-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
1/8
1
Abs t rac t — Waste collection have been a local
environmentalproblem that have serious repercussions on the
populationhealth, in order to give a solution for this problem this
paperpropose a pneumatic device with the aim of improving
thisprocess, automatizing the waste collection will reduce costsand
times of operation. This work has developed a properdimensioning
process for the device, which will be able to lift a1Kg waste
disposal. For dimensioning basics calculation on thesubject
pneumatics were used and at same time a functionaldesign for the
mechanism is shown. Through the methodologyproposed for the
dimensioning and design we were able toproperly select each
component necessary to manufacture andassembling the device, this
methodology is shown in detail in
this paper; in addition this prototype device is going to be
ascaled to real functioning dimensions, all the necessarychanges
and assumptions for making this are presented in thiswork.
keywords — Pneumatic, waste collection, design,dimensioning,
methodology of manufacturing.
Resumen — Resumen--- La recolección de basura ha sido unproblema
ambiental local que ha tenido graves repercusionesen la salud de la
población. Para dar una solución a esteproblema este articulo
propone un dispositivo neumático con elobjetivo de mejorar y
automatizar el proceso, así se reduciríanlos costos y los tiempos
de operación. Este trabajo hadesarrollado un proceso de
dimensionamiento adecuado parael dispositivo que será capaz de
levantar un contenedor debasura de 1Kg. Para el dimensionamiento de
usaron cálculosneumáticos básicos además de realizar un
mecanismosfuncional para el mismo. A través de la metodología
propuestapara el dimensionamiento y diseño se pudo
seleccionaradecuadamente cada componente necesario para fabricar
y/oensamblar el dispositivo, esto es mostrado en detalle en
esteartículo; también se propone escalar el dispositivo
(prototipo)hasta unas dimensiones para el funcionamiento real,
todos loscambios y suposiciones necesarias son expuestas en
estetrabajo.
Palabras c lave — neumática, recolección de basura,
diseño,dimensionamiento, metodología de fabricación.
I. INTRODUCCIÓN La gestión de residuos, es la recolección,
transporte,
tratamiento y reciclaje de material de desecho, nuestraciudad ha
presentado un gran reto a la hora realizar las
respectivas estrategias para dicha gestión, los
métodosconvencionales de recolección por parte de hombres se venen
la necesidad de darle paso a técnicas algo más modernasque puedan
no solo mejorar el proceso desde el punto devista logístico, sino
también a abrir espacio a técnicas decontrol de procesos ; llegando
a proporcionar a las personasuna forma de simplificar tareas y de
tener un sistema quepermita llevar a cabo acciones comunes con
facilidad y sinesfuerzo. El trabajo recolección ha ido
simplificándose cadavez gracias a camiones automatizados en la
mayoría depaíses europeos e incluso algunos latinoamericanos; esto
hallevado a grandiosos resultados. A pesar de los que lossistemas
de recolección neumática es una tecnologíamadura, localmente es
nulo el avance tecnológico en estecampo. El diseño de un
dispositivo neumático queautomatice el proceso trae como
consecuencia: ahorros encostos de mano de obra, tiempos de trabajo
y al mejorartiempos se mejoran los costes de combustible, además
laautomatización de la recolección de basura sería un proyectocon
sello verde que impactaría, social y ambientalmente laciudad.
A partir de conocimientos básicos de la neumática y otroconjunto
de conocimientos de ingeniería se diseña yconstruye un modelo del
sistema semi-automatizado para larecolección, en este trabajo se
presenta de manera detallada
el proceso de diseño, dimensionamiento, selección de piezasy/o
equipos y construcción del modelo, todo esto bajo basesteóricas de
ingeniería que se reportan en la literatura. Estonos permite
seleccionar adecuadamente componentesbásicos como son el compresor,
las válvulas direccionales yde control del fluido de trabajo además
de los actuadoresfinales que serán los encargados de realizar las
accionesfinales en el mecanismos, es decir los que proporcionan
elmovimiento que se espera, a partir de una carga impuesta de1Kg se
dimensiona todo el sistema, eso quiere decir que elsistema tiene
límites lo que en la realidad se veríaproyectados como carga máxima
por contenedor además deuna forma estándar del mismo.
II. TRABAJOS PREVIOSSe han desarrollado varias investigaciones
para
automatizar la recolección de basuras, la aplicación
detecnología neumática es ya bastante común y manejada por
Proceso de diseño y fabricación de un dispositivoneumático para
la recolección semi-automática de
desechos.Design and manufacturing process of a pneumatic device
for
semi-automatic waste collection Carlos Camargo1, Carlos Garcia2,
Miguel Rincón3, Eduard Ávila4, Kevin Alvear 5, Robinsón Castaño
6
1Facultad de Ingeniería Mecánica, Universidad del Atlántico,
[email protected] de Ingeniería Mecánica,
Universidad del Atlántico, [email protected]
3Facultad de Ingeniería Mecánica, Universidad del Atlántico,
[email protected]ántico.edu.co
4Facultad de Ingeniería Mecánica, Universidad del Atlántico,
[email protected] de Ingeniería
Mecánica, Universidad del Atlántico,
[email protected]
6Facultad de Ingeniería Mecánica, Universidad del Atlántico,
[email protected]
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
2/8
2
empresas grandes en países como Alemania, Francia yEspaña en
Europa y en México o Uruguay en Latinoamérica,pero el acceso a sus
planos de fabricación y metodología deprocesamiento son poco
accesibles ya que esto hace partedel Know-How de las compañías, se
hizo una revisión de laliteratura para verificar modelos de
automatización pararecolección de basuras propuestos, se encontró
queSalvatierra [1] propuso un modelo electromecanico que
mejoraría el proceso de reloccecion interno y el manejo
delmismo, esto a nivel domestico. Como trabajos previos
adispositvos neumaticos de recolección existen desarrollosmuy
grandes hecho por compañías como Faun Kirchhoff enalemania y Heil
en USA, pero estas metodologías de diseñoestan protegidas, pero por
ser un tecnologia tan madura elconocimiento de estas aplicaciones
es bien conocido y apartir de el se realizará el proceso propuesto,
[2] Creuscompila en su libro una seria de formulas y bases
teoricasque sirven de guía en el dimensionamiento para el montaje
yconstruccion de los actuadores lineales ademas de laselección de
valvulas. Ademas [3] Barber en la seccion 6 y7 expone formar para
dimensionamiento y correctofuncionamiento para valvulas sellos y
actuadores. A partir deestas bases se hace un criterio teorico con
el cualdimensionamos y construimos el dispositivo y a partir
deestos metodos de calculo se presenta el desarrollo
deltrabajo.
III. PROCESO DE DIMENSIONAMIENTO GENERALYa que el objetivo de la
construcción del dispositivo es queluego pueda ser escalado se
seleccionan unas medidas apartir de un modelo existente de un
camión de la compañíaFaun Kirchhoff de Alemania.
Tabla 1. Dimensiones del camión, además de los limitessuperior e
inferior donde se alojara el mecanismo
(mecanismo de recolección lateral)
DIMENSIONES
zoom 100% Proyecto
COTA DIB(mm) REAL (mm) (mm)A 30 2064 516B 9 619,2 154,8C 76
5228,8 1307,2D 24 1651,2 412,8E 20 1376 344F 15 1032 258G 13 894,4
223,6H 50 3586 896,5I 20 1376 344J 10 688 172L 130 8944 2236R 58
3990,4 997,6
factor del dibujo 68,8
escala 4:1
Fig.1 Cotas del camión reflejado en la tabla 1.
En la anterior tabla se presentan las medidas reales tomadasa
partir de la imagen anterior con un factor de escala, comoel
fabricante no especifica las medidas reales, se procedió amedir
directamente sobre la imagen ya que se indica queesta guarda una
escala con el real, se calculó la escala a laque está el plano del
fabricante en comparación con unamedida entregada que es la de la
altura de sus camiones, asíse sacaron todas las medidas necesarias
con el error quegenera este tipo de medición. Estas medidas aunque
no sonde construcción sirven para ser límite del tamaño
delmecanismo a fabricar
IV. DIMENSIONES EN EL MECANISMO GENERAL DELEVANTE:
Las dimensiones de longitudes y carreras son las que hacenque se
complete el movimiento necesario para llevar elcontenedor a su
posición, estas medidas de longitudes debrazos y carreras fueron
tomadas en base a la altura delcamión y la forma en la que se
colocará, de forma que elcontenedor llegue correctamente a la
superficie del camión.Los datos de la carreas de los cilindros se
hicieron de forma
experimental a partir de una representación del modelo
semidieron estos datos.
Fig. 2 Dimensionamiento general del mecanismo delevante
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
3/8
3
Fig. 3 Se presenta una vista isométrica del
mecanismodiseñado.
La selección de piezas móviles es apoyada en un plano dedespiece
de un mecanismo existente de la empresa FaunKirchhoff de Alemania y
las dimensiones generales como fuedescrito anteriormente.
Se ilustra la enumeración de los cilindros, de esta manera seles
nombrará en el artículo.
V. METODOLOGÍA DE DIMENSIONAMIENTO YSELECCIÓN DE LOS
ACTUADORES.
A. Proceso de selección de actuadores.En el proceso de selección
se usaron métodos intuitivos parala escogencia del tipo de actuador
indicado donde a partir de
un mecanismo base, se estableció que para cumplir lamovilidad
necesaria y mantener la funcionabilidad se debenutilizar cilindros
lineales y puesto que los cilindros seránmanufacturados localmente,
se decidió construirlos con elprincipio de funcionamiento de doble
efecto ya que alnecesitar carreras bi-direccionales se simplifica
el proceso defabricación con respecto a los que tienen retorno por
resortesademás, con cilindro de doble efecto podemos
controlar,tanto como la carrera de salida como la de retroceso en
elcilindro. Los cilindros serán manufacturados a partir de jeringas
plásticas disponibles en el mercado, cuyosdiámetros son limitados
pero la relación costo/beneficio deusar estas frente al uso de
cilindros tradicionales (cuerpo enmateriales metálicos) es mucho
más alta, puesto que lascargas impuestas a los cilindros no exigen
gran resistenciamecánica en los materiales
B. Análisis de carga estática para eldimensionamiento de
actuadores.
Para el dimensionamiento de los elementos de acción
delmecanismo, en este caso cilindros lineales de doble efectose
realizó un estudio estático para determinar las fuerzas quedebe
soportar cada cilindro. Al tener diámetros establecidos en cada
jeringa a utilizar, se calcula la presión necesaria enel sistema
para lograr las fuerzas establecidas. Los cálculosestáticos se
hicieron para encontrar el valor de la presión detrabajo que sería
el necesario para levantar cargas de 1kg.
Fig.4 DCL para la sección de carga del mecanismo
0
( sin ∗ ) + ( cos ∗ LBx) − ( 1cosΩ ∗ ) − (1) 0
− 1 − + (2)
0 − − 1 + 0 (3)
Desarrollando las ecuaciones 1, 2 y 3 se obtienen losvalores de
fuerzas en los eslabones C y D siendo C eleslabón de interés, es
decir, el cilindro. Los cálculos sedesarrollaron para un W1 = 9,81.
Además se variaron losángulos que definen la posición del mecanismo
para poderdeterminar la posición crítica, donde la fuerza que
debesoportar el cilindro es la mayor. Los resultados se ilustran
enlas tablas siguientes:
TABLA IDatos para fuerza del cilindro para un W1= 9,81 N
Fc W1 MB Α ẞ Ω 29,15 9,81 0,91 75,00 70,00 90,0032,39 9,81 0,91
85,00 80,00 80,0033,89 9,81 0,91 88,00 83,00 75,0035,41 9,81 0,91
90,00 86,00 70,00
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
4/8
4
Fig. 5 DCL para la sección de levante del mecanismo.
Las ecuaciones planteadas son:
0 −( sin ∗ ) +( cos ∗ ) +( sin ∗) − ( cos ∗ ) + ( sin ∗) +( cos
∗ ) 0 (6)
0 − + − 0 (7)
0 − + + − 0 (8)
Resolviendo para 6, 7 y 8 teniendo en cuenta los
valoresanteriores, se obtiene: y haciendo FT = FC, se obtiene:
TABLA IIDatos para fuerza del cilindro para un W1= 9,81 N
FV FD FT α ẞ y94,923 38,5109 29,15 75 70 75150,06 41,7208 32,39
85 80 75
174,3 43,4001 34,1 89 84 75
Con Fc y Fv calculamos la presión del sistema a partir delos
diámetros de jeringas existentes. A partir de:
/ (9)TABLA III
Presión de trabajo a partir de los valores críticos.
Fc (N) 21,7 Fv 174,30
D (mm) 10,59 D(mm) 30A(m2) 8,8E-05 A(m2) 0,000707P(Pa) 246590
P(pa) 246590P(PSI) 35,7649 P(PSI) 35,7649
Donde Fc es la fuerza de los cilindros 4 y 5 que son los
delevante, a partir del diámetro conocido y se obtiene la
presiónmostrada, con esa presión se dimensionó el cilindro 3, quees
el del alce del mecanismo, teniendo la fuerza Fv quecorresponde a
este cilindro y el área transversal del embolode la jeringa (el
pistón).
Para simplificación de los cálculos estáticos no se incluyó
lainteracción del peso de los componentes del mecanismo conel
sistema lo que podría producir una leve desviación en el lapresión
de operación de los cilindros.
Para el actuador numero 2 la única restricción posible es
lafricción que sufre el pasador contra la madera, en la acciónde la
mordaza, como están partes son lubricadas la fricciónes mínima por
lo que se puede afirmar que un cilindro del tipo4 bastará para
realizar la acción de movimiento. En la acciónde agarre el cilindro
debe mantener la presión del sistema.
Para el actuador número 1 se comprobó que un cilindro deltipo 3
funcionará de la siguiente manera
Fig. 6 Representación de las fuerzas en el cilindro 1.
Entonces las fuerza del cilindro será la fuerza de
friccióndefinida por la normal y un coeficiente de fricción
madera-madera reportado en la literatura, la normal es el peso
delmecanismo más el peso de la carga en este caso, 0,595Kgy 1Kg
respectivamente.
∗ (10)Donde 0,7 y N= 15,65N
10,95 Teniendo en cuenta la ecuación 9:
El área de pistón a la presión de operación definida:
7 Lo cual es más pequeño que las jeringas comerciales del tipo2,
pero que actuaran bien el sistema.
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
5/8
5
Fig. 6ACilindro de 19mm diámetro manufacturadolocalmente.
La jeringa fue adaptada para que funcionase como cilindroen
donde se remplazó el vástago por uno de acero y seañadieron
agujeros para instalar los racores que sirven paracumplir la
función de doble efecto.
VI. METODOLOGÍA DE SELECCIÓN Y/OCONSTRUCCIÓN DE ELEMENTOS
FINALES CONTROL
DEL MECANISMOPara la selección de las válvulas direccionales del
sistemahubo dos criterios el caudal a manejar y la funcionabilidad
delsistema.
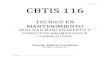
A. Caudal del sistema.El cálculo del consumo del sistema se basa
en las formulasy tablas expuestas por Creus [2]
( ) ( ) ∗ ( / (11)
Fig.7 Grafico para estimar los Kg/mm de consumo a partirde P y
d. extraído de Creus [2]
TABLA IVConsumo de cada cilindro en unidades de masa de
aire.
N°CARRERA(mm)
D.PISTON(mm)
(Kg/mm)CON-SUMO
CONSUMO(Kg)
1 70 303,50E-
06 2,45E-04
2 50 151,00E-
06 5,00E-05
3 70 303,50E-
06 2,45E-04
4 50 151,00E-
06 5,00E-05
5 50 151,00E-
06 5,00E-05
A partir de aplicar las formulas expuestas anteriormente
yobteniendo de la figura 7 los valores de kilogramos deconsumo por
carrera, con estos calculamos los valores deconsumo en Kg para cada
actuador. Ahora con este valor deconsumo y el tiempo que se estimó
para la carrera de cadaactuador se obtiene el consumo en L/s para
el sistema estoutilizando las siguientes formulas:
∗ ( ) ∗ 1,2 /3 (12)
( /) ∑ ( ° ∗ = ∗ ∗ (13)
[ + ∗ % + ∗% ∗ % ]∗ 2 (14)
Fig. 8 Tabla extraída del Creus [2] para el factor
desimultaneidad según el número de elementos de consumo.
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
6/8
6
TABLA IConsumo volumétrico de los actuadores
N° CANTQN(Nm3/s)
F.SIMULT. Q (m3/s)
1,3 3 1,2E-05 0,89 3,2E-052,4,5 2 8,2E-05 0,94 1,5E-04
QT (L/s) 0,19
Con la expresión 12 calculamos la cantidad de aire necesariaen
unidad de volumen a partir del consumo de masa, elCaudal de consumo
en Nm3/s es obtenido a partir de lasiguiente expresión / (15) con
un tiempo t1 =3,5seg para los tipo I y t2= 2seg para los tipo II.
Los tiemposse estiman de acuerdo a la criticidad del
movimiento.
A partir de la expresión 13 obtenemos la primeraaproximación al
consumo volumétrico del sistema, para serconservativos y porque el
uso de los actuadores es constantesuponemos Factor de uso= 1 y el
factor de simultaneidad esobtenido de la figura 8 y se obtuvo un
Caudal total de 0,23L/s, ahora estimamos el caudal corregido con la
expresión 14 Para un porcentaje de reserva del 20%, y un porcentaje
defuga conservativo debido a la manufactura de calidad mediadel
sistema del 30%.
Se obtiene un caudal corregido de 0,47 L/s.
Lo que según la empresa Toresa [4] de ingeniería oleohidráulica,
aplica para electroválvulas de ¼”, las cuales seadquirieron
localmente.
Fig.9 Electroválvulas 5/2 a la derecha y 3/2 a la izquierda.Las
electroválvulas son de conexión nominal a ¼” NPT paratrabajo y
descarga a 3/16 ” NPT, acción por solenoide yretorno por resortes,
la bobina de la válvula es a 110V AC ala izquierda se ilustra una
válvula que tiene 2 posiciones, 5vías ideal para manejar cilindros
de doble efecto y laizquierda una de 2 posiciones y 3 vías ideal
para cilindros desimple efecto. La escogencia de esta se explicará
másadelante.
Además se fabricaron válvulas con jeringas de la
capacidadsuficiente para soportar el caudal.
Fig.10 Válvulas de 2 posiciones y 6 vías fabricadas a partirde
Jeringas
Estas válvulas son de acción mecánica y tienen unaccionamiento
parecido a una válvula neumática de 5 vías ydos posiciones es ideal
para manejar cilindros de dobleefecto pero esta es controlada de
manera manual, donde lasposiciones son controladas por un vástago
que desplazaunos pistones/sellos que intencionalmente sellan o
abrenentradas y escapes como se muestra a continuación:
Fig. 11 Ilustración de la primera posición de la válvula 6/2
Fig. 12 Ilustración de la segunda posición de la válvula 6/2
Las representaciones se hicieron de manera ilustrativa,siguiendo
las normas de representación actuales.
Se hicieron perforaciones sobre el plástico a partir de
untaladrado manual con tornillos porque el material no eracapaz de
soportar el esfuerzo de un taladro convencional yen los agujeros
instalamos racores de ¼” tipo unión (dosentradas a manguera).Los
émbolos son lubricados para facilitar la acción manual,disminuyendo
la fricción contra el cuerpo de válvula. Comosujeción de los
racores al cuerpo de la válvula se usó acrílico
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
7/8
7
líquido que adquiere buenas propiedades luego deendurecer.
El cálculo de caudal de consumo corregido se aprovechapara
escoger el punto de operación del compresor.
VII. DESCRIPCIÓN DE FUNCIONAMIENTO DELMECANISMO E IMPLEMENTACIÓN
DEL SISTEMA
ELÉCTRICO PILOTO
El accionamiento del mecanismo se realiza como se ilustra
yexplica a continuación:
Fig. 13 Esquema electro-neumático del sistema derecolección de
basura-hecho en fluidsim.
Variando manualmente la posición de la válvula 1se acciona el
cilindro 1 que desplaza todo elmecanismo a una posición más cercana
al tanquede basura, este movimiento se realiza para reducirel
espacio ocupado por el camión al transitar por lascalles.
Mediante la válvula 2 se controla el cilindro 2, quecierra y
abre las mordazas para agarrar el tanque.
Luego mediante el primer selector se acciona elcircuito
eléctrico que controla el movimiento de loscilindros 3, 4 y 5.
El cilindro 3 sale, los cilindros 4 y 5 entran
libremente gracias a que la distancia entre lospuntos que une se
va disminuyendo, logrando asíun movimiento hacia adentro. Cuando
elmecanismo toma una posición horizontal, seaccionan los cilindros
4 y 5 mediante un final decarrera mecánico para permitir la salida
de dichoscilindros mientras el cilindro 3 sigue saliendo,
parallevar el tanque a la parte superior del camión ydisponer la
basura en camión.
Estando arriba el tanque, se abre el primer selectorpara
desenergizar la bobina de la válvula 5/2 yretorne a su posición
principal y el cilindro 1 vuelvaa entrar.
Se abre el segundo selector para desenergizar la
bobina de la válvula 3/2 y permitir el movimientolibre de los
cilindros 4 y 5. Cuando el mecanismo llega a su posición
inicial,
manualmente se acciona la válvula 2 para liberar eltanque y
mediante la válvula 1 accionada
manualmente se permite la entrada nuevamente delmecanismo al
camión.
NOTA:Los movimientos se realizan de dicha manera para tenermayor
control sobre el sistema, es decir en cada etapa de losmovimientos
si no se logró la función deseada debido a algúnerror de operación
se pueda corregir.
Ejemplo: El camión no se parqueó en el lugar adecuado
pararealizar la recolección de la basura, por ende no selogró una
apropiada sujeción del tanque; se puedecorregir regresando a la
posición anterior y regresara su operación nuevamente.
El tipo de basura que se recogió por el corto tiempoen la
posición superior abandonó por completo eltanque; se puede esperar
en dicha posición unossegundos más, mientras la basura cae
porcompleto, luego se acciona el retorno delmecanismo.
Debido a que no se tiene la cultura ciudadana en laciudad,
representaría un peligro accionar medianteun solo pulsador todos
los movimientos de una solavez, pues pueden transitar personas por
el lugar derecolección y pueden resultar heridos por elmovimiento
del mecanismo.
De esta manera, teniendo los movimientossecuenciales controlados
paso a paso por eloperario se tiene un control secuencial de
lasposiciones según la necesidad requerida.
VIII.CONCLUSIÓN
Las metodologías de diseño y construcción ayudanal correcto
dimensionamiento de un sistema y alaplicar teorías del campo
especifico en este caso deneumática el seleccionar y
dimensionarcomponentes ayuda aumentar la relación de costobeneficio
ya que se seleccionan los elementosadecuados sin sobredimensionar
el sistema lo quetrae como gran consecuencia el sobre-costo
delproyecto.
A través del proceso de manufactura de losinstrumentos y
actuadores necesarios se verifico lacriticidad de un buen sellado
en un sistemaneumático en donde las fugas significan perdida
depotencia.
Se aplicó un método de pilotaje eléctrico en el que
se verifica que se mejoran tiempos de un proceso alaplicar
automatización a un sistema mecánico. Se verifica la criticidad del
estudio de movimiento de
un mecanismo y la importancia que tiene sobre elmovimiento de
cualquier sistema neumático.
-
8/17/2019 Paper-proyecto Neumatica 2015 Ua
8/8
8
IX. R eferencias
[1] G. N. Salvatierra, «DISENO Y CALCULO DEPROTOTIPO DE UN
RECOLECTOR AUTOMATICO DEDESECHOS DOMESTICOS,» Instituto
PolitecnicoNacional , Mexico DF, 2012.
[2] A. Creus Solé, Neumatica e Hdráulica, España:
Marcombo, 2007.[3] A. Barber, Pneumatic Handbook, Elsevier
AdvancedTechnology, 1997.
[4] T. S.A, «http://www.toresa.com.ar,» [En línea]. Available:
http://www.toresa.com.ar/otros.pdf. [Últimoacceso: 21 Noviembre
2015].