Embed Size (px)
Citation preview
Principles of inertial sensing technology and its applications in IHCI
Intelligent Human‐Computer‐InteractionSS 2011
Gabriele [email protected]
Motivation
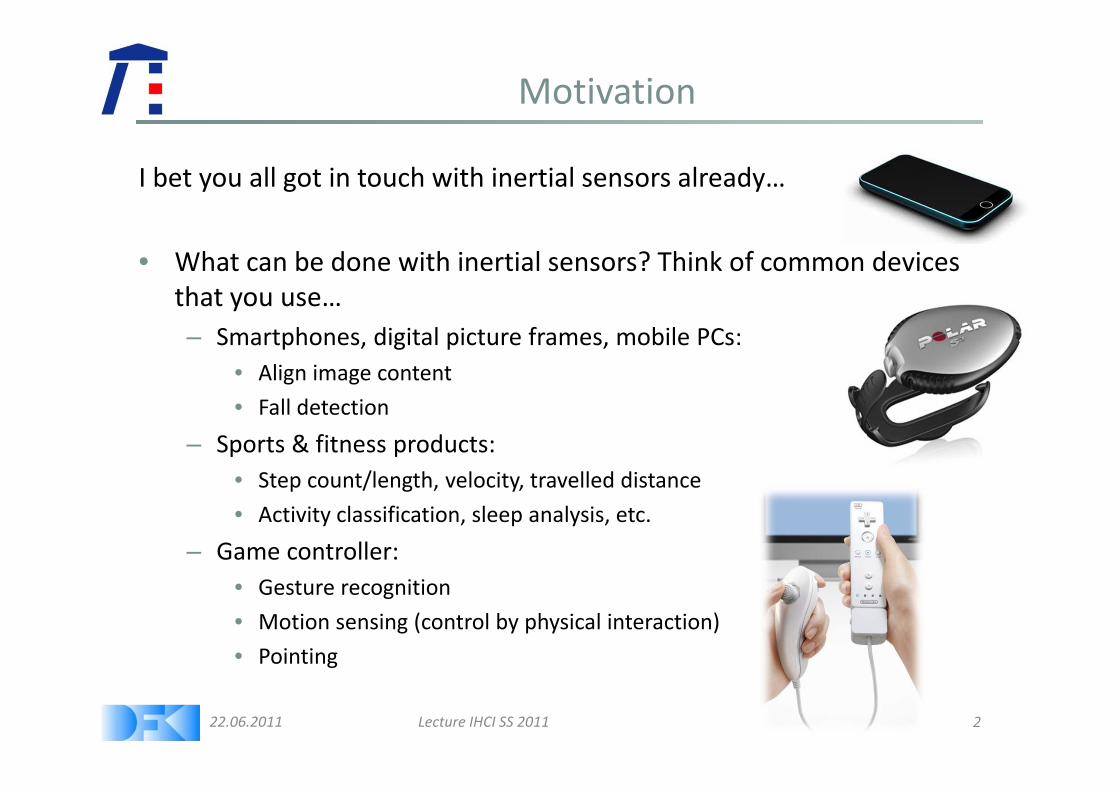
I bet you all got in touch with inertial sensors already…
• What can be done with inertial sensors? Think of common devices that you use…– Smartphones, digital picture frames, mobile PCs:
• Align image content• Fall detection
– Sports & fitness products: • Step count/length, velocity, travelled distance• Activity classification, sleep analysis, etc.
– Game controller:• Gesture recognition• Motion sensing (control by physical interaction)• Pointing
22.06.2011 Lecture IHCI SS 2011 2

Motivation
• What do you know about inertial sensors?– Accelerometers:
• Measure linear acceleration(body acceleration + gravitational acceleration)
• When non‐accelerating: “indicate up‐down direction”
– Gyroscopes:• Measure angular velocity around an instantaneous axis (turning rate)
22.06.2011 Lecture IHCI SS 2011 3

Motivation: trends in the game industry
22.06.2011 Lecture IHCI SS 2011 4
Yesterday:• Classic controller
(gamepad, joystick)• Button presses, stick control
Today:• Controller with motion sensing
capability (mostly inertial, magnetic and optical sensors)
• Gestures, motion physical interaction more intuitive
• Games involving physical interaction (fitness & health)
http://www.wikipedia.org
Motivation: game controllers
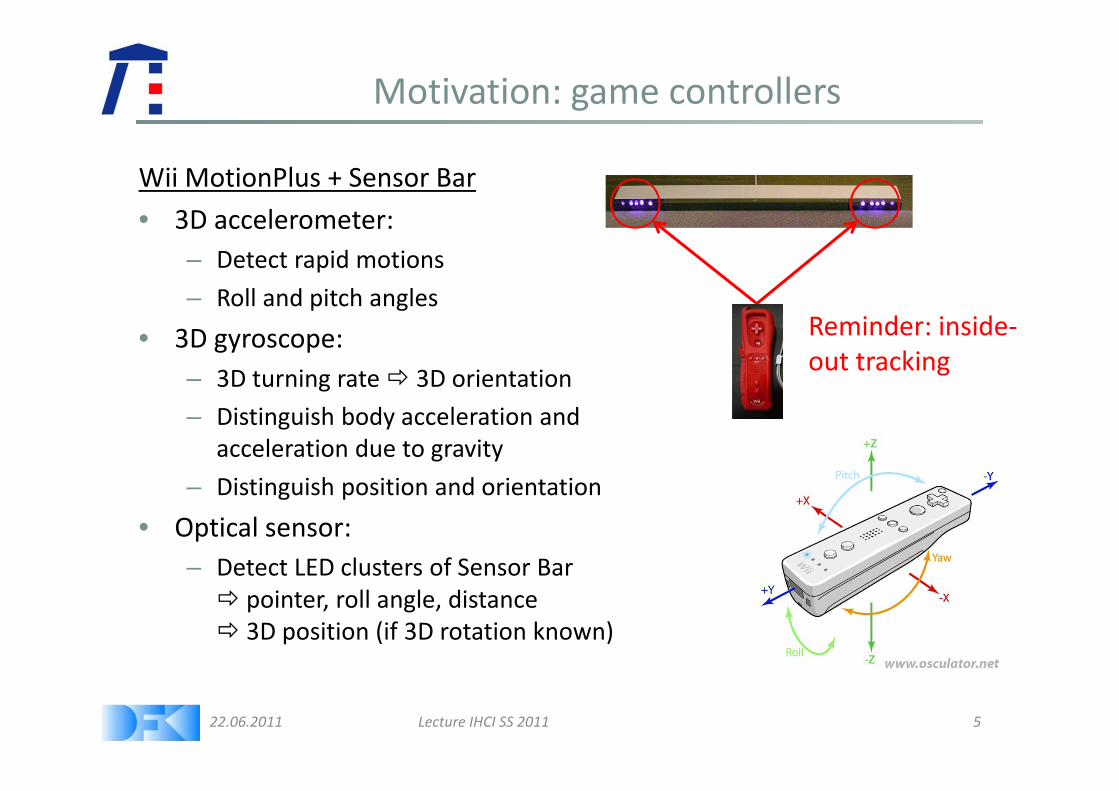
Wii MotionPlus + Sensor Bar• 3D accelerometer:
– Detect rapid motions– Roll and pitch angles
• 3D gyroscope:– 3D turning rate 3D orientation– Distinguish body acceleration and
acceleration due to gravity– Distinguish position and orientation
• Optical sensor:– Detect LED clusters of Sensor Bar pointer, roll angle, distance 3D position (if 3D rotation known)
22.06.2011 Lecture IHCI SS 2011 5
Reminder: inside‐out tracking
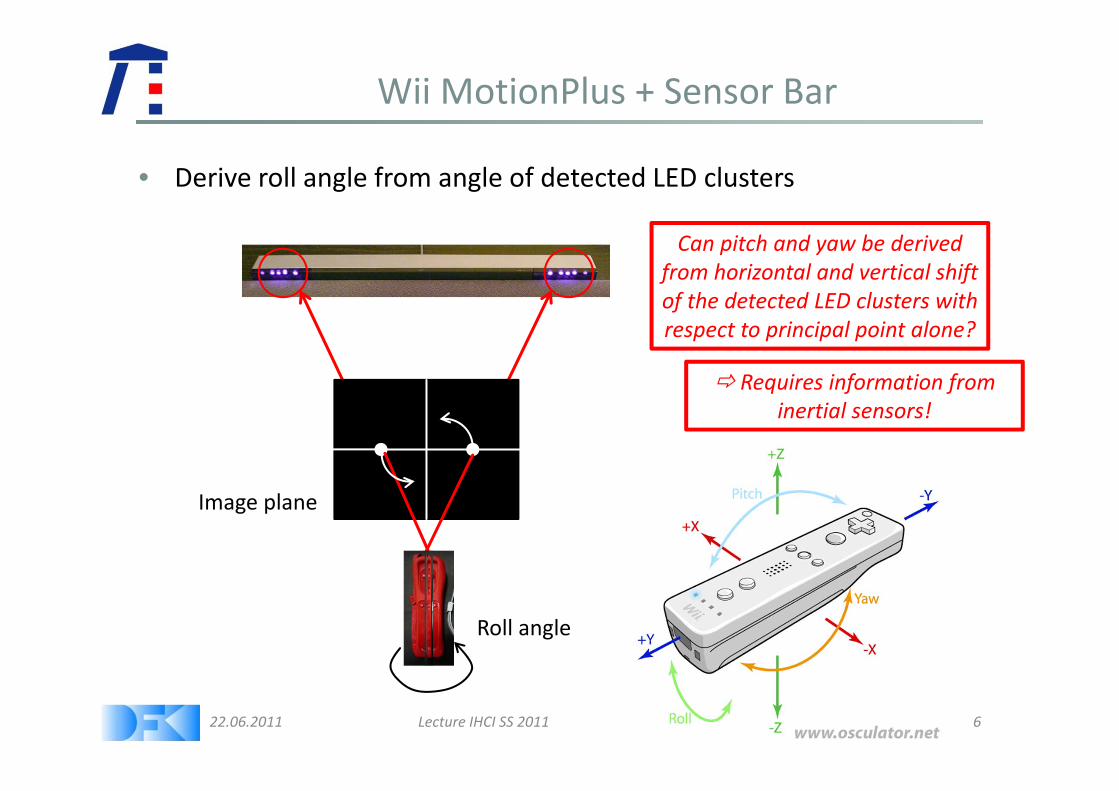
Wii MotionPlus + Sensor Bar
• Derive roll angle from angle of detected LED clusters
22.06.2011 Lecture IHCI SS 2011 6
Image plane
Roll angle
Can pitch and yaw be derived from horizontal and vertical shift of the detected LED clusters with respect to principal point alone?
Requires information from inertial sensors!

Motivation: game controllers
PlayStation Move + Eye Camera• 3D accelerometer, 3D gyroscope, 3D compass in the controller:
– Drift‐free 3D orientation– Compass: drift correction for yaw angle– Temporary dead reckoning for position (during occlusion)
• LED orb + external camera:– Detect orb 3D controller position (distance by size of orb in image)
22.06.2011 Lecture IHCI SS 2011
Reminder: outside‐in tracking
Z
7
Outline
Until here……motivation and a lot of (new) terms:
– Gyroscope, turning rate– Accelerometer, body acceleration vs. gravity– Compass, heading direction– 3D orientation: yaw, pitch, roll angles– Drift (correction)– Dead‐reckoning
Now……the technologies and principles behind
22.06.2011 Lecture IHCI SS 2011 8
Outline
1. Inertial sensor basics2. Inertial measurement units (IMUs)3. Orientation estimation principles4. Orientation and position estimation principles5. Outlook: advanced applications
22.06.2011 Lecture IHCI SS 2011 9

Inertial sensor basics
• Why do we call accelerometers and gyroscopes inertial sensors?• Their functionalities are based on the principle of inertia,
stating the resistance of an object to a change in its state of motion or rest/to be accelerated.
• Many different types and categories of inertial sensors available• Here: micro‐machined electromechanical systems (MEMS)
technology– Small size, low weight, low power consumption, etc.– But also reduced accuracy and bias stability
22.06.2011 Lecture IHCI SS 2011 10
Accelerometers
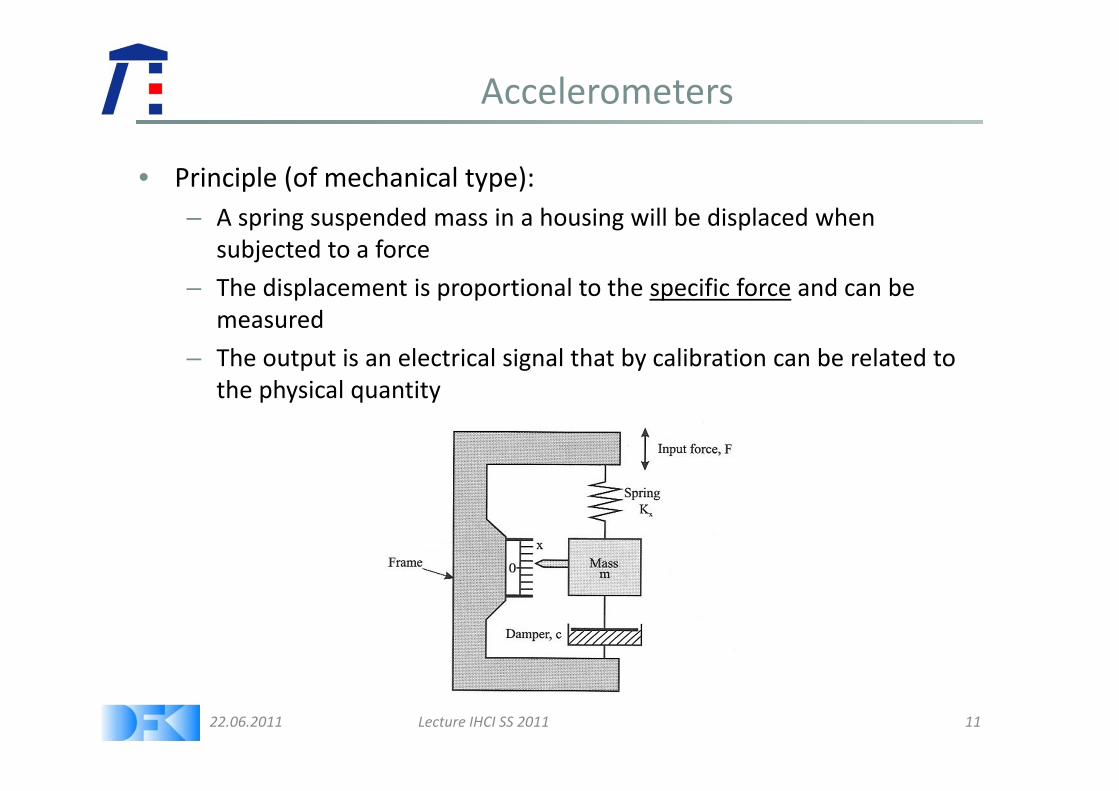
• Principle (of mechanical type): – A spring suspended mass in a housing will be displaced when
subjected to a force– The displacement is proportional to the specific force and can be
measured– The output is an electrical signal that by calibration can be related to
the physical quantity
22.06.2011 Lecture IHCI SS 2011 11

Accelerometers
• Measurement in 1D: – Specific force, f, in direction of sensitive axis, n:
• Assuming perfect calibration:– What does an accelerometer measure when lying still with the
sensitive axis leveled? 9.81 m/s2 (assuming positive axis points up)
– What is measured in free fall with sensitive axis leveled? 0 m/s2
22.06.2011 Lecture IHCI SS 2011 12
Gravity
Acceleration
Sensitive axis
Accelerometers measure the difference between body acceleration and gravity acceleration compared to free fall
Reminder: translational motion
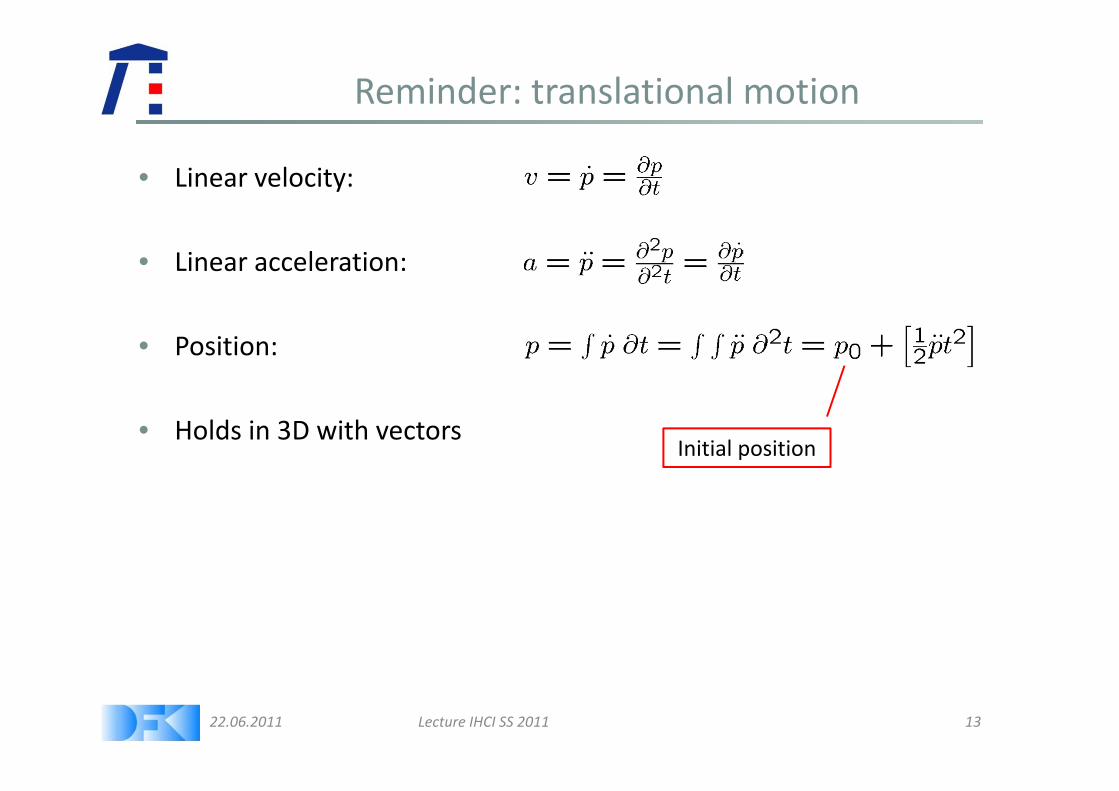
• Linear velocity:
• Linear acceleration:
• Position:
• Holds in 3D with vectors
22.06.2011 Lecture IHCI SS 2011 13
Initial position
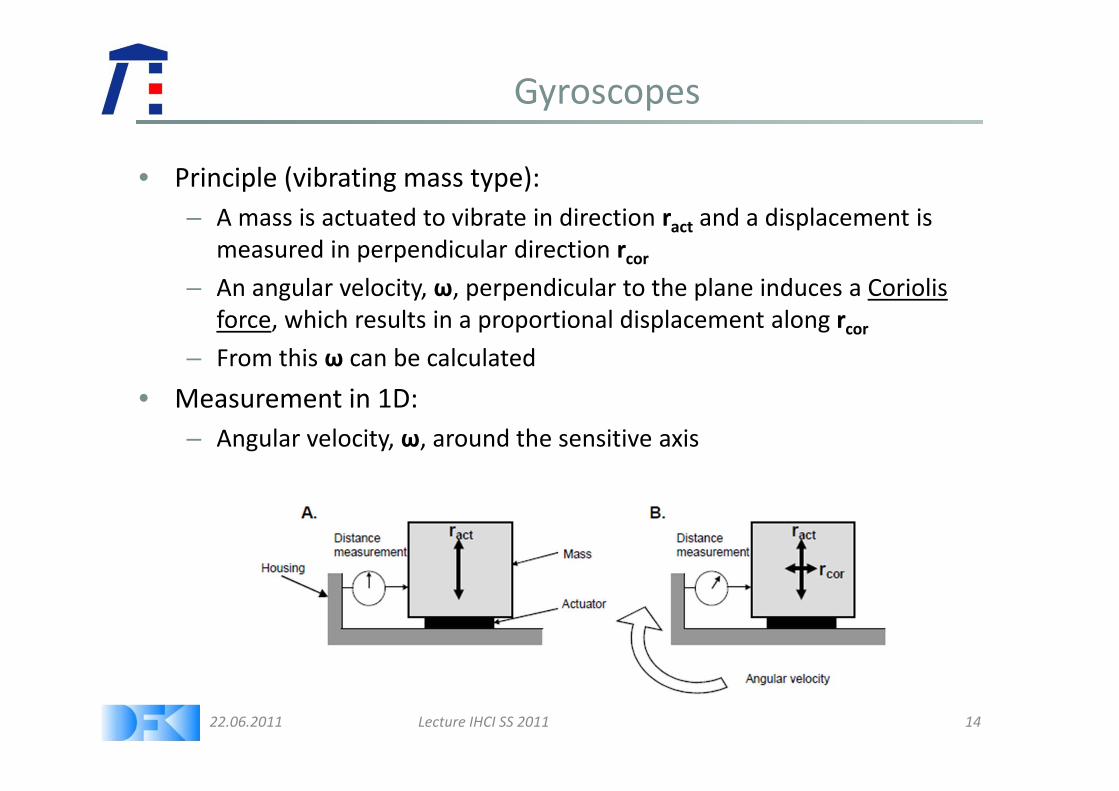
Gyroscopes
• Principle (vibrating mass type):– A mass is actuated to vibrate in direction ract and a displacement is
measured in perpendicular direction rcor– An angular velocity, ω, perpendicular to the plane induces a Coriolis
force, which results in a proportional displacement along rcor– From this ω can be calculated
• Measurement in 1D: – Angular velocity, ω, around the sensitive axis
22.06.2011 Lecture IHCI SS 2011 14

Reminder: circular motion
Coriolis acceleration:A person moving northward towards the outer edge of a rotating platform must increase the westward speed component (blue arrows) to maintain a northbound course. The acceleration required is the Coriolis acceleration.
22.06.2011 Lecture IHCI SS 2011 15

Reminder: rotational motion (1D)
• Angular velocity:
• Rotation:
• In 3D, a bit more involved (later)
22.06.2011 Lecture IHCI SS 2011 16
Initial orientation
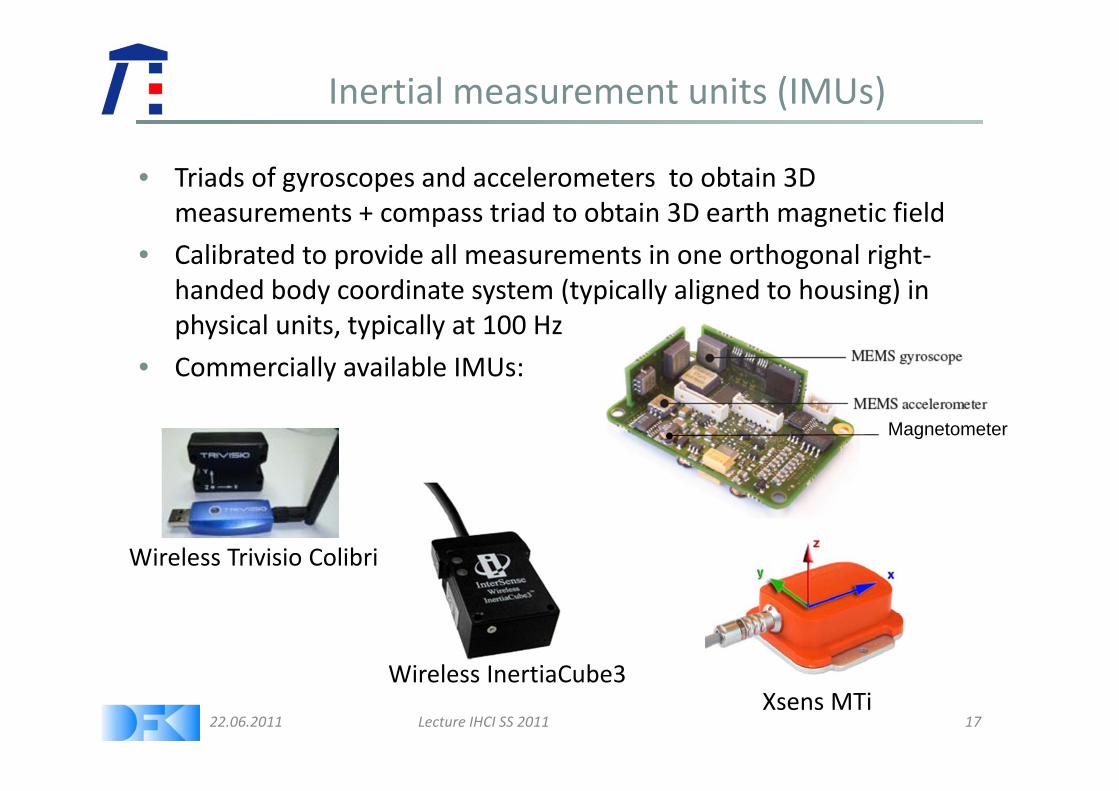
Inertial measurement units (IMUs)
• Triads of gyroscopes and accelerometers to obtain 3D measurements + compass triad to obtain 3D earth magnetic field
• Calibrated to provide all measurements in one orthogonal right‐handed body coordinate system (typically aligned to housing) in physical units, typically at 100 Hz
• Commercially available IMUs:
22.06.2011 Lecture IHCI SS 2011 17
Magnetometer
Xsens MTiWireless InertiaCube3
Wireless Trivisio Colibri
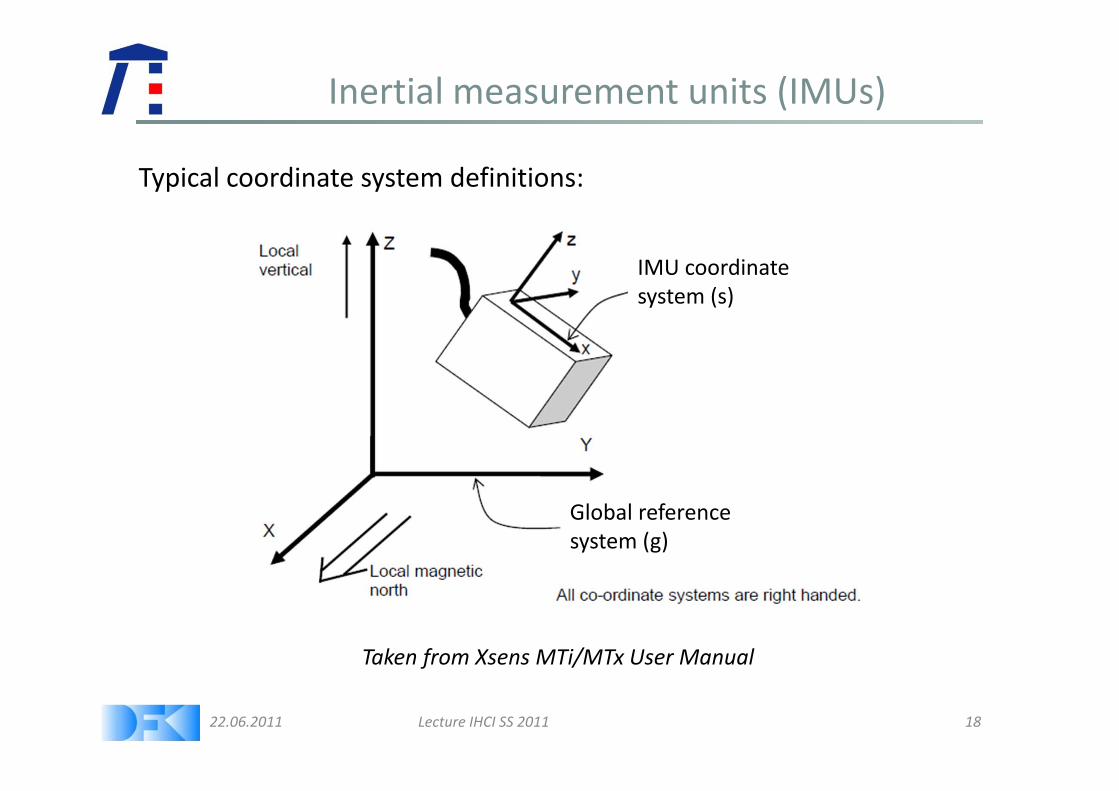
Inertial measurement units (IMUs)
Typical coordinate system definitions:
22.06.2011 Lecture IHCI SS 2011 18
Taken from Xsens MTi/MTx User Manual
IMU coordinate system (s)
Global reference system (g)

Inertial measurement units (IMUs)
• Measurement models in 3D (idealized!):– 3D gyroscope [rad/s]:
– 3D accelerometer [m/s2]:
– 3D compass [tesla or gauss]: under no magnetic disturbances, measures magnetic north
22.06.2011 Lecture IHCI SS 2011 19
IMU orientation with respect to global frame
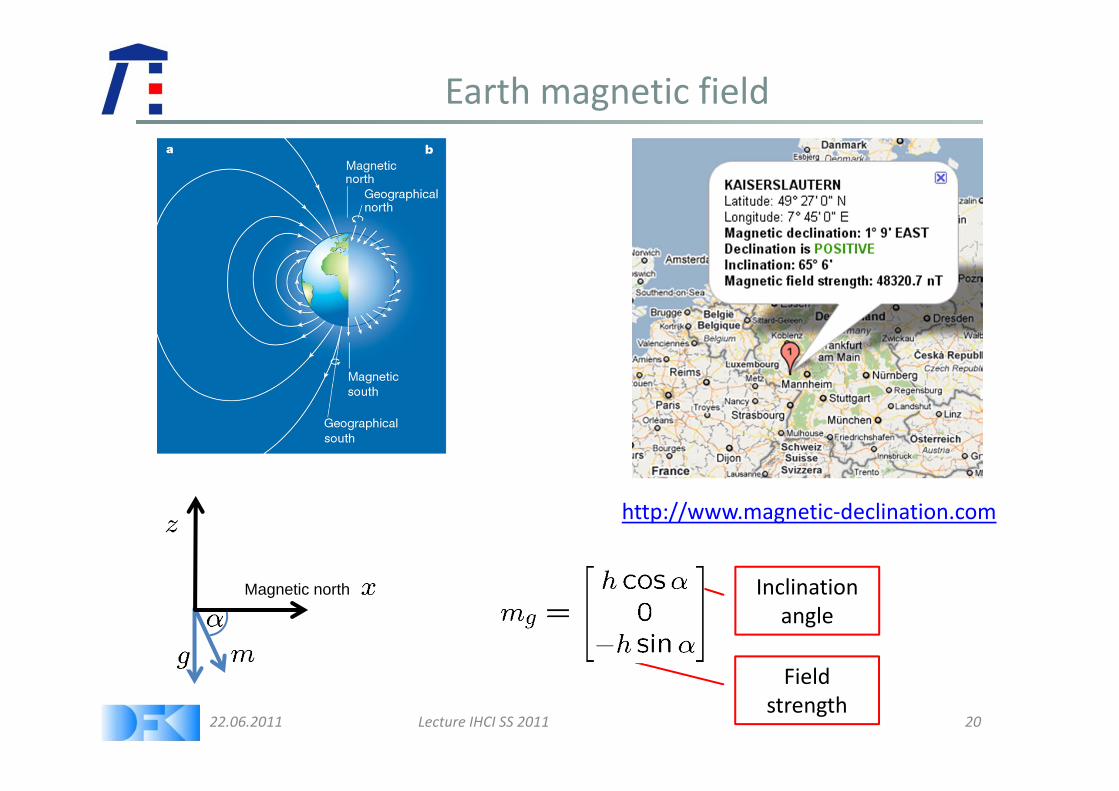
Earth magnetic field
22.06.2011 Lecture IHCI SS 2011 20
http://www.magnetic‐declination.com
Magnetic north
Field strength
Inclination angle

Accelerometers: acceleration/gravity ambiguity
22.06.2011 Lecture IHCI SS 2011 21
zy z
y
Once we know the IMU’s rotation, we can separate body acceleration and acceleration due to gravity.
Ambiguity!
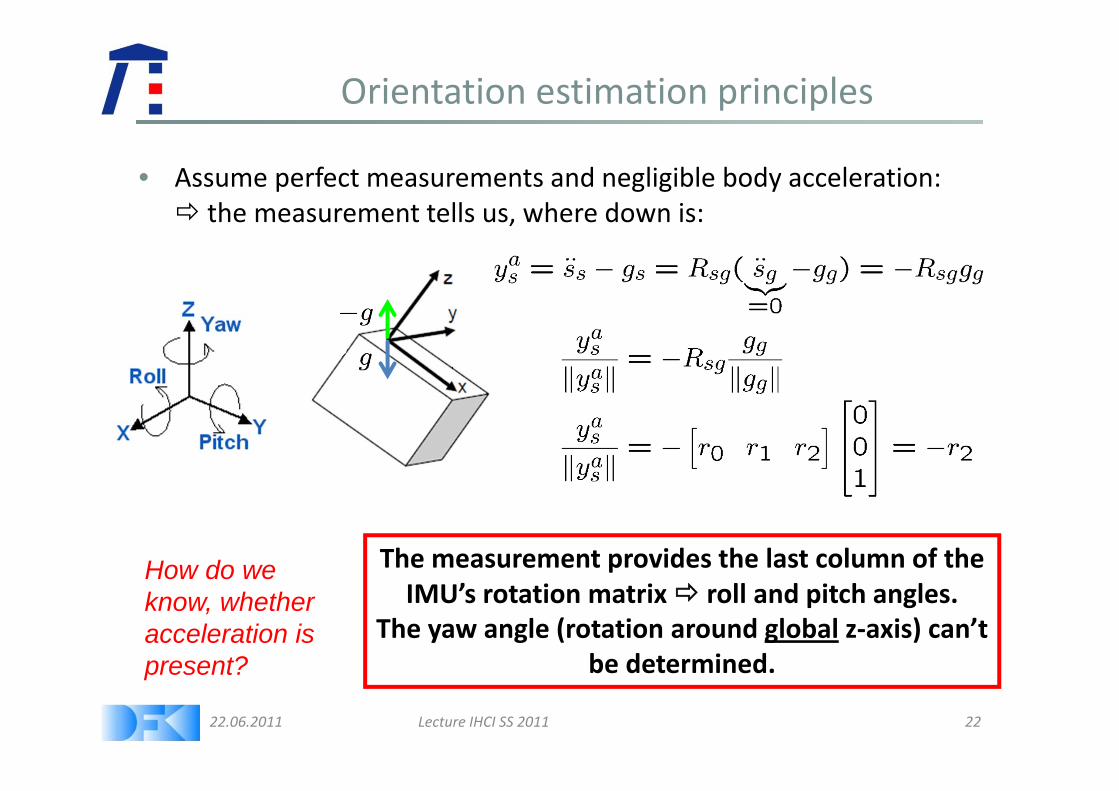
Orientation estimation principles
• Assume perfect measurements and negligible body acceleration: the measurement tells us, where down is:
22.06.2011 Lecture IHCI SS 2011 22
The measurement provides the last column of the IMU’s rotation matrix roll and pitch angles.
The yaw angle (rotation around global z‐axis) can’t be determined.
How do we know, whether acceleration is present?

Orientation estimation principles
Naive solution under negligible body acceleration:• Accelerometer provides negative z‐axis of global frame in IMU
frame yields last column of required IMU rotation matrix
• How can we use the magnetometer information?
22.06.2011 Lecture IHCI SS 2011 23
Magnetic north
Yields y‐axis of global frame in IMU frame

Orientation estimation principles
• What about the gyroscopes?• Naive solution using gyroscopes: integrate angular velocity
measurements to obtain absolute rotation• Easy in 1D: integration based on rectangular rule yields:
• In 3D: – Angular velocity vector describing turning rate around instantaneous
rotation axis
22.06.2011 Lecture IHCI SS 2011 24
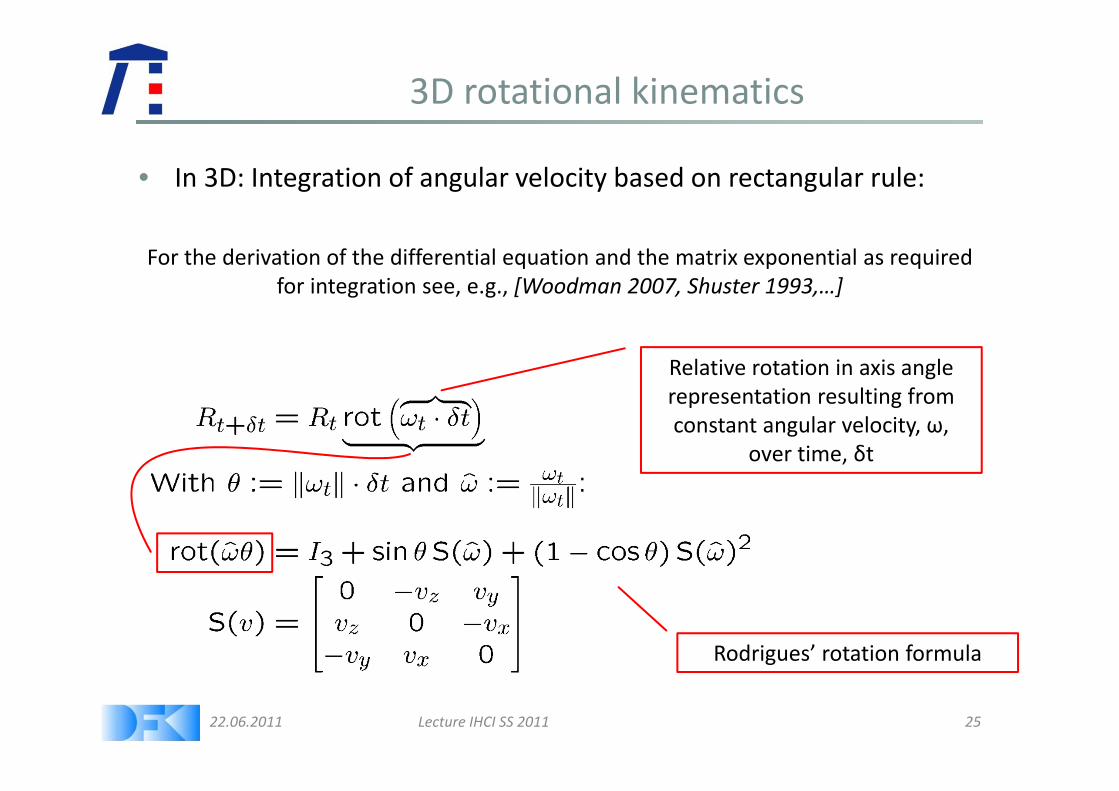
3D rotational kinematics
• In 3D: Integration of angular velocity based on rectangular rule:
For the derivation of the differential equation and the matrix exponential as required for integration see, e.g., [Woodman 2007, Shuster 1993,…]
22.06.2011 Lecture IHCI SS 2011 25
Rodrigues’ rotation formula
Relative rotation in axis angle representation resulting from constant angular velocity, ω,
over time, δt

Orientation estimation principles
• Bad news: IMU measurements are not perfect!• More realistic models including bias and noise terms:
• What does this mean for naive solution based on accelerometers and magnetometers?
Jitter and systematic error• What does this mean for naive solution based on gyroscopes?
Error accumulates over time (drift)
22.06.2011 Lecture IHCI SS 2011 26
Zero mean white noise (typically modelled as Gaussian)
Even worse are magnetic disturbances!

Orientation estimation principles
• Solution? Sensor fusion!– Gyroscopes provide short‐term indication of rotation (depends on,
e.g., bias stability and noise scale, independent of acceleration)– Accelerometers provide drift correction for roll and pitch angle during
periods of negligible body acceleration– Magnetometers provide drift correction for heading direction during
periods of no magnetic disturbance• Typically, a statistical filter (e.g. extended Kalman filter) is used for
fusion [Rehbinder and Hu 2001, Harada et al 2007, …]• Bias terms can also be estimated
• Applications, e.g.:– Head tracking for VR (HMD)– 3D pointing devices
22.06.2011 Lecture IHCI SS 2011 27
Reminder: improved motion sensing of Wii
MotionPlus and PlayStation Move

Orientation and position estimation principles
Dead‐reckoning:
• What problems do you expect here?• Additional references required,
e.g. visual information• Applications, e.g.:
– 6 DOF camera tracking for AR– Inertial navigation systems (aircrafts, submarines, spacecraftsmuch
better sensors!!!)
22.06.2011 Lecture IHCI SS 2011 28
Reminder: PlayStation Move
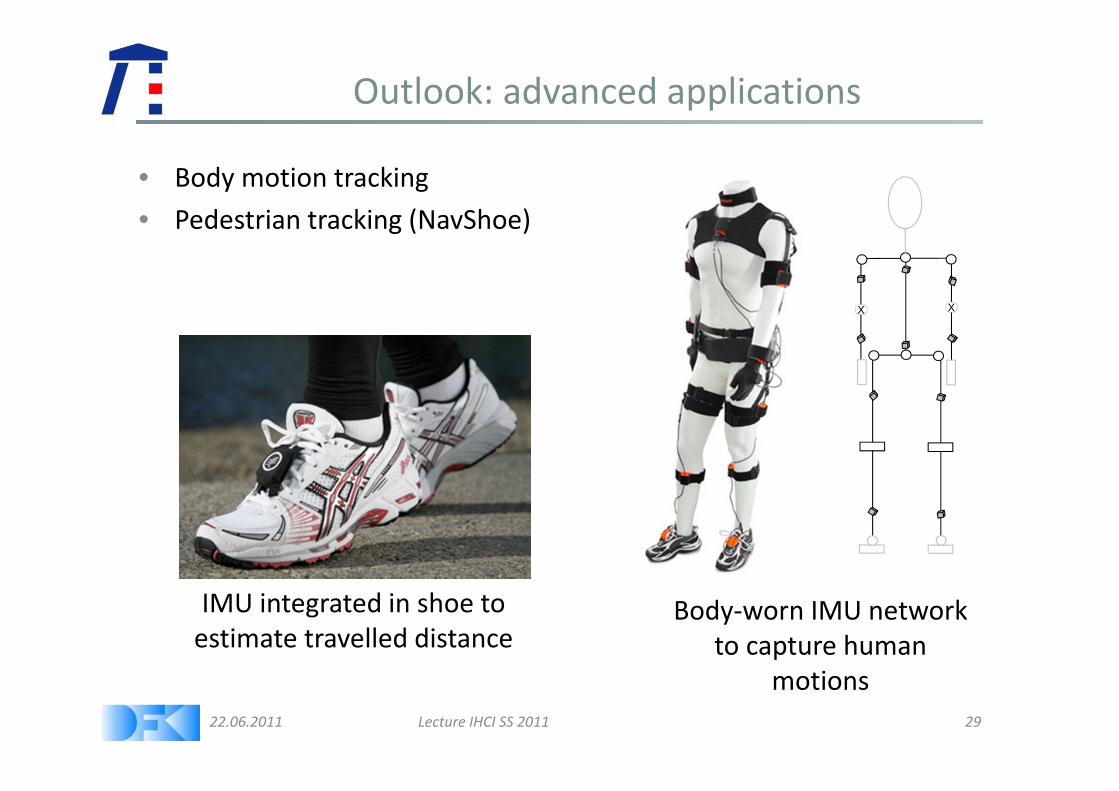
Outlook: advanced applications
• Body motion tracking• Pedestrian tracking (NavShoe)
22.06.2011 Lecture IHCI SS 2011 29
X X
IMU integrated in shoe to estimate travelled distance
Body‐worn IMU network to capture human
motions

References
• Inertial sensors:– O. J. Woodman: An introduction to inertial navigation. Technical Report
UCAM‐CLTR‐696, University of Cambridge, Computer Laboratory, Aug. 2007
– D. Titterton and J. Weston: Strapdown Inertial Navigation Technology, American Institute of Aeronautics and Astronautics, 2004
• Orientation estimation:– T. Harada, T. Mori and T. Sato: Development of a Tiny Orientation
Estimation Device to Operate under Motion and Magnetic Disturbance, The International Journal of Robotics Research, 2007, 26, 547‐559
– H. Rehbinder and X. Hu: Drift‐free attitude estimation for accelerated rigid bodies, IEEE International Conference on Robotics and Automation (ICRA), 2001
• Rotation representations and rotational kinematics– Shuster, M. D.: A Survey of Attitude Representations, The Journal of the
Astronautical Sciences, 1993, 41, 439–517
22.06.2011 Lecture IHCI SS 2011 30

We are searching for students in this area!
Contact:Gabriele Bleser (Dr.‐Ing.), Senior Researcher
German Research Center for Artificial Intelligence (DFKI)Department Augmented Vision
Trippstadter Straße 122, 67663 Kaiserslautern E‐Mail: [email protected]
22.06.2011 Lecture IHCI SS 2011 31





























