Struct. Engrg. Mech. 8 (1999) 325–341.
[9] R.S. Ponter, P. Fuschi, M. Engelhart, Limit analysis for a general class of yield conditions, Eur. J. Mech. A/Solids 19 (2000) 401–
421.

L. Corradi, N. Panzeri / Comput. Methods Appl. Mech. Engrg. 192 (2003) 3747–3775 3775
[10] E. Christiansen, O.S. Pedersen, Automatic mesh refinement in limit analysis, Int. J. Numer. Methods Engrg. 50 (2001) 1331–1346.
[11] M.R. Horne, W. Merchant, The Stability of Frames, Maxwell, London, 1965.
[12] W.H. Yang, Large deformations of structures by sequential limit analysis, Int. J. Solids Struct. 30 (1993) 1001–1013.
[13] M. Seitzberger, F.G. Rammerstorfer, On the application of the exact Ilyushin yield surface for plastic collapse analysis of shell
structures, in: IASS-IACM 2000, Fourth International Colloquium on Computation of Shells and Spatial Structures, Chania,
Greece, June 2000.
[14] L. Corradi, N. Panzeri, C. Poggi, Post-critical behavior of moderately thick axisymmetric shells: a sequential limit analysis
approach, Int. J. Struct. Stabil. Dynam. 1 (2001) 293–311.
[15] J.H. Argyris, Continua and discontinua, in: Proceedings of The First Conference on Matrix Methods in Structural Mechanics,
AFFDL, TR 66–88, Dayton, OH, 1966, pp. 11–92.
[16] J.H. Argyris, H. Balmer, J.St. Doltsinis, P.C. Dunne, M. Haase, M. Muller, D.W. Scharpf, Finite element method: The natural
approach, Comput. Methods Appl. Mech. Engrg. 17/18 (1979) 1–106.
[17] J.H. Argyris, L. Tenek, L. Olofsson, TRIC: a simple but sophisticated 3-node triangular element based on six rigid-body and 12
straining modes for fast computational simulations of arbitrary isotropic and laminated composite shells, Comput. Methods Appl.
Mech. Engrg. 145 (1997) 11–85.
[18] J.H. Argyris, M. Papadrakakis, C. Apostolopoulou, S. Koutsourelakis, The TRIC shell element: theoretical and numerical
investigation, Comput. Methods Appl. Mech. Engrg. 182 (2000) 217–245.
[19] J.H. Argyris, M. Papadrakakis, L. Karapitta, Elasto-plastic analysis of shells with triangular element TRIC, Comput. Methods
Appl. Mech. Engrg. 191 (2002) 3613–3636.
[20] P.D. Panagiotopoulus, Inequality Problems in Mechanics and Applications: Convex and Nonconvex Energy Functions,
Birkhouser, Boston, 1985.
[21] D.J. Allman, A compatible triangular element including vertex rotations for plane elasticity analysis, Comput. Struct. 19 (1984) 1–
8.
[22] P.G. Bergan, C.A. Felippa, A triangular membrane element with rotational degrees of freedom, Comput. Methods Appl. Mech.
Engrg. 50 (1985) 25–69.
[23] O.C. Zienckiewicz, R.L. Taylor, The Finite Element Method, McGraw-Hill, London, 1989.
[24] J.S. Prezminiecki, Theory of matrix structural analysis, McGraw-Hill, New York, 1968.
[25] M. Abramowitz, I.A. Stegun, Handbook of Mathematical Functions, Dover, New York, 1972.
[26] N. Panzeri, Post-critical behavior of shells: a sequential limit analysis approach, Ph.D. thesis, Department of Structural
Engineering, Politecnico di Milano, 2001.
[27] Ph.G. Hodge Jr., T. Belytschko, Numerical methods for the limit analysis of plates, Trans. ASME, J. Appl. Mech. 35 (1968) 796–
802.
[28] M. Save, Atlas of Limit Loads of Metal Plates, Shells and Disks, Elsevier, Amsterdam, 1995.
[29] ABAQUS/Standard User�s Manuals, Release 6.1, Hibbit, Karlsson, Sorensen Inc., Pawtucket, RI, USA, 2000.
[30] L. Corradi, N. Panzeri, A triangular finite element for the study of the post-critical behaviour of shells, in: The Sixth International
Conference on Computational Structures Technology, Prague, Czech Republic, 4–6 September 2002, paper CST79 (CD Rom).