Embed Size (px)
Citation preview

Player/Stage: A Unifying Paradigm to Improve
Robotics Education Delivery
Monica Anderson, Laurence Thaete, Nathan Wiegand
The University of Alabama
http://robotics.cs.ua.edu/
Learning to program robots
• Novice student issues– Long learning curve– Hardware access– “Murphy’s law”
• Research student issues– Porting simulations to hardware– Different hardware programming
paradigms

http://robotics.cs.ua.edu/
Opportunity
• Use simulation to teach concepts
• Leverage layering to create a client API that is viable in both simulation and on actual hardware
• Use lower cost platforms to increase accessibility

http://robotics.cs.ua.edu/
Our Approach
• Provide abstraction and simulation via Player/Stage
• Use multiple platforms with different strengths
• Introduce concepts in a controlled manner
http://robotics.cs.ua.edu/
Player/Stage
• Robot control and simulation software [Gerkey01]
• Open source (easily modified and extended)• Supports
– iCreate roombas– Pioneers– Khepera– Others…
http://robotics.cs.ua.edu/
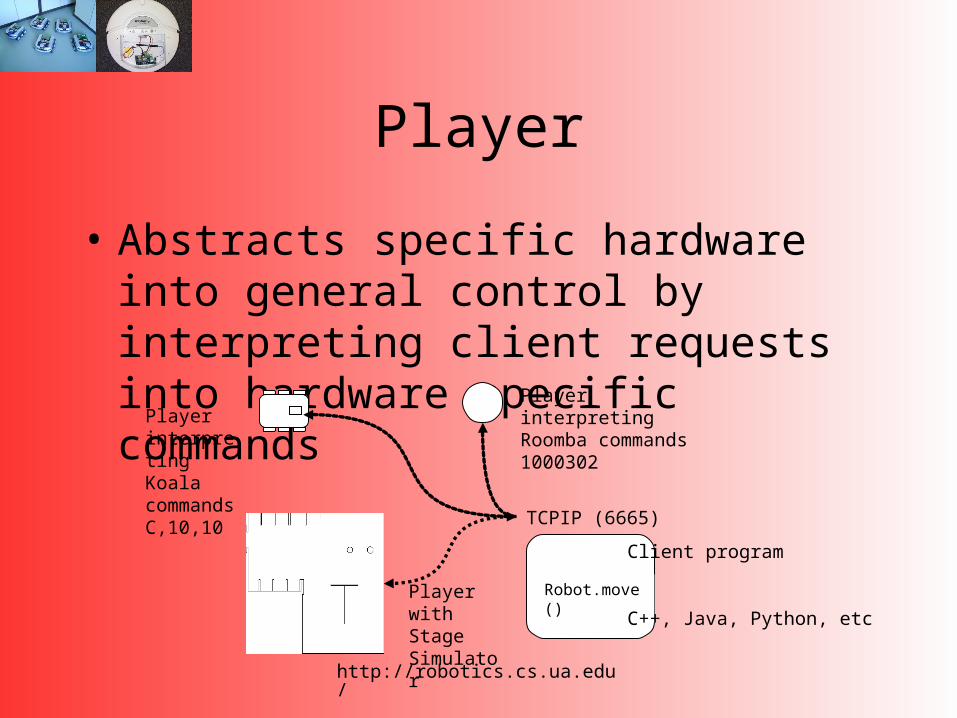
Player
Robot.move()
• Abstracts specific hardware into general control by interpreting client requests into hardware specific commands
TCPIP (6665)
Client program
C++, Java, Python, etc
Player with Stage Simulator
Player interpretingKoala commandsC,10,10
Player interpretingRoomba commands1000302

http://robotics.cs.ua.edu/
Stage/Gazebo
• Simulation component for algorithm testing• Clients ported to hardware with some
“tweaking”
http://robotics.cs.ua.edu/
Research Platform
• K-Team Koala – x86 500Mhz controller– Proximity sensor ring– High fidelity odometry– 802.11 networking for off-board control and
peer communications
http://robotics.cs.ua.edu/
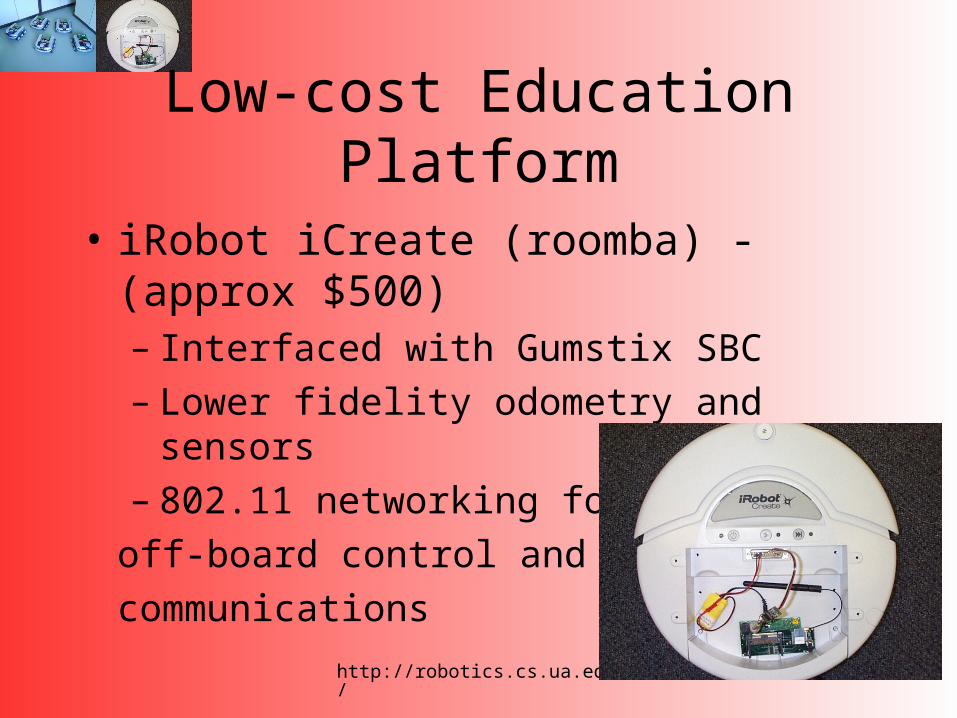
Low-cost Education Platform
• iRobot iCreate (roomba) - (approx $500)– Interfaced with Gumstix SBC– Lower fidelity odometry and sensors– 802.11 networking for
off-board control and
communications

http://robotics.cs.ua.edu/
Logistics
• Player/Stage available on virtual Linux machine
• Simulation assignments completed individually
• Teams of three students on hardware assignments
• Hardware included 5 Koala robots and 10 roomba robots
http://robotics.cs.ua.edu/
Curriculum
• Introduce motor control and sensors iteratively in increasing detail over semester
• Use simulation with and without error coefficients
• Include self-paced hardware workshops during class time (Students are encouraged to help each other)
• Move to hardware-based assignments at about 8 weeks
http://robotics.cs.ua.edu/
Student Projects
• Student designed projects to foster creativity– PenBot - robotic logo
interpreter– Topological navigation – Life sized Pong
“Man vs vision-based player”
QuickTime™ and aYUV420 codec decompressor
are needed to see this picture.

http://robotics.cs.ua.edu/
Summary/Future Work
• Only 2 students dropped (18%) for personal reasons
• Students reported more confidence with hardware after the class
• Students created player clients for roombas (not included in lectures or class assignments)
• More advanced class is being planned that incorporates higher level behaviors such as path planning and mapping

http://robotics.cs.ua.edu/
Questions





























