Embed Size (px)
Citation preview

Players-Econometricians, Adverse Selection, and
Equilibrium.
Jernej Copic ∗
February 14, 2014
Abstract
We study strategic environments of adverse selection, where in an outcome
of strategic interaction players-econometricians observe the distribution over
own payoffs and all players’ actions, and then form assessments regarding the
underlying uncertainty. Tailored to such situations where players may face
recovery problems, we define adverse equilibrium outcomes: players optimize,
their assessments are consistent, and they can justify one-another’s behavior.
We then study the problem from the perspective of an impartial econome-
trician who can only observe the distribution over the actions taken by the
players, and not their types. We define four conditions on the payoff structure
and the strategy profile: positivity, incentive imbalance, pooling, and infor-
mational adversity. These conditions characterize the environments where the
econometrician would reject equilibrium hypothesis if she didn’t take into ac-
count the recovery problem faced by the players.
∗[email protected]. I am grateful to Andy Atkeson, Eddie Dekel, Faruk Gul, Jin Hahn, RosaMatzkin, Romans Pancs, and Bill Zame for helpful discussions, and to my students for encourage-ment. I am also grateful to the UCLA econometrics, macro, and theory-proseminar audiences.
1

JEL codes: C10, C70, D80
Keywords: consistency, recovery, adverse selection, equilibrium, incentives,
information.
1 Introduction
Ever since the publications of Akerlof’s (1970) “Market for Lemons”, Spence’s (1970)
“Job market signaling”, and Rothschild and Stiglitz’s (1976) “Equilibrium in Com-
petitive Insurance Markets”, various literatures have emerged documenting adverse
selection arising from asymmetric information as one of the fundamental problems of
information economics. In a nutshell, adverse selection describes the informational
problem resulting from an equilibrium whereby given the behavior of informed agents
on one side of the market, the uninformed agents on the other side cannot fully de-
duce private characteristics, or types, of the informed agents solely from observations
of what the informed agents do. These problems can be so severe to lead to market
breakdowns, or in the case of Rothschild and Stiglitz (1976), to non-existence of
equilibrium.1
One assumption underlying most of the literature on adverse selection and sig-
naling has been that the agents are nevertheless for some reason able to “know” the
true distribution of characteristics of the informed side of the market. To “know”
is meant in the sense of having a well-formed and accurate prior belief consistent
with the data. The problem is, however, that it is precisely the adverse selection
which might lead uninformed agents to face recovery problems2 regarding the under-
lying objective distribution of characteristics of the other side of the market. This,
in turn, would allow for the uninformed agents to have assessments different from,
1In a general-equilibrium setting, Zame (2007) shows that equilibrium in general exists.2We use the term “recovery”, in the sense of Mass-Colell, Whinston and Green (1995), to not
confuse with the econometric term “identification.” The latter is more general in that it may concernalso the payoff structure and the decision-making model itself, and not just the underlying uncertainparameters as is the case here.
2
yet entirely consistent with the truth (the objective joint distribution over agents’
characteristics), even when one assumes that the dataset at the uninformed agents’
disposal is comprised of infinitely many stationary observations with no additional
noise. In other words, in environments with asymmetric information, the assumption
that in an adverse-selection problem the agents’ assessments equal the truth may be
inconsistent with the informational problem of adverse selection itself.
The purpose of this paper is to address such strategic environments of adverse
selection, and study the problem from the perspective of an impartial econometrician
who can only observe the actions taken by the players, and not the realizations of
their types. The econometrician is thus much like the players themselves, and can
be imagined as one of the players in the game – such a player has no actual effect on
the outcome and a constant payoff function. What is meant by the econometrician’s
observation is an infinite dataset of observations of realizations of players’ actions.
The econometrician can therefore recover the distribution over players’ actions, what
we call the behavioral outcome. The question then is whether this distribution over
players’ actions could have been generated by equilibrium play of players facing the
recovery problem pertinent to adverse selection. That is, to test the equilibrium
hypothesis, under what conditions will the econometrician have to take into account
the recovery problem that such rational players – consistent econometricians face.
The focus of this paper is purely positive.
We provide a tight set of conditions characterizing environments with such re-
covery problems. These conditions pertain only to the underlying payoff structure
and the actual strategy profile that is played. Our main results then derive the
equilibrium outcomes and the corresponding behavior that an econometrician could
observe if these conditions are satisfied. The appropriate definition of adverse equilib-
rium outcomes is more complicated, as it involves an infinite regress of how players
justify all the privately observed parameters as arising from play of such rational
3

players – consistent econometricians.3 The definition of equilibrium is that players’
optimization and consistency of their assessments are common belief. This defini-
tion of adverse equilibrium is precisely tailored to the problem under consideration.
It is devoid of any exogenous assumptions regarding how players make assessments
from the infinite datasets that they are imagined to have accummulated. It is also
rigorously absent of any notion of irrationality or myopia.
Not surprisingly, if the players’ assessments were to coincide, then such equilib-
rium outcomes would be supportable in Bayes Nash equilibrium – the common prior
over uncertainty and strategies could then be imagined as such common assessments.
Of course, in that case, our econometrician would not need the present theory to test
the equilibrium hypothesis. We are therefore primarily interested in situations where
players’ assessments cannot coincide in an adverse equilibrium. Our conditions thus
provide a tight characterization of outcomes where Bayes Nash equilibrium would be
rejected, while adverse equilibrium would in fact be true.
The conditions that we provide here are of incentive- and informational nature.
On the incentive side, we provide two new notions, positivity and incentive imbalance.
A strategy profile is positive if for each player’s type, there is a draw of the other
players’ types such that the player’s strategy is in that state a best reply to the other
players’ strategies. Positivity is therefore an ex-post-type condition on the payoff
structure and the strategy profile. Incentive imbalance is a very simple and intuitive
condition guaranteeing that there is no common assessment of uncertainty, under
which a given strategy profile could simultaneously satisfy the incentive constraints
for all players. These two conditions provide a tight characterization of outcomes
that are not supportable in Bayes Nash equilibria, yet leave open the possibility of
adverse equilibrium with differing players’ assessments. The informational conditions
3Here we use the word “justify” rather than “rationalize” to not confuse such justification withthe standard notion of rationalizability, e.g., Bernheim (1984). As defined here, in such a justifica-tion a player considers not only the others’ possible behaviors but also their probabilistic consistencywith the outcomes of such behaviors.
4

are also pertinent to the payoff structure and the strategy profile, and are called
pooling and informational adversity. These guarantee that in such outcomes players
cannot recover the underlying uncertainty, so that their assessments can be different.
If an outcome satisfies these four conditions then it is not supportable in Bayes Nash
equilibrium, and it is supportable in adverse equilibrium. In two-player games this
characterization is tight.
This paper was inspired by studies in econometric theory, e.g., Manski (1993,
2004). These studies raise a concern as to how an impartial econometrician should
evaluate decision makers’ choices when decision makers face identification problems
(or recovery problems). The difference is that here we study equilibrium problems,
which is quite different, and we do not impose any exogenous identifying assumptions.
Instead, we treat the players’ estimation procedures by which they make their assess-
ments as a black box.4 The only requirement is that such an estimation procedure
satisfies asymptotic consistency, so that each agent can potentially hold a variety of
consistent assessments. Players are here standard expected-utility maximizers, who
play optimally under some such consistent assessment.
The definition of equilibrium here can be viewed as a version of minimal equilib-
rium given in Copic (2014) tailored to players in environments with adverse selection.
Adverse equilibrium can thus be viewed as a stationary steady state of any learning
process with no memory loss, where players make asymptotically consistent estimates
of the data they observe, players optimize, and justify the observed data as arising
from such other players. This definition of equilibrium could then also be viewed as
a refinement of the Self-confirming equilibrium in games with uncertainty, see Dekel
et al (2004). There, players are myopic in the sense that they do not justify their
observations as having arised from play by rational and consistent players. Adverse
equilibrium thus imposes additional constraints. In Section 6 we provide an exam-
4The present paper was also inspired by Anderson and Sonnenschein (1985), who consider ra-tional expectations equilibria of agents using linear econometric models.
5

ple demonstrating that adverse equilibrium outcomes are different from outcomes
that would require justification to any finite order rather than in an infinite regress
(in particular, demonstrating the difference with self-confirming equilibrium, which
requires no justification at all).5 That example also shows that our characteriza-
tion is tight: in such non-adverse-equilibrium outcomes our conditions are no longer
satisfied.
In Section 2 we describe the basic model and the econometric problem. In Sec-
tion ?? we give the definition of adverse equilibrium outcomes and some relationships
to Bayes Nash equilibrium outcomes. In Section 4 we give the incentive and infor-
mational conditions and our main results, theorems 1 and 2. In Section 5 we give
an example illustrating these results and an additional example illustrating how to
incorporate states of fundamentals of the economy in the model. In Section 5 we
discuss some generalizations of our conditions and results, and give the finite-order
example, which shows tightness of the statements of our theorems. Most of the
proofs are in the appendix.
2 The model and the econometric problem
In a game, we define the equilibrium concept, which is suited for studying situations
of adverse selection, i.e., where all players and an econometrician observe the players’
actions in an environment with uncertainty. Since a player’s strategy is a contingent
plan of action, given her private information, each player’s strategy is not directly
observable. What is observed by each player is the joint distribution over the player’s
own payoffs and actions of all players, conditional on the player’s own types. What
5Adverse equilibrium is also related to Self-confirming equilibrium, Fudenberg and Levine (1993),and especially Rationalizable Partition-Confirmed Equilibrium of Fudenberg and Kamada (2013),which is defined in extensive-form games with no uncertainty, allows for correlation in players’strategies, and takes into account players’ trembles. Less related are various notions of conjecturalequilibria, see e.g., Battigalli and Guatoli (1997), and Esponda (2013), and the notions in Jacksonand Kalai (1997) and Jehiel and Koessler (2008).
6

is observed by the econometrician is the behavioral outcome, which is the distribu-
tion over all players’ actions resulting from the underlying uncertainty and players’
contingent strategies. In this section, we begin by defining such environment, and
two benchmark cases, which are closely related to the standard model of Bayes Nash
equilibrium with a common prior.
A game, or the payoff structure, is Γ = {N,A,Θ, u}, where N = {1, ..., n} is
a finite set of players, A = ×i∈NAi is a product of finite sets of players’ actions,
Θ = ×i∈NΘi is the finite set of states of the world, i.e., a product of finite sets of
players’ payoff types, and u : A×Θ→ R|N | is a vector of players’ payoff functions.
The player indexed by n can be interpreted as the state of fundamentals of the
economy, in which case An ≡ {an}, un ≡ const., and in the payoff structure the types
of the other players are interpreted as their signals.6 S is the set of players’ mixed
strategies. Given an s ∈ S, s[θ] ∈ ∆(A) is the probability distribution over players’
actions when the draw of types is θ, and s[θ](a) is the probability of action profile
a, that is, s[θ](a) = ×i∈Nsi[θi](ai). To emphasize that any player can be thought of
also as an econometrician (or statistician), think of the disinterested econometrician
(a passive observer, who records the data) as player n + 1, in which case |Θn+1| =
|An+1| = 1, and un+1 ≡ const, where const is any constant. Γ is assumed to be
6The argument of how this is done is from Copic (2014), and we include it here for the sake ofcompleteness. Interpreting the state of the fundamentals of the economy as a player allows workingwithin the simpler normal-form representation with types alone, while preserving the generalityof the model that includes the states of fundamentals apart from players’ types or signals. The“types” of players 1, ..., n − 1 are then players’ signals, i.e., θi is the signal to player i when thestate of the world is θn, with the appropriate conditional payoff consequences to player i. Underthe usual Bayesian assumption of a common prior over the states of the world and the signalstructure, such signaling model is reducible to the normal-form payoff-type representation in thestandard way: by computing for each player the conditional expected payoffs for each vector ofsignals to all players. When there is no prior (and no common prior), as is the case here, suchstandard procedure is no longer possible, and different assessments may induce different normal-form representations. When the states of fundamentals are included as a “player,” that allows forsuch normal-form representation in the present case as well. This description therefore embeds thepresumably more general model with the states of fundamentals into a reduced-form frameworkwithout having to consider the states of fundamentals in any special way. In such representation,the states of fundamentals are indexed as “player n” rather than 0 because index 0 is here used todescribe the objective outcome. See also our second example in Section 5.
7

common knowledge.
An outcome of Γ is given by (P, s), P ∈ ∆(Θ), s ∈ S, and an outcome realization
is a draw (θ, a) ∼ (P, s); A behavioral outcome is given by a probability distribution
β ∈ ∆(A). Denote by PrP,s ∈ ∆(Θ×A) the probability distribution over types and
actions in an outcome (P, s), so that,
PrP,s(θ, a) = P (θ) s[θ](a), a ∈ A.
Given an outcome (P, s) ∈ ∆(Θ)×S, the behavioral outcome corresponding to (P, s)
is then given by βP,s ≡ PrP,sA , that is,7
βP,s(a) =∑θ∈Θ
P (θ)s[θ](a), a ∈ A.
For each player i, denote by Vi the set of i’s possible payoffs, i.e., Vi ≡ Image(ui),
and let V = ×i∈NVi.
In a game Γ, fix an outcome (P, s) ∈ ∆(Θ) × S, and imagine infinitely many
independent realizations of the outcome (P, s). Let ψ(.) be some statistic of the
outcome (P, s), where ψ maps onto some parameter space Ψ, so that ψ : Θ×A→ Ψ.
An ideal dataset is comprised of infinitely many independent observations of statistic
ψ.
Let P rP,s;T
ψ be the empirical distribution of T independent observations of the
statistic ψ, i.e., T independent realizations ψ(θt, at), t ∈ {1, ..., T}, where (θt, at) ∼
(P, s). Let P rP,s
ψ be the empirical distribution of ψ in the limit, as the number of
observations tends to ∞,
P rP,s
ψ = limT→∞
P rP,s;T
ψ .
7Throughout, the marginal distribution of some probability distribution Pr over a set X isdenoted by PrX , and the conditional is denoted by Pr|X .
8

By the Kolmogorov’s strong law of large numbers,
P rP,s
ψ ≡ PrP,sψ .
Here the statistic ψ will be of the form of a projection onto the parameter space
Ψ. It will then be convenient to use Ψ in the notation. In particular, if ψ(θ, a) =
(θi, a, ui(θ, a)), then Ψ = Θi×A× Vi, and PrP,sψ is then in a slight abuse of notation
simply the marginal probability distribution PrP,sΘi×A×Vi – note that PrP,s is a prob-
ability distribution over Θ × A, which naturally induces a probability distribution
over Θ× A× V .
As mentioned above, we imagine an econometrician simply as player n+ 1. The
econometrician assembles an ideal dataset of observations of statistic ψn+1 of the
outcome (P, s), and then adjudicates whether these observations could have been
generated by equilibrium play. Similarly, all players assemble ideal datasets of ob-
servations ψi, i ∈ N , and form consistent assessments. From such an assessment a
player can then deliberate the optimality of play of herself as well as others.
In the rest of this section we consider two benchmark cases. The first case is one
where ψBNi (θ, a) = (θ, a), so that ΨBNn ≡ Θ×A, ∀i ∈ N∪{n+1}. That is, all players
and the econometrician assemble ideal datasets of complete observations of realiza-
tions of the outcome. In this first benchmark case, as the number of observations
T → ∞, if each player uses any estimation procedure, which satisfies asymptotic
consistency, then it must be that their assessments equal the objective outcome. In
other words, there is no recovery problem as the observations of the realizations of
the outcome are complete.
In equilibrium, players must then optimize relative to the true objective outcome.
Moreover, each player can a fortiori justify the other players’ behavior: a player i
can attribute to player j the assessment over uncertainty given by (P, s), whereby
player j optimizes, and i can further ascertain that j could similarly attribute to any
9

other player k the assessment (P, s), whereby k optimizes, and so on. That is, there
is a common belief that players optimize and their assessments are fully consistent
with (P, s). Since each player’s assessment is (P, s), and each player optimizes, an
equilibrium outcome therefore coincides with a Bayes Nash equilibrium outcome.
In the second benchmark case, ψi(θ, a) = (θ, a), for all i ∈ N , but ψn+1(θ, a) = a,
or equivalently, ψn+1(θ, a) = (θn+1, a, un+1(θ, a)) (recall that a disinterested econo-
metrician only has one type and plays one action). By the same argument as before,
the behavior of players is still supportable in Bayes Nash equilibrium, but the econo-
metrician can no longer necessarily recover the true objective outcome. We can thus
reinterpret Bayes Nash equilibrium to encompass the two benchmark cases.
Given a (P, s) ∈ ∆(Θ)×S, denote by UP,si (θi, ai) the expected utility of player i,
when she is of type θi and plays action ai,
UP,si (θi, ai) =
∑θ−i∈Θ−i,a−i∈A−i
ui(ai, a−i, θi, θ−i)P (θ)×j 6=i sj[θj](aj).
Definition 1. A (P, s) ∈ ∆(Θ)× S is a Bayes-Nash equilibrium outcome, if,
UP,si (θi, ai) ≥ UP,s
i (θi, a′i),
∀ai, a′i ∈ Ai, s.t., si[θ](ai) > 0,∀θi ∈ Θi, s.t., P (θi) > 0, ∀i ∈ N.
A strategy profile s is supportable in Bayes-Nash equilibrium if there exists a P ∈
∆(Θ), such that (P, s) is a Bayes-Nash equilibrium outcome. A behavioral outcome
β ∈ ∆(A) is supportable in Bayes-Nash equilibrium, if there exists a (P, s) ∈ ∆(Θ)×
S, such that, (P, s) is a Bayes-Nash equilibrium outcome, and β = βP,s.
The subject of the next section is the case of interest, where each player also has
the ideal dataset of only partial observations of the outcome, and the econometrician
only observes the behavioral outcome. Then players, too, are facing a problem of
recovering the true outcome (P, s). A player has a greater scope of assessments that
10

are consistent with her observations and she may no longer be certain regarding
the strategy profile of the other players. Therefore, each player also has a greater
scope of assessments that justify each other’s behavior. We now make the formal
construction that corresponds precisely to this situation. From now on we consider
the problem from the perspective of the econometrician so that our focus will be on
what outcomes and consequent behavioral outcomes are supportable in equilibrium.
3 Adverse equilibrium
In the case of interest, apart from observing the other players’ behavior (the distri-
bution over their actions), each player also recovers the probability distribution over
her payoffs for each draw of her type, and for each action that she plays. Therefore,
ΨAEi = Θi×A×Vi, ∀i ∈ N . Since a player’s payoffs may vary with the other players’
types, a player can thus gain some additional information. Instead of focusing on
the statistic ΨAEi , we from now on focus simply on players’ information. Formally,
a player’s information is represented by the σ-algebra of events that she can discern
given the actual strategy profile played – a player can only obtain information from
the outcome realizations that have a positive probability.
Given an outcome (P, s) ∈ ∆(Θ)× s, denote by PrP,sΘi×A(θi, a) the probability of
θi ∈ Θi, a ∈ A, that is,
PrP,sΘi×A(θi, a) = PΘi(θi) si[θi](ai)×j 6=i
∑θj∈Θj
sj[θj](aj)
.
For θi ∈ Θi, a ∈ A, such that, PrP,sΘi×A(θi, a) > 0, let
V P,sθi,a
= {uθi,a(θ−i) | θ−i ∈ Θ−i, PΘi(θi) si[θi](ai)×j 6=i sj[θj](aj) > 0}.
Then, the information of i, conditional on her type θi and action profile a ∈ A, is
11

given by FP,sθi,a, the σ-algebra over Θ× A generated by the events,
{u−1θi,a
(v)× {(θi, a)} | v ∈ V P,sθi,a} ∪ ((Θi × A) \ {(θi, a)})×Θ−i.
For θi ∈ Θi, a ∈ A, such that, PrP,sΘi×A(θi, a) = 0, define FP,sθi,a= {Θ × A, ∅}. The
information of player i in an outcome (P, s) is given by,
FP,si,A = ∧θi∈Θi,a∈AFP,sθi,a.
Definition 2. Given (P, s), (P ′, s′) ∈ ∆(Θ) × S, (P ′, s′) is i − A-consistent with
(P, s), if,
∑(θ,a)∈E
P ′(θ)×i∈N s′i[θi](ai) =∑
(θ,a)∈E
P (θ)×i∈N si[θi], ∀E ∈ FP,si,A .
An assessment (P ′, s′) that is i − A-consistent with (P, s) can be thought of as
an assessment that player i made from her ideal dataset using some asymptotically
consistent procedure. That is, (P ′, s′) is i − A-consistent with (P, s), if and only if,
PrP′,s′
ΨAEi
(E) = PrP,sΨAE
i(E), ∀E ∈ FP,si,A . However, we make no assumption regarding
precisely what procedure a player used – there is no more information that can be
discerned from the ideal dataset barring exogenous assumptions. Thus, there is a
scope of different assessments that are i− A-consistent with (P, s).
Definition 3. For a given θi ∈ Θi, (P, s) satisfies θi-IC, if PΘi(θi) > 0 implies that,
UP,si (θi, ai) ≥ UP,s
i (θi, a′i), ∀ai, a′i ∈ Ai, s.t., si[θ](ai) > 0.
A (P, s) ∈ ∆(Θ)×S is optimal for i, or satisfies i-IC, if (P, s) satisfies θi-IC, ∀θi ∈ Θi.
The description of equilibrium behavior is now slightly more involved. Since
players do not know the underlying distribution over uncertainty, nor other players’
12

strategies, they make assessments regarding the outcome. In order to justify the other
players’ behavior, each player also makes higher order assessments, which describe
assessments that a player imputes on the other players.8 A construct is an infinite
hierarchy of such assessments. A first-order assessment of player i is denoted by
(P (i), s(i)) ∈ ∆(Θ)× S.
For k ∈ N, let Nk be the set of all sequences of length k with elements from
N ; for k = 0, define N0 = ∅. Let Li be the set of all finite sequences of integers
from N , such that the first element is i, and no two adjacent elements are the
same. That is, Li = {` ∈ Nk; k ≥ 1, `1 = i, `m+1 6= `m, 1 ≤ m < k}. Also, let
L = {` ∈ Nk; k ≥ 1, `m+1 6= `m, 1 ≤ m < k}, so that L = ∪i∈NLi. For ` ∈ L, define
first(`) as the first element of `, last(`) as the last element of `.
Let (P 0, s0) ∈ ∆(Θ) × S be the objective outcome. Player i’s construct is a
hierarchy of i’s assessments,
Ci = (P `, s`)`∈Li ∈ [∆(Θ)× S]Li
.
A profile of constructs is given by C = (C1, C2, ...Cn). Given ` ∈ L, first(`) = i,
C(`) = (P (`), s(`)) is i’s `-th order assessment. For example, when ` = (i), C(i) is the
assessment of player i about the outcome (P 0, s0). We adopt the convention that
P ∅ = P 0 and s∅ = s0, so that when ` = ∅, C(`) is the outcome of the game.
An objective outcome (P, s) is an adverse equilibrium outcome if at (P, s) each
player can hold a consistent assessment such that she optimizes, and such that she
can also believe that other players hold consistent assessments under which they
optimize, and so on, ad infinitum. That is, (P, s) is an adverse equilibrium outcome
if it admits a common belief in consistency and optimality.
8Here we define all assessments in the infinite hierarchy only over payoff-relevant uncertainty.This is without loss of generality, see Copic (2014), Theorem 3. As in Copic (2014), the equilibriumhere can be thought of as a stationary steady state of any learning process with no memory loss ofsophisticated rational players.
13

Definition 4. An outcome (P 0, s0) is an adverse equilibrium outcome of Γ if there
exists a supporting profile of constructs C, s.t.,
1. (P `, s`) satisfy j-IC, for j = last(`), for every ` ∈ L,
2. (P (i), s(i)) is i− A-consistent with (P 0, s0), for every i ∈ N , and,
3. (P (`,j), s(`,j)) is j −A-consistent with (P `, s`), for every j ∈ N , for every ` ∈ L.
A strategy profile s0 is supportable in adverse equilibrium if there exists a P (0) ∈
∆(Θ), s.t., (P 0, s0) is an adverse equilibrium outcome.
A behavioral outcome β ∈ ∆(A) is supportable in adverse equilibrium, if there exists
an adverse equilibrium outcome (P 0, s0), s.t., β ≡ βP0,s0 .
We now briefly outline some relevant relationships between the outcomes that
are supportable in adverse equilibrium and the two benchmark cases of the previous
section.
Proposition 1. Let (P 0, s0) be an adverse equilibrium outcome. Then, s0 is sup-
portable in Bayes Nash equilibrium, if and only if, there exists a supporting profile
of constructs C for (P 0, s0), C = (P `, s`)`∈L, such that, (P (i), s(i)) = (P (j), s(j)),
∀i, j ∈ N .
Proof. Let (P 0, s0) be a Bayes Nash equilibrium outcome. Then let (P `, s`) =
(P 0, s0), ∀` ∈ L. This profile of constructs satisfies the requirements of Definition 4.
In particular, (P (i), s(i)) = (P (j), s(j)), ∀i, j ∈ N .
For the converse, let (P 0, s0) be an adverse equilibrium outcome, with (P (i), s(i)) =
(P (j), s(j)), ∀i, j ∈ N . Denote (P (i), s(i)) = (P , s). By the requirement 1 of Definition
4, the outcome (P , s) is a Bayes Nash equilibrium outcome. By the requirement 2,
PΘi≡ P 0
Θiand si ≡ s0
i ,∀i ∈ N . Hence, s ≡ s0, and the claim follows.
Next, we provide a sufficient condition for the first-order assessments from Def-
inition 4 to coincide with the objective outcome. One may call such equilibrium
14

outcomes fully revealing.9 Define a conditionally-generic payoff structure as one
where for each type of each player and for each profile of actions, the payoff to that
player takes a different value for every profile of types of the other players.
Definition 5. Let Vθi,a = {uθi,a(θ−i) | θ−i ∈ Θ−i}. A payoff structure Γ is condi-
tionally generic if uθi,a : Θ−i → Vθi,a, is one-to-one, ∀θi ∈ Θi, ∀a ∈ A, ∀i ∈ N .
Proposition 2. Let the payoff structure Γ be conditionally generic and let (P 0, s0)
be an adverse equilibrium outcome. Then:
1. Every assessment in the supporting constructs from Definition 4 coincides with
the objective outcome, (P `s`) ≡ (P 0, s0),∀` ∈ L.
2. (P 0, s0) is a Bayes Nash equilibrium outcome.
Proof. To prove 1, take an i ∈ N , θi ∈ Θi, and a ∈ A, such that,
PΘi(θi) si[θi](ai)×j 6=i
∑θj∈Θj
sj[θj](aj)
> 0.
Since uθi,a : Θ−i → Vθi,a, is one-to-one, it follows that for each v ∈ Vθi,a, u−1θi,a
(v) =
{θ−i}, for some θ−i ∈ Θ−i. Therefore, FP,sθi,ais generated by the events
{(θi, a)} ∪ ((Θi × A) \ {(θi, a)})×Θ−i,
so that FP,si,A is generated by singletons. Hence, P ∗,iΘ−i|θi = P ∗Θ−i|θi and s∗,i−i ≡ s∗−i.
2 follows from 1 and Proposition 1.
9That is in the tradition of the literature on the Rational Expectations equilibrium, see e.g.,Radner (1982). However, it should be pointed out that that literature assumes a common prior overthe fundamental parameters, or, in the present sense, that economic agents’ assessments coincide.
15

4 Information and Incentive conditions of adverse
equilibrium outcomes
In this section we parse the incentive and informational conditions that describe
equilibrium behavior. Due to the recovery problem, adverse equilibrium outcomes
satisfy weaker conditions than the Bayes Nash equilibrium outcomes. In this main
section of the paper, we address the question under precisely what conditions an
outcome is supportable in adverse equilibrium, while it is no longer supportable in
Bayes Nash equilibrium. Our answer is a characterization of informationally-adverse
environments, that is, environments where due to equilibrium behavior players are
unable to recover the underlying distribution of uncertainty.
Of course, some adverse equilibrium outcomes are still supportable in Bayes Nash
equilibrium– if the econometrician assumed a common prior, she could explain the
players’ behavior even if such assumption wasn’t necessarily true. Other such out-
comes are no longer supportable in Bayes Nash equilibrium but are nonetheless
supportable in adverse equilibrium. Our primary concern are the outcomes of this
latter sort. Those are precisely the outcomes where, if the econometrician assumed
Bayes Nash equilibrium, she would falsely reject the equilibrium hypothesis.
Our first step is to characterize conditions under which a strategy profile s is not
supportable in Bayes Nash equilibrium of Γ but which still leave open the possibility
that s be supportable in adverse equilibrium of Γ. For instance, given a strategy
profile of the other players, a strategy for player i which is not a best reply for any
type draw will evidently not be supportable in Bayes Nash equilibrium of Γ. But such
a strategy of player i will also not satisfy incentive constraints for i. We first provide
a sufficient condition, which guarantees that a strategy profile is not supportable
in Bayes Nash equilibrium of Γ, but which rules out strategies that are never best
replies.
16

Let,
Θs,i = {θi ∈ Θi | ui(θi, θ−i, s′i, s−i)− ui(θi, θ−i, si, s−i) ≤ 0,∀s′i ∈ Si},
and let
Θs,θi = Θs,i ∩ [{θi} ×Θ−i] .
Thus, Θs,i ⊂ Θ is the set of draws of types θ for which i would not have any incentive
to deviate from si to some other strategy s′i, given s−i; and Θs,θi is the section of Θs,i
when player i’s type is θi.
Definition 6. A strategy profile s is positive, if Θs,θi 6= ∅, ∀θi ∈ Θi,∀i ∈ N .
Thus, a positive strategy profile might allow for player i to best-reply to other
players’ strategies if P ∈ ∆(Θ) put sufficient mass on Θs,i.
Proposition 3. If a strategy profile s ∈ S is supportable in Bayes Nash equilibrium
then s is positive.
Proof. If s is not positive, then there is an i ∈ N and a θi ∈ Θi, s.t., ui(θi, θ−i, s′i, s−i)−
ui(θi, θ−i, si, s−i) ≥ 0, ∀s′i ∈ Si. Therefore, no matter the conditional distribution
PΘ−i|θi , when player i is of type θi she would have an incentive to deviate. Thus, s
is not supportable in a Bayes Nash equilibrium of Γ.
The reverse implication is not true: a strategy profile s may be positive and it
may nonetheless not be supportable in Bayes Nash equilibrium.
Proposition 4. If a strategy profile s is not supportable in Bayes Nash equilibrium
of Γ, then for every θ ∈ Θ, there exists an i ∈ N , s.t., ui(θ, s′i, s−i)−ui(θ, si, s−i) > 0.
Proof. If there is a θ ∈ Θ, s.t., ui(θ, s′i, s−i) − ui(θ, si, s−i) ≤ 0, ∀i ∈ N , then set
P (θ) = 1, and s is supportable in a Bayes Nash equilibrium of Γ.
17

Corollary 1. If a strategy profile s is positive and is not supportable in Bayes
Nash equilibrium of Γ, then ∩i∈NΘs,i = ∅.
A sufficient condition for a strategy profile to not be supportable in Bayes Nash
equilibrium must also take into account the magnitude of players’ incentives. To do
that in a tractable way, the sufficient condition we provide here also slightly strength-
ens the necessary condition given by Corollary 1 to empty pair-wise intersections. For
a two-player game, along with the strategy profile being positive, the next condition
is then necessary and sufficient.
Take a game Γ, and suppose s ∈ S is positive. For each θi ∈ Θi, define αθi,s
as the minimal weight that must be assigned to Θs,θi , such that θi-IC may still be
satisfied. Formally,
αθi,s ≡ min{PΘ−i|θi(Θs,θi) | (P, s) satisfies θi − IC}.
Definition 7. A strategy profile s ∈ S is incentive-imbalanced in Γ if, Θs,i ∩Θs,j =
∅,∀i, j ∈ N , and,∑
i∈N1|Θi|
(∑θi∈Θi
αθi,s)> 1.
Proposition 5. Let s be positive and incentive-imbalanced in Γ. Then s is not
supportable in Bayes Nash equilibrium of Γ.
Proof. Assume (s, P ) is a Bayes Nash equilibrium outcome of Γ.
If Θs,i∩Θs,j = ∅,∀i, j ∈ N , this implies that∑
i∈N1|Θi|
(∑θi∈Θi
P|θi(Θs,θi))≤ 1, since
(P, s), satisfies i-IC for all i ∈ N , which is a contradiction.
As an observation, positivity and incentive imbalance together have specific geo-
metric implications on Γ and s. First, in order for a strategy profile to satisfy both
of these properties, it must be that |Θi| > 1, ∀i ∈ N . Otherwise, it is impossible to
simultaneously satisfy Θs,i ∩ Θs,j = ∅, ∀i, j ∈ N , and Θs,θi 6= ∅, ∀θi ∈ Θi, ∀i ∈ N .
Thus, to satisfy both, positivity and incentive imbalance, asymmetric information
must be two sided. Second, for a similar reason, it must be that for some players,
18

Θs,i is not a connected subset of Θ. That is most easily seen when N = 2. Our main
example of Section 5 of course satisfies these geometric properties.
Our next step is to provide conditions, which guarantee that a given strategy
profile s can be supported in adverse equilibrium, while possibly satisfying incentive
imbalance. These conditions must be of informational nature – in conditionally-
generic environments, by Proposition 2 players must in equilibrium correctly recover
the true underlying uncertainty. Then, such an outcome would have to be support-
able in Bayes Nash equilibrium outcome, contradicting Proposition 5. The following
conditions therefore guarantee that in equilibrium players can hold different assess-
ments of uncertainty. We focus on strategy profiles satisfying strong informational
requirements. In Section 6 we indicate to what extent these requirements can be
relaxed.
Given a strategy profile s ∈ S, define for each i ∈ N ,
As,∪i = ∪θi∈Θisupport(si[θi]),
and let As,∪ = ×i∈NAs,∪i .
Definition 8. Take a game Γ and a player i ∈ N . A strategy profile s ∈ S is
pooling for i, if,
ui(θ, ai, a−i) = ui(θ, a′i, a−i),∀ai, a′i ∈ A
s,∪i , ∀a−i ∈ As,∪−i ,∀θ ∈ Θ. (1)
A strategy profile s is pooling if it is pooling for all i ∈ N .
A strategy profile s is pooling for i, if for any profile of actions a−i that other
players play under s, i is for any of her types indifferent between all the actions that
she takes under si. In particular, if one of these actions is optimal for a given θi ∈ Θi,
then all the actions in As,∪i are optimal for θi, and i could play any mixed strategy
over As,∪i , when she is of type θi.
19

Definition 9. Take a game Γ. A strategy profile s ∈ S is informationally adverse,
if,
ui(θi, θ−i, a) = ui(θi, θ′−i, a),∀a ∈ As,∪,∀θi ∈ Θi,∀θ−i, θ′−i ∈ Θ−i,∀i ∈ N. (2)
A strategy profile s is informationally adverse if no player can recover any infor-
mation regarding the conditional distribution over the other players’ types from the
variation in her own payoffs. That is the case when for each of her types and actions
that she takes, her payoffs do not vary with the other players’ types. We can now
provide our main results.
Theorem 1. Take a game Γ and let s ∈ S be positive, pooling, and informationally
adverse.
Then, (P, s) is an adverse equilibrium outcome of Γ, for any P ∈ ∆(Θ).
Combining Theorem 1 and Proposition 5 we obtain the next corollary.
Corollary 2. If in addition to the requirements in Theorem 1, s is incentive im-
balanced, then s is supportable in adverse equilibrium of Γ, and s is not supportable
in Bayes Nash equilibrium of Γ.
The next theorem describes behavioral outcomes that are supportable in adverse
equilibrium but not in Bayes Nash equilibrium.
Theorem 2. A behavioral outcome β∗ ∈ ∆(A) is supportable in adverse equilibrium,
and is not supportable in Bayes Nash equilibrium of Γ, if there exists an outcome
(P, s), s.t., s is pooling, informationally adverse, positive, incentive imbalanced, and
β∗ = βP,sA .
Finally, we have the following proposition.
20

Proposition 6. Suppose that s0 ∈ S is pooling, informationally adverse, and
(s0, P 0) is an adverse equilibrium outcome of Γ. Then, for every P ∈ ∆(Θ) and
s ∈ S, if,
PrP0,s0
A ≡ PrP,sA , (3)
then outcome (P, s) is supportable in adverse equilibrium of Γ. Moreover, for every
P ∈ ∆(Θ), there exists an s satisfying (3).
Proposition 6 is of independent interest. Suppose a certain probability distri-
bution over players’ actions can arise in equilibrium play; An econometrician only
observes the marginal distribution over players’ actions. By the last claim in Proposi-
tion 6, under pooling and informational adversity, econometrician would have no way
of pinning down the underlying objective distribution over Nature’s moves. Hence,
barring the possibility to somehow gather additional information about P 0, there is
little scope for normative prescriptions.
5 Examples
In this section we provide two examples. Our first example illustrates our main
results. The example here is perhaps somewhat more complicated than would be
minimally required. All of the complication is to show the full scope of the results
of Section 4.
Each player i has 2 types, denoted by θi and θ′i, and 3 actions, denoted by ai, a′i,
and a′′i . We will focus on the outcomes where each player puts zero probability mass
on action a′′i , so that the payoffs associated with that action are relevant only in
terms of the deviations from other actions. All payoffs that are not important when
considering deviations from the other actions are chosen to be negative and constant,
equal to −1. The payoff structure is given by the four payoff matrices below.
21

(θ1, θ2) a2 a′2 a′′2
a1 1, 4 2, 4 −1, 6
a′1 1, 0 2, 0 −1, 2
a′′1 0,−1 1,−1 −1,−1
(θ1, θ′2) a2 a′2 a′′2
a1 1, 3 2, 3 −1, 2
a′1 1, 1 2, 1 −1, 2
a′′1 3,−1 4,−1 −1,−1
(θ′1, θ2) a2 a′2 a′′2
a1 2, 4 1, 4 −1, 3
a′1 2, 0 1, 0 −1, 2
a′′1 4,−1 3,−1 −1,−1
(θ′1, θ′2) a2 a′2 a′′2
a1 2, 3 1, 3 −1, 5
a′1 2, 1 1, 1 −1, 3
a′′1 1,−1 0,−1 −1,−1
Consider the strategy profile given by,
si = (si[.](ai), si[.](a′i)) ,
where si[.](ai) + si[.](a′i) = 1, i.e., each player i for each of her types mixes between
ai and a′i.
We first verify that this strategy profile satisfies pooling and informational ad-
versity. The actions that player i plays under s are As,∪i = {ai, a′i}. When player i is
either of type θi or θ′i, for each of her actions, her payoff does not vary with the other
players’ actions, so that s is pooling for both players, i.e., s is pooling. Next, for each
profile of actions a ∈ As,∪, each player’s payoff does not vary with the other players’
types, so that s satisfies informational adversity. Note also that each player i’s payoff
does not vary with her own actions (from As,∪i ), for each of her types, and for each
action played by the other player. Due to pooling and informational adversity, this
is of course a necessary condition for s to be an optimal strategy (but not necessarily
sufficient).
Next, we provide conditions on si[.] under which s is positive. For player 1, posi-
tivity imposes no restricitions on s: for θ1, player 1 has no incentives to deviate from
22

s1 at θ2; for θ′1, 1 has no incentive to deviate at θ′2. Hence Θs,1 = {(θ1, θ2), (θ′1, θ′2)},
with no additional restrictions on s. For player 2, positivity imposes restrictions
on s: at θ2 it can only be that Θ2,θ2 = {(θ′1, θ2)}, and it must additionally be that
s1[θ1](a1) ≥ s1[θ1](a′1); at θ′2 it can only be that Θ2,θ′2 = {(θ1, θ2)′}, and then it must
be that, s1[θ′1](a1) ≥ 2s1[θ′1](a′1). Hence, Θs,2 = {(θ′1, θ2), (θ1, θ′2)}, with the additional
restrictions,
s1[θ1](a1) ≥ s1[θ1](a′1) and s1[θ′1](a1) ≥ 2s1[θ′1](a′1). (4)
In particular, s1[θ1](a1) ∈[
12, 1]
and s1[θ′1](a1) ∈[
23, 1].
To verify incentive imbalance of s, first observe that Θs,1 ∩ Θs,2 = ∅. Next, to
satisfy the incentive constraints of each type, the minimal weight αθi,s on Θs,θi is for
each type given by,
αθ1,s =2
3, (5)
αθ′1,s =
2
3, (6)
αθ2,s =2
1 + 2s1[θ1](a1)∈[
2
3, 1
], (7)
αθ′2,s =
2
3s1[θ′1](a1)∈[
2
3, 1
]. (8)
Thus, ∑i∈N
1
|Θi|
(∑θi∈Θi
αθi,s
)≥ 4
3,
so that as s is incentive imbalanced. Therefore, by Theorem 1 and its Corollary
2, s is supportable in adverse equilibrium and it is not supportable in Bayes Nash
equilibrium. By Theorem 2, the corresponding behavioral outcomes that are sup-
portable in adverse equilibrium are given by β∗, such that its marginal over A1
satisfies β∗A1(a1) ≥ 1
2and β∗A1
(a′′1) = 0, its marginal over A2 satisfies β∗A2(a′′2) = 0 but
is otherwise unrestricted, and β∗ ≡ β∗A1× β∗A2
.
23

Our second example is very simple. It is intended to illustrate how to include the
states of the fundamentals of the economy in the game, even while that is in a way
evident.10 The example also shows the distinction between a Bayes Nash equilibrium
outcome and a strategy being supportable in Bayes Nash equilibrium. In this exam-
ple, there are 2 players, where “player 2” represents the states of the fundamentals
of the economy – player 2 has one “action,” called O, and player 1 has 2 actions, up
or down. Each player has 2 types. The types of player 2 represent the state of the
fundamentals of the economy, and the types of player 1 are the corresponding signals
to player 1. The states are given by the low state θ2 and the high state θ2, and the
corresponding signals to player 1 are θ1 and θ1. For the sake of the example, assume
that the signals are entirely uninformative of the state of the fundamentals, i.e., the
objective distribution P is uniform over Θ. The payoff structure is given by the four
matrices below (const. is any constant),
(θ1, θ2) O
up 0, const.
down 1, const.
(θ1, θ2) O
up 3, const.
down 1, const.
(θ1, θ2) O
up 0, const.
down 1, const.
(θ1, θ2) O
up 3, const.
down 1, const.
This example is therefore effectively a decision problem entertained by player
1. Depending on player 1’s strategy, i.e., the action that she plays for each of her
signals, she may or may not be able to recover the underlying objective distribution
over the uncertainty. In fact, if s∗ ≡ (up,O), then (s∗, P ) is a Bayes Nash equilibrium
10Still, it is important to keep in mind that if signals are purely informational, so that thereis no taste-shock component in the signal, then the player’s preferences depend only on the stateof the fundamentals. One could of course also explicitly include a taste-shock component in thesignal, however, that would be unnecessary as such case could always be represented by simplyadding additional states of the fundamentals with the appropriate conditional distribution over theplayers’ signals.
24

outcome. But if player 1 plays down regardless of her signal, and makes an assessment
that her signals are informative but “pessimistic,” then her incentive constraints
may still be satisfied. Additionally, since in that case for each of her signals, player
1 cannot recover the conditional distribution over Θ2, such assessments can satisfy
1 − A-consistency. For instance, one can set player 1’s assessment over Θ at every
order to P ′,
P ′ θ2 θ2
θ138
18
θ1716
116
We evidently do not have to explicitly consider either the incentives or the assess-
ments of “player 2.” Therefore, the outcome (P, s), where s1 ≡ down, and s2 ≡ O, is
supportable in adverse equilibrium of this game. Here s is also supportable in Bayes
Nash equilibrium, i.e., (P ′, s) is a Bayes Nash equilibrium outcome, while (P, s) is
not. One interpretation of this example is that as a static equilibrium version of
a two-armed bandit problem as in Rothschild (1974). Therefore, player 1 might
not have incentives to ever play the action other than down, due to her consistent
assessments, even while that might have turned out to be beneficial to player 1.
6 Discussion
We now briefly discuss some of the possible extensions of theorems 1 and 2. The main
assumptions in both of these results are the informational assumptions of pooling and
informational adversity. These assumptions guarantee that the players can neither
recover more information due to directly observable action profiles or payoffs, nor
can they recover more information from strategic considerations. These assumptions
are slightly stronger than necessary. For example, informational adversity could
also be partial, in which case a player would not be able to recover the conditional
25

distribution over the other players’ types only for some subset of the other players’
types. Similarly, pooling could be partial, to the extent that there existed at least one
action that were optimal for all types of a player. Then, each player might be able
to partly recover the conditional distribution over the other players’ types from the
behavior of these other players, but there would be some residual recovery problem
– e.g., in a two-player game, the player would be unable to determine which type of
the other player played the one action that all types could play, so that the player
would be unable to invert the observed probability of play of that action. We do not
formally describe these extensions here as that would require a substantial amount
of additional notation and definitions.11
One important point, which we here discuss in some more detail, is that the
informational conditions as given in theorems 1 and 2 must hold across all types (for
all actions that are played). The reason for that can be found in the proofs of these
results: in order for players to be able to justify one-another’s behavior in an infinite
regress, at each level of reasoning, the appropriate (minimal) amount of probability
mass must be assigned to the positive sets of player under consideration. Therefore,
the probability mass must be assigned and reassigned between these different positive
sets in a way that satisfies i−A-consistency. If informational adversity and pooling
do not hold accross all types and actions that are played, then it is no longer possible
to do so ad-infinitum. Thus, while the informational conditions depend only on the
payoff structure and the strategy profile, the reasons why these conditions are as
they are stem from the infinite regress of common belief. We illustrate this with the
following example.12
Consider the game given by the payoff structure below, and consider the strategy
11To write down results analogous to theorems 1 and 2, one would also have to specify conditionssuch that on the set of types where there is no recovery problem, the resulting behavior is sup-portable in Bayes Nash equilibrium. The combination of these conditions is not too difficult butrequires a large amount of additional notation, and the statements themselves are rather lengthy.
12This example is similar to an example in Copic (2012).
26

profile given by s1[θ1] = s1[θ′1] ≡ up and s2[θ2] = s2[θ′2] ≡ R, i.e., player 1 plays up
regardless of her type, and player 2 plays R regardless of her type.
(θ1, θ2) L R
up −2, 2 1, 1
down 0, 0 0, 0
(θ1, θ′2) L R
up −1, 1 0, 2
down −1,−1 2,−3
(θ′1, θ2) L R
up −1, 0 0, 1
down −1,−1 1,−2
(θ′1, θ′2) L R
up −3, 3 0, 2
down −2,−1 −1, 0
It is easily verified that s is positive, where Θs,1 = {(θ1, θ2), (θ′1, θ′2)} and Θs,2 =
{(θ1, θ′2), (θ′1, θ2)}, and that s is incentive imbalanced. Of course, s is also pooling
since each player only plays one action. However, s is not informationally adverse:
it fails for type θ1 of player 1, since u1(θ1, θ2, up,R) = 1 and u1(θ1, θ2, up,R) = 0.
For the sake of the argument assume that the distribution over Nature’s moves
P stacks al the probability mass on type draw (θ1, θ2), i.e., P (θ1, θ2) = 1, so that P
can be represented by the following matrix,
P ′ θ2 θ′2
θ1 1 0
θ′1 0 0
Now we will explicitly construct hierarchies of supporting assessments, to the highest
possible order: at every order, the next order of the supporting assessments will be
“as close” as possible to the previous order. We will show that at some order, it
becomes impossible to simultaneously satisfy θ1-IC and i − A-consistency with the
previous order. Since the assessments in the hierarchy will be as close as possible
to each other, that will imply that the above s cannot be supported in an infinite
27

hierarchy. Since s is such that each player only plays one action, in order for i− A-
consistency to hold, the strategy profile smust here effectively be common knowledge,
i.e., s` ≡ s, ∀` ∈ L. It is therefore enough to specify only the supporting assessments
over Θ.
First, (P, s) satisfies 1-IC but does not satisfy 2-IC, which fails for the type θ2.
We therefore set P (1) = P . To satisfy 2-IC along with 2− A-consistency, P (2) must
assign at least equal probabilities to type draws (θ1, θ2) and (θ′1, θ2), and by 2 − A-
consistency it must assign marginal probability 0 to type θ2. Hence, the following
P (2) is on the boundary of admissible first-order supporting assessments for Player
2,
P (2) θ2 θ′2
θ112
0
θ′112
0
By this same argument, it must be that P (12) = P (2), and by a similar argument,
applied to type θ′1 of player 1, the closest admissible supporting assessment P (21) to
P (2) is given by,
P (21) θ2 θ′2
θ112
0
θ′114
14
Similarly, at order 3, P (121) = P (21), and P (212) is given by,
P (212) θ2 θ′2
θ138
18
θ′138
18
At order 4, P (1212) = P (212), and P (2121) is given by,
28
P (2121) θ2 θ′2
θ138
18
θ′128
28
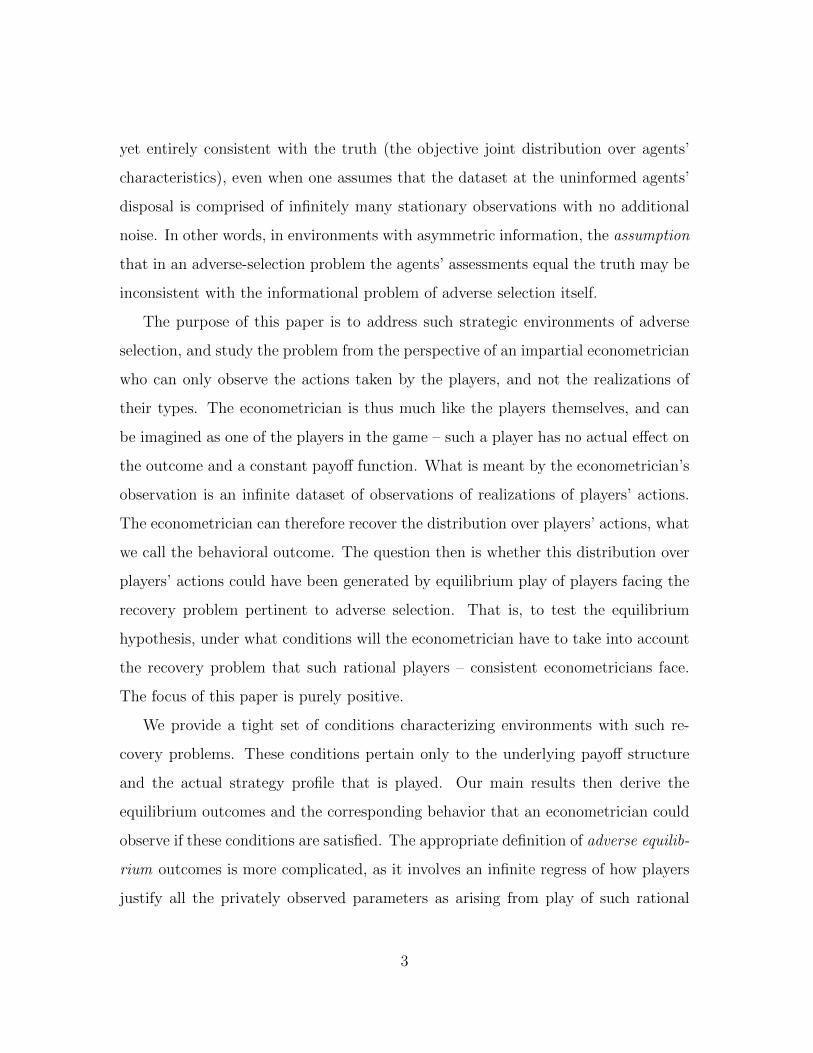
Finally, P (12121) = P (2121), and P (21212) is,
P (21212) θ2 θ′2
θ1516
316
θ′1516
316
However, (P (21212), s) no longer satisfies θ1-IC, and by 1−A-consistency, P(121212)|θ1 ≡
P(21212)|θ1 , so that it is impossible to satisfy θ1-IC at the 6-th order. This shows that
the outcome (P, s) is not an adverse equilibrium outcome of this game. Could it be
that (P ′, s) were an adverse equilibrium outcome for some other P ′? The answer
is no. To see that, observe that in the above construction, in order to satisfy in-
centive constraints, along with A-consistency, the mass in assessments over Θ has
to be “shifted” counter-clockwise. Hence, if under P ′, the draw (θ1, θ2) had a lower
probability, then it would become impossible to satisfy the incentive constraint for
θ1 even at an earlier order in the hierarchy of supporting assessments.
We can modify this example to make the incentive imbalance of the “problematic
type” θ1 arbitrarily small. By doing so, we could construct the supporting hierarchy
up to an arbitrary finite order. This is done is by changing the underlined payoff in
bold type, 2, that player 1 receives when the type draw is (θ1, θ′2), and players play
(down,R), to 1 + ε, for some ε > 0. Take an odd order, 2k − 1, of the assessment
P ` of Player 2, i.e., ` ∈ L2, first(`) = last(`) = 2, and there are k occurences of 2
in `, where P ` is constructed inductively by the above procedure. It can easily be
verified that such P ` is given by,
29

P ` θ2 θ′2
θ12k−1+1
2k+12k−1−1
2k+1
θ′12k−1+1
2k+12k−1−1
2k+1
Hence, given ε, while satisfying i− A-consistency all along the hierarchy, θ1-IC will
continue to hold as long as,
−2k−1 + 1
2k+1+
2k−1 − 1
2k+1(1 + ε) ≤ 0,
which translates into ε ≤ 22k−1−1
. Thus, given an ε > 0, let k be given by
2
2k − 1< ε ≤ 2
2k−1 − 1.
By the above, the outcome (P, s) will then satisfy i−A-consistency and i-IC, i ∈ N ,
exactly up to the order 2k − 1, but no higher order than that.
This example illustrates that if informational adversity fails for one type of one
player, theorems 1 and 2 no longer hold.13 A similar example could be constructed
if the strategy profile s instead failed to satisfy pooling. In that case, a player could
deduce something from the observed distribution over the actions of the other player.
In any case, the point of the example is that as long as for some realization of her
type, a player can recover the conditional distribution over the other players’ types,
that affects how both players can justify each other’s behavior. Then, the reason-
ing by which players could otherwise justify adverse equilibrium outcomes unravels.
Barring the extensions to partial pooling and informational adversity outlined at
the beginning of this section, this example therefore shows that the statements of
theorems 1 and 2 are tight.
13It also provides a clear illustration that adverse equilibrium considered here is stronger thanthe Self-confirming equilibrium in games with uncertainty, c.f., Dekel et. al (2004), under thepresent observational criterion, or feedback function. Namely, the outcome analyzed here is a Self-confirming equilibrim, as that requires 0 orders of justification, but is not an adverse equilibriumoutcome.
30

7 Appendix
We first prove two preliminary lemmas and a proposition.
Lemma 1. Suppose s ∈ S is informationally adverse. Then, for s′ ∈ S, P, P ′ ∈ ∆(Θ),
and i ∈ N , the following are equivalent.
1. (P, s) is i− A-consistent for i with (P ′, s′).
2. PrP,sA ≡ PrP′,s′
A , P ′Θi≡ PΘi
and s′i ≡ si.
3. PrP,sAi|θi ≡ PrP′,s′
Ai|θi , P′Θi≡ PΘi
and s′i ≡ si.
Proof. That 1 implies 2 is obvious, 2 implies 3 because players’ strategies are uncor-
related, and 3 implies 1 by informational adversity.
Lemma 2. Take s ∈ S, P, P ′ ∈ ∆(Θ), i ∈ N , and suppose P ′Θi≡ PΘi
. Then there
exists an s′ ∈ S, such that, PrP′,s′
A−i|θi ≡ PrP,sA−i|θi and s′i ≡ si.
Proof. Let β = βP,sA . For each θi ∈ Θi set s′i[θi] ≡ si[θi], and set s′−i[θ−i] ≡ βA−i,
∀θ−i ∈ Θ−i.
Proposition 7. Let Γ be given, with |Θi| ≥ 2, ∀i ∈ N . Take a P 0 ∈ ∆(Θ) and a
strategy profile s0 ∈ S. Suppose s0 is pooling, informationally adverse, and for every
i ∈ N , there exists an assessment (P (i), s(i)), such that, (P (i), s(i)) satisfies i-IC, and,
(P (i), s(i)) is i− A-consistent with (P 0, s0).
Then (P 0, s0) is an adverse equilibrium outcome of Γ.
Proof. The proof is by induction. The base of induction is true by assumption. So
take a k ≥ 0, and suppose that for every order of assessments ` ∈ L, s.t., |`| ≤ k,
(P (`,i), s(`,i)) is i−A-consistent with (P (`), s(`)), and (P (`,i), s(`,i)) satisfies i-IC, ∀i ∈ N .
Take j 6= i. If there exists a k′ ≤ k, s.t., `k′ = j, then let `′ = `{1,...,k′}; otherwise let
31

`′ = (j). That is, k′ is the index of last previous occurrence in `, if such an occurrence
exists. Now let,
P(`,i,j)Θi|θj ≡ P
(`′)Θi|θj , P
(`,i,j)(θj) ≡ P (`,i)(θj),∀θj, s(`,i,j)j ≡ s
(`′)j ,
and by Lemma 1 and 2, we can set s(`,i,j)i so that (P (`,i,j), s(`,i,j)) is A− j-consistent
with (P (`,i), s(`,i)). Since k′ ≤ k, by inductive assumption, (P (`), s(`)) satisfies IC-j,
which implies that (P (`,i,j), s(`,i,j)) satisfies IC-j.
Proof of Theorem 1. Take a P 0 ∈ ∆(Θ). We will show that there exist assessments
(P (i), s(i)), i ∈ N , such that the requirements of Proposition 7 are satisfied.
Take i ∈ N , θi ∈ Θi, and let P(i)Θ−i|θi be any probability distribution over Θ−i,
s.t., P(i)Θ−i|θi(Θ
s,θi) = αθi,s0, and the incentive constraint for θi is satisfied. Since s0
is positive, such a P(i)Θ−i|θi exists for each θi ∈ Θi. Now set the marginal probability
P(i)Θi
(θi) = P 0Θi
(θi), ∀θi ∈ Θi, and this determines P (i). To define strategy assessments,
set s(i) by applying Lemma 2, and by Lemma 1, (P (i), s(i)) is i − A-consistent with
(P 0, s0), for all i ∈ N . Thus, requirements of Proposition 7 are satisfied.
What remains to be shown is that assessment (P (i), s(i)) satisfies i-IC, ∀i ∈ N .
Take a θi ∈ Θi. Since s0 satisfies pooling for i, and since (P (i), s(i)) is i−A-consistent
(P 0, s0),
∑θ−i∈Θ−i
ui(θi, θ−i; ai, s(i)−i)P
(i)Θ−i|θi(θ−i) =
∑θ−i∈Θ−i
ui(θi, θ−i; ai, s0−i)P
(i)Θ−i|θi(θ−i),
∀ai ∈ As0,∪i . By construction (P (i), s0) satisfies i-IC, and by Lemma 1, As
0,∪i ≡ As
(i),∪i ,
so that (P (i), s(i)) satisfies i-IC.
Proof of Proposition 6. Take P ∈ ∆(P ) and s ∈ S, s.t., PrP,sA ≡ PrP0,s0
A . Take
i ∈ N and θi ∈ Θi. Since (P 0, s0) is supportable in adverse equilibrium, there exists
a (P (i), s(i)), s.t., s(i) satisfies i-IC, and (P (i), s(i)) is i−A-consistent with (P 0, s0), so
32

that in particular, s0i ≡ s(i). Since s0 is informationally adverse,
ui(θi, θ−i, a) = ui(θi, θ−i, a),∀a ∈ As0,∪,∀θ−i, θ′−i ∈ Θ−i.
Hence, by Lemma 1 we obtain,
EPΘ−iEβ−i
ui(θi, θ−i, ai, a−i) = EP ′Θ−iEβ−i
ui(θi, θ−i, ai, a−i), (9)
∀ai ∈ ∆(As0,∪i ),∀β−i ∈ ∆(As
0,∪−i ),∀P ′Θ−i
, P ′′Θ−i∈ ∆(Θ−i). Let β0 = PrP
0,s0
A , define
si[θi] ≡ si[θi], ∀θi ∈ Θi, and define s(i)−i ≡ β∗A−i
. Next let P(i)Θ−i|θi ≡ P
(i)Θ−i|θi ,∀θi ∈ Θi,
and P(i)Θi
= PΘi. By (9), (P (i), s(i)) satisfies i-IC, because (P (i), s(i)) satisfies i-IC, and
(P (i), s(i)) is consistent for i with (P, s). The proof follows from Proposition 7.
Proof of Theorem 2. That β∗ is supportable in a-consistent Nash equilibrium of Γ
follows from Theorem 1 and Proposition 6. Take a (P, s), s.t., PrP,sA ≡ β∗. Since s0
satisfies pooling it follows that s satisfies pooling, which implies that Θs,i = Θs0,i,∀i ∈
N , and consequently s is also incentive imbalanced. Therefore, β∗ is not supportable
in Bayes Nash equilibrium of Γ.
References
[1] Akerlof, G. A. [1970]: “The Market for “Lemons”: Quality Uncertainty and
the Market Mechanism,” Quarterly Journal of Economics, 84, 488 - 500.
[2] Anderson, R. M. and H. Sonnenschein [1985]: “Rational Expectations
Equilibrium with Econometric Models,” Review of Economic Studies, 52, 359 -
369.
33
[3] Battigalli, P. and D. Guatoli [1997]: “Conjectural Equilibria and Ratio-
nalizability in a Game with Incomplete Information,” in Decisions, Games and
Markets, Kluwer Academic Publishers, Norwell, MA.
[4] Bernheim, D. B. [1984]: “Rationalizable Strategic Behavior,” Econometrica,
52, 1007-1028.
[5] Brandenburger, A. and E. Dekel [1993]: “Hierarchies of Beliefs and Com-
mon Knowledge, Journal of Economic Theory 59, 189-198.
[6] Copic, J. [2012]: “Nash equilibrium, rational expectations, and heterogeneous
beliefs: Action-consistent Nash equilibrium,” mimeo.
[7] Copic, J. [2013]: “Two-sided adverse selection,” mimeo.
[8] Copic, J. [2014]: ‘Normal-form Games with Decentralized Rational Statisti-
cians: Moral hazard and Adverse selection,” mimeo.
[9] Dekel E., D. Fudenberg, and D. K. Levine [2004]: “Learning to Play
Bayesian Games,” Games and Economic Behavior, 46, 282303.
[10] Esponda, I. [2013]: “Rationalizable Conjectural Equilibrium: A Framework
for Robust Predictions,” Theoretical Economics, forthcoming.
[11] Fudenberg D. and Y. Kamada [2013]: “Rationalizable Partition-Confirmed
Equilibrium,” mimeo.
[12] Fudenberg D. and D. K. Levine [1993]: “Self-Confirming Equilibrium,”
Econometrica, 61, 523-545.
[13] Harsanyi, J. C. [1967]: “Games with incomplete information played by
‘Bayesian’ players, Part I – III., Part I. The basic model,” Management Sci.,
14, 159 -182.
34
[14] Harsanyi, J. C. [1968a]: “Games with incomplete information played by
‘Bayesian’ players, Part I – III., Part II. Bayesian equilibrium points,” Man-
agement Sci., 14, 320 - 334.
[15] Harsanyi, J. C. [1968b]: “Games with incomplete information played by
‘Bayesian’ players, Part I – III., Part III. The basic probability distribution
of the game,” Management Sci., 14, 486 - 502.
[16] Jackson M. O. and E. Kalai [1997]: “Social Learning in Recurring Games,”
Games and Economic Behavior, 21, 102 - 134.
[17] Jehiel, P. and F. Koessler [2008]: “Revisiting Games of Incomplete Infor-
mation with Analogy-Based Expectations Equilibrium,” Games and Economic
Behavior 62, 533-57.
[18] Manski, C. F. [1993]: “Adolescent Econometricians: How Do Youth Infer the
Returns to Schooling?” Chap. 2 in Studies of Supply and Demand in Higher
Education, edited by C. T. Clotfelter and M. Rothschild. University of Chicago
Press.
[19] Manski, C. F. [2004]: “Social Learning from Private Experiences: The Dy-
namics of the Selection Problem,” Review of Economic Studies, 71, 443 - 458.
[20] Mass-Colell, A., M. D. Whinston and J.R. Green [1995]: Microeco-
nomic Theory, Oxford University Press, New York.
[21] Radner, R. [1982]: “Equilibrium under uncertainty,” Chap. 20 in Handbook
of Mathematical Economics, vol. II, edited by K. Arrow and M. D. Intrilligator.
Amsterdam: North-Holland.
[22] Rothschild, M. [1974]: “A Two-Armed Bandit Theory of Market Pricing,”
Journal of Economic Theory, 9, 185 - 202.
35
[23] Spence, M. [1973]: “Job Market Signaling,” Quarterly Journal of Economics,
87, 355 - 374.
[24] Zame, W. [2007]: “Incentives, Contracts, and Markets: A General Equilibrium
Theory of Firms,” Econometrica, 75,1453 -1500.
36