Embed Size (px)
Citation preview
.---~~~~~~~~~~~~--~--
,I
R, 121 Philips Res. Rep. '~, '375-400, 1949,
ON,'HIGHLY COMPRESSIBLE HELICAL SPRINGSAND RUBBER RODS, AND THEIR APPLICATION
FOR VIBRATION-FREE MOUNTINGS, V *,)
by J. A. HARINGX 531.2 :621-272.2 :621.272.6
Summary
This paper, the fifth of a series of six, deals with the behaviour inspaee of the different types of vibration-free mounting, starting fromthe simple construction of a resiliently supported body up to thedamped dynamic vibration absorber provided with an auxiliary mass. ', In order to simplify the problems of forced and free vibrations it isaimed at splitting up.themovements in space into a number of one-and two-dimensional movementsto be' treated independently. In thisconnection it appears to be necessary to confine our considerationsto constructions where the spring and damping systems show somespecial properties with regard to their so-called principal axes ofelasticity and of damping. These systems of principal axes, whichexist in each two-dimensional case, only exceptionally occur in space.The respective requirements can best be met by introducing in theconstruction a certain, degree of symmetry, as is elucidated for thetwo- and the three-dimensional case separately.
Résumé
Cet article, le cinquième d'une sêrie de six, dëcrit le oomportementdans l'espace des diffërents types de montages insensibles auxvibrations, depuis la construction simple d'une masse montéeëlastiqucment jusqu' à I'amortisseur dynamique muni d'une masseauxiliaire. Pour simplifier les problèmes des vibrations libre;' etforcëes, on a cherchë à décomposer les mouvements dans l'espace· en un certain nombre de mouvements uni- et bidimensionnels, quipeuvent être traitës sëparément. A eet effet, il devient nëcessairede se limiter à l'examen de constructions oü les systémes de ressortset d'amortissement prësentent certaines propriëtës particulières, ence qui concerne les "axes principaux" d'élasticité et d'amortissement.Ces systémes d'axes prineipaux, qui existent dans tous les cas bi-dimensionnels, ne se présentent qu'exceptionellement dans l'espace.
· La meilleure façon de satisfaire aux conditions imposëes est· d'introduire dans la construction un certain degré de symétrie,comme ceci est montré séparément pour les cas bi- et tridimensionnels.
'.
"
*) This is the fifth of a series.of six papers to be published in these Reports and comprisingan unabridged translation of the author's thesis (Delft, December 1947), which wasapproved by ,Prof. Dr Ir C. B. Biezeno, professor of applied mechanics at the Tech-nical University of Delft, Netherlands. For the preceding papers see: Philips ResearchReports 3, 401-44,9,1948; 4, 49-80, 1949; 4, 206-22~, 1949; 4, 261-290, 1949.
376 J. A. HARINGX
CHAPTER Ill. VIBRATION-FREE MOUNTINGS
PART B. MULTI-DIMENSIONALVIBRATION-FREE MOUNTINGS
6. The undamped two-dimensional resilient mounting without auxiliary mass
So fai: we have been dealing only with the one-dimensional problem ofvibration-free mountings: As a rule, however, the foundation of an instru-ment is apt to Vibrate along and about several directions, and in ~anycases the instrument is sensitive to all possible displacements. Therefore,in regard to the forced vibrations the instrument should be mountedresiliently in various directions. However, if this is done in. an arbitrary
. manner as regards the points of application and the directions of the springforces, there is every risk that the apparatus will make such complicatedand absolutely unsurveyahle oscillations that it will be impossible todecide what steps have to he taken to ensure a satisfactory decay of the _free vibrations after an impulse or .an initial displacement. We mustthereforezinvestigate the conditions which the resilient support of a bodyshould meet to simplify the solution of our vibration problem. We shallbegin by first studying the two-dimensional problem, and shall thereuponreturn tI? the three-dimensional problem in section 8: -. .
A body resiliently supported in such a way that it can only move in the,ve~tical plane possesses three degrees of freedom. S~ce ",ve'aim at the,'study of vibration phenomena, it will be natural to consider all translationsand rotations of the body with respect to its position of equilibrium,which is brought about by the system of forces that is permanently present, -
. i:e.,. the weight and the corresponding spring reactions. In this state ofequilibrium a system ofaxes 0*y*Z*· bound to the'_body may coincidewith the sys~em ofaxes 0' Y' Z' fixed in space. If m: the state of equilibrium .the weight acting upon the body as well as the system of, forces acting.upo~ the. springs [the. pre-Ioading of the. spring system) are reduced tothe point 0* coinciding with 0', then the two reduced systems of forces-here represented symbolically by [RJ and [R2] -are naturallyidentical. ,
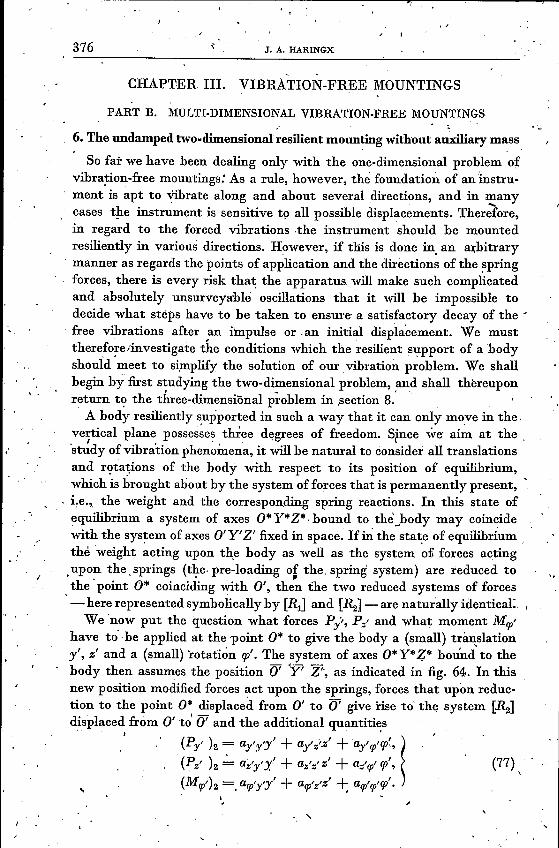
We now put the question what forces Pyi, Pz' and what moment Mqlhave to' -he applied at the point 0* to give the body a (small) translationy', z' and a (small) rotatión tp", The system ofaxes O*y*z* bound to thebody then assumes the position 0' -y Z", as indicated in fig. 64. In thisnew position modified forces s= upon the springs, forces that upon reduc-tion to the point 0* displaced from 0' to 0' give rise to the system [R21displaced from 0' to' 0' and the additional quantities
. , (Py' )2 = ay'y'Y' + ay'z'.z' + 'ay'rp'~~' !(Pz' )2 . Uz'y'y' + az'z'z' + az'rp'ep', (77)
, (Mrp')2 =,arp'y'Y' + aq;'z'z' + arp'rp'ep'.
"
'_. "

" ..HELICAL SPRINGS, RUBBER RODS AND VIBRATION-FREE MOUNTINGS 377
I ,
.' Here the inB.uence coefficient Uij=aji (theorem of Maxwell) are determinedexclusively, by the instantaneous elastic properties of the springs and are'
- therefore dependent upon the' pre-Ioading of' the spring system.
, 58925/
_l,i'ig.64. A two-dimensional spring-supported body under the influence of a small externalload.. '
\ ,
Further, the weight mg of the body reduced to 0' gives rise to the system[RJ displaced from 0' to 0' and the additional moment (Mrp'h = -,.,ightep',where h; is the height of the centre of gravity above the origin 0* of the _system of' axes O*Y*Z* bound to the body. The extra load Py', Pz' a~dMrp' to, be applied at 0', together with the extra moment mgh; rp', n;lU~t,now yield the system (77), so that ' ,
,
" I
P '+ "+ " 'l'y' = ay'Y,'Y "a_y'z'z ay'rp'ep ,P:r' _= az'y' y' + az' z' z' + az'rp' ep',Mrp' = arp'y'Y' + arp'z'z' + (arp'rp' ----,mgh;)ep'.
(78) .
- . ,The influence coefficients aij generallyall differ from zero. By a partic-
ular choice of the system ofaxes 0* y* Z*, however, it is possible tom~ke all coefficients ai} (i::/=j) assume the value zero, so that only one termwill occur in the r~ght-hand member. of each of the three equations (77):This particular system ofaxes OYZ ,is called the principal system of axesof the spring system; its origin is the centre of elasticity and its axes arethe prineipal axes of elasticity. Thus, by d~finition, a force acting along .one ofthe principal axes will only give rise to a translation in its own 'direction; à moment Will only cause a rotation about the centre of elas-,ti city.
With respect to the principal system ofaxes eqs (77) assume the foll~w-ing form '
(Pyh = áyyY , . (79) .
Equ,ations (78)' are to be simplified accordingly.
/
378 J. A •. HARINGX
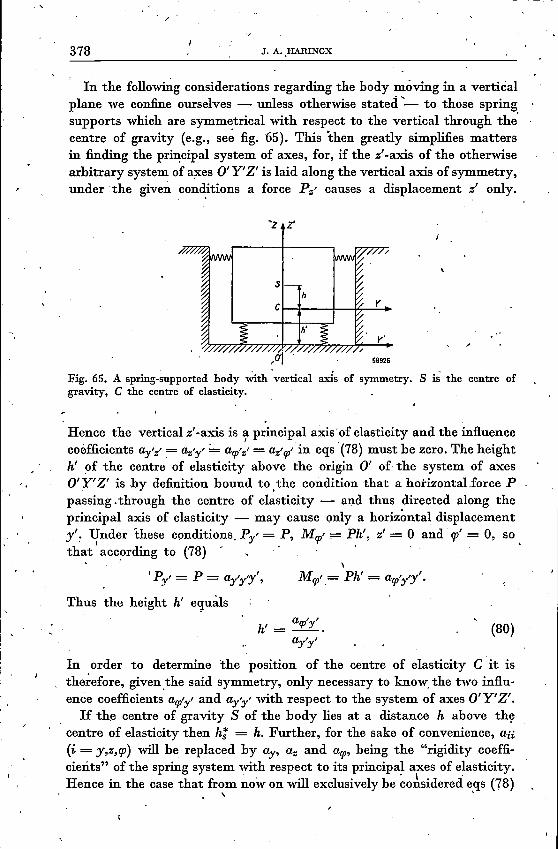
In the following considerations regarding the body moving in a verticalplane we confine ourselves - unless otherwise stated .._ to those springsupports which are symmetrical with respect to the vertical through the'centre of gravity (e.g., se~ fig. 65). This then greatly simplifies mattersin finding the principal system ofaxes, for, if the z'-axis of the otherwisearbitrary system of axes 0' Y'Z' is laid along the vertical axis of symmetry,under· the given conditions a force Pz' causes a displacement z' only.
"z Z'
56926
Fig. 65. A spring-supported body With vertical axis of symmetry. S is the centre ofgravity, C the centre of elasticity.
Hence the vertical z' -axis is a principal axis' of elasticity and the influence" . ,
. coefficients ay'z' = az'y" arp'z'= az'rp' in eqs (78) must be zero. The heighth' of the centre of elasticity above the origin 0' of the system ofaxes0'Y' Z' is by definition bound to. the condition that a horizontalforce Ppassing. through the centre of elasticity - and thus directed along theprincipal axis of elasticity - may cause only a horizontal displacementy': l[nder these conditions, Py' = P, Mrp';::= Ph', z' = 0 and rp' = 0, sothat according to (78)' • . . . .
I Py' = P= ay'y'y',
Thus the height h' equals
,Mrp'.= Ph' = arp'y'y'.
, arp'y'h=-.ay'y'
(80)
In order to determine the position of the centre of elasticity C it istherefore, given .the said symmetry, only necessary to know, the two influ-ence coefficients arp'y' and ay'y' with respect to the system ofaxes O'Y'Z'.If the centre of gravity S of the body lies at a distance h above the
centre of elasticity then ht = h. Further, for the sake of convenience, aii(i = y,z,rp) will be replaced by ay, az and arp' being the "rigidity.coeffi-cients" of the spring system with respect to its principal axes of elasticity.Hence in the case that from now on will exclusively be ~0~5idered eqs (78), .

\ .HELICAL SPRIN~S! RUBBER RODS AND VIBRATION-FREE. MOUNTINGS 379 .
-I yield for' the forces that hive to be applied at the centre of elasticity tobring about the displacement y,z,cp . l:
Py = Ilyy, Mlp , (a~ - mgh)cp.
From these equations it is to be deduced how high the centre of gravitymay lie above the centre of elasticity without causing instability of themounting. In view of tJJ.Ïspossible instability the influence coefficientsmust always be positive, and this leads to t-qe'condition
We shall now proceed to derive the equations of motion by makinguse of the theorem that in its instantaneous position the body can bekept in equilibrium if not only the extérnal forces are caused to act uponit but also the (sign-inverted) inertia forcea.Tïenoting by I the moment of',inertia of.the body about the axis through its centre of gravity S (fig.65),the components PY' P; ~nd M~ of the inertia forces with respect tothe 'system ofaxes of y, z amount to .
Py= -m(y + hëp), P~= -m z, M~ .:_-(I + mh2) ëp- mhy. (83)
In eqs (83), 1+ mh2 represents rhe moment of inertia of the body aboutthe axis through the centre of elasticity. Denoting this moment of inertiaby IIp and repla,cing in ~qs (81) P; by Py + PY' r, by ~z + P;, and Mlpby. Mlp + M~, we obtain, in connection with (83), for the equationsof motion, when written in the form of equations of equilihrium,
Py -m(y + hëp)= IlyY, lPz -mz'= azz, .Mlp - Ilpip - mhy = (alp - mgh) cp •
He~e' Py, ['z, Mlp again represent the external forces exerted at the centreof elasticity. It is' clear that if the centre of gravity coincides with the
, .centre of elasticity, and thus h = 0, matters àre greatly .simplified. Then
and the two-dim~nsional problem resolves itself into three one-dimensionalproblems which can be solved mdependently of one another.
So far we have tacitly assumed that the spring construction is rigidlyfixed in space: The object of our investigation, however, is to find out howthe resiliently supported body reacts to any displacement of its foundation.The reaction forces of the resilient elements, being proportional to' the, .rigidity coefficients ai(i = y,z,cp), are determined. by the relative displace-ments of the two ends of the springs_, provided the pre-Ioa?ing of the
(8i)
(82)
(84)

J.
I,
380 J. A. HARINGX
spring system remains the same and follows the movement of the foun-dation, If we refer the position of the foundation to the same system ofaxes of y, z with respect to which' the position of the body is considered,and indicate the translations by Yo and Zo and the rotation by CPo'then in theright-hand members of the respective equations we need only replacey by y""":" Yo' ~ by :;q - ~o and cp by cp.-: CPo" .. .Incidentally, however, the weight load remains vertically directed anddoes not rotate with the foundation like the pre-loading of the springsystem does: The angle of rotation being CPo(fig. 66), it is-only the weightcomponent mg cos CPoR::! mgwhich has actually rotated with the foundation .and which must be imagined as the force ~onstituting the pro-loading o~the spring system and determining its rigidity coefficients ai (i = y,z,cp).At the same time the weight component mg sin rpoR::! mg CPo'acting at thecentre of gravity, has. to be taken into account as an additional "external"load. Consequently the equations of motion of the body with respect tothe principal system ofaxes [cf. eq. (84)] read
.e; + mgrpo.-m(y + hip) = ay(y-Yo), . '~Pz -'mz = az (;-'zo), •
. Mp + mghrpo - Ipep - mhj = (arp - mgh) (cp'-c- CPo):,
z
Fig. '66. Effect of' gravity when the foundation of the spring-supported. body of fig. 65has rotated thro~gh an angle po'
If there is no objection in carrying out the construction in such à waythat the centr~, of gravity-coincides with the centre of elasticity (It = 0)these e.quations are reduced to
Py +'m~9'o-mY . Gy(y-. Yo),~Pz - ,mz = az(z -:So), . .Mp - Ipëp = ap(cp - CPo).,
(87)
, '..I
HEUOO SPRIN(;S, RUBBER RODS AND VIBRATION.FREE MOUNTINGS 381
7. 'The v~scously damped two-dimensional resilient mounting withoutanxiliary mass
Assuming, as is usual, that the damping has a viscous character, 'then a.linear relation exists between the components of the ,load caused hy thedamping on the 'one hand and the velocity components of the resilientlysupported body on the other. Ás' in section 6, we again employ the arbi-, trary. system .of' uxes O'Y'Z' (fig. 64) with respect to which the body
\ I undergoes a 'tra'uslation with the velocity, components Y' and z' and arotation with the angular velocity rp'. Further we shall denote the fçrces'that haye to be applied at 0' to overcome 'the damping resistances byPil pil Mil E he damni f . P'! pil Mil uall .Y' z, ,rp' .or t e ampmg orces - y', - z', - rp'.actua y actmgupon the body ~è thenha~e"":" when.introducing the influence coefficientkij ~ the -relations
, ", .Pil 1.,..' , + k ., + 'k ., t:--, y' = ''Y'y'Y, ,v'z'z y'rp'(jJ."Pil k ., + k ., + k .,
- .: , z'y'~, z'z'~, z'rp':,'(_:, Mrp'= krp'y'Y + krp'z'z' + krp'cp'(jJ .) "
, \,
(88),
. ,
We can imagine', the damping forces as ansmg due to' som~ protrusionsof th'e body, which are specially made for this purpose and move in aviscous liquid contained in a number' of receptacles rigidly connectedwith' the foundation. O~g to the symmetrical properties of the matrix ofthe system of equations which give the relation'between the load components 'and the velocity components of a body moving in a ~iscous liquid *), the 'I
influence coefficie~ts k;.j and kji (i '* j) occurring in eqs (88) are equal.'Considering the similarity between eqs (77) and eq:s (88) it, should
ágain be possible to introducé a principal system of axes OYZ such as tosimplify eqs t88) into '
I
, ,
Pil 1.,.'- y = ''YYY' Mil' k .,- rp= rprp(jJ. (89)
The Y- and z-axes (which may differ from the principal axes of elasticityintroduc~d in section 6) will be called the principal axes of damping,theorigin the centre of, damping. Provided that together with the springsupport' also the fixing of the damping elements is carri~d out' symmetricallyabout-the vertical through the centre of gravity (z'-axis;, see fig. 65),we may state that the vertical principal axis of elasticity is at the same'time a principal axis of damping. The height h" of the centre of dampingabove the' origin 0' is calcuÎated by requiring that at the centre of damping,
,by definition, only a horizo~tal damping force - pil is initiated when thebody moves with a horizontal velocity Y'. In this case z' = 0 and rp' = 0,
, , ,
.*) See e.g., H. Lamb, Hydrodynamics, Dover Publications, New York (1945), p. 569,eq. (15). ' ,

382 J. A. HARINGX
- ,
and thus according to eqs (88); where owing to the symmetry the influencecoefficients ky'z' = kz'y' and krp'z' = kz'rp' have to be taken. as zero, wehave
-M" - -P"h,l- k;« 'y"tp' - , - ,rpy .'pil pil 'k -Ór-- ,y' = - = y'y'y ,
Hence the height h" am'o,unts to. km'y'h"=_'r_.
ky'y'
(90)
,(91)
Since the principal axes of elasticity and of damping .will preferably bemad~ to coincide, we have -to meet the condition that h' = h", thus,having regard to (80) and (91), that
arp'y' _ krp'y'ay;,y' , - ky'y', .
, ,.In this particular ease kii(i = y~z,cp) occurring' in eqs (89) are replaced byky, kz and krp, being the "damping coefficients" of the system with respect toits coincident principal axes' of elasticity and of damping. We thus write
(92).
I.,
Pil k'- y,= yy, Mil k'- rp= rpep. , '(93)
If the foundation vibrates with the velocity components Yo, Zo and rPo(see section 6) the components of the load caused by the (relative) dampingare determined by the relati~e velocities 'of the body and the foundation.In this case they amount to
- p; = ky(Y-Yo), - p; = kz{.i'-zo), - M~ = krp(q;- tPo}' (94), \
Hence it follows that' the equations of motion of the body, written in theform of equations of equilibrium, read [cf. eqs (86)]
. ' /
Pr' + mgepo_:_m(y + hip.) _: ay(Y-Yo) + ky(·Y-Yo), ••Pz - mz ='az(z-zo) + kz(z-zo~,' , 'Mrp'+ mghepp - Irpip - mhy = (arp-mgh) (ep----:epo) + krp(tP:-tPo) .
(95) ,
8. The three-dimensional resilient mounting without auxiliary mass
Dealing with the three-dimensional case we shall, just as before, con- '~ider the (small) translations and rotations of the body with respect to its
. position of equilibrium, which is brought about by the system of forcespermanently present [i.e., the weight and the corresponding "spring reac-tions) and which is indicated by' the position 0'X' Y'Z' of a system of,axes 0*X* y* Z* fixed, to th~ body. In ~ manner analogous to the two-dimensionai" case discussed in section 6, the spring system reacts to atranslation x',y', z' and 'a' rotation rp',,,/, {}' of the body with an addition~l
, J

HELICAL SPRINGS, RQBBER RODS AND VIBRATION-FREE MOUNTINGS 383
system of forces which can be kept in equilibrium at the origin 0* of thesystein ofaxes 0* X* 1'."*.2* by [cf. eqs (77)]
(P x' )2 = ax' x' x~ + ax'y' y' + ax' z' z' + ax' rp'tp' + ax' 1jI'~' + ax'D',f)' ,(PY')2 ' ay'x' x' + ay'y' y' + ay'z'z' + ay'rp' cp'+ ay'v('IfJ' + Oy'{)'f}' ,(Pz' )2 = az'x' x' + az'y' y' + az'z'z' + az'rp' cp'+ aZ'1jI' 'IfJ' + az,{)'f}' ,,(Mrp')2 = arp'x'x' + arp'y'Y"+ arp'z'z' + acp'rp'cp'+ arp'1jI''IfJ'+ ~rp,{}'f}'"(M1jI'h - a1jl'X'x' + alp'y'Y' + a1jl'Z'z' + alp'rp'cp' + a1jl'1jI''IfJ'+ alp'{)'{}',
, (MD')2 , aD'x'x' +'aD'y'Y' + aD'z'z',+ aD'rp'cp'+ aD'1jI''IfJ'+ aff'D'f)'·
In these equations Uij = aji represent once more the influence coefficients •of Maxwell inherent in the spring system. , .
Here again we should like to see it' possible to give the body a system ofaxes OXYZ such as to make the influence coeffioients aij for whi~h i i::.jassume the value zero, so that only one term would occur in the rIght-handmember of each ofthe six equations (96). Since there are 150fthese influencecoefficients, this means that 15 conditions nave to be satisfied. The posi-tion of the ne,v, system ofaxes with respect to 'the original ~ne, however,is determined by. only 6 coordinates, so that in general by the choice of,these coordinates we cannot comply with more than 6 conditions, This",means that such a particular system ofaxes .ean exist only under veryspecial circumstances. If it does exist then we still speak of it as theprincipal system ofaxes of the spring system; .its origin is again called thecentre of elasticity' and its axes are the principal axes. of elasticity.The circumstances referred to may arise, for instance, when the spring
support shows symmetry with respect to two mutually perpendicularvertical planes passing through the centre of gravity (e.g., see fig. 67). Ifthese planes of symmetry are taken as being the x' z'_ and y' z' -planes of 'the otherwise arbitrary system of' axes O'X'Y'Z' then severalinfluencecoefficients Uij are zero and ~he matrix M ofthe syst.em of eqs (96) becomes
Fig. 67. Some examples of a three-dimensional spring-supported body with two mutuplyperpendicular planes of symmetry. '
z z'
x' x'
(96)
z r
~--l;]~~_ y'58928
-:
384 J. A. HARINGX
ax'x' 0 0 0 ax'tp' 00 ay'y'. 0 , ay'rp' 0 0
M= 0 0 .az'z' 0 0 0 (97)0 arp'y' 0 arp'rp' 0 0
atp'x' 0 0 0 atp'tp' 00 0 0 0 0 af}'D'
Hence the equations are reduced to
(PX'}2 = (Lx'x'X' + ax'tp''I/)',
(PY'}2 = (ty'y'Y' + ay'rp''l/,(PZ'}2 = az'z'z',
(Mrp'}2 = a·rp'y'Y' + arp'rp'f{J', l(Mtp'}2 = atp'x'x' + atp'tp''I/)',
(MD'}.2. af}'D'Oo'.
(98)
These show that 'the sp~ce problem of the displaced body consists of three.problems independent of one another, namely, those of the displacementsin the x' z' -plane, in "the y' z' -plane and about the z' -axis, ,
,I" Just as therë is absolute agreement in construction between eqs (77)• . I
and (88) in the two-dimensional case, so the linear equations giving the;elation between' the components of the damping load' and the velocitycomponents of the body in the three-dimensional case will be built up in
,. the same marmer as eqs (96)., Thus, . if the attachment of the dampingelements shows the same symmetry as the spring support, then in analogywith (98) we have the following equations for the damping forces -Pi. (i = x,y,z) and moments -MJ (j= cp,'I/),Oo)
.__:_p~, kx'x'x' + k;' tp"'P', 'PIl k ., + i: '.,- y' = y'y'Y. '''Y'rp'f{J,
-P;, = kz'z'z',
,,(99)
. As shown in sections 6 and 7, a system of principal axes of elasticity a~well a; a system of principal axes of damping can always be indicated foreach of the planés of symmetry. For reasons of symmetry the verticalz' -axis is always a principal axis of elasticity and of damping at the sametime, so that the other principal axes run parallel to t4~ horizontal x' - andy' -axes respectively:' The various centres of elasticity and of damping willcoincide if [cf. eq. (92)]
atp'x' _ arp'y' _ kIP,x' .:._'krp'y' , .ax'x' - Oy'y' - kx'x' --. ky'y" .
With respect, to the corresponding principal system ofaxes OXYZ allinfluence coefficients Oij for which i i= j are zero. As done in the two-dimensional case (section 6), we again replace the remaining influen~ecoefficients aii (i = x,y,Z,f{J,'I/),~) by Ui, the "rigidity coefficients" of the
./
•.(100)

f ,\ ..
I. .HELICA_L SPRINGS, RUBBER RODS AND, VIBRATION·FREE IlIOUNTINGS' , 385
spring' system, with respect to. its principal ' axes ~f elasticit~. In these, coefficients the weight load :::- as we know - plays a part due t~ the, pre-loading of the spring 'system' .which affects the spring rigi<li;ties. Leth .he the height' of the centre of gravity above the centre of elasticity;then with the displacement' x,y,Z,(p,~,{}. the weight yields at the centre'of elasticity, in addition 'to a vertical force mg, extra moments mglup andmgh1p corresponding to the respective extra. horizontal tran~lations lup
- , and h~ of the centre ,of gravity. 'rhus the quantities Px;, Py, P~, Mep, MVJ'Mi} that have to he applied at the centre of elàsticity in order to producethe displacement x,y.,z;rp,1p,{}have the following values [cf. eqs (81)]
Px;=ax;x,Py = (J-yY,
Pz = az z,
. Mep = (aep- m.·gh) rp, lM1jJ= (a1jJ-mgh) 1p,. .Mi} = ai} {},' . Ór e
.\ .
. '(l~l)
whils~_in the special case of symmetry. considered .her<: the .introductionof kx;, ky, kz, kep, k1jJ' k{} (the "damping coefficients" of the system 'withrespect to its coincident principal axes ,-of elasticity and of damping)reduces eqs (99) to
.Pil' t: ...-. y'='''Y Y ,
-p; = kz z,(102) \
;
If also the body itself shows double symmetry with respect to thexz- and yz-planes then two of the principal axes of inertia through thecentre of gravity run parallel to the ;.t- and y-axes, whilst the third coin- .cides with the z-axis, Denoting the moments of inerti~ about the principal .'axes of inertia through the centre of gravity by 11, 12 and 13, the compo-nents P~,Py, P~,M~,M~,M{J.ofthe (sign-inyerted) inertiaforces amountto. '
. p~.= - m(x..:.... hip), M~ ='- (/1 + mh2) ~ - mhY, l'P;' = - m(j + hip) , M~ - - (12 ± tnh2) ip + mhx , (103)
P~= - mz, ' , Mi} = - 13 {}" .
"
, In eqs (103) 11 +mh2, 12 +mh2 and 13 represent the moments of inert~aIep, 11jJand I~ ofthe body about the x-, Y: and z-~xes. Finally, by replacingin eqs (101) Pi by Pi + Pi + Pi (i = ,x,y,z) and M] byMj + MJ + MJ(j= rp, 1p, {}) and using ~qs (102) and (103) we get the following equationsof motion, when written in the form of equations, of equilibrium,
Px;-m(x-hip) = ax;x+kx;x, Mep-Iepip-mhy' (aep-mgh) rp+kepëp'lPy-~.~j+hip) = ayy+ky~, M.1jJ-I1jJ?+mhx , (a1jJ-mgh) 1p+ktp~, (104)·pz -mz = azz +kzz, Mi}-li}{} = ai}{} +ki}{}.,
,
, ,
.. I
~.I .,
.,
I,
, ," , "
" , , ,
J. A. ,HARINGX
, I' , ..
, .Thus ~vith the symmetry referred to' alsó this space problem is reduced f
,to' a system of one- and two-dimension~l, p~oblems .: ~n the pariiicular èasewhere the centre of gravity joins the coincident' centres of elasticity and of.'~amping, h equals ~ero andthus accordingto eqs (104) the space problem, ,resolves even into six separate one-dimensional 'problems.. If the' foundation vibrates we consider its movement likewise ,vith,respect to .the system ofaxes OXYZ and denote its displacement corn-ponents by xo' Yo' zo' CPo' 'lfJo' {Jo' Here the same questions arise as in.the
- two-dimensional case and it can therefore be left to the reader to checkthè accuracy of eqs (lOS) replacing eqs (104)
Px - mg'lfJo -m(x-:-h~} = ax(x-xo} + kX(~7'XO}'Py +- mgcpo -;- m(y + hip} = ay(Y.-Yo} + ky(y - Yo},'\ " . '"
Pz - mz = az (z -:- zo) + kz (z - zo) ,Mrp +mghcpo - Irpip - mhy = (arp - mgh) (cp- CPo)+ krp (<p - <Po),MVJ + mgh'lfJo'- I 'Pip+ mhx , (a'P'- mgh) ('lfJ-'-' 'lfJo)j- k1jJ ("ÏJ - "ÏJo), .. M{} - [,&{}. a{}( {J - {Jo} . .+ kt} (iJ - {jo)·
, ,
(105) "
,
These formulae, which for the sake of simplicity have heen derived forthe case where both ,the body and the attachment of the elastic and damp-ing elements are symmetrical with respectto two mutually perpendicular
I vertical planes and. where, moreover, condition (100) is met, 'naturally, ! apply also for non-symmetrical systems, provided their principal axes
comply. ~th the .recruirements mad~ here. , ', '"].- I \"\
9. Forced vibrations of) the two-dimensional resilient mounting withauxiliary mass'
v
The principle of the resilient mounting with auxiliary mass has alreadybeen explained in' section 3; the construction, indicated in fig. SI, consistsof two masses connected, via. elastic and damping elements, whilst one of,
. them (the main: .mass] is 'attached to the foundatioit by, springs. Here,however; the movements are no longer one-dimensional hut take placein a vertical plane: , ' \' , •
Whereas the "main" spring system affixed to the foundation carries. , . ' . . ., .both the main: mass -and the auxiliary mass, the other "auxiliary" spring,system supports the 'auxili~ry mass only. Both spring, systems have their.own rigidity coefficients ay, az and arp' the value of which should be deter-'mined while the springs are pre-Ioaded due to the weights; ayl' aZI and arplare the rigidity coefficients of the mam: spring system with respect to itsprincipal axes of elasticity under "thè todl weight of main and 'a~liarymasses; ?y2; aZ2 and arp2 are the rigidity coefficients' of-the auxiliary spring,system with respect to the principal axe~of elasticity of this spr~g system. ,
,'.
, ,
, ' \

'1
'. , .• • 1
HELICAL SPRINGS,. RUBBER RODS AND VI~RATION-FREE i\IOUNTINGS , .'" ,,i,
'/ '
-,1/" • V,.
'For the sake of simplicity we, 'shall .confine ()~. considerations to a ,-construction that not only has a vertical axis of symmetry but inwhich ' ,the.centres Cl and C2 'of the two spring systems and that of the damping.system coincide With the centre pf gravity 82 of'the auxiliary mass; the'centre' of gravity 81 .of the main mass, however; may lie a distance' hhigher (see fig. 68). We have chosen this êase because in practièe it is ingeneral fairly easy to comply 'with the requirement concerning the pm"cipal axes, whilst also the centre of gravity of the auxiliary mass __::for, -instance -in 'the shape of a Hat plate .:_ can easily be madè 'to join thecoincident centres of elasticity .and of damping. The centre of gravity ofthe main mass, o~ the other. hand, cannot always be prevented fróm
. , 'being at a higher level; for instance, in the 'case of a block supported by,springs underneath.
"
'\"
'z
y
"
'.,-
387
'''.
\", I \.Fig, 68. A two-dimensional resilient mounting with auxiliary mass; SI and S2 are the .:centres of gravity of the two masses, Cl and C2 the centres of elasticity of the two spring v ,
, systems.
We shall further follow as far as possible the same notations as used insections 6 and 7, but for a prop~r distinctio'u it is necessary to' use thesubscript I for the quantities specially relating to the main mass ánd the. subscript 2 for those relating to the auxiliary mass. Thus the main' and'auxiliary masses are ml and m2 respectively and their moments of inertiawith respect to the origin of the ~ooréJ1nate system Jrp~ and 1(/)2' Furtherthe change in position of the main mass is indicated by the displacement '.components Yl' Zl' CPlof the centre Cl connected with the main mass, and
.' that of the auxiliary mass by the displacement components Y2' Z2" fÎJ2'of the centre C2 connected with the auxiliary mass; whilst Yo, zo' CPodenote
'\ the position of, the foundation. As regards the damping, the notationsky" kz and krp used 'before suffice, since there. is' only, one system ~f ' "damping applied between the two masses. ,. .Applyllig eqs (95) to the auxiliary mass we should bear in mind that
here the main mass acts as the foundati~n. By using the new notationswé arrive at th~ following equations of motion for the auxiliary mass
" '
"
..
. ',
"

,,
388 J. A. HARINGX
". I ,
m,g~, - ~y., ~ Oy,(y,-y,) + /'y{;-, '--y,) 'l- m2z2 = aZ2(Z2 - Zl) + kz (Z2.-:- Zl) ,- Irp2ip2= a~2«({J2- ((Jl)+ krp(fÏJ2- fÏJl)'
(106) .'" ,
\
In ,deriving the equations of equilibrium of the main and auxiliary. '
masses' as ,a whole; we first consider' the case where the foundation' isstationary. We then have' to do with the following forces:
,,(1) the weight mIg acting at the centre of gravity Sl(Yl + hrpl' Zl+ h)'of the main mass and the inertia forces exerted at that point, being-mI (Yl+ hip), -m~zl and -lipl' where I is the moment ofinertia of'the main mass' about SI; ,
(2) the weigh~ m2g acting at the centre of gravity S2 =,C2(Y2' Z2) of theauxiliary mass and the inertia forces exerted at that point, being-mä2' -m2z2 and '- Îrp2ip2;. '
(3) the forces - (mIg + m2g) and -:-ClylYl' -aZizl' -arpl({Jl emanatingfrom the main spring system and acting at Cl(Yl,zl)' '
Writing down the equations of equilibrium about the point 'Cl(Yl' zl) ,, wefind .
- ml(Yl + hipl) - mà2 - aylYl = 0, ' \- mlzl - m2z2 - aZlzl . = 0, . \ (107)
mlghrpl :- mlO\ + hipl)h -:- Iipl + m2g(Y2 - Yl) - --[m~2(z2-Zl) - m2z2(Y2-Yl)] - Irp2ip2- arplrpl= O.
If the foundation vibrates tooz the spring forces occurring in the aboveequations (107) have to be revised in accordance with what has been'noted in respect thereto in section 6; áYlYl has to be replaced by.á:n(Yc:Yo) - (ml+m2) g({Jo' az6 by azf(zl-zo),and arpl({J~by arpl(rpl~({JO)'Considering, further, that I + mlh2 = Irpl and that the terms between.brackets in the third eq. (107) can be ignored as being small of the secondorder, the equations can ultimately be written in the form
'" '
(mI + m2)grpo - ml(Yl + hipl) - m2Y2 = Clyl(Yl - Yo)', l'. ~ '- .. . - mlzl - mè'2 = aZl(zl - Zo) " .' (108)
lntghrpo+m2g(Y2--Yl) - Irpl ipl~mlhYl-Irp2ip2 = (arpî,-;-'fntgh)(rpl-rpO).. .
.'
" ,As was to be expected, here again the one-dimensional problem of the
, .' movement in the direction of the z-axis appears to become detached,for - excepting a small change Î?- the notation - the second eq. (106)and the second eq. (108) agree with eqs (8).' Let. ,, '
(109). . , ~ ,. ' . "
then the results deduced in section 3 in regard to the forced vibrations of

'."
< "HELICAL SPRiNGS, RUBBER RODS AND VIBRATION.FREE MOUNTINGS , 389
, j ~ • '
, ( , , '
: the main mass at sufficiently ¥gh frequencies [eq. (23)1 can be applied 'I
directly to the movement in the direction of the z-axis. From this 'itfollows that' the auxiliary mass plays no part in the forced vibrations and '
, that YaZl/ml must be sufficiently small with respect to the lowest frequency'. ~ .
,w occurring in the interfering vibrations. ' ,We also arrive at this conclusion when assuming that in order of size,
the accelerations at high frequencies will exceed the velocitiee ~nd thedisplacements. Eliminating Z2 from the second eq. (106) and the sec~nd '.'eq. (108), and ignoring the terms with Zl' :il, Z2 and 212 with respect to •those with zl; then - if Zl is already taken small compared to Zo - we- obtain for high frequencies -
.(UO), ,
\ When 'we have to do with the harmonic vibration Zo = ao sin wt then';ID accordance with (UO), we find by approximation forzl the synchronoussolution Zl - -«,'sin cot with the amplitude al equal to
(111)
, . '
If, ,Vith a view to the desired .insensitivity 'of the main: mass to 'vibrations\ of the foundation, it is required that the amplitude-ratio in the directionof the z-axis should have a given small value (al/aO)z, then in connectionwith eq. (UI) and in agreement with what has already been remarked,we must have ' ' I'
I(U2) ," I
Therefore YaZl/~l' Le., the natural frequency of the system in th~ absenceof the auxiliary mass, must he much smaller than co.. Proceeding in a similar manner, with regard to the other movementsof-the main mass, we find that eqs (106) and (108) for sufficiently high:frequencies lead to the following r~lations
, ma~.+ ml~~~ R; CIyl!O + (mI + u{2)gepO'( (U3)mlhYl + Irplepl R; arplepO' )
, ", The cases epo = 0 and Yo = 0 will be considered separately. In both casesthe forced vibration of the main mass' can be regarded as' a rotation ofthis mass about ~ point which is situated at a distance lrp ahov_ethe coin-cident centres of elasticity and of damping. This' distance is determined, by the condition that invari~ble Yl + lrpepl = 0, so that also
(U4)

r,
, I,:,' Just as !!q. (1l0) led to condition (1l2), it follo~v_sfrom eqs (1l6) and '(1l7) ",that a,ny insensitivity of the system to vibrations of the foundation asdetermined hy the ratios (al/aO)y, (al/aO)z and (a~/a(Î)cp is assured only ifinaddition to (1l2) also the following conditions are satisfied' ' -,:
. "~ ... '
. "
I
~'. , ...... ,I
r "
- ,
" ,
, '
, ,./
- ," )\ - I
...:, , . ,J, A. HARINGX'. '. ,,,
Introducing the radius of gyration ÀCPl,and F~tting
i Icpl/ml as ulrit of length
. , (1l5),.then according to eqs (1l3) and (1l4) weobtain'(1) in the case where the foundation translates (q>o- 0)
, \
\
(1l6)
(2) in the: case where the foundation rotates 'ahout the coincident' centresof ela~ticity and of damping (yo = 0)'
(1-scp2) I'Pl~l Rj ~arpl-èp(ml + m;)gÀcpl~ q>~; !' I s~acpl- (ml + m2)gÀcpl 1
cpRj ACPl'acpl - scp(ml+:m2)gÀcpl
(1l7)
, :: = (1-~ Scp2)~2 (:t, . ' !",
Iacpl -'Scp (ml +m~) gÀ~ll= (1- Srp2)W2 (al) " '. ,~ , ~cp
Apparently' the auxiliary mass (m2) exercises some influencè, hut thiseffect disappears in the special case where the centre, of gravity of the 0
, main mass - as well as that of th.e auxiliary mass - joins the coincident, ,centres o~ elast~city and of damping. Here h = 0 and thus Ècp = 0, so
",: t,hat eqs (llB) are reduced to' , ' \ "
(llB)
(1l9)
'éö~sequently the na~ural frequencies,1ayl/ml and'1arpl/lrpl ofthis systemin the absence of the auxiliary mass must he ,much smaller than w.
o With a certain design ml' m2, I~l' Àrpland Scpas ,veil as wand the, ratios(al/ao)i for i 'y, z, q> may he regarded more or less as given. Eqs (1l2)and (llB)" or (1l9) then enable us to determine the rigidity coefficients'ayl' azl, acpl of the main spring system required in view: of the forced. vibrations at high frequencies. 1 •
,.
I .
• Ia,,'
','
!' :.
/'- ;., "
~ c. '/ ': . ~..1 I
HELICAL SPRI,NGS. RUBBER R(;lD!) ANI;' VIBRATION-fREE MOUNTINGS ' 391~~----------~~----~--~------~--~--~----------, \ " '10. Free vibrations of the two-dimensional 'resilient mounting 'with
auxiliary mass
, \,
, ,
Not only the vibrations at high frequenciee, but also the decay 'of the free I
vihrations of the main mass after àn impulse or an initial displacernerrt is, of great importance. Further at the same time 0I!e has to see that the
," 'rèsilient support is nót -too "weak". In this connection we have .to putthe question what positions Y!' z!' CP1and Y2~ Z2' CP2the two masses' will /assume when with à' stationary foundation the main mass is subjected tothe external load Py, r; Mp. The answeris givel?-by èqs (106) and (108)' if(1) Yo, zo' (/Jo and the derivatives 'of all other coordinates are taken as zero,(2) , the terms Py, Pz, Mp are added to the l~ft-hand members of eqs (108).We then find ," - , '
, "
'-11
~" ',
and
Eliminating Y2 - Y1 from these equations we obtain I.' ' f
, ( m git' m2 g2 ) -, . 1 ' 2 .. , 'Mp = ap! 1--- - -- CP1= ap!(/J!', ap! ap! Cly2 . " '
"
(122) , '
, '
The change of position of the main mass due to a (static) externalload is,'\ ,according to (121) and (122), determinëd.by Cly1' aZ1 and a~l' Apparentlr.,
therefore, .these quantities decide whether or not the spring support istoo "weak"; From eqs (122), it further follows that in order to avoid-instability it is anyhow necessary to ensurertha't
"
, I
" \
I 2 2 \mlgL + m2g < i.arp! ap1 Cly2 ,
In most cases occurring in practice -- as we shall presently demonstrate ___:both terms of the left-hand member of the relation (123) are small against,unity. This means that' compared to the spring' reactions the weighteomponents to be' concidered .here mostly play a minor pert-. This is ofgreat importance because in the differential equations (106) and (108)it is just the occurrence of terms related to grávity which makes a. generalsolution, of' the problem s~ diffic~t. Therefore we igp.ore these. :terJl1.sascompared to the others and moreover put Yo, Zo and, (/Jo'equal to zero.Again the one-dimensional problem of the -movement in the direction .
'of the s-axis is detached; so ~hat the results arrived at insection 4 in regardto the, free vibrations are equally applicable here.' When written in the new
(123)
'I' '." .
392 J. A. HARINGX"
notations introduced in section 9 ,the optimum values for the ratio of therigidity coefficients and for the coefficient.of damping; given in eqs (50),,bécome' ,
aZ2 mI m2-= ,aZl (mI + m2)2
, ,
Further, the :ideallogarithmic decrement-D defined in section 5 [eq. (73)].giving an overall impression of the decay of the free vibrations is to afirst approximation given by eq. (75). T~e subscript z being added, it is
,(125)
However, as w~have seen,this approximation is very rough and generallygives too -high a value for Dz (with mI -"m2, for instance, D = 2'46instead of 3'62; see fig. 63 for al/aO = 0'01).As regards the other movements we have to do with the follq,villg
equations, obtained by omitting from (106) and (108) the terms with gand taking Yo' Zo' epo as zero,
I
- md2 ~ ay2(Y2 - Yl) + ky(Y2 - Yl)' -~. - Irp;.~2= arp~~ep2-°:'1) + kCP(fÏJ2,- CPl)'--:m2Y2-ml(Yl + hepl) = aylYl'- Irp2ifJ2- IrplifJl - mlhYl i'l:j acp!epl'
If the centre of gravity of the main'mass joins the coincident centres ofelasticity and of damping and thus It = 0, the (fictitious) problem in_question resolves itself according to eqs (126) into two one-dimensionalproblems. Then, in analogywith (124), the conditions of the most favour-able decay of the free ~rations are
(126)
ay2 mlm2-= ,ayl I (~! + ~2)2~aq;2 I rp!I q;2 '-= ,arp! '(Irp! + Irp2)2
(127)
whilst in analogy with (125)we find for the ideal logarithmic decre::nent'~
I·
If on the other hand It is not equal to zero we .start from the completeeqs (126) and, as in the' one-dimensional case, again introduce a new(dimensionless) time t, takin&
I'

, "
, 4 • •~ELICAL SPRINGS, RUBBER. RODS AND V:IBRATI~N.FR~E l\IOUN~INGS
(129)
Wé further put'- I
{32= aepl mI + ,m2 ,
.ayl lIJn + 1'{i2
•• 7
, and also_ YI
rh=-,'!.epl
. / (131), .
\
Elimination of Y2 and CfJ2 from eqs (126) then leads to. the following differ-ential equations in ih and epI
lifii + qy"ih + (1+Py)1h + qy1]l+ Py1h. + 11,e~P.(q;;+qy.p,-r: pyp,). 0, lyp,95i + q~{J(ÎJ1 + (1 :+- Pep) (J2cA + qep{)3cjJI+prp{J4f{J1+ . (132)
. . '" ~ + yp,sep('fJï + qep{J"ih+ prp{J.2jh) = 0,
where the dots indicate differentiations with respect to 'i.
On putting ïh: ::....C epi and f{J1 = D epi we obtain fr~m (132)
C. ~p,p4+qYP3+(I+PY)P2+qyp+pyt+P,SepD(P4+qy'.p3+pyp2)=0;'l "D~Yfp4 + qep{Jp3 +(1 + Pep) {J2p2 + qep{J3p + prp{J4t +. (133). . . .' + yp,sepC (p4 + qrp{Jp3+ pep{J2p2) = O.
A solution differing. from zero is thus found only if the determinant ofthis system equals zero. This leads to an eighth-degree equation in the(complex) quantity p, the discussion of which ~s considerably simplifiedif we confine ourselves to the case .
{J,= y = 1', Ps = I!ep., (134)The first member of the equation can then be split up into tw<?fourth- ,degree factors, so that we obtain two fourth-degree equations instead, viz.;
, .. . ." .~p,p4 + qyp3 + (1+py)p2 + qyP +pyt ± /-tsep(p4'1- qyp3 + pyp2) = O. \ (135)
If the data of the problem are such that we h~ve to do with dampedvibrations only, then two by two the eight roots will be conjugate complex.For the first ,eq. (135) with' the plus sign they can be -represented by- !n±iWI a~d - 122±iw2 and for the second eq,: (135) with the minus
.. ',
393
\
.....
\ "
394 J. A. HARINGX' i
" " sign, liy - 123±i~3 and - 124±ico4.' Here again the quantItIes 12 are a" measure for the rate at which the amplitudes of the {reevibrations dieout.
It will be obviousto keepon our point ofview taken in section4 that generally .the damping is most favourable if the smallest 12 has the largest possible
'I " ,_• I value. Consequentlywe put the question h0'Y large py . ,Pep and qy - qepv.: \, have to be chosen ill order that 121 (121< 122) shall be as large as possible.
. :Whether or not our tacit assumption that 123 and 124 like 122 are greater thanI 121 is justified, can only be determined afterwards. .
Eq: (135)with the plus sign, ~hen written in the form'I
r '
\ ,u(1 +eep)p4+ (1+ ,ue,p) qyp3 + ~1+ (1+ ~eep)p~~p2 +qyp + py= 0, ,(136) .
\ . sho;wsgreat similarity with eq. (32). Just ~s eq. (32)"leads to eqs (35)", . here it can similarly be shown that the real parts of the roots - 121±icol
and -;- t?2±ico2 of eq. (136) must satisfy the four relations ', -
If we eliminate col and CO2 from. these equations and' for tbe sake of-brevity put
1 1 . 1 1 + peepU = '# 1+ eep+ ,#py 1+ e<p
2(138)
\ .
then 121and 122 are found to satisfy no~only the fust eet. (137) but alsothe ..:-,. equation ,
" '~.1 1 1 1~',.:",'/ I2lI22.u2_(122'~l2l)2 1+ . P+(I+ y--PY-l+ . =0. (1,39), _. ,ueep, peep, ,u eep
," /', Here again, asIn section 4, wè can plot 121 and 122 in a graph. The inter-related values of 121 and (12 are then-found as points of intersection of the·
. curve represented by eq. (139) and the straight line represented by thefirst eq, (137). If the rigidity parameter Pv = Pep is 'equal to '
1+ 'eep
..
J'-. \
/ . '. py = Pep= ,u (1 + p.eep)2'. . "
then eq. (139)breaks up into two parts, namely
U = ei - and (1+ peep) I2l122U = (122 -121)2.
(140) , ,
(141)"
\ :" ' ,./,
/'

J " ::,,\::'.- . ,., " , " ,
, 't.
I!ELICAL. SPRINGS, RUBB!"R RODS AND VIBRATION-FREE ~IOUNTINGS, .395
.,' . ,~.
Apparently conditions are' then similar to those the middle diagram offig. 58 refers to. The point where the two curves touch (point A in fig.,59)will now again oorreepond to' the most favourable damping. The values ,'.of l?l and e2 then appear to be equal and amount, in ·accordancewith: cO
(138), (140),an~ (141),to' "
, el = e2 = t -VI fl' '1 ' (142)" ,fl ' -v (1+ erp) (1+ !'elp,)
Further, owing to the first eq.· (137) the damping parameter qy == q~ isequal to', .
J. I V~y=qrp=-V4fl(L--.u)· l+el]1, (143). " (1+ flel]1)S. ~
," .
\;
\'
, ..For es and 24 belongingto' the roots of eq. (135)with the minus sign the, relations' are of course similar to' those given in the first"eq. (137), (138)and (139), th~ only difference being that - ep tak~s the plaèe of + elpand el and e2 have to be replaced byes and e4' Substituting in thesemodified equations the chosen yalues for py and qy' given in (140) and-(143), we can graphically determine es and e4' .. For the special case of two equal masses (fl = 0'5) we have calcul~ted,
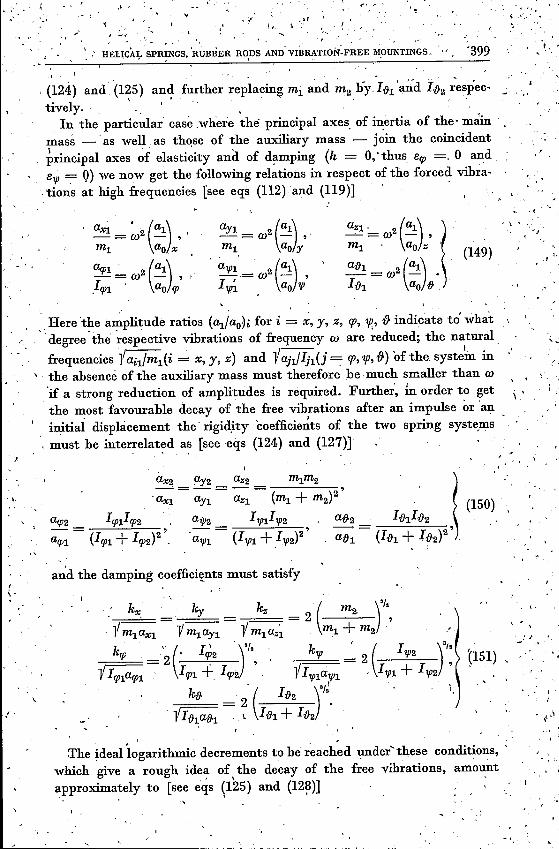
. for different (positive) values of elp, the quantities el 'I e2' es and e4' andplotted these as functions of + elp in the ~ight-hand half of fig. 69. Since, the radius of gyration Alpl ca_nnever be smaller than the distance h, thecurves have to be broken off at elp = 1.We now seethat es is practicallyalways slightly less than el = e2' Thus es becomes a measure instead ..:'of el' Probably; therefore, it would h~ve been bet~èr to take es(es< (4)
",
'. ', I
.',
(J'"
• L ,
.\ 1.5 /\ /,
1.0 /, '''\ V,04
<, /Vol; ~ J1=1'2
r=- '1'3
êcp
-
,. '
I,
,"
"1., '
-1.0 0.5 0 0.5 1.0. 5'8930, ", '
, Fig. 69. The damping quantities é,(i = 1, 2, 3, 4) as functions of Etp, being the height ofI the centre of gravity of themain mass above the, coincident centres of elasticity and of,damping .in relation to the radius of gyration of the main mass, for optimumvalues of therigidity and damping parameters; p, = 0'5 (ml';' m2)·
, ;
396 J. A., HARINGX
..
, " . ..... . . I, j
and el (el < e2) as equal, but then this would have led to relations thatcan~ot very well be worked out analytically. Moreover, the improvement-to' he expected is so small that we can just as well keep to "the solutionfound here. ' ', The graph has been completed for the region of negative values of erp'
that is to say, for a construction where the centre of gravity of the main -mass lies below the coincident centres of elasticity and of damping. Sincethe terms in eqs (106) a~d (108) related to gravity haye been neglected,it should make no difference whether this centre of gravity lies at the samedistance h above or below the said common centre, and this is indeedproved by the fact that the transition from + erp to'_ erp involves only.an interchange of the significance of el and ea as well as of e2' and e4'Instead of el (el < e2) having to be as large as possible we now put thatea (ea <: e4) has to he as large as possible, an.:dthis explains why the c_urves
; " drawn in fig, 69 are symmetrical about the vertical coordinate axis. Therelations derived for Pr = Prp and qy = qrp [eqs (140) and (143)] mus,t_therefore read such ,that elp represents the absolute value of the ratiohJArpl' and thus
1+Ierplpy = Pr: , p, (1+ p,lerp!)2'
II
Further, the assumption f3 = y =.1 (eq. (I3~)] leads, in connectionwith eqs (130), to the conditions .
: ,,'t,
mI" Irpl-=-,m2 Irp2
,(145)
, .
For the case where el = e2 R::! ea.the ideal logarithmic decrement D to be" vreached with .this construction amounts approximately to 2neldl _ ei
'[eq. (74)], sothat from eq. (142) we get '
" 11 'I-p". '. Dy = Drp ~.n p,( 1+ lerp!) (1 + ,uIsrpI) - :1(1- p,)
I~ fig. 69 we s~e_that el = ~2 R::! ea and thus Dy = Dep decreases only little"in value when srp differs from zero., I '
For the sake of completeness it has to be determined ill.what cases it isallowed to ignore gràvity. We have seen that the two terms in the left-
, hand memher of the relation (123) must be small compared to unity.From the first eq. (1l8) and eqs (130), (131), (144) and .(145) it can be I
deduced that this condition is satisfied if
(146)
, '
'.
, , ,
HELICAL SPRINGS, RUBBER RODS AND VIBRATION-FREE MOUNTINGS , -397
, '
- , ~gh erp, s (ào)' '. \_= -- - ~1, ' alpl 1- e(l w2 Àlpl al Y '. .(147)
m~g~. 1- p, , (1+ p,lelpl)2 ~_g_' (ao)(2~ 1.' .alplaY2 p,3 (1+ lelp!) (1- Slp2)2 (W2Àlpl al y)
.If, for, example, we have to do with a mounting (p, = 0'5, slp = 0'5,ÀqJl= 10.cm) where the vibrations with the frequency 'V =wJ2n= 15 cJsec ,have to be reduced in the ratio of 1 to 15, then according to eqs (147) -
. '
"
(148)
,These values are rather large and do not entirely justify the ignoration of I
-gravity. Smaller values are found when p, and Àrpl are larger and 'slp is smaller,so that [a smaller mass ratio m2Jml' larger dimensions and a centre of-gravityof the main mass lying closer to the coincident centres of elasticity and of .damping help to meet the requirements (147). It must not be forgotten,however, that all we are trying to do here is to give the mounting the mostfavourable damping 'properties. And even if the most favourable solutionis not obtained when ignoring gravity the result will in any case lead to areasonably good damping. The fact is that, as we have seen in the one-dimensional case, the behaviour of the mounting in ,regard to the decay'of the. frée vibrations is not very m~ch affected when the rigidity and'damping parameters differ somewhat from their optimum values. With a 'view to the stability of the construction, however, condition (123) mustinevitably be satisfied. Therefore, in those cases where gravity plays animportant part it will he preferable in regard to thè stability to adapt,
r- the (fictitious}' problem as far as 'possible to actual conditions. This canhe done by replacing acpl in eqs (126), (127), (130) and (145) by a~l' themeaning of which is given .hy eq. (122). /
Otherwise, it is to be emphasized here that the insensitivity" ofthe mount-ing to forced vibrations is not affected by this ignoration of gravity. It is
. assured by eqs (112) and (118), deduced in full agreement with the actualrties.Owing to the restrietion placed upon us [see,eqs (~34)], also for the ~ase ..
,that the centre of gravity of the main mass joins the coincident centres or'elasticity and of damping (slp = 0) our results still relate to a construction :where fJ and y equal unity and where as à consequence conditions (145) ,áre' met. Yet in this case it is not es~ential.to adhere to these conditions,for in the deduction of eqs (127) it appeared that the (fictitious] two- ._dimensional problem then breaks up into two independent one-dimensionalproblems. Thus it is not at all essential that there should he a certainmutual relation between the various quantities as .indicated in eqs (145).
" '
"
,

J'
'., ,."
, \
I" t'
, ,
" " . ,
398 J. A. HARINGX
-", Only if it is desired to give this construction the same properties in respectof the horizontal translations as in respect of the rota!~ons [(~/ao)y "'(u1/aó)rp an,d Dy = Drp] it is in connection with (119) and (128) necessaryto comply with conditions (145).' .
In many cases one will be obliged to construct the mounting in a"different way from that dealt with here. Since the forced vibrations of the
I mounting at high frequencies are practically only dependent upon the, resiliency in the spring support of the main mass, the insensitivity ofthe mounting to vibrations of the, foundation can always be controlled
, .[eqs (112) and (118) or (119)]. The free' vibrations, on the other hand,are governed also by the spring support of the auxiliary mass and bythe manner of damping. Here one has the choice of two possibilitiés. If the-cerrtres of gravity of the main and auxiliary .masses and thê centres ofelasticity and of damping' do not lie too far apart then the problem canhest be approached by assuming that the~e centres do coincide [eqs (112),,(119), (124), (127)]. If, on the other hand, the centre of gravity of themain mass unavoidably lies higher, the construction should be designed .. on the basis of the results reached here, relating to the case where {3= y :...._i .[eqs (112),.(118), (124), (130) (131), (144) and (145)]. If necessary, arpl'in eqs (127) or (130) and (145) can be replaced by a~l given in eq. (122).
, , \
, 11.' The three-dimensional resilient mounting with auxiliary m~ss
In section 8 we have seen that under certain conditions the movementin space of a resiliently supported body splits uJ>into two two-dimensionalmovements, taking place, in two mutually perpendicular vertical planes,.and the one-dimensional movement about their verticalline of intersection.Also if an auxiliary mass i~ present we aim at such a splitting, up of themovement. We therefore confine ourselves' to a construction that i~ not. only symmetrical with respect to two mutually perpendicular verticalplanes but which, moreover, has the centres 'of the two spring systemsand that of the damping system coinciding 'with the centre of gravityof the, auxiliary mass. The centre of gravity of the main mass is at a
....height .h above it ..The two-dimensional movem~nts then taking place in t~e two planes'
of symmetry (xz- and yz-planes) have been studied in sections 9 and 10.However, when dealing with the movement in the xz-plane we shall have
. ' to replace ,y and cp occurring in the results for the movement in the yz-,plane by x and -1fJ respectively. Further, the remaining one-dimensional 'movement about the vertical line of intersectien of the planes of sYmmetry', (z-axis) is entirely analogous to the movement along the direction of thez-axis, which i~ detached 'in each of the two two-dimensional problems,~t is described by equations obtained by substituting {}for z in eqs (112);
" ,I', , "'. '.-. '
"Here 't~e amplitude ratios (a1iao)i for i = ~,y, z, tp, 1fJ.' 1J indicate to' what \/ degree the respective vibrations of frequency co are reduced; the natural
frequencies Yai1/m1(i = x, y, z) and Yaj1/Ij1(j , cp, 'Ijl, 1J) of.the syste'k in' "\ the absence ofthe auxiliary mass must therefore ;be.much smaller than co ~', ''if a strong reduction of amplitudes is required. Further, in order to get "the most favourable decay of the free vibrations after an impulse or 'an
-, l . '
initial displacement the' rigid.ity coefficients of the two spring systems" must be interrelat~d as [see eqs (124) and (127)]
,,{ ,>.'.,
"," !
I .....• Ór
, " ., .' HELlcÀL SPRINGS, 'RunBER RODS AND' VIiIRATION~FREE MOUNTINGS .• '.,. . "'. ~ .. \. . " . _ .. '399 I',
, "
, (124) and '(125) an4 further replacing mi and ~2 by '1.&1'aIid t.&2 reapee-tively. . . ' '. ' ' ,. . ". In the particular case .where the principal axes. of inertia of the- main .
flass - as well ,as those of ~he auxiliary mass - join the coincidentprincipal axes of elasticity and of damping (h = O;thus, srp =. 0 ands1jJ . Q) we now get the following relations in respect of the forced vibra-tions at high frequencies [see eqs (112) and (119)] ,
\ ~ of. "
axi. _' 2(a1) , ay1 2 (al)~c_ ,( .. ) ~
. \ . ",
--co - ,. ml = co ao y"--w - , "
m1 ao x m1· aoz' (149)- arp1 ., 2 (al) . à1jJ1' , 2 (al) aD1 2 (al)--co - , I I1jJ~= ,w ao 1jJ' ID1 =w ao #. ._lIP1' ao rp
and the damping coefficients must satisfyI,.
\ . ,.' ,
~151)
. '
\, I'.' t
. '
~he îdeal logarrthmic decrements to be reached under....these conditions, 'which give a rough idea of the decay of the free vibrations, amount
.' \approximately to [see eqs (125) and (128)] . I
, '

....
.... .
. J. A. HARINGX
/
It has already been pointed out that this approximation is only veryrough and generally gives too high a value for the ideallogarithmic decre-ment (with ml = m2, for' instance, D = 2'46 instead of 3'62; see fig. 63fo.r ~/ao , 0'01).
With a view to the stability of the spring support it is moreover alwaysnecessary to satisfy the conditions [see eq. (123)' with h = 0]
resp.
,The smaller. the expression in the left-hand members of these relationscompared to unity [see eqs (147) with 8rp'= 0] the less is thedisturbing.effect of gravity and the morereliable are the formulae given in (150) and(iSl) that relate to the quantities of subscripts 'x,y, cp and ?p.
For the sake of completeness we here repeat the remark made at the:end of section .8, that the symmetry considered is not strictly essential
. 'for the validity of the formulae derived. All that is required is a similarsystem of principal, axes. .
.(To be continued)Eindhoven, Jqly 1949
, / .
, i
I' •
' ...~



![Ondulé: Designing and Controlling 3D Printable Springs · HELICAL SPRING THEORY Our approach is based on helical springs [22], which have three basic configurations—compression,](https://img.dokumen.tips/doc/110x75/5e97e6d886fa3e4f6f1a5e42/ondul-designing-and-controlling-3d-printable-helical-spring-theory-our-approach.jpg)

























