Embed Size (px)
Citation preview

Optimization and Operations Research II
Ricardo [email protected]
Department of Combinatorics and OptimizationFaculty of MathematicsUniversity of Waterloo
Nov 26, 2014
R. Fukasawa (C&O) Opt. and OR II 1 / 26

Shortest path
Given G = (V ,E ) with costs ce > 0 for all e ∈ E , and two vertices s andt, find shortest s − t path.
Recall:
Vertices (circles): {A,B,C,D,E,F,G}
Edges (lines): {A,B}, {B,F}, {A,F},{B,C}, . . .
Path is a sequence of adjacentnon-repeated verticesExample: (A,B,F,G,E) is an A− E path
Cost of path is sum of cost of edgesExample: Path (A,B,F,G,E) has cost 18
R. Fukasawa (C&O) Opt. and OR II 2 / 26

Shortest path
Given G = (V ,E ) with costs ce > 0 for all e ∈ E , and two vertices s andt, find shortest s − t path.
R. Fukasawa (C&O) Opt. and OR II 3 / 26

Shortest path
Given G = (V ,E ) with costs ce > 0 for all e ∈ E , and two vertices s andt, find shortest s − t path.
R. Fukasawa (C&O) Opt. and OR II 3 / 26

Shortest path
Given G = (V ,E ) with costs ce > 0 for all e ∈ E , and two vertices s andt, find shortest s − t path.
One typical optimization problem
Used in Operations Research in many applications (often as asubroutine)
R. Fukasawa (C&O) Opt. and OR II 3 / 26

Application
R. Fukasawa (C&O) Opt. and OR II 4 / 26

Application
We want to have a machine every year from now (year 1) to the end ofyear 6. We want to decide when to keep the old one machine and payincreasing maintenance costs or when to replace it with a new one.Purchase costs at the beginning of each year:
Year1 2 3 4 5 6
Purchase cost 20 19 16 21 18 22Annual maintenance cost for a machine according to age:
Age0 1 2 3 4 5
Repair and maintenance cost 1 3 4 6 7 8How can one determine the best repair policy using the shortest pathproblem?
R. Fukasawa (C&O) Opt. and OR II 4 / 26

Shortest path
Given G = (V ,E ) with costs ce > 0 for all e ∈ E , and initial vertex s, findshortest s − v path for all v ∈ V .Dijkstra’s algorithm: Maintain a set S for which we know the shortests − v path of cost d(v) for all v ∈ S .
1 Let S = {s}, d(s) = 02 For all v /∈ S that are adjacent to some vertex in S do
1 Compute d ′(v) = min{d(u) + cuv : u ∈ S , {u, v} ∈ E}
3 Let w be the vertex with smallest d ′(v).
4 Let S ← S ∪ {w} and d(w) = d ′(w).Also, the shortest s − w path will be the shortest s − u path with wappended (where u was the vertex that determined d ′(w) )
5 If S 6= V , go to step 2.
R. Fukasawa (C&O) Opt. and OR II 5 / 26

Exercise
Apply Dijkstra’s algorithm starting with s
R. Fukasawa (C&O) Opt. and OR II 6 / 26

Exercise
Apply Dijkstra’s algorithm starting with A
R. Fukasawa (C&O) Opt. and OR II 7 / 26

Guaranteeing optimality
Question
Suppose you give me a path that you claim is the shortest possible.If I don’t trust you (or how you implemented Dijkstra’s algorithm), howcan you convince me that you are right (i.e. you found the optimalsolution)?
R. Fukasawa (C&O) Opt. and OR II 8 / 26

Guaranteeing optimality
Question
Suppose you give me a path that you claim is the shortest possible.If I don’t trust you (or how you implemented Dijkstra’s algorithm), howcan you convince me that you are right (i.e. you found the optimalsolution)?
This is in general a hard question to answer without looking throughEVERY single possible solution (or in this instance running Dijkstra’salgorithm myself).
R. Fukasawa (C&O) Opt. and OR II 8 / 26

Guaranteeing optimality
Question
Suppose you give me a path that you claim is the shortest possible.If I don’t trust you (or how you implemented Dijkstra’s algorithm), howcan you convince me that you are right (i.e. you found the optimalsolution)?
This is in general a hard question to answer without looking throughEVERY single possible solution (or in this instance running Dijkstra’salgorithm myself).
Who is the tallest high-school student in this room?
R. Fukasawa (C&O) Opt. and OR II 8 / 26

Guaranteeing optimality
Question
Suppose you give me a path that you claim is the shortest possible.If I don’t trust you (or how you implemented Dijkstra’s algorithm), howcan you convince me that you are right (i.e. you found the optimalsolution)?
This is in general a hard question to answer without looking throughEVERY single possible solution (or in this instance running Dijkstra’salgorithm myself).
Who is the tallest high-school student in this room?What is the tallest tree on earth?
R. Fukasawa (C&O) Opt. and OR II 8 / 26

Tallest tree on earth
369 feet (112m) high
Discovered in 2007 in Humboldt Redwoods State Park,California, USA. Called “Stratosphere Giant”
R. Fukasawa (C&O) Opt. and OR II 9 / 26

Tallest tree on earth
369 feet (112m) high
Discovered in 2007 in Humboldt Redwoods State Park,California, USA. Called “Stratosphere Giant”
R. Fukasawa (C&O) Opt. and OR II 9 / 26
After its short four-year reign as World’s Tallest,two hikers... came across a new stand of trees,taller than anyone had ever seen before. Thetallest of the tall is 379 feet 4 inches (116m), 10feet taller than the Giant. It’s now called “Hyper-ion” (2011)
Extracted from NPR.org

Guaranteeing optimality
Moral of the story
It is much easier to prove that a solution is NOT optimal than to provethat it is.
R. Fukasawa (C&O) Opt. and OR II 10 / 26

Introducing barriers
Suppose I want to claim that the path (s, a, c , b, t) is the shortest s − tpathA barrier is defined by a set S ⊂ V such that s ∈ S and t /∈ S .Let δ(S) be the set of edges that go from a vertex in S to a vertex not inS .Let w(S) be a given weight associated to barrier S .
R. Fukasawa (C&O) Opt. and OR II 11 / 26

Introducing barriers
Suppose we define w(S) = 3 for S = {s}.Any path from s to t must cross the above barrier and have length at leastw(S).Shortest path must have length ≥ 3
R. Fukasawa (C&O) Opt. and OR II 12 / 26

Introducing barriers
Suppose we define w(S) = 2 for S = {s, a, c}.Any path from s to t must cross BOTH barriers and have length at leastthe sum of the weights of the barriers.Shortest path must have length ≥ 5
R. Fukasawa (C&O) Opt. and OR II 12 / 26

Introducing barriers
Suppose we define w(S) = 1 for S = {s, a, b, c , d}.Any path from s to t must cross ALL barriers above and have length atleast the sum of the weights of the barrier.Shortest path must have length ≥ 6
R. Fukasawa (C&O) Opt. and OR II 12 / 26
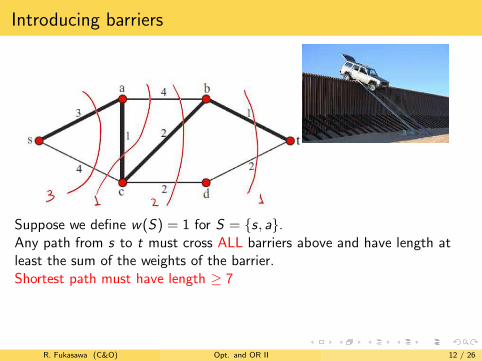
Introducing barriers
Suppose we define w(S) = 1 for S = {s, a}.Any path from s to t must cross ALL barriers above and have length atleast the sum of the weights of the barrier.Shortest path must have length ≥ 7
R. Fukasawa (C&O) Opt. and OR II 12 / 26

Shortest path
If the length of each edge is at least the sum of the weights of thebarriers that it crosses, then we have a set of “feasible barriers”
R. Fukasawa (C&O) Opt. and OR II 13 / 26

Shortest path
If the length of each edge is at least the sum of the weights of thebarriers that it crosses, then we have a set of “feasible barriers”
Let l(P) be the length of a path P and w(B) be the weight of a setof feasible barriers B .
R. Fukasawa (C&O) Opt. and OR II 13 / 26

Shortest path
If the length of each edge is at least the sum of the weights of thebarriers that it crosses, then we have a set of “feasible barriers”
Let l(P) be the length of a path P and w(B) be the weight of a setof feasible barriers B .
We argued that:
l(P) ≥ w(B), for all paths P and feasible barriers B
R. Fukasawa (C&O) Opt. and OR II 13 / 26

Shortest path
If the length of each edge is at least the sum of the weights of thebarriers that it crosses, then we have a set of “feasible barriers”
Let l(P) be the length of a path P and w(B) be the weight of a setof feasible barriers B .
We argued that:
l(P) ≥ w(B), for all paths P and feasible barriers B
Hence we have a min-max relationship:
min{l(P) : P is a path} ≥ max{w(B) : B is a set of feasible barriers}
R. Fukasawa (C&O) Opt. and OR II 13 / 26

Shortest path
If the length of each edge is at least the sum of the weights of thebarriers that it crosses, then we have a set of “feasible barriers”
Let l(P) be the length of a path P and w(B) be the weight of a setof feasible barriers B .
We argued that:
l(P) ≥ w(B), for all paths P and feasible barriers B
Hence we have a min-max relationship:
min{l(P) : P is a path} ≥ max{w(B) : B is a set of feasible barriers}
Theorem
min{l(P) : P is a path} = max{w(B) : B is a set of feasible barriers}
R. Fukasawa (C&O) Opt. and OR II 13 / 26

Exercise
Give a certificate of optimality for shortest A− E path (A,F ,D,E )
R. Fukasawa (C&O) Opt. and OR II 14 / 26

Exercise
Give a certificate of optimality for shortest 1− 15 path (1, 2, 6, 10, 14, 15)
R. Fukasawa (C&O) Opt. and OR II 15 / 26

Another example: Linear Programming
Producing trains and soldiers subject to carpentry and finishing hours.
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9x1 ≥ 0
x2 ≥ 0
(1)
R. Fukasawa (C&O) Opt. and OR II 16 / 26

Bounding the objective
Question
How can we bound the value of 3x1 + 3x2 for any values of (x1, x2)satisfying the constraints below?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
R. Fukasawa (C&O) Opt. and OR II 17 / 26

Bounding the objective
Question
How can we bound the value of 3x1 + 3x2 for any values of (x1, x2)satisfying the constraints below?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
3 × 2nd constraint + 3 × 4th constraint
R. Fukasawa (C&O) Opt. and OR II 17 / 26

Bounding the objective
Question
How can we bound the value of 3x1 + 3x2 for any values of (x1, x2)satisfying the constraints below?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
3 × 2nd constraint + 3 × 4th constraint
3 × 1st constraint + 3 × 3rd constraint
R. Fukasawa (C&O) Opt. and OR II 17 / 26

Bounding the objective
Question
How can we bound the value of 3x1 + 3x2 for any values of (x1, x2)satisfying the constraints below?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
3 × 2nd constraint + 3 × 4th constraint
3 × 1st constraint + 3 × 3rd constraint
1st constraint + 2nd constraint + 4th constraint
R. Fukasawa (C&O) Opt. and OR II 17 / 26

max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
In general, for any y1, y2, y3, y4 ≥ 0:
3x1+3x2 =
y1(2x1 + x2)+y2(x1 + 3x2)+y3(−x1)+y4(−x2)
= (2y1+y2−y3)x1+(y1+3y2−y4)x2 ≤ 8y1+9y2
as long as(2y1 + y2 − y3) = 3(y1 + 3y2 − y4) = 3
So any solution must have objective value at most 8y1 + 9y2
R. Fukasawa (C&O) Opt. and OR II 18 / 26

Duality
This leads to the following related optimization problems:
PRIMAL
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
(P)
DUAL
min 8y1 +9y2s.t. 2y1 +y2 −y3 = 3
y1 +3y2 −y4 = 3y1, y2, y3, y4 ≥ 0
(D)
R. Fukasawa (C&O) Opt. and OR II 19 / 26

Duality
This leads to the following related optimization problems:
PRIMAL
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
(P)
DUAL
min 8y1 +9y2s.t. 2y1 +y2 −y3 = 3
y1 +3y2 −y4 = 3y1, y2, y3, y4 ≥ 0
(D)
Let zP be the value of the optimal solution to (P) and zD be the value ofthe optimal solution to (D).
R. Fukasawa (C&O) Opt. and OR II 19 / 26

Duality
This leads to the following related optimization problems:
PRIMAL
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
(P)
DUAL
min 8y1 +9y2s.t. 2y1 +y2 −y3 = 3
y1 +3y2 −y4 = 3y1, y2, y3, y4 ≥ 0
(D)
Let zP be the value of the optimal solution to (P) and zD be the value ofthe optimal solution to (D).
Theorem (Weak duality)
zP ≤ zD
R. Fukasawa (C&O) Opt. and OR II 19 / 26

Duality
This leads to the following related optimization problems:
PRIMAL
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
(P)
DUAL
min 8y1 +9y2s.t. 2y1 +y2 −y3 = 3
y1 +3y2 −y4 = 3y1, y2, y3, y4 ≥ 0
(D)
Let zP be the value of the optimal solution to (P) and zD be the value ofthe optimal solution to (D).
Theorem (Strong duality)zP = zD
and the optimal solutions can be found reasonably fast (and the sametheorem applies to a more general class of optimization problems)
R. Fukasawa (C&O) Opt. and OR II 19 / 26

Duality
This leads to the following related optimization problems:
PRIMAL
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
(P)
DUAL
min 8y1 +9y2s.t. 2y1 +y2 −y3 = 3
y1 +3y2 −y4 = 3y1, y2, y3, y4 ≥ 0
(D)
In our case, we know a solution x1 = 3, x2 = 2 with value 15.We can for instance find y1 = 1.2, y2 = 0.6, y3 = y4 = 0 which gives us anupper bound of 15
R. Fukasawa (C&O) Opt. and OR II 19 / 26
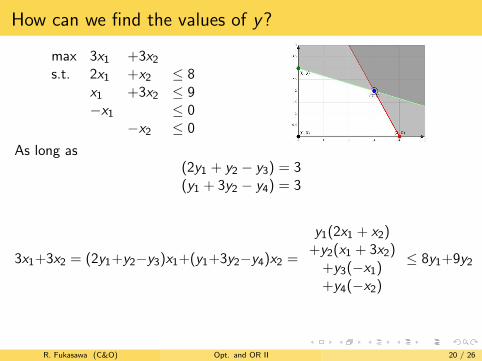
How can we find the values of y?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
As long as(2y1 + y2 − y3) = 3(y1 + 3y2 − y4) = 3
3x1+3x2 = (2y1+y2−y3)x1+(y1+3y2−y4)x2 =
y1(2x1 + x2)+y2(x1 + 3x2)+y3(−x1)+y4(−x2)
≤ 8y1+9y2
R. Fukasawa (C&O) Opt. and OR II 20 / 26

How can we find the values of y?
max 3x1 +3x2s.t. 2x1 +x2 ≤ 8
x1 +3x2 ≤ 9−x1 ≤ 0
−x2 ≤ 0
As long as(2y1 + y2 − y3) = 3(y1 + 3y2 − y4) = 3
3x1+3x2 = (2y1+y2−y3)x1+(y1+3y2−y4)x2 =
y1(2x1 + x2)+y2(x1 + 3x2)+y3(−x1)+y4(−x2)
≤ 8y1+9y2
If I want to prove optimality of (x1, x2) = (3, 2), I can only use nonzero yvalues for the constraints that are satisfied at equality for (3, 2)
R. Fukasawa (C&O) Opt. and OR II 20 / 26

Exercise
Write the dual optimization problem and the optimal primal and dualsolutions.
max 30x1 +100x2s.t. x1 +x2 ≤ 7
4x1 +10x2 ≤ 40−x1 ≤ −3
−x2 ≤ 0
R. Fukasawa (C&O) Opt. and OR II 21 / 26

Exercise
Write the dual optimization problem and the optimal primal and dualsolutions.
min 15A +20Hs.t. A +H = 120
4A −3H ≥ 0−A ≥ −90
−H ≥ −90A ≥ 0
H ≥ 0
R. Fukasawa (C&O) Opt. and OR II 22 / 26