Embed Size (px)
Citation preview

October 2007 1
Efficient Policy Analysis for Administrative Role-Based Access Control
Scott D. Stoller Ping Yang
C.R. Ramakrishnan Mikhail I. Gofman

October 2007 2
Motivation for Security Policy Analysis
Problem: Security policies are often enforced byHumans (slow, subject to social engineering, etc.)Application code in Java, C++, etc. (hard to understand, analyze, and maintain)
Goal: Express security policies in policy languages.Easier to read, analyze (validate), and maintainEnforced efficiently and automatically (except for occasional manual override)
Examples: Medical records, financial info, course gradesResearch: policy languages, policy analysis algorithms, policy IDEs, distributed enforcement, …

October 2007 3
Administrative Policy Analysis
Large organizations have large and complex policies.
A single administrator can’t manage the entire policy.
A trusted senior administrator delegates partial control over the policy to other administrators by establishing an administrative policy.
Example: president, department chair, dean, faculty, …
Administrative policy: controls changes to the policy.
Analysis goal: Understand the power of groups of administrators. Changes by different admins may interact.
Example: Reachability: Can administrators X and Y together modify the policy so user U has permission P?

October 2007 4
Overview
We study analysis for ARBAC97, an administrative policy framework for Role-Based Access Control (RBAC).Reachability analysis for ARBAC is intractable in general.Efficient algorithms were known only for significantly restricted cases.We present more practical analysis algorithms that:
Exploit typical characteristics of realistic policiesAre fixed-parameter tractable (FPT), i.e., have
high complexity W.R.T. a (small) parameter klow complexity W.R.T. overall problem size, when value of k is fixed.

October 2007 5
Outline
Background
Case Studies
Algorithms (Forward and Backward),
and Fixed-Parameter Tractability Results
Experimental Results

October 2007 6
Role-Based Access Control (RBAC)
Users are assigned to roles, e.g., doctor, nurse, patient.
Permissions are associated with roles.
A user has a permission if he is a member of some role with that permission.
RBAC is relatively simple and widely used.
User Role PermissionUA PA
User Assignment
PermissionAssignment

October 2007 7
Role Hierarchy
r1 ≥ r2 (r1 is senior to r2) means every member of r1 is also an implicit member of r2. Thus, members of r1 have all the permissions that members of r2 have.
Permission flows up. Membership flows down.
Role hierarchy reduces redundancy, eases administration.
New supervisor is added to one role, instead of four.
Project Supervisor
Project Member
Tester Programmer

October 2007 8
Administrative RBAC (ARBAC)
ARBAC is a generic name for administrative policy models for RBAC.Our model is based on ARBAC97 [Sandhu+ 1997].
Our ideas are also relevant to other models, such as ARBAC02 [Oh+ 2002], RHA [Crampton+ 2005],
UARBAC [Li+ 2007], A-ERBAC [Kern+ 2003].ARBAC97 has three components:
User-Role Administration: controls user assignmentPermission-Role Administration: controls permission assignmentRole-Role Administration: controls role hierarchy

October 2007 9
ARBAC97
can_assign(ar, c, r): an administrator in role ar can assign a user satisfying precondition c to role r.
Precondition: true or c1…cn, where ci is a role r or a negated role r.
Ex.: can_assign(Provost, Professor DeptChair, Dean).
can_revoke(ar, r): an administrator in role ar can remove any user from role r.
Don’t bother allowing pre-conditions for revocation.
Separate Administration Restriction: Administrative roles and regular roles are disjoint. Assume it now, relax later.

October 2007 10
Analysis Problems for ARBAC97
User-Role Reachability: Can administrators u1,…,un, using operations allowed by ARBAC policy ψ, transform initial RBAC policy γ0 to an RBAC policy in which the target user ut is a member of all roles in goal={r1,…, rn}?
Weakest Preconditions: Similar, except the target user’s initial roles are unspecified, and the analysis finds the minimal sets of initial roles for him such that the administrators can achieve the goal.
Containment [Li+ 2006]: Similar to reachability, except the administrators’ goal is to produce an RBAC policy in which members(r1) members(r2).

October 2007 11
Outline
Background
Case Studies
Algorithms (Forward and Backward),
and Fixed-Parameter Tractability Results
Experimental Results

October 2007 12
Observations from Case Studies
ARBAC policies for a university and a health-care facility.University roles: admissions officer, professor, department chair, dean, provost, president, …Health-care facility roles: manager, doctor, patient, …
Observations:Every can_assign rule has 0 or 1 positive preconditions.Most roles are non-negative. |goal| ≤ 2.An admin can assign and revoke nearly the same roles.Separate administration is not satisfied, but a related condition (defined later) is satisfied for most queries.
A role is negative if it appears negated in a precondition.

October 2007 13
Outline
Background
Case Studies
Algorithms (Forward and Backward),
and Fixed-Parameter Tractability Results
Experimental Results
October 2007 14
Forward Algorithm for Reachability
Forward algorithm: Standard reachability computation optimized with a reduction, similar to [Lipton 1975].With the separate administration assumption, it suffices to consider the role assignment of the target user u only.A state is the set of roles that the target user u is in.Transitions that add non-negative roles are invisible and get combined with a preceding visible transition to form a composite transition.
This is safe because invisible transitions never disable other transitions.
Theorem: Reachability is fixed-parameter tractable with respect to the number of negative roles, denoted |NR|.
October 2007 15
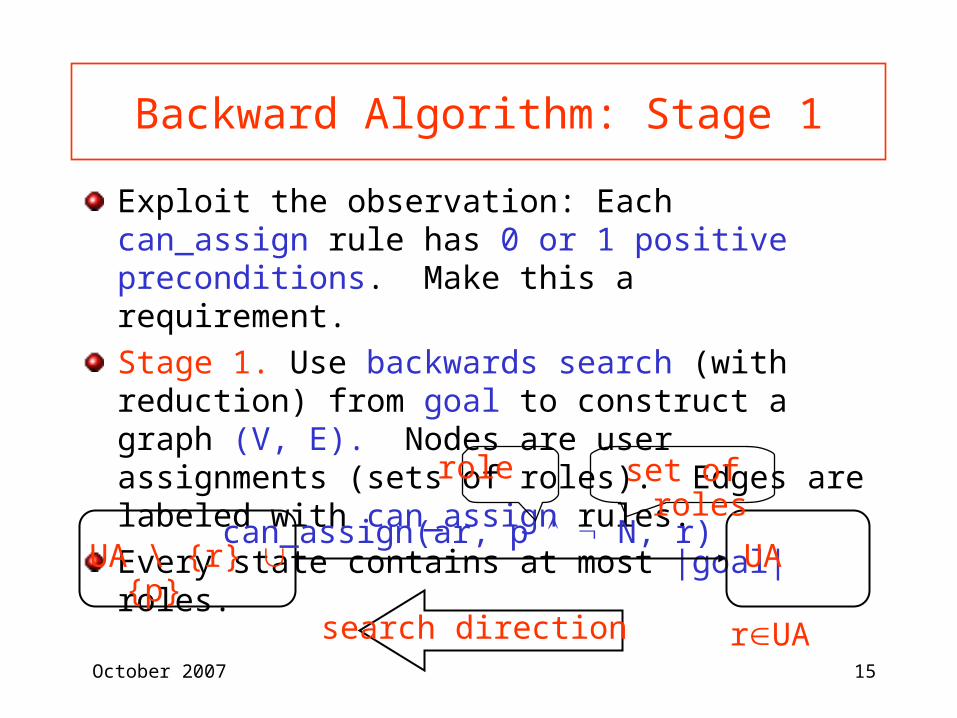
Backward Algorithm: Stage 1
Exploit the observation: Each can_assign rule has 0 or 1 positive preconditions. Make this a requirement.
Stage 1. Use backwards search (with reduction) from goal to construct a graph (V, E). Nodes are user assignments (sets of roles). Edges are labeled with can_assign rules.
Every state contains at most |goal| roles.
UAUA \ {r} {p}can_assign(ar, p N, r)
search direction
role set of roles
rUA

October 2007 16
Backward Algorithm: Stage 2
The goal is not reachable, because r1 is irrevocable and disables the last transition.
To detect such situations, Stage 2 performs a forward analysis, labeling each node R with sets I1,I2,… of irrevocable roles. represents states RI1, RI2,…
cana(ar, true, r1)
r2 r3cana(ar, r2 r1, r3)
r1cana(ar, r1, r2)
Ø
Example: initial state = {}, goal = {r3}, can_assign rules are as shown, and can_revoke(ar, r2). Result of Stage 1:
{Ø} {{r1}} {}{Ø}
R
{I1,I2,…}

October 2007 17
Backward Alg.: Fixed-Parameter Tractability
irrev (“irrevocable roles”): set of roles that administrators in the query can assign users to and cannot revoke users from.In our case studies, |goal| <= 2 and |irrev| ≤ 2.Theorem: For policies with 0 or 1 positive preconditions per rule, reachability is fixed-parameter tractable with respect to {|goal|, |irrev|}.Proof sketch: Stage 1: Every state contains at most |goal| roles, so |V| is O(|R|2|goal|), where R is the set of roles. Stage 2: The complexity is O(|V| 22|irrev|
).This is a weaker notion of fixed-parameter tractability, because the complexity is |R|2|goal| instead of |R|c.

October 2007 18
Beyond Separate Administration
A role can have regular and administrative permissions.Administrators may assign themselves to new roles.
Example: DeptChair assigns himself to HonorsPgmDir and then assigns students to HonorsStudent.
Need to track roles of multiple users. Reachability is fixed param. tractable with respect to # neg roles and # admins.A query satisfies hierarchical role assignment if can_assign(ari, c, r) implies ari ≥ r for each ari. Each administrator is already an implicit member of roles to which he can be assigned, so such assignments can be ignored. Algorithms that assume separate administration apply. In our case studies, most queries satisfy this.

October 2007 19
Outline
Background
Case Studies
Algorithms (Forward and Backward),
and Fixed-Parameter Tractability Results
Experimental Results

October 2007 20
Experiments: Case Studies
Evaluate algorithms on case studies and random policies.
Slicing eliminates parts of the policy irrelevant to the given reachability query. Typical static slicing, enhanced to consider positive/negative. Use with forward algorithm.
University policy case study:
11 administrative roles, 21 other roles
28 can_assign rules (106 after eliminate role hierarchy)
Health care case study: 11 roles, 13 can_assign rules, …
Results:
Forward alg: at most 0.01 sec per query.
Backward alg: at most 0.2 sec per query.

October 2007 21
Experiments: Random Policies
Randomly generate policies: vary the size parameters, while maintaining similar characteristics as case studies (distribution of can_assign rules per role, positive and negative preconditions per rule, …)
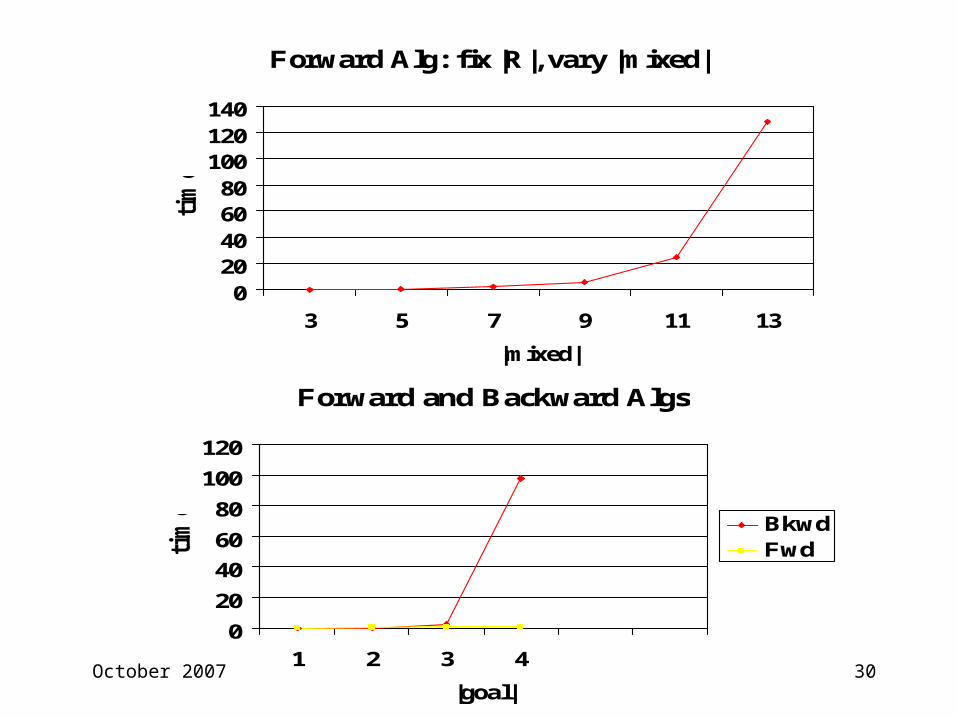
Measurements confirm polynomial behavior predicted by fixed-parameter tractability results – see next slide.
Forward algorithm with slicing is faster when goal is large, e.g., with |goal|=4, forward alg is 91× faster than backward
Backward algorithm is faster when goal is small and NR is large, e.g., with |goal|=1, |IR|=2, and 0.6 < |NR/R| < 0.9, backward alg is 11× to 30× faster than forward alg.

October 2007 22
Forward Algorithm: Fix |mixed|, Vary |R|
0
5
10
15
20
100 200 300 400 500
|R|
tim
e
Backward Alg: Fix |Irrev/R|, Vary |R|
0
0.05
0.1
0.15
0.2
0.25
0.3
100 200 300 400 500
|R|
tim
e

October 2007 23
Related Work
[Harrison+ 1976] shows that safety analysis is undecidable for an access matrix model that allows creation of subjects and objects.
URA97 (User-Role Assignment) does not include creation of users or roles.
[Sistla+ 2006] gives algorithms and complexity results for checking temporal properties of role-based trust management policies controlled by role restrictions.
Role restrictions are a simpler form of administrative policy.Temporal properties are more complex than reachability.

October 2007 24
Related Work
[Li+ 2004] gives polynomial analysis algorithms for two restricted versions of ARBAC97 without negative preconditions. We allow negative preconditions.[Sasturkar+ 2006] and [Jha+ 2007] both
Prove reachability analysis for URA97 is PSPACE-complete.Identify some restrictions that make the problem NP-complete or polynomial-time.Contain no fixed-parameter tractability results, and no algorithms with same fixed-parameter tractability properties as our algorithms.Assume separate administration.

October 2007 25
Contributions and Future Work
With separate administration:Reachability is fixed-parameter tractable (FPT) with respect to |negativeRoles|.For policies with 0 or 1 positive precondition per rule, reachability is FPT w.r.t. {|goal|, |irrevocableRoles|}.
Without separate administration:Above results hold with hierarchical role assignment.Reachability is fixed-parameter tractable with respect to {|negativeRoles|, |administrators|}.
Future Work:Role hierarchy changes. Roles with params. Info flow.

October 2007 26
Thank You!
October 2007 27
Fixed-Parameter Tractability of Reachability
Theorem: Reachability is fixed-parameter tractable W.R.T. the number of negative roles, denoted |NR|.Proof sketch: We show the forward algorithm runs in time O( f(|NR|) |I|c ) for some f and c. |I| is overall input size.G: reduced state graph constructed by the algorithmGN: projection of G onto NR, the set of negative roles.
Map each state {r1,…, rn} to {r1,…, rn}∩ NR.Each state in G is reachable by a simple path in G, which corresponds to a path in GN that goes around each cycle at most once (going around again would not add any more roles, because non-negative roles are added eagerly). There are at most O(f(|NR|)) such paths, for some f.

October 2007 28
Example: Forward Algorithm and FPT Proof
can_assign = {(true, r1), (r1, r2), (¬r1r2, r3)}.
Initial state γ0 ={}.
goal = {r3}.
Reduced state graph G: {} → {r1, r2} → {r2, r3}
Projection GN of G onto NR={r1}: {} → {r1}
For each state γ in G, there is a path to γ that, when projected onto GN, goes around each cycle at most once.
This implies |G| is O(g(|GN|)) hence is O(f(|NR|)).
←

October 2007 29
Backward Alg.: Fixed-Parameter Tractability
Theorem: For policies with 0 or 1 positive preconditions per rule, reachability is fixed-parameter tractable with respect to {|goal|, |irrev|}.
Proof sketch:
Stage 1: The restriction on positive preconditions implies that every state contains at most |goal| roles, so |V| is O(|R|2|goal|), where R is the set of roles.
Stage 2: The complexity is O(|V| 22|irrev|).
October 2007 30
Forward Alg: fix |R|, vary |mixed|
020406080
100120140
3 5 7 9 11 13
|mixed|
tim
e
Forward and Backward Algs
0
20
40
60
80
100
120
1 2 3 4
|goal|
tim
e
BkwdFwd





























