Embed Size (px)
Citation preview

ORIGINAL ARTICLE
Optimal ship tracking on a navigation route between two ports:a hydrodynamics approach
J. K. Panigrahi • C. P. Padhy • D. Sen •
J. Swain • O. Larsen
Received: 20 July 2010 / Accepted: 9 January 2011
� JASNAOE 2011
Abstract The optimal trajectory from Calcutta port to
Mumbai port is charted for a tanker transshipping from the
East coast to the West coast of India during rough weather.
Rough weather is simulated over Indian seas using the
state-of-the-art WAM numerical wave model (WAMDI
Group in J Phys Oceanogr 18:1775–1810, 1988), assimi-
lating satellite (IRS-P4) wind fields. These simulated wave
fields and two-dimensional (2D) directional wave spectrum
are an absolute representation of the irregular seaway.
Hence, the same for the monsoon month of August 2000
formed the input basis for this study. Loss of ship speed
due to the wave field (i.e., nonlinear motion of the tanker in
waves) and associated sea-keeping characteristics in the
seaway are estimated (Bhattacharya in Dynamics of marine
vehicles, Wiley, New York, 1978). The approach adopted
in this paper is unique in that it takes into account both
voluntary and involuntary speed reductions of the ship. It
helps in ship tracking by the optimum route using inverse
velocity as the weight function for the path in an efficient
way. Dijkstra’s algorithm [Numer Math 1(3):269–271,
1959] is applied in an iterative manner for determining the
optimum track. The optimum track information has broad
scope for use in modern shipping industry for obtaining
safe and least-time routing by avoiding schedule delays
with economic fuel consumption.
Keywords Ship behavior � Surface waves � Ship routing �WAM model � OTSR
1 Introduction
Optimum tracking of ship routes (OTSR) involves pro-
viding a vessel with a route recommendation prior to
sailing and thereafter closely monitoring the progress of the
vessel en route, and updating the master to ensure the
vessel achieves either the earliest possible safe arrival or
arrives safely at the required time. This service is also of
great use on coastal routes, by providing the master with
advance warning of heavy weather conditions which may
be encountered. Hence, ship routing is an essential pre-
requisite for all navigators for planning their voyage in any
part of the world ocean. The complexities involved in
OTSR demand multidisciplinary expertise such as wave
forecasting, ship behavior in the seaway, navigation, path
optimization, etc. In this study, the authors demonstrate the
minimal time path for a tanker in transit to Mumbai port
from Calcutta port sailing through the Bay of Bengal and
Arabian Sea. The state-of-the-art WAM wave model [1] is
implemented for establishing the wave climate over a
regional grid system of the Indian Ocean. Rough weather is
simulated, assimilating IRS-P4 [multifrequency scanning
microwave radiometer (MSMR)] analyzed wind fields into
the wave model for the monsoon month of August 2000.
The model predicted synoptic wave fields help in alerting
the ship in advance and simplify the navigator’s decision
regarding the optimum track to be navigated from depar-
ture to destination in a known wave field. This brings out
J. K. Panigrahi (&) � O. Larsen
DHI-NTU Research Centre, DHI Water and Environment,
200, Pandan Loop, Pantech-21, Singapore 128388, Singapore
e-mail: [email protected]
C. P. Padhy � D. Sen
Department of Ocean Engineering and Naval Architecture,
Indian Institute of Technology, Kharagpur, India
J. Swain
Naval Physical and Oceanographic Laboratory,
Kochi 682021, India
123
J Mar Sci Technol
DOI 10.1007/s00773-011-0116-3

the characteristics of the rough waves that the ship will
encounter en route. It is obvious that wind, wave, and cur-
rent impact on ship velocity in the open ocean. However,
waves have maximum impact on the ship due to their
periodic undulation, which significantly alters ship velocity
in an irregular seaway. While sailing, the cost of time spent
at sea by a ship has always been an important factor in the
overall cost of ship operation. Hence, the numerical model
under discussion is based on minimum travel time between a
specified origin and destination point. In the simplest case,
the behavior of the ship is represented by loss of speed due
to the wave field. A similar velocity reduction is estimated in
this study using sea-keeping characteristics as suggested by
Bhattacharya [2]. Furthermore, using the inverse velocity as
the weight function for a given path and optimization
algorithm [3], the minimal time path for the ship is obtained.
1.1 Historical perspective of OTSR
Many efforts [4] have been devoted to minimization of
time spent at sea, such as increasing the power for
achieving speed, aerodynamic and hydrodynamic shape of
the ship, etc. The state of the sea determines the upper
bound of the attainable speed for each ship. The advent of
extended range forecasting and the development of selec-
tive climatology, along with powerful computer modeling
techniques, have made ship routing systems possible. The
ability to effectively advise ships to take advantage of
favorable weather was hampered previously by forecast
limitations and the lack of an effective communication
system. In marine navigation, rough weather routing has
long been neglected due to the unavailability of systematic
wave observations and regular wave forecasts over the
Indian Ocean for the past several years [5]. Hence, it was
not possible to operationally forecast minimal time ship
routes based on sea state. In recent years, with the launch of
satellites and advancement of wave modeling, many
operational satellites and numerical models (WAVE-
WATCH III, WAM, SWAN, and OSW/SW-Mike21) can
give wind-wave parameters on a coarse and fine grid res-
olution over the world ocean. Hence, it has become feasible
to carry out routine wave forecasting and provide optimal
ship routes using these meteorological products.
1.2 Literature review
Originally, the concept of OTSR evolved in the US Navy
for minimal time routing of warships. Hence, most of the
literature in this area is of defense interest and classified.
Subsequently, the problem of obtaining an optimal ship
trajectory attracted the attention of many civilian
researchers. In this context, a few pertinent reports are cited
here to assess the evolution of research in this field.
In the past, Hanssen and James [6] demonstrated an
optimum ship route under stationary weather conditions.
Development of more realistic routing mechanisms using
variational methods assuming ship speed under maximum
power to be independent of time was attempted by Haltiner
et al. [7]. Models based on numerical methods to propose
an optimal trajectory were attempted by Faulkner [8].
Employing Pontryagin’s maximum principle, ship routing
problems were studied using a rectilinear, spherical coor-
dinate system, advocating solution of a system with three
nonlinear differential equations with appropriate boundary
conditions to provide an optimal ship trajectory. These
models, however, had constraints pertaining to undesired
ship motions and treatment of continental obstacles.
Zoppoli [9] formulated the minimal time algorithm as an
N-stage discrete process subjected to stochastic and
dynamic conditions. A deterministic dynamic program-
ming procedure was carried out on a grid system similar to
that used by Zoppoli [9] to investigate the total voyage
time. Mitchell and Papadimitriou [10] investigated the
shortest path through a weighted planar subdivision.
Optimum routing in the past was attempted based on long-
term weather conditions and sea-keeping criteria. Typi-
cally, routes were planned based on a set of generic
‘‘speed-reduction’’ curves to predict ship position and
anticipated weather conditions along the intended course
[11]. The weakness of this rather oversimplified method is
that it does not guarantee an optimal path, since combi-
nations of all possible paths may not be investigated. In
addition, factors related to involuntary speed reduction are
not taken into account. Several authors discussed the prob-
lem of ship weather routing in different ways to find a
minimal time solution, viz. variational calculus method,
broken extremal approach, isochrone method, etc. These
approaches, however, appear to have limitations in the sense
that they do not appear to handle well the part associated
with voluntary speed reduction. Hence, the path optimization
algorithm that we use here is Dijkstra’s algorithm. Routing
decisions of ships using advanced meteorological modeling
and satellite data employing Dijkstra’s algorithm [3] were
investigated by Anel [12] and the US Navy Meteorology and
Oceanography (METOC). Bekker and Schmid [13] investi-
gated the use of Dijkstra’s algorithm and a genetic algorithm
to achieve practical strategies and a method in which the two
optimization techniques interact to provide a safe route,
considering the risk of both sea mines and the environment,
making it applicable to sea mine avoidance.
2 Data
In the present study, wave model hindcast data are used by
assimilating IRS-P4 analyzed wind fields into the WAM
J Mar Sci Technol
123

wave model. IRS-P4 (Oceansat-I) was launched by India in
1999, with two payloads, namely MSMR and ocean color
monitor (OCM). The MSMR sensor is configured as an
eight-channel radiometer using four frequencies with dual
polarization. It has three resolutions, and the geophysical
products are also processed for three standard grid sizes
(150 9 150, 75 9 75, and 50 9 50 km2) covering the
whole globe. There are a total of eight geophysical prod-
ucts, including wind speed (accuracy ±2 m/s) without
direction [14]. Again, the exact repeat period of the satel-
lite is 2 days. However, both wind speed and direction are
essential for sea state prediction. Hence, the MSMR winds
over 150 9 150 km2 are blended with medium-range
global weather forecasts by the National Center for Med-
ium-Range Weather Forecast (NCMWF) along with the
various other available data, including data received
through Global Telemetric System (GTS) for the prepara-
tion of analyzed fields suitable for sea state nowcasting.
IRS-P4 gives scalar winds, which are converted to vector
winds by appropriate operators from observation space to
analysis space. The operational analysis and forecast sys-
tem at NCMWF is based on a T80L18 global spectral
model and spectral statistical interpolation (SSI) schemes
for data analysis. The analysis scheme is mainly based on
the Lorenc [15] concept of minimizing a cost function in
terms of the deviation of desired analysis from the first
guess field, which is taken as the 6-h forecast, and the
observations, weighted by the inverse of the forecast and
observation errors. The detailed methodology for comput-
ing vector winds is available in Kamineni et al. [16]. The
objective analysis scheme in SSI takes care of generating
six-hourly wind fields from 48 h satellite wind data gaps.
Atmospheric conditions over the Indian seas (Bay of
Bengal and Arabian Sea) are also unique, as the winds over
this basin reverse semiannually, blowing from the south-
west during the summer monsoon and from the northeast
during the winter monsoon. In the absence of any observed
data over the oceanic region, the 6-h model forecast
(serving as a background field as a guess) is retained in the
analysis. The assimilated products such as the zonal and
meridional components of winds at six-hourly intervals are
processed and supplied by NCMWF. This wind is known
as the IRS-P4 analyzed wind field, having u- and v-wind
components covering the south to north Indian Ocean,
being available for sea state forecasting. The same has been
assimilated into the third-generation wave model WAM for
simulating six-hourly wave parameters. Wind speed and
direction for the monsoon month of August are used here
for wave model hindcasting. The mean monthly wind fields
for the rough weather month of August 2000 are presented
in Fig. 1 as a contour map. The contours show the wind
speed in m/s, and arrows represent direction. These wind-
wave parameters are used for meteorological navigation.
3 Methodology
The basic principles involved in optimal ship routing are
the same as those for minimum flight time of an aircraft
flying at fixed level [17]. However, the two problems differ
primarily in the manner in which the environment impedes
the motion of the vehicle. The methodology adopted to
carry out this study is described in the following sections.
The first section describes the implementation of the wave
model for simulating an irregular seaway, while subsequent
sections describe the ship behavior in the seaway and route
optimization, respectively.
3.1 Wave modeling
The state-of-the-art third-generation WAM wave model
(Cycle-4) is used in this study, originally developed by the
WAMDI Group [1]. It integrates the basic transport equa-
tion without any prior assumptions on the shape of the
wave spectrum. WAM requires wind input on the pre-
scribed model grids and computes the evolution of two-
dimensional wave spectrums for the full set of degrees of
freedom [18]. It provides 25 frequencies and 12-directional
discretization for evolution of the wave spectrum by
solving 1.2 million equations for each grid. The source
terms and the propagation are computed with different
numerical methods and time steps. The model outputs are
significant wave height, peak and mean wave periods,
mean wind-wave directions, swell wave height, swell fre-
quency and direction, frictional wind velocity, wave-
induced stress, and the two-dimensional wave spectrum.
The model is being updated with new advances and con-
tinually validated with long-term measurements from
moored buoys and satellite data [19]. In the history of wave
modeling, in the early 1960s the first attempt was made to
develop wave models considering the source term as the
sum of atmospheric input and white-cap dissipation, known
30 40 50 60 70 80 90 100 110 120Longitude
-30
-20
-10
0
10
20
30
Lat
itud
e
Fig. 1 Mean monthly IRS-P4 analyzed wind fields for August 2000
J Mar Sci Technol
123

as first-generation wave models. In the late 1970s, second-
generation wave models were developed, with increased
understanding of the physical processes responsible for
wind-wave generation, propagation, decay, and nonlinear
interaction (JONSWAP) [20]. The present model used in
this study is a spectral wave model that takes care of the
wind input term and associated spectral change, and the
complete spectral energy change due to nonlinear wave–
wave interaction and dissipation due to white-capping.
The sea state parameters are simulated using six-hourly
IRS-P4 analyzed wind fields. The mean monthly wave
climate for the monsoon month of August 2000 is estab-
lished using this model. The outputs plotted in Figs. 2 and
3 show the spatial distribution of significant wave height
and peak wave period with mean wave direction, respec-
tively, over the Indian Ocean. The time-series wave
parameters of the model have been validated against buoy
data by Panigrahi [21] and Panigrahi and Swain [22]. It is
reported [5, 23] that, over the Bay of Bengal, the significant
wave height shows root-mean-square deviation of 0.24 m.
The average 2D directional wave spectrum simulated at
central Bay of Bengal and Arabian Sea for the month of
August 2000 are presented in Figs. 4 and 5, respectively.
These are absolute representations of waves in an irregular
seaway. The multiple peaks of the spectrum show the
occurrence of various wave groups having different wave
periods. The spectral peaks show the maximum energy
levels associated with predominant wave directions.
3.2 Ship behavior in seaway
The theory of ship behavior in a seaway is referred to as the
sea-keeping characteristics of the vessel. Mostly, this
30 40 50 60 70 80 90 100 110 120Longitude
-30
-20
-10
0
10
20
30
Lat
itud
e
Fig. 2 Mean monthly WAM simulated significant wave height
(m) and mean wave direction (�) for August 2000
30 40 50 60 70 80 90 100 110 120Longitude
-30
-20
-10
0
10
20
30
Lat
itud
e
Fig. 3 Mean monthly WAM simulated peak wave period(s) and
mean wave direction for August 2000
Fig. 4 Two-dimensional directional wave spectrum at central Bay of
Bengal, August 2000
Fig. 5 Two-dimensional directional wave spectrum at central Ara-
bian Sea, August 2000
J Mar Sci Technol
123

involves ship motion due to waves, which include several
factors, viz. (1) loss of speed in a seaway and added
resistance, (2) wave loads and structural design, (3) habi-
tation, comfort, and safety, (4) slamming, deck wetness,
and propeller emergence, and (5) the establishment of
operational limits for mission requirements.
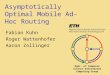
All these aspects of sea-keeping or ship behavior in
waves result from the six fundamental modes of rigid-body
motion (Fig. 6) of the ship in waves, e.g., three linear
motions along longitudinal, transverse, and vertical axes
defined as surge (xb), sway (yb), and heave (zb), respec-
tively, and the three rotational motions around these axes
defined as roll (ø), pitch (h), and yaw (w). These funda-
mental motions further set for deriving other useful derived
responses. The various responses of the vessel in regular
monochromatic waves are represented by corresponding
transfer functions, generally termed response amplitude
operators (RAO). For an incident wave of amplitude fw and
absolute frequency x, the incident wave elevation f is
given by
fðx!; tÞ ¼ fxcosðk!
x!�xtÞ; ð1Þ
where k!
is the wavenumber. Any particular response r(t) of
the ship will be of the form
rðtÞ ¼ Rcosðxet þ erfÞ; ð2Þ
where R is the amplitude of the response, erf is the phase
angle between the response and the incident encountered
wave, and xe is the frequency of encounter, which
depends on the ship speed (V), the ship heading (b) with
respect to the waves, and the absolute wave frequency
(x):
xe ¼ x 1� xV
gcosb
� �: ð3Þ
The response can thus be written as
rðtÞ ¼ RAO � fWcosðxet þ erfÞ; ð4Þ
where
RAOðx;V; hÞ ¼ Rðx;V ; bÞ=fW: ð5Þ
It is noted that the amplitude of the response R depends
on the absolute frequency (x), the ship speed (V), and the
relative heading (b = ls - lw), and therefore RAO can be
determined over a range of these three variables. Here, ls
and lw represent the ship heading angle and wave
direction, respectively. In general, most of the ship
responses depend linearly on the incident wave amplitude
fw. Few response parameters such as added resistance
(RAW) that are a second-order function of incident wave
amplitude ðfWÞ are crucial. In this case, the appropriate
relation to determine the response spectrum can be
modified as
SAWR ðxeÞ ¼
RAW
f2W
SWðxeÞ; ð6Þ
where RAW is added resistance in monochromatic waves at
the given encountered frequency (i.e., at the given
combination of speed, heading, and absolute frequency),
and SRAW is the added resistance spectrum. The average
(mean) added resistance in an irregular wave field (i.e., in
an incident wave spectrum) is given by twice the area
under the spectrum,
�RAW ¼ 2ffiffiffiffiffiffim0
p; m0 ¼
Z1
0
SAWR ðxeÞdxe: ð7Þ
This differs from the other responses varying linearly
with wave amplitude. Statistical quantities such as the
average amplitude, significant amplitude, etc. are
proportional to the square root of the area under the
corresponding response spectra. Furthermore, a simplified
formulation for added resistance suggested by
Bhattacharya [2] can be plugged into the calculations,
RAW ¼x3
e
2gðbzz
2a þ bhh
2aÞ; ð8Þ
where za and ha are heave and pitch displacements for
corresponding heave ðbzÞ and pitch ðhaÞ damping,
respectively.
Several other simplified relations of varying levels of
complexity are available in literature, each producing
estimates of added resistance with progressively greater
degrees of accuracy. All formulae are based on hydrody-
namic characteristics of the hull in the vertical plane (heave
and pitch motions, total added mass and damping, sectional
added mass and damping, gradient of sectional added mass
along length, gradient of vertical relative motions along
length, etc.). As can be seen, determination of ship
behavior in an irregular wave field essentially requires
evaluation of the ship response in regular monochromatic
Fig. 6 Definition of ship motions
J Mar Sci Technol
123

waves (i.e., determination of the fundamental RAOs). This
is the most complicated and difficult part of evaluation of
sea-keeping characteristics. The RAOs represent charac-
teristics of a given hull, regardless of the prevailing wave
condition. For any given hull, a set of RAOs can be pre-
computed over a range of ship speeds, relative headings,
and wave frequencies. Using these as a database, the
response in any given sea condition (i.e., wave field: wave
height and wave direction) can be determined fairly by
interpolating the RAOs and carrying out spectral calcula-
tions. Furthermore, the mean added resistance, �RAW ¼�RAWðV ; b;HsÞ database can be prepared for equal intervals
of V, b, and Hs by adopting a similar interpolation scheme.
This database can help to arrive at the added resistance
(RAW) corresponding to a given sea state.
Adopting the above mathematical formulations, the
ship’s behavior in the seaway is determined for the present
study, and a database is generated. A vessel having overall
length (LOA) of 60.0 m and beam of 11.0 m is chosen
from Clarkson’s Registrar [24]. The trajectory of the ship,
from Calcutta to Mumbai (old name Bombay) and vice
versa, is assumed as the normal navigation track (Fig. 7)
for attending the call between the two ports. It is seen from
the figure that the commercial navigation route is via
Colombo port, covering a distance of 1244 nautical miles
from Calcutta to Colombo and 889 nautical miles from
Colombo to Mumbai [25]. The optimal back-and-forth
route is estimated following the algorithm described in the
subsequent section.
3.3 Ship route optimization
Route optimization of a ship involves optimization of
several factors, viz. (1) minimum transport time linked to
speed loss in the seaway, (2) minimum fuel cost linked
with added resistance in waves and total distance, (3)
minimum structural damage, (4) maintaining minimum
motions for specific operations (e.g., minimum relative
motion in vertical plane, roll motions, etc.), and (5) fixed
time of arrival. The various factors discussed above can
be related to: (a) involuntary speed reduction due to
increased resistance in the seaway and the decrease in
propeller efficiency in rough weather, and (b) voluntary
speed reduction, which is deliberate reduction in speed
Fig. 7 Commercial navigation route between the two ports (Calcutta–Mumbai)
J Mar Sci Technol
123

by the ship’s captain to ensure that ship behavior
remains within acceptable safety limits, since it is found
that in general a reduction in speed improves sea-keep-
ing characteristics. In our implementation, distance
between two nodal points in a spatial grid is expressed
as a weight function. These weights can be viewed as
the objective function, which are obtained by combining
weather information (WAM computed wave parameters)
along with vessel sea-keeping characteristics. The gen-
eral framework of Dijkstra’s algorithm [3] is described
here.
Considering a weight directed graph (Fig. 8) or digraph
(G), where G = (V, E), with a weight function w:
E ? R mapping edges to real-valued weights. The weight
of path P ¼ ðv0; v1; v2; . . .; vkÞ is the weighted sum of its
constituent edges and can be represented by Eq. 9
wðPÞ ¼Xk
i¼1
w vi�1; vi½ �; ð9Þ
where w is weight, vi is the ith vertex, and vi-1 is the (i - 1)th
vertex.
Edge weight dðu; vÞ can be defined as the shortest path
weight (w) from u to v, i.e., w(P) = d(u, v) and is given by
d u; vð Þ ¼ min wðPÞ : u! vf g if path exist from u to vð Þ¼ 1 otherwiseð Þ ð10Þ
Adapting this algorithm, a code has been developed. If
the start and destination nodes are defined for a given grid
with associated weights, the algorithm finds the optimal
path joining these two nodes through grid points. For a
distance L between two neighboring nodes with
corresponding sea-state parameters, the mean value of the
added resistance (RA) is determined. This computation
requires interpolation of the motion data (RAO) for
appropriate speed and ship heading relative to wave
direction. The weights can be represented as: w = L/V,
where V = P/(Rc ? RA), where ‘Rc’ is the calm water
resistance of the ship (which can be related to the ship’s
engine power through a set of parameters, all of which are
assumed to be known for a given ship). The weights are
thus the time taken by the ship to travel between the two
considered neighboring nodes in the wave environment. By
assigning these as weights wi,j over the network, the path
having minimum weight T is determined as the shortest
path [26].
T ¼X
ij
Lði;jÞ
.Vredði;jÞ
h ior; T ¼
Xij
Lði;jÞ
.VMði;jÞ
h i;
ð11Þ
where L (i,j) is the distance between two neighboring nodes
i and j, Vredði;jÞ is the (involuntarily) reduced speed of ship
between node i and node j due to its added resistance, and
VMði;jÞ is the maximum allowable speed between the path
connecting nodes (i, j) beyond which a certain response
(e.g., slam, acceleration, etc.) exceeds the prescribed limit
(RT).
4 Results and discussion
This paper aims at charting the optimal route from Calcutta
port to Mumbai port and vice versa using model simulated
wave data derived from remotely sensed winds. The mean
monthly wind speed and direction distribution (Fig. 1) for
August 2000 could clearly identify regions of highs and
lows and the mean wind directions. The satellite observed
wind in general shows an average wind velocity in the
range 4–10 m/s prevailing over the Indian seas for SW
monsoon month. In particular, closer to the Indian coast,
the wind varies between 4 and 6 m/s. Corresponding mean
monthly wave height ranges from 1.0 to 3.5 m over the
model domain (Fig. 2). The wave height contour of 1.5 m
runs closer to the east coast and the 2.0 m contour closer to
the west coast of India, whereas waves of order 2.0 and
2.5 m prevail over the central Bay of Bengal and Arabian
Sea, respectively. Similarly, the wave period ranges from 6
10
23
11
43
17
35
( , ) :12I Jw
I J K
L M N
( , ) : 87I Mw
( , ) :12L Iw
Fig. 8 Representation of the
directed weighted graph (G)
J Mar Sci Technol
123

to 10 s in the model domain (Fig. 3), revealing that the sea
state is composed of wind-seas and swells. Furthermore,
closer to the coast, the peak wave period varied between 8
and 10 s, which indicates that the sea state is dominated by
remotely generated swells as compared with locally gen-
erated wind-waves. The mean wave directions mainly
follow the mean wind pattern, i.e., predominantly prevail-
ing from the SW, excepting some local variations. The
predominant direction of wave approach at each grid point
with respect to the ship’s course determines the irregular
seaway, viz. head sea, astern sea or bow sea. Hence, a
sample mean monthly 2D directional wave spectrum is
presented for deeper section at central Bay of Bengal
(Fig. 4) and central Arabian Sea (Fig. 5). Both spectra
exhibit similar energy peaks of the order of 0.5–2.5 m2/Hz
in the frequency band 0.3–0.1 Hz. As the winds blow
consistently over longer fetch and duration due to the
active southwest monsoon in the open sea, the swell waves
were consistently present, excepting periods of very strong
winds, generating various wave groups ranging from 3 to
10 s period. Mainly, the mean monthly wind and wave
fields are quite promising, and they follow the standard
climatic wind and wave variability patterns for Indian seas
[27, 28]. Using this sea-state information, rough weather
routing is carried out from departure to destination. The
shortest path algorithm is utilized to obtain the optimal
route between the two national ports of Calcutta and
Mumbai (Fig. 7). The results of the optimal ship route
between these two locations are presented in Figs. 9 and
10, where the route circumnavigates seven Maritime
Provinces of West Bengal, Orissa, Andhra Pradesh, Tamil
Nadu, Kerala, Karnataka, and Maharashtra. The optimal
path line connecting these two ports passes around the
island country of Sri Lanka, covering a distance of 2155.25
nautical miles. The total time taken by the ship from
Calcutta to Mumbai and vice versa is 205.17 and 203.60 h,
respectively. In addition to sea-keeping characteristics,
slam response (=50/h) is considered in case of consider-
ation of voluntary speed reduction. The effect of added
resistance is to reduce the speed by the order of a few
percentage, and therefore large deviations in paths are not
usually obtained unless wave conditions drastically differ
between adjacent zones. This algorithm is promising and
extensively used in transportation planning.
5 Conclusions
The influence of sea-state dynamics on the safety and
economy of a ship’s route are of considerable concern to
the modern shipping industry. The most important envi-
ronmental factors relating to the safety and performance of
a ship on high seas are prevailing ocean surface winds and
waves. In this context, the WAM wave model predicts the
synoptic wave field using IRS-P4 analyzed winds with a
higher level of confidence. The simulated model outputs
are very useful for meteorological navigation and avoid-
ance of heavy weather damage. The formulations of
Bhattacharya [2] for estimating ship motion and sea-
keeping characteristics appear realistic. The results of this
study show that the chosen algorithm is capable of simu-
lating the optimal route between given departure and des-
tination nodes reasonably well. The numerical code
developed and implemented here differentiates continental
boundaries from water, and estimates the minimal routing
path, avoiding land barriers. In this paper, the problem of
minimal time ship routing is demonstrated using a static
mean monthly sea state for one of the rough weather
months (August) of the year in Indian seas. The same can
60 63 66 69 72 75 78 81 84 87 90 93
Longitude (degree East)
-3
0
3
6
9
12
15
18
21
24
Lat
itud
e ( d
egre
e N
orth
)
Calcutta
Mumbai
INDIA
Fig. 9 Optimum route from Calcutta to Mumbai
60 63 66 69 72 75 78 81 84 87 90 93
Longitude (degree East)
-3
0
3
6
9
12
15
18
21
24
Lat
itud
e (d
egre
e N
orth
)Calcutta
Mumbai
INDIA
Fig. 10 Optimum route from Mumbai to Calcutta
J Mar Sci Technol
123

be implemented more realistically by assimilating satellite
wind and wave data at higher spatiotemporal resolution.
However, this needs extensive validation with ship log data
before it can be made operational. Such a practical solution
to the problem of optimal ship routing is very important to
shipping communities. Furthermore, operational ship
routing services can also be provided in combination with
an onboard voyage planning system. This study should also
help navigators to track the ship via an optimum route,
taking into account safety, minimal time, and probably
minimum fuel consumption. It may be concluded that the
modern shipping industry will find this work very useful
and that it also has wider scope for use in warship routing.
Acknowledgments The authors are thankful to Head, Department
of Ocean Engineering and Naval Architecture, IIT, Kharagpur, India
and Director, DHI-NTU Water & Environment Research Centre and
Education Hub, Singapore, for extending support and encouragement
for this work. This study is a collaboration of Ph.D. works of Dr.
Chinmaya P. Padhy and Dr. Jitendra K. Panigrahi under the super-
vision of Prof. D. Sen and Dr. J. Swain, respectively.
References
1. WAMDI Group (1988) The WAM model—a third generation
ocean wave prediction model. J Phys Oceanogr 18:1775–1810
2. Bhattacharya R (1978) Dynamics of marine vehicles. Wiley, New
York, p 508
3. Dijkstra EW (1959) Note on two problems in connection with
graphs (spanning tree, shortest path). Numer Math 1(3):269–271
4. Marks W, Goodman TR, Pierson WJ, Tick LJ, Vassilopoulos LA
(1968) An automated system for optimum ship routing. Trans Soc
Nav Archit Mar Eng 76:22–55
5. Swain J (1997) Simulation of wave climate for Indian seas. Ph.D.
thesis, Cochin University of Science and Technology, India
6. Hanssen GL, James RW (1960) Optimum ship routing. J Inst
Navig 10(3):253–272
7. Haltiner GJ, Hamilton HD, Arnason G (1962) Minimal time ship
routing. J Appl Meteorol 1:1–7
8. Faulkner FD (1963) Numerical methods for determining opti-
mum ship routes. J Inst Navig 10(4):351–367
9. Zoppoli R (1972) Minimum-time routing as an N-stage decision
process. J Appl Meteorol 11:429–435
10. Mitchell JSB, Papadimitriou CH (1991) The weighted region
problem: finding shortest paths through a weighted planar sub-
division. J Assoc Comput Math 38(1):18–73
11. Panigrahi JK, Umesh PA (2008) Minimal time ship routing using
IRS-P4 (MSMR) analysed wind fields. Mar Geod 31:39–48
12. Anel AM (2005) Network shortest path application for optimum
track ship routing. M.S. thesis, Naval Postgraduate School,
Monterey, CA. Report No. A106534, p 93
13. Bekker JF, Schmid JP (2006) Planning the safe transit of a ship
through a mapped minefield. J Oper Res Soc S Afr 22(1):1–18
14. Bhatia RC (2001) Validation of water vapour and wind speed
products derived from MSMR payload onboard IRS-P4 Satellite
and meteorological applications of data products. In: Proceedings
of Megha-Tropiques 2nd scientific workshop. Directeur de la
Publication, Remy Roca, 2–6 July 2001, pp 1–6
15. Lorenc AC (1986) Analysis methods for numerical weather
prediction. Q J R Meteorol Soc 112:1177–1194
16. Kamineni R, Rizvi SRH, Kar SC, Mohanty UC, Paliwal RK
(2002) Assimilation of IRS-P4 (MSMR) meteorological data in
the NCMRWF global data assimilation system. In: Proceedings
of Indian Academy of Science (Earth and Planetary Science).
111(3):351–364
17. Arrow KJ (1949) On the use of winds in flight planning.
J Meteorol 6:150–159
18. Komen GJ, Cavaleri L, Donelan M, Hasselmann K, Hasselmann
S, Janssen PAEM (1994) Dynamics and modelling of ocean
waves. Cambridge University Press, UK
19. Swain J, Panigrahi JK, Vijayakumar D, Venkitachalam NRV
(2003) Performance of 3g-WAM using IRS-P4 winds for its
operational implementation in the Indian Ocean. In: Proceedings
of the symposium on microwave remote sensing applications.
CSRE IITB, India, p 1
20. Hasselmann K, Barnett TP, Bouws E, Carlson H, Cartwright DE,
Enke K, Ewing JA, Gienapp H, Hasselmann DE, Kruseman P,
Meerburg A, Muller P, Olbers DJ, Riehter K, Sell W, Walden H
(1973) Measurement of wind-wave growth and swell decay
during the joint North Sea Wave Project (JONSWAP). Deutsche
Hydrographische Zeitschrift A8(12)
21. Panigrahi JK (2007) Wind induced surface gravity waves in the
north Indian Ocean and their potential applications. Ph.D. thesis,
Berhampur University, India, p 91
22. Panigrahi JK, Swain J (2010) Numerical simulation and valida-
tion of deepwater spectral wind-waves. Mar Geod 33:39–52
23. Bhatt V, Sarkar A, Kumar R, Basu S, Agarwal VK (2004) Impact
of Oceansat-I MSMR data on analyzed oceanic winds and wave
predictions. Ocean Eng 31(17):2283–2294
24. Clarkson Registrar (2006) Bharat Book Bureau CD. Standard
edition
25. (1970) Admiralty charts and publications. Routing chart Indian
Ocean. UK Hydrographic Office, Taunton
26. Taha H (2002) Operations research: an introduction, 7th edn.
Prentice Hall, New Jersey, p 222
27. Hastenrath S, Lamb PJ (1979) Surface climate and atmospheric
circulation. Climatic atlas of the Indian Ocean. Part-I. The Uni-
versity of Wisconsin Press, USA
28. Young IR, Holland GJ (1996) Atlas of the oceans: wind and wave
climate. Pergamon/Elsevier Science, USA, p 1
J Mar Sci Technol
123