Embed Size (px)
DESCRIPTION
Projeto Integrador módulo IV IFSC
Citation preview

INSTITUTO FEDERAL DE EDUCAÇÃO, CIÊNCIA E TECNOLOGIA DE
SANTA CATARINA – CAMPUS FLORIANÓPOLIS
CURSO SUPERIOR DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
Claudio Abílio da Silveira (Coordenador)
Leonardo Santana
Matheus Santos da Silva
UNIDADE DE MOVIMENTAÇÃO LINEAR
UTILIZANDO PINHÃO E CREMALHEIRA
PROJETO PRELIMINAR
Florianópolis, Abril de 2011

SUMÁRIO
1 PROJETO INFORMACIONAL ............................................................... 7
1.1 DESCRIÇÃO DO PRODUTO .............................................................. 8
1.1.1 APLICAÇÕES DO PRODUTO..................................................................... 9
1.1.2 OBJETIVOS ...........................................................................................10
1.1.2.1 OBJETIVO GERAL ...............................................................................10
1.1.2.2 OBJETIVOS ESPECÍFICOS ...................................................................10
1.1.3 RESTRIÇÕES ESPECÍFICAS RELACIONADOS AO PRODUTO ......................11
1.2 FATORES DE INFLUÊNCIA NO PROJETO ........................................ 12
1.2.1 CRONOGRAMA DE PLANEJAMENTO ........................................................12
1.2.2 PRODUTOS EXISTENTES NO MERCADO ..................................................14
1.3.3 NORMAS E LEIS QUE AFETAM O PRODUTO .............................................16
1.2.4 NORMAS TÉCNICAS DE SEGURANÇA ......................................................18
1.3 CLIENTES ...................................................................................... 20
1.3.1 ANÁLISE DO CICLO DE VIDA DO PRODUTO .............................................20
1.3.2 DEFINIÇÃO DOS CLIENTES ....................................................................21
1.3.3 NECESSIDADES DOS CLIENTES ..............................................................22
1.4 REQUISITOS DOS CLIENTES ......................................................... 24
1.5 REQUISITOS DE PROJETO ............................................................. 26
1.6 ESPECIFICAÇÕES DE PROJETO ..................................................... 27
2 PROJETO CONCEITUAL .................................................................... 28
2.1 ESTRUTURA FUNCIONAL ............................................................... 29
2.1.2 FUNÇÃO GLOBAL ..................................................................................30
2.1.3 ESTRUTURAÇÃO DO PRODUTO MECATRÔNICO ......................................32
2.1.3 ESTRUTURAS FUNCIONAIS DO PRODUTO ..............................................33
2.1.3.1 ESTRUTURA FUNCIONAL ELETROELETRÔNICA ....................................33
2.1.3.2 ESTRUTURA FUNCIONAL MECÂNICA ...................................................34
2.2 CONCEPÇÕES ................................................................................ 36

3
2.2.1 CONCEPÇÕES ALTERNATIVAS DO PRODUTO ..........................................36
2.2.1.1 CONCEPÇÕES ELETROELETRÔNICAS ...................................................36
2.2.1.2 CONCEPÇÕES MECÂNICAS ..................................................................39
2.2.2 SELEÇÃO E COMPARAÇÃO DAS CONCEPÇÕES .........................................43
2.2.3 APRESENTAÇÃO CONCEPÇÃO ADOTADA ................................................47
2.2.3.1 MODELO ELETROELETRÔNICO............................................................47
2.2.3.2 MODELO MECÂNICO ...........................................................................49
2.2.4 AVALIAÇÃO DA CONCEPÇÃO ADOTADA ..................................................50
3 PROJETO PRELIMINAR .................................................................... 52
3.1 ESTRUTURA ELETROELETRÔNICA ................................................. 53
3.1.1 FUNÇÃO SUPRIR ENERGIA .....................................................................53
3.1.1.1 FORNECER TENSÃO............................................................................54
3.1.1.2 DISSIPAR ..........................................................................................60
3.1.2 FUNÇÃO CONTROLAR ............................................................................62
3.1.3 FUNÇÃO LIMITAR ..................................................................................68
3.1.3.1 DETERMINAR HOME ...........................................................................68
3.1.3.2 DETERMINAR FIM DE CURSO ..............................................................70
3.1.4 FUNÇÃO INFORMAR POSIÇÃO................................................................72
3.1.5 FUNÇÃO FORNECER CORRENTE .............................................................79
3.1.6 FUNÇÃO MOVIMENTAR .........................................................................82
3.2 ESTRUTURA MECÂNICA................................................................. 84
3.2.1 FUNÇÃO SUSTENTAR ............................................................................84
3.2.2 PROTEGER ...........................................................................................86
3.2.3 GUIAR MOVIMENTO ..............................................................................87
3.2.4 TRANSMITIR MOVIMENTO.....................................................................88
3.2.5 SINALIZAR ...........................................................................................91
REFERÊNCIAS ..................................................................................... 94
APÊNDICE A – CASA DA QUALIDADE................................................... 96
APÊNDICE B - DESENHOS TÉCNICOS .................................................. 97
ANEXO A – CATALOGO TÉCNICO BORNES BR0 .................................. 100

LISTA DE FIGURAS
FIGURA 1 – UNIDADE DE MOVIMENTAÇÃO LINEAR TÍPICA ............................................ 8
FIGURA 2 – CRONOGRAMA DE PLANEJAMENTO .........................................................13
FIGURA 3 – UNIDADE DE MOVIMENTAÇÃO LINEAR RAC..............................................15
FIGURA 4 – UNIDADE DE MOVIMENTAÇÃO LINEAR MEC PART’S ....................................15
FIGURA 5 – UNIDADE DE MOVIMENTAÇÃO LINEAR HIDRAPA ........................................16
FIGURA 6 – CICLO DE VIDA DO PRODUTO (ADAPTADO DE FONSECA, 2000) ....................20
FIGURA 7 – MODULARIDADE ENTRE UNIDADES MOVIMENTAÇÃO LINEAR ..........................30
FIGURA 8 – FUNÇÃO GLOBAL DO SISTEMA ..............................................................31
FIGURA 9 – ESTRUTURAÇÃO DO PRODUTO .............................................................32
FIGURA 10 – SÍNTESE FUNCIONAL ELETROELETRÔNICA ..............................................34
FIGURA 11 – SÍNTESE FUNCIONAL MECÂNICA ..........................................................35
FIGURA 12 – ESQUEMÁTICO DE LIGAÇÃO DO TRAFO 9+9V. ........................................55
FIGURA 13 – ESQUEMÁTICO DA FONTE DE 5V. ........................................................56
FIGURA 14 – LAYOUT DA PLACA PARA A FONTE DE 5V. ..............................................58
FIGURA 15 – LAYOUT 3D DA PLACA PARA A FONTE DE 5V. .........................................59
FIGURA 16 – COOLER. .....................................................................................61
FIGURA 17 – ATMEGA 328P E SEU ESQUEMÁTICO ....................................................64
FIGURA 18 – ESQUEMÁTICA DO CIRCUITO CONTENDO O MICROCONTROLADOR .................65
FIGURA 19 – LAYOUT DA PLACA PARA O ATMEGA 328 ...............................................67
FIGURA 20 – LAYOUT 3D DA PLACA PARA O ATMEGA 328P ........................................68
FIGURA 21 – CHAVE DE ACIONAMENTO MECÂNICO ...................................................69
FIGURA 22 – CIRCUITO DE LIGAÇÃO PARA CHAVES DE FIM DE CURSO. ............................71
FIGURA 23 – ESQUEMÁTICO DO CIRCUITO ENCODER .................................................75
FIGURA 24 – LAYOUT DA PLACA PARA O ENCODER ....................................................78
FIGURA 25 – LAYOUT EM 3D DA PLACA PARA O ENCODER ...........................................79
FIGURA 26 – DIAGRAMA DE FUNCIONAMENTO DO DRIVE ............................................81
FIGURA 27 – VISTA SUPERIOR DO DRIVE DCBMP ....................................................82
FIGURA 28 – MOTOR DE PASSO ..........................................................................83
FIGURA 29 – PERFIL DE ALUMÍNIO EXTRUDADO .......................................................85
FIGURA 30 - ESTRUTURA DE SUSTENTAÇÃO ............................................................86

FIGURA 31 – APLICAÇÃO DAS GUIAS LINEARES E SEUS PATINS. ....................................88
FIGURA 32 – SISTEMA DE REDUÇÃO POR POLIAS ......................................................90
FIGURA 33 – TRANSMISSÃO POR MEIO DE PINHÃO E CREMALHEIRA ...............................91
FIGURA 34 – SINALIZAÇÃO DOS ESTADOS DE OPERAÇÃO ............................................92
FIGURA 35 – ETIQUETAS DE RISCOS AO OPERADOR ..................................................93

LISTA DE QUADROS
QUADRO 1 – REQUISITO DOS CLIENTES ................................................................25
QUADRO 2 – REQUISITOS DO PROJETO .................................................................26
QUADRO 3 – ESPECIFICAÇÕES DO PROJETO ............................................................27
QUADRO 4 – MATRIZ MORFOLÓGICA DA ESTRUTURA ELETROELETRÔNICA .......................39
QUADRO 5 – MATRIZ MORFOLÓGICA DA ESTRUTURA MECÂNICA ...................................42
QUADRO 6 – CONCEPÇÕES DA ESTRUTURA ELETROELETRÔNICA ...................................44
QUADRO 7 – CONCEPÇÕES DA ESTRUTURA MECÂNICA ...............................................45
QUADRO 8 – MATRIZ DE DECISÃO (MÉTODO DE PUGH) .............................................46

1 PROJETO INFORMACIONAL
A automação de processos está atualmente amplamente difundida em
diversas áreas sejam elas industriais ou não. A busca pelo desenvolvimento de novas
técnicas e o aprimoramento das tecnologias já dominadas apresenta grande
importância para o crescimento produtivo e para o aumento da qualidade dos
produtos e serviços que se utilizam de soluções mecatrônicas.
Desde o inicio dos processos de automatização procura-se obter o controle
sobre os fenômenos e as forças que atuam em um sistema técnico voltado ao
cumprimento de uma determinada função, sendo dos um dos aspectos presentes
nesse cenário o tipo de movimentação utilizada.
A responsabilidade de movimentar subsistemas em um equipamento esta
associada à utilização de uma série de componentes que permitem a transmissão de
força, controle de aceleração e velocidade, suporte de carregamentos e outros
elementos que atuam de forma conjunta para garantir essa movimentação. Entre as
formas de movimentação mais aplicadas está à linear, onde os corpos são
deslocados em linha reta, embora seja um movimento unidimensional o domínio de
suas variáveis aliado a robustez mecânica do sistema garantem precisão e
confiabilidade capazes de serem empregadas em sistemas mais avançados de
movimentação com vários eixos de liberdade.
O projeto visa à construção de uma unidade de movimentação linear, um
módulo que integra componentes mecânicos, elétricos e eletrônicos com a finalidade
de permitir a movimentação de uma plataforma (denominada mesa ou carro) ao
longo de um determinado trajeto, com deslocamento nos dois sentidos. O
desenvolvimento inclui a escolha dos materiais e o dimensionamento dos
componentes que permitam um deslocamento eficiente e também o controle de
posicionamento da mesa ao longo do seu curso.
Além das características típicas associadas a uma unidade de movimentação, o
produto deve permitir a sua integração com outros equipamentos do gênero, essa
modularização facilitará futuras utilizações de sua movimentação linear em
montagens com outras unidades.

1.1 DESCRIÇÃO DO PRODUTO
Uma unidade de movimentação linear visa permitir o deslocamento de um
corpo em uma trajetória reta, em ambas as direções e limitado a certo comprimento
por dispositivos sensoriais ou físicos que determinam o curso de atuação da unidade.
Associado ao desenvolvimento desse produto mecatrônico estão incluídos outros
princípios, uma vez que a sua funcionalidade depende da correta integração entre os
componentes e subsistemas técnicos que compõem a unidade de movimentação
linear.
Sua configuração usual apresenta uma estrutura de sustentação rígida que
permite a fixação e garante o correto posicionamento dos componentes durante seu
funcionamento. Um elemento móvel (mesa) que sofre deslocamento em relação à
estrutura de sustentação e permite o transporte de cabeçotes porta-ferramenta,
peças, outras unidades de movimentação ou qualquer elemento posicionado sobre a
mesa. A figura a seguir apresenta uma unidade de movimentação linear (sem
acionamento):
Fonte: www.brighentti.com.br
FIGURA 1 – Unidade de movimentação linear típica
Estão incluído também elementos de apoio responsáveis por suportarem e
distribuírem o carregamento sofrido pelo carro além de permitirem o seu livre
deslocamento ao longo do curso de forma eficiente oferecendo o mínimo de
resistência a movimentação por meio da redução do atrito entre os elementos do
sistema. Elementos do apoio têm influência direta sobre o produto, pois evitam que

9
as forças (radiais e de momento) que atuam sobre os elementos móveis extrapolem
as tolerâncias que determinam a precisão do sistema.
Para efetivar a movimentação linear são necessário sistemas de acionamento
e transmissão capazes de atender as especificações de projeto e de utilização do
produto. Entre os acionadores mais utilizados estão os motores elétricos e seus tipos
construtivos, podendo ser utilizados motores DC, servomotores e motores de passo,
cada um com faixas de potência, torque e características particulares. As
transmissões são responsáveis por converterem a energia fornecida pelo sistema de
acionamento em força e movimento para impulsionar a estrutura do carro permitindo
que este efetue um deslocamento ao longo dos elementos de apoio, no caso uma
trajetória retilínea.
Além dos dispositivos mecânicos necessários pare realização do movimento
linear empregam-se dispositivos eletrônicos e sensoriais que auxiliam o software no
comando da unidade. Seus sistemas geralmente apresentam sensores que informam
os limites de deslocamento do carro ao longo do seu curso e a posição inicial
(chamado “zero máquina”), ou possuem um dispositivo capaz determinar a posição
das partes móveis de forma constante. Um gerenciador eletrônico (CLP,
microcontrolador) utiliza as informações coletadas para definir a execução dos
comandos que efetivamente ativaram os acionadores do sistema.
1.1.1 APLICAÇÕES DO PRODUTO
A necessidade de movimentos do tipo linear é uma das principais
características dos sistemas técnicos que empregam métodos de automação para
realizarem operações de deslocamento, presentes em diversas aplicações.
Unidades de movimentação linear estão presentes em centros de usinagem,
máquinas de corte para chapas metálicas, impressoras gráficas, linhas de montagem,
equipamentos médicos e outros dispositivos mecânicos que exigem este tipo de
movimentação. Esta diversidade de aplicação permite que os produtos e
componentes voltados para movimentação linear possam ser encontrados em
diversas áreas como indústria siderúrgica, automobilística, aeronáutica, medicina
(radiologia, odontologia), alimentícia entre outras.

10
O produto em questão deve atender aplicações voltadas para uso didático,
com características que favoreçam a acessibilidade dos alunos do Curso Superior de
Tecnologia em Mecatrônica Industrial aos métodos, técnicas e componentes
empregados na construção de um sistema mecatrônico, no caso uma unidade de
movimentação linear. A sua utilização em módulos mais avançados implica na
necessidade do produto atender requisitos técnicos que permitam a realização de
testes, anexação de novos componentes, modularização com outros sistemas,
facilidade de manutenção e custos agregados viáveis para a instituição.
Seu layout de montagem deve conter alto nível de padronização a fim de
garantir a maior semelhança técnica possível com os produtos já existentes no
mercado, facilitando o conhecimento das técnicas e componentes aplicados
profissionalmente no desenvolvimento de projetos mecatrônicas.
1.1.2 OBJETIVOS
Os objetivos compreendem os resultados que serão alcançados ao final do
projeto, sejam eles físicos, no caso o produto estruturado ou as competências
desenvolvidas ao longo do módulo que se relacionam com o desenvolvimento e a
construção do projeto integrador.
1.1.2.1 OBJETIVO GERAL
Desenvolver uma unidade de movimentação linear, com o principio de transmissão
de movimento através de pinhão e cremalheira.
1.1.2.2 OBJETIVOS ESPECÍFICOS
- Desenvolver a estrutura física e funcional do produto.
- Selecionar e dimensionar componentes e estrutura mecânica.
- Elaborar layout e placas de circuito de impresso.
- Desenvolver linguagem wiring, para controle do processo.
- Realizar testes.
- Analisar os resultados, visando identificar se os mesmos atendem as necessidades
dos clientes.

11
1.1.3 RESTRIÇÕES ESPECÍFICAS RELACIONADOS AO PRODUTO
Os processos modelagem e construção do produto alvo do projeto apresentam
algumas restrições técnicas definas durante a fase de apresentação dos temas. Entre
elas destacam-se a utilização de componentes disponibilizados pela instituição a fim
de facilitar a construção mecânica e eletrônica e garantir a possibilidade de
conclusão pratica do projeto devido curta disponibilidade de tempo para aquisição de
materiais.
Outra restrição determinante estabelece a forma de transmissão de
movimento efetuada entre o sistema de acionamento e as partes móveis por meio da
utilização do conjunto pinhão e cremalheira, um par de engrenagens sendo o
pinhão do tipo cilíndrico e a cremalheira do tipo plana permitindo a transformação
dos movimentos rotacionais em deslocamento linear.

1.2 FATORES DE INFLUÊNCIA NO PROJETO
O desenvolvimento de projeto deve considerar além das necessidades técnicas
relacionadas à construção mecânica e eletroeletrônica, outros princípios que podem
de alguma maneira influenciar nas características do produto, desde a aceitação dos
clientes frente aos concorrentes de mercado quanto às restrições e normas de
fabricação que garantem qualidade do produto, entre esses fatores estão:
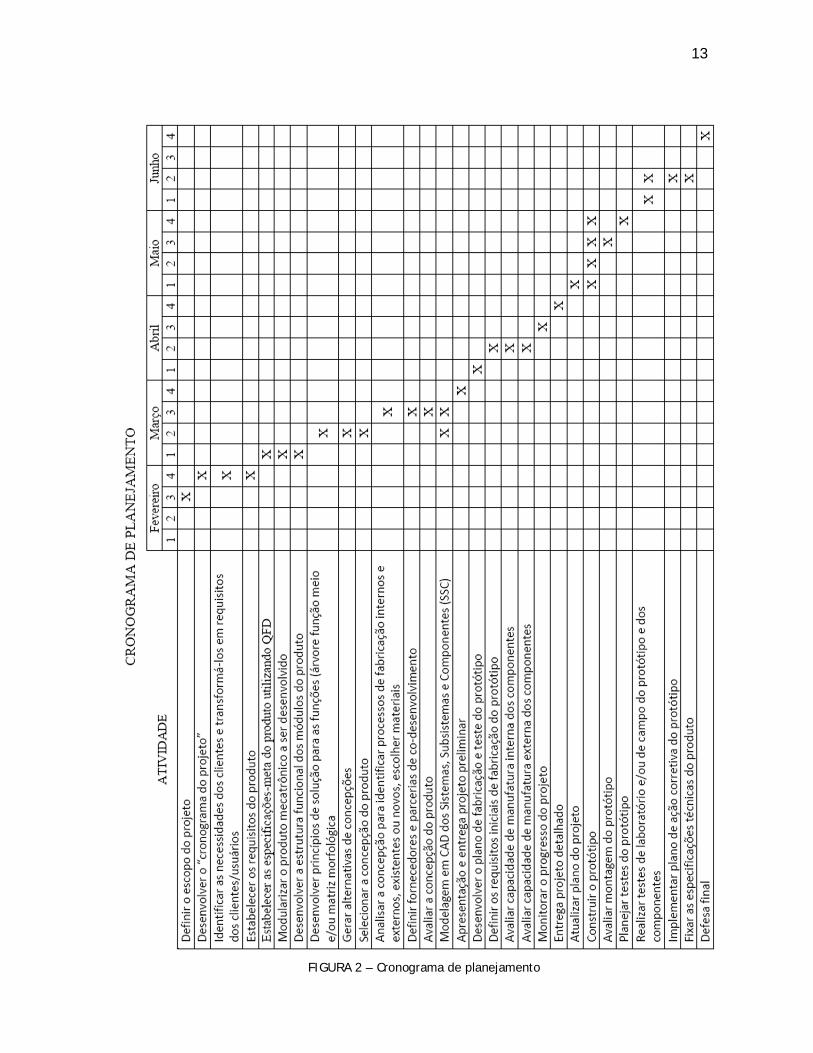
1.2.1 CRONOGRAMA DE PLANEJAMENTO
Um dos fatores com influência critica no desenvolvimento de projeto
compreende o tempo necessário para a execução das atividades pela equipe de
projeto. Sua organização depende então de ferramentas de auxilio com o
cronograma de planejamento (figura 2).
13
FIGURA 2 – Cronograma de planejamento

14
1.2.2 PRODUTOS EXISTENTES NO MERCADO
As unidades de movimentação linear são utilizadas em vários tipos de
maquinas do ramo industrial. Máquinas CNC, tornos, fresadoras e maquinas de
produção de utensílios em geral.
Geralmente são utilizados fusos de esferas, por ser preciso, trabalhar com
cargas consideráveis sem perda de velocidade e pela “facilidade” de controlar
juntamente com um motor de passo e um encoder.
Todas as mesas apresentam os mesmos princípios de funcionamento. Um
bloco apoiado geralmente em 1 ou mais trilhos, às vezes robusto como o sistema de
trilho/patins ou menos robustos como eixos retificados/rolamentos lineares.
Não foi encontrado nenhum sistema de precisão utilizando sistema
pinhão/cremalheira, porém avaliando as outras concepções acredito ser possível e
viável criar um sistema de certa forma inovador, com qualidade e precisão de
milímetros, mesmo trabalhando com cargas maiores, principal vantagem do sistema.
Um sistema parecido já utilizado no mercado (ultrapassado) é as direções
mecânicas, onde o pinhão ficava acoplado ao eixo do volante e a cremalheira no eixo
de direção da roda.
Pesquisa de concorrentes e fornecedores:
Mectrol – automação industrial: empresa fornecedora de soluções
relacionadas a parte de movimentação (mecânica), especializada em guias
lineares, mancais, eixos retificados e rolamentos lineares;
RAC – movimentação linear (concorrente): empresa especializada em
movimentação linear, tendo inclusive módulos já prontos para a venda direta
(porém os mesmos são feitos utilizando apenas fuso de esferas), como
mostrado na figura abaixo. Também fornecem guias lineares e rolamentos
lineares;

15
FIGURA 3 – Unidade de movimentação linear RAC
Mec Part’s – Linear techonology (concorrente): empresa muito completa no
ramo. Oferece desde as peças até mesas X/Y de alta precisão, porém também
utilizando fuso de esferas, possui uma linha de movimentação com proteção
dos elementos internos contra cavacos oriundos de usinagem, entre outros
(figura 4). Trabalha também com rolamentos lineares, guias lineares, esferas
transferidoras, eixos e mancais;
FIGURA 4 – Unidade de movimentação linear Mec Part’s
NSK: empresa de suplementos industriais especializada em equipamentos com
elementos rolantes. Muito renomada na cadeia industrial. Fabrica guias
lineares com diferentes características, cada uma com uma aplicação
diferenciada;
Hidrapa (concorrente): empresa não muito conhecida no mercado.
Trabalham com mesas de posicionamento (figura 5), rolamentos lineares,
guias lineares, mesas e guias de rolos cruzados.

16
FIGURA 5 – Unidade de movimentação linear Hidrapa
ABelt Cremalheira e Pinhão: empresa fornecedora de cremalheiras e seus
respectivos pinhões. Tem uma ampla linha de diferentes passos e
características.
1.3.3 NORMAS E LEIS QUE AFETAM O PRODUTO
Com o aumento das exigências e da competitividade no mercado atual, fica
evidente a necessidade dos produtos e serviços atenderem a requisitos de
padronização e tolerância cada vez mais rigorosos. A certificação de produtos e
serviços esta relacionada com sua adequação a legislação vigente e as normas
existentes para garantir que os processos utilizados em seu desenvolvimento e
fabricação possuam níveis de qualidade e segurança satisfatórios.
No contexto internacional existem vários órgãos que criam as normas e
regulamentam produtos, no Brasil a obrigação de fazer com que sejam cumpridos os
padrões de forma legal pertence a ABNT (Associação Brasileira de Normas Técnicas).
Abaixo estão relacionadas algumas das normas técnicas que possuem influencia
sobre o projeto:
a) ABNT NBR 14229:2007NBR 14229:2007
Data de Publicação: 09/04/2007

17
Título: Ligas de alumínio - Perfis extrudados sólidos ou tubulares para fins
estruturais - Requisitos
Comitê: ABNT/CB-35 Alumínio
Status: Em Vigor
Organismo: ABNT - Associação Brasileira de Normas Técnicas
Objetivo: Esta Norma estabelece os requisitos para os perfis extrudados
sólidos ou tubulares de ligas de alumínio para uso em aplicações estruturais,
tais como estruturas para sinalização viária, postes e braços de postes,
defensas em auto-estradas e pontes, uso geral em construção mecânica e
estruturas em construção civil.
b) ABNT NBR 9438:1988
Data de Publicação: 30/12/1988
Título: Cremalheira de para engrenagens cilíndricas de perfil evolvente -
Dimensões - Padronização
Comitê: ABNT/CB-04 Máquinas e Equipamentos Mecânicos
Status: Em Vigor Organismo: ABNT - Associação Brasileira de Normas
Técnicas
Objetivo: Esta Norma padroniza as dimensões do perfil da cremalheira de
para um sistema de engrenagens cilíndricas com perfil de envolvente,
aplicadas na área mecânica, para módulos de 1 mm até 50 mm.
c) ABNT NBR ISSO 281:2007
Data de Publicação: 26/03/2010
Título: Mancais de rolamentos — Capacidade de carga dinâmica e vida útil
estimada
Comitê: ABNT/CB-04 Máquinas e Equipamentos Mecânicos
Status: Em Vigor
Organismo: ABNT - Associação Brasileira de Normas Técnicas
Objetivo: Esta Norma especifica métodos de calculo da capacidade de carga
dinâmica básica de mancais de rolamentos dentro do campo de dimensões
mostrado nas publicações ISO relevante, fabricados com aço para rolamentos,

18
com tratamento térmico, de alta qualidade, normalmente utilizados e usuais,
de acordo com as boas praticas de fabricação e, basicamente, de projeto
convencional com relação ao formato das superfícies de contato rolantes.
d) ABNT NBR 15623-3:2008
Data de Publicação: 15/09/2008
Título: Máquina elétrica girante - Dimensões e séries de potências para
máquinas elétricas girantes - Padronização
Parte 3: Motores pequenos e flanges BF10 a BF50
Comitê: ABNT/CB-03 Eletricidade
Status: Em Vigor
Organismo: ABNT - Associação Brasileira de Normas Técnicas
Objetivo: Esta parte da ABNT NBR 15623 estabelece dimensões de fixação e
de ponta de eixo para máquinas elétricas girantes de eixo horizontal, para
motores pequenos com flanges entre BF10 e BF50, que usualmente são
utilizados em dispositivos de controle.
1.2.4 NORMAS TÉCNICAS DE SEGURANÇA
O desenvolvimento de projeto deve garantir que o processo de manufatura,
transporte, venda e utilização do produto possa atender de forma satisfatória as
normas de segurança estabelecidas para limitar os riscos oferecidos aos
trabalhadores e eventuais envolvidos no ciclo de vida do produto. Entres as principais
normas de segurança vigor relacionadas com o produto estão:
Norma Regulamentadora NR 10
Título: Segurança em Instalações e Serviços em Eletricidade
Objetivo: Estabelece os requisito e condições mínimas objetivando a
implementação de medidas de controle e sistemas preventivos, de forma a
garantir a segurança e a saúde dos trabalhadores que, direta ou
indiretamente, interagem em instalações elétricas e serviços com
eletricidade.

19
Norma Regulamentadora NR 17
Título: Ergonomia.
Objetivo: Visa a estabelecer parâmetros que permitam a adaptação das
condições de trabalho às características psicofisiológicas dos trabalhadores,
de modo a proporcionar um máximo de conforto, segurança e desempenho
eficiente.
1.3 CLIENTES
Após a definição do projeto, uma das etapas necessárias para obtenção de
informações é a definição do ciclo de vida do produto, ou seja, uma projeção dos
estágios pelos quais o produto deverá passar ao longo da etapa de planejamento,
fabricação e consumo que permitira a identificação dos potenciais envolvidos no
processo.
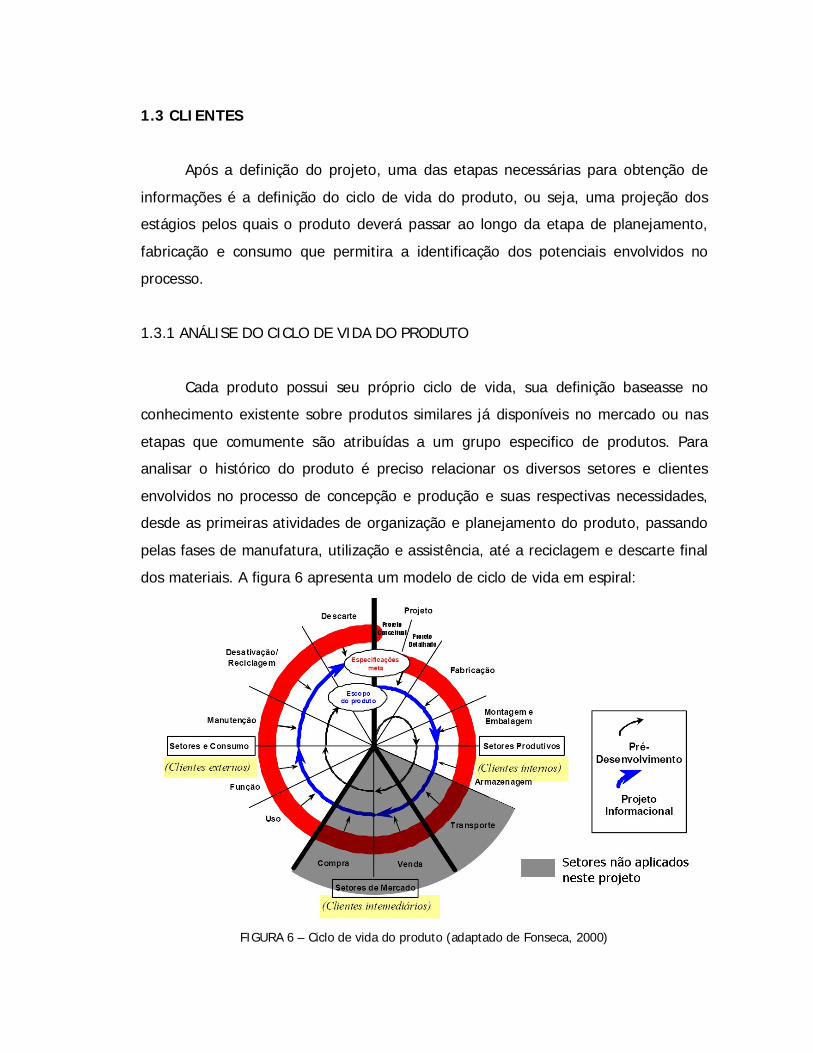
1.3.1 ANÁLISE DO CICLO DE VIDA DO PRODUTO
Cada produto possui seu próprio ciclo de vida, sua definição baseasse no
conhecimento existente sobre produtos similares já disponíveis no mercado ou nas
etapas que comumente são atribuídas a um grupo especifico de produtos. Para
analisar o histórico do produto é preciso relacionar os diversos setores e clientes
envolvidos no processo de concepção e produção e suas respectivas necessidades,
desde as primeiras atividades de organização e planejamento do produto, passando
pelas fases de manufatura, utilização e assistência, até a reciclagem e descarte final
dos materiais. A figura 6 apresenta um modelo de ciclo de vida em espiral:
FIGURA 6 – Ciclo de vida do produto (adaptado de Fonseca, 2000)

21
O ciclo se divide em diferentes setores, onde a área de projeto, fabricação,
montagem, armazenamento e transporte configuram os chamados clientes internos,
que compreendem os fabricantes, a equipe envolvida no desenvolvimento técnico do
projeto e na produção do produto. Em geral priorizam soluções que tragam
facilidades de projeto e manufatura.
Diferentemente de um produto desenvolvido segundo um ciclo voltado para a
comercialização, à unidade de movimentação linear idealizada pelo projeto visa o uso
didático do equipamento, o que justifica a inexistência das áreas de transporte,
venda e compra. Sua utilização de forma interna pela instituição dispensa a
necessidade de clientes responsáveis pela logística de transporte do produto ou dos
clientes intermediários, como são denominados os envolvidos no processo de venda
e de compra.
Os setores de mercado embora não possuam representantes (clientes
intermediários) específicos no projeto apresentam necessidades que não devem ser
negligenciadas, pois agregam valor ao produto quando atendidas, como no caso de
um produto que seja atrativo, de fácil exposição e transporte, por exemplo.
Os clientes externos são os indivíduos (professores e alunos) que podem de
alguma forma usufruir da utilização do produto por meio das funções que o mesmo
disponibiliza, realizam operações de manutenção, efetuam a desmontagem ou
reciclagem do produto e quando permitido modificam o equipamento visando à
melhora de sua eficiência ou aplicação didática.
1.3.2 DEFINIÇÃO DOS CLIENTES
Por meio da análise do ciclo de vida é possível determinar os clientes
envolvidos com o produto e consequentemente seus anseios e necessidades, o que
possibilita a equipe de projeto determinar quais as características e funções
atribuídas à unidade de movimentação linear possui maior importância para se obter
a satisfação de seus clientes nos diversos setores.
Os clientes dos setores produtivos correspondem à própria equipe de projeto,
responsável pela elaboração e excussão dos planos de produção e das atividades de
fabricação e de montagem, cujas necessidades estão diretamente relacionadas com

22
facilidades em termos de construção, disponibilidade de recurso na instituição
(matéria-prima, equipamentos e instalações), utilização de componentes
padronizados e segurança nos métodos empregados durante esta fase do projeto. A
área de armazenagem é representada pelos responsáveis e funcionários ligados os
laboratórios onde o produto será acondicionado, suas principais necessidades estão
relacionadas com a fácil manipulação da estrutura e seus componentes aliados a um
bom aproveitamento das dimensões ocupadas pela unidade evitando a existência de
partes projetadas para fora de sua base, preenchendo mais espaço de forma
desnecessária.
No setor de consumo os clientes envolvidos englobam os professores e alunos
que estarão relacionados direta ou indiretamente com o uso do produto desejando
que o mesmo apresente características como: segurança, eficiência, durabilidade,
confiabilidade e facilidade de operação. Também fazem parte dos clientes externos
responsáveis pela manutenção, reciclagem e descarte, que em virtude da utilização
interna do produto serão membros do curso ligados aos laboratórios, cujas
expectativas são o baixo custo de manutenção, a facilidade de desmontagem e a
possibilidade de reutilização de peças.
1.3.3 NECESSIDADES DOS CLIENTES
O desenvolvimento de um projeto está diretamente relacionado com as
expectativas e anseios dos clientes, que refletiram em uma aceitação do produto
pelo mercado caso eles sejam atendidos. A coleta de informações que define as
necessidades de determinado grupo em relação ao produto pode ser obtida a partir
de entrevistas diretas com seus membros ou pela aplicação de questionário
relacionado com o produto.
Em geral as necessidades dos clientes são apresentadas em diferentes
variações lingüísticas, dependendo do grau de conhecimento técnico ou a
familiarização com tema proposto para o projeto. Cabe a equipe de projeto
selecionar e agrupar as necessidades de forma a eliminar as repetições, para obter
apenas o mínimo de informações, consideradas relevantes para a execução do
projeto. A listagem abaixo apresenta essas necessidades:

23
a) Ter comprimento limitado;
b) Ser de baixo peso;
c) Ter capacidade de integração com outros equipamentos;
d) Baixo custo;
e) Ser ergonomia;
f) Facilidade de transporte;
g) Ser segurança;
h) De fácil manutenção;
i) Ter uma estética agradável;
j) Ausência de superfícies cortantes;
k) Ter acessibilidade didática;
l) Permitir movimentação linear;
m) Apresentar baixo percentual de falhas;
n) Ser robusto;
o) Ter flexibilidade de utilização;
p) Baixo nível de ruídos;
q) Utilizar alimentação da rede local (220V);
r) Ser fácil de fabricação;
s) Ter disponibilidade de componentes na instituição.

1.4 REQUISITOS DOS CLIENTES
Uma das características encontradas das necessidades dos clientes do projeto
é a variação de termos utilizados para definir as características atribuídas ao produto.
Para que a linguagem utilizada torne-se acessível para a equipe de projeto é
necessários traduzir esse atributos nos chamados requisitos dos clientes, permitindo
relacioná-los a propriedades físicas dos materiais utilizados, fatores humanos,
aspectos de durabilidade e de apreensão em relação a possíveis falhas.
a) Baixo nível de falhas;
b) Possuir ergonomia;
c) Apresentar estética agradável;
d) Prevenir danos aos usuários e ao equipamento;
e) Ausência de cantos vivos;
f) Possuir padronização;
g) Robustez mecânica;
h) Facilidade de manutenção;
i) Possuir transportabilidade;
j) Possibilitar diferentes layouts de montagem;
k) Utilizar recursos disponíveis na instituição;
l) Organização de componentes;
m) Permitir acessibilidade aos componentes e as funções;
n) Movimentar-se linearmente;
o) Otimizar a área de movimentação;
p) Modularização para interagir com outros equipamentos;
q) Utilizar materiais de baixo peso;
r) Possuir baixo custo;
s) Possuir poucas vibrações;
t) Suportar alimentação da rede local.
Os requisitos dos clientes também podem ser ordenados de acordo com grau
de importância dado a cada um deles durante as entrevistas ou pela frequência com
que foram citados, como mostra o quadro abaixo.

25
Classe de requisitos
Requisitos dos clientes Grau de
importância
Requisitos básicos
Confiabilidade 5 Ergonomia 4 Estética 3 Segurança 5 Padronização 5
Requisitos do ciclo de vida
Manutenção 4 Transporte 3 Montabilidade 5
Requisitos específicos
Disponibilidade de material 5 Organização 5 Acessibilidade 5 Movimento linear 5 Dimensões 3 Modularização 4 Peso 3 Baixo custo 5 Baixa vibração 3 Rede 220 V 5
QUADRO 1 – Requisito dos clientes

1.5 REQUISITOS DE PROJETO
Os requisitos dos clientes definidos no processo anterior representam as
necessidades em relação ao produto descritas em uma linguagem acessível à equipe
de desenvolvimento, porém ainda apresentam de forma subjetiva ou qualitativa,
sendo preciso transformá-las em atributos tecnicamente mensuráveis.
Ao se expressar os requisitos dos clientes em uma linguagem técnica de
engenharia obtêm-se os requisitos de projeto, que são atributos capazes de serem
mensurados por alguma grandeza física, que definira as características finais do
produto.
Requisitos do projeto
Confiabilidade Taxa de falhas (0) Precisão (+) Organização (+)
Ergonomia Peso (+) Dimensão (+)
Segurança
Isolamento elétrico (+) Ausência cantos vivos (0) Sistema de Travamento (+) Resistência mecânica (0)
Econômicos N° peças padronizadas (+) N° pecas disponíveis (+) Baixo custo (+)
Funcionamento Deslocamento linear (+) Baixa vibração (0) Modularização (+)
QUADRO 2 – Requisitos do projeto

1.6 ESPECIFICAÇÕES DE PROJETO
Baseado na análise da primeira matriz do método QFD, a casa da qualidade
(apêndice A), foi então definido o grau de importância de cada meta do projeto. As
mesmas estão relacionadas no quadro abaixo:
Especificação Valor Meta Aspecto indesejado
1 N° peças padronizadas 65% Indisponibilidade de peças
2 Modularização Compatibilidade com sistemas similares Restrições de utilização
3 Deslocamento linear Superior a 300 mm Curso limitado 4 Precisão Menor que 1.0 mm Imprecisão
5 Sistema de travamento Bloqueio de movimentação menor que 1 segundo Falta de segurança
6 Resistência mecânica Até 50 Kg Deformações da estrutura
7 Taxa de falhas Mínimo de ocorrências possíveis Falta de confiabilidade
8 Ausência de cantos vivos
0 arestas Elevado número de arestas cortantes
9 N° de peças disponíveis >70% das peças utilizadas Não ter as peças
disponíveis 10 Baixo custo Inferior a 1000 reais Superfaturamento
11 Peso Até 15 Kg Peso superior ao valor meta
12 Baixa vibração Não vibrar durante funcionamento
Instabilidade da estrutura
13 Isolamento elétrico Impossibilitar a continuidade entre a estrutura e os fios de alimentação
Energizar a estrutura do produto
14 Dimensão 400 X 250 mm Dimensões superiores
15 Organização Boa distribuição dos componentes construtivos
Falta de distribuição ordenada dos componentes construtivos
QUADRO 3 – Especificações do projeto

2 PROJETO CONCEITUAL
O projeto conceitual, assim como as demais etapas de desenvolvimento de
produtos propostas pela metodologia estudada pela equipe, é de grande importância
para o andamento do trabalho. Neste momento busca-se desenvolver a concepção
do produto, ou seja, a descrição aproximada das tecnologias, princípios de
funcionamento e formas que o projeto poderá ter. Para isso são desenvolvidas
várias concepções diferentes, que serão representadas por meio de modelos
estruturados, estabelecidos por estudiosos da área de desenvolvimento de produtos.
São exemplos desses modelos a síntese funcional e a matriz morfológica, que
por serem muito referenciadas na literatura, serão à base das decisões do projeto
aqui apresentado. Com a síntese funcional relaciona-se o sistema técnico com a
física do problema, por meio de fluxos básicos de energia, materiais e sinais. O
primeiro passo é determinar a função global do produto. Em seguida é feita a
decomposição da função total em outras menos complexas. Assim melhora-se a
busca por soluções e o entendimento do problema de projeto.
Já a matriz morfológica é uma forma de organizar sistematicamente todas as
alternativas conhecidas para efetuar uma determinada função, pois esta dispõe das
subfunções estabelecidas pela síntese funcional e das soluções para cada uma
delas. A próxima etapa é comparar todas as concepções desenvolvidas por meio do
que chamamos de matriz das decisões, ou método de Pugh.
A melhor concepção foi aquela que se adaptou às necessidades dos clientes
e respeitou as relações de custo-benefício propostas pela equipe. Finalizada essa
fase parte-se, então, para o projeto preliminar.

2.1 ESTRUTURA FUNCIONAL
As particularidades de um sistema técnico estão intimamente ligadas com a
função ou finalidade para qual o produto ou serviço prestado foi desenvolvida. A
busca por soluções em um projeto pode seguir uma linha de desenvolvimento
baseada na identificação das atividades realizadas durante o funcionamento do
produto, essas ações definem a estrutura funcional do sistema, ou seja, as
condições, equipamentos ou técnicas empregadas na tentativa de cumprir o
propósito final do produto.
A estruturação funcional do produto auxilia na escolha dos componentes e
subsistemas, pois divide a totalidade do projeto em áreas menores capazes de serem
analisadas individualmente e de maneira especifica segundo suas características.
2.1.1 ASPECTOS DA MODULARIZAÇÃO COM OUTROS PRODUTOS
A modularização ou modularidade representa a característica de alguns
sistemas e subsistemas de serem desenvolvidos e fabricados de maneira individual,
mas que atendam especificações que permitam sua integração para formar um único
produto, uma variação de diferentes produtos ou diferentes tipos de montagem
entre produtos pertencentes a uma mesma família.
O aspecto de modularidade do projeto é necessário quando se deseja
promover a criação de um sistema que apresente mais de uma unidade de
movimentação linear para permitir que o equipamento derivado da montagem
possua mais de um eixo de movimentação. A integração dos produtos possibilita a
criação de máquinas como tornos, fresadoras ou manipuladores resultantes da
compatibilidade dos produtos produzidos de forma independente, mas que foram
idealizados como este propósito.
Existem diferentes níveis de modularidade aplicados a produtos, estes
módulos podem ser classificados como componentes que formam diferentes
conjuntos entre si e são aplicados em uma plataforma básica. Subsistemas que
permitem sua combinação com outros módulos para formarem variações de um

30
mesmo produto ou mecanismos que juntos permitem diferentes montagens entre
uma série de produtos distintos ou similares.
No cenário do projeto, a modularização das unidades de movimentação
linear se relaciona com a capacidade de montagem entre suas estruturas com a
finalidade de formarem um equipamento com vários eixos de movimentação, sendo
que o agrupamento das unidades permita diversas configurações como no exemplo
da figura 7 onde duas unidades de movimentação (imagens ilustrativas) apresentam
as montagens com os eixos perpendiculares e concorrentes em dois layouts.
FIGURA 7 – Modularidade entre unidades movimentação linear
Portanto as medidas necessárias ao projeto para garantir a modularização
com outras unidades de movimentação estão relacionadas diretamente com as
informações que definem a interface entre os produtos, ou seja, os detalhes que
determinam as formas de conexão entre os módulos.
2.1.2 FUNÇÃO GLOBAL
Um sistema técnico é caracterizado por um equipamento que executa um
determinado processo ou uma sequencia de operações, sendo este equipamento
formado por diversos elementos que juntos são responsáveis por executar uma
determinada função que define o propósito da existência do sistema. Essa função
31
representa geralmente a atividade principal desempenhada pelo equipamento,
recebendo a denominação de função geral ou função global.
A função global do sistema técnico representa uma forma subjetiva da solução
para resolução dos problemas relacionados com o desenvolvimento do projeto de
produto, pois em geral encontra se de forma superficial. Dificilmente o projetista
consegue visualizar as transformações que as grandezas de entrada sofrem ao longo
do processo e como suas propriedades serão afetadas até o final das transformações
sejam elas atuantes sobre variáveis como energia, material ou informação.
Para obter a função global de um produto é necessário analisar as
especificações de projeto com o intuito de estabelecer como os clientes esperam que
o produto se comporte durante seu funcionamento e consequentemente as funções
desempenhadas nessa atividade. O conjunto de entrada e saídas presentes nos
sistemas técnicos periféricos ao produto também servem de indicativo para definição
da função global, que juntamente à interface com o usuário estabelecem, por
exemplo, as informações de entrada, comando, fontes de energia, acoplamento com
outros módulos e outras relações necessárias para o funcionamento do sistema.
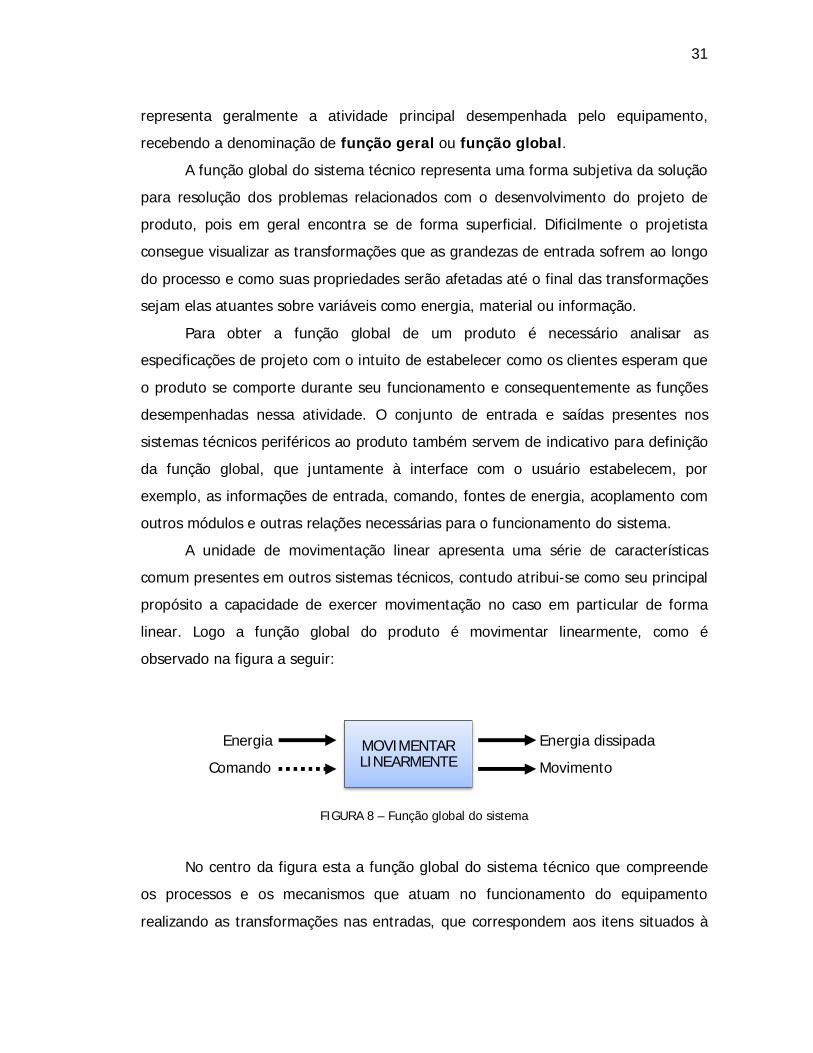
A unidade de movimentação linear apresenta uma série de características
comum presentes em outros sistemas técnicos, contudo atribui-se como seu principal
propósito a capacidade de exercer movimentação no caso em particular de forma
linear. Logo a função global do produto é movimentar linearmente, como é
observado na figura a seguir:
Energia Energia dissipada
Comando Movimento
FIGURA 8 – Função global do sistema
No centro da figura esta a função global do sistema técnico que compreende
os processos e os mecanismos que atuam no funcionamento do equipamento
realizando as transformações nas entradas, que correspondem aos itens situados à
MOVIMENTAR LINEARMENTE

32
direita do bloco central, em saídas do sistema durante fluxo dessas variáveis ao
longo da função geral.
2.1.3 ESTRUTURAÇÃO DO PRODUTO MECATRÔNICO
O produto mecatrônico é caracterizado pelo desenvolvimento em conjunto de
muitas áreas de conhecimento permitindo a integração de varias tecnologias. Logo o
seu desenvolvimento engloba uma série requisitos e habilidade por parte dos
envolvidos no processo. É buscando o a melhor forma de análise e de solução para
cada área de atuação que a equipe de projeto subdivide o produto e frentes de
desenvolvimento a eletroeletrônica e a mecânica.
A divisão do projeto da unidade de movimentação linear em uma estrutura
eletroeletrônica contendo os componentes eletrônicos, fontes energética, sistemas
sensoriais e de controle, assim como no caso da estrutura mecânica contento
acoplamentos, reduções, guias e perfis, facilitam a decomposição da função global
do sistema devido à abordagem mais focada e individual de cada área de
conhecimento. A figura 9 representa a divisão do produto mecatrônico em duas
estruturas distintas:
Energia Energia dissipada
Comando Movimento
FIGURA 9 – Estruturação do produto
Note que embora as estruturas do produto representem áreas de
desenvolvimentos distintas, ambas continuam pertencendo a função global
movimentar linearmente, mesmo com características bem particulares quanto a sua
atuação as duas têm como propósito garantir o funcionamento do sistema técnico. A
Estrutura Eletroeletrônica
Estrutura mecânica
MOVIMENTAR LINEARMENTE
33
linha escura que envolve as estruturas representa os limites do sistema, ou seja, a
área de representa efetivamente a função global, os termos externos a essa linha
passam a pertencer a outros sistemas técnicos periféricos ou denominam as variáveis
de entrada e de saída.
2.1.3 ESTRUTURAS FUNCIONAIS DO PRODUTO
A elaboração da função global do sistema técnico representa uma das etapas
essenciais para definir uma provável solução para o problema de projeto, contudo
seu estado inicial apresenta uma forma abstrata e condensada sobre as
transformações envolvidas no processo. Uma ferramenta de desenvolvimento que
tem como proposta diminuir a complexidade dessa função global é o chamado
método da síntese funcional.
A função global pode ser desdobrada de forma sucessiva em uma estrutura
com subfunções, e essas por sua vez podem ser divididas até o nível de funções
elementares. As subfunções e funções elementares fazem parte função global,
contudo cada função atua em um processo ou transformação especifico dentro do
sistema, em geral a informação, energia ou material que são entradas para a função
global seguem um caminho ou fluxo, onde essas variáveis são modificadas até
concluírem o ciclo do equipamento transformando-se em saídas.
2.1.3.1 ESTRUTURA FUNCIONAL ELETROELETRÔNICA
Em uma futura elaboração de um conceito para a unidade de movimentação
linear é necessário conhecer os métodos e equipamentos que a constituem, nessa
listagem técnica estão presentes os componentes do projeto que são responsáveis
por executarem ações relacionadas a princípios de funcionamento nos contextos
elétricos e eletrônicos. A esse grupo particular atribui-se a denominação de estrutura
eletroeletrônica.
A elaboração da síntese funcional visa auxiliar na obtenção dos elementos que
constituem este grupo por meio da identificação das subfunções que regem o
funcionamento eletroeletrônico do produto. As subfunções podem ser definidas com
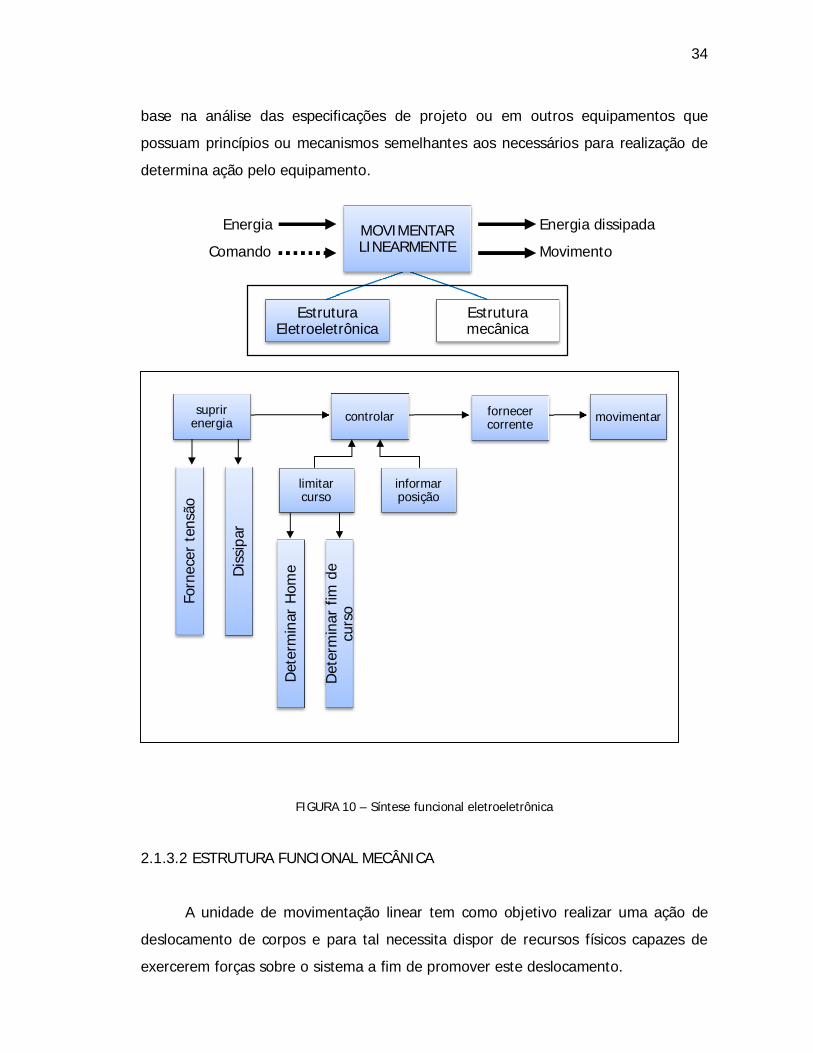
34
base na análise das especificações de projeto ou em outros equipamentos que
possuam princípios ou mecanismos semelhantes aos necessários para realização de
determina ação pelo equipamento.
Energia Energia dissipada
Comando Movimento
FIGURA 10 – Síntese funcional eletroeletrônica
2.1.3.2 ESTRUTURA FUNCIONAL MECÂNICA
A unidade de movimentação linear tem como objetivo realizar uma ação de
deslocamento de corpos e para tal necessita dispor de recursos físicos capazes de
exercerem forças sobre o sistema a fim de promover este deslocamento.
Estrutura Eletroeletrônica
Estrutura mecânica
MOVIMENTAR LINEARMENTE
suprir energia controlar fornecer
corrente movimentar
limitar curso
informar posição
Forn
ecer
ten
são
Dis
sipa
r
Det
erm
inar
Hom
e
Det
erm
inar
fim
de
curs
o
35
Diferentemente dos componentes eletrônicos, cujo funcionamento está
relacionado com os parâmetros eletromagnéticos presentes no circuito, a síntese de
funcionamento da estrutura mecânica é influenciada por fatores físicos como
carregamentos, atrito entre superfícies, velocidades de deslocamento, resistência dos
materiais e outras características típicas dos equipamentos mecânicos.
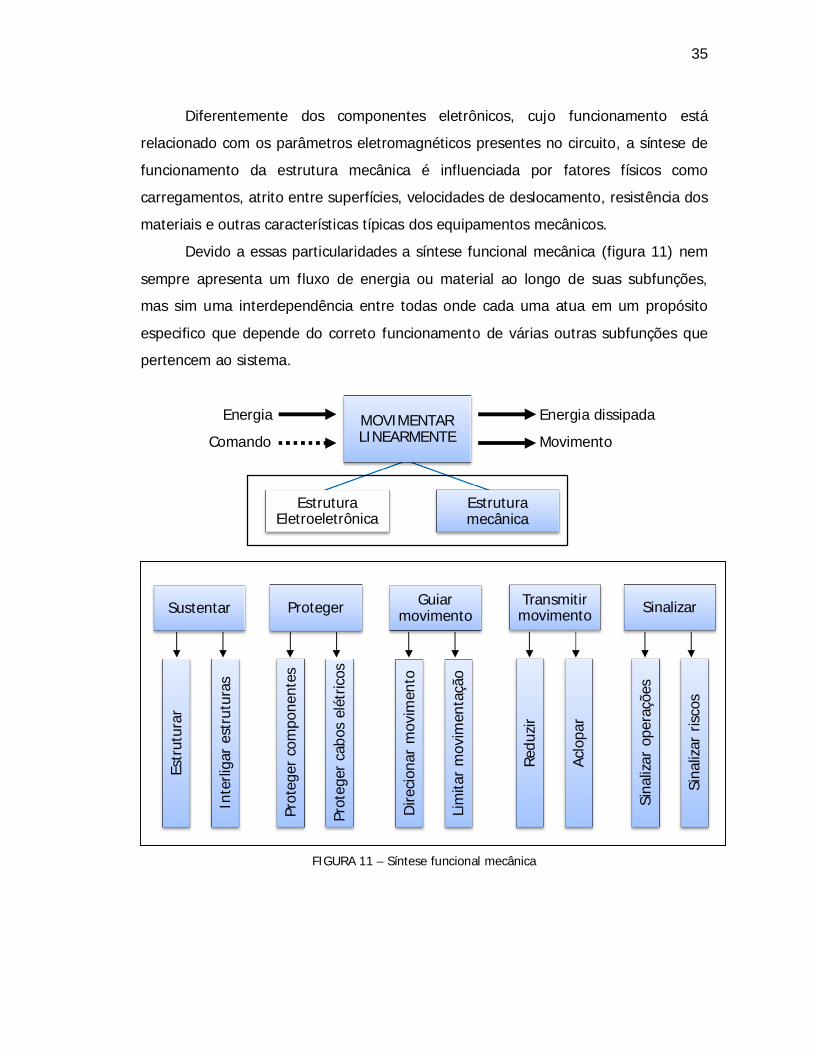
Devido a essas particularidades a síntese funcional mecânica (figura 11) nem
sempre apresenta um fluxo de energia ou material ao longo de suas subfunções,
mas sim uma interdependência entre todas onde cada uma atua em um propósito
especifico que depende do correto funcionamento de várias outras subfunções que
pertencem ao sistema.
Energia Energia dissipada
Comando Movimento
FIGURA 11 – Síntese funcional mecânica
Estrutura Eletroeletrônica
Estrutura mecânica
MOVIMENTAR LINEARMENTE
Sustentar Proteger Guiar movimento
Transmitir movimento Sinalizar
Estr
utur
ar
Inte
rliga
r es
trut
uras
Prot
eger
com
pone
ntes
Prot
eger
cab
os e
létr
icos
Dire
cion
ar m
ovim
ento
Lim
itar
mov
imen
taçã
o
Redu
zir
Aclo
par
Sina
lizar
ope
raçõ
es
Sina
lizar
ris
cos

2.2 CONCEPÇÕES
Com a definição da estrutura funcional do produto inicia-se a busca por
princípios de solução que atendam as especificações relacionadas a cada subfunção.
O agrupamento de diferentes soluções leva a formação de concepções alternativas,
que são diferentes formas de montagem e combinação de componentes com o
mesmo propósito de atender a função global da unidade de movimentação, mas com
características técnicas, financeiras e estéticas próprias.
O comparativo entre as concepções estabelece pontos fortes e fracos que
cada uma tem a oferecer perante o projeto, e qual delas pode ser adotada como
base para o processo de detalhamento final do produto.
2.2.1 CONCEPÇÕES ALTERNATIVAS DO PRODUTO
A elaboração de uma concepção para o produto exige o conhecimento das
especificações de projeto para determinar as expectativas a serem atendidas e da
síntese funcional da unidade de movimentação para direcionar as escolhas dos
artifícios utilizados para satisfazer as subfunções.
A busca por princípios de solução para a síntese funcional do produto pode ser
obtida com base na análise da literatura técnica, catálogos de fabricantes,
observação direta ou indireta de sistemas similares existentes ou pesquisa em
trabalhos acadêmicos disponíveis.
Embora os níveis de qualidade e eficiência encontrados no mercado permitam
várias possibilidades de alternativas para solução de determinada necessidade, vale
ressaltar as restrições relacionadas com o objetivo do projeto, a disponibilidade de
material, o acesso a processos de fabricação e a limitações financeiras que
determinam o custo beneficio adequado ao projeto.
2.2.1.1 CONCEPÇÕES ELETROELETRÔNICAS
A busca pelas alternativas pode ser generalizada a qualquer método disponível
para solução quando o problema abordado não pertence totalmente ao domínio de

37
conhecimento da equipe de projeto, nesse caso a análise dos casos exigem maior
aprofundamento técnico e consequentemente priorização em níveis mais elevados
desses itens.
Quando determinada função do sistema técnico apresenta princípios de
solução conhecidos ou familiares à equipe de projeto, é possível considerar de
possibilidade de realizar uma análise técnica superficial das soluções e centralizar os
esforços na comparação entre suas vantagens e limitações quando confrontadas com
as especificações do projeto.
Contudo para estabelecer os princípios de solução para a estruturação
eletroeletrônica do projeto se parte da análise das subfunções apresentadas na
figura 10 do item 2.1.3.1, que definem o funcionamento técnico do produto, cuja
definição de cada subfunção presente nessa figura pode ser conferida abaixo:
a) Suprir energia: fornecer energia elétrica aos componentes elétricos e
eletrônicos;
- Fornecer tensão: circuito ou dispositivo capaz de adequar os valores de
tensão obtidos da rede de alimentação para valores compatíveis aos
componentes do sistema.
- Dissipar: elemento que efetua a distribuição da energia em forma de calor
proveniente do processo de fornecimento para o ambiente externo;
b) Controlar: efetuar o controle das variáveis envolvidas no produto;
c) Limitar curso: controlar eletronicamente através de sensores a posição
atual e final da mesa de movimentação;
- Determinar home: Dispositivo que informa quando a mesa de
movimentação atingiu as coordenadas que indicam a posição de referência
para o sistema de controle, o chamado zero máquina;
- Determinar fim de curso: Conjunto de dispositivos de determinam quando
unidade móvel atinge o limite físico de movimentação, evitando assim a
colisão entre a mesa e a estrutura.
d) Informar posição: interfacear com o operador e o sistema de controle o
posicionamento da mesa a partir de um sensor que informe posicionamento
linear;

38
e) Fornecer corrente: circuito responsável pelo fornecimento de valores
elevados de corrente, utilizados para o acionamento do motor de passo,
comandados por um sinal de baixa potência;
f) Movimentar: função executada por um transdutor (dispositivo que
transforma energia elétrica em energia mecânica).
O conhecimento dos itens presentes na síntese funcional do produto permite
encontrar diversos princípios de solução para determinada necessidade do produto,
porém essas sugestões precisam ser organizadas de modo a facilitar a sua
visualização pela equipe de desenvolvimento possibilitando a geração de concepções
alternativas para desempenhar a função global do sistema.
Existem métodos sistemáticos para geração de concepções que permitem
organizar os princípios de solução encontrados na análise da síntese funcional do
produto, entre os métodos disponíveis foi escolhido o da matriz morfológica. Nela
estão identificadas as funções e subfunções da estrutura eletroeletrônica nas
primeiras colunas da matriz, seguidas de seus princípios de solução organizados de
forma independente, sem relação direta com os itens presentes em outras linhas.

39
Função/subfunção Solução A Solução B Solução C
Supr
ir en
ergi
a Fornecer tensão
Fonte estabilizada
Fonte chaveada
Baterias
Dissipar
Cooler
Dissipador Refrigeração
Controlar
Atmega 328
Família 8051
Atmel AVR
Lim
itar
Determinar home
Sensor Magnético
Sensor Mecânico
Sensor Óptico
Determinar fim de curso
Sensor Magnético
Sensor Mecânico
Sensor Óptico
Informar posição
Ultra som
Encoder
Potenciômetro
Linear
Fornecer corrente
Drive DCBMP
Drive SMC-U-ADV
L702B
Movimentar
Servo Motor
Motor DC
Motor de Passo Fonte imagens: arquivo pessoal.
QUADRO 4 – Matriz morfológica da estrutura eletroeletrônica
2.2.1.2 CONCEPÇÕES MECÂNICAS
A busca por princípios de solução à geração das concepções mecânicas do
projeto inclui uma pesquisa sobre as características de componentes oferecidos por

40
meio dos catálogos e sites disponibilizados pelos fabricantes de produtos mecânicos,
além dos exemplos apresentados na literatura técnica que demonstram técnicas e
mecanismos utilizados em equipamentos similares ou que possuem movimentação
linear em algum dos seus subsistemas.
Assim como na estrutura eletroeletrônica a base para a formulação de
possibilidades para resolver o problema parte do conhecimento da síntese funcional,
apresentada na figura 11 cujas subfunções estão relacionadas abaixo:
a) Sustentar: subfunção destinada a garantir a robustez mecânica do sistema
impedindo a influencia de forças ou momentos indesejáveis durante o
funcionamento do produto;
- Estruturar: elemento cuja responsabilidade é suportar e fixar os demais
componentes do sistema, sua montagem corresponde ao corpo do
equipamento;
- Interligar estrutura: técnica ou dispositivo de união que interliga as partes
que compõem o corpo do equipamento.
b) Proteger: grupo de elementos que ira assegurar a integridade de elementos
do sistema que de alguma forma possam sofre avarias devido ao processo
realizado pela unidade de movimentação durante seu funcionamento;
- Proteger componentes: método utilizado para evitar além dos danos
físicos resultantes de choques e impactos, o isolamento entre o usuário e
componentes energizados ou cortantes;
- Proteger condutores: evitar o cisalhamento, dobramento ou esmagamento
de fios e cabos elétricos durante o processo de movimentação das partes
móveis;
c) Guiar movimento: componentes relacionados aos fatores que influenciaram
na movimentação linear do produto;
- Direcionar movimento:
- Limitar movimentação: anteparo que restringe mecanicamente o
deslocamento da mesa;
d) Transmitir movimento: mecanismos que tem a função de perpetuar o
movimento fornecido por um dispositivo elétrico, adequando-o de forma a
permitir a movimentação linear ao final do processo;

41
- Reduzir: possibilita a modificação das razões entre velocidade e torque de
acionamento segundo a necessidade exigida pelo projeto
- Acoplar: garante a transmissão do movimento entre elementos separados
ou que venham a apresentar discordâncias de alinhamento entre o
alinhamento de seus eixos.
e) Sinalizar: função que visa informar o usuário sobre condições e
características do produto que são consideradas importantes durante a
manipulação ou utilização do sistema;
- Sinalizar operações: tem objetivo de alertar o usuário sobre a condição
em que o aparelho se encontra;
- Sinalizar riscos: expõem as situações ou áreas que possam vir a afetar
direta ou indiretamente a integridade do operador.

42
Função/subfunção Solução A Solução B Solução C
Sust
enta
r Estruturar
Perfil modular
Metalon
Perfil em L
Interligar estrutura
Placas
Parafusos Cantoneiras
Prot
eger
Proteger componentes
Gabinete metálico
Acrílico
Plástico
Proteger condutores
Esteira porta cabos
Calha
Espiral para fios
Gui
ar m
ovim
ento
Direcionar movimento
Bucha de esferas
Patins
Mancal
deslizamento
Limitar movimento
Parafusos
Anteparo polímero
Tran
smiti
r m
ovim
ento
Reduzir
Red. planetário
Engrenagens
Polias e correias
Acoplar
Acopla. Rígido
Acopla. Flexível
Ajuste sob pressão
Sina
lizar
Sinalizar operações
LEDs
Display
Sinal sonoro
Sinalizar riscos
Faixas
Placas
Etiquetas Fonte imagens: arquivo pessoal.
QUADRO 5 – Matriz morfológica da estrutura mecânica

43
2.2.2 SELEÇÃO E COMPARAÇÃO DAS CONCEPÇÕES
O princípio de solução apresentado nas matrizes morfológicas, tanto da
estrutura eletroeletrônica quanto da mecânica corresponde às diferentes
possibilidades de resolver determinada necessidade do projeto. Porém a sua seleção
não parte da escolha do método mais eficiente ou de menor custo, mais sim da sua
aplicação hipotética em uma concepção do produto.
Os componentes e métodos estão dispostos de forma aleatória na matriz
morfológica, ficando a cargo da equipe de projeto selecionar o conjunto de soluções
que possibilite a formação de sistema técnico. A seleção da equipe de projeto
fundamenta-se em seu conhecimento sobre os princípios de solução, nas orientações
presentes na literatura e nas compatibilidades encontradas entre as soluções
disponíveis.
Para ilustrar as concepções alternativas do produto, foi elaborado o quadro
abaixo que apresenta na primeira coluna as funções/subfunções e nas demais as
combinações tecnicamente possíveis entre os princípios de solução. Note que entre
as quatro concepções elaboradas uma delas é apresentada com o titulo concepção,
isso se deve ao método que adotado para seleção dessas concepções.
A equipe de projeto utiliza princípios intuitivos para escolher uma das
concepções elaboradas para servir de, essa concepção será apenas uma forma de
facilitar o processo de seleção que será abordado mais a frente. Vale ressaltar que a
função não representa a concepção final que será escolhida ou que tem a melhor
forma de solução, essa decisão será determina somente após o processo
comparativo.

44
Função/subfunção Concepção A Concepção B Concepção C Concepção
Supr
ir en
ergi
a Fornecer tensão
Fonte Chaveada Bateria Transformador Transformador
Dissipar Ventilação Dissipador Ventilação Cooler
Controlar Atmega 328 Atmel AVR Família 8051 Atmega 328
Lim
itar Determinar
home Sensor Óptico Sensor Magnético
Sensor Mecânico
Sensor Mecânico
Determinar fim de curso
Sensor Mecânico Sensor Óptico Sensor
Magnético Sensor
Mecânico
Informar posição Potenciômetro Linear
Encoder Ultra som Encoder
Fornecer corrente Controladora SMC-U-ADV L702B Controladora
SMC-U-ADV Drive DCBMP
Movimentar Motor DC Servo Motor Motor de Passo
Motor de Passo
QUADRO 6 – Concepções da estrutura eletroeletrônica
A elaboração do produto inclui a integração dos princípios e tecnologias
adotadas no módulo eletroeletrônico e no modulo mecânico, o que exige uma
compatibilidade entre os métodos que são aplicados. O desenvolvimento de projeto
da unidade de movimentação linear leva em conta este principio quando são
elaboradas as concepções mecânicas do produto como as observadas no quadro 7:

45
Função/subfunção Concepção A Concepção B Concepção C Concepção
Sust
enta
r Estruturar Perfil de Alumínio
Perfil de Alumínio
Perfil de Alumínio
Perfil de Alumínio
Interligar estrutura Parafuso Placas Parafuso Placas
Prot
eger
Proteger componentes Acrílico Metálico Metálico Metálico
Proteger condutores
Esteira porta cabos Espiral Calha Esteira porta
cabos
Gui
ar
mov
imen
to Direcionar
movimento Bucha de esferas Patins Mancal de
Deslizamento Patins
Limitar movimento Parafusos Anteparo de
Polímero Parafusos Parafusos
Tran
smiti
r m
ovim
ento
Reduzir Engrenagens Red. planetário
Red. planetário
Polias e correias
Acoplar Acopla. Rígido
Ajuste sob pressão
Acopla. Flexível
Ajuste sob Pressão
Sina
lizar
Sinalizar operações Display Sinal sonoro Sinal sonoro Led
Sinalizar riscos Faixas Placas Faixa Etiquetas
QUADRO 7 – Concepções da estrutura mecânica
Após a definição das concepções alternativas para o produto é possível
empregar métodos sistemáticos capazes de fornecerem um parecer resultante da
comparação entre as possibilidades analisadas. Um dessas técnicas é a matriz da
decisão ou método de Pugh, onde a concepção adotada como recebe valor nulo
para cada um dos critérios avaliados, as demais concepções são comparadas com o
referencial e recebe valor positivo (+) quando atendem o critério de forma mais
eficiente, valor (-) quando satisfazem menos a necessidade ou valor igual (S) quando
a concepção avaliada e a de produzem o mesmo resultado para o critério de
comparação.
Os critérios de comparação estendem-se a qualquer requisito que defina o
produto, expectativas dos clientes do ciclo de vida do produto, aspectos de
marketing e de mercado entre outros. Para equipe de desenvolvimento optou por
utilizar os requisitos dos clientes, apresentados no item 1.5 do projeto informacional
como critério para realizar a comparação entre as concepções na matriz da decisão
apresentada no quadro a seguir.

46
Critério Concepção A
Concepção B
Concepção C Concepção
Confiabilidade - - S 0
Ergonomia S S S 0
Estética + + S 0
Segurança + S S 0
Padronização - S S 0
Manutenção - + - 0
Transporte + - - 0
Montabilidade - + - 0
Disponibilidade de material - - - 0
Organização S - S 0
Acessibilidade - S + 0
Movimento linear S S - 0
Dimensões S + + 0
Modularização - S S 0
Peso + S - 0
Baixo custo - - - 0
Baixa vibração - + + 0
Rede 220 V S - S 0
Total (+) 4(+) 5(+) 3(+) 0
Total (-) 9(-) 6(-) 7(-) 0
Total Global -5 -1 -4 0 QUADRO 8 – Matriz de decisão (método de Pugh)
A análise do método de Pugh relaciona o quanto uma concepção atende
melhor a lista de critérios quando comparada com na matriz, isso é determinado
pelo numero de valores (+) e valores (-) listados na linha Total (+) e na linha Total
(-) respectivamente. A soma das linhas com os valores positivos e negativos gera um
numero apresentado na linha Total Global, que caso seja negativo significa que a
concepção apresenta um nível de satisfação de critérios menor que a concepção de.

47
Caso o resultado seja zero, tanto a concepção avaliada quanto a de apresentam
desempenho geral semelhante. Com um resultado positivo no Total Global, conclui-
se que a concepção alternativa possui um potencial superior ao da concepção de em
relação ao cumprimento dos critérios avaliados na matriz da decisão.
2.2.3 APRESENTAÇÃO CONCEPÇÃO ADOTADA
Determinada a melhor concepção, a próxima etapa no desenvolvimento do
projeto é descrever a importância de cada componente bem como suas funções no
funcionamento produto.
2.2.3.1 MODELO ELETROELETRÔNICO
A concepção adotada para o módulo eletroeletrônico partiu da escolha de
elementos cujo funcionamento procura atender necessidades dos clientes, porém
atendendo uma relação de custos, estabelecidas na fase do projeto informacional.
No que diz respeito à função suprir energia a equipe de projeto optou por usar um
transformador, que ocupe pouco espaço, mas que atenda a demanda de corrente do
sistema. O principio básico de funcionamento do transformador, atua na alteração
dos níveis de tensão baseados na relação entre o numero de espiras presentes no
enrolamento primário e secundário.
Em virtude da arquitetura do modulo eletro eletrônico, surge à necessidade
implementação de novos subsistemas com o objetivo de garantir o funcionamento
dos circuitos e componentes utilizados na concepção adotada. Um desses exemplos
é a utilização de uma fonte de alimentação de cinco volts para o micro controlador
Atmega 328. Para dissipar a energia não utilizada integralmente pelo sistema, que na
maioria das é vezes convertida na forma de calor, fato que poderia trazer prejuízos
para o funcionamento do produto, a solução encontrada foi à implementação de um
cooler com o objetivo de gerar uma ventilação forçada para o sistema.
A função de controle tem o objetivo de gerenciar a ações necessárias para
que o sistema execute comandos como determinar movimentos, acionamento dos
sistemas de emergência, repassar informações o operador entre outras atividades

48
exigidas pela unidade de movimentação linear. Para executar essa função é
necessária a existência de um componente com a finalidade de captar sinais,
interpretá-los e tomar decisões baseadas em parâmetros predefinidos, essa função é
atribuída ao micro controlador Atmega 328.
Quando se trata em coordenar a movimentação, ou seja, definir os limites ao
movimento, bem como posicionar a unidade de movimentação de acordo com os
comandos enviados pelo operador é necessário que o sistema possua um dispositivo
capaz de informar o posicionamento de um determinado componente e relação a sua
estrutura de fixação para que o micro controlador execute a parada do movimento a
fim de evitar a colisão entre as partes envolvidas no processo. O sinal enviado e
originário do fechamento de contatos elétricos de uma chave de fim de curso, que é
acionada mecanicamente quando um corpo exerce uma força de deslocamento sobre
uma haste posicionada na lateral do sensor.
O controle de movimentação não inclui apenas a identificação dos limites de
curso, mas também a posição ocupada pela mesa de deslocamento em qualquer um
dos pontos de sua trajetória. Para que micro controlador determine a posição real da
mesa é necessário que alem de identificada a posição de home por um sensor
mecânico, é preciso gerar um sinal em forma de pulso eu quando contabilizados
informam a quantidade de deslocamentos sucessivos entre cada pulso, essa
necessidade pode ser atendida pela utilização de um encoder.
Uma das desvantagens do sistema e controle adotado é o fato dos sinais
emitidos para o controle de outros dispositivos possuírem uma baixa potência de
saída. Esse inconveniente exige a presença de um circuito intermediário capaz de
utilizar os comandos de baixa corrente e baixa tensão para manipular sinais de saída
capazes de suprirem as necessidades energéticas de elementos que consomem altas
correntes. Nesse cenário de inter faciamento entre o sistema de controle e os
dispositivos de acionamento surge à presença de drive, cujo a função alem de
garantir o funcionamento do motor de passo com base nos comandos do micro
controlador e de garantir a segurança de isolamento entre os circuitos de alta e baixa
tensão do sistema.
Como o objetivo principal do produto é movimentar- se linearmente, esta ação
é realizada por um dispositivo conhecido como motor de passo, um componente

49
preciso e referenciado para utilização em vários projetos, cujo principal função e
gerar rotação através de acionamento por sistemas digitais. Garantida a escolha de
todos os componentes funcionais do modelo eletro eletrônico, a próxima etapa e
descrever o funcionamento de cada um deles neste projeto, o que fica por
responsabilidade do projeto preliminar.
2.2.3.2 MODELO MECÂNICO
Assim como o modelo eletro eletrônico, a parte mecânica do projeto também
passou por um processo de avaliação, visando buscar soluções para a realização das
funções adquiridas por meio dos requisitos dos clientes, que representa a base de
decisões do projeto.
Para que o produto tome forma, é necessário que este tenha uma estrutura
que alem de caracterizar o projeto, também possa sustentar todas as suas partes
funcionais. Tal estrutura será construída a partir da utilização de perfis de alumínio,
pois trata se de um ótimo material, com um peso relativamente baixo em relação a
materiais como aço e com uma grande resistência a fatores externos que possam
levar a danificação do material. A fixação dos elementos estruturais é atribuída pela
utilização de elementos chamados de cantoneiras, que proporcionaram a solides do
corpo do produto.
Tratando–se de um produto que envolve uma parte eletrônica que por sua
vez, possui uma estrutura com a presença de muitos componentes extremamente
frágeis, por esse motivo é necessário o desenvolvimento de um cabinete metálico
que possa abrigar tais estruturas, impedindo que estas sofram qualquer contato com
elementos ou ações cotidianas que possam danificadas. Já os elementos condutores,
como fios e cabos serão envolvidos por uma esteira porta cabos, que permitirá a
estes alem da sua proteção, uma maior flexibilidade e segurança ao sistema e para
aqueles que estiverem em contato com o mesmo.
A função de guiar o movimento será realizada por um conjunto de guias
lineares e patins, sendo que as guias ficaram fixadas aos perfis de alumínio, criando
uma superfície para o deslizamento dos patins acoplados a mesa de movimentação,
proporcionando assim o movimento desejado. Alem de dispor de um dispositivo que

50
forneça a limitação do movimento eletronicamente, caracterizado pela utilização de
sensores, que como função enviar um sinal ao micro controlador dizendo a este que
o movimento chegou ao seu fim, o produto também tem uma maneira mecânica de
interromper este movimento, através de um parafuso que não permite que a
unidade de movimentação avance este ponto determinado com o fim de curso.
Um importante sistema, que acoplado ao motor permite a este um maior
torque, ou seja, uma maior força de torção é conhecido por redução, que neste
projeto será realizado por um conjunto de polias e correia. Essas polias serão
acopladas aos seus respectivos eixos por meio de um ajuste sobre pressão, evitando
assim a utilização de um terceiro elemento de ligação.
Para finalizar as funções da parte mecânica, vale ressaltar que esta também
vai abrigar elementos com a função de sinalizar o funcionamento do produto. Esta
sinalização será de responsabilidade de um conjunto de LEDs, eu variando seu
estado índia se o sistema esta em operação ou não. A fim de garantir a integridade
do operador serão utilizadas faixas que sinalizarão os riscos oferecidos pelo sistema,
evitando assim possíveis acidentes.
2.2.4 AVALIAÇÃO DA CONCEPÇÃO ADOTADA
Finalizada a etapa do projeto conceitual a equipe de projetistas tem como
resultado ou saída da fase a concepção do projeto que é um importante passo para
que este possa ser fabricado. Utilizando todas as ferramentas de avaliação de
atributos de projetos, podemos definir soluções para cada uma das função do
produto, e o mais importante que estas soluções expressam todas as necessidades
estabelecidas pelos clientes. Assim como tudo na área de projetos, a concepção aqui
desenvolvida também possui seus pontos positivos e negativos.
Os pontos positivos são muito satisfatórios, visto que o produto apresenta um
peso baixo, e de acordo com as relações de custo estabelecidas pela equipe temos
um baixo custo envolvido na sua construção, ressaltando que muitos materiais são
disponibilizados pela instituição de ensino o IFSC.
Já os pontos negativos esta atribuído ao aumento do numero de componentes
que serão utilizados para realizar uma determinada função, haja visto que no

51
mercado existem componentes que por si só realizam essas funções. Como por
exemplo, ao invés de utilizarmos um conjunto de polias e correia sincronizada para a
função de redução, poderíamos utilizar um redutor planetário que faria sozinho o que
três elementos fazem juntos, porém seu custo é alto e não há disponibilidade deste
elemento na instituição.

3 PROJETO PRELIMINAR
Definida a concepção do projeto, a próxima etapa no desenvolvimento do
trabalho consiste no estabelecimento do layout final do produto e a determinação de
parâmetros técnicos e econômicos, a esta fase se da o nome de projeto preliminar.
Como principais atividades desta fase, temos o a identificação de fatores
importantes para preparar o produto para sua fabricação. Estes fatores se
caracterizam, por exemplo, pela definição do tipo de material que será utilizado em
cada uma das partes do produto, dimensionamento das estruturas construtivas e de
seus componentes sejam eles externos ou internos, os tipos de elementos de
fixação, os processos de fabricação envolvidos, tolerâncias, cálculos para definir as
forças ou outras variáveis envolvidas no funcionamento do produto, definição de
fornecedores entre outras.
Efetuadas todas as atividades, a equipe de projeto deve se reunir com o
objetivo de definir os custos do projeto, ou seja, estabelecer uma relação de
componentes mecânicos ou eletrônicos que devem ser adquiridos, analisar o quanto
será gasto com sua compra e se o montante se adapta as relações de custos
proposta pelo grupo. Vale ressaltar a presença da intuição de ensino no fornecimento
de materiais, visto que alguns estão disponíveis nos laboratório ou em outros
projetos que não serão mais utilizados.

3.1 ESTRUTURA ELETROELETRÔNICA
A estrutura eletroeletrônica da unidade de movimentação precisa atender a
requisitos que caracterizam este tipo de produto, conseqüentemente seu
desenvolvimento parte da necessidade de circuitos e componentes que passam
garantir além do acionamento de uma fonte de movimento (motor) o controle sobre
a sua velocidade de sentido de rotação, baseando-se é claro em pontos referenciais
que permitem ao sistema identificar uma posição seu curso de trajetória.
O aprofundamento dos princípios adotados para construção da concepção
escolhida na fase de projeto conceitual engloba uma abordagem técnica do seu
funcionamento e como conseqüência o aparecimento de elementos periféricos ao
sistema. Esses elementos periféricos são responsáveis por integrarem as soluções
em um único layout de projeto permitindo que suas funcionalidades possam ser
adaptadas e utilizadas para cumprir o funcionamento da unidade de movimentação
linear. A inclusão de novos componentes que não estão citados no projeto conceitual
é, portanto um complemento necessário para união dos princípios de solução
encontrados para o problema de projeto.
Entre as ferramenta utilizadas auxiliar na elaboração e testes dos circuitos
eletrônicos destaque o software licenciado Proteus1 versão 7.6, disponibilizado nos
laboratórios da instituição para o desenvolvimento de esquemáticos e simulações no
ambiente ISIS e para a elaboração de layouts para placas de circuito impresso no
aplicativo ARES.
3.1.1 FUNÇÃO SUPRIR ENERGIA
O fornecimento de energia para o sistema é considerado um ponto crítico do
projeto, pois grande maioria dos componentes presentes no modulo eletroeletrônico
dependem de uma fonte de alimentação para executarem seu funcionamento. As
soluções encontradas para suprir essas necessidades energéticas e garantir que os
processos envolvidos em sua adequação (alteração dos níveis de tensão e corrente
1 Proteus 7.6, ISIS e ARES são marcas registradas da Labcenter Electronics, todos os direitos são reservados.
54
ao longo do circuito) não apresentam resultados negativos sobre os demais
componentes.
3.1.1.1 FORNECER TENSÃO
Considerando os sistemas e componentes eletroeletrônicos que constituem a
unidade de movimentação e necessitam em algum momento de serem alimentos
para que possam executar suas funções, a concepção adotada possui as seguintes
necessidades de suprimento de energia:
a) 5V CC para alimentação do microcontrolador;
b) 5V CC para alimentação de LEDs;
c) 5V CC para alimentação do encoder;
d) 5V CC para alimentação do cooler
e) 18V CA para alimentação do drive do motor de passo.
Em comuns com todas as demandas apresentadas anteriormente tem-se o
fato da fonte primária de energia ser a rede de alimentação local, que no Brasil
segue os padrões de tensão com 110 ou 220 volts e corrente do tipo alternada com
frequência de 60 Hz. Nesse caso fica evidente a necessidade de um sistema de
adequação para que os componentes e dispositivos que utilização uma tensão
continua de 5V possam ser alimentados pela rede local.
Dentro do circuito responsável por disponibilizar uma saída de cinco volts, o
primeiro dispositivo utilizado para redução da tensão é o transformador. Os trafos-
outra denominação utilizada para transformadores- são elementos constituídos por
um núcleo magnético comum a duas bobinas, nessa situação se diz que os
enrolamentos são mutuamente acoplados, segundo David E. Johnson (1994, p. 412)
em uma passagem de corrente em um dos enrolamentos, no caso devido a sua
ligação na rede de 220V, produz uma tensão induzida no outro enrolamento que será
proporcional a relação entre o numero de espiras presentes em cada uma das
bobinas, representada pela equação a seguir:

55
2 1
1 2
V NV N
(1)
Em que:
푉 e 푉 - tensões no secundário e primário, respectivamente;
푁 e 푁 - numero de espiras do secundário e primário, respectivamente.
A denominação dos enrolamentos em primário e secundário referencia o
enrolamento de entrada que se liga a rede local e o enrolamento de saída que
disponibiliza um sinal de tensão e correntes diferentes. O Trafo disponibilizado para o
projeto possui três fios que estão ligados ao enrolamento primário, e três fios
conectados a saída da bobina secundaria como pode ser conferido na figura a seguir:
FIGURA 12 – Esquemático de ligação do trafo 9+9V.
No esquemático da figura 12 nota-se o isolamento do fio amarelo, em um
circuito tradicional este fio estaria ligado a uma chave que comutaria a ligação da
rede para apenas um dos dois estágios da bobina primaria caracterizando um circuito
preparado para uma alimentação na tensão de 110V. Contudo, na condição de uso
didático essa possibilidade de ligação é suprimida para preservar o trafo de
incidentes, geralmente destrutivos, provenientes de seleção errônea da tensão de
alimentação em alguma etapa do projeto construtivo ou em uma ocasião de
utilização.
O enrolamento secundário possui uma terminação ou tomada central
representada pelo fio preto o que possibilita a divisão do potencial elétrico presente
entre as extremidades da bobina, essa característica define a nomenclatura do trafo
como sendo 9+9V. Entre cada um dos fios verdes e o preto existe uma tensão de
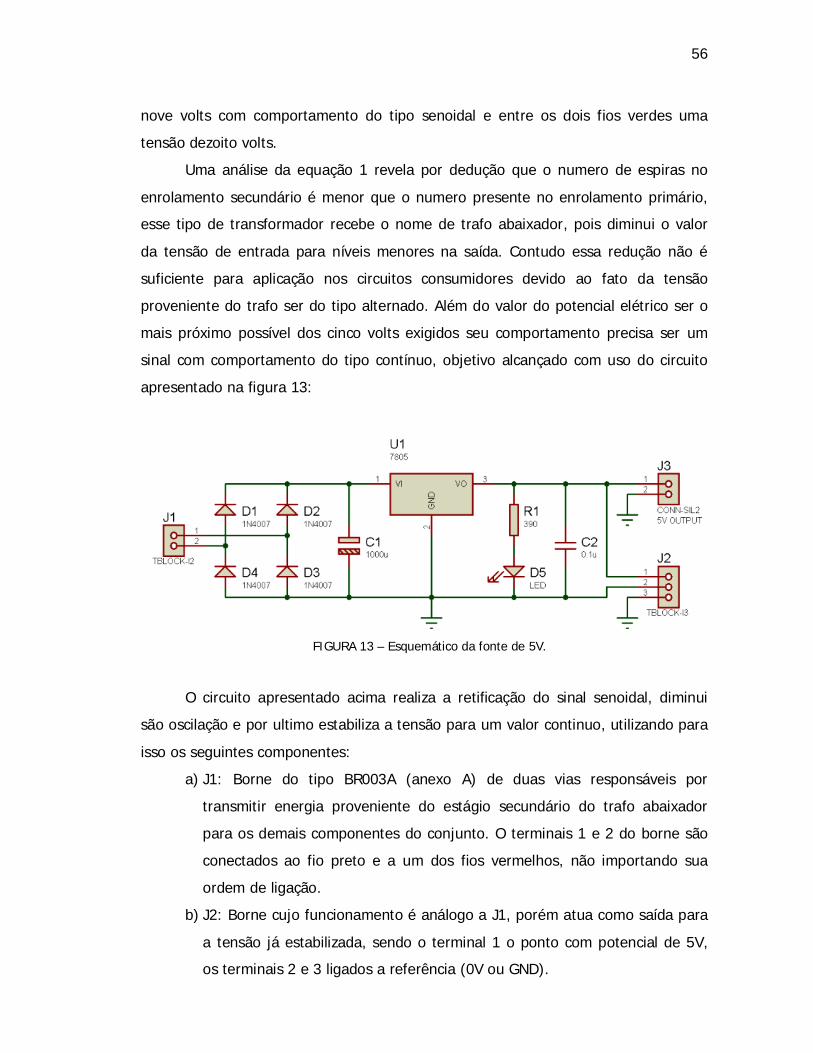
56
nove volts com comportamento do tipo senoidal e entre os dois fios verdes uma
tensão dezoito volts.
Uma análise da equação 1 revela por dedução que o numero de espiras no
enrolamento secundário é menor que o numero presente no enrolamento primário,
esse tipo de transformador recebe o nome de trafo abaixador, pois diminui o valor
da tensão de entrada para níveis menores na saída. Contudo essa redução não é
suficiente para aplicação nos circuitos consumidores devido ao fato da tensão
proveniente do trafo ser do tipo alternado. Além do valor do potencial elétrico ser o
mais próximo possível dos cinco volts exigidos seu comportamento precisa ser um
sinal com comportamento do tipo contínuo, objetivo alcançado com uso do circuito
apresentado na figura 13:
FIGURA 13 – Esquemático da fonte de 5V.
O circuito apresentado acima realiza a retificação do sinal senoidal, diminui
são oscilação e por ultimo estabiliza a tensão para um valor continuo, utilizando para
isso os seguintes componentes:
a) J1: Borne do tipo BR003A (anexo A) de duas vias responsáveis por
transmitir energia proveniente do estágio secundário do trafo abaixador
para os demais componentes do conjunto. O terminais 1 e 2 do borne são
conectados ao fio preto e a um dos fios vermelhos, não importando sua
ordem de ligação.
b) J2: Borne cujo funcionamento é análogo a J1, porém atua como saída para
a tensão já estabilizada, sendo o terminal 1 o ponto com potencial de 5V,
os terminais 2 e 3 ligados a referência (0V ou GND).

57
c) J3: Borne de saída para tensão de cinco volts, porém com tipo de conector
diferente, sua função é de alimentar o cooler responsável pela refrigeração
do sistema.
d) C1: capacitor do tipo eletrolítico responsável por diminuir o ripple
(ondulação) dos semiciclos positivos retificados pelos diodos evitando
quedas bruscas de tensão após os picos dos semiciclos;
e) C2: Capacitor de polipropileno que filtra ruídos presentes na saída dos
reguladores de tensão e também evita quedas bruscas de tensão quando
são ligadas cargas à fonte de alimentação;
f) D1 a D4: Diodos retificadores que tem como função realizar o isolamento
dos semiciclos positivos do sinal senoidal proveniente do secundário do
trafo. Sua montagem - com quatro diodos - é conhecida como ponte
retificadora de onda completa;
g) D5: LED (um tipo e diodo que emite luz visível) de cor vermelha que indica
a presença de uma diferença de potencial na saída do regulador de tensão,
subentendendo que a fonte de alimentação está ativa.
h) R1: resistor cuja função é limitar a tensão e a corrente sobre o LED até os
níveis permissíveis seu funcionamento, garantindo a vida útil e a segurança
do componente;
i) U1: Circuito integrado LM7805 responsável pelo ultimo estagio de
estabilização da tensão e por regular a tensão para cinco volts. Seu
encapsulamento possui três terminais para entrada (1), GND (2) e saída
para a tensão estabilizada (3);
A fonte possui um papel relativamente importante no produto, pois além de
alimentar a maioria dos componentes (com exceção do circuito de potência) fornece
a tensão necessária para o funcionamento do microcontrolador que é um elemento
fundamental para o funcionamento da unidade. Por este motivo a fonte deve
fornecer independente das condições de consumo, uma tensão constante e
estabilizada. Então, para o dimensionamento da fonte foram considerados alguns
requisitos definidos pela equipe de projeto com base na análise do restante do
circuito, entre eles uma meta para o fornecimento de corrente na ordem de 500 mA.

58
Este valor foi calculado com base na quantidade de componentes alimentados
por esta fonte de tensão de cinco volts considerando a corrente consumida por oito
LEDs (80 mA), a corrente consumida pelo microcontrolador em uma situação
hipotética de consumo extremo onde seis saídas forneceriam a corrente em valor
máximo (40 mA cada uma), a corrente de 120 mA drenada pelo cooler e mais a
corrente consumida pelo sistema de encoder totalizando uma demanda de corrente
de 360 mA. Considerando ainda a inclusão de novos componentes em possíveis
modificações adicionou-se uma margem de 8% a mais na corrente calculada para
atuar como faixa de segurança totalizando o valor meta de fornecimento para a
fonte.
Em projetos didáticos é comum ocorrer à fabricação em placas separadas de
cada tipo de circuito dedicado a determinada função, assim a fonte de alimentação
possuirá uma placa individual que a manterá isolada do circuito restante sendo sua
comunicação realizada apenas por meio dos fios instalados entre os conectores de
entrada e saída como pode ser observado na figura2 a seguir:
FIGURA 14 – Layout da placa para a fonte de 5V.
A figura ilustra a visualização da placa ao final do processo de modelagem no
software onde e possível distinguir as trilhas (traços em azul escuro) que realizam as
ligações entre os componentes do circuito. O espaço que não apresenta trilhas é
2 A representação desta e das demais placas não estão apresentadas em escala real

59
preenchido pela “malha terra”, uma zona que esta conectada ao ponto de tensão de
referência do circuito (GND) e tem a mesma função das trilhas que é de conduzir os
sinais elétricos, porém com as dimensões de largura e comprimento limitadas pelo
layout de montagem dos demais elementos.
Na parte superior da placa é possível notar junto ao regulador de tensão
(componente U1) o desenho com hachuras em azul claro, ele representa a área
ocupada pelo dissipador selecionado para este layout de placa e os círculos
localizados no centro dos retângulos maiores a furação para os parafusos que iram
fixar o corpo do dissipador à placa, evitando forças resultantes sobre os terminais do
regulado 7805. É importante ressaltar que essa representação do dissipador não
existe nas bibliotecas do software de design, porém graças as ferramentas gráficas a
equipe pode desenvolver esse layout de componente com exclusividade para o
projeto.
Para uma melhor projeção da montagem dos componentes à placa após o
processo de fabricação utilizou-se o recurso de visualização em três dimensões
realizado pelo software. Esse recurso ajuda o projetista na distribuição dos
elementos sobre a placa alem de evidenciar possíveis colisões entre os componentes
do circuito como pode ser observado na figura 15:
FIGURA 15 – Layout 3D da placa para a fonte de 5V.

60
Na visualização em três dimensões da fonte de 5 volts é possível identificar os
bornes de entrada e saída, que são os cubos localizados a direita e a esquerda
respectivamente. A parte superior da placa, logo a acima do capacitor (componente
circular no centro) está destacada uma área em amarelo que corresponde ao espaço
destinado ao dissipador de alumínio que se une aos encapsulamento do regulador de
tensão por meio de um parafuso.
3.1.1.2 DISSIPAR
O processo de regulação da tensão utilizado na fonte de alimentação tem
como característica o uso de um valor de entrada acima do valor nominal de saída
nos terminais do CI regulador, segundo o fabricante essa discrepância é necessária
para que o componente possa obter uma saída constante mesmo que ocorram picos
de tensão na entrada do regulador.
Como os valores que entram no regulador são maiores que os de saída, isso
significa que parte da energia precisa ser redirecionada para algum lugar, os valores
de tensão excedentes são então dissipados na forma de calor pelo componente. A
capacidade de irradiar esse calor esta diretamente relacionada com a área
responsável pelo contato entre o componente o ambiente. Embora a maioria dos
componentes eletroeletrônicos seja construída tendo como base o silício, um material
com ponto de fusão muito acima dos 150°C recomendados pelos fabricantes, as
características elétricas fazem com que caso a temperatura ultrapasse valores
seguros o semicondutor seja destruído.
Para que ocorra a manutenção da temperatura são aplicados dispositivos e
técnicas capazes aumentarem o fluxo de energia que é dissipada durante o
funcionamento de um equipamento eletroeletrônico, sendo a utilização de
dissipadores a mais comum.
Entre as formas de dissipação que atuam sobre um dissipador, a que
apresenta maior influência no processo térmico é a por convecção, que ocorre pela
movimentação do ar que circunda o componente e pode ser relacionada pela
seguinte equação:

61
. .( )Q h A Ts Tf (2)
Onde:
Q - Taxa de calor dissipada [j/s];
h - Coeficiente individual de transporte de calor;
A- Área do dissipador;
Ts - Temperatura da superfície;
Tf - Temperatura do ar circundante.
Segundo a equação (2) as maneiras possíveis para que ocorra o aumento da
taxa de calor irradiada o que consequentemente reduziria a temperatura do
componente seria aumentar a área de contato do dissipador, o aumento do
coeficiente individual de transporte de calor, uma variável relacionada com a
geometria do dissipador ou pela passagem forçada de ar entre as aletas do
dissipador reduzindo a temperatura do ar circundante.
Como a maioria dos sistemas mecatrônicos prioriza o uso soluções compactas
e pelo fato de outros elementos da unidade de movimentação também apresentarem
dissipação de calor, como nos drive de acionamento, optou-se por incorporar um
cooler (figura 16) ao sistema eletroeletrônico ao invés de aumentar o
dimensionamento dos dissipadores já existentes ou disponibilizados pela instituição.
FIGURA 16 – Cooler.

62
O cooler atua como um exaustor que força um fluxo da parte interior do
gabinete para a atmosfera, como a pressão interna passa a ser menor que a
existente no exterior do sistema, a tendência natural e que o ar entre pelas
aberturas existentes no recipiente. O posicionamento estratégico das aberturas de
ventilação permite então estabelece uma corrente de fluxo interna que renova
constantemente o ar em contato com a superfície dos dissipadores, reduzindo a sua
temperatura de operação.
3.1.2 FUNÇÃO CONTROLAR
A função de controle tem como objetivo particular gerenciar as ações do
sistema com base em valores e ações predefinidos bem como no sensoriamento em
tempo real de algumas variáveis relacionadas à movimentação linear. A
responsabilidade de realizar essa ação foi atribuída ao microcontrolador da Atmel3,
empresa líder mundial no projeto e fabricação desse tipo de componente.
A Atmel possui uma ampla gama de produtos disponíveis para utilização em
praticamente todos os dispositivos e projetos existentes no mercado, adequando-se
a diversas aplicações que exigem o controle de dados e processos. Atualmente são
oferecidas soluções baseadas em:
a) Soluções AVR - Atmel AVR são microcontroladores de 8 e 32 bits que
oferecem uma combinação única de desempenho, eficiência de energia, e
flexibilidade de design. São baseados em uma arquitetura que facilita a
programcao em linguagem C e em liguagem Assembly, melhorando sua
adaptacao em novos projetos. A ampla familia AVR facilita a reutilização de
conhecimento ja aplicados em microcontroladores para melhorar seus
produtos e expandir seu produtos para novos mercados.
b) Soluções baseados em ARM - Atmel oferece uma grande variedade
produtos lidederes de utilizacao na industria como os AT91SAM. Os
microcontroladores ARM de 32 bit podem satisfazer as necessidades de
virtualmente qualquer dispositivo ou mercado. Flexível e altamente
3 Atmel, AVR, megaAVR e Atmega são marcas registradas da Atmel Corporation, todos os direitos reservados.
63
integrado, soluções Atmel baseados em ARM são projetadas para otimizar o
sistema de controle, conectividade com e sem fio, gerenciamento da
interface do usuário, consumo e facilidade de uso.
c) MCU Wireless – A empresea oferece uma gama de produtos baseados no
protocolos IEEE 802.15.4 e ZigBee, que garante uma certificaçao para sua
de soluções sem fio. Eles são baseados na família Atmel AVR e
microcontroladores AMR ricos de transceptores de Radio Frequencia.
d) Arquitetura 8051- Atmel possui um rico portfólio de microcontroladores com
base no conjunto de instruções 8051, combinando uma tecnologia
comprovada e testada com os mais recentes recursos e funcionalidades. Os
desenvolvedores podem escolher a partir de microcontroladores de 8 bits
baseado no núcleo de único ciclo AT89LP, bem como o MCS-51, padrão da
indústria, todos os dispositivos com tecnologias avançadas em Flash.
Dentro da gama de microcontroladores AVR, a Atmel oferece a família
megaAVR, uma série que apresenta características capazes de serem aplicadas em
projetos que exigem instruções quantidades de códigos e processamento mais
elevados. Entre as vantagens do Atmega estão:
a) Ampla família - megaAVR oferece aos clientes uma ampla seleção de
dispositivos em termos de memórias, conta pino e periféricos, permitindo a
reutilização de código e conhecimento entre os projetos.
b) Tecnologia picoPower – Prove ao megaAVR características de baixíssimo
consumo de energia graças aos modos de baixo consumo e sleep, que o
tornam ideal para aplicações com bateria ou onde a economia de energia é
critica.
c) Alta integração - Os recursos megaAVR incluem flash on-chip, SRAM,
EEPROM interna, SPI, TWI e USART, USB, CAN e LIN, escolha do oscilador
interno ou externo, e pinos de I/O para propósito geral. O elevado nível de
integração permite que os projetos com menor número de componentes
analógicos externos.

64
d) Funções análogas - capacidades analógicas avançadas, como a ADC, DAC,
sensor de temperatura e tensão de interno, um comparador analógico
rápido e um amplificador de ganho programável analógico.
e) Rápido desenvolvimento - megaAVR acelerar o desenvolvimento com a
programação de microcontroladores no sistema e depuração on-chip. Além
disso, seu método de programação facilita a programação durante o
processo de montagem e produção do projeto.
Por estas vantagens e pela familiaridade alcançada durante as aulas da
disciplina de Sistemas Digitais, a equipe de projeto optou pelo uso de um dos
microcontroladores da família AVRmega, o modelo Atmega 328P apresentado na
figura abaixo:
FIGURA 17 – Atmega 328P e seu esquemático
O Atmega 328P possui um encapsulamento do tipo DIP 28, numa menção os
28 pinos para este tipo de circuito integrado. Os terminais do tipo PB de PB0 a PB7
pode ser utilizadas como portas digitais de entrada ou saída, dependo das
configurações utilizadas para realizar o clock do microcontrolador as portas PB6 e
PB7 podem servir de entrada e saída para um oscilador, porém cada pino pode
assumir uma função especifica dependendo das configurações utilizadas.
As portas de PC0 até PC5 atuam como pinos I/O (do inglês input = entrada e
output = saída) do tipo analogias, ou seja, consegue realizarem leituras dos valores

65
presentes entre os níveis de tensão digitais zero ou cinco volts, embora possam ser
programas apenas como canais digitais. A porta PC6 caso o comando RSTDISBL do
microcontrolador não esteja programado, o pino é usado como reset, e não pode ser
utilizado como pino I/O.
Os pinos conectados as portas PD0 a PD7 atuam como saídas e entradas
digitais sendo que o pino PD0 também atua como receptor de dados (RXD) e o pino
PD1 (TXD) como conexão para saída de dados do microcontrolador para periféricos
externos. Os pinos PD3, PD5, PD6 e os pinos PB1, PB2 e PB3 possuem ainda o
recurso de atuarem como saída para a função PWM.
A configuração básica de montagem do Atmega 328P inclui apenas alguns
componentes necessários como pode ser observado no esquemático a seguir:
FIGURA 18 – Esquemática do circuito contendo o microcontrolador
No esquemático acima estão incluídos os componentes que fazem parte da
placa que conterá o microcontrolador e atuam para que ocorra a sua alimentação,
programação e comunicação com os circuitos periféricos, sensores e acionadores.
Uma breve descrição dos elementos presentes no esquema e suas funções estão
relacionadas abaixo:
66
a) J1, J2, J3 e J4: são bornes do tipo BR03 que realizam a conexão entre os
pinos I/O do microcontrolador e os fios condutores que trazem sinais de
outras placas ou sensores e também as informações enviadas aos
atuadores (drive e LEDs de sinalização);
b) J5: atua como porta para a placa externa de comunicação serial e gravação
do microcontrolador;
c) J6: borne para entrada de alimentação de cinco volts;
d) C1 e C2: capacitores que atuam juntamente com o cristal para fornecer o
sinal de clock para o microcontrolador;
e) C3: o pino AREF é uma referência externa de tensão para o conversor de
sinais analógico-digital do microcontrolador e C1 tem a função de atuar no
aumento da imunidade contra ruídos no sinal aplicado nesse pino;
f) D1: Para indicar que a placa está recebendo tensão da fonte de
alimentação este led permanece acesso;
g) R1: resistor que mantém o sinal na porta PC6 em nível lógico alto quando o
circuito de reset está ligado ao pino;
h) R2 e R3: resistores que limitam os valores de corrente nos pinos RXD e TXD
utilizados para comunicação seria do microcontrolador. Podem ser
eliminados caso o módulo de programação já possua estes componentes;
i) R4: limita a tensão e a corrente para o Led que indica a alimentação da
placa;
j) S1: chave do tipo buttton que ao ser pressionado leva o pino PC6 para nível
lógico baixo e caso sua duração seja maior que um ciclo de pulso ira gerar
um reset no sistema;
k) U1: microcontrolador Atmega 328P;
l) X1: é um cristal piezoelétrico que gera uma frequência de oscilação
utilizada pelo microcontrolador para configurar intervalos de tempo.
A elaboração do circuito apresenta certo grau de exclusividade para o projeto,
pois como o produto visa atender requisitos como baixo custo, algumas das
funcionalidades do microcontrolador são suprimidas para a fim de simplificar o
circuito, diminuir o numero de componentes e reduzir os processos e materiais

67
utilizados na fabricação. Estas características justificam, por exemplo, a
disponibilização de 12 portas das 23 portas I/O possíveis de serem utilizadas no
Atmega 328P. A organização dos conectores para essas entradas e saídas, além dos
outros componentes apresentados anteriormente pode ser observa na figura a seguir
que traz o layout elabora para a placa do microcontrolador.
FIGURA 19 – Layout da placa para o Atmega 328
A placa trás como características dimensionais um comprimento de
aproximadamente de 75 mm e uma largura cujo valor estimado em 38 mm é igual
ao da placa da fonte de alimentação de cinco volts, que além de garantir uma
compatibilidade estética entre as placas permite o alinhamento entre o conector de
saída da fonte e o conector de entrada de alimentação da placa do microcontrolador,
fato que reduz a utilização dos condutores que interligam as placas.
Assim como apresentado no layout da fonte de alimentação, a placa do
microcontrolador também utilizou em sua estratégia de projeto a visualização 3D
para garantir uma melhor percepção da distribuição dos componentes, apresentados
na figura 20:

68
FIGURA 20 – Layout 3D da placa para o Atmega 328P
3.1.3 FUNÇÃO LIMITAR
Promover a movimentação da unidade é um das funções fundamentais do
projeto, já que o principal objetivo é obter um deslocamento em uma trajetória
linear, contudo são necessários parâmetros que definam as etapas e comandos que
o sistema necessita para executar esta função.
O objetivo de limitar a movimentação não é necessariamente, no contexto do
projeto, impedir que as partes móveis realizem seu deslocamento, mas sim garantir
que essa mudança de posicionamento não conduza a uma situação de risco onde as
limitações do sistema estejam fora do controle do operador ou do circuito de
comando.
3.1.3.1 DETERMINAR HOME
Para o controle digital de movimentação de uma máquina são necessários
alguns parâmetros iniciais para que o sistema crie uma referência que atue como
ponto de origem para o processo de deslocamento. Em outras palavras é necessário
informar ao microcontrolador qual a posição em que a mesa da unidade encontra-se
durante a partida inicial de funcionamento. Determinar um ponto de origem para um

69
sistema de movimentação é informar ao controlador que as partes móveis estão
situadas em uma posição conhecida zero maquina ou home.
Efetuar a função home significar enviar um comando que ira realiza uma
movimentação da unidade até um ponto onde um sensor ativo indicará ao
microcontrolador quando for atingida a posição de home. Ao final da ação será
definido o ponto de origem para as relações de deslocamento que são exigidas pelo
programa em execução.
O sensor que possui a responsabilidade de informa a posição de home ao
microcontrolador é uma chave de fim de curso mecânica (figura 21) da marca ZE
que possui três terminais elétricos. Um deles corresponde ao comum, em sua
aplicação no projeto ele está conectado permanentemente ao GND do sistema
elétrico, embora em outras aplicações este terminal possa ser ligado ao Vcc ou Vca.
FIGURA 21 – Chave de acionamento mecânico
Os demais terminais correspondem ao NO (normalmente aberto) por onde
não ocorre a passagem tensão devido ao fato de não haver a proximidade entre os
contatos elétricos desse terminal e o comum e ao NC (normalmente fechado) por
onde há um circuito que permite a ligação entre o terminal NC e o comum devido à
ligação física entre os contatos elétricos de cada terminal.
Na parte superior da chave apresentada pela figura 21 está localizada uma
alavanca metálica que ao sofrer um esforço resultante da aplicação de uma força
aplicada em sua extremidade livre provoca a movimentação de um pino (detalhe
vermelho entre a alavanca e o corpo da chave) que ira deslocar um contato elétrico
móvel provocando a inversão de estado do terminal NC que passara a ser aberto e

70
do terminal NO que se interligara ao comum. A partir do momento de a força sobre a
alavanca cessa uma mola interna realiza o retorno dos contatos elétricos na situação
de equilíbrio quando NC bloqueia e NO permite a passagem da tensão.
3.1.3.2 DETERMINAR FIM DE CURSO
Determinar o ponto de origem para servir de referência o microcontrolador
permite ao programa definir os comandos que serão efetuados entre cada etapa do
deslocamento. Quando o ponto de home é definido, é possível, por exemplo,
estipular o máximo deslocamento em cada um dos sentidos de movimentação da
mesa a fim de prevenir uma possível colisão entre as partes envolvida e também o
travamento súbito do sistema de transmissão.
Como as conseqüências relacionadas ao extrapolamento do curso efetuado
pela mesa poderiam provocar além da perda de sincronismo do sistema, uma
danificação dos componentes mecânicos, é de praxe agregar junto à determinação
da posição de home, os limites de movimentação linear executada pelo
equipamento.
Assim como ocorre no sensoriamento da posição de home, as chaves de
contato mecânico também podem ser utilizadas pelo microcontrolador para
informarem o momento que a mesa intercepta uma coordenada próxima ao limite
máximo permitido. É importante ressaltar que as chaves de fim de curso atuam de
maneira preventiva, evitando a ocorrência de situações que possam oferecer algum
risco ao operador ou ao equipamento, constituído dessa forma além de uma
referência de posicionamento, um dispositivo de segurança importante para o
funcionamento sistema.
Cada sensor de fim de curso será instalado próximo as extremidades da
estrutura para que ao se aproximar do limite de movimentação, a mesa efetue o
acionamento da alavanca que acionara o chaveamento interno dos contatos elétricos
que conectaram a(s) entrada(s) do microcontrolador ao GND, permitindo ao circuito
lógico interpretar a informação enviada por uma das configurações apresentadas na
figura abaixo:

71
FIGURA 22 – Circuito de ligação para chaves de fim de curso.
O projeto apresenta duas possibilidades de utilização do sistema de
travamento4, que podem ser selecionados por meio de uma pequena modificação
nas conexões físicas do circuito elétrico e de uma alteração na lógica de
programação, dependendo das necessidades dos clientes durante a utilização do
produto. Ela pode ser do tipo identificado, onde cada sensor está ligado
individualmente a um pino de entrada do microcontrolador ou do tipo não
identificado em que os dois sensores estão conectados paralelamente a um único
pino para leitura.
Os dois circuitos de acionamento proporcionam o objetivo de enviar um sinal
ao controlador quando um dos limites de movimentação é rompido, porém na
configuração identificada tem-se a vantagem de conhecer em qual sentido ocorreu à
falha de movimentação, o que permite elaborar rotinas de programação que utilizem
essa informação para estabelecer parâmetros de emergência, como por exemplo,
permitir o retrocesso automático ou manual do sistema no sentido contrário. 4 Por convenção, a unidade de movimentação utiliza a opção acionamento não identificado com configuração padrão.

72
Ou pode-se optar por realizar uma leitura não identificada dos sensores de fim
de curso, nesse caso o cliente considera desnecessária para execução de suas
atividades o conhecimento que qual dos sensores foi acionado, conseqüentemente
este esquema tem a vantagem de utilizar apenas um dos pinos do microcontrolador
para essa função.
3.1.4 FUNÇÃO INFORMAR POSIÇÃO
O sistema da unidade de movimentação linear independe da forma de
transmissão utilizada seja ela por pinhão e cremalheira ou outro dispositivo
mecânico, só poderá atuar caso o software em execução possua uma referência de
posicionamento. Esse posicionamento é determinado em parte pelos sensores de fim
de curso e de home, contudo esses sinais são pontuais, ou seja, apenas ocorrem
efetivamente quando a mesa de movimentação atinge essas posições.
Fica evidente a necessidade de obter o valor do deslocamento efetuado no
restante do curso oferecido pela unidade de movimentação. Uma das formas de
permitir o acesso a essa informação é programar o software para realizar a
contagem do numero de vezes que ocorre o comando para acionamento do motor,
no caso o numero de steps (passos) dados pelo motor em um determinado
deslocamento.
Conhecendo-se a resolução do motor (o numero de passo por revolução ou os
graus entre cada passo) é possível determinar a quantidade de rotações que foram
efetuadas para certa sequencia de comandos realizadas pelo microcontrolador.
Aplicando o valor de redução entre o motor e o sistema de transmissão final, é
possível, por exemplo, determinar o deslocamento angular sofrido pelo pinhão, que
multiplicado pelo seu raio resulta no deslocamento linear sobre a cremalheira.
Uma das vantagens de utilizar a contagem dos steps do motor esta na
obtenção de uma unidade de medida para o deslocamento muito pequena, em um
motor de 200 passos por revolução, significa que é possível realizar um
deslocamento de 1/200 em uma volta completa, o que levaria a precisão da mesa de
movimentação abaixo dos décimos de milímetro caso ela possuísse ainda uma etapa
de redução entre o motor e o mecanismo de transmissão. Outra vantagem é a

73
necessidade de apenas realizar a programação de contagem já que não seriam
necessários componentes externos para realizarem esta tarefa.
Contudo o controle de movimentação utilizando apenas a contagem dos
comandos para realização dos passos do motor pode apresentar inconvenientes
graves em determinadas situações. Em uma aplicação que necessite de velocidades
elevadas de rotação, os motores de passo podem atingir uma frequência de giro
próxima da sua frequência natural e entrarem em um regime de ressonância onde o
rotor passa a vibrar ao invés de se deslocar com os pulsos enviados para as bobinas.
Caso o torque resultante sobre o eixo do motor seja maior que o torque (em
sentido contrario) exercido pela força de atração magnética entre as bobinas e os
dentes do rotor, assim como no caso da ressonância, o motor não conseguirá
executar os comandos do sistema e “perderá” passos, isso ocorre tipicamente
quando os valores de carga sobre o motor são muito grandes para sua capacidade
ou em situações em que ocorre travamento das partes móveis. Todos esses fatores
quando ocorrem induzem o sistema ao erro, pois seriam contados passos que o
motor na verdade não pode realizar durante o deslocamento e o processo
acumulativo desse erro teria como resultado uma excussão imprecisa da
movimentação ou a parada das funções pelo acionamento de um dos sensores de
limitação (fim de curso).
Para possibilitar a existência de uma alternativa para o controle da
movimentação realizada pela unidade foi incorporado ao projeto um dispositivo
capaz de substituir o processo de contagem dos comandos de passo por um tipo de
sensoriamento semelhante ao realizado pelos fins de cursos mecânicos, mas com
uma atuação instantânea ao longo de todo o curso descrito pela mesa. Essa forma
de monitoramento é realiza por um sistema denominado encoder.
Basicamente o encoder realiza um processo de transdução (transformação de
uma energia em outra de natureza diferente) do movimento linear ou rotacional em
um sinal elétrico capaz de ser utilizado pelo sistema eletrônico. Numa aplicação
digital, também pode converter essa informação de natureza física em uma
linguagem capaz se ser interpretada por sistemas lógicos para representar uma
grandeza associada ao deslocamento, velocidade ou aceleração dentro de um
programa.

74
O modelo clássico de encoder utiliza um disco conectado ao eixo cujo
movimento deseja-se monitorar, este disco possui diversas perfurações espaçadas
igualmente entre si. Alinhado paralelamente a uma face do disco é posicionado um
dispositivo fotoemissor e na face oposta um dispositivo fotoreceptor, o disco por ser
um corpo opaco impede que a luminosidade do emissor atinja o foto receptor exceto
quando uma das perfurações permite a comunicação entre o par sensorial. O
resultado é sinal semelhante a uma sequencia de pulsos alternados, que dependendo
da configuração do circuito corresponde à passagem ou a interrupção da luz entre os
elementos.
Para aplicação no projeto foi escolhido um layout de encoder com a
capacidade de fornecer sinais tanto a nível digital quanto analógico. Esse sinal pode
ser uma sequencia de pulsos cujos valores máximos e mínimos correspondem
respectivamente a um valor de nível lógico alto (5V) ou nível lógico baixo (0V). A
mesma sequencia de pulso pode ser utilizada pelo CI LM331 para converter sua
frequência em um sinal de tensão, como o valor de saída é proporcional a
quantidade de pulsos em um determinado tempo é possível estipular a velocidade do
de rotação do eixo. O desenho a seguir apresenta essa concepção multiuso do
encoder:

75
FIGURA 23 – Esquemático do circuito encoder

76
O esquemático apresenta algumas características particulares e pode ser
dividido em duas seções. A primeira é formada pelo CI 74LS04, um comparador com
histerese (Schmitt Trigger) que coleta o sinal chaveado pelo par fotoemissor/receptor
e filtra os ruídos presentes no sinal transformando-o em uma onda quadrada cujo
valor da saída será 5V ou 0V. Pelo fato de ser um circuito do tipo TTL o nível de
saída é compatível com a linguagem digital do microcontrolador que entende o sinal
como uma sequencia binária de zero e um.
O restante do circuito é composto pelo CI LM 331, um conversor de sinais do
tipo V-F (tensão para frequência) ou F-V (frequência para tensão) que permitirá
utilizar o sinal de saída do circuito anterior para obter uma saída com tensão variável
em função da frequência de pulso captada pelo sensor.
O circuito ainda apresenta a possibilidade de ser alimentado com uma tensão
de 7 a 12 volts, embora também atue com 5V dependendo das configurações
utilizas. Permite ainda escolher a forma de alimentação do CI TTL com tensão
externa ou com tensão interna fornecida pelo regulador de tensão 7805 integrado à
placa. O usuário ainda pode realizar regulagem no nível de saída do LM 331 por meio
de um potenciômetro de precisão e também verificar o acionamento do fotoreceptor
ativando um led conectado ao sinal da saída digital, que embora o efeito seja
perceptivo apenas em baixas frequências permite a verificar problemas no circuito de
sensoriamento. Uma descrição mais detalhada dos componentes pode ser conferida
a seguir:
a) J1: permite a alimentação da parte do circuito que contem o conversor F-T
por meio dos terminais um e dois. O terminal três do borne realiza a saída
do sinal digital em nível lógico alto e baixo;
b) J2: borne de três vias que utiliza os terminais um e dois para fornece cinco
volts ao circuito TTL 7414 e permite a coleta do sinal de tensão resultante
da conversão por meio do terminal três;
c) J3: conector de três pinos que interliga o par fotoemissor/receptor a placa;
d) J4: conector também do tipo pino que recebe um jumper para selecionar o
tipo de alimentação (interna ou externa) utilizada pelo Schmitt Trigger;

77
e) J5: Receberá um jumper entre seus terminais caso utilize alimentação
interna ou pode ter o jumper desconectado para isolar o regulador de
tensão no caso de existir uma fonte externa para os cinco volts;
f) J6: Jumper que conecta o um led a saída do Schmitt Trigger e permite que
ele acenda quando o sinal possui nível lógico alto.
g) D1: Diodo retificador que protege o regulador de tensão contra tensões
elétricas com sentido contrário a sua saída;
h) D2 e D3: LEDs que informam se a placa possui alimentação e se o foto
sensor está ativo, respectivamente;
i) C1: Capacitor que interliga o circuito de sinal digital ao conversor
frequência para tensão;
j) C2: Juntamente com um resistor forma um circuito ressonador que serve
como referência de intervalos de tempo para o pino RC do LM 331;
k) C3: atua na estabilização do sinal de saída da tensão já convertida;
l) R1, R2, R3, R4, R5 e R6: são resistores dimensionados pelo fabricante do
conversor para definirem os valores de tensão utilizada como referência e
os níveis do sinal de saída;
m) R7 e R8: atuam respectivamente como um divisor de tensão no circuito do
fotoreceptor e restringe a corrente e a tensão no fotoemissor;
n) R9 e R10: são resistores que limitam a tensão e a correte para os led
sinalizadores de alimentação e acionamento do encoder;
o) RV1: potenciômetro de precisão que realiza o ajuste fino da tensão de saída
do LM 331;
p) U1: conversor F-T ou T-F LM 331;
q) U2: circuito integrado 74LS14 do tipo TTL;
r) U3: regulador de tensão 7805 interno, pode ser suprimindo dependendo da
aplicação.
A organização desses componentes na placa de circuito impresso foi
desenvolvida para que as dimensões laterais fossem compatíveis com a largura
padronizada das placas da fonte de alimentação e do microcontrolador, o resultado
desse trabalho pode ser observado na figura 24:

78
FIGURA 24 – Layout da placa para o encoder
A placa do encoder, assim como as placas anteriores, apresenta em cada
extremidade um pad com diâmetro externo de aproximadamente 3,8 mm, seu
propósito é sinalizar a posição do furo que ira fixar o espaçador de polímero que
mantém as placas conectadas ao gabinete. Também é possível notar a direita dos
bornes J1 e J2 um espaçamento considerável até a borda lateral, que embora
represente um consumo maior do material de base possui um papel importante ao
garantir o espaço e proteção para a conexão dos condutores, além de permitirem a
fixação de adesivos para sinalizar a função de cada um dos terminais.
O dimensionamento e os layouts de posicionamento dos componentes nas
placas, sobre tudo a localização dos furos e dos bornes, seguem um padrão que
tende a melhorar o aproveitamento interno do espaço onde as placas serão
acondicionadas. No caso da placa do encoder seu valor de largura é coincidente com
os encontrados nas placas da fonte e do microcontrolador que são de
aproximadamente 38 mm e o valor do comprimento da placa beira os 61 mm. Os
valores milimétricos não são exatos, pois as dimensões dos componentes eletrônicos
encontrados no mercado são baseadas nos sistema britânico de unidade, que utiliza
um submúltiplo da polegada o Mil (th) que corresponde a 0.0254 milímetros.
A figura 25 apresenta uma prévia visualização de layout para a placa antes da
sua confecção, vale ressaltar que alguns componentes podem apresentar uma
representação real diferente do aspecto modelado pelo software quanto à altura ou

79
cor do encapsulamento (exceto quando padronizados), porém todos devem possuir
compatibilidade nas medidas consideradas determinantes como o espaçamento entre
os terminais e o espaço lateral ocupado na face da placa.
FIGURA 25 – Layout em 3D da placa para o encoder
3.1.5 FUNÇÃO FORNECER CORRENTE
O microcontrolador utiliza o sinal enviado pelos sensores para determinar,
juntamente com os parâmetros definidos pelo programa em excussão as ações de
comando que serão efetuadas pelos atuadores presentes no sistema. Estes
atuadores podem ser desde pequenos LEDs até transdutores mecânicos como
motores e cilindros pneumáticos. Contudo o Atmega 328P, assim como outros
sistemas de controle de baixa potência apresenta uma limitação técnica relacionada
com as características de consumo elétrico dos equipamentos que controla.
Para emitir um sinal de comando o microcontrolador utiliza um pino
configurado como output (saída) que consegue fornecer um sinal com até cinco volts
de tensão e corrente máxima de 40 mA. Isso permite a ligação direta de um led ao
seu terminal, visto que o consumo típico de um diodo emissor de luz está próximo
dos 10 mA e sua tensão de trabalho por volta de 1.2V (considerando é claro a
existência de um resistor em série para garantir estes valores).

80
Contudo elementos que necessitem de níveis de tensão, e sobre tudo de
corrente superiores aos fornecidos pelo microcontrolador provavelmente não
entraram em funcionamento e poderão inclusive danificar de forma permanente o
circuito interno conectado ao pino output. Outra conseqüência da ligação direta de
circuitos de potência ao microcontrolador é o risco de ocorrem surtos de tensão que
poderão ocasionar erros de processamento ou o colapso total do circuito (“queima”)
do controlador.
Existem dispositivos que são empregados na interface entre o circuito de
controle e os elementos que exigem níveis consumo elevados. Em geral esses
sistemas utilizam o sinal de baixa potência enviado pelo microcontrolador para
chavearem circuitos com elementos que amplificam o sinal para níveis elevados de
tensão e corrente capazes de alimentarem grandes cargas. Quando estes dispositivos
possuem alem do circuito de potência, outros circuitos que visam melhorar o
desempenho oferecido, como por exemplo, isoladores de sinal, filtros, dispositivos de
segurança entre outros, eles recebem a denominação de driver.
O projeto apresenta como necessidade a existência de um driver que permita
ao microcontrolador comandar o motor de passo que realiza o papel de converter
energia elétrica em mecânica para realizar a movimentação linear do conjunto. As
características associadas ao driver devem incluir a compatibilidade com os sinais de
saída do microcontrolador, um funcionamento que não produza interferências
eletromagnéticas sobre os demais componentes do produto, o isolamento entre os
sinais de acionamento e o circuito de potência, baixo custo de produção ou aquisição
e a facilidade de utilização.
A principal alternativa oferecida pela instituição é um drive para acionamento
de motores de passo do tipo bipolar desenvolvido pelos professores Nelson
Bonacorso e Valdir Noll para aplicações didáticas. Entre as vantagens da utilização
deste drive estão à facilidade de obtenção do dispositivo junto à instituição, a
compatibilidade com os sinais lógicos enviados pelo microcontrolador com o uso de
apenas dois terminais para controle do drive, a presença de uma fonte de
alimentação interna.

81
A arquitetura do drive DCBMP é baseada na utilização L6802N, um circuito
integrado que possui os componentes e as características necessárias para acionar
um motor de passo do tipo bipolar com duas unidades de fase (bobinas). Sua
construção inclui duas pontes H controladas por um circuito lógico que gera a
sequencia de passos com base em um sinal de clock externo enviado pelo
microcontrolador. Na figura abaixo é representado um esquemático do
funcionamento do drive:
Fonte: BONACORSO, Nelson; NOLL, Valdir.
FIGURA 26 – Diagrama de funcionamento do drive
Alem do sinal que determinam os passos do motor, o drive possui uma
entrada para um sinal que configura o sentido de rotação dependendo do valor
lógico aplicado no pino 2 (CW/CCW) do L6208N, no caso HIGH (5V) define o sentido
como horário e no caso do nível lógico LOW (0V) seleciona o modo de rotação para
anti-horário. A figura a seguir apresenta a placa que constitui o drive:

82
Fonte: BONACORSO, Nelson; NOLL, Valdir.
FIGURA 27 – Vista superior do drive DCBMP
3.1.6 FUNÇÃO MOVIMENTAR
A função movimentar representa o dispositivo que ira realizar a transformação
da energia elétrica provida pelo drive de corrente em uma energia de natureza
diferente, a mecânica.
O transdutor escolhido para aplicação no projeto foi o motor de passo,
principalmente pelas vantagens oferecidas sobre seus concorrentes, no caso os
motores DC que apesar do baixo custo e simplicidade de acionamento apresentam a
desvantagem de ter um controle pouco preciso do movimento de rotação e os servos
motores com eficiência e precisão elevadas, mas com sistemas de controle
complexos e de alto custo.
O motor de passo (figura 28) recebe este nome devido ao fato de possuir um
deslocamento angular controlado pela excitação de suas bobinas que dependendo
dos pulsos enviados pelo sistema de controle, pode realizar pequenas variações na
posição do rotor, fazendo com que ocorra a rotação do eixo em etapas chamadas de
passo. No caso de um acionamento digital é possível controlar a frequência e a

83
quantidade de steps (passos) realizados pelo motor, o que permite definir com
precisão a velocidade e do deslocamento sofridos pelo eixo.
FIGURA 28 – Motor de passo

3.2 ESTRUTURA MECÂNICA
A concepção mecânica reúne importantes componentes funcionais do produto
que garantem a fixação dos elementos estruturais, que suportam os carregamentos
aplicados sobre o sistema. Também permite a fixação dos demais elementos que
compõem a parte eletroeletrônica incluindo os sensores, condutores elétricos,
sistema de controle lógico, subsistema de alimentação e os transdutores, como o
motor e o encoder.
O projeto mecânico possui como característica principal, a capacidade de
resistir aos esforços solicitados durante o funcionamento e garantir que o restante
dos elementos do sistema consiga executar suas atividades.
O desenvolvimento de projeto possui restrições determinantes, abordadas
durante a fase do projeto informacional, que limitam algumas características técnicas
como o peso e o custo do produto quando relacionados à robustez exigida, da
unidade de movimentação linear. Baseado nesses termos é realizado uma analise
das possíveis soluções que podem ser aplicadas no projeto sem comprometer as
especificações determinantes.
O processo de detalhamento exposto a seguir apresenta as soluções
encontradas e desenvolvidas para a estruturação e construção do modulo mecânico
que constitui a unidade de movimentação.
3.2.1 FUNÇÃO SUSTENTAR
A sustentação garante a estabilidade do sistema mecânico, pois assegura que
os componentes estarão devidamente fixados em suas posições determinadas. Isso
pode ser obtido a partir do projeto de uma estrutura que permita alem do baixo
peso, baixo custo e agregando valores elevados de resistência mecânica quando
solicitados.
Esta função apresenta duas subfunções, uma delas determinada estruturar e a
outra de interligar estrutura. A subfunção estruturar consiste nos elementos físicos,
que propiciam a rigidez e a resistência mecânica do produto. O dispositivo

85
selecionado para executar esta função e conhecido como perfil extrudado
semelhante ao apresentado na figura abaixo.
FIGURA 29 – Perfil de alumínio extrudado
O perfil extrudado consiste em um elemento solido composto de uma liga de
alumínio, com características fazem com que este componente tenha uma grande
importância dentro da função a qual é submetido. Entre suas principais
características as de maior destaque estão relacionadas, por exemplo, no que diz
respeito ao seu baixo peso, a boa resistência corrosão e a geometria que permite
com que esse elemento tenha uma boa resistência mecânica.
Para interligar os perfis de alumino e permitir que o conjunto forme uma base
de sustentação responsável por assegura a rigidez mecânica do sistema foi criada
para a aplicação no projeto o layout de duas placas também de alumino, localizadas
na frente e na traseira da unidade, cuja função é fixar os perfis de extrudados por
meio de parafusos que transpassam a placa e são acoplados a rosca interna usinada
no orifício central da seção transversal do perfil, como pode ser observado na
montagem os perfis e das placas mostradas na figura abaixo:

86
FIGURA 30 - Estrutura de sustentação
Os perfis possuem dimensões de 45 mm para largura e altura enquanto seu
comprimento é de 400 mm, a disposição dos perfis na montagem permite a escolha
permite a escolha entre o modelo simples o duplo com uma seção de 45 x 90 mm,
porém tendo em vista que o primeiro modelo apresenta maior disponibilidade na
instituição optou-se por sua aplicação na estrutura mecânica. As medidas
complementares das placas são de 120 mm de altura, 250 mm de largura e uma
espessura de 12 mm.
3.2.2 PROTEGER
A garantia de que os elementos envolvidos na estrutura do produto não
sofram qualquer tipo de dano fica por responsabilidade da função proteger. Dentro
deste contexto são relacionadas duas importantes subfunções destinadas a
atenderem regiões especificas do projeto, são elas: proteger componentes e
proteger cabos elétricos. Para a proteção dos componentes, será utilizado um
cabinete metálico, já a segurança dos cabos elétricos fica por conta de um elemento
conhecido como esteira porta cabos.

87
O cabinete metálico é constituído de uma estrutura rígida, derivada da
utilização de chapas de aço. Tal aço consiste em um elemento de baixo carbono, que
oferece dentro desta aplicação uma boa resistência mecânica e facilidade de
fabricação.
A esteira porta cabos é um elemento que reuni baixo peso associado a um
alto grau de estabilidade. Este elemento possui características importantes como, por
exemplo, abertura rápida, é silenciosa graças ao sistema de amortecimento interno
e, portanto é aplicável em diversas situações. São utilizadas desde 1950 e
inicialmente era produzida a base de aço, mas com o passar dos tempos começaram
a ser produzidas também com um polímero conhecido por polipropileno, sendo estas
atualmente as mais utilizadas. Geralmente são utilizados em maquinas ferramenta,
robôs industriais, guindastes entre outros.
3.2.3 GUIAR MOVIMENTO
Esta função tem como principal objetivo garantir que a movimentação da
mesa seja executada em uma trajetória linear, e também garantir que este
movimento ocorra de forma suave sobre a superfície de contato entre os elementos
móveis.
O deslocamento realizado durante a movimentação esta associado a diversas
forças que atuam sobre os elementos que guiam o movimento, entre elas a força
resultante do carregamento sobre a mesa e também pelos momentos em torno dos
elementos de apoio. A ação dessas forças não deve influenciar no posicionamento
dos elementos moveis exceto é claro no deslocamento axial em relação à trajetória
retilínea, uma vez que o deslocamento sofrido em outras direções resulta em uma
falta de precisão do produto e em uma ausência de controle sobre a movimentação
linear.
A figura a seguir apresenta os elementos responsáveis por guiar o movimento
executado pela unidade de movimentação linear que correspondem ao par
constituído pelas guias lineares e seus patins.
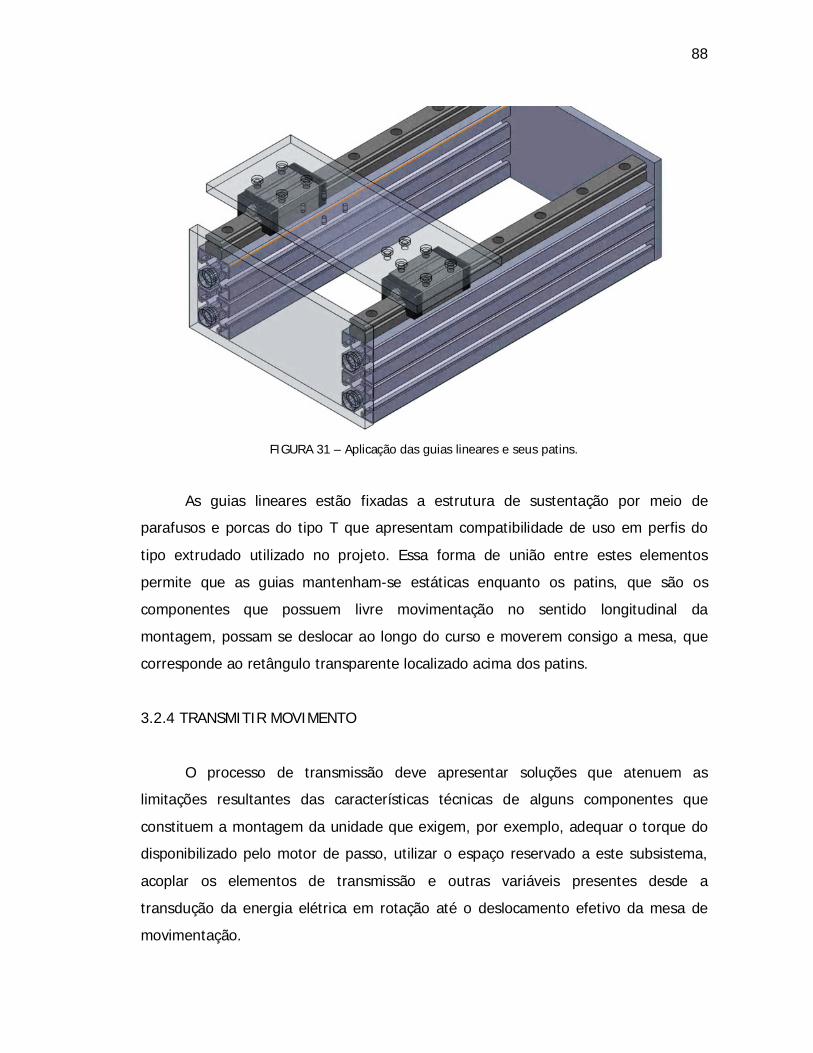
88
FIGURA 31 – Aplicação das guias lineares e seus patins.
As guias lineares estão fixadas a estrutura de sustentação por meio de
parafusos e porcas do tipo T que apresentam compatibilidade de uso em perfis do
tipo extrudado utilizado no projeto. Essa forma de união entre estes elementos
permite que as guias mantenham-se estáticas enquanto os patins, que são os
componentes que possuem livre movimentação no sentido longitudinal da
montagem, possam se deslocar ao longo do curso e moverem consigo a mesa, que
corresponde ao retângulo transparente localizado acima dos patins.
3.2.4 TRANSMITIR MOVIMENTO
O processo de transmissão deve apresentar soluções que atenuem as
limitações resultantes das características técnicas de alguns componentes que
constituem a montagem da unidade que exigem, por exemplo, adequar o torque do
disponibilizado pelo motor de passo, utilizar o espaço reservado a este subsistema,
acoplar os elementos de transmissão e outras variáveis presentes desde a
transdução da energia elétrica em rotação até o deslocamento efetivo da mesa de
movimentação.

89
A solução adotada para o sistema que interliga o elemento de propulsão
(motor) aos elementos principais de movimentação que é o par pinhão e cremalheira
foi à utilização de polias e correia sincronizadora. A principal vantagem do sistema é
o baixo custo, quando comparado com o uso de redutores planetários, que facilita a
possibilidade de aquisição do produto por parte da instituição.
As polias são elementos que possuem forma correspondente a uma roda.
Estes elementos se caracterizam por apresentarem um movimento giratório que se
dá em torno de um eixo e também por serem dotadas de um arco, cuja função é
abrigar um elemento flexível como, por exemplo: correias, cabos, correntes entre
outros, visando transmitir movimento.
Já as correias , assim como as polias, são elementos de transmissão, porém
caracterizam-se por ser constituído por uma tira flexível sem fim, com a função de
transmitir junto às polias, um movimento de rotação de uma árvore para outra. A
velocidade ou torque fornecido por um conjunto transmissor depende da relação
entre os diâmetros das polias que compõem o sistema, desde o eixo de entrada até
o eixo de saída.
No projeto há a necessidade de um processo chamado redução, que se
caracteriza por reduzir a velocidade vinda do motor, com o objetivo de aumentar o
torque de acionamento. Para isso as polias envolvidas no processo devem ter
diâmetros diferentes, sendo a polia movida, aquela que recebe o movimento, maior
que a polia motora, isto é, a que fornece movimento.
Serão utilizadas polias de 36 e 12 dentes, sendo a com maior numero de
dentes a movida, e a com menor a motora. O modelamento matemático do processo
descrito anteriormente é expresso pela seguinte equação:
1 1
2 2
n Dn D
(3)
Onde
푛₁ e 푛₂ são as velocidades (rpm) das polias motoras e movida
퐷₁ e 퐷₂ são os diâmetros das mesmas.

90
A figura a seguir apresenta a montagem das partes se sofrem deslocamento
em relação à estrutura quando ocorre a movimentação linear do produto. Nela é
possível observar o sistema de redução que utiliza polias do tipo sincronizadas
(elementos destacados em amarelo). Acoplados sob a mesa estão os patins e um
flange constituídos de duas peças, que serve de apoio para o motor de passo que
possui a polia motora acoplada em seu eixo.
Ao ser acionado, o motor realiza um momento sobre a polia forçando a sua
rotação, esse movimento é transmitido através da correia (não presente na
montagem) para a polia motora que se encontra conectada a um eixo bi apoiado
sobre dois rolamentos de uma carreira de esferas, sendo que somente o superior
esta visível na figura.
FIGURA 32 – Sistema de redução por polias
O momento que atua sobre a polia movida é transmitido para o eixo graças à
montagem realizada com interferência, que força os dois elementos a manterem-se
conectados durante o processo de rotação. Ao mesmo eixo encontra-se acoplado,
em sua extremidade inferior, o pinhão que juntamente com a cremalheira realiza a
conversão do movimento rotacional resultante do torque transmitido pelo eixo
movido em movimento linear. Como a cremalheira está fixa à estrutura do produto, a
reação natural de sistema é forçar o deslocamento da estrutura onde o pinhão

91
realiza seu acoplamento, o que culmina na movimentação linear da mesa. Com a
chapa frontal suprimida é possível visualizar na perspectiva da figura a seguir o
engrenamento entre o pinhão e a cremalheira.
FIGURA 33 – Transmissão por meio de pinhão e cremalheira
3.2.5 SINALIZAR
Assim como qualquer tipo de equipamento mecatrônico encontrado no
mercado ou em instituições de ensino, a mesa de movimentação linear apresenta
aspectos técnicos que podem em algum momento oferecer um risco ao usuário do
equipamento. Os níveis de periculosidade podem ser agravados pelo fato do
processo conter um grau de automatização sobre a movimentação, o que leva o
produto a realizar movimento de modo automático podendo surpreender o usuário
durante o funcionamento do produto.
Para que o usuário tenha consciência do estado de operação da unidade está
proposta na concepção uma forma de sinalização luminosa que utiliza LEDs para
alertar que o equipamento encontra-se em funcionamento e pode, dependendo do

92
comando executado, realizar algum tipo de deslocamento. Inicialmente o produto
deve sinalizar os seguintes estados de operação:
a) Ligado – faz referência ao fato de que o aparelho encontra-se conectado a
rede de energia alimentação local, portanto os circuitos elétricos estão
energizados e o sistema de controle pode realizar o acionamento do produto.
b) Em espera – sinaliza que a operação a ser executada encontra-se
momentaneamente bloqueada, fincando a cargo do operador optar por iniciar
ou não o processo em andamento.
c) Emergência – informa ao operador que o botão de emergência encontra-se
pressionado e que o equipamento não pode realizar nenhuma ação
automatizada durante este período.
Na figura abaixo relaciona o esquema de ligação para utilizado para o
conjunto óptico que realiza a interface entre os estados de operação e o usuário,
composta pelos diodos emissores de luz, pelos resistores de limitação para a
corrente e tensão de trabalhos dos LEDs e os pontos de onde são enviados os
comandos de acendimento. Note que o LED de emergência é acionado pelo botão de
emergência e não pelo microcontrolador, que nesse caso utiliza o mesmo sinal para
reconhecer o estado de emergência como ativo.
FIGURA 34 – Sinalização dos estados de operação
Além de sinalizar o estado de operação, o produto deve alertar o usuário
sobre riscos associados aos componentes elétricos e mecânicos do sistema para

93
prevenir acidentes decorrentes da falta de informação ou treinamento do operador
em determinadas situações.
Entre os riscos presente na unidade de movimentação estão os relacionados
com a manipulação de energia elétrica devido ao contato direto com partes
energizadas, sobre tudo nos estágios primários dos transformadores utilizados que
apresentam uma tensão de 220 VCA. Mecanicamente os riscos estão associados ao
processo de movimentação que pode promover o esmagamento de corpos presentes
nas áreas de risco onde ocorre o deslocamento da mesa ou nas proximidades do
sistema de redução por polias e no mecanismo de transmissão por pinhão e
cremalheira.
Para prevenir estes riscos estão selecionadas as etiqueta apresentadas na
figura a seguir, que serão fixadas nas laterais do produto e nas proximidades das
áreas onde a probabilidade de ocorrer algum tipo de incidente seja evidente.
FIGURA 35 – Etiquetas de riscos ao operador
As etiquetas apresentam caráter preventivo e atuam apenas como aviso
indicativo dos riscos, portanto elas não impedem que a exposição do usuário como p
ocorre nos sistemas que possuem proteções física que impedem o contato com as
áreas moveis ou sistemas de travamento por detecção de movimentos em áreas de
perigo.

REFERÊNCIAS
AMARAL, Daniel Capaldo; Et al. Gestão de desenvolvimento de produto. São Paulo, SP: Saraiva, 2006. BACK, Nelson; Et al. Projeto integrado de produtos. Planejamento, Concepção e Modelagem. Barueri, SP: Manole, 2008. CETINKUNT, Sabri; Mecatrônica. Tradução: José Luiz Machado do Amaral; José Franco Machado do Amaral. Rio de Janeiro, RJ: LTC, 2008. JOHNSON, David E. Fundamentos de Análise de Circuitos Elétricos. Tradução: Onofre de Andrade Martins; Marco Antônio Moreira de Santis. Rio de Janeiro, RJ: Prentice-hall, 1994. INMETRO. Regulamentos Técnicos Metrológicos e de Avaliação da Conformidade. Disponível em: <http://www.inmetro.gov.br/legislacao/>. Acesso em: 18/02/2011. Ministério do Trabalho e Emprego. Normas Regulamentadoras. Fevereiro de 2011. Disponível em: <http://www.mte.gov.br/legislação>. Acesso em: 18/02/2011 Mectrol. Automação Industrial. Disponível em: <http://www.mectrol.com.br>. Acesso em: 17/02/2011. RAC. Movimentação Linear. Disponível em: <http://www.racml.com.br>. Acesso em: 17/02/2011. Mec Part’s. Linear Technology. Disponível em: <http://www.mecparts.com.br>. Acesso em: 17/02/2011. NSK. Suprimentos Industriais. Disponível em: <http://www.nsk.com.br>. Acesso em: 17/02/2011. Hidrapa. Automação Industrial. Disponível em: <http://www.hidrapa.com.br>. Acesso em: 17/02/2011.

APÊNDICE

96
APÊNDICE A – CASA DA QUALIDADE

APÊNDICE B - DESENHOS TÉCNICOS


ANEXOS

ANEXO A – CATALOGO TÉCNICO BORNES BR0





























