Embed Size (px)
Citation preview

On Matrix Momentum Stochastic Approximationand Applications to Q-learning
Adithya M. Devraj1, Ana Busic2, and Sean Meyn1
Abstract— Stochastic approximation (SA) algorithmsare recursive techniques used to obtain the roots offunctions that can be expressed as expectations of a noisyparameterized family of functions. In this paper two newSA algorithms are introduced: 1) PolSA, an extension ofPolyak’s momentum technique with a specially designedmatrix momentum, and 2) NeSA, which can either beregarded as a variant of Nesterov’s acceleration method, ora simplification of PolSA. The rates of convergence of SAalgorithms is well understood. Under special conditions, themean square error of the parameter estimates is boundedby σ2/n+o(1/n), where σ2 ≥ 0 is an identifiable constant.If these conditions fail, the rate is typically sub-linear.There are two well known SA algorithms that ensurea linear rate, with minimal value of variance, σ2: theRuppert-Polyak averaging technique, and the stochasticNewton-Raphson (SNR) algorithm. It is demonstratedhere that under mild technical assumptions, the PolSAalgorithm also achieves this optimality criteria. This resultis established via novel coupling arguments: It is shownthat the parameter estimates obtained from the PolSAalgorithm couple with those of the optimal variance (butcomputationally more expensive) SNR algorithm, at a rateO(1/n2). The newly proposed algorithms are extended toa reinforcement learning setting to obtain new Q-learningalgorithms, and numerical results confirm the coupling ofPolSA and SNR.
I. INTRODUCTION
The general goal of stochastic approximation (SA)is the efficient computation of the root of a vectorvalued function: obtain the solution θ∗ ∈ Rd to the d-dimensional equation:
f(θ∗) = 0, (1)
where the function f : Rd → Rd is an expectation:f(θ) = E[f(θ,X )], f : Rd × Rm → Rd, and Xis an Rm-valued random variable. The function f isnot necessarily equal to a gradient, so the settingof this paper goes beyond optimization. Specifically,the algorithms and analysis contained in this workadmit application to both stochastic optimization andreinforcement learning (RL), among other areas of
Funding from ARO grant W911NF1810334, National ScienceFoundation award EPCN 1609131, and French National ResearchAgency grant ANR-16-CE05-0008 is gratefully acknowledged.1Department of Electrical and Computer Engineering, University ofFlorida, Gainesville, FL 326112Inria and the Computer Science Department of Ecole NormaleSuperieure, 75005 Paris, France
machine learning. As in much of the related literature,it is assumed in this paper that there is a sequence ofrandom functions {fn}, fn : Rd → Rd, satisfying foreach θ ∈ Rd,
f(θ) = limn→∞
1
n
n∑k=1
fk(θ) (2)
where the limit is in the a.s. sense.The SA literature contains a large collection of tools
to construct algorithms that solve (1), and obtain boundson their convergence rate. In this paper we show hownew algorithms with optimal rate of convergence canbe constructed based on a synthesis of techniquesfrom classical SA theory combined with variants ofmomentum algorithms pioneered by Polyak [27], [28].
Three general classes of algorithms are investigatedin this work. Each is defined with respect to a non-negative scalar gain sequence {αn}, and two included × d matrix gain sequences {Gn}, {Mn}. For eachalgorithm, with initialization θ0 = θ−1, the differencesequence is denoted: ∆θn := θn − θn−1 , n ≥ 0.I. Matrix gain stochastic approximation:
∆θn+1 = αn+1Gn+1fn+1(θn) (3)
II. Matrix momentum stochastic approximation:
∆θn+1 = Mn+1∆θn + αn+1Gn+1fn+1(θn) (4)
III. Nesterov stochastic approximation (NeSA): For afixed scalar ζ > 0,
∆θn+1 = ∆θn + ζ[fn+1(θn)− fn+1(θn−1)]
+ ζαn+1fn+1(θn)(5)
A common assumption on the step-size sequence {αn}is: ∑∞
n=1 αn =∞ ,∑∞n=1 α
2n <∞ (6)
We take αn ≡ 1/n throughout.If Gn ≡ I , then (3) is the classical algorithm of
Robbins and Monro [31]. In Stochastic Newton Raphson(SNR) and the more recent Zap-SNR algorithm [12], [13](also see [32]), the matrix sequence {Gn} is chosen to bean approximation of the Jacobian: Gn ≈ −[∂f(θn)]−1.Stability of the algorithm has been demonstrated inapplication to Q-learning [12], [13], but general theoryfor such an algorithm is still open.
2019 57th Annual Allerton Conference on Communication, Control, and Computing(Allerton)Allerton Park and Retreat CenterMonticello, IL, USA, September 24-27, 2019
978-1-7281-3151-1/19/$31.00 ©2019 IEEE 749

The matrix momentum algorithm (4) coincides withthe heavy-ball method of Polyak when {Mn} is asequence of scalars and Gn ≡ I [27], [28], [21].Justification for the special form (5) in NeSA is providedin the following section.
Problem Setting: As in many previous works in thecontext of high-dimensional optimization [21] and SA[19], [20], [9], parameter error analysis in this paper isrestricted to a linear setting:
fn+1(θn) = An+1θn − bn+1= A(θn) + ∆n+1 (7)
in which {An} is a d × d matrix valued stochasticprocess, {bn} is d-dimensional vector valued stochasticprocesses, with respective means A :=E[An], b :=E[bn],and for n ≥ 1,
∆n+1 := An+1θn + ∆∗n+1 (8)
where,
∆∗n+1 := fn+1(θ∗) = An+1θ∗ − bn+1
and the tilde always denotes deviation: θn := θn − θ∗,An+1 :=An+1 −A.
Rates of Convergence: The main contribution of thepaper is convergence analysis of the matrix momentumstochastic approximation algorithm (4), and the NeSAalgorithm (5).
Rates of convergence are well understood for the SArecursion (3). It is known that the Central Limit Theorem(CLT) and Law of the Iterated Logarithm (LIL) holdunder general conditions, and the asymptotic covarianceappearing in these results can be expressed as the limit[5], [20], [9]:
Σθ = limn→∞
Σθn := limn→∞
nE[θnθTn] . (9)
The CLT implies:√nθn
dist.−−→ N (0,Σθ).
A necessary condition for quick convergence is thatthe CLT or LIL hold with small asymptotic covariance(9). Again, for the SA recursion (3), optimization ofthis quantity is well-understood [5], [20], [9]; Denoteby ΣG the asymptotic covariance for (3) with a fixedmatrix gain Gn ≡ G. When ΣG is finite, it is givenby the solution to the following Lyapunov equation [5],[20], [9]:(
12I +GA
)ΣG + ΣG
(12I +GA
)T
+ Σ∆ = 0 (10)
where Σ∆ is the asymptotic covariance of the noisesequence {∆∗n}:
Σ∆ = limn→∞
1
nE[ ( n∑
k=1
∆∗k
)( n∑k=1
∆∗k
)T ](11)
The choice G = G∗ := −A−1 results in the SNRalgorithm, for which asymptotic covariance admits anexplicit form:
Σ∗ :=A−1Σ∆(A−1)T (12)
This is optimal: the difference ΣG−Σ∗ is positive semi-definite for any G [5], [20], [9].
However, in general, the asymptotic covariance of arecursion of the form (3) need not be finite. A sufficientcondition for finite asymptotic variance is that the realparts of all the eigenvalues of the matrix GA arestrictly smaller than − 1
2 ; The condition is necessary andsufficient if Σ∆ is positive definite [13, Proposition A.1].
Infinite asymptotic variance implies a rate ofconvergence that is slower than O(1/
√n).
What about computational complexity? In realisticapplications of SNR, the matrix gain sequence appearingin (3) will be of the form Gn = −A−1
n , where {An}are Monte-Carlo estimates of the mean A. The resultingcomputational complexity of inverting such a matrix ateach iteration (which could be as bad as O(d3)) is abarrier to application in higher dimension. Steps towardsresolving this obstacle are presented in this paper:
(i) The hyper-parameters appearing in the matrixmomentum SA algorithm (4) can be designed so thatthe error sequence enjoys all the attractive propertiesof SNR, but without the need for matrix inversion;Since the recursion in (4) only involves matrix-vectorproducts, this would result in an overall per iterationcomplexity of O(d2).
(ii) NeSA defined in (5) is often simpler than thematrix momentum method in applications to RL. Aformula for the asymptotic covariance of a variant ofNeSA is obtained in this paper; While not equal toΣ∗, the reduced O(d) complexity makes it a valuableoption.
These conclusions are established inPropositions 3.2, 4.1, and 4.2 for a linear settingof the form (7), and illustrated in numerical examplesfor new Q-learning algorithms that are discussed inSection V. The assumptions of the main results areviolated in application to Q-learning since the particularroot finding problem is non-linear. Nevertheless,coupling is seen between PolSA and Zap SNR versionsof Q-learning in all of the numerical experimentsconducted.
Unifying algorithms: An additional contribution ofthe paper is establishing strong theoretical connectionsbetween existing popular algorithms. Nesterov’sacceleration and the heavy-ball method both are knownto have second order dynamics, but their relationshiphas not been very clear. In this paper we propose a newunderstanding of the relationship, which is only possiblethrough introducing the concept of matrix momentum.
750

We show that the matrix momentum algorithm PolSAcan be interpreted as a linearization of a particularformulation of Nesterov’s method. We further show thatPolSA approximates (stochastic) Newton Raphson, thusestablishing connections between the three algorithms:Nesterov’s accleration, PolSA, and SNR. This notonly helps in explaining the success of Nesterov’sacceleration, but may also lead to new algorithms inother application domains.
Literature survey: The present paper is built ona vast literature on optimization [25], [27], [28], [26]and stochastic approximation [19], [20], [9], [32], [29],[30]. The work of Polyak is central to both thrusts: theintroduction of momentum, and techniques to minimizevariance in SA algorithms. The reader is referred to [13]for a survey on SNR and the more recent Zap SNRalgorithms, which are also designed to achieve minimumasymptotic variance.
In the stochastic optimization literature, the goal isto minimize an expectation of a function. In connectionto (2), each fn can be viewed as an unbiased estimatorof the gradient of the objective. The works [24], [15],[17] obtain conditions for optimal convergence rate ofO(1/
√n) for various algorithms.
In ERM literature, the sample path limit in (2) isreplaced by a finite average [2], [11], [17]: fn(θ) =n−1
∑nk=1 fk(θ). Denoting θ∗n = arg minθ fn(θ), under
general conditions it can be shown that the sequenceof ERM optimizers {θ∗n} is convergent to θ∗, and hasoptimal asymptotic covariance (a survey and furtherdiscussion is presented in [17]).
The recent paper [17] is most closely related to thepresent work, considering the shared goal of optimizingthe asymptotic covariance, along with rapidly vanishingtransients through algorithm design. The paper restrictsto “least squares regression” rather than the generalroot finding problems considered here, thus ruling outapplication to many RL algorithms such as TD- and Q-learning [36], [37], [19].
The algorithms presented in this work achieve theoptimal asymptotic covariance, are not restricted tooptimization, and we believe that in many applicationsthey will be simpler to implement.
II. MOTIVATION & INSIGHTS
Consider first the deterministic root-finding problem.The notation f : Rd → Rd is used in place of f in thisdeterministic setting, and the goal remains the same: findthe vector θ∗ ∈ Rd such that f(θ∗) = 0. The objectivein this section is to bring insight into the relationshipbetween the three algorithms (3–5) discussed in theintroduction.
Deterministic variants of (3–5) commonly consideredin the literature are, respectively,
Successive approximation:∆θn+1 = αf(θn) (13)Polyak’s heavy ball:∆θn+1 = µ∆θn + αf(θn) (14)Nesterov’s acceleration:∆θn+1 = µ∆θn + ζ[f(θn)− f(θn−1)] + αf(θn) (15)
where α, µ, ζ are positive scalars. Nesterov’s algorithmwas designed for extremal seeking, which is the specialcase f = −∇J for a real-valued function J : Rd → R.The recursion (15) is the natural extension to the root-finding problem considered here.
The questions asked in this paper are posed in astochastic setting, but analogous questions are:(a) Why restrict to a scalar momentum term µ, rather
than a matrix M?(b) Can online algorithms be designed to approximate
the optimal matrix momentum? If so, we requiretools to investigate the performance of a givenmatrix sequence {Mn}:
∆θn+1 = Mn+1∆θn + αf(θn) (16)
Potential answers are obtained by establishingrelationships between (13–15). The heuristicrelationships presented here are justified for thestochastic models considered later in the paper.
Consider the successive approximation algorithm (13)under the assumption of global convergence: θn → θ∗ asn → ∞. Assume moreover that f ∈ C1 and Lipschitz,so that,
∆θn+1 −∆θn = α[f (θn)− f (θn−1)]
(a)≈ α∂f (θn)∆θn(b)= α2∂f (θn)f(θn−1)
(17)
where (a) follows from the assumption that f isLipschitz and C1, and (b) follows from (13). It followsthat ‖∆θn+1 −∆θn‖ = O(min{α2, α‖∆θn‖}). Thissuggests a heuristic: swap ∆θn+1 and ∆θn in agiven “convergent” algorithm to obtain a new algorithmthat is hopefully simpler, and has desirable properties.Applying this heuristic to (16) (replacing ∆θn with∆θn+1 on the right hand side), we obtain
∆θn+1 ≈Mn+1∆θn+1 + αf(θn)
Assuming that an inverse exists, this becomes
∆θn+1 ≈ α[I −Mn+1]−1f(θn) (18)
We thus arrive at a possible answer to the questionof optimal matrix momentum in (16): For the matrixsequence Mn+1 = I+α∂f (θn), the algorithm (16) canbe expressed
∆θn+1 = [I + α∂f (θn)]∆θn + αf(θn) (19)
751

The foregoing approximation in (18) suggest that thisis an approximation of Newton-Raphson (which is(13), with the scalar α replaced by the Jacobian−[∂f (θn)]−1): ∆θn+1 ≈ −[∂f (θn)]−1f(θn).
Further approximations lead to differentinterpretations: A Taylor series argument showsthat the recursion (19) is approximated by
∆θn+1 = ∆θn + α[f(θn)− f(θn−1)] + αf(θn) (20)
This is the special case of Nesterov’s algorithm (15) withµ = 1 and ζ = α.
A complete justification for the stochastic analogof (19) is provided through a coupling bound inProposition 3.2. It is found that similar transformationslead to new algorithms for RL and other applications.
III. OPTIMAL MATRIX MOMENTUM AND POLSAReturning to the stochastic setting, the PolSA
algorithm considered in this paper is a special case ofmatrix momentum SA (4), and an analog of (19):
PolSA Algorithm:
∆θn+1 = [I + ζAn+1]∆θn + αn+1ζfn+1(θn)(21)
where ζ > 0, and {An} are estimates of A(θn), withA(θ) := E[∂fn (θ)] (assumed independent of n).
The choice Gn ≡ ζI in (4) is imposed tosimplify exposition; in numerical examples it is observedthat a particular diagonal matrix gives much betterperformance in applications to Q-learning (details arecontained in Section V).
The main technical results are obtained for a linearmodel defined in (7) - (8). In this case we have A(θ) ≡A, and its estimates are obtained recursively:
An+1 = An +1
n+ 1(An+1 − An) (22)
The SNR algorithm is (3) in which Gn = A†n (theMoore–Penrose pseudo inverse):
SNR: ∆θn+1 = −αn+1A†n+1fn+1(θn) (23)
Additional simplifying assumptions are imposed toease analysis:
(A1) The stochastic process (An, bn) is wide-sensestationary, with common mean (A, b).
(A2) {An, bn} are bounded martingale differencesequences, adapted to the filtration Fn :=σ{Ak, bk :k ≤ n}
(A3) For any eigenvalue λ of A,
Real(λ) < 0 and |1 + ζλ| < 1 (24)
It is assumed without loss of generality that ζ = 1.Under Assumptions A1 and A2, the covariance matrixin (11) can be expressed
Σ∆ = E[∆∗n+1(∆∗n+1)T] (25)
Even in the linear setting, full stability and couplingarguments are not yet available because the assumptionsdo not ensure that A−1
n → A−1 in L2. The maintheoretical result of this section is therefore restrictedto establishing the relationship between the followingidealized versions of the SNR and PolSA algorithms,wherein we replace the estimates An with the exactvalue A:
SNR? : ∆θ∗n+1 =−αn+1A−1fn+1(θ∗n) (26)
PolSA? : ∆θn+1 = [I +A]∆θn + αn+1fn+1(θn) (27)
Proposition 3.1 establishes optimality of theasymptotic variance of the SNR algorithm (23); theproof is contained in Appendix A of [1].
Proposition 3.1: Suppose assumptions (A1)–(A3)hold. Then, the following holds for the estimates {θ•n}obtained using SNR algorithm (23) and {θ∗n} obtainedusing ideal SNR algorithm (26):
(i) The following representations hold for the errorsequences:
θ•n = −A−1n
1
n
n∑k=1
∆∗k (whenever A−1n exists) (28)
θ∗n = −A−1 1
n
n∑k=1
∆k (29)
Consequently, each converges to zero withprobability one.(ii) The scaled covariances Σn := nE[θ∗n(θ∗n)T] and
Σ22n := n2E[∆θ∗n(∆θ∗n)T] satisfy
limn→∞
Σn = limn→∞
Σ22n = Σ∗ (30)
with Σ∗ the optimal covariance defined in (12). �
A drawback with SNR is the matrix inversion.The PolSA algorithm is simpler and enjoys the sameattractive properties. This is established through thefollowing coupling result. The proof of Proposition 3.2,contained in Appendix B of [1], is a rigorous justificationof the heuristic used to construct the deterministicrecursion (19).
Proposition 3.2: Suppose assumptions (A1)–(A3)hold. Let {θ∗n} denote the iterates obtained using (26)and {θn} the iterates obtained using (27), with identicalinitial conditions. Then,
supn≥0
n2E[‖θn − θ∗n‖2] <∞ (31)
Consequently, the limits (30) hold for the PolSAalgorithm (27):
limn→∞
nE[θn(θn)T] = limn→∞
n2E[∆θn(∆θn)T] = Σ∗
�
752

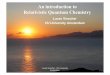
Σ∗(1, 1) = 1.3585 × 106
θ n(1
)Coupling for larger values of ζ
10 4-50
0
50
100
150
n
0.010.050.10.51.01.51.9
ζPolSASNR
1 2 3 4 5 6 7 8 9 10
Fig. 1. Coupling between PolSA and SNR occurs quickly for 0.5 ≤ ζ ≤ 1.9.
Other than the classical algorithms SNR and Polyak-Ruppert averaging technique, PolSA is the only otherknown algorithm that achieves optimal asymptoticvariance. The fact that it is a momentum basedtechnique, and that it does not fit into the class ofstandard SA algorithms makes the result quite special.
An illustration of the coupling is provided in Fig. 1for the linear model fn(θ) = Aθ + ∆n in which −A issymmetric and positive definite with λmax(−A) = 1, and{∆n} is i.i.d. and Gaussian. Shown are the trajectoriesof {θn(1) : n ≤ 105} (note that Σ∗(1, 1) is over onemillion).
Optimality of PolSA: It is conjectured thatProposition 3.2 on coupling of parameter estimatesobtained from (26) and (27) can be extended to show thatthe coupling result will hold even when we replace Awith any other d×d matrix M in both these recursions,as long as each eigenvalue λ of M satisfies (24).
The extended coupling result would then implythat the parameter estimates obtained using a matrixmomentum algorithm of the form (27), with momentumM , will have asymptotic variance ΣG that is obtainedas a solution to the Lyapunov equation (10), with G =−M−1, assuming invertibility.
Recall that Σ∗ defined in (12) is the optimal solutionto this Lyapunov equation, and is achieved whenG = −A−1. Assuming that the conjectures hold, thearugments above conclude that the matrix momentum[I +A] in (27) is optimal: No other matrix momentumcan achieve lower asymptotic variance.
Applications:
• Reinforcement learning: Section V describesapplication to Q-learning, and includes numericalexamples. Appendix D of [1] contains a full accountof TD-learning.• Stochastic optimization: A common application
of SA is convex optimization. In this setting, f(θ) =∇E[Jn(θ)] for a sequence of smooth functions {Jn},and then fn = −∇Jn. The theory developed in thispaper is directly applicable to this class of problems,except in degenerate cases. For comparison, considerthe quadratic optimization problem in which fn(θ) =Aθ−b+∆n, with −A > 0. The stability condition (24)
holds provided we choose ζ < 1/λmax(−A): a conditionfamiliar in the optimization literature.
IV. VARIANCE ANALYSIS OF NESA
The NeSA algorithm (5) has a finite asymptoticcovariance that can be expressed as the solution toa Lyapunov equation. We again restrict to the linearmodel, so that the recursion (5) (with ζ = 1, withoutloss of generality) becomes
∆θn+1 = [I+An+1]∆θn + αn+1[An+1θn−bn+1] (32)
Stability of the recursion requires a strengthening ofassumption (24). Define the linear operator L : Rd×d →Rd×d as follows: For any matrix Q ∈ Rd×d,
L(Q) := E[(I +An)Q(I +An)T] (33)
Define the 2d-dimensional vector processes Φn :=(√nθn, n∆θn)T, and
Σn := E[ΦnΦTn] =
[Σ11n Σ12
n
Σ21n Σ22
n
](34)
The following assumptions are imposed throughout thissection:
(N1) {An, bn} are bounded martingale differencesequences, adapted to the filtration Fn :=σ{Ak, bk :k ≤ n}. Moreover, for any matrix Q,
E[(I +An)Q(I +An)T | Fn−1] = L(Q)
(N2) The bounds in (24) hold for all eigenvalues λof A, and the spectral radius of L is strictly boundedby unity.(N3) The covariance sequence {Σn} defined in
(34) is bounded.In of [1, Appendix C] we discuss how (N3) can berelaxed.Proposition 4.1: Suppose that (N1) and (N2) hold.
Then,
limn→∞
Σn =
[Σ11∞ 00 Σ22
∞
](35)
in which the second limit is the solution to the Lyapunovequation
Σ22∞ = L(Σ22
∞) + Σ∆ (36)
753

(see [1, Appendix C.3] for an explicit expression), and
Σ11∞ = −Σ22
∞ −A−1Σ22∞ − Σ22
∞A−1 (37)
The following result is a corollary to Proposition 4.1,with an independent proof provided in [1, Appendix C].
Proposition 4.2: Under (N1)–(N3) the limit (35) ofProposition 4.1 holds for the PolSA recursion (27). Inthis case the solution to the Lyapunov equation is theoptimal covariance:
Σ11∞ = Σ∗ :=A−1Σ∆A−1T
(38)
and Σ22∞ ≥ 0 is the unique solution to the Lyapunov
equation
Σ22∞ = (I +A)Σ22
∞(I +A)T + Σ∆ (39)The main step in the proof of Proposition 4.1 involves
a finer look at the off-diagonal blocks of the covariancematrix Σn. The proofs of the following are contained inAppendix C of [1].
Lemma 4.3: The following approximations hold, withψn :=
√nΣ21
n : For n ≥ 1,
Σ22n+1 = L(Σ22
n ) + Σ∆ + o(1)
ψn = −Σ11n −A−1Σ22
∞ + o(1)(40)
The second iteration is used together with thefollowing result to obtain (37).
Lemma 4.4: The following approximation holds:
Σ11n+1 = Σ11
n + αn+1
(Σ11n +AΣ11
n +Σ11n A
T +Σ∆
+ ψTn(I+A)T + (I+A)ψn + L(Σ22
∞) + o(1)) (41)
Proof of Proposition 4.1:The first approximation in (40) combined with (N2)implies that the sequence {Σ22
n } is convergent, and thelimit is the solution to the fixed point equation (36)(details are provided in Appendix C.2 of [1]).
Substituting the approximation (40) for ψn into (41)and simplifying gives
Σ11n+1 = Σ11
n + αn+1
(− Σ11
n
− Σ22∞ −A−1Σ22
∞ − Σ22∞A
−1 + o(1))
This can be regarded as a Euler approximation to theODE:
d
dtxt = −xt − Σ22
∞ −A−1Σ22∞ − Σ22
∞A−1
SA theory can then be applied to establish that the limitsof {Σ11
n } and {xt} coincide with the stationary point,which is (37) [9]. �
V. APPLICATION TO Q-LEARNING
Consider a discounted cost MDP model with statespace X, action space U, cost function c : X × U → R,and discount factor β ∈ (0, 1). It is assumed that thestate and action space are finite: denote ` = |X|, `u =|U|, and Pu the ` × ` controlled transition probabilitymatrix.
The Q-function is the solution to the Bellmanequation:
Q∗(x, u)=c(x, u)+βE[Q∗(Xn+1) |Xn=x, Un=u] (42)
where, for any function Q : X × U → R Q(x) :=minuQ(x, u). The goal of Q-learning is to learn an
approximation to Q∗. Given d basis functions {φi :1 ≤ i ≤ d}, with each φi : X × U → R, and aparameter vector θ ∈ Rd, the Q-function estimate isdenoted Qθ(x, u) = θTφ(x, u).
Watkins’ Q-learning algorithm is designed to computethe exact Q-function that solves the Bellman equation(42) ([38], [39]). In this setting, the basis is taken to bethe set of indicator functions: φi(x, u) = I{x = xi, u =ui}, 1 ≤ i ≤ d, with d = |X × U|. The goal is to findθ∗ ∈ Rd such that f(θ∗) = 0, where, for any θ ∈ Rd,
f(θ) = E[φ(Xn, Un)
(c(Xn, Un) + βQθ(Xn+1)
−Qθ(Xn, Un))]
and the expectation is with respect to the steady statedistribution of the Markov chain.
The basic algorithm of Watkins can be written as [13]
∆θn+1 = αn+1Dn+1
[An+1θn − bn+1
](43)
in which the matrix gain Dn+1 is diagonal, with
Dn(i, i)−1 =1
n
n−1∑k=0
I{(Xk, Uk) = (xi, ui)},
and with πn(x) := arg minu
Qθn(x, u),
An+1 = φ(Xn, Un)[βφ(Xn+1, πn(Xn+1))− φ(Xn, Un)
]T
bn+1 = c(Xn, Un)φ(Xn, Un)
Among the other algorithms compared are
SNR: ∆θn+1 = −αn+1A−1n+1
[An+1θn − bn+1
]PolSA: ∆θn+1 = [I + An+1]∆θn
+ αn+1
[An+1θn − bn+1
]PolSA-D: ∆θn+1 = [I + Dn+1An+1]∆θn
+ αn+1Dn+1
[An+1θn − bn+1
]NeSA: ∆θn+1 = [I +An+1]∆θn
+ αn+1
[An+1θn − bn+1
]In each of these algorithms, (22) is used to recursivelyestimate An with An+1 defined above. We have taken
754

103 104 105 106 107100
101
102
103
104
105
103 104 105 106 107nn
Online Clock Sampling
WatkinsWatkins:
ZapPolSANeSA
1/(1−β)Bellm
an E
rror
Fig. 2. Bellman error resulting from application of different Q-learning algorithms to a shortest path problem with number ofstate-action pairs d = 117.
ζ = 1 in PolSA. The variant PolSA-D is (4) withGn+1 = Dn+1, and Mn+1 chosen so that coupling withSNR can be expected.
The SNR algorithm considered coincides with theZap Q-learning algorithm of [12], [13]. A simple 6-state MDP model was considered in this prior work,with the objective of finding the stochastic shortest path.Fig. 3 contains histograms of {√nθn} obtained from1000 parallel simulations of PolSA-D, SNR and NeSAalgorithms for this problem. It is observed that thehistograms of PolSA-D and SNR nearly coincide aftern = 106 iterations (performance for PolSA is similar).The histogram for NeSA shows a much higher variance,but the algorithm requires by-far the least computationper iteration. This is specifically true for Watkins’ Q-learning since An+1 is a sparse matrix, with just 2 non-zero entries.
-1 -0.5 0 0.5 1
SNR
-1 -0.5 0 0.5 1 104
104
PolSA
-2 -1 0 1 2 105
ExperimentalTheoretical
NeSA
Fig. 3. Histograms for entry 18 of {√nθn} for three
algorithms at iteration 106.
Experiments were also performed for larger examples.Results from two such experiments are shown in Fig. 2.The MDP model is once again a stochastic shortestpath problem. The model construction was based onthe creation of a graph with N nodes, in which theprobability of an edge between a pair of nodes is i.i.d.with probability p. Additional edges (i, i+1) are added,
for each i < N , to ensure the resulting graph is stronglyconnected.
The transition law is similar to that used in thefinite state-action example of [12]: with probability0.8 the agent moves in the desired direction, andwith remaining probability it ends up in one of theneighboring nodes, chosen uniformly. Two explorationrules were considered: the “online” version whereinat each iteration the agent randomly selects a feasibleaction (also known as asynchronous Q-learning), andthe offline “clock sampling” approach in which state-action pairs (xi, ui) are chosen sequentially (also knownas synchronous Q-learning). In the latter, at stage n,if (x, u) is the current state-action pair, a randomvariable X ′n+1 is chosen according to the distributionPu(x, · ), and the (x, u) entry of the Q-function isupdated according to the particular algorithm using thetriple (x, u,X ′n+1). A significant change to Watkins’iteration (43) in the synchronous setting is that Dn isreplaced by d−1I (since each state is visited the samenumber of times after each cycle). This combined withdeterministic sampling is observed to result in significantvariance reduction. The synchronous speedy Q-learningrecursion of [3] appears similar to the NeSA algorithmwith clock sampling.
Using the above described method, a random graphwas generated resulting in an MDP with d = 117state-action pairs. The plots in Fig. 2 show Bellmanerror as a function of iteration n (for definitions see[7], [13]). Comparison of the performance of algorithmsin a deterministic exploration setting versus the onlinesetting is also shown. The coupling of PolSA and theZap algorithms are easily observed in the clock samplingcase.
VI. CONCLUSIONS
It is exciting to see how the intuitive transformationfrom SNR to PolSA and NeSA can be justifiedtheoretically and in simulations. In Fig. 2, it isparticularly exciting to see the coupling of PolSA andZap (SNR) algorithms, even in the non-linear settingof Q-learning. While the covariance of NeSA is notoptimal, it is the simplest of the three algorithms and
755

is observed to perform well in applications.An important next step is to create adaptive techniques
to ensure fast coupling or other ways to ensure fastforgetting of the initial condition. It is possible thattechniques in [17] may be adapted to achieve this. Thework can be extended in several ways:
(i) It will be of great interest to pursue analysisof the proposed algorithms in the special caseof nonlinear optimization. It is possible that thestructure of the problem such as convexity of theobjective and smoothness of the gradients could helpus derive bounds on the transients.
(ii) In [12] we suggest that the SNR algorithm canbe extended to obtain theory for the convergenceof Q-learning with function approximation. Itwould be interesting to see how the PolSAand NeSA algorithms can be extended to thissetting. Applications to TD-learning with functionapproximation is discussed in [1, Appendix B].
REFERENCES
[1] A. M. Devraj, A. Busic, and S. Meyn, “Optimal matrixmomentum stochastic approximation and applications to Q-learning,” arXiv e-prints, p. arXiv:1809.06277, Sep 2018.
[2] Z. Allen-Zhu. Katyusha: The first direct acceleration ofstochastic gradient methods. ArXiv e-prints, Mar. 2016.
[3] M. G. Azar, R. Munos, M. Ghavamzadeh, and H. Kappen.Speedy Q-learning. In Advances in Neural InformationProcessing Systems, 2011.
[4] F. Bach and E. Moulines. Non-strongly-convex smooth stochasticapproximation with convergence rate o(1/n). In Advancesin Neural Information Processing Systems 26, pages 773–781.Curran Associates, Inc., 2013.
[5] A. Benveniste, M. Metivier, and P. Priouret. Adaptive algorithmsand stochastic approximations, volume 22 of Applicationsof Mathematics (New York). Springer-Verlag, Berlin, 1990.Translated from the French by Stephen S. Wilson.
[6] A. Benveniste, M. Metivier, and P. Priouret. Adaptive algorithmsand stochastic approximations. Springer, 2012.
[7] D. Bertsekas and J. N. Tsitsiklis. Neuro-Dynamic Programming.Atena Scientific, Cambridge, Mass, 1996.
[8] V. S. Borkar. Average cost dynamic programming equations forcontrolled Markov chains with partial observations. SIAM J.Control Optim., 39(3):673–681 (electronic), 2000.
[9] V. S. Borkar. Stochastic Approximation: A Dynamical SystemsViewpoint. Hindustan Book Agency and Cambridge UniversityPress (jointly), Delhi, India and Cambridge, UK, 2008.
[10] J. A. Boyan. Technical update: Least-squares temporal differencelearning. Mach. Learn., 49(2-3):233–246, 2002.
[11] A. Defazio, F. Bach, and S. Lacoste-Julien. Saga: A fastincremental gradient method with support for non-stronglyconvex composite objectives. In Advances in neural informationprocessing systems, pages 1646–1654, 2014.
[12] A. M. Devraj and S. Meyn. Zap Q-learning. In Advances inNeural Information Processing Systems, pages 2235–2244, 2017.
[13] A. M. Devraj and S. P. Meyn. Fastest convergence for Q-learning.ArXiv e-prints, July 2017.
[14] J. Duchi. Introductory lectures on stochastic optimization.Stanford Lecture Series, 2016.
[16] P. W. Glynn and S. P. Meyn. A Liapounov bound for solutionsof the Poisson equation. Ann. Probab., 24(2):916–931, 1996.
[15] S. Gadat, F. Panloup, and S. Saadane. Stochastic heavy ball.Electron. J. Statist., 12(1):461–529, 2018.
[17] P. Jain, S. M. Kakade, R. Kidambi, P. Netrapalli, and A. Sidford.Accelerating Stochastic Gradient Descent. ArXiv e-prints (andto appear, COLT 2018), Apr. 2017.
[18] T. Kailath. Linear systems, volume 156. Prentice-HallEnglewood Cliffs, NJ, 1980.
[19] V. R. Konda and J. N. Tsitsiklis. Convergence rate of lineartwo-time-scale stochastic approximation. Ann. Appl. Probab.,14(2):796–819, 2004.
[20] H. J. Kushner and G. G. Yin. Stochastic approximationalgorithms and applications, volume 35 of Applications ofMathematics (New York). Springer-Verlag, New York, 1997.
[21] N. Loizou and P. Richtarik. Momentum and StochasticMomentum for Stochastic Gradient, Newton, Proximal Point andSubspace Descent Methods. ArXiv e-prints, Dec. 2017.
[22] M. Metivier and P. Priouret. Applications of a Kushner andClark lemma to general classes of stochastic algorithms. IEEETransactions on Information Theory, 30(2):140–151, March1984.
[23] S. P. Meyn and R. L. Tweedie. Markov chains and stochasticstability. Cambridge University Press, Cambridge, secondedition, 2009. Published in the Cambridge Mathematical Library.1993 edition online.
[24] E. Moulines and F. R. Bach. Non-asymptotic analysis ofstochastic approximation algorithms for machine learning. InAdvances in Neural Information Processing Systems 24, pages451–459. Curran Associates, Inc., 2011.
[25] Y. Nesterov. A method of solving a convex programmingproblem with convergence rate O(1/k2). In Soviet MathematicsDoklady, 1983.
[26] Y. Nesterov. Efficiency of coordinate descent methods on huge-scale optimization problems. SIAM Journal on Optimization,22(2):341–362, 2012.
[27] B. T. Polyak. Some methods of speeding up the convergenceof iteration methods. USSR Computational Mathematics andMathematical Physics, 4(5):1–17, 1964.
[28] B. T. Polyak. Introduction to Optimization. OptimizationSoftware Inc, New York, 1987.
[29] B. T. Polyak. A new method of stochastic approximation type.Avtomatika i telemekhanika (in Russian). translated in Automat.Remote Control, 51 (1991), pages 98–107, 1990.
[30] B. T. Polyak and A. B. Juditsky. Acceleration of stochasticapproximation by averaging. SIAM J. Control Optim., 30(4):838–855, 1992.
[31] H. Robbins and S. Monro. A stochastic approximation method.Annals of Mathematical Statistics, 22:400–407, 1951.
[32] D. Ruppert. A Newton-Raphson version of the multivariateRobbins-Monro procedure. The Annals of Statistics, 13(1):236–245, 1985.
[33] R. S. Sutton. Learning to predict by the methods of temporaldifferences. Mach. Learn., 3(1):9–44, 1988.
[34] C. Szepesvari. Algorithms for reinforcement learning. Synthesislectures on artificial intelligence and machine learning, 4(1):1–103, 2010.
[35] C. Szepesvari. Algorithms for Reinforcement Learning. SynthesisLectures on Artificial Intelligence and Machine Learning.Morgan & Claypool Publishers, 2010.
[36] J. Tsitsiklis. Asynchronous stochastic approximation and Q-learning. Machine Learning, 16:185–202, 1994.
[37] J. N. Tsitsiklis and B. Van Roy. An analysis of temporal-difference learning with function approximation. IEEE Trans.Automat. Control, 42(5):674–690, 1997.
[38] C. J. C. H. Watkins. Learning from Delayed Rewards. PhDthesis, King’s College, Cambridge, Cambridge, UK, 1989.
[39] C. J. C. H. Watkins and P. Dayan. Q-learning. MachineLearning, 8(3-4):279–292, 1992.
756









![Eric Moulines LTCI arXiv:1306.2119v1 [cs.LG] 10 Jun 2013 · Discussion of assumptions. Assumptions (A1-5) are standard in stochastic approximation(see, e.g., [12, 6]). Note that for](https://img.dokumen.tips/doc/110x75/5eb888ec4cdadf430d4581d0/eric-moulines-ltci-arxiv13062119v1-cslg-10-jun-2013-discussion-of-assumptions.jpg)