Embed Size (px)
Citation preview
Optimal Kernel Filtering for System Identification
Jose C. PrincipeJose C. Principe
Computational NeuroEngineering Laboratory (CNEL)U i it f Fl idUniversity of Florida

AcknowledgmentsAcknowledgments
Dr. Weifeng Liu, Amazon
D B d Ch T i h U i iDr. Badong Chen, Tsinghua University and Post Doc CNEL
NSF ECS – 0300340, 0601271, 0964197(N i i )(Neuroengineering program)

O tliOutline
1 Introduction1. Introduction2. Least-mean-square algorithm in Kernel Space3. Kernel Affine Projection Algorithms and Recursive3. Kernel Affine Projection Algorithms and Recursive
Least Squares4. Active Learning in Kernel Filtering5. Conclusion

Wiley Book (2010)Wiley Book (2010)
Papers are available atPapers are available atwww.cnel.ufl.edu

Optimal System ID Fundamentals
System identification is regression in functional spaces: Given data pairs {u(n) d(n)} and a functional mapper y=f(u w) minimize J(e)
Optimal System ID Fundamentals
pairs {u(n),d(n)} and a functional mapper y=f(u,w), minimize J(e)Data d(n)
f(u(n) w) −
=−= 1
0)()()( N
iinuiwny
AdaptiveSystem
Data u(n) Output Error e(n)
f(u(n),w)
Cost J=E(e2(n))
Learning
Optimal solution is least squares where R is the autocorrelation matrix of the input data over the lags and p is the crosscorrelation vector between input and desired
J E(e (n))
pRw 1* −=
crosscorrelation vector between input and desired.
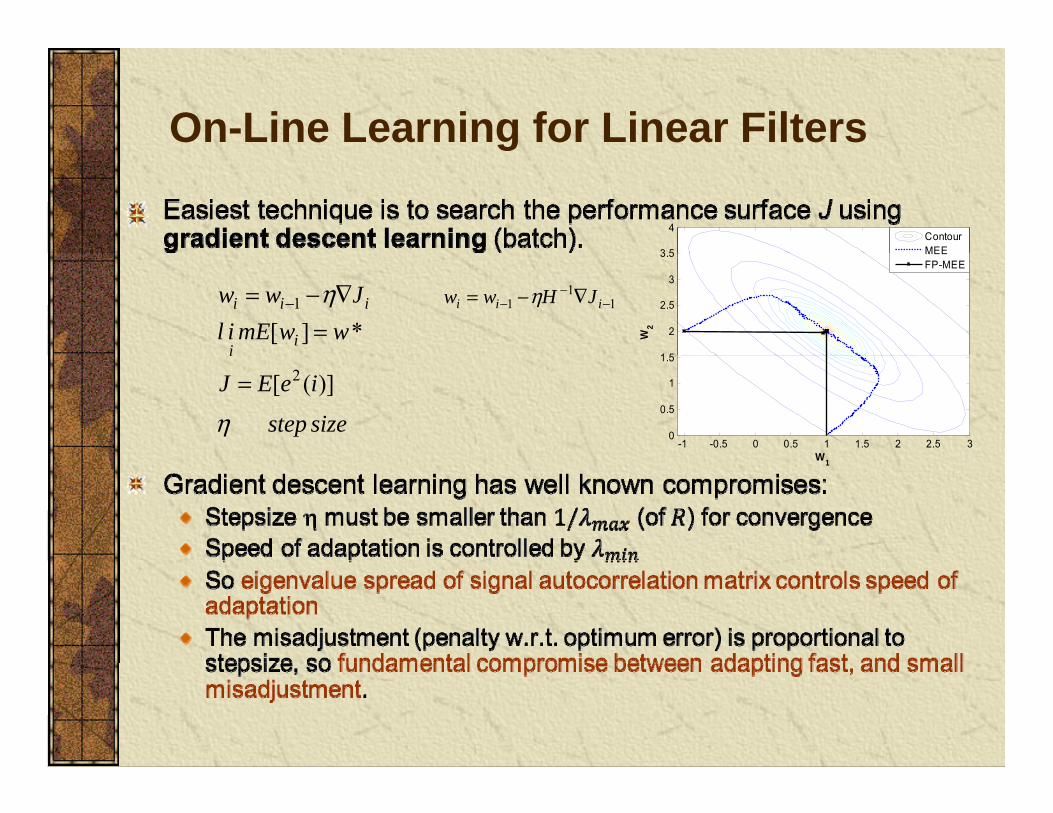
On-Line Learning for Linear Filtersg
3 5
4ContourMEE
wwmEilJww
ii
iii η*][
1
=∇−= −
W2
1 5
2
2.5
3
3.5 MEEFP-MEE
11
1 −−
− ∇−= iii JHww η
sizestep
ieEJi
η)]([ 2=
W-1 -0.5 0 0.5 1 1.5 2 2.5 3
0
0.5
1
1.5
W1

On-Line Learning for Non-Linear Filters?g
Can we generalize to nonlinear models?1i i i iw w G e−= +g
and create incrementally the nonlinear mapping?
Ty w u= ( )y f u=y pp g
( )y i
iiii eGff += −1
ifiu ( )y i
Σ( )e i
Σ
( )d i

Non-Linear Models - TraditionalNon Linear Models Traditional(Fixed topologies)
Hammerstein and Wiener modelsHammerstein and Wiener modelsAn explicit nonlinearity followed (preceded) by a linear filterNonlinearity is problem dependentDo not possess universal approximation propertyDo not possess universal approximation property
Multi-layer perceptrons (MLPs) with back-propagationNon-convex optimizationL l i iLocal minima
Least-mean-square for radial basis function (RBF) networks Non-convex optimization for adjustment of centersLocal minima
Volterra models, Recurrent Networks, etc

Non-linear Methods with Kernels
Universal approximation property (kernel dependent)Convex optimization (no local minima)Convex optimization (no local minima)Still easy to compute (kernel trick)But require regularizationSequential (On-line) Learning with KernelsSequential (On line) Learning with Kernels
(Platt 1991) Resource-allocating networksHeuristicNo convergence and well-posedness analysis
(Frieb 1999) Kernel adalineFormulated in a batch modewell-posedness not guaranteedg
(Kivinen 2004) Regularized kernel LMSwith explicit regularizationSolution is usually biased
(Engel 2004) Kernel Recursive Least Squares(Engel 2004) Kernel Recursive Least-Squares (Vaerenbergh 2006) Sliding-window kernel recursive least-squaresLiu, Principe 2008,2009, 2010.
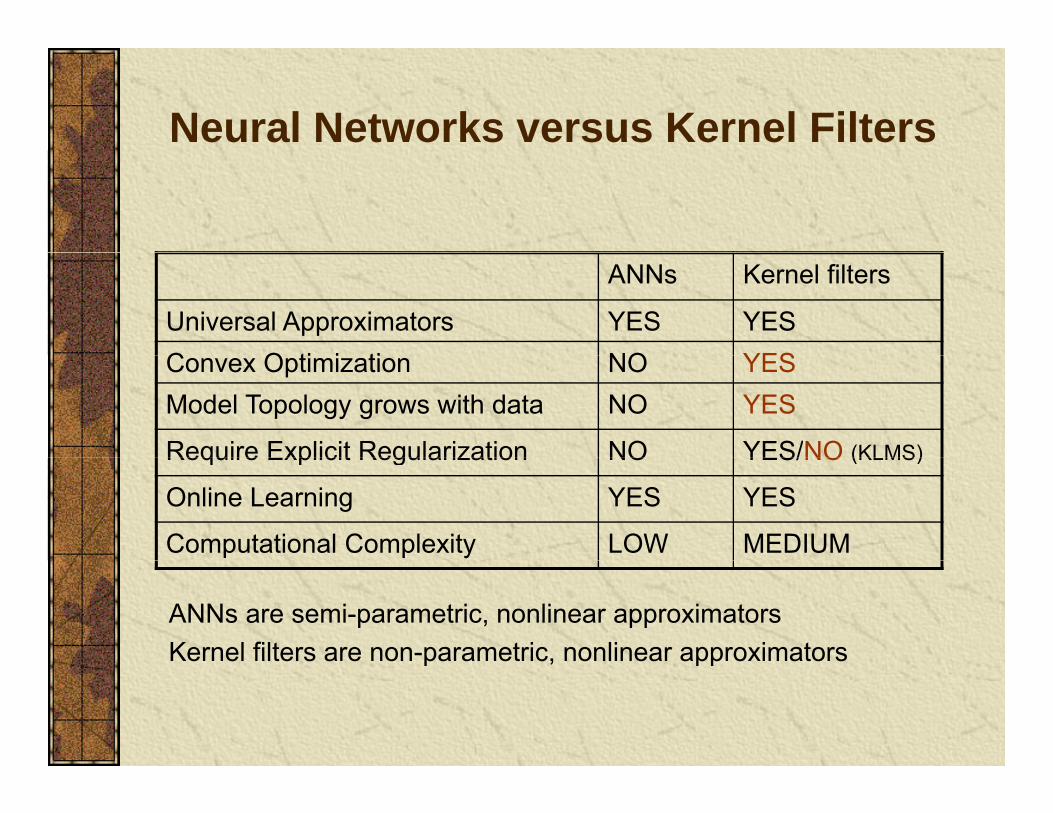
Neural Networks versus Kernel Filters
ANNs Kernel filters
Universal Approximators YES YESC O ti i ti NO YESConvex Optimization NO YESModel Topology grows with data NO YES
Require Explicit Regularization NO YES/NO (KLMS)Require Explicit Regularization NO YES/NO (KLMS)
Online Learning YES YES
Computational Complexity LOW MEDIUM
ANNs are semi-parametric, nonlinear approximatorsKernel filters are non-parametric, nonlinear approximatorsp , pp
Kernel Methods
Kernel filters operate in a very special Hilbert space of functions called a Reproducing Kernel Hilbert Space (RKHS).p g p ( )A RKHS is an Hilbert space where all function evaluations are finiteOperating with functions seems complicated and it is! But itOperating with functions seems complicated and it is! But it becomes much easier in RKHS if we restrict the computation to inner products. Most linear algorithms can be expressed as inner products
)()()(1
ninxwnyL
xwT−
Most linear algorithms can be expressed as inner products. Remember the FIR
)()()(0
ninxwnyi
i xw=−==

Kernel methods
Moore-Aronszajn theoremEvery symmetric positive definite function of two real variables has a unique Reproducing Kernel Hilbert Space (RKHS).
)exp()( 2yxhyxk −−=
Mercer’s theoremLet K(x,y) be symmetric positive definite. The kernel can be
d d i th i
)exp(),( yxhyxk −−=
expanded in the series
Construct the transform as1
( , ) ( ) ( )m
i i ii
x y x yκ λϕ ϕ=
=
Inner product
( ) ( ) ( )x y x yϕ ϕ κ, = ,
1 1 2 2( ) [ ( ), ( ),..., ( )]Tm mx x x xϕ λ ϕ λ ϕ λ ϕ=
( ) ( ) ( )y yϕ ϕ, ,

Kernel methods
Mate L., Hilbert Space Methods in Science and Engineering, A. Hildger, 1989Berlinet A., and Thomas-Agnan C., “Reproducing kernel Hilbert Spaces in probaability and Statistics, Kluwer 2004

Basic idea of on-line kernel filteringg
Transform data into a high dimensional feature space Construct a linear model in the feature space F
: ( )i iuϕ ϕ=Construct a linear model in the feature space F
, ( ) Fy uϕ= Ω
Adapt iteratively parameters with gradient information
Compute the outputiii J∇−Ω=Ω − η1
p p
Universal approximation theorem 1( ) , ( ) ( , )
im
i i F j jj
f u u a u cϕ κ=
= Ω =Universal approximation theorem
For the Gaussian kernel and a sufficient large mi, fi(u) can approximate any continuous input-output mapping arbitrarily close in the Lp norm.
j
the Lp norm.

Growing network structure
1 ( ) ( )i i ie i uη ϕ−Ω = Ω +
1
1 ( ) ( , )i i if f e i uη κ−= + ⋅ mi

Kernel Least-Mean-Square (KLMS)q ( )
Least-mean-square
Transform data into a high dimensional feature space F
011 )()()( wuwidieieuww iTiiii −− −=+= η
: ( )i iuϕ ϕ=
0
1
0( ) ( ) , ( )i i Fe i d i uϕ−
Ω == − Ω 0 0
(1) (1) ( ) (1)e d u dϕΩ =
= Ω =
1 ( ) ( )i i iu e iηϕ−Ω = Ω +
( ) ( )i
jΩ
0 1
1 0 1 1 1
1 2
(1) (1) , ( ) (1)( ) (1) ( )
(2) (2) , ( )
F
F
e d u du e a u
e d u
ϕηϕ ϕ
ϕ
= − Ω =Ω = Ω + =
= − Ω
1( ) ( )i j
j
e j uη ϕ=
Ω =( ) , ( ) ( ) ( , )
i
i i F jf u u e j u uϕ η κ= Ω =
1 1 2
1 1 2
2 1 2
(2) ( ), ( )(2) ( , )
( ) (2)
Fd a u ud a u u
u e
ϕ ϕκ
ηϕ
= − = −
Ω = Ω +
RBF Centers are the samples, and Weights are the errors!1
( ) , ( ) ( ) ( , )i i F jj
f jϕ η=
1 1 2 2( ) ( )
...a u a uϕ ϕ= +
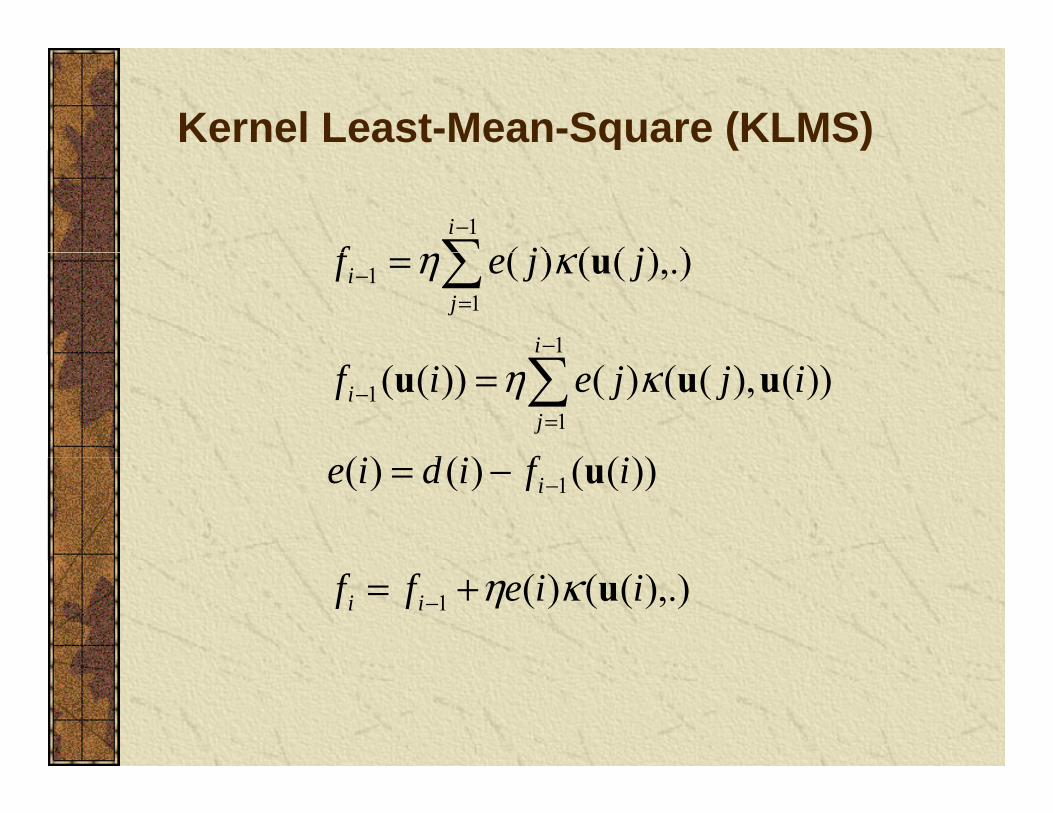
Kernel Least-Mean-Square (KLMS)( )
) )(()(1
jjfi−
),.)(()(
1
11 jjef
i
ji uκη=
−
=−
))(()()(
))(),(()())((1
1
fd
ijjeifj
i uuu κη==
− ))(()()( 1 ifidie i u−= −
),.)(()(1 iieff ii uκη+= −

Free Parameters in KLMS Initial Condition
The initialization gives the minimum possible 00 =Ω
Initial Condition
norm solution.
1
mi n nn
c P=
Ω =4
51n
3
4
1 ... 00
kς ςς ς
≥ ≥ >
2 2 2|| || || || || ||k mi c cΩ = + 1
21 ... 0k mς ς+ = = =
1 1|| || || || || ||i n nn n k
c c= = +
Ω +
0 2 4-1
0
0 2 4Liu W., Pokarel P., Principe J., “The Kernel LMS Algorithm”, IEEE Trans. Signal Processing, Vol 56, # 2, 543 – 554, 2008.

Free Parameters in KLMS Step size
T diti l i d i LMS till li hTraditional wisdom in LMS still applies here.
NN
=
=< N
jjj
Ntr
N
1))(),((][ uuG κ
ηϕ
where is the Gram matrix, and N its dimensionality.For translation invariant kernels, κ(u(j),u(j))=g0, is a
ϕG
constant independent of the data. The misadjustment is therefore ][
2 ϕη GtrN
M =

Free Parameters in KLMS Rule of Thumb for h
Although KLMS is not kernel density estimation, these rules of thumb still provide a starting point. Silverman’s rule can be applied
where σ is the input data s d R is the interquartile N{ } )5/(134.1/,min06.1 LNRh −= σ
where σ is the input data s.d., R is the interquartile, N is the number of samples and L is the dimension.Alternatively: take a look at the dynamic range of the y y gdata, assume it uniformly distributed and select h to put 10 samples in 3 σ.Use cross validation for more accurate estimationUse cross validation for more accurate estimation

Free Parameters in KLMSKernel DesignThe Kernel defines the inner product in RKHSThe Kernel defines the inner product in RKHS
Any positive definite function (Gaussian, polynomial, Laplacian, etc.) can be used. A strictly positive definite function will always yield universal mappers (Gaussian, Laplacian). For infinite number of samples all spd kernelsFor infinite number of samples all spd kernels converge in the mean to the same solution.For finite number of samples kernel function and free pparameters matter.
See Sriperumbudur et al, On the Relation Between Universality, Characteristic Kernels and RKHS Embedding ofMeasures, AISTATS 2010
SparsificationSparsification
Filter size increases linearly with samples!Filter size increases linearly with samples! If RKHS is compact and the environment stationary, we see that there is no need to keep increasing the p gfilter size.Issue is that we would like to implement it on-line! Two ways to cope with growth:
Novelty Criterion (NC)Approximate Linear Dependency (ALD)Approximate Linear Dependency (ALD)
NC is very simple and intuitive to implement.
SparsificationNovelty Criterion (NC)Novelty Criterion (NC)
Present dictionary is When a new data{ } imciC )(Present dictionary is . When a new data pair arrives (u(i+1),d(i+1)).First compute the distance to the present dictionary
{ } i
jjciC1
)(=
=
p p y
If smaller than threshold δ1 do not create new centerjCc
ciudisj
−+=∈
)1(min
Otherwise check if the prediction error is larger than δ2 to augment the dictionary. δ1 0 1 kernel size and δ2 sqrt of MSEδ1 ~ 0.1 kernel size and δ2 ~ sqrt of MSE
SparsificationApproximate Linear Dependency (ALD)Approximate Linear Dependency (ALD)
Engel proposed to estimate the distance to the linearEngel proposed to estimate the distance to the linear span of the centers, i.e. compute
)())1((min jC j cbiudis −+= ϕϕWhich can be estimated by
)())(( jCc jb j ∈∨
ϕϕ
)1()()1())1(),1(( 12 ++−++= − iiiiidis T hGhuuκ
Only increase dictionary if dis larger than thresholdComplexity is O(m2)E t ti t i KRLS (di (i 1))Easy to estimate in KRLS (dis~r(i+1))Can simplify the sum to the nearest center, and it defaults to NCdefaults to NC
)())1((min, jCcb
ciudisj
ϕϕ −+=∈∨

KLMS- Mackey-Glass Predictiony30
)(1)(2.0)(1.0)( 10 =
−+−+−= τττ
txtxtxtx
LMSη=0.2KLMSh=1, η=0.2

Performance Growth Trade-off
δ1=0.1, δ2=0.05η=0.1, h=1η

KLMS- Nonlinear Channel Equalization
( ) , ( ) ( ) ( , )i
i i F jf u u e j u uϕ η κ= Ω =1j =
10.5t t tz s s −= + 20.9t t tr z z nσ= − +
i ic u←( )
mi i
mi
c ua e iη
←←

Nonlinear Channel EqualizationAlgorithms Linear LMS (η=0.005) KLMS (η=0.1)
(NO REGULARIZATION)RN
(REGULARIZED λ=1)
BER (σ = 1) 0 162±0 014 0 020±0 012 0 008±0 001BER (σ = .1) 0.162±0.014 0.020±0.012 0.008±0.001
BER (σ = .4) 0.177±0.012 0.058±0.008 0.046±0.003BER (σ = .8) 0.218±0.012 0.130±0.010 0.118±0.004
Algorithms Linear LMS KLMS RN
2( , ) exp( 0.1 || || )i j i ju u u uκ = − −
Computation (training) O(l) O(i) O(i3)
Memory (training) O(l) O(i) O(i2)
Computation (test) O(l) O(i) O(i)
Memory (test) O(l) O(i) O(i)
S?Why don’t we need to explicitly regularize the KLMS?

Self-Regularization Property of KLMSg p y
Assume the data model then for any unknown vector the following inequality holds
( ) ( ) ( )oid i v iϕ= Ω +
0Ωunknown vector the following inequality holds2
111 2 2
| ( ) ( ) |1, 1,2,...,
|| || | ( ) |
i
jio
e j v jfor all i N
jη=
−−
−< =
Ω +
Ω
as long as the matrix is positive definite. SoH∞ robustness
1|| || | ( ) |o
jv jη
=Ω +
})()({ 1 TiiI ϕϕη −−
H robustness
And is upper bounded
2 1 2 2|| || || || 2 || ||oe vη−< Ω +
)(nΩAnd is upper bounded
Th l ti f KLMS i l b d d i
2 2 21|| || (|| || 2 || || )o
N vσ η ηΩ < Ω + σ1 is the largest eigenvalue of Gφ
)(nΩ
The solution norm of KLMS is always upper bounded i.e. the algorithm is well posed in the sense of Hadamard.
Liu W., Pokarel P., Principe J., “The Kernel LMS Algorithm”, IEEE Trans. Signal Processing, Vol 56, # 2, 543 – 554, 2008.

Intuition: KLMS and the Data SpacepKLMS search is insensitive to the 0-eigenvalue directions
)0()1()]([ iiE εηςε −= )0()1()]([ nnn iE εηςε2 2 2min min
0[| ( ) | ] (1 ) (| ( ) | )2 2
ii n
n n
J JE n n
η ηε ης εης ης
= + − −− −
22 )()(So if , and The 0-eigenvalue directions do not affect the MSE
2( ) [| | ]TJ i E d ϕ= − Ω
0nς = )0()]([ nn iE εε = 22 )0(])([ nn iE εε =
2 2min minmin 1 1
( ) (| (0) | )(1 )2 2
m m in n n nn n
J JJ i J
η ης ς ε ης= =
= + + − −
( ) [| | ]iJ i E d ϕ= Ω
KLMS only finds solutions on the data subspace! It does not care about the null space!
Liu W., Pokarel P., Principe J., “The Kernel LMS Algorithm”, IEEE Trans. Signal Processing, Vol 56, # 2, 543 – 554, 2008.

Tikhonov Regularization
In numerical analysis the methodology constrains the condition number of the solution matrix (or its eigenvalues)
1 2{ , ,..., }rS diag s s s=Singular value
The singular value decomposition of Φ can be written
TQS
PΦ
=
000
g
The pseudo inverse to estimate Ω in is
which can be still ill posed (very small sr) Tikhonov regularized the
00)()()( 0 iiid T νϕ +Ω=
dQP TrPI ssdiag ]0....0,,...,[ 11
1−−=Ω
s s
which can be still ill-posed (very small sr). Tikhonov regularized the least square solution to penalize the solution norm to yield
2d Ω+Ω−=Ω λTJ Φ)(1
2 21
( ,..., ,0,...,0) Tr
r
s sPdiag Q d
s sλ λΩ =
+ +Notice that if λ = 0, when sr is very small, sr/(sr
2+ λ) = 1/sr → ∞., r y , r ( r ) r
However if λ > 0, when sr is very small, sr/(sr2+ λ) = sr/ λ → 0.

Tikhonov and KLMS
In the worst case, substitute the optimal weight by the pseudo inverse
1
dQP Tr
ir
i ssdiagiE ]0....0,))1(1(,...,))1(1[()]([ 1111
−− −−−−=Ω ηςης
No regularization yields Tikhonov
2 2 1[ /( )]λ −
1ns −
0.6
0.8
1
unct
ion
PCA
2 2 1[ /( )]n n ns s sλ −+ ⋅1 if thn ns s− >
0
0.2
0.4
reg-
fu
KLMSTikhonovTruncated SVD
Regularization function for finite N in KLMS 0 if thns ≤
2 1N
0 0.5 1 1.5 2singular value
2 1[1 (1 / ) ]Nn ns N sη −− − ⋅
The stepsize and N control the reg-function in KLMS.
Liu W., Principe J. The Well-posedness Analysis of the Kernel Adaline, Proc WCCI, Hong-Kong, 2008

Energy Conservation Relation
Energy conservation in RKHS
The fundamental energy conservation relation holds in RKHS!
Energy conservation in RKHS
( ) ( )222 2 ( )( )( ) ( 1)
( ), ( ) ( ), ( )pa e ie ii i
i i i iκ κ+ = − + Ω Ω
u u u uF F
Upper bound on step size for mean square convergence
( ) ( )( ), ( ) ( ), ( )
2*2E
ΩF
0.012
St d t t f
2* 2vE
ησ
≤ +
Ω
F
F0.006
0.008
0.01
EM
SE
Steady-state mean square performance2
2lim ( )2
vai
E e i ηση→∞
= 0.002
0.004
simulationtheory
Chen B., Zhao S., Zhu P., Principe J. Mean Square Convergence Analysis of the Kernel Least Mean Square Algorithm, submitted to IEEE Trans. Signal Processing
2i η→∞ −0.2 0.4 0.6 0.8 1
0
stepsize η
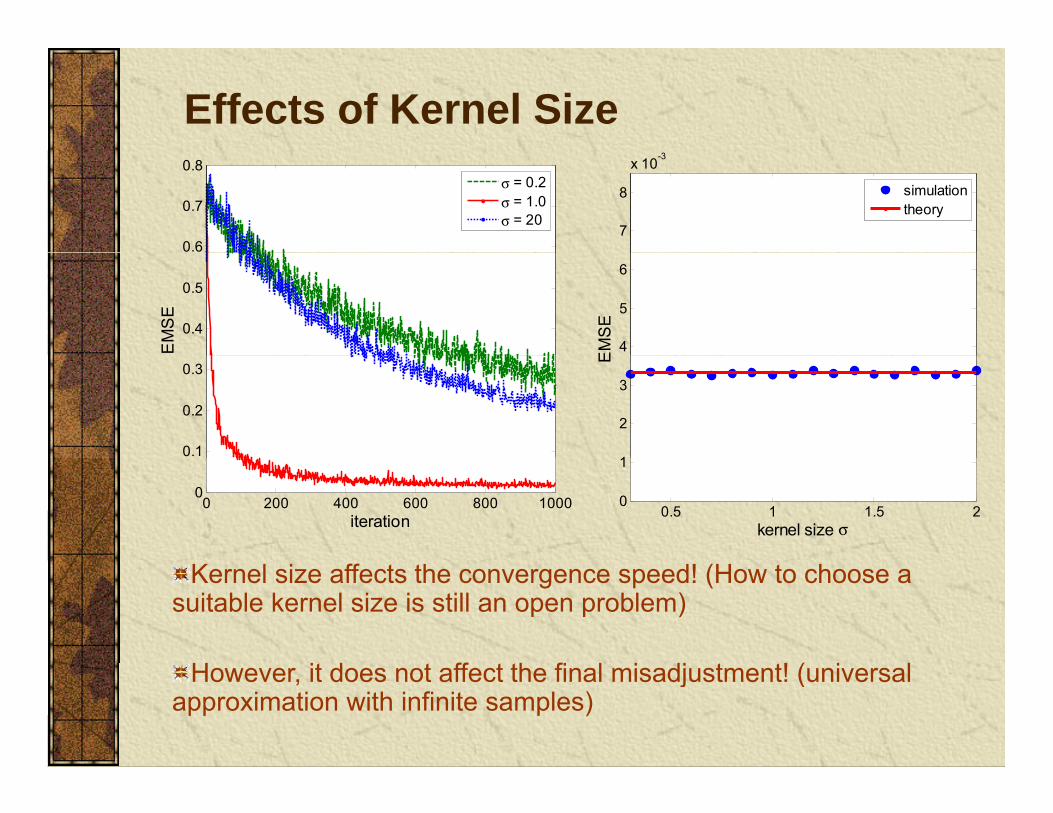
Effects of Kernel Size
7
8
x 10-3
simulationtheory
0.6
0.7
0.8
σ = 0.2σ = 1.0σ = 20
4
5
6
EM
SE0.4
0.5
EM
SE
1
2
3
E
0.1
0.2
0.3
0.5 1 1.5 20
1
kernel size σ
0 200 400 600 800 10000
iteration
Kernel size affects the convergence speed! (How to choose a suitable kernel size is still an open problem)
H i d ff h fi l i dj ! ( i lHowever, it does not affect the final misadjustment! (universal approximation with infinite samples)
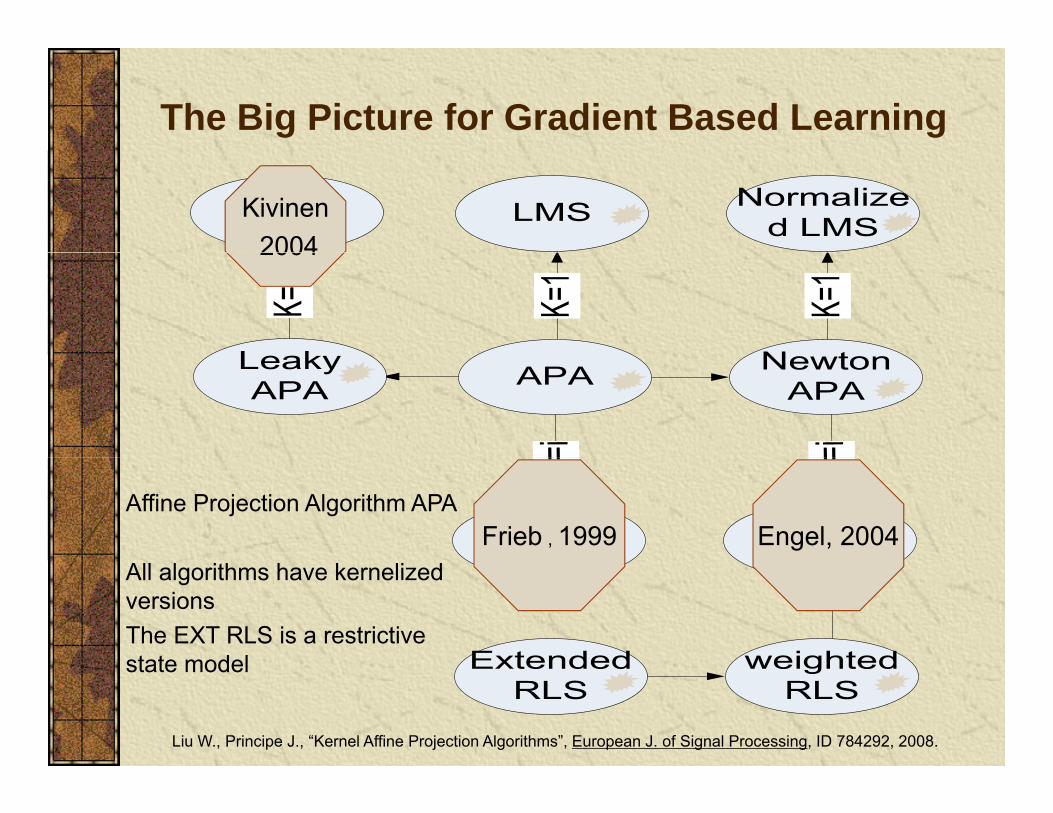
The Big Picture for Gradient Based Learning
Kivinen20042004
Frieb , 1999 Engel, 2004Affine Projection Algorithm APA
All algorithms have kernelizedversionsThe EXT RLS is a restrictive state modelstate model
Liu W., Principe J., “Kernel Affine Projection Algorithms”, European J. of Signal Processing, ID 784292, 2008.
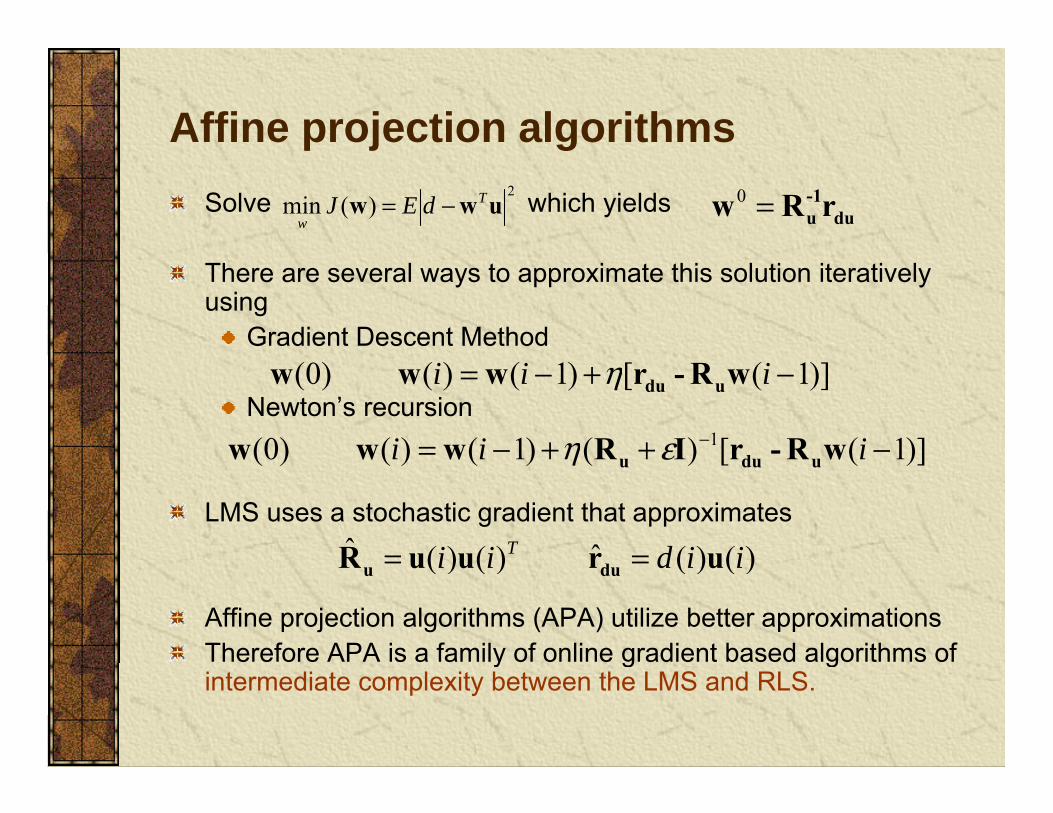
Affine projection algorithmsp j gSolve which yields 2
)(min uww T
wdEJ −= du
-1u rRw =0
There are several ways to approximate this solution iteratively using
Gradient Descent Method
Newton’s recursion )]1([)1()()0( −+−= iii wR-rwww uduη
)]1([)()1()()0( 1 −++−= − iii wR-rIRwww dεη
LMS uses a stochastic gradient that approximates
)]1([)()1()()0( ++ iii wRrIRwww uduu εη
)()(ˆ)()(ˆ iidii T uruuR ==
Affine projection algorithms (APA) utilize better approximationsTherefore APA is a family of online gradient based algorithms of
)()()()( iidii uruuR duu ==
y g gintermediate complexity between the LMS and RLS.

Affine projection algorithmsp j gAPA are of the general form
TidKidiiKii )]()1([)()]()1([)( +−=+−= duuU LxK idKidiiKii )](),...,1([)()](),...,1([)( +−=+−= duuU
)()(1ˆ)()(1ˆ iiK
iiK
T dUrUUR duu ==
Gradient
KK
)]1()()()()1()()0( −+−= iiiiii T wU-[dUwww η
Newton
Notice that)]1()()()[())()(()1()( 1 −++−= − iiiiiiii TT wU-dUIUUww εη
Notice that
So11 ))()()(()())()(( −− +=+ IUUUUIUU εε iiiiii TT
)]1()()([])()()[()1()( 1 −++−= − iiiiiiii TT wU-dIUUUww εη

Affine projection algorithmsp j gIf a regularized cost function is preferred
22)(i λTdEJ
The gradient method becomes
)(min wuww λ+−= T
wdEJ
g
)]1()()()()1()1()()0( −+−−= iiiiii T wU-[dUwww ηηλ
Newton
Or)()())()(()1()1()( 1 iiiiii T dUIUUww −++−−= εηηλ
Or
)(])()()[()1()1()( 1 iiiiii T dIUUUww −++−−= εηηλ

Kernel Affine Projection Algorithmsj g
KAPA 1 2 use the least squares cost while KAPA 3 4 are regularized
Ω≡wQ(i)
KAPA 1,2 use the least squares cost, while KAPA 3,4 are regularizedKAPA 1,3 use gradient descent and KAPA 2,4 use Newton updateNote that KAPA 4 does not require the calculation of the error by
iti th ith th t i i i l d i threwriting the error with the matrix inversion lemma and using the kernel trick
Note that one does not have access to the weights, so need recursion i KLMSas in KLMS.
Care must be taken to minimize computations.
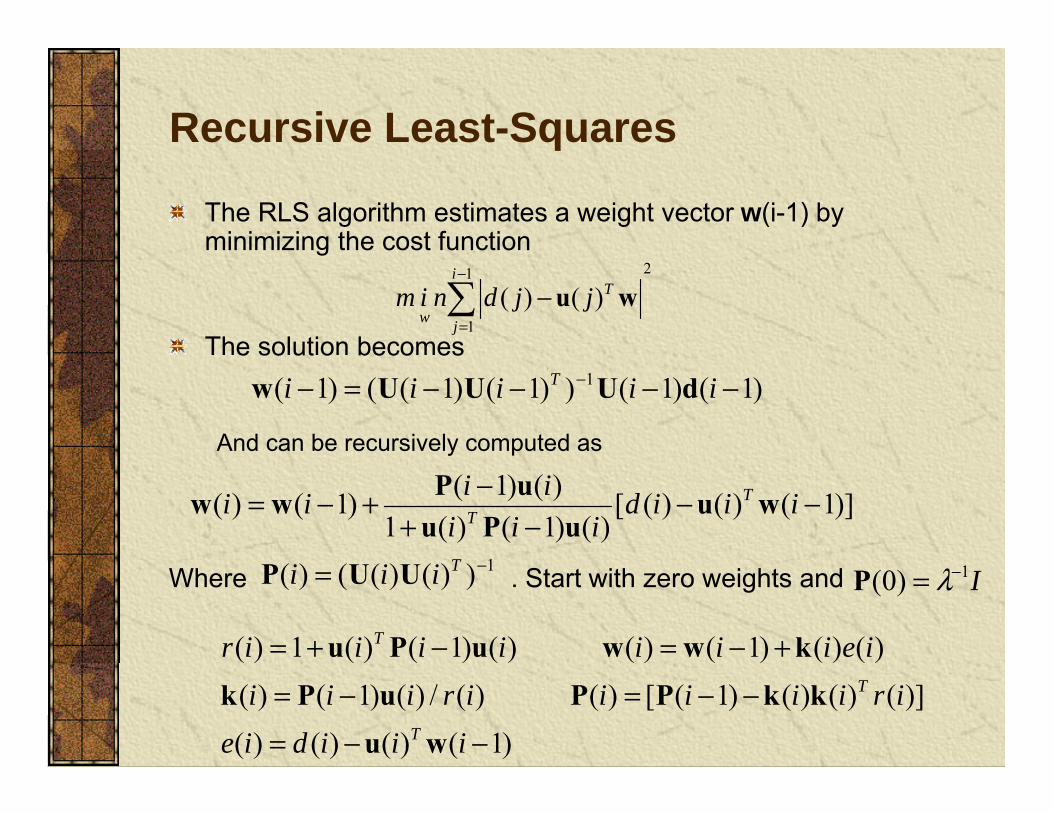
Recursive Least-Squaresq
The RLS algorithm estimates a weight vector w(i-1) by minimizing the cost functiong
The solution becomes
21
1)()(
−
=
−i
j
T
wjjdnim wu
e so ut o beco es
And can be recursively computed as
)1()1())1()1(()1( 1 −−−−=− − iiiii T dUUUw
)]1()()([)()1()(1
)()1()1()( −−−+
−+−= iiidiii
iiii TT wu
uPuuPww
1TWhere . Start with zero weights and
)()()1()()()1()(1)( +−=−+= ieiiiiiiir T kwwuPu
1))()(()( −= Tiii UUP I1)0( −= λP
)1()()()()]()()()1([)()(/)()1()(
−−=−−=−=
iiidieiriiiiiriii
T
T
wukkPPuPk
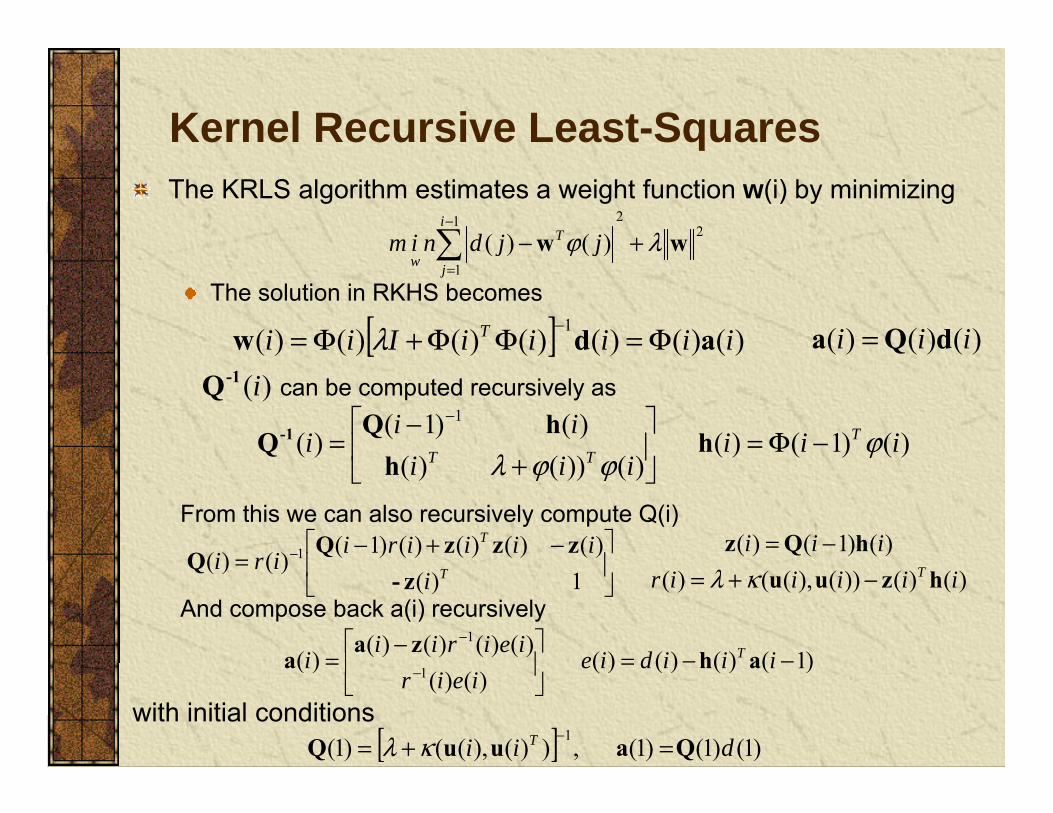
Kernel Recursive Least-SquaresqThe KRLS algorithm estimates a weight function w(i) by minimizing
221
)()( ww λϕ +−−i
T jjdnim
The solution in RKHS becomes 1
)()( ϕ=jw
jj
[ ] )()()()()()()( 1 iiiiiIii T adw Φ=ΦΦ+Φ= −λ )()()( iii dQa =can be computed recursively as
[ ] )()()()()()()()(i-1Q
)()1()()())()(
)()1()(
1
iiiiii
iii T
TTϕ
λ−Φ=
−=
−
hh
hQQ-1
From this we can also recursively compute Q(i) )()1()()()()()()1(
)()( 1 iiiiiiiriiri
T hQzzzzQQ
−=
−+−
= −
)())()( iii TT ϕϕλ
+h
And compose back a(i) recursively )()())(),(()(1)(
)()(iiiiiri
iri TT hzuuz-Q
−+=
=κλ
)1()()()()()()()(
)(1
−−=
−
=−
iiidieieirii
i T ahza
a
with initial conditions
)1()()()()()(
)( 1 =
=−
iiidieieir
i aha
[ ] )1()1()1(,))(),(()1( 1 dii T QauuQ =+= −κλ

KRLS
)()( 1 ieira
uc
mi
imi−←
←
1
)()()( 1 iieiraa jjmijmi z−−− −←
1
2
1
2
mi-1
mimi-1
mi )),(()()(1
uuau jifi
ji κ
=
=1j=
Engel Y., Mannor S., Meir R. “The kernel recursive least square algorithm”, IEEE Trans. SignalProcessing, 52 (8), 2275-2285, 2004.

KRLS
[ ] )()),(()()),(()( 1
11
1 iejiiirff i
j jii ⋅−⋅+= −
=−
− uzu κκ
)()()( 1 ieirii = −a
)}(),1({)(
1,...,1)()()()()( 1
iuiCiC
ijiieirii jjj
−=
−=−= − zaa

Computation complexityy
Prediction of Mackey GlassPrediction of Mackey-Glass
L 10L=10K=10K=50 SW KRLSK=50 SW KRLS

Simulation 1: Noise Cancellationn(i) ~ uniform [-0.5, 05]
( ) ( ) 0.2 ( 1) ( 1) ( 1) 0.1 ( 1) 0.4 ( 2)u i n i u i u i n i n i u i= − − − − − + − + −( ( ), ( 1), ( 1), ( 2))H n i n i u i u i= − − −

Simulation 1: Noise Cancellation
2( ( ) ( )) exp( || ( ) ( ) || )u i u j u i u jκ =( ( ), ( )) exp( || ( ) ( ) || )u i u j u i u jκ = − −
K=10
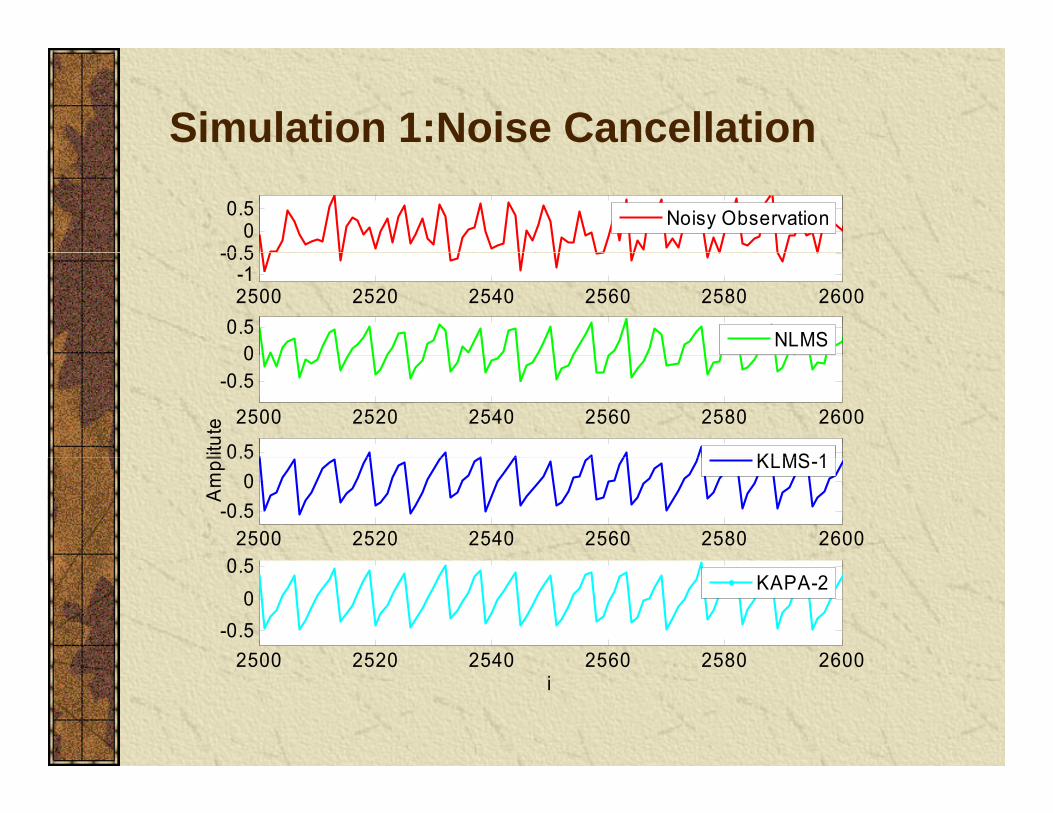
Simulation 1:Noise Cancellation
0 50
0.5
Noisy Observation
2500 2520 2540 2560 2580 2600-1
-0.5
00.5
NLMS
2500 2520 2540 2560 2580 2600
-0.50
0.5
KLMS 1litut
e
2500 2520 2540 2560 2580 2600-0.5
00.5
KLMS-1
0 5
Am
pl
2500 2520 2540 2560 2580 2600-0.5
00.5
KAPA-2
2500 2520 2540 2560 2580 2600i

Simulation-2: nonlinear channel equalization
10.5t t tz s s −= + 20.9t t tr z z nσ= − +
K=100 1σ=0.1
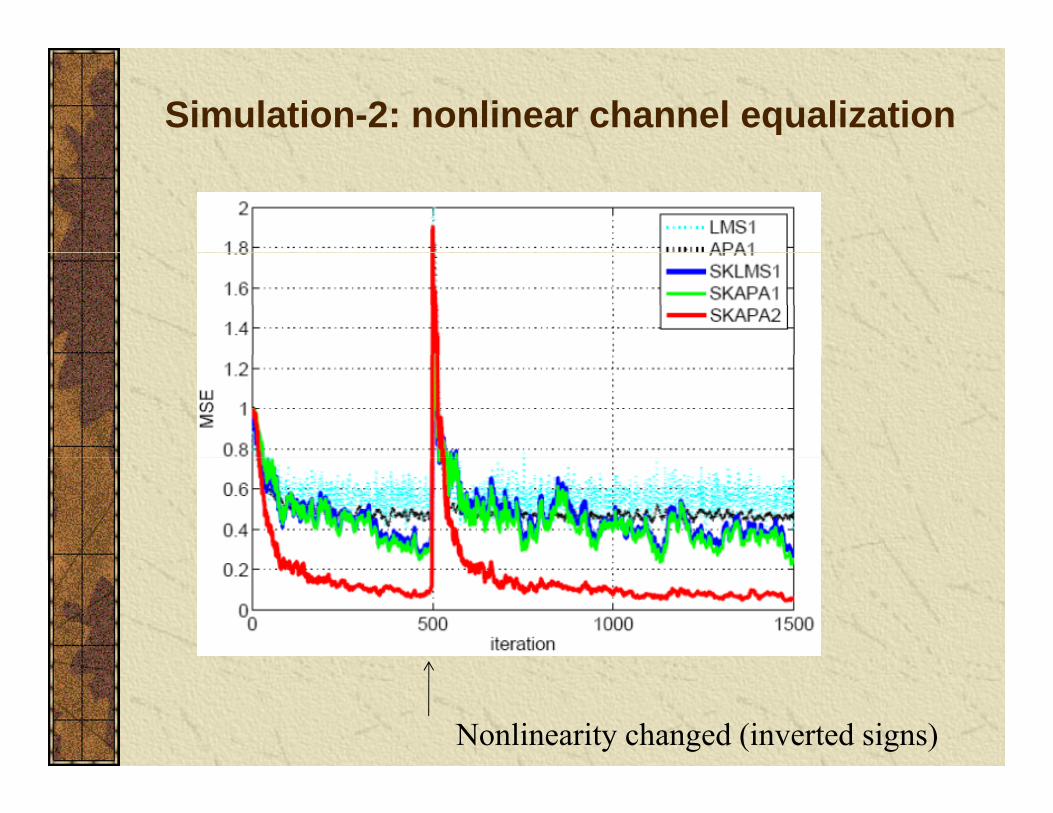
Simulation-2: nonlinear channel equalization
Nonlinearity changed (inverted signs)

Active Data Selection
Is the Kernel trick a “free lunch”?Is the Kernel trick a free lunch ?
The price we pay is large memory to store centers P i t i l ti f th f tiPointwise evaluations of the function
But remember we are working on an on-line scenario, so most of the methods out there need to be modified.

Active Data Selection
The goal is to build a constant length (fixed budget)The goal is to build a constant length (fixed budget) filter in RKHS. There are two complementary methods of achieving this goal:
Discard unimportant centers (pruning)Accept only some of the new centers (sparsification)
Apart from heuristics, in either case a methodology to evaluate the importance of the centers for the overall pnonlinear function approximation is needed.Another requirement is that this evaluation should be no more expensive computationally than the filterno more expensive computationally than the filter adaptation.

Previous Approaches – Sparsificationpp pNovelty condition (Platt, 1991)
• Compute the distance to the current dictionaryCompute the distance to the current dictionary
• If it is less than a threshold δ1 discardIf the prediction error
jiDcciudis
j
−+=∈
)1(min)(
• If the prediction error
• Is larger than another threshold δ2 include new center. )()1()1()1( iiidie T Ω+−+=+ ϕ
Approximate linear dependency (Engel, 2004)• If the new input is a linear combination of the previous
centers discardcenters discard
which is the Schur Complement of Gram matrix and fits KAPA 2 d 4 ll P bl i t ti l l it
∈−+=
)(2 )()1((miniDc jj
jcbiudis ϕϕ
and 4 very well. Problem is computational complexity

Previous Approaches – Pruningpp gSliding Window (Vaerenbergh, 2010)
Impose mi<B in =im
jji ciaf )()( κImpose mi<B in Create the Gram matrix of size B+1 recursively from size B
=+)(
)1(hiG
iG
=j
jji ciaf1
,.)()( κ
[ ]TBBB cccch ),(),...,,( 111 ++= κκ
=+++ ),(
)1(11 BB
T cchiG
κhzccrhiQziGIiQ T
BB −+==+= ++− ),()())(()( 11
1 κλλ +iQ T //)(
Downsize: reorder centers and include last (see KAPA2)
−−+
=+rrzrzrzziQ
iQ T
T
/1///)(
)1(
See also the Forgetron and the Projectron that provide error bounds for the approximation
=+ +=++=+−=+ B
j jjiT ciafidiQiaeffHiQ
11 ,.)()1()1()1()1(/)1( κ
error bounds for the approximation. O. Dekel, S. Shalev-Shwartz, and Y. Singer, “The Forgetron: A kernel-based perceptron on a fixed budget,” in Advancesin Neural Information Processing Systems 18. Cambridge, MA: MIT Press, 2006, pp. 1342–1372.F. Orabona, J. Keshet, and B. Caputo, “Bounded kernel-based online learning,” Journal of Machine Learning Research,vol. 10, pp. 2643–2666, 2009.

Information Theoretic Statement
Th l i t ))(( iTThe learning systemAlready processed (the dictionary)
))(;( iTuy
ijdjuiD )}()({)( =
A new data pair How much new information it contains?
jjdjuiD 1)}(),({)( ==)}1(),1({ ++ idiu
How much new information it contains?Is this the right question? NOHow much information it contains with respect to theHow much information it contains with respect to the
learning system ?))(;( iTuy

Information Measure
Hartley and Shannon’s definition of informationHow much information it contains?
))1(),1((ln)1( ++−=+ idiupiI
Learning is unlike digital communications:The machine never knows the joint distribution!
When the same message is presented to a learning system information (the degree of uncertainty) changes because the system learned with the first g ypresentation! Need to bring back MEANING into information theory!

Surprise as an Information Measurep
Learning is very much like an experiment that we do in the laboratory. Fedorov (1972) proposed to measure the importance of an experiment as the Kulback Leibler distanceof an experiment as the Kulback Leibler distance between the prior (the hypothesis we have) and the posterior (the results after measurement).Mackay (1992) formulated this concept under a Bayesian approach and it has become one of the key concepts in active learningconcepts in active learning.
Surprise as an Information Measurep
))(log()( xqxIS −=
))(;( iTuy
))(|)1((ln)1())1(()( iTiupiCIiuS iT +−=+=+

Shannon versus Surprise
Shannon SurpriseShannon (absolute
information)
Surprise (conditional information)
Objective Subjective
Receptorindependent
Receptor dependent (on time
and agent)g )Message is
meaninglessMessage has
meaning for the agentagent

Evaluation of Conditional Information (surprise)
Gaussian process theoryGaussian process theory
))1(ˆ)1((
))](|)1(),1((ln[)1(2idid
iTidipiCI
++
=++−=+ u
where
))](|)1((ln[)1(2
))1()1(()1(ln2ln 2 iTipi
ididi +−+
+−++++ uσ
σπ
)()]([)1()1(ˆ1222
12 ++=+ − idiiidT
nT GIh σ
)1()]([)1())1(),1(()1( 1222 +++−+++=+ − iiiiii nT
n hGIhuu σκσσ

Interpretation of Conditional Information (surprise)(surprise)
ˆ))](|)1(),1((ln[)1(
2
iTidipiCI =++−=+ u
))](|)1((ln[)1(2
))1(ˆ)1(()1(ln2ln 2
2
iTipi
ididi +−+
+−++++ uσ
σπ
Prediction errorLarge error large conditional information
Prediction variance
)1(ˆ)1()1( +−+=+ ididie
)1(2 +iσPrediction varianceSmall error, large variance large CILarge error, small variance large CI (abnormal)
I t di t ib ti
)1( +iσ
))(|)1(( iTip +uInput distributionRare occurrence large CI
))(|)1(( iTip +u

Redundant, abnormal and learnable
1)1(: TiSAbnormal >+ 1
)1(
)(
TiSTL bl ≥≥ 21 )1(: TiSTLearnable ≥+≥
2)1(:Re TiSdundant <+
Still need to find a systematic way to select these thresholds which are hyperparameters.

Simulation-5: KRLS-SC nonlinear regression
Nonlinear mapping is y=-x+2x2+sin x in unit variance Gaussian noise

Simulation-5: nonlinear regression–5% most surprising data5% most surprising data

Simulation-5: nonlinear regression—redundancy removal

Simulation-5: nonlinear regressiong

Simulation-6: nonlinear regression—abnormality detection (15 outliers)
KRLS-SC

Simulation-7: Mackey-Glass time series prediction

Simulation-8: CO2 concentration forecasting
Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
A common drawback of sparsification methods: the redundant input data are purely discarded!The redundant data are very useful to update the coefficients of the current network (not so important forcoefficients of the current network (not so important for structure updating). Quantization approach: if the current quantized input has already been assigned a center we don’t need tohas already been assigned a center, we don t need to add a new center, but update the coefficient of that center with the new information!I t iti l th ffi i t d t i ld b ttIntuitively, the coefficient update may yield better accuracy and therefore a more compact network.
Chen B., Zhao S., Zhu P., Principe J. Quantized Kernel Least Mean Square Algorithm, submitted to IEEE Trans. Neural Networks

Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
Quantization in Input Space 0 0f =p p
[ ]( )1
1
( ) ( ) ( ( ))
( ) ( ) ,i
i i
e i d i f i
f f e i Q iη κ−
−
= − = +
u
u .
Quantization in RKHS (0) =
0Ω
[ ]( ) ( ) ( 1) ( )( ) ( 1) ( ) ( )
Te i d i i ii i e i iη
= − − = − +
ΩΩ Ω
ϕϕQ
Using the quantization method to
compress the input (or feature) space
[ ]( ) ( ) ( ) ( )η ϕ
and hence to compact the RBFstructure of the kernel adaptive filter
Quantization operator
Quantized Kernel Least Mean Squareq
M t f th i ti VQ l ith t it bl fMost of the existing VQ algorithms are not suitable for online implementation because the codebook must be supplied in advance (which is usually achieved offline), and the computational burden is rather heavy. A simple online VQ method:
1 Compute the distance between u(i) and C(i 1)1. Compute the distance between u(i) and C(i-1)
2. If keep the codebook unchanged, and quantize ( )
( )1 ( 1)( ), ( 1) min ( ) ( 1)jj size i
dis i i i i≤ ≤ −
− = − −u uC
C C
( )( ), ( 1)dis i i ε− ≤u UC
u(i) to the closest code-vector by 3. Otherwise, update the codebook: , and do not
quantize u(i). { }( ) ( 1), ( )i i i= − uC C
* *( ) ( 1) ( )j j
i i e iη= − +a a
Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
Quantized Energy Conservation Relationgy
( ) ( )222 2
2 2
( )( )( ) ( 1)( ), ( ) ( ), ( )
paq
q q
e ie ii ii i i i
βκ κ
+ = − + + Ω Ωu u u uF F
A Sufficient Condition for Mean Square Convergence ( ) ( 1) ( ) 0 ( 1)TE e i i i C − >
Ω ϕ
2 2
( ) ( 1) ( ) 0 ( 1)
, 2 ( ) ( 1) ( )0 ( 2)
( )
a q
Ta q
a v
E e i i i C
i E e i i iC
E e iη
σ
> ∀ − < ≤ +
Ω
Ω
ϕ
ϕ
Steady-state Mean Square Performance
2 22max ,0 lim ( )
2 2v v
aiE e iγ γησ ξ ησ ξ
η η→∞
− + ≤ ≤ − −
2 2

Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
Static Function Estimation2 2( ( ) 1) ( ( ) 1)( ) 0.2 exp exp ( )
2 2u i u id i v i
+ −= × − + − +
Upper bound 30
40
10-1
EM
SE
pp
20
netw
ork
size
EMSE = 0.017110
final
n
10-2 10-1 100 10110-2
quantization factor γ
Lower bound
2 4 6 8 100.10
quantization factor γ

Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
Short Term Lorenz Time Series Prediction
500101
QKLMS
350
400
450
e
100
SE
NC-KLMSSC-KLMS
150
200
250
300
netw
ork
siz
QKLMSNC-KLMSSC-KLMS
10-1
test
ing
MS
0 1000 2000 3000 40000
50
100
150
0 1000 2000 3000 400010-3
10-2
0 1000 2000 3000 4000iteration
0 1000 2000 3000 4000iteration

Quantized Kernel Least Mean SquareQuantized Kernel Least Mean Square
Short Term Lorenz Time Series Prediction
350
400
QKLMSNC-KLMS
101
QKLMSNC-KLMS
250
300
size
SC-KLMS
100
SE
SC-KLMSKLMS
100
150
200
netw
ork
s
-2
10-1
test
ing
M
0 1000 2000 3000 40000
50
100
0 1000 2000 3000 4000
10-3
10 2
0 1000 2000 3000 4000
iteration0 1000 2000 3000 4000
iteration

Generality of the Methods Presented
The methods presented are general tools for designingThe methods presented are general tools for designing optimal universal mappings, and they can be applied in statistical learning.g
Can we apply online kernel learning for Reinforcement learning? Definitely YES. g yCan we apply online kernel learning algorithms for classification? Definitely YES. yCan we apply online kernel learning for more abstract objects, such as point processes or graphs? Definitely j , p p g p yYES
Redefinition of On-line Kernel Learning
Notice how problem constraints affected the form of theNotice how problem constraints affected the form of the learning algorithms.
On-line Learning: A process by which the freeOn line Learning: A process by which the free parameters and the topology of a ‘learning system’ are adapted through a process of stimulation by the p g p yenvironment in which the system is embedded.
Error-correction learning + memory-based learningg y gWhat an interesting (biological plausible?) combination.

Impacts on Machine Learning
KAPA algorithms can be very useful in large scale g y glearning problems.
Just sample randomly the data from the data base and p yapply on-line learning algorithms
There is an extra optimization error associated with pthese methods, but they can be easily fit to the machine contraints (memory, FLOPS) or the processing time constraints (best solution in x seconds).





























