Embed Size (px)
Citation preview
On Distributed Coordination in Robotic NetworksGossip Coverage and Frontier-based Pursuit
Joseph W. Durham
Center for Control, Dynamical Systems,and Computation
Department of Mechanical EngineeringUniversity of California at Santa Barbaramotion.mee.ucsb.edu/~joey
February 5, 2010
Joseph Durham (UCSB) Distributed Coordination Feb 5 1 / 45

Introduction
Distributed Coordination Algorithms
Team of robotic agents tasked with performing a joint mission in anenvironment
Each individualsenses its immediate surroundingscommunicates with nearby agentsprocesses information gatheredperforms local action in response
Algorithm design goalDesign individual control and communication laws such that the groupreaches a desired goal
Joseph Durham (UCSB) Distributed Coordination Feb 5 2 / 45

Introduction
Distributed Coordination Algorithms
Team of robotic agents tasked with performing a joint mission in anenvironment
Each individualsenses its immediate surroundingscommunicates with nearby agentsprocesses information gatheredperforms local action in response
Algorithm design goalDesign individual control and communication laws such that the groupreaches a desired goal
Joseph Durham (UCSB) Distributed Coordination Feb 5 2 / 45

Introduction
Applications
Ocean monitoring gliders from noc.soton.ac.uk, warehouse robots from KIVA Systems,
hopping planetary explores from NASA
Joseph Durham (UCSB) Distributed Coordination Feb 5 3 / 45

Introduction
Papers in this Talk
J. W. Durham, A. Franchi, and F. Bullo. Distributed pursuit-evasion with limited-visibility
sensors via frontier-based exploration. In IEEE Int. Conf. on Robotics and Automation,
Anchorage, Alaska, May 2010. To appear
J. W. Durham, R. Carli, P. Frasca, and F. Bullo. Discrete partitioning and coverage control
with gossip communication. In ASME Dynamic Systems and Control Conference,
Hollywood, CA, October 2009
J. W. Durham and F. Bullo. Smooth nearness-diagram navigation. In IEEE/RSJ Int. Conf.
on Intelligent Robots & Systems, pages 690–695, Nice, France, September 2008
Collaborators: Ruggero Carli, Antonio Franchi, Paolo Frasca, and myadvisor Francesco Bullo.
Joseph Durham (UCSB) Distributed Coordination Feb 5 4 / 45

Introduction
Outline
1 Introduction
2 Robotic Network Model
3 Gossip CoverageProblem sketchCurrent resultsFuture directions
4 Frontier-based Pursuit-EvasionProblem sketchCurrent resultsFuture directions
5 Conclusion
Joseph Durham (UCSB) Distributed Coordination Feb 5 5 / 45
Robotic Network Model
1 Introduction
2 Robotic Network Model
3 Gossip CoverageProblem sketchCurrent resultsFuture directions
4 Frontier-based Pursuit-EvasionProblem sketchCurrent resultsFuture directions
5 Conclusion
Joseph Durham (UCSB) Distributed Coordination Feb 5 6 / 45

Robotic Network Model
Hardware
Joseph Durham (UCSB) Distributed Coordination Feb 5 7 / 45
Robotic Network Model
Robot Model
Differential driveTranslational velocity vRotational velocity θ
Physical stateX = (x , y , θ)
In practice measurement of actual ve-locities is imperfect, integrals diverge
Either must accept position errors oruse sensors for localization
Joseph Durham (UCSB) Distributed Coordination Feb 5 8 / 45

Robotic Network Model
Robot Model
Differential driveTranslational velocity vRotational velocity θ
Physical stateX = (x , y , θ)
In theory state is an integral of veloci-ties
Either must accept position errors oruse sensors for localization
Joseph Durham (UCSB) Distributed Coordination Feb 5 8 / 45

Robotic Network Model
Robot Model
Differential driveTranslational velocity vRotational velocity θ
Physical stateX = (x , y , θ)
In practice measurement of actual ve-locities is imperfect, integrals diverge
Either must accept position errors oruse sensors for localization
Joseph Durham (UCSB) Distributed Coordination Feb 5 8 / 45

Robotic Network Model
Robot Model
Differential driveTranslational velocity vRotational velocity θ
Physical stateX = (x , y , θ)
In practice measurement of actual ve-locities is imperfect, integrals diverge
Either must accept position errors oruse sensors for localization
Joseph Durham (UCSB) Distributed Coordination Feb 5 8 / 45

Robotic Network Model
Sensor Model
Sensor footprintS(x , y , θ) is the intersection of visibilitypolygon from (x , y) and the area per-ceivable by the sensor oriented by θ
Sensor footprint can be used for:Obstacle detectionLocalizationIntruder detection
Joseph Durham (UCSB) Distributed Coordination Feb 5 9 / 45

Robotic Network Model Control and Communication
Control and Communication Models
Processor StateW: the state of the robot’s processor – stored data, current behavior
Communication AlphabetL: set of messages a robot can send to other robots
Joseph Durham (UCSB) Distributed Coordination Feb 5 10 / 45

Robotic Network Model Control and Communication
Network Connectivity Models
Communication GraphMany possible models for whichagents can communicate
Combinations of:Network geometryPhysical proximityCurrent robot rolesRandomness
Joseph Durham (UCSB) Distributed Coordination Feb 5 11 / 45

Robotic Network Model Software
Robotic Software Overview
Player interfaces
NavigationSoftware
Control & CommunicationAlgorithm
To/from other agents
Joseph Durham (UCSB) Distributed Coordination Feb 5 12 / 45

Robotic Network Model Software
Robotic Software Overview
Player interfaces
NavigationSoftware
Control & CommunicationAlgorithm
To/from other agents
Player/Stage is an open-sourcerobotics software library
FeaturesPlayer provides interfacesfor hardwareEach robot is a server on aTCP/IP networkStage simulates hardware,interfaces to algorithms arethe same
Joseph Durham (UCSB) Distributed Coordination Feb 5 12 / 45

Robotic Network Model Software
Robotic Software Overview
Player interfaces
NavigationSoftware
Control & CommunicationAlgorithm
To/from other agents
SND Navigation handles localpath planning and execution
Algorithm design can focus on:Desired positioning ofrobotCommunication forcoordination
Joseph Durham (UCSB) Distributed Coordination Feb 5 12 / 45

Robotic Network Model Software
Smooth Nearness Diagram Navigation
Evolution of ND+ Nav by J. Mingues,J. Osuna, L. Montano
Input: S, desired pose (x , y , θ)
Output: v and θ
Find gaps in sensor footprint
Pick best gap to drive towardsAdjust commands based onnearby obstacles
Available as the snd driver inPlayer/Stage
Joseph Durham (UCSB) Distributed Coordination Feb 5 13 / 45

Robotic Network Model Software
Smooth Nearness Diagram Navigation
Evolution of ND+ Nav by J. Mingues,J. Osuna, L. Montano
Input: S, desired pose (x , y , θ)
Output: v and θ
Find gaps in sensor footprint
Pick best gap to drive towardsAdjust commands based onnearby obstacles
Available as the snd driver inPlayer/Stage
Joseph Durham (UCSB) Distributed Coordination Feb 5 13 / 45

Robotic Network Model Software
Smooth Nearness Diagram Navigation
Evolution of ND+ Nav by J. Mingues,J. Osuna, L. Montano
Input: S, desired pose (x , y , θ)
Output: v and θ
Find gaps in sensor footprintPick best gap to drive towards
Adjust commands based onnearby obstacles
Available as the snd driver inPlayer/Stage
Joseph Durham (UCSB) Distributed Coordination Feb 5 13 / 45

Robotic Network Model Software
Smooth Nearness Diagram Navigation
Evolution of ND+ Nav by J. Mingues,J. Osuna, L. Montano
Input: S, desired pose (x , y , θ)
Output: v and θ
Find gaps in sensor footprintPick best gap to drive towardsAdjust commands based onnearby obstacles
Available as the snd driver inPlayer/Stage
Joseph Durham (UCSB) Distributed Coordination Feb 5 13 / 45

Robotic Network Model Software
Smooth Nearness Diagram Navigation
Evolution of ND+ Nav by J. Mingues,J. Osuna, L. Montano
Input: S, desired pose (x , y , θ)
Output: v and θ
Find gaps in sensor footprintPick best gap to drive towardsAdjust commands based onnearby obstacles
Available as the snd driver inPlayer/Stage
Joseph Durham (UCSB) Distributed Coordination Feb 5 13 / 45

Robotic Network Model Software
Summary of Robotic Network Model
Algorithm Design Requirements1 Data structures
Correct or account for errors in (x , y , θ)Processor stateW and communication alphabet L
2 Update functionsMessage-generation functionProcessor state transition functionMotion control function to pick desired pose
3 Communication graph model
Joseph Durham (UCSB) Distributed Coordination Feb 5 14 / 45

Gossip Coverage
1 Introduction
2 Robotic Network Model
3 Gossip CoverageProblem sketchCurrent resultsFuture directions
4 Frontier-based Pursuit-EvasionProblem sketchCurrent resultsFuture directions
5 Conclusion
Joseph Durham (UCSB) Distributed Coordination Feb 5 15 / 45

Gossip Coverage Problem sketch
Motivation
Biological examples of coverage control
Tilapia mossambica, Barlow et al ’74 Sage sparrows, Petersen et al ’87
Joseph Durham (UCSB) Distributed Coordination Feb 5 16 / 45

Gossip Coverage Problem sketch
Related Prior Work I
Lloyd’s Algorithm
take convex environment Q with density function φ : Q → R≥0
place N robots at p = p1, . . . ,pNpartition environment into v = v1, . . . , vNdefine expected quadratic deviation
H(v ,p) =
∫v1
f (‖q − p1‖)φ(q)dq + . . .+
∫vN
f (‖q − pN‖)φ(q)dq
Theorem (Lloyd ’57 “least-square quantization”)1 at fixed partition, optimal positions are centroids2 at fixed positions, optimal partition is Voronoi3 Lloyd algorithm: alternate p-v optimization
−→ convergence to the set of centroidal Voronoi partitions
Joseph Durham (UCSB) Distributed Coordination Feb 5 17 / 45

Gossip Coverage Problem sketch
Related Prior Work I
Lloyd’s Algorithm
take convex environment Q with density function φ : Q → R≥0
place N robots at p = p1, . . . ,pNpartition environment into v = v1, . . . , vNdefine expected quadratic deviation
H(v ,p) =
∫v1
f (‖q − p1‖)φ(q)dq + . . .+
∫vN
f (‖q − pN‖)φ(q)dq
Theorem (Lloyd ’57 “least-square quantization”)1 at fixed partition, optimal positions are centroids2 at fixed positions, optimal partition is Voronoi3 Lloyd algorithm: alternate p-v optimization
−→ convergence to the set of centroidal Voronoi partitions
Joseph Durham (UCSB) Distributed Coordination Feb 5 17 / 45

Gossip Coverage Problem sketch
Related Prior Work II
Distributed Coverage Control
At each comm round:
1: acquire neighbors’ positions2: compute Voronoi region3: move towards centroid of
own Voronoi region
Result: convergence to the setof centroidal Voronoi partitions
J. Cortés, S. Martínez, T. Karatas, and F. Bullo.
Coverage control for mobile sensing networks.
IEEE Transactions on Robotics and Automa-
tion, 20(2):243–255, 2004
Joseph Durham (UCSB) Distributed Coordination Feb 5 18 / 45

Gossip Coverage Problem sketch
Related Prior Work III
Gossip coverage in continuous spacePairwise territory exchange between neighborsRegions may be non-convex during evolutionResult: convergence to the set of centroidal Voronoi partitions
P. Frasca, R. Carli, and F. Bullo. Multiagent coverage algorithms with gossip com-
munication: control systems on the space of partitions, March 2009. Available at
http://arXiv.org/abs/0903.3642
Joseph Durham (UCSB) Distributed Coordination Feb 5 19 / 45
Gossip Coverage Current results
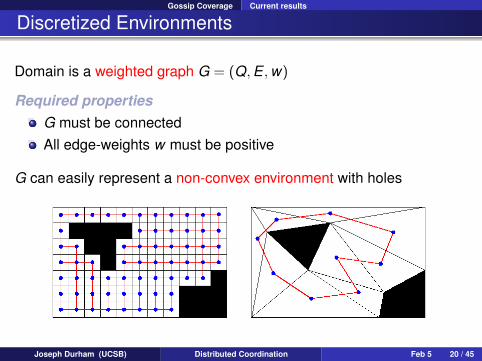
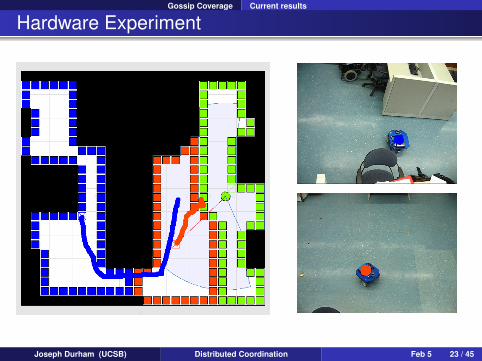
Discretized Environments
Domain is a weighted graph G = (Q,E ,w)
Required propertiesG must be connectedAll edge-weights w must be positive
G can easily represent a non-convex environment with holes
Joseph Durham (UCSB) Distributed Coordination Feb 5 20 / 45

Gossip Coverage Current results
Voronoi Iteration on Graphs
Distances are shortest pathlengths in connected
sub-graphs of G
Vertices join partition of centroidthey are closest to
Joseph Durham (UCSB) Distributed Coordination Feb 5 21 / 45

Gossip Coverage Current results
Cost Function
Centroid pi of sub-graph vi is vertex which minimizes
Hi(h, vi) =∑k∈vi
distvi (h, k)
Total cost
Hmulti-center(p, v) =N∑
i=1
Hi(pi , vi)
Minimize expected distance between random vertex and closest robot
Joseph Durham (UCSB) Distributed Coordination Feb 5 22 / 45

Gossip Coverage Current results
Cost Function
Centroid pi of sub-graph vi is vertex which minimizes
Hi(h, vi) =∑k∈vi
distvi (h, k)
Total cost
Hmulti-center(p, v) =N∑
i=1
Hi(pi , vi)
Minimize expected distance between random vertex and closest robot
Joseph Durham (UCSB) Distributed Coordination Feb 5 22 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45
Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Hardware Experiment
Joseph Durham (UCSB) Distributed Coordination Feb 5 23 / 45

Gossip Coverage Current results
Simulation Movie
Joseph Durham (UCSB) Distributed Coordination Feb 5 24 / 45
Gossip Coverage Current results
Gossip Coverage Assumptions
Map assumptions:Team is provided an initial connected N-partition of environment
Initial agent partitions are connectedCover space without overlap
Communication assumptions:Given infinite time, each agent will talk to each of its neighbors aninfinite number of timesTwo options:
There exists a finite upper bound on the time betweenconversations for each pairThere is a non-zero probability for each pairwise communicationoccurring at all times
Joseph Durham (UCSB) Distributed Coordination Feb 5 25 / 45

Gossip Coverage Current results
Gossip Coverage Assumptions
Map assumptions:Team is provided an initial connected N-partition of environment
Initial agent partitions are connectedCover space without overlap
Communication assumptions:Given infinite time, each agent will talk to each of its neighbors aninfinite number of timesTwo options:
There exists a finite upper bound on the time betweenconversations for each pairThere is a non-zero probability for each pairwise communicationoccurring at all times
Joseph Durham (UCSB) Distributed Coordination Feb 5 25 / 45

Gossip Coverage Current results
Algorithm Claims
1 Maintain connectedN-partition during evolution
Each region is connectedNo overlap
2 Total cost decreases wheneveragents exchange territory
3 Provable convergence to asingle centroidal Voronoipartition in finite time
Joseph Durham (UCSB) Distributed Coordination Feb 5 26 / 45

Gossip Coverage Current results
Convergence Theorem
X finite set of connected N-partitions of graph GAlgorithm defines set-valued map T : X → X
Version of the LaSalle Invariance PrincipleRequirements for convergence
1 X is compact, positively invariant under T2 Hmulti-center non-increasing under T , decreasing under T \ id3 Hmulti-center and T are continuous on X4 One of two communication assumptions
There exists a finite upper bound on the time betweenconversations for each pair (i , j)There is a non-zero probability for each pair (i , j) to communicate atall times
Joseph Durham (UCSB) Distributed Coordination Feb 5 27 / 45

Gossip Coverage Current results
Convergence Theorem
X finite set of connected N-partitions of graph GAlgorithm defines set-valued map T : X → X
Version of the LaSalle Invariance PrincipleRequirements for convergence
1 X is compact, positively invariant under T2 Hmulti-center non-increasing under T , decreasing under T \ id3 Hmulti-center and T are continuous on X4 One of two communication assumptions
There exists a finite upper bound on the time betweenconversations for each pair (i , j)There is a non-zero probability for each pair (i , j) to communicate atall times
Joseph Durham (UCSB) Distributed Coordination Feb 5 27 / 45

Gossip Coverage Current results
Computational Complexity
Hi(h, vi) =∑k∈vi
distvi (h, k)
Key computationDistances from h to all k ∈ vi
If edge-weights are uniform, can use BFS in linear timeOtherwise, must use Dijkstra in log-linear time
Computing centroidMost computationally complex piece, three options:
Exhaustive search in O(|vi |2)
Gradient descent in O(|vi | log |vi |)Center of mass approximation in O(|vi |)
Joseph Durham (UCSB) Distributed Coordination Feb 5 28 / 45

Gossip Coverage Current results
Computational Complexity
Hi(h, vi) =∑k∈vi
distvi (h, k)
Key computationDistances from h to all k ∈ vi
If edge-weights are uniform, can use BFS in linear timeOtherwise, must use Dijkstra in log-linear time
Computing centroidMost computationally complex piece, three options:
Exhaustive search in O(|vi |2)
Gradient descent in O(|vi | log |vi |)Center of mass approximation in O(|vi |)
Joseph Durham (UCSB) Distributed Coordination Feb 5 28 / 45

Gossip Coverage Current results
Summary
Chief contributionsConverge to a single centroidal Voronoi partition in finite timeCoverage control which works in non-convex environments withholesComputation can scale well to large areas with many robots
Joseph Durham (UCSB) Distributed Coordination Feb 5 29 / 45

Gossip Coverage Future directions
Ongoing Work in Coverage Control
Current directions
Motion protocolAgents will patrol boundary of territory to meet neighborsCan model need to meet neighbors as tasks on boundary
Local broadcast communicationMore realistic model of wireless communicationRequires overlapping territories during evolution
Joseph Durham (UCSB) Distributed Coordination Feb 5 30 / 45

Frontier-based Pursuit-Evasion
1 Introduction
2 Robotic Network Model
3 Gossip CoverageProblem sketchCurrent resultsFuture directions
4 Frontier-based Pursuit-EvasionProblem sketchCurrent resultsFuture directions
5 Conclusion
Joseph Durham (UCSB) Distributed Coordination Feb 5 31 / 45

Frontier-based Pursuit-Evasion Problem sketch
Our Clearing Problem
T34 security bot from tmsuk and Alacom in Japan
The Team: Robots with limited-range sensors
The Mission: Guarantee detection of any evaders in an unknownenvironment
Joseph Durham (UCSB) Distributed Coordination Feb 5 32 / 45

Frontier-based Pursuit-Evasion Problem sketch
Exploration Inspiration
ObservationClearing an environment is a con-strained form of exploration
For stationary evaders,cleared = exploredOtherwise, cleared can berecontaminated
Joseph Durham (UCSB) Distributed Coordination Feb 5 33 / 45

Frontier-based Pursuit-Evasion Problem sketch
Exploration Inspiration
For explorationFrontier: Boundary between ex-plored and unexplored areas
For pursuit-evasionFrontier: Boundary betweencleared and contaminated areas
Our ApproachCompletely cover frontier at alltimesContinuously push backfrontier
Joseph Durham (UCSB) Distributed Coordination Feb 5 33 / 45

Frontier-based Pursuit-Evasion Problem sketch
Exploration Inspiration
For explorationFrontier: Boundary between ex-plored and unexplored areas
For pursuit-evasionFrontier: Boundary betweencleared and contaminated areas
Our ApproachCompletely cover frontier at alltimesContinuously push backfrontier
Joseph Durham (UCSB) Distributed Coordination Feb 5 33 / 45

Frontier-based Pursuit-Evasion Problem sketch
Exploration Inspiration
For explorationFrontier: Boundary between ex-plored and unexplored areas
For pursuit-evasionFrontier: Boundary betweencleared and contaminated areas
Our ApproachCompletely cover frontier at alltimesContinuously push backfrontier
Joseph Durham (UCSB) Distributed Coordination Feb 5 33 / 45
Frontier-based Pursuit-Evasion Problem sketch
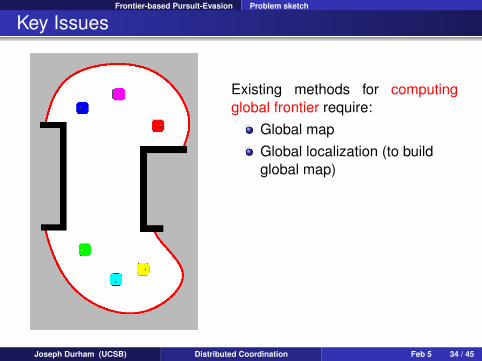
Key Issues
Existing methods for computingglobal frontier require:
Global mapGlobal localization (to buildglobal map)
Our new method requires:Complete coverage of frontierat all timesMutual localization betweenneighboring robots
Joseph Durham (UCSB) Distributed Coordination Feb 5 34 / 45

Frontier-based Pursuit-Evasion Problem sketch
Key Issues
Existing methods for computingglobal frontier require:
Global mapGlobal localization (to buildglobal map)
Our new method requires:Complete coverage of frontierat all timesMutual localization betweenneighboring robots
Joseph Durham (UCSB) Distributed Coordination Feb 5 34 / 45

Frontier-based Pursuit-Evasion Current results
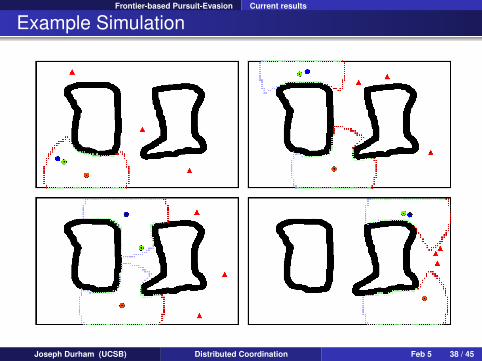
Distributed Algorithm Roles
Expand
Frontier-Guard
Follow
Wander
Leaders
Frontier-Guard: Key role for al-gorithm. Cover local frontier anddispatch agents to expand it.Expand: Agent moving to aviewpoint it was assigned.
Non-Leaders
Follow: Waiting for orders froma guard.Wander: Cleared local area,now searching for a guard to fol-low.
Joseph Durham (UCSB) Distributed Coordination Feb 5 35 / 45

Frontier-based Pursuit-Evasion Current results
Distributed Global Frontier
Each frontier-guard stores its localoriented frontier arcs
Frontier UpdatingWhen a new guard reaches itsviewpoint, it must:
1 Ask for frontier arcs fromneighboring guards
2 Inform neighbors of frontiersegments inside footprint
3 Classify local frontier based onintersections
Joseph Durham (UCSB) Distributed Coordination Feb 5 36 / 45
Frontier-based Pursuit-Evasion Current results
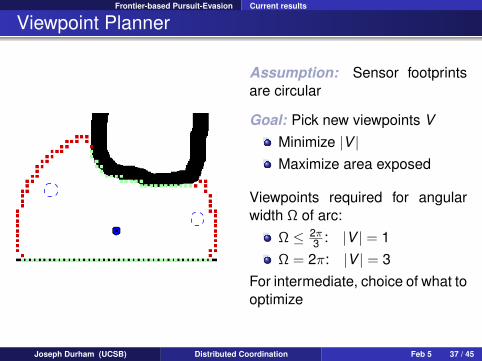
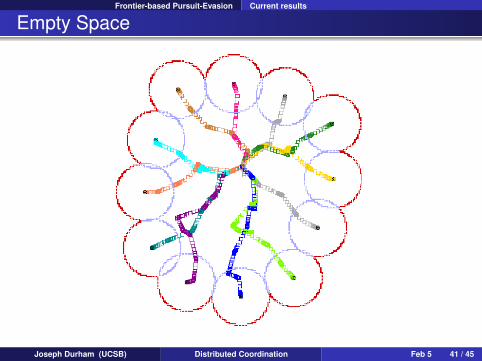
Viewpoint Planner
Assumption: Sensor footprintsare circular
Goal: Pick new viewpoints VMinimize |V |Maximize area exposed
Viewpoints required for angularwidth Ω of arc:
Ω ≤ 2π3 : |V | = 1
Ω = 2π: |V | = 3For intermediate, choice of what tooptimize
Joseph Durham (UCSB) Distributed Coordination Feb 5 37 / 45
Frontier-based Pursuit-Evasion Current results
Example Simulation
Joseph Durham (UCSB) Distributed Coordination Feb 5 38 / 45

Frontier-based Pursuit-Evasion Current results
Movie
Joseph Durham (UCSB) Distributed Coordination Feb 5 39 / 45

Frontier-based Pursuit-Evasion Current results
Frontier Coverage
0 5 10 15 20 25 30 350%
20%
40%
60%
80%
100%
Iteration Number
Perc
ent
Are
a C
leare
d
0
30
60
90
120
150
Fro
nti
er
Cell
s P
er
Guard
Frontier cell count per guard does not grow with area clearedDistributed storage requires only constant memory per agent
Joseph Durham (UCSB) Distributed Coordination Feb 5 40 / 45
Frontier-based Pursuit-Evasion Current results
Empty Space
Joseph Durham (UCSB) Distributed Coordination Feb 5 41 / 45

Frontier-based Pursuit-Evasion Current results
Summary
Chief contributionsOnline clearing algorithm which works in non-convexenvironments with holesDistributed storage and updating of global frontierRequires only mutual localization
Joseph Durham (UCSB) Distributed Coordination Feb 5 42 / 45

Frontier-based Pursuit-Evasion Future directions
Ongoing Work in Pursuit-Evasion
Current directions
Distributed hardware implementation and experimentsViewpoint planner for circular sector sensor footprintsBounds on number of agents necessary to clear a map
Joseph Durham (UCSB) Distributed Coordination Feb 5 43 / 45

Conclusion
Conclusion
Distributed coordination algorithm framework for hardwareTwo parallel algorithm implementations:
1 Coverage of discretized environments2 Frontier-based pursuit-evasion
Joseph Durham (UCSB) Distributed Coordination Feb 5 44 / 45

Conclusion
The End
Questions?
Joseph Durham (UCSB) Distributed Coordination Feb 5 45 / 45





























