Embed Size (px)
Citation preview

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 1/43

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 2/43
Background:Background: Why we require piping in plants?
Because they are the conveying systems of the entire units like the
blood vessels in our body.
Why we require stress analysis of piping systems?
To establish the technical viabilities of a particular geometrical layout
of the system in relation with the determination of:
•Support/static/rotating equipment nozzle load/moments
•Stress history of the entire system
•Displacement profile of the system
•Natural frequencies of the entire system (required for any
transient loading)

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 3/43
What are the areas of engineering science required for this
exercise? It requires the knowledge of -
Engineering Mechanics,
Fluid Mechanics,
Mechanics of Materials,
Theory of Structures
Finite Element Methods,
Material Science,
Machine Design,
Theories of Mechanical Vibration,
Instrumentation Engineering,
Process Engineering
Background (contd.):Background (contd.):

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 4/43
What are the activities of piping stress analysis?
Background (contd.):Background (contd.):
Process parameters
fixation
Lay-out Dwg.
P&I Dwg.
Start Civil/Str.
Dwg.
Elect.
Dwg.
Stress Analysis
Results OK ?
Y e s
Stop
No
Downstream Engineering

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 5/43
Different Loading Conditions:Different Loading Conditions: Normally, a piping system can be classified as: (1) Cold Piping
And (2) Hot Piping
The usual loading conditions can be classified as:
(1) Static conditions,which includes:
(a) Self-weight of the piping
(b) Thermal loading conditions
(c) Any static load testing conditions (e.g. hydro-test, steam-out, etc.)
(2) Dynamic conditions, which includes:
(a) Seismic/Earthquake loading conditions
(b) Wind loading
(c) Safety valve blow down, or any transient loading situations

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 6/43
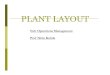
Mechanics of Static loadingConditions: Forces/Moments acting on a piping system depend upon the manner in
which it is supported spatially.
The figure shows a typical spatial
layout of a piping system with its
necessary supporting arrangements
PA
A
SH
PGPRH
PR
T K
- 3 0 3
The first thing we need to know
how to represent the support
forces and moments. For that we
must know the Degree of
Freedom at each support point.

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 7/43
Mechanics of Static loading Conditions:
If we carefully observe we note the equipment nozzle arrests all six
degrees of freedom. Similarly, the degrees of freedom of other supporting systems can be determined and we can draw the following
f b d of the system:
A
X
Y
Z

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 8/43
Mechanics of Static loading Conditions:
The governing equations of equilibrium are:
= ⇒ =
=
=
∑ ∑∑∑
ur r0 ( ) 0
( ) 0
( ) 0
x
y
z
F i F
ii F
iii F
And
( )
( )( )
= ⇒ =
==
∑ ∑
∑∑
uur r0 ( ) 0
( ) 0
( ) 0
A A x
A y
A z
M i M
ii Miii M

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 9/43

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 10/43
Mechanics of Static loading Conditions:
Hence, it is observed that the problem is a Statically Indeterminate one as the
equations of Statics are not alone to solve the problem. Deformation
characteristics of the geometry are required to be taken into account.
The most simple piping configuration which is statically determinate is:
X
Y
Z

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 11/43
How it is taken into account ? Let’s take an example:
Mechanics of Static loading Conditions:
For the above rod, find the support reactions.
Let us solve by starting with its FBD.
L/2 L/2
A B
X
YP
C

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 12/43
Mechanics of Static loading Conditions:
L/2 L/2
R A R B X
Y
Obviously, from force balance, we get:
0 (1)+ + = ⇒ + =− A B A B R R P R R P
P
Now, considering deformation characteristics:
0= = A Bu u
C
Take the segments AC and CB and draw the FBD s:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 13/43
Mechanics of Static loading Conditions:
L/2
R A
C
R A
A
/2δ = − = =− AC A C A C R L
u u u AE
L/2
R A
B
R BP
L/2
R B
B
R B
CC
/2
δ = − =− = B B C B C C
R Lu u u
AE

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 14/43
Mechanics of Static loading Conditions:
Thus eliminating uC , we get:
(2)2 2
= ⇒ = A B A B
R L R L R R
AE AE
Hence from equations (1) and (2), we can say
that: 2
= =− A B P
R R
( )2
∴ = = ← A B P
R R
So we conclude that for statically indeterminate problems,deformation characteristics of the system need to be taken into the
consideration.

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 15/43
Mechanics of Static loading Conditions:
Now, we can formulate what is called as the stiffness method of formulation
of a structural mechanics problem. According to this, for an arbitrary rigid body subjected to various forces (moments), we can write:
F 1 F 2
F n
A1
A2
An
1 11 1 12 2 1
11
....
=
= + + +
= ∑
n n
n
i ii
F k u k u k u
k u
Similarly, 2 21=
= ∑n
i ii
F k u
Or, more generally,
1=
= ∑n
j ji ii
F k u

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 16/43
Mechanics of Static loading Conditions:
In the above expression, k ji represents the stiffness coefficient
and is defined as:
“The force (moment) at node (point) j due to a unitdeflection (rotation) at node (point) i keeping all othernodes fixed”
According to Maxwell-Betti’s reciprocity theorem, we can say:
= ji ijk k

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 17/43
More formally we can express the above results
in matrix format as follows:
Mechanics of Static loading Conditions:
1 11 12 1 1
2 21 22 2 2
1 2
. .
. .
. . . . . . ..
. . . . . . .
. . .
=
n
n
n n n nn n
F k k k u
F k k k u
F k k k u

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 18/43
Or, in compact way:
Mechanics of Static loading Conditions:
{ } [ ] { }=
F k uLet us take an example of a simple prismatic
rod:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 19/43
Mechanics of Static loading Conditions:
L
Rod of area = A
Mod. of Elasticity = E
1 2
u1 u2
Obviously,11 21 12
22
, AE AE
k k k L L
AEk L
= = − =
=

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 20/43
Thus, we can write the stiffness matrix of the rod as:
Mechanics of Static loading Conditions:
1 1
1 1
A Ek
L
−=
−

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 21/43
Mechanics of Static loading Conditions:
What we do with this matrix ? We
Take this equation and solve to write:
{ } [ ] { }1−=u k F
Nodal
Displacements
(rotations)
Nodal Forces (moments)

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 22/43
Mechanics of Static loading Conditions:
Let us solve a simple problem:
For the structure shown,
determine the support reaction
and the displacement of thestructure.
L
Area = 2 A L
P
Area = A
1
2
3

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 23/43
Mechanics of Static loading Conditions:We have identified different nodal points on the structure. We write our equations for the elements:
1
1 1
1 1
A Ek
L
− =
− and:
2
1 1 2 22
1 1 2 2
A E A Ek
L L
− = = −

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 24/43
Mechanics of Static loading Conditions:
Now writing the stiffness for the entire structure:
1
1 1 0
1 1 0
0 0 0
A EK
L
− = −
and:
2
0 0 0
0 2 20 2 2
A EK L
= − −
∴ combing
1 2K K K = +
1 1 0
1 3 20 2 2
A E
K L
−
= − − −

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 25/43
Mechanics of Static loading Conditions:
Note the final stiffness matrix is still symmetric.symmetric. ThusThus
the final equation is:the final equation is:
1
2
3
1
3
1 1 0
1 3 2
0
0
2 2
A E
uL
F u
uF
− − −
−
=
Noting F 1 = P and u3 = 0 we get:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 26/43
Mechanics of Static loading Conditions:
− = − −
−
1
2
3
1 1 0
1 3 20
0 2 2 0
uP A E
uL
F
Solving….
( )1 2
1 2
3 2
3 0
2
AEu u P
Lu u
F u
− =
− + =
= −
1
2
3
1.5
0.5
Lu P
AE
Lu P
AE
F P
=
=
= −

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 27/43
Mechanics of Static loading Conditions:
Let us consider the same problem with little modification:
Area = 2 A
L
L
P
Area = A
1
2
3
In this case springs witheffective stiffness K are addedto the system. The equationsare modified as:
1
2
3
1
3
1 1 0
1 3 2
0
0
2 2
A Eu
L
F u
uF
− − −
−
=
with3 3=− F Ku

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 28/43
Mechanics of Static loading Conditions:
Effectively, the governing equations are written as:
( )
( )
1 2
1 2
3 2 3 3
3 0
2 2
AEu u P
L
u u
AEF u u KuL
− =
− + =
= − + = −

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 29/43
Mechanics of Static loading Conditions:
Or the equations are rewritten as:
( )1 2
1 2
2 3
3 0
2 2 0
AEu u P
L
u u
AE AE
u K uL L
− =
− + =
− + + =

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 30/43
Mechanics of Static loading Conditions:
Hence the equation of equilibrium is :
11
2
3
0
3 2
2 2
0
0
0
A E A E
L L
A E A E A EL L L
A E A E
K L L
u
u
u
F
−
− −
− +
=
stiffnlocally
modified

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 31/43
Mechanics of Static loading Conditions:
Let us now take example of a 2-d beam:
X
Y R
1 R2
M 1M 2
Equilibrium equations can be written as:
+ =+ + =
1 2
1 2 2
0
0
R RM M R L

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 32/43
Mechanics of Static loading Conditions:
X
Y
R1
M 1
= − +1 1 x M M R x
= = − +2
1 12 x d y E I M M R x dx
M x
V x
On integrating and substituting the boundary conditions,we get the following results:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 33/43
Mechanics of Static loading Conditions:
2
6EI
L
312EIL
3
12EI
L
2
6EI
L
4EI
L
2EI
L
26EI
L2
6EIL

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 34/43
Mechanics of Static loading Conditions:
3
12EI
L3
12EI
L
2
6EI
L
2
6EI
L
4EI
L
2EI
L
2
6EI
L2
6EI
L

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 35/43
Mechanics of Static loading Conditions:
−
−
− − −
= 2
2
3
2
2
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
L L
L L L L
L L
L L L
K
L
E I
L
From these results, we can construct the stiffness matrixof a 2-d beam as:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 36/43
Mechanics of Static loading Conditions:
Let us now evaluate the matrix of a 3-d beam with all
degrees of freedom:

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 37/43
−
−
−
−
−
−
− − −
−
=
3 2 3 2
2 2
3 2 3 2
2 2
12 6 12 6
6
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . .
4 6 2
12 6 12 6
6 2
. .
. . . . . . . .
. . . . . . . .
. . . . . . . .
. . . . . . . .
6 4
A E A E
L L
A E A E
L L
G J G J
L L
G J G J
L L
EI EI EI EI
L L L L
EI EI EI EI
L LL LEI EI EI EI
L L L L
EI EI EI EI
L LL L
K
−
−
− − −
−
3 2 3 2
2 2
3 2 3 2
2 2
. . . . . . . .
. . . . . . . .
. . . . . . . .
12 6 12 6
6 4 6 2
12 6 12 6
6 2 6 4
EI EI EI EI
L L L L
EI EI EI EIL LL L
EI EI EI EI
L L L L
EI EI EI EI
L LL L

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 38/43
Mechanics of Static loading Conditions:Having developed the stiffness matrix, we need to orientthem for Global set of co-ordinates, as different elementsare oriented locally.
This is done as follows:
X
Y
Z
x
y
z
The transformation of co-ordinates take place
according to the equation:
[ ]
=
x X
y T Y z Z

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 39/43
Mechanics of Static loading Conditions:
Basically we find stiffness matrix for locally oriented
elements.Then the stiffness matrix can be transformed as:
{ } [ ] { }
[ ] { } [ ] [ ] { }
x y z x y z x y
X Y Z x y z
F K u
T F K
=
⇒ =

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 40/43
{ } [ ] [ ] [ ]
[ ]
{ }1−⇒ =
1 4 4 2 4 43
XYZ
XYZ xyz XYZ
K
F T k T u
Mechanics of Static loading Conditions:
Pre-multiplying both sides by we obtain:[ ]
1−T
Thus: [ ] [ ] [ ] [ ]1−=
XYZ xyz K T K T
Note: [ ] [ ]1−
=T
T T

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 41/43
Mechanics of Static loading Conditions:
Thus we finally conclude that the analysis
proceeds as:1. Building of geometry of the structure.
2. Defining material database and other properties.
3. Defining load vector and different boundary conditions.
1. Building of stiffness of the different elements of the structure in local
co-ordinates.
2. Transforming the stiffness matrices in Global system.
3. Assembling to get the whole stiffness of the structure.
4. Solve the equation:
Stress analysis proceeds as:
{ } [ ] { }1−=u k F

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 42/43
Mechanics of Static loading Conditions:
Finally, what we get as output?
We have obtained:
Nodal Displacements and rotations for the entire structure.
Forces and Moments at the different boundary locations
Challenges still left:
To determine the stress history of the
structure.

8/7/2019 plant layout lecture
http://slidepdf.com/reader/full/plant-layout-lecture 43/43
End of Part IEnd of Part I