Embed Size (px)
Citation preview
T.C.
KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
OTOMATĠK KONTROL SĠSTEMLERĠ
ĠNTERAKTĠF ve MODÜLER DENEY
SETĠ
196063 Gökhan ÖĞÜT
196105 Hakkı YILMAZ
196137 Servet KEMANCI
Prof. Dr. Ġsmail H. ALTAġ
Haziran 2013
TRABZON


T.C.
KARADENĠZ TEKNĠK ÜNĠVERSĠTESĠ
Mühendislik Fakültesi
Elektrik-Elektronik Mühendisliği Bölümü
OTOMATĠK KONTROL SĠSTEMLERĠ
ĠNTERAKTĠF ve MODÜLER DENEY
SETĠ
196063 Gökhan ÖĞÜT
196105 Hakkı YILMAZ
196137 Servet KEMANCI
Prof. Dr.Ġsmail H. ALTAġ
Haziran 2013
TRABZON

i
LİSANS BİTİRME PROJESİ ONAY FORMU
Servet Kemancı, Hakkı Yılmaz ve Gökhan Öğüt tarafından Prof. Dr. Ġsmail Hakkı AltaĢ
yönetiminde hazırlanan “Otomatik kontrol sistemleri interaktif ve modüler deney seti
tasarımı” baĢlıklı lisans bitirme projesi tarafımızdan incelenmiĢ, kapsamı ve niteliği
açısından bir Lisans Bitirme Projesi olarak kabul edilmiĢtir.
DanıĢman : Prof. Dr. Ġsmail H. ALTAġ ……………………………….
Jüri Üyesi 1 : Prof. Dr. Cemil Gürünlü ……………………………….
Jüri Üyesi 2 : ArĢ. Gör. Dr. Emre Özkop ……………………………….
Bölüm BaĢkanı : Prof. Dr. Ġsmail H. AltaĢ ……………………………….

ii
ÖNSÖZ
Bu bitirme projesinin teorik çalıĢmaları Karadeniz Teknik Üniversitesi Mühendislik
Fakültesi Elektrik-Elektronik Mühendisliği Bölümü öğrencileri tarafından deneysel
laboratuar çalıĢmalarına yardımcı olmak amacıyla hazırlanmıĢtır. Bu projenin dikkatlice
okunup uygulanması öğrencilerimizin iyi birer mühendis olmalarına katkı sağlayacaktır.
Bu projenin ilk taslaklarının hazırlanmasında emeği geçenlere, projenin son halini
almasında yol gösterici olan kıymetli hocamız Sayın Prof. Dr. Ġsmail H. ALTAġ‟a
teĢekkür ederiz. Deneysel çalıĢmaların tasarımında, teorik ve donanım konusunda bize
her zaman destek olan ArĢ. Gör. M. ġinasi AYAS‟a ve Öğr. Gör. Dr. Emre ÖZKOP‟a
Ģükranlarımızı sunmak istiyoruz. Ayrıca bu çalıĢmayı destekleyen Karadeniz Teknik
Üniversitesi Rektörlüğü‟ne Mühendislik Fakültesi Dekanlığına ve Elektrik-Elektronik
Mühendisliği Bölüm BaĢkanlığına içten teĢekkürlerimizi sunarız.
Her Ģeyden öte, eğitimim süresince bize her konuda tam destek veren ailelerimize ve
bize hayatlarıyla örnek olan tüm hocalarımıza saygı ve sevgilerimizi sunarız.
Haziran 2013
Hakkı Yılmaz
Gökhan Öğüt
Servet Kemancı


iii
İÇİNDEKİLER
Lisans Bitirme Projesi Onay Formu ……………………… i
Önsöz ……………………… ii
Ġçindekiler ……………………… iii
Özet ……………………… v
Semboller Ve Kısaltmalar ……………………… vi
1. GiriĢ ……………………… 1
1.1 Projenin Tanımı ve Varılmak Ġstenen Hedef ……………………… 1
1.2 Literatür ÇalıĢması ……………………… 1
1.3 Katkılar ……………………… 2
1.4 Yöntem ……………………… 3
1.5 ÇalıĢma Takvimleri ……………………… 5
2. Teorik Altyapı ……………………… 9
2.1. Kontrol Türleri ……………………… 9
2.1.1. Açık Çevrim Kontrolü ……………………… 9
2.1.2. Kapalı Çevrim Kontrolü ……………………… 10
2.2. Kontrolor Yapıları ……………………… 10
2.2.1. P (Oransal) Kontrol ……………………… 10
2.2.2. PI (Oransal ve Integral) Kontrol ……………………… 12
2.2.3. PD (Oransal ve Türev) Kontrol ……………………… 13
2.2.4. PID (Oransal, Integral ve Türev) Kontrol ……………………… 15
2.3. Denetlenecek Sistemler ……………………… 16
2.3.1. DA Jeneratörü Gerilim Kontrolü ……………………… 16
2.3.2. Sıcaklık Kontrolü ……………………… 17
3. Tasarım ……………………… 20
3.1. Malzeme Analizi ……………………… 20
3.2. Deney Setinin Tasarımı ……………………… 22
3.3. Deney Setinin Teknik Çizimi ……………………… 23
3.4. Deney Seti Modüllerinin Tanıtımı ……………………… 24
3.4.1. Kaynak Modülü ……………………… 24
3.4.1.1. Simetrik Güç Kaynağı ……………………… 24
3.4.1.2. ĠĢaret Kaynağı ……………………… 26
3.4.2. Kontrol Modülü ……………………… 28

iv
3.4.3. Denetlenecek Sistemler Modülü ……………………… 29
3.4.4. Gözlem Modülü ……………………… 29
4. Deneysel ÇalıĢmalar ve Simülasyonlar ……………………… 30
4.1. Deneysel ÇalıĢmalar ……………………… 30
4.1.1. DA Jeneratör ……………………… 30
4.1.2. Sıcaklık Kontrol ……………………… 31
4.2 Simülasyonlar ……………………… 33
4.2.1. DA Jeneratör Simülasyonu ……………………… 33
4.2.1.1. Oransal Kontrol ……………………… 35
4.2.1.2. PID Kontrol ……………………… 36
4.2.1.3. Kazanç Ayarı ……………………… 38
4.2.2. Sıcaklık Kontrol Simülasyonu ……………………… 39
4.2.2.1. Oransal Kontrol ……………………… 42
4.2.2.2. PID Kontrol ……………………… 43
4.2.2.3. Kazanç Ayarı ……………………… 45
5. Sonuçlar ……………………… 48
6. Yorum ve Değerlendirmeler ……………………… 48
Kaynaklar
Ekler
Ek.1 Standartlar ve Kısıtlar Formu

v
ÖZET
TasarlanmıĢ olan Modüler Kontrol Sistemleri Deney Seti ile Elektrik-Elektronik
Mühendisliği Bölümleri öncelikte olmak üzere benzeri mühendislik bölümlerinde
okutulmakta olan Otomatik Kontrol Sistemleri derslerinin uygulamalı olarak
öğretilmesine katkı sağlanacaktır. Yapılan deney seti modüler olma özelliği sayesinde
daha ekonomik, kullanım ve geliĢtirilme özellikleri sayesinde amaca ve öğretim
hedeflerine göre büyültülebilecek ya da küçültülebilecektir. Öğrenci teorinin pratikle
uyumunu öğrenirken, tasarım yapmayı ve teoriyle pratiği birleĢtirip ortaya bir ürün
çıkarabilme becerisini de kazandıracaktır. OluĢturulan deney seti, bilgisayar destekli,
birleĢik, hafif ve hızlı-kolay kurulum özelliklerine sahip olacaktır.

vi
SEMBOLLER VE KISALTMALAR
DA Doğru Akım
P Oransal
PI Oransal ve Integral
PD Oransal ve Türev
PID Oransal , Integral ve Türev
Kp Oransal Kontrol Sabiti
Ki Ġntegral Kontrol Sabiti
Kd Türev Kontrol Sabiti
PB Orantı Bandı
kg Kilogram
M Metre
S Saniye
N Newton
Amp Amper
r(t) GiriĢ Fonksiyonu
G(s) Transfer Fonksiyonu
y(t) ÇıkıĢ Fonksiyonu
q(t) Bozucu Etki

vii
ÇİZELGE LİSTESİ Sayfa No
Çizelge 1.1: Ortak çalıĢma takvimi …………………… 5
Çizelge 1.2: Gökhan Öğüt için çalıĢma takvimi …………………… 6
Çizelge 1.3: Hakkı Yılmaz için çalıĢma takvimi …………………… 7
Çizelge 1.4: Servet Kemancı için çalıĢma takvimi …………………… 8
Çizelge 3.1: Malzeme Listesi …………………… 21
Çizelge 4.1: NTC Akım Gerilim Direnç Sıcaklık ĠliĢkisi …………………… 32


viii
ŞEKİL LİSTESİ Sayfa No
Şekil 2.1. Açık çevrim kontrol blok diyagramı …………… 9
Şekil 2.2. Kapalı çevrim kontrol blok diyagramı …………… 10
Şekil 2.3. P kontrol sistemin elektriksel eĢdeğer devresi …………… 11
Şekil 2.4. P kontrollü sistemin blok diyagramı …………… 11
Şekil 2.5. PI kontrol sistemin elektriksel eĢdeğer devresi …………… 12
Şekil 2.6. PI kontrollü sistemin blok diyagramı …………… 13
Şekil 2.7. PD kontrol sistemin elektriksel eĢdeğer devresi …………… 13
Şekil 2.8. PD kontrollü sistemin blok diyagramı …………… 14
Şekil 2.9. PID kontrol sistemin elektriksel eĢdeğer devresi …………… 15
Şekil 2.10. PID kontrollü sistemin blok diyagramı …………… 16
Şekil 2.11. DA Jeneratör Gerilim Kontrolü …………… 17
Şekil 2.12. DA Jeneratör Gerilim Kontrolü Üstten Görünüm …………… 17
Şekil 2.13. Sıcaklık Kontrol Devresi …………… 18
Şekil 2.14. Sıcaklık Kontrol Devresi Üstten Görünüm …………… 19
Şekil 3.1. Deney Setinin Tasarımı …………… 22
Şekil 3.2. Deney Seti Teknik Çizimi …………… 23
Şekil 3.3. Deney Seti Genel Görünüm …………… 24
Şekil 3.4. Simetrik Güç Kaynağı Devresi …………… 25
Şekil 3.5. Simetrik Güç Kaynağı Devresi Üstten Görünüm …………… 25
Şekil 3.6. LM348 Ġç Yapısı …………… 26
Şekil 3.7. ĠĢaret Üreteci Devresi …………… 26
Şekil 3.8. ĠĢaret Üreteci Devresi Üstten Görünüm …………… 27
Şekil 3.9. Kontrol Modülü Tasarımı …………… 28
Şekil 3.10. Kontrol Modülü Üstten Görünüm …………… 29
Şekil 4.1. DA Jenerator Gerlim Kontrolü Devresi …………… 30
Şekil 4.2. Sıcaklık Kontrol Devresi …………… 32
Şekil 4.3. PID Geri Besleme Blok Diyagramı …………… 33
Şekil 4.4. DA Jenerator Blok Diyagramı …………… 33
Şekil 4.5. DA Jenerator EĢdeğer Devresi …………… 34
Şekil 4.6.
P Kontrol Basamak Tepkesi …………… 36
ix
Şekil 4.7. PID Kontrol Basamak Tepkesi
(Kp=100,Ki=1,Kd=1)
…………… 38
Şekil 4.8. PID Kontrol Basamak Tepkesi
(Kp=100,Ki=15,Kd=1)
…………… 38
Şekil 4.9. PID Kontrol kazanç Ayarı
(Kp=100,Ki=15,Kd=20)
…………… 39
Şekil 4.10. Sıcaklık Kontrol Deney ġeması …………… 40
Şekil 4.11. NTC Akım Gerilim Karakteristiği …………… 40
Şekil 4.12. Sıcaklık Kontrol Sistemi Blok Diyagramı …………… 41
Şekil 4.13. PID Kontrol Basamak Tepkesi
(Kp=1,Ki=1,Kd=1)
…………… 43
Şekil 4.14. PID Kontrol Basamak Tepkesi
(Kp=100,Ki=1,Kd=1)
…………… 44
Şekil 4.15. PID Kontrol Basamak Tepkesi
(Kp=100,Ki=7,Kd=1)
…………… 46
Şekil 4.16. PID Kontrol Basamak Tepkesi
(Kp=1,Ki=7,Kd=2)
…………… 47
1
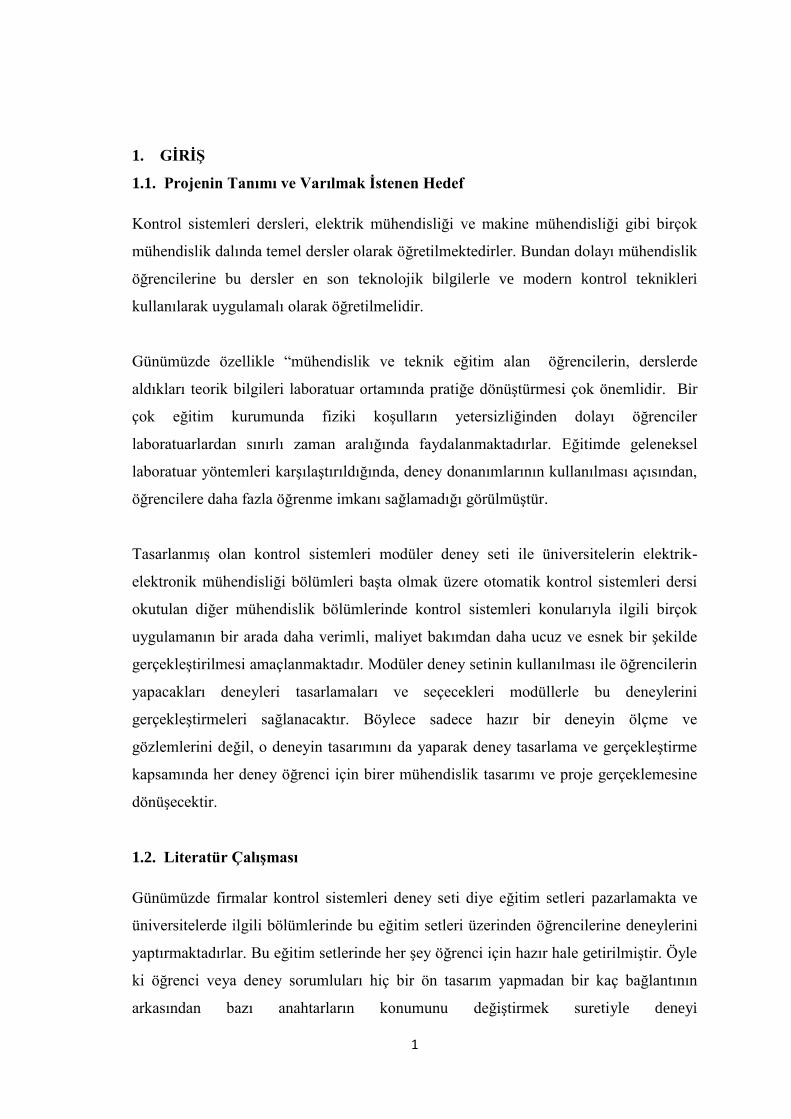
1. GİRİŞ
1.1. Projenin Tanımı ve Varılmak İstenen Hedef
Kontrol sistemleri dersleri, elektrik mühendisliği ve makine mühendisliği gibi birçok
mühendislik dalında temel dersler olarak öğretilmektedirler. Bundan dolayı mühendislik
öğrencilerine bu dersler en son teknolojik bilgilerle ve modern kontrol teknikleri
kullanılarak uygulamalı olarak öğretilmelidir.
Günümüzde özellikle “mühendislik ve teknik eğitim alan öğrencilerin, derslerde
aldıkları teorik bilgileri laboratuar ortamında pratiğe dönüĢtürmesi çok önemlidir. Bir
çok eğitim kurumunda fiziki koĢulların yetersizliğinden dolayı öğrenciler
laboratuarlardan sınırlı zaman aralığında faydalanmaktadırlar. Eğitimde geleneksel
laboratuar yöntemleri karĢılaĢtırıldığında, deney donanımlarının kullanılması açısından,
öğrencilere daha fazla öğrenme imkanı sağlamadığı görülmüĢtür.
TasarlanmıĢ olan kontrol sistemleri modüler deney seti ile üniversitelerin elektrik-
elektronik mühendisliği bölümleri baĢta olmak üzere otomatik kontrol sistemleri dersi
okutulan diğer mühendislik bölümlerinde kontrol sistemleri konularıyla ilgili birçok
uygulamanın bir arada daha verimli, maliyet bakımdan daha ucuz ve esnek bir Ģekilde
gerçekleĢtirilmesi amaçlanmaktadır. Modüler deney setinin kullanılması ile öğrencilerin
yapacakları deneyleri tasarlamaları ve seçecekleri modüllerle bu deneylerini
gerçekleĢtirmeleri sağlanacaktır. Böylece sadece hazır bir deneyin ölçme ve
gözlemlerini değil, o deneyin tasarımını da yaparak deney tasarlama ve gerçekleĢtirme
kapsamında her deney öğrenci için birer mühendislik tasarımı ve proje gerçeklemesine
dönüĢecektir.
1.2. Literatür Çalışması
Günümüzde firmalar kontrol sistemleri deney seti diye eğitim setleri pazarlamakta ve
üniversitelerde ilgili bölümlerinde bu eğitim setleri üzerinden öğrencilerine deneylerini
yaptırmaktadırlar. Bu eğitim setlerinde her Ģey öğrenci için hazır hale getirilmiĢtir. Öyle
ki öğrenci veya deney sorumluları hiç bir ön tasarım yapmadan bir kaç bağlantının
arkasından bazı anahtarların konumunu değiĢtirmek suretiyle deneyi

2
gerçekleĢtirmektedirler. Bu kontrol eğitim setlerinin neredeyse tüm bağlantıları
yapılmıĢ, geriye çok az bağlantı bırakılmıĢ, gerekli düzenleme, tasarım ve testlerin
sadece bazı anahtarların konumlarının değiĢtirilmesi ile yapılmaktadır. Bu tip deney
setleri öğrencinin öğrenmesinden onların veri kaydeden gözlemci olmasına sebep
olmaktadır. Bu eğitim setlerinde yapılacak deney sayısı sınırlı olduğundan sadece
üzerine sabitlenmiĢ malzemelerin izin verdiği ölçüde ölçme ve gözlem
yapılabilmektedir. Bu tür deney setleri ile aslında öğrenci teori ile pratiği sadece sonuç
bazında karĢılaĢtırıp değerlendirme yapabilmektedir. Bu pratik kısmın nasıl tasarlandığı
ve gerçeklendiği konusunda bir Ģey öğrenememektedir.
Yıldırım Elektronik gibi bazı firmalarda PID (Oransal-Ġntegra-Türev) kontrol modülü
üretilmektedir. Bu modül PID üzerinde farklı sinyaller uygulanarak temel ilkelerin
öğrenilmesi için tasarlanmıĢtır. Bununla beraber deney seti üzerinde tasarım yapma
imkanı kısıtlanmıĢtır.
Yakın Doğu Üniversitesinde PID ile sıcaklık kontrol deney seti tasarlanmıĢtır. Bu
çalıĢmada bir kap içerisindeki suyun sıcaklığını belirli bir değerde tutulması için pıd
denetleyicilerden faydalanılmıĢtır. Ayrıca bu projede piyasada satılan kontrol deney
setlerinin maliyetinin fazla olması sebebiyle daha ucuz bir kontrol deney seti üretilmesi
amaçlanmıĢtır.
Balıkesir Üniversitesi Fen Bilimleri enstitüsünde 2009 yılında Akif Birol Dumanay
tarafından DC Motorun PID ile hız denetimi için uzaktan laboratuvar uygulaması
görülmüĢtür. Hazırlanan bu sistemde sanal bir laboratuarda web tabanlı bir
uygulamayla öğrencilere sanal laboratuarda deneyleri gerçekleme imkanı sunulmuĢtur.
Kocaeli Üniversitesi elektrik-elektronik bölümünde 2006 yılında Mehmet Poyraz PID
kontrolü ile doğru akım motorunun hız kontrolünü, PID ile yükseklik denetimini ve
top-kiriĢ problemlerine çözüm sunmuĢtur.
1.3. Katkılar
Bir deney seti öğrenciye teorinin pratikle uyumunu öğretirken onu tasarım yapmaya,
teoriyle pratiği birleĢtirip ortaya bir ürün çıkarabilme becerisini de kazandırmalıdır. Bu
nedenle burada tasarlanmıĢ olan deney düzeneğinin var olanlardan farkı, deneylerin alt
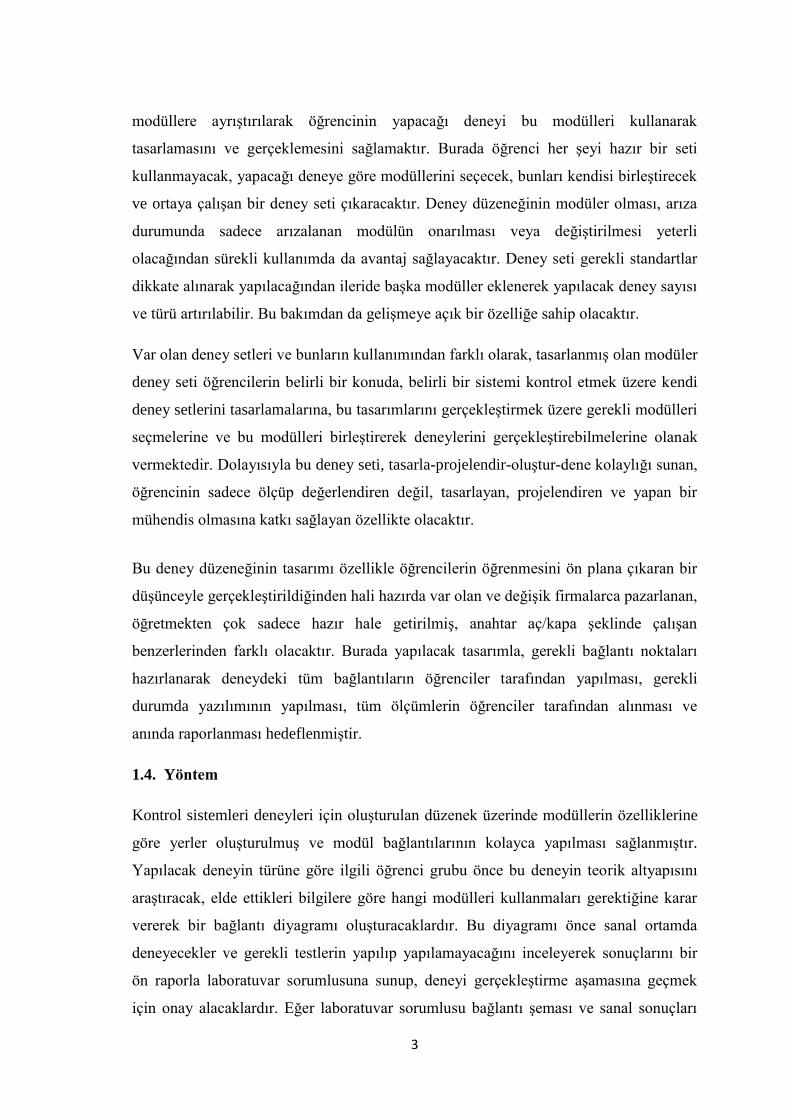
3
modüllere ayrıĢtırılarak öğrencinin yapacağı deneyi bu modülleri kullanarak
tasarlamasını ve gerçeklemesini sağlamaktır. Burada öğrenci her Ģeyi hazır bir seti
kullanmayacak, yapacağı deneye göre modüllerini seçecek, bunları kendisi birleĢtirecek
ve ortaya çalıĢan bir deney seti çıkaracaktır. Deney düzeneğinin modüler olması, arıza
durumunda sadece arızalanan modülün onarılması veya değiĢtirilmesi yeterli
olacağından sürekli kullanımda da avantaj sağlayacaktır. Deney seti gerekli standartlar
dikkate alınarak yapılacağından ileride baĢka modüller eklenerek yapılacak deney sayısı
ve türü artırılabilir. Bu bakımdan da geliĢmeye açık bir özelliğe sahip olacaktır.
Var olan deney setleri ve bunların kullanımından farklı olarak, tasarlanmıĢ olan modüler
deney seti öğrencilerin belirli bir konuda, belirli bir sistemi kontrol etmek üzere kendi
deney setlerini tasarlamalarına, bu tasarımlarını gerçekleĢtirmek üzere gerekli modülleri
seçmelerine ve bu modülleri birleĢtirerek deneylerini gerçekleĢtirebilmelerine olanak
vermektedir. Dolayısıyla bu deney seti, tasarla-projelendir-oluĢtur-dene kolaylığı sunan,
öğrencinin sadece ölçüp değerlendiren değil, tasarlayan, projelendiren ve yapan bir
mühendis olmasına katkı sağlayan özellikte olacaktır.
Bu deney düzeneğinin tasarımı özellikle öğrencilerin öğrenmesini ön plana çıkaran bir
düĢünceyle gerçekleĢtirildiğinden hali hazırda var olan ve değiĢik firmalarca pazarlanan,
öğretmekten çok sadece hazır hale getirilmiĢ, anahtar aç/kapa Ģeklinde çalıĢan
benzerlerinden farklı olacaktır. Burada yapılacak tasarımla, gerekli bağlantı noktaları
hazırlanarak deneydeki tüm bağlantıların öğrenciler tarafından yapılması, gerekli
durumda yazılımının yapılması, tüm ölçümlerin öğrenciler tarafından alınması ve
anında raporlanması hedeflenmiĢtir.
1.4. Yöntem
Kontrol sistemleri deneyleri için oluĢturulan düzenek üzerinde modüllerin özelliklerine
göre yerler oluĢturulmuĢ ve modül bağlantılarının kolayca yapılması sağlanmıĢtır.
Yapılacak deneyin türüne göre ilgili öğrenci grubu önce bu deneyin teorik altyapısını
araĢtıracak, elde ettikleri bilgilere göre hangi modülleri kullanmaları gerektiğine karar
vererek bir bağlantı diyagramı oluĢturacaklardır. Bu diyagramı önce sanal ortamda
deneyecekler ve gerekli testlerin yapılıp yapılamayacağını inceleyerek sonuçlarını bir
ön raporla laboratuvar sorumlusuna sunup, deneyi gerçekleĢtirme aĢamasına geçmek
için onay alacaklardır. Eğer laboratuvar sorumlusu bağlantı Ģeması ve sanal sonuçları

4
uygun bulursa öğrenci grubu bu defa gerçek modülleri kullanarak deneyini oluĢturacak
ve deneye hazır hale getirecektir.
Test sırasında yapılan ölçümler ilgili ölçü aletleriyle ölçülüp kaydedilecek, bazı
ölçümlere ait veriler ise veri toplama üniteleri ile bilgisayara aktarılıp değerlendirilmek
üzere burada depolanacaktır. Okunarak kaydedilen veya veri aktarım modülüyle
toplanan veriler deney sonunda hemen değerlendirmeye alınarak rapor hazırlanacak ve
bu rapor hemen laboratuvar online rapor kutusuna gönderilecektir. Her deney setinde
internet eriĢimi olan bir bilgisayar modülü bulunacak, hem okunan ölçümler hem de
aktarılan veriler bu bilgisayarda kurulu bir yazılım üzerinden değerlendirilerek raporlar
hazırlanacaktır. Hazırlanacak olan raporların rapor kutusuna gönderilmesiyle deney
tamamlanmıĢ olacaktır.
5
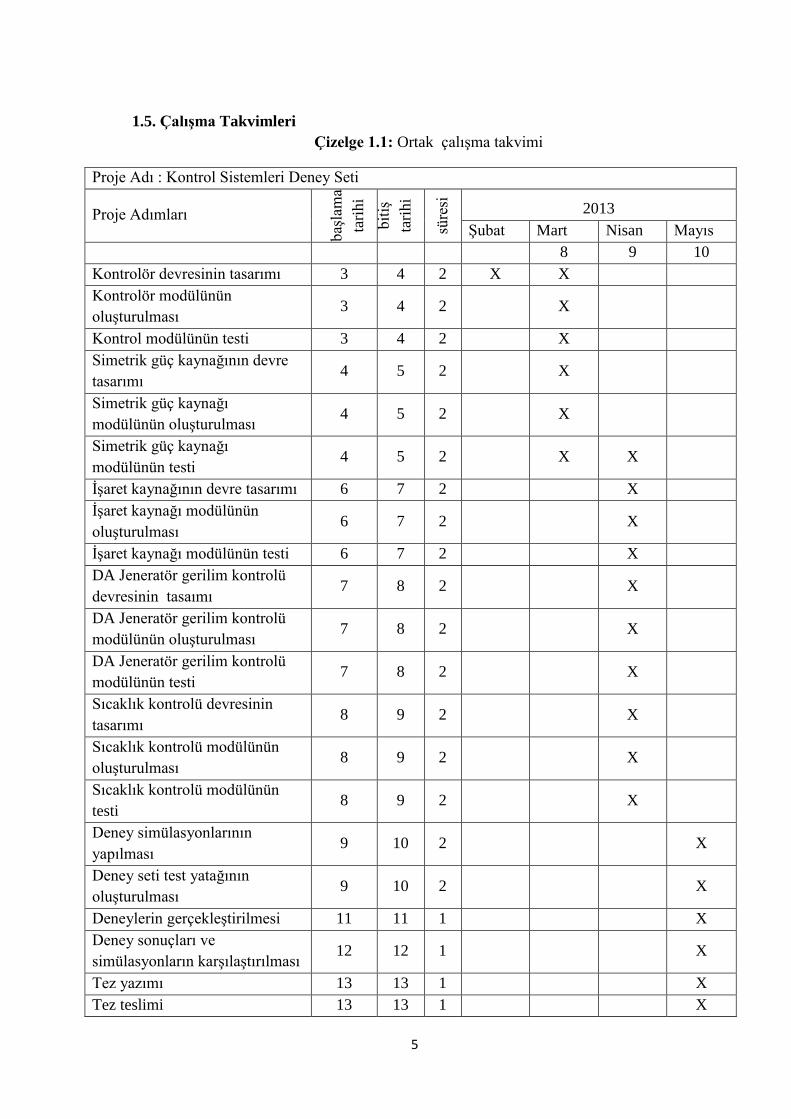
1.5. Çalışma Takvimleri
Çizelge 1.1: Ortak çalıĢma takvimi
Proje Adı : Kontrol Sistemleri Deney Seti
Proje Adımları
baĢ
lam
a
tari
hi
bit
iĢ
tari
hi
süre
si
2013
ġubat Mart Nisan Mayıs
8 9 10
Kontrolör devresinin tasarımı 3 4 2 X X
Kontrolör modülünün
oluĢturulması 3 4 2 X
Kontrol modülünün testi 3 4 2 X
Simetrik güç kaynağının devre
tasarımı 4 5 2 X
Simetrik güç kaynağı
modülünün oluĢturulması 4 5 2 X
Simetrik güç kaynağı
modülünün testi 4 5 2 X X
ĠĢaret kaynağının devre tasarımı 6 7 2 X
ĠĢaret kaynağı modülünün
oluĢturulması 6 7 2 X
ĠĢaret kaynağı modülünün testi 6 7 2 X
DA Jeneratör gerilim kontrolü
devresinin tasaımı 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün oluĢturulması 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün testi 7 8 2 X
Sıcaklık kontrolü devresinin
tasarımı 8 9 2 X
Sıcaklık kontrolü modülünün
oluĢturulması 8 9 2 X
Sıcaklık kontrolü modülünün
testi 8 9 2 X
Deney simülasyonlarının
yapılması 9 10 2 X
Deney seti test yatağının
oluĢturulması 9 10 2 X
Deneylerin gerçekleĢtirilmesi 11 11 1 X
Deney sonuçları ve
simülasyonların karĢılaĢtırılması 12 12 1 X
Tez yazımı 13 13 1 X
Tez teslimi 13 13 1 X

6
Çizelge 1.2: Gökhan ÖĞÜT için çalıĢma takvimi
Proje Adı : Kontrol Sistemleri Deney Seti
Proje Adımları
baĢ
lam
a
tari
hi
bit
iĢ
tari
hi
süre
si
2013
ġubat Mart Nisan Mayıs
8 9 10
Kontrolör devresinin tasarımı 3 4 2
Kontrolör modülünün
oluĢturulması 3 4 2
Kontrol modülünün testi 3 4 2 X
Simetrik güç kaynağının devre
tasarımı 4 5 2
Simetrik güç kaynağı
modülünün oluĢturulması 4 5 2 X
Simetrik güç kaynağı
modülünün testi 4 5 2 X X
ĠĢaret kaynağının devre tasarımı 6 7 2
ĠĢaret kaynağı modülünün
oluĢturulması 6 7 2 X
ĠĢaret kaynağı modülünün testi 6 7 2 X
DA Jeneratör gerilim kontrolü
devresinin tasaımı 7 8 2
DA Jeneratör gerilim kontrolü
modülünün oluĢturulması 7 8 2
DA Jeneratör gerilim kontrolü
modülünün testi 7 8 2 X
Sıcaklık kontrolü devresinin
tasarımı 8 9 2 X
Sıcaklık kontrolü modülünün
oluĢturulması 8 9 2 X
Sıcaklık kontrolü modülünün
testi 8 9 2 X
Deney simülasyonlarının
yapılması 9 10 2 X
Deney seti test yatağının
oluĢturulması 9 10 2 X
Deneylerin gerçekleĢtirilmesi 11 11 1 X
Deney sonuçları ve
simülasyonların karĢılaĢtırılması 12 12 1 X
Tez yazımı 13 13 1 X
Tez teslimi 13 13 1 X
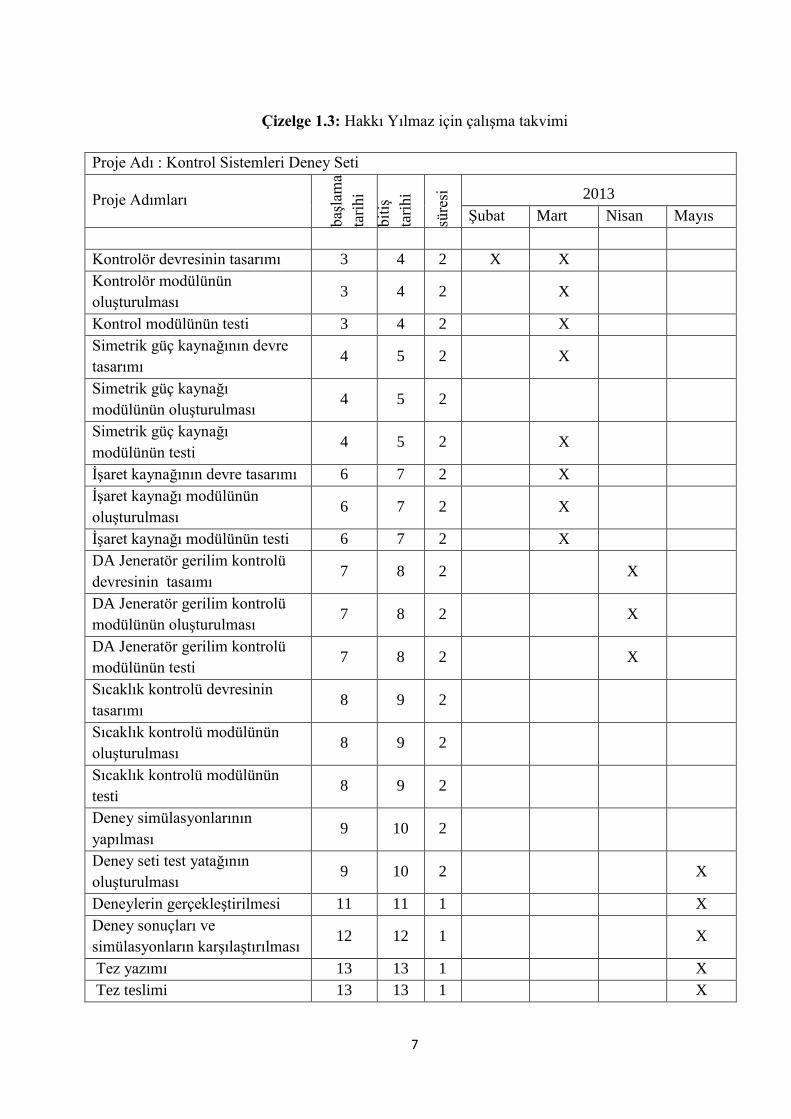
7
Çizelge 1.3: Hakkı Yılmaz için çalıĢma takvimi
Proje Adı : Kontrol Sistemleri Deney Seti
Proje Adımları
baĢ
lam
a
tari
hi
bit
iĢ
tari
hi
süre
si
2013
ġubat Mart Nisan Mayıs
Kontrolör devresinin tasarımı 3 4 2 X X
Kontrolör modülünün
oluĢturulması 3 4 2 X
Kontrol modülünün testi 3 4 2 X
Simetrik güç kaynağının devre
tasarımı 4 5 2 X
Simetrik güç kaynağı
modülünün oluĢturulması 4 5 2
Simetrik güç kaynağı
modülünün testi 4 5 2 X
ĠĢaret kaynağının devre tasarımı 6 7 2 X
ĠĢaret kaynağı modülünün
oluĢturulması 6 7 2 X
ĠĢaret kaynağı modülünün testi 6 7 2 X
DA Jeneratör gerilim kontrolü
devresinin tasaımı 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün oluĢturulması 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün testi 7 8 2 X
Sıcaklık kontrolü devresinin
tasarımı 8 9 2
Sıcaklık kontrolü modülünün
oluĢturulması 8 9 2
Sıcaklık kontrolü modülünün
testi 8 9 2
Deney simülasyonlarının
yapılması 9 10 2
Deney seti test yatağının
oluĢturulması 9 10 2 X
Deneylerin gerçekleĢtirilmesi 11 11 1 X
Deney sonuçları ve
simülasyonların karĢılaĢtırılması 12 12 1 X
Tez yazımı 13 13 1 X
Tez teslimi 13 13 1 X
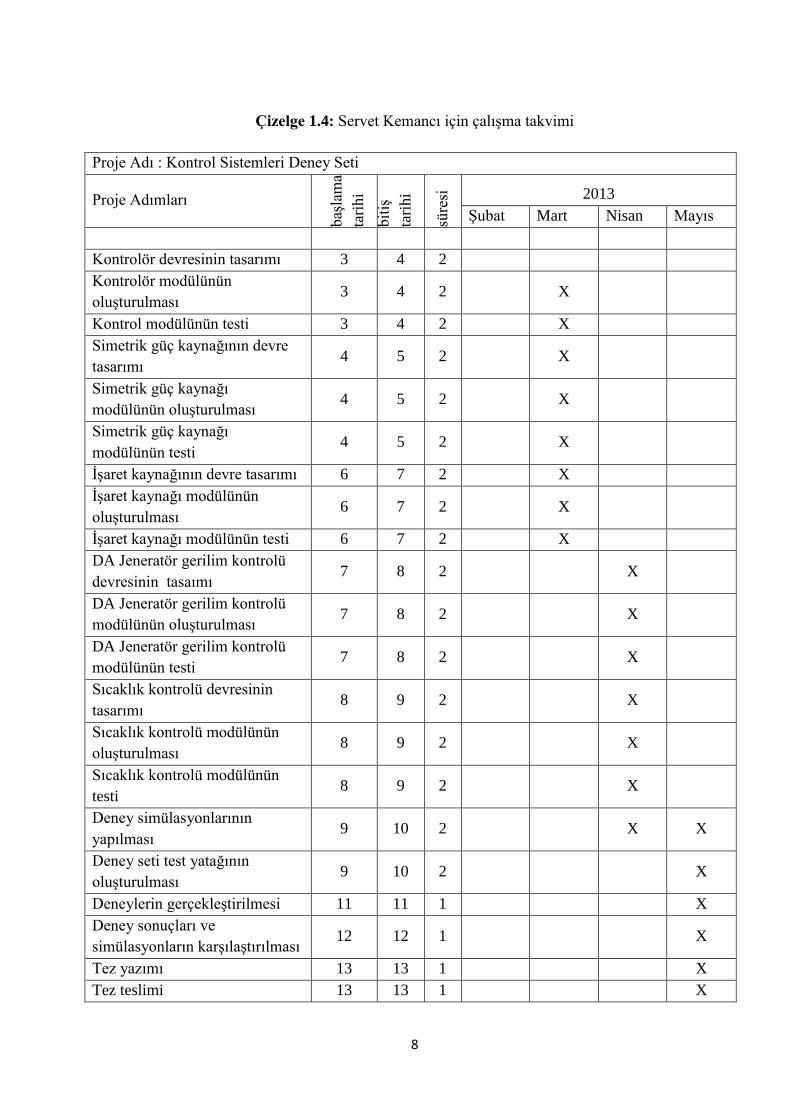
8
Çizelge 1.4: Servet Kemancı için çalıĢma takvimi
Proje Adı : Kontrol Sistemleri Deney Seti
Proje Adımları
baĢ
lam
a
tari
hi
bit
iĢ
tari
hi
süre
si
2013
ġubat Mart Nisan Mayıs
Kontrolör devresinin tasarımı 3 4 2
Kontrolör modülünün
oluĢturulması 3 4 2 X
Kontrol modülünün testi 3 4 2 X
Simetrik güç kaynağının devre
tasarımı 4 5 2 X
Simetrik güç kaynağı
modülünün oluĢturulması 4 5 2 X
Simetrik güç kaynağı
modülünün testi 4 5 2 X
ĠĢaret kaynağının devre tasarımı 6 7 2 X
ĠĢaret kaynağı modülünün
oluĢturulması 6 7 2 X
ĠĢaret kaynağı modülünün testi 6 7 2 X
DA Jeneratör gerilim kontrolü
devresinin tasaımı 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün oluĢturulması 7 8 2 X
DA Jeneratör gerilim kontrolü
modülünün testi 7 8 2 X
Sıcaklık kontrolü devresinin
tasarımı 8 9 2 X
Sıcaklık kontrolü modülünün
oluĢturulması 8 9 2 X
Sıcaklık kontrolü modülünün
testi 8 9 2 X
Deney simülasyonlarının
yapılması 9 10 2 X X
Deney seti test yatağının
oluĢturulması 9 10 2 X
Deneylerin gerçekleĢtirilmesi 11 11 1 X
Deney sonuçları ve
simülasyonların karĢılaĢtırılması 12 12 1 X
Tez yazımı 13 13 1 X
Tez teslimi 13 13 1 X
9
2. Teorik Altyapı
Otomatik kontrol sistemlerinin son yıllarda hem bilimsel çalıĢma alanı hemde
günlük hayat kullanım alanı gittikçe artmaktadır. Aslında otomatik kontrol
sistemleri fiziksel ve kimyasal etkilerin tamamını insane gücüne bağlı olmaksızın
kontrol edilmesini amaçlar. En basit uygulama alanından en zor en karmaĢık
uygulama alanlarına kadar çok geniĢ bir yelpazede otomatik kontrol sistemlerine
ihtiyaç duyulmaktadır.
Bunun nedeni Ģu Ģekilde sıralanabilir.
Otomatik kontrol, insanları monoton tekrarlı iĢlerden kurtararak zeka ve
düĢünebilme yeteneklerini daha iyi kullanabilecekleri iĢlere yönelmelerini sağlar.
Otomatik kontrol, insanların fiziksel yetenlerin aĢan çok hızlı, çok hassas, iĢlerde
insanın hakimiyetini kolaylaĢtırır.
Otomatik kontrol, mühendislere hem teorik ve tasarım hemde gerçekleme ve
uygulama aĢamalarında daha sade, esnek ve yüksek verimli çözüm fırsatları
sunmaktadır [1].
2.1. Kontrolör Türleri
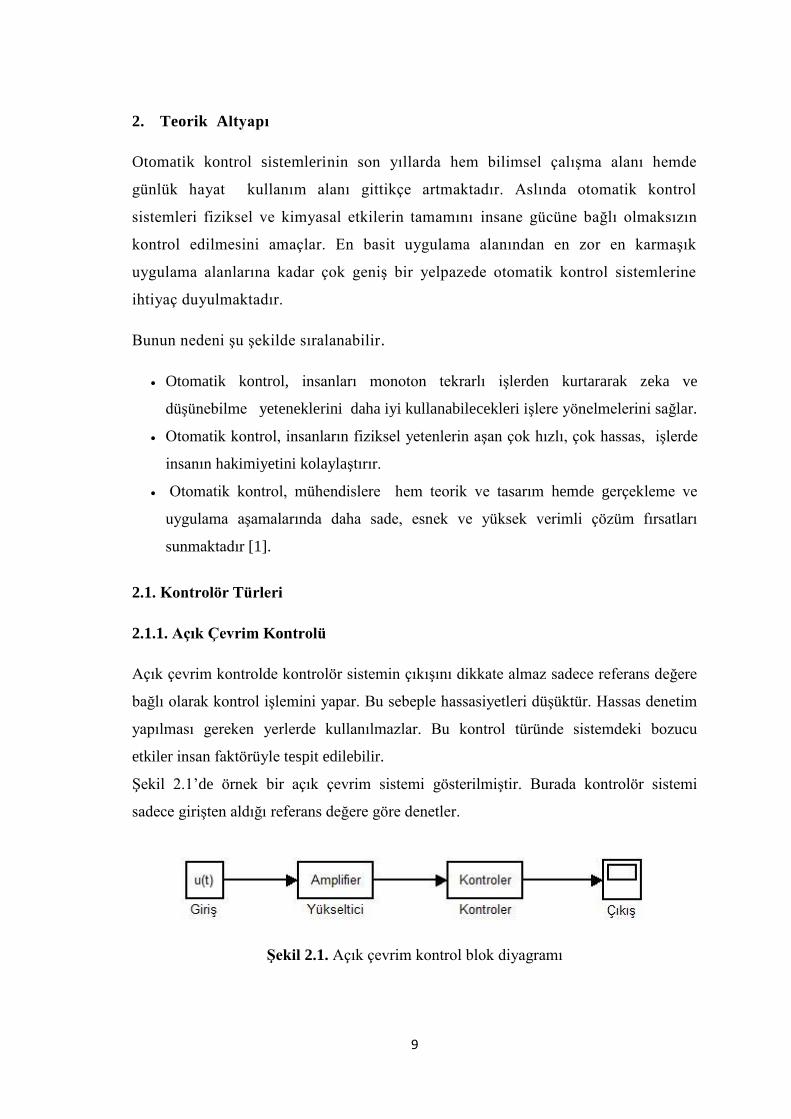
2.1.1. Açık Çevrim Kontrolü
Açık çevrim kontrolde kontrolör sistemin çıkıĢını dikkate almaz sadece referans değere
bağlı olarak kontrol iĢlemini yapar. Bu sebeple hassasiyetleri düĢüktür. Hassas denetim
yapılması gereken yerlerde kullanılmazlar. Bu kontrol türünde sistemdeki bozucu
etkiler insan faktörüyle tespit edilebilir.
ġekil 2.1‟de örnek bir açık çevrim sistemi gösterilmiĢtir. Burada kontrolör sistemi
sadece giriĢten aldığı referans değere göre denetler.
Şekil 2.1. Açık çevrim kontrol blok diyagramı

10
2.1.2 Kapalı Çevrim Kontrolü
Kapalı döngülü denetim sistemi; Açık döngülü denetim sisteminin aksine kontrol
edilen sistemin çıkıĢı ölçülür ve ġekil 2.2‟de görüldüğü gibi geri beslemeyle tekrar
sistemin giriĢine verilir referans değeri ile karĢılaĢtırılır ve kontrolör sayesinde de
sistemin çıkıĢ değeri arzu edilen değere oldukça yakın tutulur. Kapalı döngülü denetim
sisteminin temel mantığı geri beslemedir. Bu sayede çok hassas kontroller yapılabilir
[2].
Şekil 2.2. Kapalı çevrim kontrol blok diyagramı
PID kontrol kapalı çevrime güzel bir örnektir. Bu çalıĢmada sistem kontrolü PID ile
yapılmıĢtır. PID denetim ve geri besleme; kontrol mühendisliğinin en temel konularıdır.
2.2. Kontrolör Yapıları
2.2.1 P (Oransal) Kontrol
P (Oransal) kontrol ġekil 2.3‟te gösterildiği gibi 3 adet LM741 opamp (yükselteç) ve
uygun değerde dirençler kullanılarak tasarlanabilir. Oransal kontrol fark alıcı (hata
algılayıcı) kat, oransal kat ve tersleyici kattan oluĢmaktadır. Bu katlarda kullanılan
opamplar aynı olmasına karĢın üzerlerine bağlanan direnç bağlantı Ģekilleri ve direnç
değerleri bunların farklı Ģekilde çalıĢmalarına sebep olmaktadır.

11
Şekil 2.3. P kontrol sistemin elektriksel eĢdeğer devresi
Eğer oransal kontrolde, kontrolörün çıkıĢına u(t) giriĢine de e(t) dersek giriĢ ve çıkıĢ
birbiriyle orantılı olacaktır. GiriĢle çıkıĢ arasındaki bağıntı;
u(t)=Kp . e(t) (2.1)
Ģeklinde olur. Burada e(t) hata sinyalidir.U(t) ve e(t) arasındaki oran Kp oransal kazanç
olarak adlandırılır.Oransal etkinin transfer fonksiyonu;
U(s)
E(s)= Kp (2.2)
Ģeklindedir. Kp değeri aynı zamanda;
Kp=R6
R5 (2.3)
Ģeklindede ifade edilir. Bu ifadeden anlaĢıldığı üzere Kp değeri R6 ve R5 değiĢkenleri
sayesinde istenilen değere ayarlanabilir.
ġekil 2.4„de oransal kontrolün blok Ģeması verilmiĢtir.
Şekil 2.4. P kontrollü sistemin blok diyagramı

12
Burada konrolörden çıkan u(t) sinyali denetlenen sisteme veriliyor. Sitemin çıkıĢıda geri
besleme ile referans değerle karĢılaĢtırılıyor. Bunun sonucunda e(t) hata sinyali elde
ediliyor. Oransal kontrolde u(t) sinyali e(t) sinyali ile orantılı olarak değiĢir. Bu değiĢim
hata büyük iken büyük küçük iken küçüktür. Hatta hata çok küçük değerde ise kontrolör
gerekli düzeltici iĢareti sağlayamaz. Bu problem nedeniyle oransal kontrolde kalıcı
durum hatası oluĢur. Kalıcı durum hatası kp değerinin değiĢtirilmesi ile yok
edilemesede azaltılabilir. Oransal kontrolörün en önemli özelliği yapısının çok bait
olmasıdır.
2.1.2 PI (Oransal ve Integral) Kontrol
PI Kontrol ġekil 2.5‟de görüldüğü gibi P kontrolöre I (integral) katı eklenerek
oluĢturulur.
Şekil 2.5. PI kontrol sistemin elektriksel eĢdeğer devresi
Ġntegral kontrolde u(t) sinyali hata sinyali e(t) ile orantılı bir Ģekilde değiĢir. Bu da P
kontrolde ortaya çıkan kalıcı-durum hatasının giderilmsini sağlar.
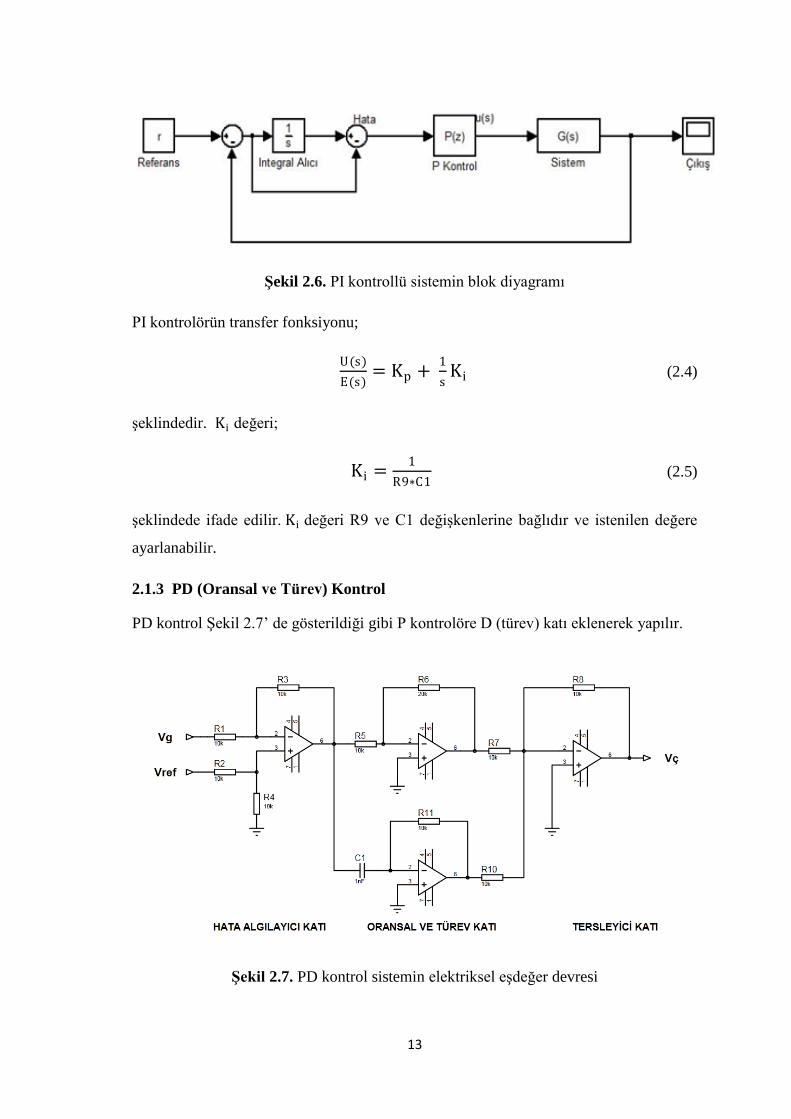
PI kontrollü bir sistemin blok Ģeması ġekil 2.6‟da verilmiĢtir.
13
Şekil 2.6. PI kontrollü sistemin blok diyagramı
PI kontrolörün transfer fonksiyonu;
U(s)
E(s)= Kp +
1
sKi (2.4)
Ģeklindedir. Ki değeri;
Ki =1
R9∗C1 (2.5)
Ģeklindede ifade edilir. Ki değeri R9 ve C1 değiĢkenlerine bağlıdır ve istenilen değere
ayarlanabilir.
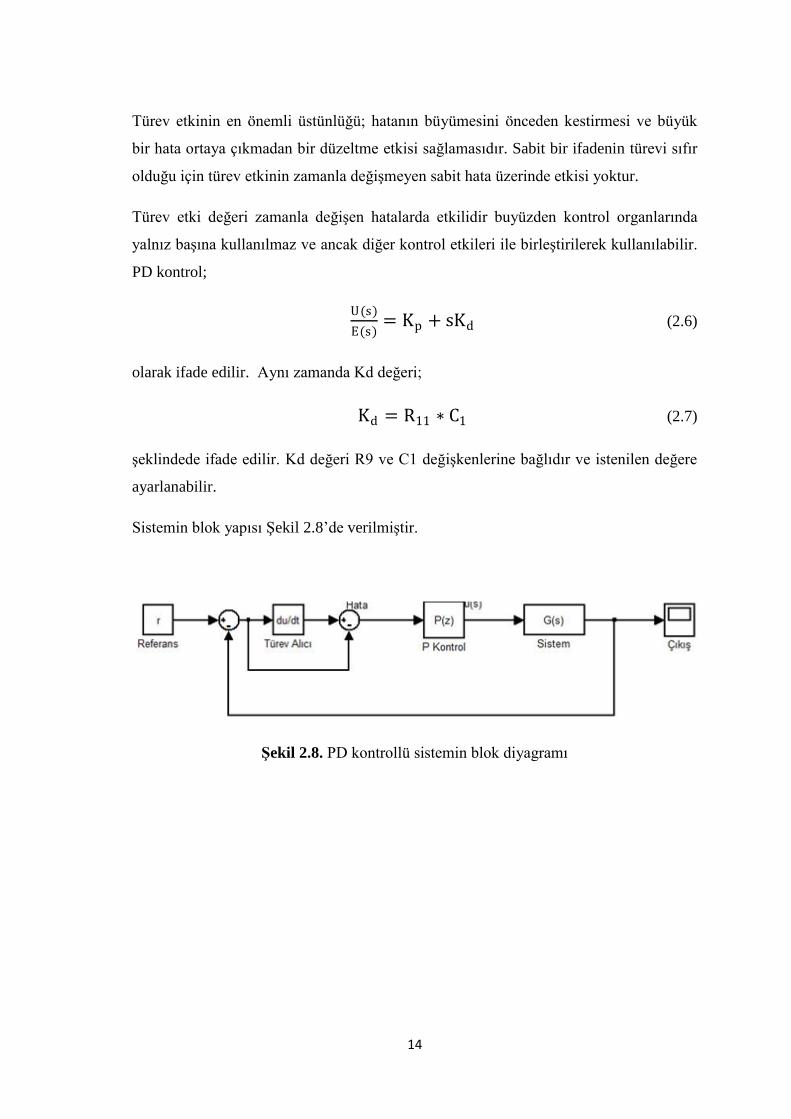
2.1.3 PD (Oransal ve Türev) Kontrol
PD kontrol ġekil 2.7‟ de gösterildiği gibi P kontrolöre D (türev) katı eklenerek yapılır.
Şekil 2.7. PD kontrol sistemin elektriksel eĢdeğer devresi
14
Türev etkinin en önemli üstünlüğü; hatanın büyümesini önceden kestirmesi ve büyük
bir hata ortaya çıkmadan bir düzeltme etkisi sağlamasıdır. Sabit bir ifadenin türevi sıfır
olduğu için türev etkinin zamanla değiĢmeyen sabit hata üzerinde etkisi yoktur.
Türev etki değeri zamanla değiĢen hatalarda etkilidir buyüzden kontrol organlarında
yalnız baĢına kullanılmaz ve ancak diğer kontrol etkileri ile birleĢtirilerek kullanılabilir.
PD kontrol;
U(s)
E(s)= Kp + sKd (2.6)
olarak ifade edilir. Aynı zamanda Kd değeri;
Kd = R11 ∗ C1 (2.7)
Ģeklindede ifade edilir. Kd değeri R9 ve C1 değiĢkenlerine bağlıdır ve istenilen değere
ayarlanabilir.
Sistemin blok yapısı ġekil 2.8‟de verilmiĢtir.
Şekil 2.8. PD kontrollü sistemin blok diyagramı
15
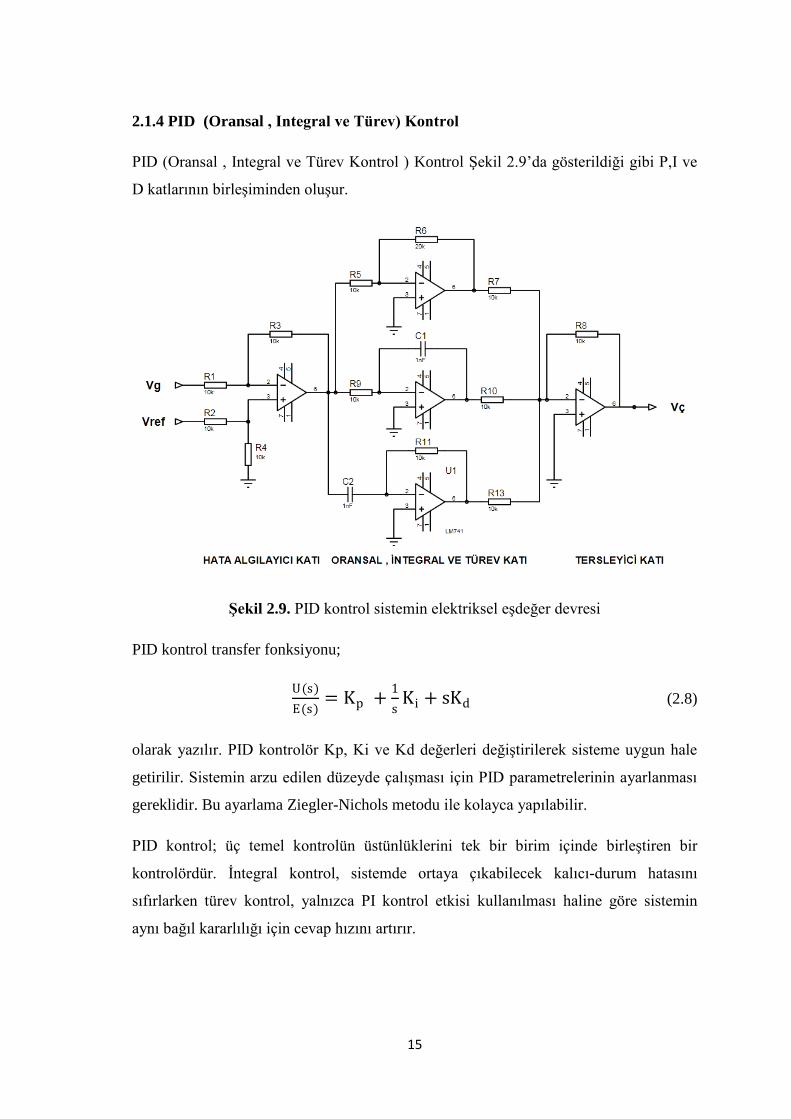
2.1.4 PID (Oransal , Integral ve Türev) Kontrol
PID (Oransal , Integral ve Türev Kontrol ) Kontrol ġekil 2.9‟da gösterildiği gibi P,I ve
D katlarının birleĢiminden oluĢur.
Şekil 2.9. PID kontrol sistemin elektriksel eĢdeğer devresi
PID kontrol transfer fonksiyonu;
U(s)
E(s)= Kp +
1
sKi + sKd (2.8)
olarak yazılır. PID kontrolör Kp, Ki ve Kd değerleri değiĢtirilerek sisteme uygun hale
getirilir. Sistemin arzu edilen düzeyde çalıĢması için PID parametrelerinin ayarlanması
gereklidir. Bu ayarlama Ziegler-Nichols metodu ile kolayca yapılabilir.
PID kontrol; üç temel kontrolün üstünlüklerini tek bir birim içinde birleĢtiren bir
kontrolördür. Ġntegral kontrol, sistemde ortaya çıkabilecek kalıcı-durum hatasını
sıfırlarken türev kontrol, yalnızca PI kontrol etkisi kullanılması haline göre sistemin
aynı bağıl kararlılığı için cevap hızını artırır.
16
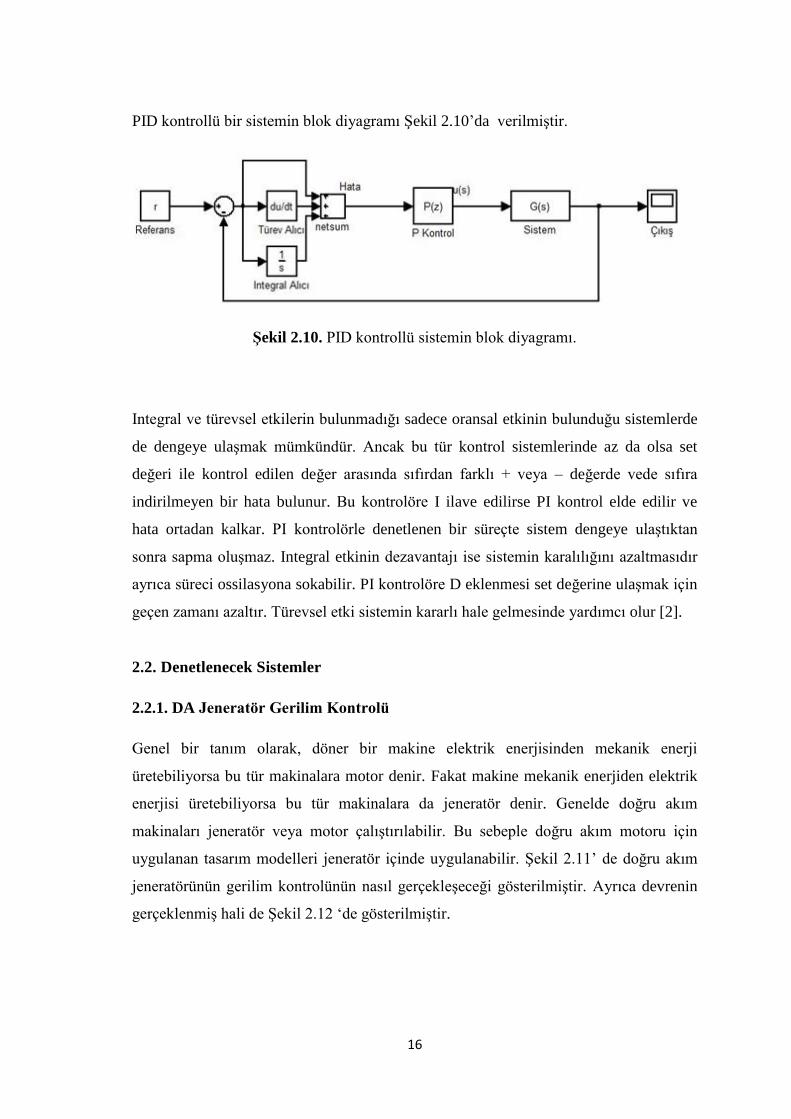
PID kontrollü bir sistemin blok diyagramı ġekil 2.10‟da verilmiĢtir.
Şekil 2.10. PID kontrollü sistemin blok diyagramı.
Integral ve türevsel etkilerin bulunmadığı sadece oransal etkinin bulunduğu sistemlerde
de dengeye ulaĢmak mümkündür. Ancak bu tür kontrol sistemlerinde az da olsa set
değeri ile kontrol edilen değer arasında sıfırdan farklı + veya – değerde vede sıfıra
indirilmeyen bir hata bulunur. Bu kontrolöre I ilave edilirse PI kontrol elde edilir ve
hata ortadan kalkar. PI kontrolörle denetlenen bir süreçte sistem dengeye ulaĢtıktan
sonra sapma oluĢmaz. Integral etkinin dezavantajı ise sistemin karalılığını azaltmasıdır
ayrıca süreci ossilasyona sokabilir. PI kontrolöre D eklenmesi set değerine ulaĢmak için
geçen zamanı azaltır. Türevsel etki sistemin kararlı hale gelmesinde yardımcı olur [2].
2.2. Denetlenecek Sistemler
2.2.1. DA Jeneratör Gerilim Kontrolü
Genel bir tanım olarak, döner bir makine elektrik enerjisinden mekanik enerji
üretebiliyorsa bu tür makinalara motor denir. Fakat makine mekanik enerjiden elektrik
enerjisi üretebiliyorsa bu tür makinalara da jeneratör denir. Genelde doğru akım
makinaları jeneratör veya motor çalıĢtırılabilir. Bu sebeple doğru akım motoru için
uygulanan tasarım modelleri jeneratör içinde uygulanabilir. ġekil 2.11‟ de doğru akım
jeneratörünün gerilim kontrolünün nasıl gerçekleĢeceği gösterilmiĢtir. Ayrıca devrenin
gerçeklenmiĢ hali de ġekil 2.12 „de gösterilmiĢtir.
17
Şekil 2.11. DA Jeneratör Gerilim Kontrolü
Şekil 2.12. DA Jeneratör Gerilim Kontrolü Üstten Görünüm
DA makinalarında stator içindeki kutup sargıları sayesinde tek yönlü bir akı oluĢturulur.
Stator kutup sargılarının faydalarından biride kutup sargılarından akan akımı
değiĢtirerek oluĢan manyetik akıyı değiĢtirilir. Bu sayede de DA motorunun hızı ile DA
jeneratörünün ürettiği gerilimi kontrol edilebilir.
Endüstride üretilen küçük güçlü DA motor ve DA jeneratörler aynı türdendirler. Bu
sayede çoğunlukla bir DA motor DA jeneratör olarak çalıĢtırılabilirken aynı zamanda
DA jeneratör de DA motor olarak çalıĢtırılabilir.
18
2.2.2. Sıcaklık Kontrolü
Sıcaklık kontrollerine ortam sıcaklığının istenilen sıcaklık aralığında tutulması gereken
yerlerde ihtiyaç vardır. Sıcaklık kontrolü hayatın her safhasında ihtiyaç duyulan bir
gereksinim olmakla beraber; üretim yapılan yerlerde, fabrikalarda özellikle ,yanıcı
,patlayıcı maddelerin, tıbbi malzemelerin,gıda malzemelerinin üretildiği yada muhafaza
edildiği yerlerle bu ihtiyaç hayati seviyelere çıkmaktadır. Sıcaklık kontrolünün
yapılacağı ortamın sıcaklığı belli bir aralıkta tutulması gerekir. Bu sıcaklık bazen geniĢ
bir aralıkta olurken bazen de çok küçük bir aralık yada kesin bir değerde olabilir. Bu
sebeple sıcaklık aralığı daraldıkça kontrolün hasasiyetinin artması gerekir.
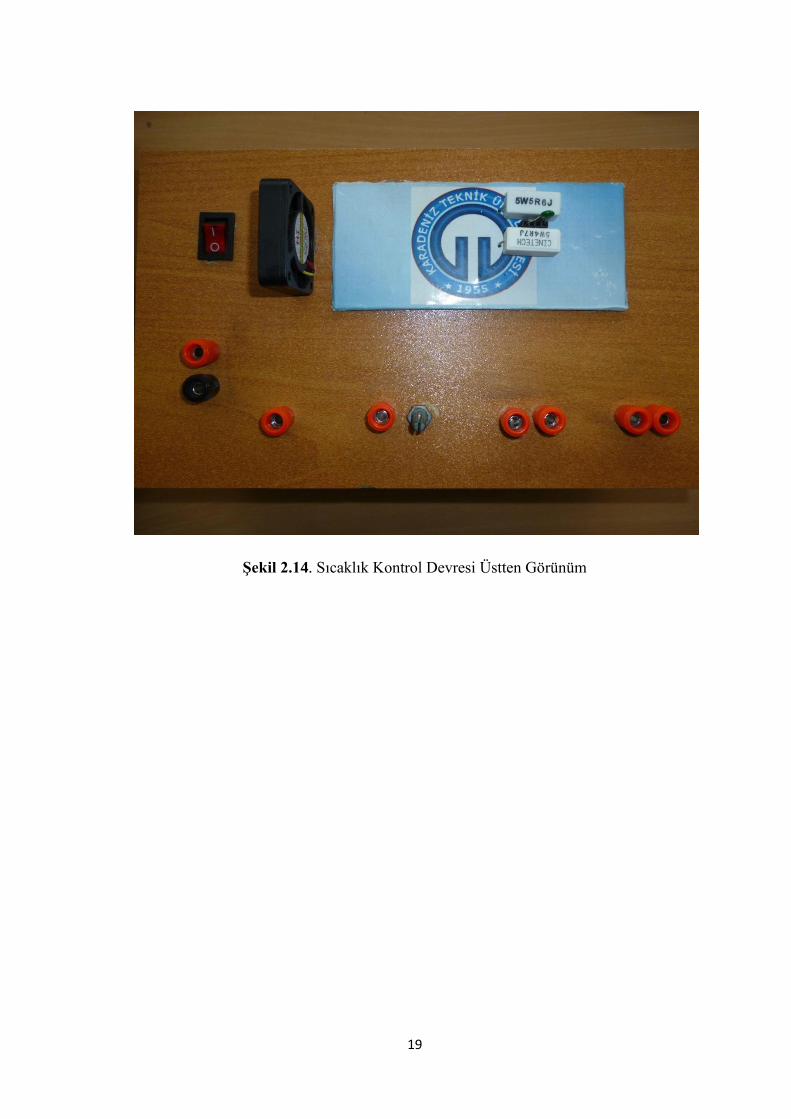
ġekil 2.13‟de sıcaklık kontrolünün nasıl gerçekleĢtrildiği verilmiĢtir. Bu devrede cam
bir fanus taĢ dirençle ısıtılarak ortam sıcaklığı belli bir değerde tutlmaya çalıĢılmıĢtır.
TaĢ dirence uygulanan gerilim ile taĢ direnç ısıtılmıĢ ve ortam sıcaklığı PTC, NTC ve
Termokuplor gibi sıcaklık algılayıcılarla ölçülmüĢtür. Ölçüm sonucu geri besleme ile
referans değerle karĢılaĢtırılmıĢ ve hata değeri bulunmuĢtur. Bu hata değeri PID
kontrolöre verilmiĢ taĢ dirence uygulanan gerilim seviyesi değiĢtirilerek ve ortam
sıcaklığı istenilen seviyeye çekilmeye çalıĢılmıĢtır. Ayrıca devrenin gerçeklenmiĢ hali
de ġekil 2.14 „de gösterilmiĢtir.
Şekil 2.13. Sıcaklık Kontrol Devresi
19
Şekil 2.14. Sıcaklık Kontrol Devresi Üstten Görünüm

20
3. Tasarım
Burada önerilen modüler yöntemde deney seti bir test yatağına sahip ve diğer tüm araç-
gereç ve cihazlar mobil olarak bu test yatağına yerleĢtirilmektedir. Test yatağının
tasarımı farklı modüllerin birleĢtirilmesine uygun yapılmıĢ ve aĢağıda sıralanan temel
modüller bu test yatağına monte edilerek kullanılmaktadır.
Kontrol Sistemleri Modüler Deney Seti Ana Modülleri:
Güç kaynağı modülleri (DC ve AC)
ĠĢaret üretici modüller (sinyal jeneratörleri)
Kontrol Modülleri
Analog denetleyici oluĢturma modülleri
P (Oransal)
PI (Oransal + integral)
PD (Oransal + türev)
PID (Oransal + integral + türev)
Denetlenen sistem modülleri
DA jeneratörü
Sıcaklık kontrolü
Ölçme modülleri
Multimetre
Sıcaklık algılayıcı
Osiloskop
Diğer yardımcı malzeme ve gereçler
OPAMP lar
Potansiyometreler
Dirençler
Kapasitörler
3.1. Maliyet ve Malzeme Analizi
Projede kullanılan malzemeler Çizelge 3.1‟de gösterilmiĢtir. Tasarlanan deney setinde
yukarıda belirtilen denetlenen sistem modüllerine ek olarak; DA motoru, Ters sarkaç,
Kol dengeleme, Hedef vurma ve Konum ayarlama modülleri vardı. Fakat Proje için
ayrılan ödenek yetersizliği ,istenilen malzeme ile temin adilen malzemeler arasındaki
tutarsızlıklar ve malzemelerin zamanında temin edilememesi sebebiyle bu modüller
tamamlanamamıĢtır. Örneğin konum algılama modülü; gerekli olan step motor ve
sürücünün zamanında temin edilemesi, DA motoru; hız kontrolü için gerekli olan
takojeneratörün ödenek yetersizliği sebebiyle deney setine eklenememiĢtir. Ayrıca
TÜBĠTAK‟ın tut elimden projesi kapsamında desteklenen projeye vaat edilen ödeneğin
verilmemesi projeyi kısıtlamıĢtır.

21
Çizelge 3.1: Malzeme Listesi
Sıra
No Malzeme Adı Teknik Özellik Adet
Birim
Fiyatı
(TL)
Toplam
Fiyat
1 DA MOTOR 12 volt dc 120 devir/dakika 60Ncm
moment 4 5 TL 20 TL
2 DA JENERATÖR 12 volt dc 120 devir/dakika 60Ncm
moment 4 5 TL 20 TL
3 DC KAYNAK SĠMETRĠK 0-3 Amper 0-30 Volt 1 310,7 TL 310,7 TL
4 AC KAYNAK(VARYAK) 220Volt 10Amper 1 127 TL 127 TL
5 SĠNYAL JENERATÖRÜ LM348 4 1,40 TL 5,6 TL
6 NTC -55 +100 C' 10 0,74 TL 7,4 TL
7 PTC -55 +100 C' 10 1 TL 10 TL
8 DĠRENÇ 100Ω 220Ω 560Ω 2.2KΩ 3.3KΩ
10KΩ 50 0.1 TL 5 TL
9 KAPASĠTE 10pF 22pF 10µF 20µF 20 0.6 TL 12 TL
10 TAġDĠRENÇ 560R 5W 20 0,25 TL 5 TL
11 TRAFO 2X12V 1,2W KAPALI TRAFO 2 5,87 TL 11,74 TL
12 MULTĠMETRE AC 220V DC 200V DC 10 A 1 33,90 TL 33,90 TL
13 FAN 12V-DC 80X80X25mm 2 5.46TL 10,92 TL
14 PERTANAX 20X20cm 10 10 TL 100 TL
15 OPAMP LM741 12 0.2 TL 2,4 TL
16 OPAMP LM2907 2 15 TL 30 TL
17 PERHĠDROL 5LT %30 ORANINDA 1 15 TL 15 TL
18 BAKIR LEVHA Epoxy YEġĠL KALĠTELĠ
100X100cm 2 191,3 TL 383 TL
19 BASKILIDEVRE KAĞIDI 20X20cm pnp 10 0,5 TL 5 TL

22
3.2. Deney Seti Tasarımı
Deney seti tasarımı ġekil 3.1‟de verilmiĢtir.
Şekil 3.1. Deney Setinin Tasarımı
23
3.3. Deney Setinin Teknik Çizimi
Deney seti teknik çizimi ġekil 3.2‟de verilmiĢtir. Ayrıca devrenin gerçeklenmiĢ hali de
ġekil 3.3 „de gösterilmiĢtir.
Şekil 3.2. Teknik Çizim

24
Şekil 3.3. Deney Seti Genel Görünümü
3.4. Deney Seti Modüllerinin Tanıtımı
3.4.1 Kaynak Modülü
Kaynak modülünde simetrik güç kaynağı ve iĢaret kaynağı üniteleri bulunmaktadır.
Deney seti üzerinde yapılacak olan deneyle ilgili ihtiyaça göre bu üniteleri seçip test
yatağı üzerine yerleĢtirilecektir.
3.4.1.1 Simetrik Güç Kaynağı
Simetrik güç kaynağı devre Ģeması ġekil 3.4‟te verilmiĢtir. ġebeke gerilimi
transformatör yardımıyla 2 kol olarak 15 volt seviyesine düĢürülüyor. 4 adet 1N4001
devrede köprü diyot görevindedir. Transformatörün çıkıĢı AC gerilim olduğundan,
köprü diyotlar sayesinde DC gerilime doğrultulmaktadır. Bu elde edilen DC gerilim tam
olarak doğrusal değildir. Buradaki dalgalanma yok denilecek kadar az bir seviyeye
düĢürmek için C1 ve C2 kondansatörleri kullanılmıĢtır. ÇıkıĢ katında istenilen +12 ve -
12 volt gerilimi elde etmek için C3 ve C4 kondansatörleri R1 ve R2 dirençleri üzerinden
Ģarj edilmektedir.Devrenin gerçeklenen kutu hali ġekil 3.5‟de gösteirlmiĢtir.

25
Şekil 3.4. Simetrik Güç Kaynağı Devresi
Şekil 3.5 Simetrik Güç Kaynağı Devresi Üstten Görünümü

26
3.4.1.2 İşaret Kaynağı
Kullanılan iĢaret kaynağı devresi ġekil 3.6‟da verilmiĢtir. Bu devreyi daha optimal bir
Ģekilde tasarlayabilmek için LM348 entegresi kullanılmıĢtır. LM348 yapı itibariyle 4
adet op-amp içerir. LM348 entegresinin iç yapısı ġekil 3.7‟da gösterilmiĢtir.
Şekil 3.6. LM348 Ġç Yapısı
Şekil 3.7. ĠĢaret Üreteci Devresi
ĠĢaret üreteci devresinin gerçeklenmiĢ hali ġekil 3.8 „de gösterilmiĢtir.

27
Şekil 3.8. ĠĢaret Üreteci Devresi Üstten Görünüm

28
3.4.2 Kontrol Modülü
Şekil 3.9. Kontrol modülü tasarımı
29
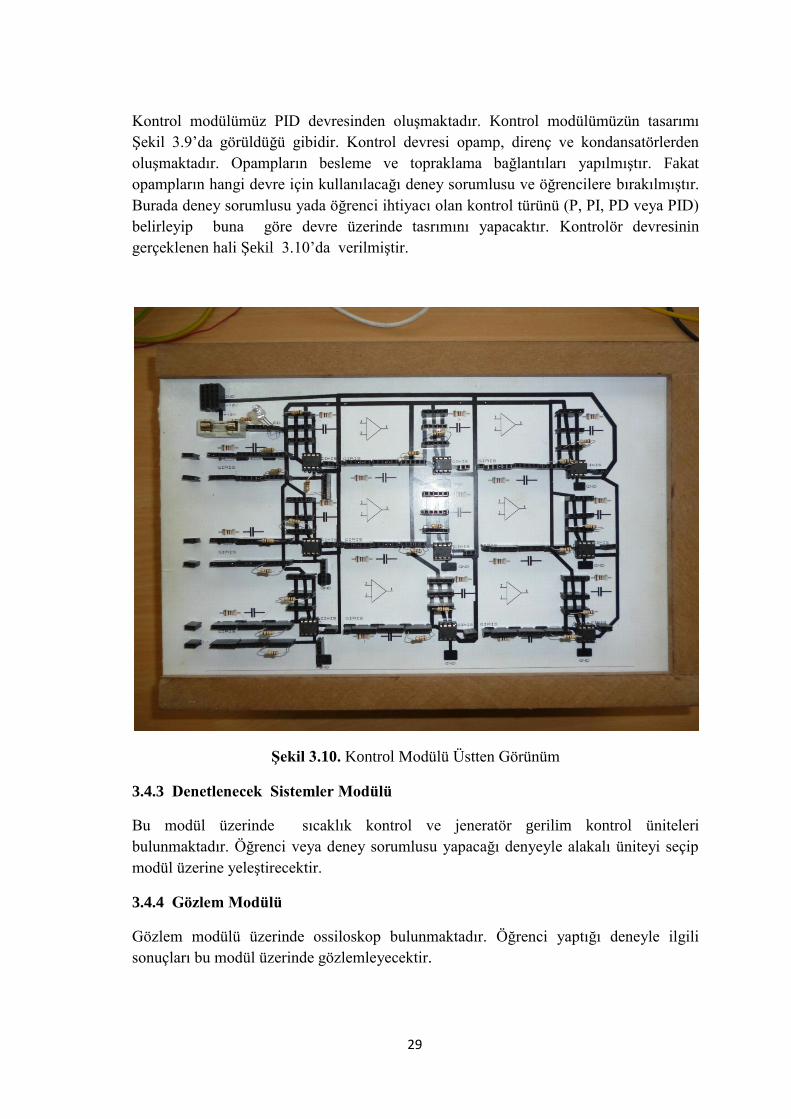
Kontrol modülümüz PID devresinden oluĢmaktadır. Kontrol modülümüzün tasarımı
ġekil 3.9‟da görüldüğü gibidir. Kontrol devresi opamp, direnç ve kondansatörlerden
oluĢmaktadır. Opampların besleme ve topraklama bağlantıları yapılmıĢtır. Fakat
opampların hangi devre için kullanılacağı deney sorumlusu ve öğrencilere bırakılmıĢtır.
Burada deney sorumlusu yada öğrenci ihtiyacı olan kontrol türünü (P, PI, PD veya PID)
belirleyip buna göre devre üzerinde tasrımını yapacaktır. Kontrolör devresinin
gerçeklenen hali ġekil 3.10‟da verilmiĢtir.
Şekil 3.10. Kontrol Modülü Üstten Görünüm
3.4.3 Denetlenecek Sistemler Modülü
Bu modül üzerinde sıcaklık kontrol ve jeneratör gerilim kontrol üniteleri
bulunmaktadır. Öğrenci veya deney sorumlusu yapacağı denyeyle alakalı üniteyi seçip
modül üzerine yeleĢtirecektir.
3.4.4 Gözlem Modülü
Gözlem modülü üzerinde ossiloskop bulunmaktadır. Öğrenci yaptığı deneyle ilgili
sonuçları bu modül üzerinde gözlemleyecektir.

30
4. Deneysel Çalışmalar ve Simülasyonlar
4.1. Deneysel Çalışmalar
4.1.1. DA Jenerator Gerilim Kontrolü
DA jeneratörün geriliminin nasıl kontrol edildiğine dair devre ġekil 4.1‟de
gösterilmektedir. PID kontrolör devresine verilcek referans gerilimi jeneratörün o anki
ürettiği da gerilimle karĢılaĢtırılarak uygun PID parametreleriyle çıkıĢa yani transistörü
tetikleyecek ( 𝑉𝐵𝐸 = 0,7 𝑉 ) eĢik gerilimine ulaĢılıp ulaĢılmadığına gore kontrol
yapılacaktır. Tetikleme seviyesi 0,7 voltun üzerindeyse jeneratör gerilim üretecek ve
karĢılaĢtırıcı vasıtasıyla referans geirlimine gore geri beslemeli bir kontrol süreci
oluĢturulacaktır.
Şekil 4.1. DA Jeneratör Gerili Kontrolü Devresi
Yapılan deneysel çalıĢmalar sonucunda devrenin çeĢitli referans değerlerinde uygun
çıkıĢ gerilimi ürettiği gözlemlenmiĢtir.

31
4.1.2. Sıcaklık Kontrolü
Deney sistemini çalıĢtırmak için kutunun sol tarafında bulunan +15 volt besleme
gerilimi ile beslenir. Deneyde kullanacağınız algılayıcıyı (PTC, NTC) taktından sonra
besleme gerilimini yapılır. Referans olarak alacağınız gerilimi ve buna karĢılık gelen
sıcaklığı tabloda verilen kısımdan bulunur. Daha sonra bu referans gerilimini
kontrolör devresinde opampın bir giriĢine uygulanır. Kontrolör devresindeki opampın
diğer ucuna algılayıcının ucundaki direncin yani sıcaklığın kaç olmasını istiyorsak
tablodan bakıp bu değere karĢılık düĢen gerilimi uygulanacaktır. Burada amacımız
kullandığımız algılayıcının sıcaklık değiĢimini inceleyip buna göre transistorü
tetiklemektir. Deney devremizde kullandığımız taĢ dirençler yüksek akım çektiği için
(0.3-0.5) bu akım değerlerini verecek kaynaklar kullanılmalı ve akım sınırlandırma
ayarlarına dikkat edilmelidir. Yapılan iĢlemler küçük gerilim ve akım değerlerinde
kontrolünde gerçekleĢtiği için ölçümlerde hassas ölçüm yapılmalıdır. Algılayıcaların
bir ucu dıĢarıdan ayarlanabilecek Ģekilde potansiyometre ile kutunun dıĢına aktarılmıĢtır
ve yine üzerlerine düĢen gerilimi ve akımı ölçmek için dıĢarıya pinlerle aktarılmıĢtır.
Devrede kullanılan fan küçük , sürekli mıknatıslı doğru akım motoru olup beslemesi
devre içinden direk besleme gerilimi olan +15 V alınmıĢtır. Kullanılan taĢ dirençlerin
değerleri kΩ mertebesindedir ve birbirine seri bağlanmıĢtır.TaĢ dirençlerin ve
algılayıcıların bulunduğu kısım pertanax üzerine lehimlenmiĢtir.Buradaki amaç
devreden çekilen akımı sınırlandırmaktır. Sınırlama sebebi yüksek çekilen akımının
entegteler üzerindeki hasarı önlemektir. Devrede transistör olarak 10A akıma
dayanabilecek güç transistor ü kullanılmıĢtır. Transistörün baz ucu tetiklemesini kutu
dıĢana bırakılan tetikleme ucundan almaktadır. Bu kısımda tetikleme olabilmesi için
transistor ün aĢma gerilimi olan yaklaĢık 0.7 V „un üstüne çıkılması yerlidir.
Transistörün Emitör ucundan taĢ direnci ısıtmak için çıkıĢ alınmıĢtır ardındaki bağlantı
toprağa bağlanmıĢtır ve kolektör ucuna besleme gerilim bağlanmıĢtır. Devrenin ana
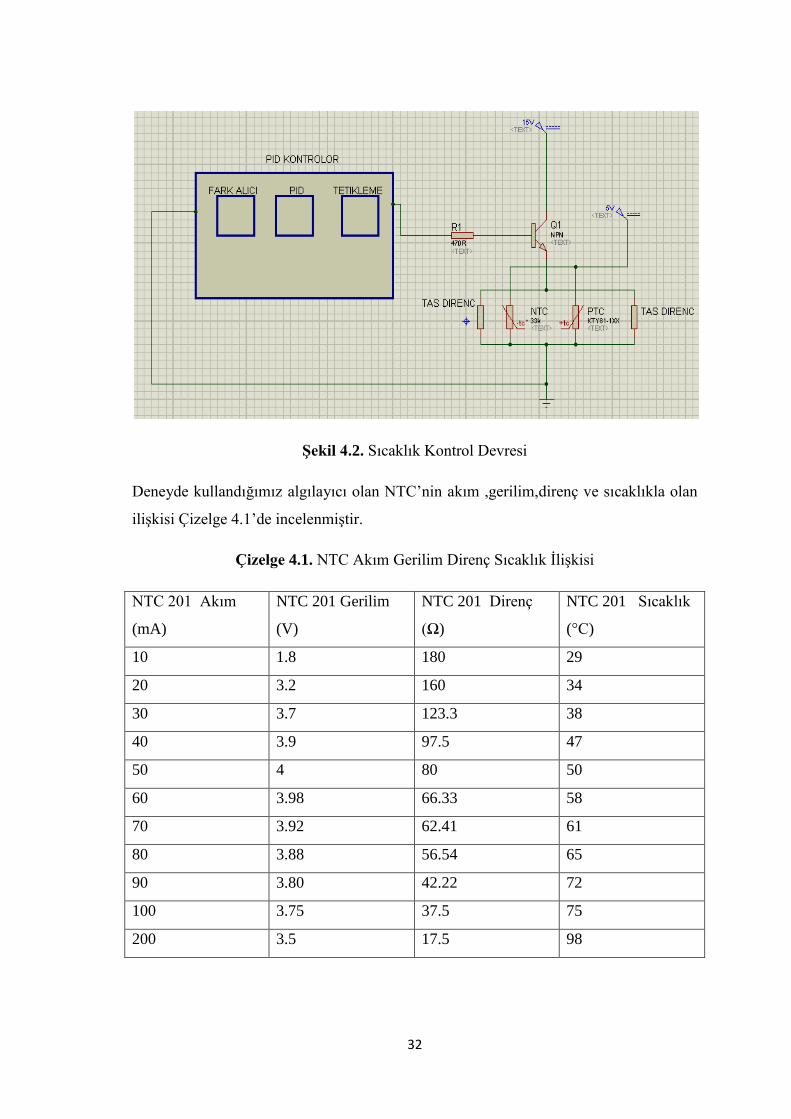
yapısı ġekil 4.2‟de verilmiĢtir.
32
Şekil 4.2. Sıcaklık Kontrol Devresi
Deneyde kullandığımız algılayıcı olan NTC‟nin akım ,gerilim,direnç ve sıcaklıkla olan
iliĢkisi Çizelge 4.1‟de incelenmiĢtir.
Çizelge 4.1. NTC Akım Gerilim Direnç Sıcaklık ĠliĢkisi
NTC 201 Akım
(mA)
NTC 201 Gerilim
(V)
NTC 201 Direnç
(Ω)
NTC 201 Sıcaklık
(°C)
10 1.8 180 29
20 3.2 160 34
30 3.7 123.3 38
40 3.9 97.5 47
50 4 80 50
60 3.98 66.33 58
70 3.92 62.41 61
80 3.88 56.54 65
90 3.80 42.22 72
100 3.75 37.5 75
200 3.5 17.5 98

33
4.2. Simulasyonlar
4.2.1. PID ile DA Generator Gerilim Kontrolü Simulasyonu
PID kontolörde oransal kontrolün yükselme zamanını azaltıcı yönde etkisi vardır.
Ayrıca integral denetleyici kullanarak kararlı hal hatası ortadan kaldırabilir ve son
olarak da türev denetimi kullanılarak sistemin istikrarı artırabilir. PID ile geri
beslemenin nasıl yapıldığına dair blok diyagram ġekil 4.3‟te verilmiĢtir.
Şekil 4.3. PID Geri besleme blok diyagramı
Bir DA jeneratörünün gerilim kontrolünün PID ile nasıl yapıldığına dair blok diyagram
ġekil 4.4‟de verilmiĢtir. Sisteme referans olarak bir giriĢ verildiği zaman PID
denetleyici ile DA generatorünün ürettiği gerilim değeri kontrol edilir.
Şekil 4.4. DA Jeneratör blok diyagramı
PID kontrolörde oransal kontrolün yükselme zamanını azaltıcı yönde etkisi vardır.
Ayrıca integral denetleyici kullanarak kararlı hal hatası ortadan kaldırabilir ve son
olarak da türev denetimi kullanılarak sistemin kararlılığı artırabilir.

34
Bir DA jeneratörün elektriksel eĢdeğeri ġekil 4.5‟de verilmiĢtir. DA generator iki adet
da motorun rotor milinin birleĢtirilmesiyle meydana gelmiĢtir. GiriĢ tarafında bulunan
motora enerji verilmesiyle motorun ürettiği mekanik güç çıkıĢ tarafında bulunan
motorun milini döndürür. Dönen mille birlikte oluĢan indiksiyon akımı çıkıĢta bir
gerilim elde etmemizi sağlar.
Şekil 4.5. DA Jenerator eĢdeğer devresi
DA Jeneratöre ait parametreler Ģu Ģekildedir.
Rotor eylemsizlik momenti (J) = 0.01 kg.𝑚2/𝑠2
Mekanik sistemin sönüm oranı (b) = 0.1 N.m.s
Elektromotor kuvvet sabiti (K=Ke=Kt) = 0.01 N.m/Amp
Rezistans (R) = 1 ohm
Ġndüktans (L) = 0.5 H
Rotor ve milin sert olmadığı kabul edilir
DA jeneratörün dinamik eĢitliği ve açık döngü transfer fonksiyonu aĢağıdaki gibidir.
S(Js+b)Ɵ(s)=KI(s) (4.1)
(Ls + R)I(s) = V(s) – Ks Ɵ(s) (4.2)
G(s) = Ɵ (s)
𝑉(𝑠) =
𝐾
𝐽𝑠+𝑏 + 𝐿𝑠+𝑅 + 𝐾2
𝑟𝑎𝑑 /𝑠𝑒𝑐
𝑉 (4.3)
ġimdi bir PID denetleyici tasarlayalım ve sisteme dahil edelim.
35
J = 2; % Rotor eylemsizlik momenti J=0.01 kg.𝑚2/𝑠2
b = 0.5; % Mekanik sistemin sönüm oranı b=0.5 N.m.s
K = 0.1; % Elektromotor kuvvet sabiti K=0.01 N.m/Amp
R = 1; % Rezistans R=1 ohm
L = 1; % İndüktans L=1 H
pay=K; % G(s) fonksiyonu payı
payda=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; % G(s) paydası
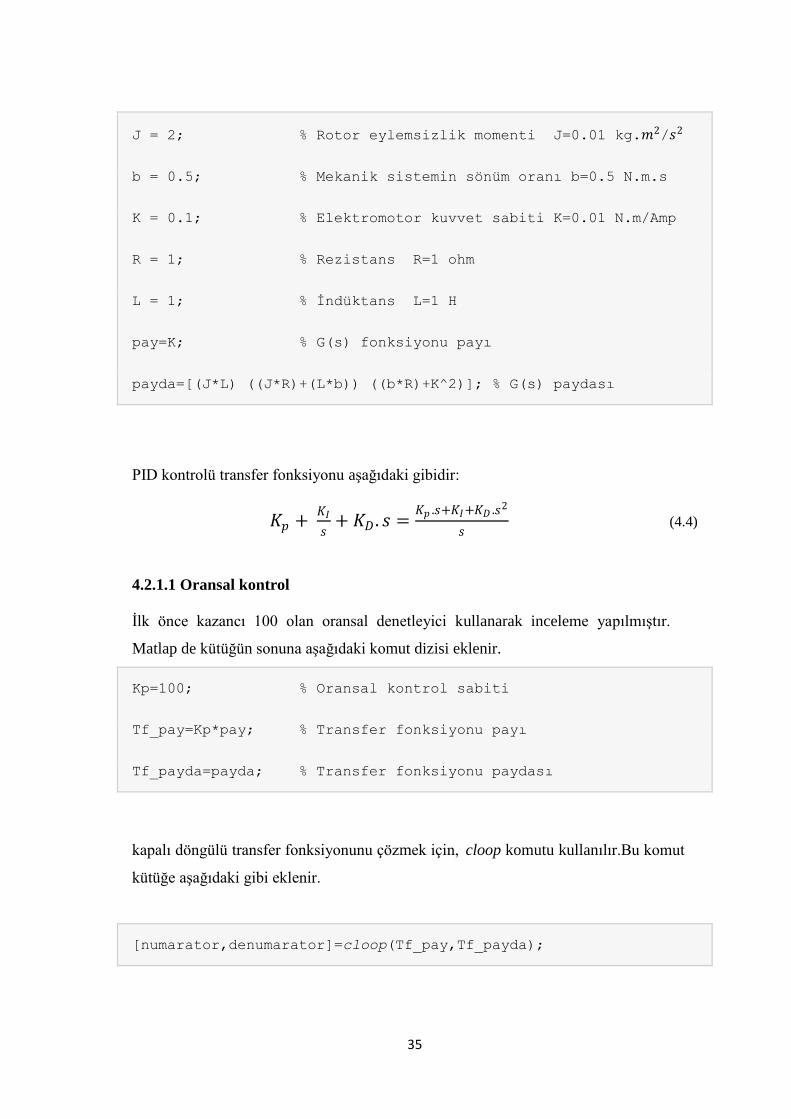
PID kontrolü transfer fonksiyonu aĢağıdaki gibidir:
𝐾𝑝 + 𝐾𝐼
𝑠+ 𝐾𝐷 . 𝑠 =
𝐾𝑝 .𝑠+𝐾𝐼+𝐾𝐷 .𝑠2
𝑠 (4.4)
4.2.1.1 Oransal kontrol
Ġlk önce kazancı 100 olan oransal denetleyici kullanarak inceleme yapılmıĢtır.
Matlap de kütüğün sonuna aĢağıdaki komut dizisi eklenir.
Kp=100; % Oransal kontrol sabiti
Tf_pay=Kp*pay; % Transfer fonksiyonu payı
Tf_payda=payda; % Transfer fonksiyonu paydası
kapalı döngülü transfer fonksiyonunu çözmek için, cloop komutu kullanılır.Bu komut
kütüğe aĢağıdaki gibi eklenir.
[numarator,denumarator]=cloop(Tf_pay,Tf_payda);
36
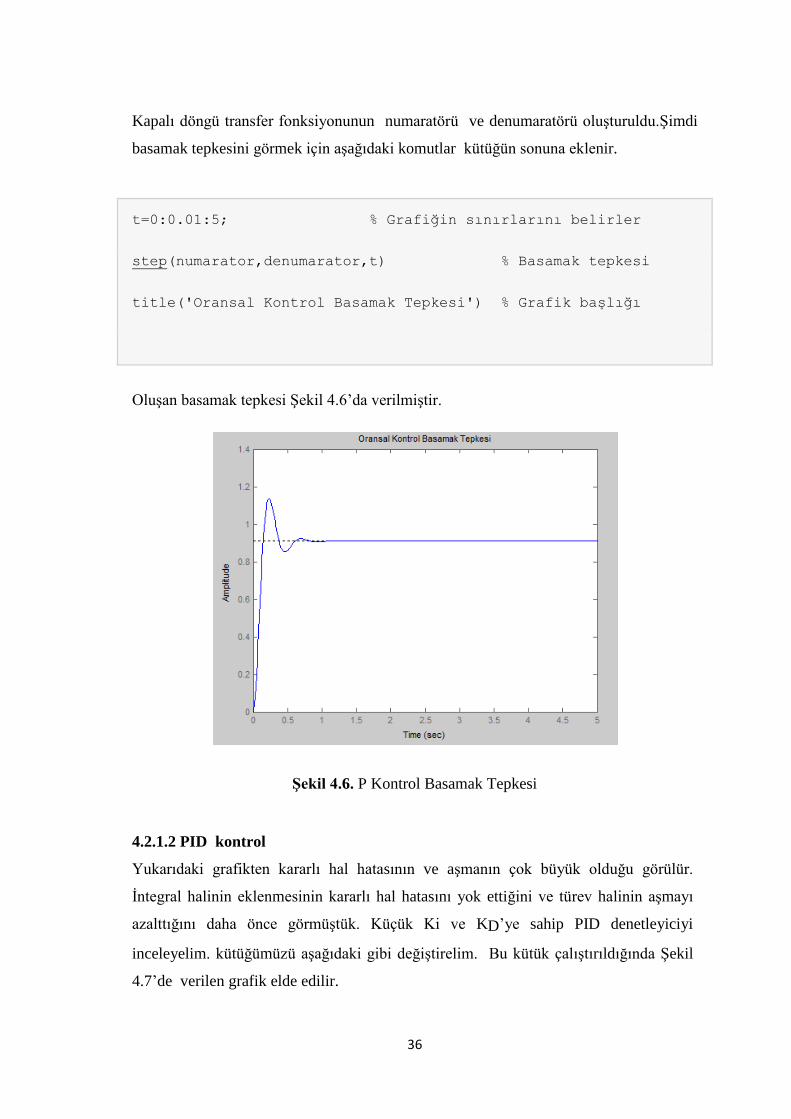
Kapalı döngü transfer fonksiyonunun numaratörü ve denumaratörü oluĢturuldu.ġimdi
basamak tepkesini görmek için aĢağıdaki komutlar kütüğün sonuna eklenir.
t=0:0.01:5; % Grafiğin sınırlarını belirler
step(numarator,denumarator,t) % Basamak tepkesi
title('Oransal Kontrol Basamak Tepkesi') % Grafik başlığı
OluĢan basamak tepkesi ġekil 4.6‟da verilmiĢtir.
Şekil 4.6. P Kontrol Basamak Tepkesi
4.2.1.2 PID kontrol
Yukarıdaki grafikten kararlı hal hatasının ve aĢmanın çok büyük olduğu görülür.
Ġntegral halinin eklenmesinin kararlı hal hatasını yok ettiğini ve türev halinin aĢmayı
azalttığını daha önce görmüĢtük. Küçük Ki ve KD‟ye sahip PID denetleyiciyi
inceleyelim. kütüğümüzü aĢağıdaki gibi değiĢtirelim. Bu kütük çalıĢtırıldığında ġekil
4.7‟de verilen grafik elde edilir.
37
J = 2; % Rotor eylemsizlik momenti J=0.01 kg.𝑚2/𝑠2
b = 0.5; % Mekanik sistemin sönüm oranı b=0.5 N.m.s
K = 0.1; % Elektromotor kuvvet sabiti K=0.01 N.m/Amp
R = 1; % Rezistans R=1 ohm
L = 1; % İndüktans L=1 H
pay=K; % G(s) fonksiyonu payı
payda=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)]; % G(s) paydası
Kp=100; % Oransal kontrol sabiti
Ki=1; % Integral kontrol sabiti
Kd=1; % Türevsel kontrol sabiti
kontrol_pay=[Kd, Kp, Ki]; %C(s) fonksiyonu payı
kontrol_payda=[1 0]; %C(s) fonksiyonu paydası
numarator=conv(pay,kontrol_pay);
denumarator=conv(payda,kontrol_payda);
[tf_pay,tf_payda]=cloop(numarator,denumarator); %transfer
%fonksiyonu
step(tf_pay,tf_payda) %basamak tepkesi
title(‘PID Kontrol Kp=100 Ki=1 Kd=1’) %grafik başlığı
38
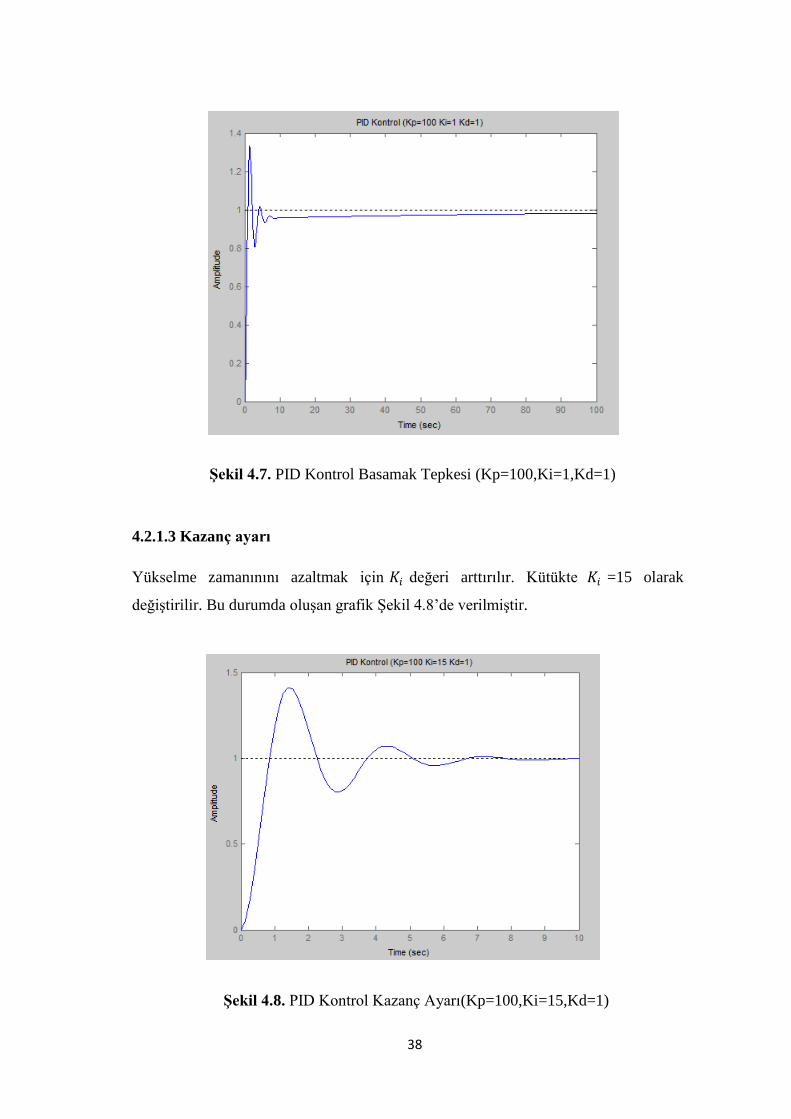
Şekil 4.7. PID Kontrol Basamak Tepkesi (Kp=100,Ki=1,Kd=1)
4.2.1.3 Kazanç ayarı
Yükselme zamanınını azaltmak için 𝐾𝑖 değeri arttırılır. Kütükte 𝐾𝑖 =15 olarak
değiĢtirilir. Bu durumda oluĢan grafik ġekil 4.8‟de verilmiĢtir.
Şekil 4.8. PID Kontrol Kazanç Ayarı(Kp=100,Ki=15,Kd=1)
39
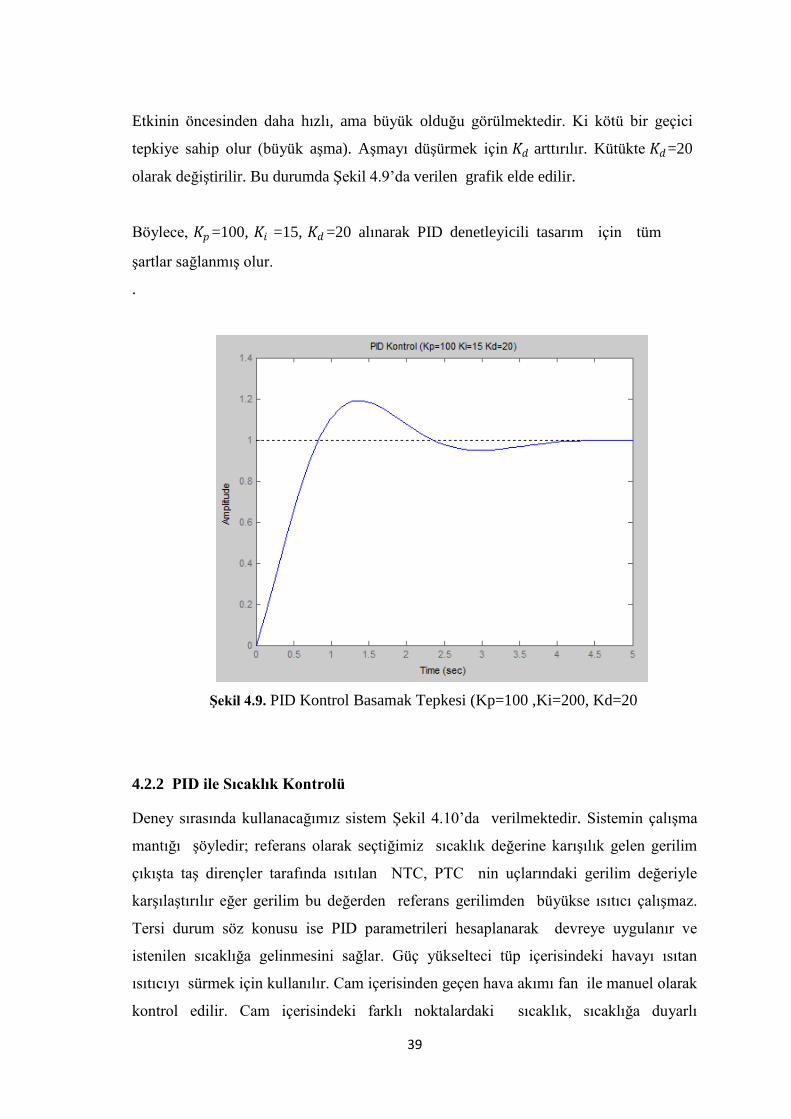
Etkinin öncesinden daha hızlı, ama büyük olduğu görülmektedir. Ki kötü bir geçici
tepkiye sahip olur (büyük aĢma). AĢmayı düĢürmek için 𝐾𝑑 arttırılır. Kütükte 𝐾𝑑=20
olarak değiĢtirilir. Bu durumda ġekil 4.9‟da verilen grafik elde edilir.
Böylece, 𝐾𝑝 =100, 𝐾𝑖 =15, 𝐾𝑑 =20 alınarak PID denetleyicili tasarım için tüm
Ģartlar sağlanmıĢ olur.
.
Şekil 4.9. PID Kontrol Basamak Tepkesi (Kp=100 ,Ki=200, Kd=20
4.2.2 PID ile Sıcaklık Kontrolü
Deney sırasında kullanacağımız sistem ġekil 4.10‟da verilmektedir. Sistemin çalıĢma
mantığı Ģöyledir; referans olarak seçtiğimiz sıcaklık değerine karıĢılık gelen gerilim
çıkıĢta taĢ dirençler tarafında ısıtılan NTC, PTC nin uçlarındaki gerilim değeriyle
karĢılaĢtırılır eğer gerilim bu değerden referans gerilimden büyükse ısıtıcı çalıĢmaz.
Tersi durum söz konusu ise PID parametrileri hesaplanarak devreye uygulanır ve
istenilen sıcaklığa gelinmesini sağlar. Güç yükselteci tüp içerisindeki havayı ısıtan
ısıtıcıyı sürmek için kullanılır. Cam içerisinden geçen hava akımı fan ile manuel olarak
kontrol edilir. Cam içerisindeki farklı noktalardaki sıcaklık, sıcaklığa duyarlı
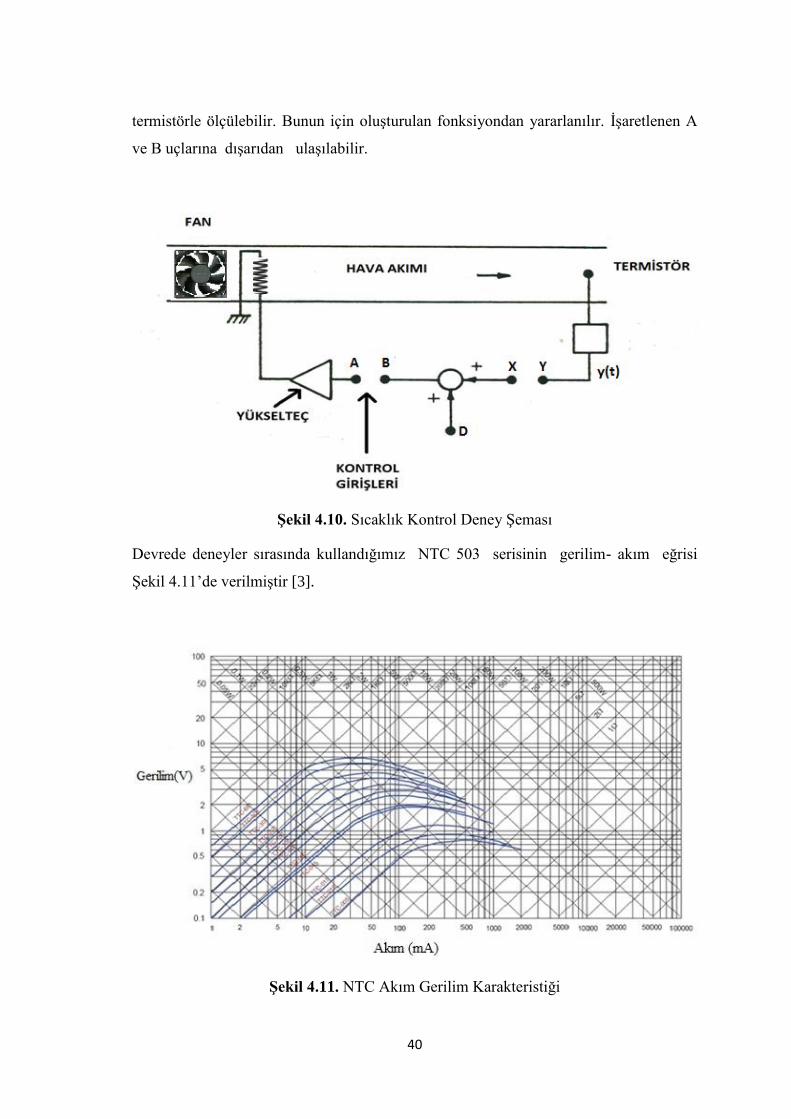
40
termistörle ölçülebilir. Bunun için oluĢturulan fonksiyondan yararlanılır. ĠĢaretlenen A
ve B uçlarına dıĢarıdan ulaĢılabilir.
Şekil 4.10. Sıcaklık Kontrol Deney ġeması
Devrede deneyler sırasında kullandığımız NTC 503 serisinin gerilim- akım eğrisi
ġekil 4.11‟de verilmiĢtir [3].
Şekil 4.11. NTC Akım Gerilim Karakteristiği

41
Simulasyonlarda kullanılacak genel döngü ġekil 4.12‟de verilmiĢtir.
r(t): GiriĢ fonksiyonu
G(s):Transfer fonksiyonu
y(t):ÇıkıĢ fonksiyonudur
q(t):Bozucu etkidir ve dıĢarıdan uygulanabilir.
Şekil 4.12. Sıcaklık Kontrol Sistemi Blok Diyagramı
Deneyin matematiksel analizine geçmeden önce PID kontrol için kullanılan genel ifade
bilinmelidir. Deney transfer fonksiyonumuz laboratuarda inceleme imkanmız olmadığı
için daha önceden benzer deneyi yapan kaynaktan alınmıĢtır [4]. Simulasyonlarda bu
transfer fonksiyonu baz alınarak yapılmıĢtır.
G(s) = T(s)
𝑉(𝑠) (4.5)
T(s): Sıcaklık çıkıĢ fonksiyonu
V(s):GiriĢ gerilim fonksiyonu
Devremizin transfer fonksiyonu aĢağıdaki gibi belirlenmiĢtir ;
106
1495s+1 (4.6)
Ġlk durumda farklı kazanç değerleri için Kp,Kd ve Ki değerleri için sistemin gösterdiği
tepkileri inceleneceki. Sistem giriĢine sinüs,rampa ve basamak giriĢ fonksiyonları
verilerek sistemin gösterdiği tepki incelenecektir.
42
4.2.2.1 Oransal Kontrol
Sisteme P kontrol uygulandığında oluĢan basamak tepkesi ġekil 4.13‟te verilmiĢtir.
Kp=1; % Oransal kontrol sabiti
Ki=1; % Integral kontrol sabiti
Kd=1; % Türevsel kontrol sabiti
pay=106; % G(s) fonksiyonu payı
payda=[1495 1]; % G(s) paydası
kontrol_pay=[Kd, Kp, Ki]; %C(s) fonksiyonu payı
kontrol_payda=[1 0]; %C(s) fonksiyonu paydası
numarator=conv(pay,kontrol_pay);
denumarator=conv(payda,kontrol_payda);
[tf_pay,tf_payda]=cloop(numarator,denumarator); %transfer
%fonksiyonu
step(tf_pay,tf_payda) %basamak tepkesi
title(‘PID Kontrol Kp=1 Ki=0 Kd=0’) %grafik başlığı
43
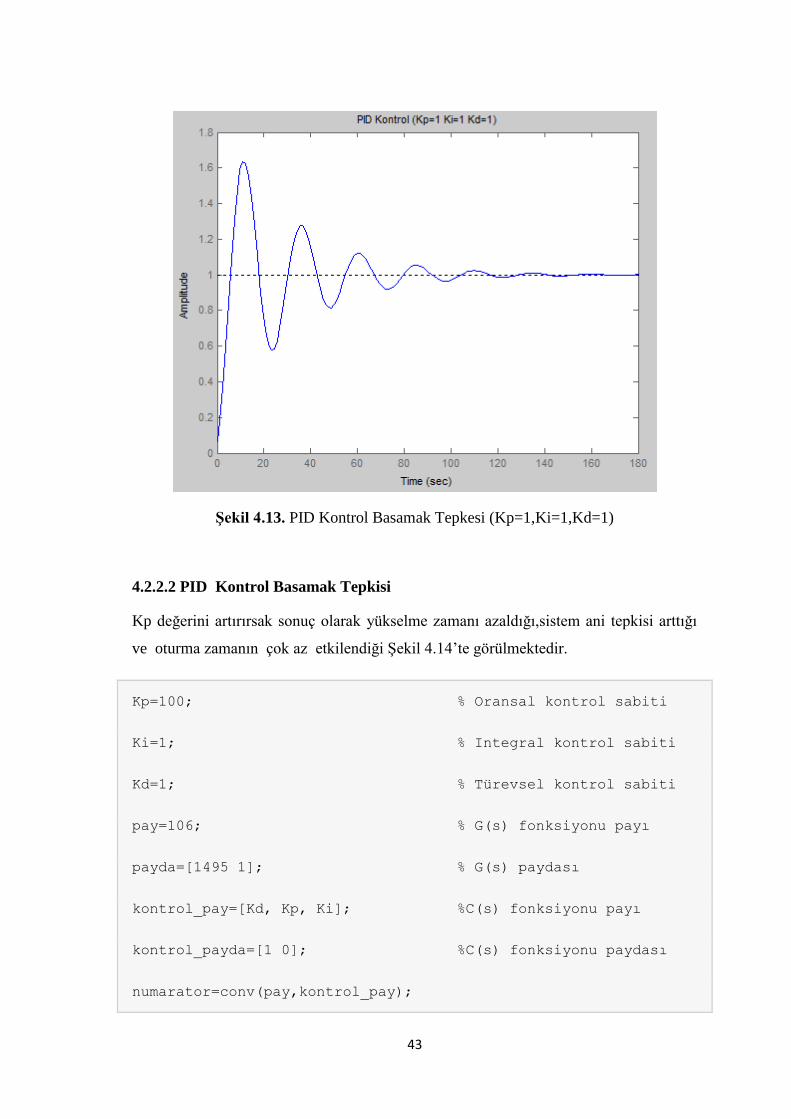
Şekil 4.13. PID Kontrol Basamak Tepkesi (Kp=1,Ki=1,Kd=1)
4.2.2.2 PID Kontrol Basamak Tepkisi
Kp değerini artırırsak sonuç olarak yükselme zamanı azaldığı,sistem ani tepkisi arttığı
ve oturma zamanın çok az etkilendiği ġekil 4.14‟te görülmektedir.
Kp=100; % Oransal kontrol sabiti
Ki=1; % Integral kontrol sabiti
Kd=1; % Türevsel kontrol sabiti
pay=106; % G(s) fonksiyonu payı
payda=[1495 1]; % G(s) paydası
kontrol_pay=[Kd, Kp, Ki]; %C(s) fonksiyonu payı
kontrol_payda=[1 0]; %C(s) fonksiyonu paydası
numarator=conv(pay,kontrol_pay);

44
denumarator=conv(payda,kontrol_payda);
[tf_pay,tf_payda]=cloop(numarator,denumarator); %transfer
%fonksiyonu
step(tf_pay,tf_payda) %basamak tepkesi
title(‘PID Kontrol Kp=1 Ki=1 Kd=0’) %grafik başlığı
Şekil 4.14. PID Kontrol Basamak Tepkisi(Kp=100,Ki=1,Kd=1)
45
4.2.2.3 Kazanç Ayarı
Ki değerini artırlırsa sistem ani tepksinin arttığı,oturma zamanın arttığı ve yükselme
zamanın azaldiğı ġekil 4.15‟te görülmektedir.
Kp=100; % Oransal kontrol sabiti
Ki=7; % Integral kontrol sabiti
Kd=1; % Türevsel kontrol sabiti
pay=106; % G(s) fonksiyonu payı
payda=[1495 1]; % G(s) paydası
kontrol_pay=[Kd, Kp, Ki]; %C(s) fonksiyonu payı
kontrol_payda=[1 0]; %C(s) fonksiyonu paydası
numarator=conv(pay,kontrol_pay);
denumarator=conv(payda,kontrol_payda);
[tf_pay,tf_payda]=cloop(numarator,denumarator); %transfer
%fonksiyonu
step(tf_pay,tf_payda) %basamak tepkesi
title(‘PID Kontrol Kp=1 Ki=0 Kd=0’) %grafik başlığı

46
Şekil 4.15. PID Kontrol Basamak Tepkesi (Kp=100,Ki=7,Kd=1)
Kd değerini artırsak türev alma parametresi artacağından sistem ani tepkisi
azalır,yükselme zamanı çok az etkilenir ,kararlı durum hatası çok az etkilenir,oturma
zamanı ise azalır. Bu durum ġekil 4.16‟da görülmektedir
Kp=100; % Oransal kontrol sabiti
Ki=7; % Integral kontrol sabiti
Kd=2; % Türevsel kontrol sabiti
pay=106; % G(s) fonksiyonu payı
payda=[1495 1]; % G(s) paydası
kontrol_pay=[Kd, Kp, Ki]; %C(s) fonksiyonu payı
kontrol_payda=[1 0]; %C(s) fonksiyonu paydası
numarator=conv(pay,kontrol_pay);

47
denumarator=conv(payda,kontrol_payda);
[tf_pay,tf_payda]=cloop(numarator,denumarator); %transfer
%fonksiyonu
step(tf_pay,tf_payda) %basamak tepkesi
title(‘PID Kontrol Kp=1 Ki=0 Kd=0’) %grafik başlığı
Şekil 4.16. PID Kontrol Basamak Tepkesi (Kp=100, Ki=7, Kd=2)

48
6.Sonuçlar
Bu projede otomatik kontrol sistemleri dersi kapsamında verilen birçok uygulamanın
gerçekte nasıl gerçeklenebileceğine dair birtakım deneyler yapılmıĢtır. Bu deneylerden
ilki DA jeneratörün ürettiği gerilimin nasıl kontrol altına alınabileceğidir. Bu çalıĢmada
kontrol mekanizmamız olan PID „in nasıl çalıĢtığına dair gözlemler yapılmıĢtır.Üretilen
gerilimin hangi parametrelere bağlı olduğu saptanmaya çalıĢılmıĢtır. Uygulamalarda ve
simulasyonda görülen değerlerin uyuĢması deneyin doğru yapıldığının göstergesidir.
Sistemi tasarlarken karĢılaĢtığımız zorluklara gelirsek fırçasız DA motorlarımızın 1
amper gibi yüksek bir değerde akım çekmesinden dolayı tetikleme için gerekli olan
akım değeri sağlanamamıĢtır. Bu yüzden bu motorlar değiĢtirilerek yerine 0.5 amperlik
motorlar kullanılmıĢtır.
Bir diğer deney olan sıcaklık kontrolünde ise kontrol edilen büyüklük sıcaklıktır.Bu tür
bir mekanizmanın örneklerine günlük hayatta sıkça rastlayabiliriz. Örneğin soğuyan bir
odayı ısıtmak için otomatik açılan klima sistemi. Bu sistem sensörler vasıtasıyla
algılama yapmaktadır. Bizim denetlediğimiz sistem de kontrol PID ile sağlanmaktadır.
Sistem PID‟den alınan değerlere göre istenilen sıcaklık düzeyini geri beslemeyle
sağlamaktadır.
Sistemi tasarlarken karĢılaĢtığımız zorluklara gelirsek taĢ dirençlerin yeteri kadar ısı
sağlayamaması üzerine ısıtılacak olan devre elemanları (NTC, PTC) kapalı bir hazne
içine alınmıĢtır. Isı kaybı bu Ģekilde engellenmiĢtir.
7.Yorum ve Değerlendirmeler
7.1 DA Jeneratörü Gerilim Kontrolü Değerlendirme
DA jeneratörü gerilim kontrolü endüstride sıkça karĢılaĢtulaĢtığımız bir süreçtir. Günlük
hayatımızda fazla rastlamasakta endüstride üretilen gerilimin kontrol edilmesi büyük
öenm arz etmektedir. Sürecin kontrol kısmı denetleyiciler (P,PI,PID) ile yapılacaktır.
Devremiz gerilim kontrolünün yapılacağı son derece anlaĢılabilir,kolay kurulumlu
öğrencileri daha çok deney içine dahil eden ve anlamalarını sağlayan bir deney setidir.
Deneyin tekniksel kısmı ,matematiksel analizi ve simulasyonlar kısmı hakkındaki bilgi
ve açıklamalar tezin ilgili kısımlarında açıklanmıĢtır.
49
7.2 Sıcaklık Kontrol Devresi Değerlendirme
Bu çalıĢmadaki amacımız günlük hayatımızda ve endüstride sıkça karĢılaĢtığımız
,zaman zaman çok kritik iĢlevleri olan sıcaklık kontrolünün deneysel yolla incelenmesi
ve laboratuarda kullanılan bir devre tasarlamaktır. Kontrol kısmı denetleyiciler
(P,PI,PID) ile yapılacaktır. Devremiz sıcaklık kontrolünün yapılacağı son derece
anlaĢılabilir,kolay kurulumlu öğrencileri daha çok deney içine dahil eden ve
anlamalarını sağlayan bir deney setidir. Deneyin tekniksel kısmı ,matematiksel analizi
ve simulasyonlar kısmı hakkındaki bilgi ve açıklamalar tezin ilgili kısımlarında
açıklanmıĢtır. Devrede kullandığımız kontrolörün analog olmasından ve istenilen
fiziksel Ģartların sağlanamamasından dolayı sağlık ölçümler alınamasada ,deney
anlaĢılabilir bir niteliktedir. Öğrencilerin deneye gelmeden önce deney föyünü okuyup
,simülasyonlar kısmını matlabta gerçekleĢtirdileri takdirde deney sonucunda ki
anlaĢılabilirlik verimi yüksek olacaktır. Sıcaklık kontolünde küçük akım ,gerilim ve
sıcaklık değerlerinde iĢlemler yapıldığı için sonuçlar net olarak görünmesede
anlaĢılabilir düzeydedir. Kontrolü sağlayan giriĢ gerilimi ve algılayıcılar üzerindeki
değiĢimler hassas olduğundan ölçümler dikkatli yapılmalıdır.
50
Kaynaklar
[1]. D. Çolakoğlu, Süreç Kontrol, Mersin Üniversitesi, 2007
[2]. Ö. Aydın, “Otomatik yönlendirmeli araçlarda yörünge kontrolü”, Fırat Üniversitesi Fen
Bilimleri Enstitüsü
[3]. “NTC Thermistor TTC05 Series Data Sheet”, Thinking Electronic Industrial Co.
Ltd,Taiwan
[4]. E. D. Bolat, K. Erkan, S. Postalcıoğlu, “Microcontroller Based Temperature Control of
Oven Using Different Kinds of Autotuning PID Methods” AI 2005, LNAI 3809, 2005, pp.
1295-1300.

51
EKLER
Ek.1 STANDARTLAR ve KISITLAR FORMU
Tasarım Projesinin hazırlanmasında Standart ve Kısıtlarla ilgili olarak, aĢağıdaki
soruları cevaplayınız.
1. Projenizin tasarım boyutu nedir? Açıklayınız.
Günümüzde okullarda kullanılan deney setleri eğitim açısından kullanılabilirliği
kısıtlıdır .Çünkü bu deney setleri neredeyse tamemen hazır bir Ģekilde kullanıma hazır
halde laboratuarlara gelmektedir.Öğrenciler deney setinde sadece hazır olan birkaç
bağlantı yapılarak deneyi çalıĢtırılmakta deneyin içeriğini anlayamadan ve deneyi
tam olarak kavrayamadan deneyi tamamlamaktadır.Amacımız bu tasarım ile deney
setlerini öğrencinin daha çok deney içine dahil eden ,elektrik kompanantları deney
sırasında gören, hazır devre kurmak değilde tasarla-kur-yap Ģeklinde deney setleri
yapıp deney eğitimlerinin verimlilğini artırmaktır .
2. Projenizde bir mühendislik problemini kendiniz formüle edip, çözdünüz mü?
Projeyı hazırlarken piyasadaki deney setlerınin farklı olarak ,hazır bir deney yapmak
yerine tasarla –kur –yap Ģeklinde , öğrencinin öğrenme yetisini artıracak onları deney
içine dahil edecek bir deney seti yapmaya çalıĢtık.Bunu yaparken kullanacağımız
deney setlerini ayrı ayrı tasarladık ve deney setlerini optimize etmeye basitleĢtirmeye
çalıĢtık.Sonuç olarak deney seti tasarımı özgün olarak hazırlanmıĢtır.
3. Önceki derslerde edindiğiniz hangi bilgi ve becerileri kullandınız?
Projeyi hazirlarken lisans egtimde aldigimiz Introduction kontrol system derslerindeki
denetim sistemlerinden ,elektik makineleri 1 gordugumuz Dc motorlar yapisi ve
calisma ilkeleri ,Measurement in electrical engineer dersi olcu aletlerini secerken
,proje yonetimi dersi projenin gidisatinda yon verirken bize yardimci oldu
4. Kullandığınız veya dikkate aldığınız mühendislik standartları nelerdir?
TS 3619 Elektro teknikte kullanılan ve tanımları – Temel tanımlar
TS 10078 Ev tipi cihazlar ve benzeri elektrik donanımın elektrik besleme sistemlerinde
yol açtığı bozulmalar – bölüm 3 gerilim dalgalanmaları
TS 10078 Ġletkenlerin renkler veya numarlar ile belirlenmesi
TS 3476 Ġletkenlerin renkler veya numarlar ile belirlenmesi
52
TS 2932 Direnç ve kondansöterler için iĢaretleme kodları
TS 7034 Doğru akım potansiyometreleri genel kurallar
TS 1828 Baskılı devreler için terimler ve tarifler
5. Kullandığınız veya dikkate aldığınız gerçekçi kısıtlar nelerdir?
a)Ekonomi
Deney setlerini tasarlarken devreleri en sade ve basit Ģekilde yapmaya maliyeti
düĢürmeye çalıĢtık.Setlerin tasarım kısmında kullanılan devrelerin gerekli
optimasyonları yaparak yapacak olacak ürünümüzün maliyetini aĢağı çekmeye çalıĢtık.
b)Çevre sorunları:
Projenin çevreye direk yada dolaylı olarak bir zararı yoktur .
c)Sürdürülebilirlik:
Deney setlerinin kullanılabilirliği ve devamlı olmasına tasarım aĢamasında dikkat
ettik.Ayrıca sistemde sonradan eklenebilicek kontrol elemanları , yeni deneyler,farklı
uygulamalar için esneklikler bıraktık.
d) Üretilebilirlik:
Proje tasarım aĢamasında hiçbir projeden direk olarak bir unsur alınmamıĢ projenin
yeni bir ürün olmasına dikkat edilmiĢtir. Yapılacak olan ürünün deney eğitimi için
gerekli ihtiyaçlara cevap verecek Ģekilde tasarlanmıĢtır.Ortaya koyulacak ürünün hem
ihtiyaçlara cevap vermesi hemde ekonomik olması sebebiyle deney setlerinin seri
üretilmesi mümkündür.
e) Etik:
Proje konumuz tamamen teknik olduğu için etik bir unsur kullanmadık.
f) Sağlık:
Deney setlerinde insan sağlığına zarar vermeyen hammadden ve plastikten yapılmıĢ
malzemeler seçmeye çalıĢtık ve buna azami ölçüde dikkat ettik.
g) Güvenlik:

53
Deney setlerinin tarsımı kısmında en önemli kıstaslardan biri de Güvenliktir.Tasarım
aĢamasında setleri kullananların karĢılaĢabileceği elektrik çarpmalarına,sızıntı
akımlarına engel olmak için topraklama kısmının üzerinde durduk. Yine setlerin
üzerine koyacağımız uyarı iĢaretleriyle bu hususa öğrencilerin duyarlılığı artırılacaktır.
h) Sosyal ve politik sorunlar:
Tasarım konumuz teknik kısımlardan oluĢmakta ve herhangi bir politik yada sosyal
problem içermemektedir.
54
ÖZGEÇMİŞLER
Gökhan ÖĞÜT
Ağustos 1989 yılında Kocaeli‟nde doğdu.Ġlköğretim ve lise öğrenimini Kocaeli-
Gebze‟de tamamladı.2007 yılında Karadeniz Teknik Üniversitesi Elektrik-Elektronik
Mühendisliği Bölümün‟ü kazandı.Halen aynı bölümde öğrenimine devam etmektedir.

55
Hakkı YILMAZ
Temmuz 1989 yılında Karaman‟da doğdu. Ġlköğretimi ve lise öğrenimini Karaman‟da
tamamladı. 2007 yılında Karadeniz Teknik Üniversitesi Elektrik-Elektronik
Mühendisliği Bölümün‟ü kazandı. Halen aynı bölümde öğrenimine devam etmektedir.

56
Servet KEMANCI
1989 yılında Konya‟da doğdu. Ġlköğretim ve lise öğrenimini Konya‟da tamamladı.2007
yılında Karadeniz Teknik Üniversitesi Elektri-Elektronik Mühendisliği Bölümün‟ü
kazandı.Halen aynı bölümde öğrenimine devam etmektedir.





























