Embed Size (px)
Citation preview

Notes de cours Seismes et Ouvrages
D. Clouteau
7 mars 2008

Table des matieres
1 Introduction to sismology 51.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2 Quantifying seismic events . . . . . . . . . . . . . . . . . . . . 6
1.2.1 Mercalli’s Intensity, Richter Magnitude and others . . 61.2.2 seismic Moment . . . . . . . . . . . . . . . . . . . . . 8
1.3 Models of seismic sources . . . . . . . . . . . . . . . . . . . . 81.3.1 failure mechanism in the fault . . . . . . . . . . . . . . 81.3.2 Kinematical source model . . . . . . . . . . . . . . . . 91.3.3 Finite size effects and corner frequency . . . . . . . . . 11
1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 The seismic motion for the engineers 132.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.2 Seismic Regulation . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Peak Ground Acceleration . . . . . . . . . . . . . . . . 132.3 Normalized Response Spectra . . . . . . . . . . . . . . . . . . 132.4 Models for the local wave field . . . . . . . . . . . . . . . . . 16
3 Interaction sol-structure lineaire 183.1 Geometrie et notations . . . . . . . . . . . . . . . . . . . . . . 183.2 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.3 Elastodynamique dans le domaine des frequences . . . . . . . 203.4 Fondation rigide . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4.1 Champ diffracte local et champs rayonnes . . . . . . . 223.5 Impedance de fondation . . . . . . . . . . . . . . . . . . . . . 233.6 Interaction cinematique . . . . . . . . . . . . . . . . . . . . . 283.7 Interaction inertielle . . . . . . . . . . . . . . . . . . . . . . . 293.8 Interaction entre batiments . . . . . . . . . . . . . . . . . . . 293.9 Fondation souple . . . . . . . . . . . . . . . . . . . . . . . . . 303.10 Variabilite du champ incident . . . . . . . . . . . . . . . . . . 30
1

2
4 Equations integrales et elements de frontiere 314.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 Rappels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.1 Notations . . . . . . . . . . . . . . . . . . . . . . . . . 324.2.2 Formule de Green-Maxwell . . . . . . . . . . . . . . . 324.2.3 Fonction de Green . . . . . . . . . . . . . . . . . . . . 33
4.3 Equations integrales . . . . . . . . . . . . . . . . . . . . . . . 354.3.1 Theoreme de representation . . . . . . . . . . . . . . . 364.3.2 Equations integrales . . . . . . . . . . . . . . . . . . . 374.3.3 Equations integrales en domaines non bornes . . . . . 384.3.4 Application a des problemes aux limites . . . . . . . . 40
4.4 Methode des elements finis de frontiere . . . . . . . . . . . . . 424.4.1 Discretisation . . . . . . . . . . . . . . . . . . . . . . . 434.4.2 Assemblage . . . . . . . . . . . . . . . . . . . . . . . . 444.4.3 Resolution . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.5 Equations integrales regularisees . . . . . . . . . . . . . . . . 454.5.1 Domaines bornes . . . . . . . . . . . . . . . . . . . . . 464.5.2 Domaines non bornes . . . . . . . . . . . . . . . . . . 48
4.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
A 7eme Colloque National AFPS 2007 - Ecole Centrale Paris 50A.1 Notations et hypotheses . . . . . . . . . . . . . . . . . . . . . 50
A.1.1 Donnees caracterisant le materiau . . . . . . . . . . . 50A.1.2 Donnees caracterisant le seisme . . . . . . . . . . . . . 51A.1.3 Hypotheses . . . . . . . . . . . . . . . . . . . . . . . . 51
A.2 Rayon equivalent de la source sismique . . . . . . . . . . . . . 51A.3 Calcul de l’energie sismique par le bilan d’energie . . . . . . . 52A.4 Calcul directe de l’energie sismique . . . . . . . . . . . . . . . 53A.5 Comparaison avec les lois empiriques de Gutenberg-Richter
sur l’energie et de Wells-Coppersmith sur la geometrie desfailles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
B Ondes elastiques dans un espace homogene 58B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58B.2 Equations generales . . . . . . . . . . . . . . . . . . . . . . . 58B.3 Ondes de compression et de cisaillement . . . . . . . . . . . . 60
B.3.1 Decomposition de Helmholtz . . . . . . . . . . . . . . 60B.3.2 Les ondes planes . . . . . . . . . . . . . . . . . . . . . 61B.3.3 Ondes planes elastiques . . . . . . . . . . . . . . . . . 61B.3.4 Impedance d’une onde plane et conditions de radiation
de Sommerfeld . . . . . . . . . . . . . . . . . . . . . . 63B.4 Champ cree par des forces de volume . . . . . . . . . . . . . . 64
B.4.1 Calcul de la fonction de green de l’espace homogene . 64B.4.2 Fonction de Green stationnaire . . . . . . . . . . . . . 66

3
B.4.3 Fonction de Green transitoire . . . . . . . . . . . . . . 68B.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71B.6 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
C Reflexion et transmission d’ondes planes sur des interfaces 73C.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73C.2 Le probleme de reflexion . . . . . . . . . . . . . . . . . . . . . 74
C.2.1 Trace d’une onde plane sur un plan . . . . . . . . . . . 75C.2.2 Vecteur contrainte associe a une onde plane . . . . . . 76C.2.3 Phase apparente d’une onde plane sur le plan . . . . . 77C.2.4 Flux d’energie associe a une onde plane . . . . . . . . 78
C.3 Reflexion sur une surface libre et ondes de surface . . . . . . 78C.3.1 Les lois de la reflexion . . . . . . . . . . . . . . . . . . 80C.3.2 Angle critique et ondes de surface . . . . . . . . . . . 81C.3.3 Coefficients de reflexion . . . . . . . . . . . . . . . . . 83C.3.4 Amplifications . . . . . . . . . . . . . . . . . . . . . . 86C.3.5 Onde de Rayleigh . . . . . . . . . . . . . . . . . . . . 88
C.4 Reflexion sur une interface et transmission . . . . . . . . . . . 90C.4.1 Loi de Descartes et ondes refractees . . . . . . . . . . 90C.4.2 Coefficients de reflexion . . . . . . . . . . . . . . . . . 91C.4.3 Amplification et concentration de contraintes . . . . . 92C.4.4 Ondes de Stoneley . . . . . . . . . . . . . . . . . . . . 92
C.5 Couche sur un demi-espace, ondes de Love . . . . . . . . . . . 93C.5.1 Resonances . . . . . . . . . . . . . . . . . . . . . . . . 94C.5.2 Ondes de Love . . . . . . . . . . . . . . . . . . . . . . 95
C.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97C.7 Exercices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
D Modeling SSI with a two DOF system 99D.1 SSI with a 2DOF model . . . . . . . . . . . . . . . . . . . . . 99
D.1.1 Dynamical system . . . . . . . . . . . . . . . . . . . . 99D.1.2 Modal analysis . . . . . . . . . . . . . . . . . . . . . . 100
E Rappels de dynamique des structures 103E.1 Reponse quasi-statique . . . . . . . . . . . . . . . . . . . . . . 104
E.1.1 Estimation d’erreur . . . . . . . . . . . . . . . . . . . 105E.2 Methode de Rayleigh . . . . . . . . . . . . . . . . . . . . . . . 106
E.2.1 Estimation d’erreur . . . . . . . . . . . . . . . . . . . 108E.3 Decomposition spectrale . . . . . . . . . . . . . . . . . . . . . 108
E.3.1 Troncature . . . . . . . . . . . . . . . . . . . . . . . . 109E.3.2 Estimation d’erreur . . . . . . . . . . . . . . . . . . . 110E.3.3 Extension de la base modale . . . . . . . . . . . . . . 111
E.4 Structure multi-supportee . . . . . . . . . . . . . . . . . . . . 112E.4.1 Solution pseudo-statique . . . . . . . . . . . . . . . . . 114

4
E.4.2 Decomposition modale . . . . . . . . . . . . . . . . . . 115E.5 Resolution en frequences . . . . . . . . . . . . . . . . . . . . . 116E.6 Sollicitations aleatoires . . . . . . . . . . . . . . . . . . . . . . 119
E.6.1 Alea temporel . . . . . . . . . . . . . . . . . . . . . . . 119E.6.2 Alea spatial . . . . . . . . . . . . . . . . . . . . . . . . 122
E.7 Dimensionnement . . . . . . . . . . . . . . . . . . . . . . . . . 123E.7.1 Cas pseudo-statique . . . . . . . . . . . . . . . . . . . 123E.7.2 Cas Dynamique . . . . . . . . . . . . . . . . . . . . . . 124E.7.3 Recomposition modale . . . . . . . . . . . . . . . . . . 124
E.8 conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
F Outils Mathematique 126F.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126F.2 Cadre mathematique . . . . . . . . . . . . . . . . . . . . . . . 126
F.2.1 Analyse temporelle . . . . . . . . . . . . . . . . . . . . 126F.2.2 Analyse en frequence . . . . . . . . . . . . . . . . . . . 127F.2.3 Analyses spectrales . . . . . . . . . . . . . . . . . . . . 129F.2.4 Autres approches . . . . . . . . . . . . . . . . . . . . . 130
G Outils mathematique en vibration des structures 131G.1 Principe des puissances virtuelles . . . . . . . . . . . . . . . . 131G.2 Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . 132G.3 Estimation d’erreur . . . . . . . . . . . . . . . . . . . . . . . . 132G.4 Quotient de Rayleigh . . . . . . . . . . . . . . . . . . . . . . . 133
H Transformations de Fourier 135

Chapitre 1
Introduction to sismology
1.1 Introduction
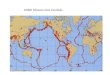
It is now well known that earthquakes occur along seismic faults in thecrust. These faults are located either along the major tectonic plate bounda-ries (Japan, California, Turkey) or inside these plates (Alpes..). Earthquakeare due to a dynamic release of deformations in the crust. These deforma-tions are accumulated during the very slow relative motions of the plates ata speed of a few centimeters per year. Depending on the tectonic context thedepth of the fault ranges from 10 to 200 km ( See http ://www.mssmat.ecp.fr/-Sources-et-propagation-des-seismes,196-).
Fig. 1.1 – Earthquake location on the earth
In this chapter we are only interested in quantifying seismic events inorder to define the seismic loads to apply to structures. After a brief his-
5

6
Fig. 1.2 – Left : San Andrea fault, right : faults reaching the free surface.
torical summary on classical seismic scales, we will concentrate on modelsof seismic sources and on quantifying the leading parameters of the seismicloads (active fault size, mean slippage, corner frequency...).
1.2 Quantifying seismic events
1.2.1 Mercalli’s Intensity, Richter Magnitude and others
The Mercalli scale proposed in 1902 and modified ever since ranges fromI to XII. It measures the amont of destruction due to an earthquake (seefigure 1.3). This measure depends on the type of structure and the distancefrom the earthquake epicentre. It is thus partly improper to be used in thedesign of new structures or to quantify the power of an earthquake.
From this sismological point of view, The Richter Magnitude scale hasbeen proposed in 1935 based on experimental observations of the seismicmotion in California. Basically this magnitude ML is the Logarithm of theobserved maximum wave amplitude u measured by a given seismograph ata given distance D from the epicenter by :
ML = log10(max u(mm)) + 2.76 log10(D(km))− 2.48
This measure depends on the instrument and on the type of earthquakeconsidered (typically small to moderate Califonian earthquakes). As it will

7
Fig. 1.3 – Mercalli’s Intensity scale (from wikipedia)
be analysed in the next section the seismic Moment Mo or the releasedenergy E given by 1 :
log10(Mo(Nm)) = 1.5ML + 9.3 = log10(E (J)) + 4.2
are often preferred since they directly relate to physical properties of theseismic fault.
A magnitude 8 earthquake corresponds to an energy of 1018Joules whichis about the energy consumption of humain beings on Earth for one year.The equivalent magnitude of the 5Mt atomic bomb of Hiroshima is 6.7. Thebiggest earthquake recorded on earth (Chile 1960) is of 9.5 magnitude.
From an engineering perspective once, for a given site, the Magnitudeand the Distance from a design earthquake is known some statistical ana-lyses lead to the average peak acceleration A. For instance for the Chichiearthquake in taiwan Ghang et al. get (CRAS Vol. 333 2001) :
ln(A(cms−2)) = −0.78 ln(D(km)) + 0.751These formula are often given in ergs as :
log10(Mo(dyne cm)) = 1.5ML + 16.3 = log10(E(ergs)) + 4.2

8
1.2.2 seismic Moment
When considering an uniform failure with a constant slippage ∆u alonga given surface S in an elastic medium with a shear modulus µ, the seismicMoment is given by :
Mo = µ∆uS
It is thus the product of a force by a displacement which can indeed becompared to a work or an energy but should better be seen as a momentsince µ is a shear modulus and not the actual stress. On the contrary one candefine the released energy as the mechanical work dissipated on the fault :
E = τ∆uS
with τ the mean shear stress on the fault during the earthquake. The aboverelationship E ≈ 10−4Mo suggests that the fault rupture occurs for shearstrains reaching 10−4.
1.3 Models of seismic sources
1.3.1 failure mechanism in the fault
As many other materials, rocks can endure a limited amount of shearstress. The corresponding yield shear stress τm is often related to the nor-mal stress σnn by mean of the Mohr-Colomb law. In the context of seismicfault, this means that the yield stress depends both on depth and on theregional stress field. Once the yield stress reached the material shows plasticdeformations or plastic flow until the shear level goes down to a new yieldstress τo < τm. This pecular constitutive behaviour implies that the plasticdeformation are localized along shear bands : the seismic faults (see figure1.2). Once the material has been soften along such shear bands the plasticdeformation will always occur along these bands. In a time range of a fewtenths of thousands years, earthquakes always occur along existing faults.Depending on regional condition the stress drop ∆τ = τm − τo ranges from3 to 10MPa.
Since the plastic deformation is localized on the fault it can be characte-rized by the resulting relative displacement along the fault denoted by ∆uand also called the slippage. It satisfies ∆u ·n = 0 with n the normal vectorof the fault. The amplitude of this displacement depends both on the sheardrop ∆τ and on the elastic properties of the surrounding soil.
The static or dynamic study of such a relationship is out of the scopeof the course but developments in fracture mechanics lead to the followingrelationship for a penny-shape crack with diameter L in a purely elasticmaterial :
∆τ =7π
16µ
∆u
L

9
Fig. 1.4 – Typical shear stress-distorsion curve
This leads to the following approximate expression for the seismic momentas a function of the fault length :
Mo ≈L3
4∆τ 3MPa ≤ ∆τ ≤ 10MPa
showing that the seismic moment is proportional to the length to the power3. This means that increasing the active length by one order of magnitudeadds 2 to the Richter magnitude. This lead to to simple formula :
S(km2) = 10ML−4
Moreover, this leads to a linear relationship between the slippage andthe fault length :
∆u =167π
∆τ
µL ≈ 10−4L
roughly observed in practice when the fault reaches the free surface as shownin figure 1.2. At last it is worth to notice that the corresponding releasedenergy reads :
E = τ∆uS =τ
µMo ≈
∆u
LMo
1.3.2 Kinematical source model
As already mentioned the seismic source can be seen as a displacementdiscontinuity [u] = d∆u in the earth along a given surface Σ with normalvector n. The generalized strain in a distribution sense associated to thisdisplacement jump reads2 :
ε = ∆ud⊗s nδΣ
2Let us consider a fault of thickness h in direction n and let us denote by xo any pointalong the mean surface of the fault. Assuming a linear variation of the displacement along

10
Assuming such a discontinuity in an elastic medium lead to the correspon-ding equivalent force :
fS = 2µdiv (∆u d⊗s nδΣ)
Since d · n = 0. Assuming a constant ∆u on the fault gives :
fS = mograd (δΣ)
with mo = 2µ∆u(d ⊗s n) the surface density of moment tensor. At lastwhen observed far enough from the source one can write δΣ = δoS leadingto the localized equivalent source :
fS = Mograd δo = Mo limh→0
1h
(dδ(
h
2n)− dδ(−h
2n) + nδ(
h
2d)− n(δ(−h
2d))
with Mo = Mo(d⊗n+n⊗d) the moment tensor corresponding to four forcesapplied around the epicenter : two opposite shear forces on both side of thefault and two forces on both side edge of the fault to balance the momentinduced by the two firsts (figure 1.5). This model is useful to understand theshear wave pattern induced by the fault rupture. These four forces can alsobe seen as two extension and two compression forces giving some insight onthe induced P wave pattern.
We have now to consider the time evolution of the seismic tensor. In-deed, before the earthquake the slippage is zero and remains constant afterthe earthquake. The simplest model for it is the step or Heaviside func-tion vanishing for negative times and equal to one for positive times. Let uswrite :
Mo(t) = MoH(t)
with H(t) the normalized time-history of the slippage. Since the elasticsolution for a single force f = δ(x− y)a reads in the far field :
uG(x,y,a, t) =er(er · a)4πρc2
prδ(t− r
cp) +
(a− er(er · a))4πρc2
srδ(t− r
cs)
with r = ‖x − y‖ and er = (x − y)/r, the far field induced by a localizedseismic moment reads :
u = Mo
∫ t
o(grad yu
G(x,y,n, t− τ)d+ grad yuG(x,y,d, t− τ)n)h(τ)dτ
n leads to :
u(xo + ζn) = u(xo) + ∆udζ
hζ = (x− xo) · n
and an almost uniform strain tensor inside the fault :
ε =1
h∆ud⊗s n + o(1)

11
Fig. 1.5 – Equivalent forces for a seismic source
since the derivatives of all terms except δ(t− rcp,s
) will bring a 1/r term thatwill vanish at large distances the following approximate holds :
u ≈ Mo
(2er(er · d)(er · n)
4πρc3pr
H ′(t− r
cp)
+n(er · d) + d(er · n)− 2er(er · n)(er · d)
4πρc3sr
H ′(t− r
cs))
(1.1)
Since their is roughly a factor of 2 between cp and cs, one can easily concludethat the second term is highly predominant leading to the final approximate :
u(x, t) ≈ uo(x)H ′(t− r
cs) (1.2)
uo(x) = Mon(er · d) + d(er · n)− 2er(er · n)(er · d)
4πρc3sr
(1.3)
As far as earthquake resistance of structure is concerned, the main quan-tity of interest is the acceleration. The previous formula shows that this ac-celeration is rather difficult to predict since it is given by the third derivativeof the time evolution of the seismic moment i.e. the third derivative of theslippage time-history. The approximate H ′ ≈ δ is too crude for this purpose.
1.3.3 Finite size effects and corner frequency
Even if the detailed time-history of the seismic motion seems difficult topredict some global tendency of the frequency content of the seismic motioncan be sought accounting for the fault size. Indeed considering a planar

12
rectangular fault Σ of size H × L in the e1 × e2 plane and centered on thereference frame. Accounting only for shear waves one has :
u ≈ 1S
∫Σuo(x− y)H ′(t− r
cs)dy (1.4)
Since a far field approximate is sought the first term in the integral is ap-proximated taking its value for y = 0. Taking the Fourier transform of thelast term with r ≈ ro − eo · y, ro = ‖x‖ and eo = x/ro leads to :
u = uo(ω)1S
∫Σ
exp(
iωeo · y
cs
)dy
with uo(ω) the frequency response for a localized seismic moment. Finallyone gets :
u = uo(ω)sinc(ωT1)sinc(ωT2)
with Tα = eo·eαLα2cs
and sinc(x) = sin(x)x .
As a consequence, the finite size of the source has for some directiona high-frequency filtering effect. The proposed model accounts only for aω−1 decay at high-frequencies whereas experimental results usually show aω−2 decay which can be modeled using a more complex time-history of theslip. As a conclusion one can take the following expression for the Fourieramplitude of the far-field response :
|u| = |uo|1 + (ω/ωo)2
with ωo the corner circular frequency defined as :
ωo ≈2cs
3√
S
1.4 Conclusion
Using simple source models we have been able to explain and to quantifybasic relationships between wave amplitudes, fault length, slippage, seismicmoment, energy, frequency spectrum. However these expressions are notalways consistent with the original Richter scale. Moreover the proposedmodels do not seem able to predict the maximum acceleration. At last, thepropagation medium has been considered as homogeneous whereas the seis-mic wave experience large velocity contrasts when reaching the free surface.As a consequence more detailed studies have to be conducted in order toquantify the local seismic field in the vicinity of structure to be designed.

Chapitre 2
The seismic motion for theengineers
2.1 Introduction
2.2 Seismic Regulation
The seismic motion to account for in seismic analyses is defined in Re-gulation codes in seismic countries and in particular the Eurocode 8 forEurope. They mainly consist in prescribed Peak Ground Accelerations andElastic Response Spectra at a given site.
2.2.1 Peak Ground Acceleration
The PGA (Peak Ground Acceleration) is the first important parameterdefined in the regulation since it is the essential parameter for a pseudo-static design. Since it hardly be given in term of source parameters, thisparameter is obtained through statistical analyses of the following form :
ag(m/s2) = ceαM (Rk + aeδM )−βeγ(Rk+b)1/k
with M the magnitude, and R the epicentral distance in km. One of themost commonly used law is given by Joyner & Boore (1981) reads :
ag =10M/4
Roe0.006Ro Ro = R + 53km
2.3 Normalized Response Spectra
Response Spectra Sd(T, ξ) are defined as the Maximum displacementrecorded on a Single Degree of Freedom dynamic system with prescribednatural Period T and damping coefficient ξ for a given input acceleration
13

14
time-history. Normalized Response Spectra are in fact envelops of actualResponse Spectra normalized with respect to a reference maximum accele-ration. They are usually given in terms of horizontal Pseudo-Spectral Acce-lerations :
SPSA = Sd
(2π
T
)2
These Spectra are expressed in terms of a few parameters as shown in figure2.1. These parameters depend on the type of soils (see figure 2.3) as givenin figure 2.2.
Fig. 2.1 – Normalized PSA Response Spectra
The analytical solution for these curves are :
T ≤ TB : SPSA = agS
(1 +
T
TB(2.5η − 1)
)TB ≤ T ≤ TC : SPSA = 2.5ηagS
TC ≤ T ≤ TD : SPSA = 2.5ηagSTCT
TD ≤ T ≤ 4s : SPSA = 2.5ηagSTCTD
T 2(2.1)
with S a soil coefficient and η = (10ξ + 0.5)−1/2 a normalized dampingcoefficient. These expressions lead to a constant Pseudo Spectral Velocityfor TC ≤ T ≤ TD and a constant Spectral displacement for TD ≤ T . Forlarge structures ag must be multiplied by a site amplification coefficient. Atlast, for a detailed dynamic analysis time-history acceleration are needed.Such functions can be either synthetic functions fitting a given spectra orrecorded acceleration that are rescaled to a proper amplitude. At last for

15
Fig. 2.2 – Values for the parameters of the Normalized PSA Response Spec-tra (in french)
Fig. 2.3 – Soil types in the Eurocode 8 (in french)

16
large structure the spatial correlation of the seismic wave field has to beaccounted for.
2.4 Models for the local wave field
When sites are located far enough from the seismic source and for deepseismic events (see figure 2.4), a typical seismic signal is composed of threeparts :
– The P waves : with moderate amplitudes mainly in the vertical direc-tion,
– The S waves : usually with the peak acceleration inside mainly pola-rized in the horizontal direction,
– The coda : made of low frequency surface waves.
Fig. 2.4 – Accelerations recorded during the Northridge earthquake
As observed in figure 2.4, the P wave part is usually dominated by thevertical component whereas the horizontal ones are stronger in the S andcoda parts. This observation suggests that the seismic motion can be seenas vertically incident plane waves. Moreover, it will be shown in the nextchapter that this hypothesis tends to maximize the effect of the seismicmotion on structures since all points of the foundation will move in phase.However this assumption has some drawbacks since such an uniform incidentfield does not directly load rocking or torsional modes of the structure. Atlast, for multi-supported structures such as bridges, such a assumption isnot always conservative since out of phase displacements of the foundationsare not accounted for.

17
This vertically incidence assumption can easily be justified by the strongwave velocity contrast between superficial and and deep geological forma-tion. Indeed beneath a few hundreds of meters, the shear wave velocityreaches a constant value of about 3.5-5km/s whereas the P wave velocity isin the range 8-12km. As far as superficial geological formations are concer-ned the S-wave velocity ranges from 80 to 800 m/s and the P-wave one from800 to 2000 m/s. For a horizontally layered media the Snell-Descartes lawof refraction tells us that :
sin θ
c= cst
with θ the incidence angle and c the wave velocity. The incident angle onthe free surface reads :
θsurf = arcsin(
csurf
cdeepsin θdeep
)≈ 0

Chapitre 3
Interaction sol-structurelineaire
Les interactions dynamiques sol-structure jouent un role preponderantdans la justification sismique des grandes structures telles que des barragesou des centrales nucleaires ou de structures plus petites fondees sur des solssouples (voir [49, 50, 19, 1, 78, 33, 43, 18, 48, 42, 51, 76, 68, 2, 3, 38, 77,17, 71, ?, 25, 16, 34, 35, 62, 72, 56]). Avant d’etudier ce phenomene et lesoutils theoriques et pratiques pour l’aborder, nous donnerons dans le cha-pitre E quelques rappels de dynamique des structures ainsi que les methodesapplicables lorsque cette interaction peut Itre negligee, et en particulier lesmethodes spectrales.
Classiquement l’interaction sol-structure est decomposee dans le cas lineaireen interaction inertielle preponderante lorsque la structure est massive, eten interaction cinematique principalement mobilisee pour des fondationsenterrees et des ondes a incidence inclinee. L’analyse des phenomenes serad’abord realisee dans le cas de fondations rigides (chapitre 3). Toutefois,avant d’aborder ces differents themes nous donnerons quelque notation generalesainsi que quelques rappels de dynamique des structures (chapitre E).
3.1 Geometrie et notations
Le domaine d’etude Ω est constitue de trois sous-domaines : le sol Ωs
non-borne, la structure Ωb bornee et la fondation Ωf . Ces domaines sontsepares par les interfaces Σbf et Σsf , sur le reste de leurs frontieres respecti-vement notees Γba, Γsa et Γfa, des conditions de surface libre sont imposees.Les champs de deplacements permanents sur Ωs, Ωb et Ωf dus aux chargesstatiques notes uso(x), ubo(x) et ufo(x) sont supposes connus et on ne s’in-teresse qu’aux perturbations dynamiques notees us(x, t), ub(x, t) et uf (x, t)et supposees petites. Ces perturbations sont dues au seisme represente parun champ incident ou champ libre uinc(x, t), defini comme le champ qui
18

19
Ω Γbab
Γbf
uincΓsf
Ωf Ωs
Γsa
Fig. 3.1 – Geometrie et notations
regnerait dans le sol en l’absence de la structure et sa fondation. Ce champest suppose connu. Dans la suite, σs(us) et σb(ub) designent les tenseurs descontraintes associees aux champs us et ub dans chacun des domaines. Onsupposera que les contraintes se decomposent en une partie elastique lineaireσe et une partie dissipative σd. ts(us) et tb(ub) representeront les vecteurscontraintes s’exercant sur les interfaces orientees par la normale exterieuren, soit pour tout vecteur a :
ts(us) · a = σ(us) : (n⊗ a) (3.1)σ(us) = λs(div us)Id + 2µsε(us) (3.2)εij(u) = 1/2(∂iuj + ∂jui) (3.3)
: designant la contraction de deux tenseurs, · le produit scalaire et ⊗ leproduit tensoriel de deux vecteurs. Sous une hypothese de petites perturba-tions, les champs us, uinc satisfont les equations de Navier dans le sol, alorsque le champ ub satisfait a ces mImes equations dans la structure :
div σb(ub) = ρb∂ttub dans Ωb (3.4)div σs(us) = ρs∂ttus , div σs(uinc) = ρs∂ttu
inc dans Ωs (3.5)
En l’absence de decollement entre la structure et la fondation et entre lafondation et le sol nous avons de plus les conditions cinematiques suivantes :
ub = uf sur Σbf (3.6)us = uf sur Σsf (3.7)
auxquelles s’ajouteront l’equilibre de la fondation Ωf et des conditions ini-tiales ad hoc.

20
3.2 Introduction
Dans le chapitre E nous avons etudie les vibrations d’une structure sou-mise a un deplacement impose a sa base. Nous allons a present traiter l’in-teraction entre le sol et la structure en essayant de reutiliser les outils dejadeveloppes. Nous proposerons ainsi une methode de sous-structuration dy-namique incluant trois domaines : la structure, le sol et la fondation. Onnotera toutefois une difference majeure entre ces domaines, le premier etantborne et deformable, le second egalement deformable mais infini, le troisiemepouvant etre en premiere approximation considere comme rigide.
En utilisant cette decomposition nous montrerons dans la section 3.4que l’analyse se resume a une equation d’interaction sol-structure dont nousdetaillerons les differents elements et en particulier les impedances 3.5, l’in-teraction cinematique 3.6, ainsi de l’interaction inertielle 3.7. Ces resultatsseront etendus au cas de l’interaction entre plusieurs batiments a la section3.8 et au cas de fondations souples a la section 3.9. Nous aborderons a lasection 3.10 la variabilite du champ incident.
Avant d’aborder ces differents points nous rappelons quelques resultatsconcernant les equations de l’elastodynamique ecrites dans le domaine desfrequences ainsi que la notion de champ incident, champ diffracte, d’amor-tissement ainsi que le principe de reciprocite.
3.3 Elastodynamique dans le domaine des frequences
La principale difficulte d’un point de vue mathematique est le caracterenon borne du sol, la presence de la surface libre apportant une difficultesupplementaire ainsi que l’existence d’une eventuelle d’une stratification.Un element majeur pour la validite de l’analyse est le caractere borne del’interface Σsf , la prise en compte d’un amortissement nous permettra delever le reste des difficultes. Nou travaillerons dans le domaine des frequencesou le champ us(x, ω) 1, doit satisfaire a toute frequence ω :
div σs(us) = −ρsω2us dans Ωs (3.8)
ts(us) = 0 sur Γsa (3.9)us = uf sur Σsf (3.10)
Ce champ est cree par un champ incident uinc(x, ω) venant de l’infini que l’onsupposera connu au moins dans un premier temps, et qui satisfera toujours :
div σs(uinc) = −ρsω2uinc dans Ωs (3.11)
ts(uinc) = 0 sur Γsa (3.12)1dans ce chapitre toutes les equtions seront ecrites dans le domaine des frequences et
nous omettrons donc les b. pour alleger les notations.

21
Ainsi on pourra definir sur Ωs le champ diffracte ud = us−uinc qui satisferaalors :
div σs(ud) = −ρsω2ud dans Ωs (3.13)
ts(ud) = 0 sur Γsa (3.14)ud = uf − uinc sur Σsf (3.15)
En presence d’amortissement, uinc de sera pas borne, mais par contre sarestriction a Σsf le sera. De plus on pourra supposer ud d’energie finie surΩs tandis que l’energie dissipee Ed sera strictement positive et bornee :
Ep(ud) + Ec(iωud) =12<(∫
Ωb
σb(ud) : ε(ud)dV
)(3.16)
+12ω2
∫Ωb
ρbud · uddV < +∞ (3.17)
0 < Ed(ud) = =(
12
∫Ωb
σb(ud) : ε(ud)dV
)< +∞ (3.18)
Principe de reciprocite Considerons deux champs ud et u′d satisfai-sant les equations (3.13) et (3.14), alors, par integration par parties de cesequations nous obtenons le principe de reciprocite suivant :∫
Σsf
ts(ud) · u′d − ts(u′d) · uddS = 0 (3.19)
et notons que ce resultat serait faux si nous avions utilise les conjugues, lesoperateurs associes etant symetriques mais non hermitiens. Cette proprieteajoutee au fait que le domaine est non borne, nous empeche d’effectuer unedecomposition spectrale de ud comme cela avait ete fait pour la structure.La fait que le sol soit infini implique egalement que les mouvements de corpsrigide ne sont pas d’energie finie sur Ωs.
3.4 Fondation rigide
Dans un premier temps, nous considerons la structure separee du sol parune fondation rigide Ωf dont le champ de deplacement uf se decomposesous la forme :
uf (x, ω) =6∑
k=1
ck(x)ψk(x) (3.20)
les ψk(x) etant six modes de corps rigides independants, dans l’ordre troistranslations suivant trois axes orthogonaux et trois rotations autour de cestrois memes axes. L’equilibre de cette fondation se resume a l’equilibre des

22
forces et des moments que nous ecrirons en utilisant le principe de travauxvirtuels :∫
Σsf
ts(us) · vfdS +∫
Σbs
tb(ub) · vfdS − ω2
∫Ωf
ρfuf · vfdV = 0
soit pour tout vf = ψk′ :∫Σsf
ts(us) ·ΨdS +∫
Σbs
tb(ub) ·ΨdS − ω2Mfc = 0 (3.21)
[Mf ]kk′ =∫
Ωf
ρfψk ·ψk′dV(3.22)
[Mf ] etant la matrice de masse de la fondation 2.Nous avons deja montre dans le chapitre E que le champ de deplacement
de la structure pouvait etre decompose sous la forme :
ub(x, ω) = U b(x, ω)cinc =n∑k=1
ubk(x, ω)cinck (3.23)
les champs ubk etant obtenus a partir de l’equation (E.74). Nous avonsegalement montre par integation par parties de l’integrale sur Σbf que ceterme prend la forme d’une masse Mb et d’une masse ajoutee M∗
b(ω) per-mettant d’ecrire :∫
Σsf
ts(us) ·ΨdS − ω2 (Mb + M∗b(ω) + Mf ) c = 0 (3.24)
3.4.1 Champ diffracte local et champs rayonnes
Une decomposition similaire peut etre effectuee dans le sol en remarquantque le raccord cinematique sur Σsf s’ecrit :
ud = uf − uinc =6∑
k=1
ψk − uinc sur Σsf (3.25)
On en deduit la decomposition suivante du champ diffracte ud :
ud =6∑
k=1
udk + udo sur Σsf (3.26)
2Cette matrice est diagonale si les rotations sont definies autour des axes principauxd’inertie passant par le centre de gravite, les trois premiers termes diagonaux etant lamasse de la fondation, les trois derniers etant les inerties de rotation autour de ces troisaxes.

23
le champ diffracte local udo verifiant :
div σs(udo) = −ρsω2udo dans Ωs (3.27)
ts(udo) = 0 sur Γsa (3.28)udo = −uinc sur Σsf (3.29)
et les champs rayonnes udk verifiant :
div σs(udk) = −ρsω2udk dans Ωs (3.30)
ts(udk) = 0 sur Γsa (3.31)udk = ψk sur Σsf (3.32)
En injectant cette decomposition dans l’equilibre de la fondation, nous ob-tenons l’equation d’interaction sol-structure :
Ks(ω)− ω2 (Mf + Mb + M∗b(ω))c = fs (3.33)
avec Ks la matrice d’impedance du sol et fs le vecteur des forces sismiquesinduites :
[Ks]kk′ =∫
Σsf
ts(udk) ·ψk′dS (3.34)
fTs = −∫
Σsf
tb(uinc + udo) ·ΨdS (3.35)
Nous sommes ainsi conduits a la resolution d’un systeme lineaire a toutesles frequences ω, les champs de deplacements dans la structure, le sol etla fondation etant ensuite obtenus a l’aide des formules de recomposition(E.74) (3.25) et (3.20). Par rapport a une analyse classique de dynamique desstructures, ou la structure fonctionnait en deplacements imposes a la base,nous avons introduit ici les termes d’impedance Ks representant la rigiditedu sol et de forces induites f caracteristiques du chargement sismique.
3.5 Impedance de fondation
L’impedance du sol a dans le cas de fondations rigides, une interpretationtres simple. Pour ce faire concentrons nous sur le terme [Ks]11 correspondantau travail virtuel sur un mouvement de translation des contraintes induitespar cette meme translation imposee a la fondation. Physiquement ce terme n’est autre que la composante dans la direction 1 de l’effort qu’il est necessaired’imposer a la fondation pour la deplacer dans cette meme direction. De lameme facon, on interpretera le terme [Ks]15 comme un moment.

24
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
pulsation adimensionnelle
part
ie r
eelle
referencemodelisation Amodelisation Bmodelisation C
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
3
pulsation adimensionnelle
part
ie im
agin
aire
referencemodelisation Amodelisation Bmodelisation C
Fig. 3.2 – Impedance en translation verticale d’une fondation circulaire repo-sant sur un demi-espace homogene : partie reelle et partie imaginaire en fonc-tion de la frequence adimensionnelle ao = ωr
cset normalisee par l’impedance
statique :Kv = 4µr1−ν .
Notons que par application du principe de reciprocite, la matrice d’impedanceest symetrique. En effet :
[Ks]kk′ =∫
Σsf
ts(udk) ·ψk′dS =∫
Σsf
ts(udk) · udk′dS
=∫
Σsf
ts(udk′) · udkdS = [Ks]k′k (3.36)
Lorsque la fondation possede des symetries suffisantes (fondation axisymetrique,fondation carree...), cette matrice est presque diagonale et seul subsiste unterme de couplage entre les translations horizontales et les rotations d’axehorizontal. On note sur les figures 3.5 a 3.5 que dans le cas de fondations su-perficielles la partie reelle de l’impedance varie peu avec la frequence, alorsque la partie imaginaire croit presque lineairement. Ce partie imaginairecorrespond donc a un amortissement visqueux traduisant l’amortissementgeometrique du sol. En effet, la vibration de la fondation induit des ondesdans le sol. Certaines de ces ondes se propagent jusqu’a l’infini et dispersentainsi de l’energie. Ce phenomene apparaıt meme en l’absence d’amortisse-ment dans le sol.

25
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4
pulsation adimensionnelle
part
ie r
eelle
referencemodelisation Amodelisation Bmodelisation C
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
pulsation adimensionnelle
part
ie im
agin
aire
referencemodelisation Amodelisation Bmodelisation C
Fig. 3.3 – Impedance en translation horizontale d’une fondation circulairereposant sur un demi-espace homogene : partie reelle et partie imaginaireen fonction de la frequence adimensionnelle ao = ωr
cset normalisee par
l’impedance statique : Kh = 8µr2−ν .

26
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
pulsation adimensionnelle
part
ie r
eelle
referencemodelisation Amodelisation Bmodelisation C
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
pulsation adimensionnelle
part
ie im
agin
aire
referencemodelisation Amodelisation Bmodelisation C
Fig. 3.4 – Impedance en balancement d’une fondation circulaire reposant surun demi-espace homogene : partie reelle et partie imaginaire en fonction de lafrequence adimensionnelle ao = ωr
cset normalisee par l’impedance statique :
Kr = 8µr3
3(1−ν) .

27
0 0.5 1 1.5 2 2.50
0.2
0.4
0.6
0.8
1
1.2
pulsation adimensionnelle
part
ie r
eelle
referencemodelisation Amodelisation Bmodelisation C
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
pulsation adimensionnelle
part
ie im
agin
aire
referencemodelisation Amodelisation Bmodelisation C
Fig. 3.5 – Impedance en torsion d’une fondation circulaire reposant sur undemi-espace homogene : partie reelle et partie imaginaire en fonction de lafrequence adimensionnelle ao = ωr
cset normalisee par l’impedance statique :
Kt = 16µr3
3 .

28
3.6 Interaction cinematique
L’interaction cinematique sol-structure est definie comme le mouvementque subirait la fondation supposee de masse nulle et en l’absence de batiment.Ce mouvement est entierement caracterise par le vecteur co solution de :
Ks(ω)co = fs (3.37)
En utilisant cette relation dans l’equation d’ISS (3.33), il est possible d’eliminerla force induite fs pour obtenir :
Ks(ω)− ω2 (Mf + Mb + M∗b(ω))(c− co) = ω2 (Mf + Mb + M∗
b(ω)) co(3.38)
correspondant aux vibrations d’une structure soumise a un deplacement im-pose co a sa base et ayant une rigidite additionnelle Ks(ω) sur sa fondation.Ainsi, la definition de co permet de passer d’un probleme de forces imposeesa un probleme en deplacements imposes.
Afin d’evaluer l’effet de la fondation, donnons tout d’abord une expres-sion equivalente de la force induite independante du champ udo. En utilisantle principe de reciprocite nous avons :
[fs]k = −∫
Σsf
ts(uinc + udo) ·ψkdS
= −∫
Σsf
ts(uinc) ·ψkdS −∫
Σsf
ts(udo) · udkdS
= −∫
Σsf
ts(uinc) ·ψkdS −∫
Σsf
ts(udk) · udodS
=∫
Σsf
ts(udk) · uincdS −∫
Σsf
ts(uinc) ·ψkdS (3.39)
Dans le cas particulier d’une fondation superficielle, ts(uinc) s’annulant pardefinition sur la surface libre, nous obtenons :
[fs]k =∫
Σsf
ts(udk) · uincdS
Soit, lorsque le champ uinc est une onde plane a incidence verticale se ra-menant a une translation sur la surface Σsf :
fs = uinc ·
(∫Σsf
ts(Ud)dS
)= Ksu
inc
co = uinc (3.40)
Ainsi, dans le cas particulier de fondations superficielles soumises a des ondesa incidence verticale, il n’y a pas d’interaction cinematique. Dans les autres

29
cas, la fondation rigide joue un role de filtrage du champ incident, co etantles coefficients de la projection de uinc sur la base des mouvement de corpsrigide, la projection etant effectuee par multiplication par les champs ts(udk)et integration sur Σsf (cf. chapitre E section E.6).
3.7 Interaction inertielle
L’interaction inertielle est liee aux resonances pouvant impliquer l’en-semble sol-structure. En effet, l’equation (3.33) est caracteristique d’un systemedynamique pouvant resonner pour des frequences ωl telles que :
det(Ks(ωl)− ω2
l (Mf + Mb + M∗b(ωl))
)= 0 (3.41)
du fait de l’amortissement geometrique, ces frequences ne peuvent etre reelles,la petite partie imaginaire traduisant l’amortissement associe. Notons queKs(ωl) et M∗
b(ωl) n’etant pas quadratiques en fonction de la frequence, cesresonances ne sont pas strictement comparables a des resonances de struc-ture. En particulier on ne pourra construire une base complete de modespropres associes.
3.8 Interaction entre batiments
La generalisation des resultats precedents au cas de plusieurs batimentsayant des fondations rigides est immediate. En effet pour chaque batimentΩbK nous avons :
ufK(xK , ω) =6∑
k=1
cKk(x)ψKk(x) (3.42)
et donc :∫ΣsfK
ts(us) ·ΨKdS − ω2 (MbK + M∗bK(ω) + MfK) cK = 0 (3.43)
En decomposant le champs dans le sol sous la forme :
ud =∑Kk
udKk + udo sur Σsf (3.44)
le champ diffracte local udo verifiant :
div σs(udo) = −ρsω2udo dans Ωs (3.45)
ts(udo) = 0 sur Γsa (3.46)udo = −uinc sur ∪KΣsfK (3.47)

30
et les champs rayonnes udk verifiant :
div σs(udKk) = −ρsω2udKk dans Ωs (3.48)
ts(udKk) = 0 sur Γsa (3.49)udKk = ψKk sur ΣsfK (3.50)udKk = 0 sur ΣsfK′ , K ′ 6= K(3.51)
(3.52)
Nous obtenons :
Ks(ω)− δKK′ω2 (MfK + MbK + M∗bK(ω))c = fs (3.53)
δKK′ valant 1 si K = K ′ et 0 sinon.
3.9 Fondation souple
L’extension au cas de fondations souple est immediate egalement en re-prenant les expressions obtenues pour l’impedance de la structure dans lecas multi-supporte et en supposant la masse de la fondation reduite a 0. Onobtient alors pour les coefficients c l’equation suivante :
Ks(ω) + Kψ − ω2(Mψ + M∗
ψ(ω))c = fs (3.54)
3.10 Variabilite du champ incident
L’etude de la variabilite due au champ incident ne pose pas de problemestheoriques majeurs. En effet, il est aise de verifier que la force induite fsdepend lineairement du champ incident. De plus c, en temps que solutiond’un systeme lineaire, depend donc lineairement de fs et donc de uinc, pro-priete qui se transmettra a tous les champs dans la structure ou dans le solpar les equations de decomposition (E.74) et (3.25).

Chapitre 4
Equations integrales etelements de frontiere
4.1 Introduction
Apres avoir etudie la diffraction d’ondes planes elastiques sur des obs-tacles plans dans un espace tri-dimensionnel, nous envisageons maintenantla diffraction des ondes elastiques sur un ou plusieurs obstacles de geometriesquelconques. Afin de resoudre ce probleme, nous nous placons dans le do-maine des frequences en effectuant une transformation de Fourier sur l’equationde Navier en temps. Les conditions initiales apparaissent alors au secondmembre de l’equation transformee ( cf. Chap. ?? ). Dans le cas d’un problemed’elastodynamique pose sur un domaine borne de R3 nous montrons dansune premiere partie que le probleme pose sur le volume peut se reduire a unprobleme pose sur la frontiere du domaine a l’aide d’une equation integrale.Dans un second temps, nous generaliserons ce resultat a des domaines non-bornes. Nous montrons alors que cette methode s’applique a des problemesaux limites dont la solution est approchee dans la quatrieme partie parune methode d’elements finis de frontiere. Cette methode numerique pou-vant etre instable, nous envisageons dans un dernier temps une methode deregularisation de ce probleme.
Notons que la methode des equations integrales et des elements finis defrontiere presentee succintement ici sont des methodes generales de resolutiondes equations aux derivees partielles lineaire posee sur des domaines relati-vement homogene1. Si la premiere existe depuis plus d’un siecle, la secondeest plus recente en particulier pour l’elastodynamique, principalement dufait de problemes numeriques d’integration.
1Ces methodes ont par la suite ete etendues au cas de problemes non-lineaires etheterogenes [?]. Toutefois, dans la mesure ou il n’est plus possible de se ramener unique-ment sur la frontiere du domaine, leur interet par rapport a des methodes variationnellesclassiques de type elements finis volumiques [79] apparaıt reduit.
31

32
Le lecteur desirant approfondir les aspects theoriques et pratiques lies aces methodes pourra se reporter a la bibliographie et en particulier a :
– [?, 9] pour les applications en mecanique,– [5, 14, 23] pour un panorama general,– [20, 31, 53, 21, 24] pour les aspects mathematiques,– [22] pour la mecanique de la rupture,– [27] pour l’elastodynamique.
4.2 Rappels
Nous rappelons ici la formule de Green-Maxwell ainsi que les notationsqui seront utilisees pour l’etablissement des equations integrales. Nous rap-pellerons egalement la definition et les expression des fonctions de Greend’un milieu elastique homogene.
4.2.1 Notations
Soit un domaine Ω, ouvert et borne de R3, constitue d’un materiauelastique homogene et Γ, sa frontiere supposee differentiable en tout point.Soient deux champs u et v, reguliers dans Ω, nous noterons :
(u,v)Ω =∫
Ωu · vdV (4.1)
4.2.2 Formule de Green-Maxwell
[45]
Definition 1 Un champ elastodynamique u defini dans un ouvert Ω ⊂ R3
est dit elastodynamique si il est regulier et si il verifie les equations ho-mogenes de l’elastodynamique stationnaire dans Ω.
div σ(u)− ρω2u = 0
Avec σ(u) le tenseur des contraintes elastiques defini par :
σ(u) = C : ε(u)
Theoreme 1 Si u et v sont deux champs elastodynamiques dans Ω, ettn(u), tn(v) les vecteur-contraintes crees par les champs u et v s’exercantsur la frontiere Γ de normale exterieure n, alors ils verifient :∫
Γtn(u) · vdS −
∫Γtn(v) · udS = 0 (4.2)

33
Demonstration: Soient u et v deux champs elastodynamiques dans Ω, nous avonspour x dans Ω : L’application du principe des travaux virtuels nous donne pourtout champ v cinematiquement admissible :
(σ(u), ε(v))Ω − ω2(ρu,v)Ω =∫
Γ
tn(u) · vdS
De meme pour u :
(σ(v), ε(u))Ω − ω2(ρv,u)Ω =∫
Γ
tn(v) · udS
Les premiers termes de ces deux equations etant symetriques par rapport a u et av, nous obtenons par soustraction la formule 4.2.
Dans le cas ou u et v sont des champs elastodynamiques crees par desforces de volume fu et fv, definies dans Ω, la formule de Green-Maxwelldevient :∫
Γtn(u) · vdS −
∫Γtn(v) · udS + (fu,v)Ω − (fv,u)Ω = 0 (4.3)
4.2.3 Fonction de Green
Soit uG(ξ,x,a) la fonction de Green, solution elementaire de l’equationde l’elastodynamique pour une force ponctuelle de direction a placee aupoint ξ :
(λ + µ)grad div ug + µ∆ug + ρω2ug + δξ(x)a = 0 (4.4)
nous avons (cf. chapitre B) :
µug(ξ,x,a) = g(ksr)a+ (1/k2s)grad div ((g(ksr)− g(kpr))a) (4.5)
g(kαr) = eikαr/4πr kα = ω/cα α = p, s
er = (x− ξ)/‖x− ξ‖ r = ‖x− ξ‖ (4.6)
On verifie que cette solution elementaire est elastodynamique seulement surR3 − ξ. Au point source ξ, elle comporte une singularite de la forme :
lim‖x−ξ‖→0
‖ug(ξ,x,a)‖ = O(‖x− ξ‖−1) (4.7)
lim‖x−ξ‖→0
‖tn(ug)(ξ,x,a)‖ = O(‖x− ξ‖−2) (4.8)
Conditions de decroissance et de radiation
Soit Ω un ouvert de R3 dont le complementaire dans R3 est borne etde frontiere Γ reguliere, et u un champ de deplacements regulier sur Ω.Nous voulons que u represente un champ d’ondes diffractees par l’obstacle

34
de frontiere Γ, il semble donc naturel d’imposer a u de decroıtre a l’infini,l’influence de l’obstacle s’amenuisant avec la distance. De plus, asymptoti-quement, l’obstacle diffractant peut apparaıtre comme une source ponctuellede diffraction, nous imposerons donc au champ diffracte u un comportementasymptotique a l’infini equivalent a celui du champ cree par une source ponc-tuelle, soit :
lim‖x‖→∞
‖u(x)‖ = O(1/‖x‖) (4.9)
Cette condition n’est pourtant pas suffisante pour assurer l’unicite de lasolution recherchee, car des ondes provenant de l’infini et se propageant versl’interieur du milieu ne sont pas filtrees par cette condition, quoiqu’ellessoient physiquement inadmissibles. Nous devons donc de plus imposer desconditions de radiation. On impose alors au champ u d’avoir loin de lasource et dans toutes les directions un comportement localement identiquea celui d’une onde plane de compression ou de cisaillement se propageant del’obstacle vers l’infini.
La relation d’impedance locale d’une onde plane se propageant dans ladirection n pour une facette de direction n, donne :
σnn(u) = iωcpun(x)ttn(u) = iωcsu
t(x) (4.10)
avec :
un = u · n ut = u− unn (4.11)σnn = tn · n ttn = tn − σnnn (4.12)
Les conditions imposees sur le champ u, dites conditions de radiation deSommerfeld, s’expriment alors pour un vecteur unitaire n de direction x :
lim‖x‖→∞
σnn(u)(x)− iωcpun(x) = o(1/‖x‖)
lim‖x‖→∞
‖ttn(u)(x)− iωcsut(x)‖ = o(1/‖x‖) (4.13)
Il est utile de verifier que la fonction de Green ug(ξ,x,a) appartient bien ala classe de fonction que nous nous sommes definis. Il est immediat qu’elleverifie les conditions de decroissance a l’infini, de plus, du fait du choixeffectue au chapitre B, elle verifie aussi la condition de radiation de Som-merfeld. Les conditions de decroissance et de radiation nous permettent doncmaintenant d’assurer l’existence et l’unicite du probleme integrale pose surun domaine non borne.

35
4.3 Equations integrales
Nous cherchons maintenant a resoudre pour un champ de deplacementsu regulier sur Ω, le probleme de conditions aux limites en elastodynamiquestationnaire suivant :
Trouver u, un champ elastodynamique dans Ω, tel que :
f(tn(u),u) = 0 sur Γ (4.14)
L’utilisation de la formule de Green-Maxwell pour un champ elastodynamiquequelconque v nous fournit formellement le probleme suivant, pose unique-ment sur la frontiere :
Quel que soit v regulier et elastodynamique,∫Γtn(u) · vdS −
∫Γtn(v) · udS = 0
f(tn(u),u) = 0 sur Γ (4.15)
Par exemple, dans le cas de conditions aux limites en deplacements imposessur la frontiere, ce probleme revient a trouver le champ de contraintes t telque :
Quel que soit v regulier et elastodynamique,∫Γt · vdS =
∫Γuo
tn(v) · uodS
etant le vecteur-deplacements impose sur la frontiere Γ.Dans cette section, nous allons montrer qu’en prenant v = ug, il est
possible a la fois de resoudre ce probleme aux limites, c’est a dire :– de construire u dans Ω sous forme d’une representation integrale a
partir des champs u et tn(u) sur la frontiere Γ,– de construire u et tn(u) sur Γ a l’aide d’une equation integrale de
frontiere sur Γ a partir des conditions aux limites (4.15).Ces resultats prennent la forme du theoreme suivant :
Theoreme 2 Pour Ω ouvertde R3 constitue d’un materiau elastique ho-mogene de frontiere Γ reguliere et bornee et pour un champ de deplacementsu elastodynamique regulier :∫
Γtn(u)(x) · ug(ξ,x,a)dS −
∮Γtn(ug)(ξ,x,a) · u(x)dS = κ(ξ)u(ξ) · a
κ(ξ) = 1 pour ξ ∈ Ω) (4.16)κ(ξ) = 1/2 pour ξ ∈ Γ (4.17)
κ(ξ) = 0 pour ξ 6∈ Ω ∪ Γ (4.18)
Ces resultats seront etablis d’abord dans le cas d’une domaine borne, puisetendus au cas d’un domaine non-borne.

36
Ω
a
ξ
Γε
Sε
Ω
Γ
ξa
Ω
a
ξ
Γ
Sε
Fig. 4.1 – Domaine borne, force a l’exterieur du domaine, a l’interieur etsur la frontiere
4.3.1 Theoreme de representation
Pour tout ouvert borne Ω et tout ξ 6∈ Ω ∪ Γ (cf. figure 4.3.1), la fonc-tion de Green ug etant reguliere sur Ω la formule de Green-Maxwell donneimmediatement la formule (4.18) :∫
Γtn(u) · ugdS −
∫Γtn(ug) · udS = 0
Si le point ξ appartient a Ω (cf. figure 4.3.1), le champ ug n’est plus reguliersur Ω. Toutefois, Ω etant ouvert il existe un ε strictement positif tel queBε(ξ), la boule fermee de centre ξ et de rayon ε soit incluse dans Ω. SoitSε(ξ), la surface de cette boule. Nous avons alors les deux resultats :
limε→0
∫Sε(ξ)
ug(ξ,x,a)dS(x) = 0 (4.19)
limε→0
∫Sε(ξ)
tne(ug(ξ,x,a))dS(x) = −a (4.20)
ne etant la normale exterieure a la sphere. Demonstration: D’apres (4.7), lafonction de Green ug etant en O(1/‖ξ − x‖) donc en O(1/ε), la premiere limite(4.19) est immediate. Si nous ecrivons de plus l’equilibre de la boule Bε(ξ), nousavons :∫
Sε(ξ)
tnext(ug(ξ,x,a))dS(x) + a+
∫Bε(ξ)
ρω2ug(ξ,x,a))dV (x) = 0
Le terme de force d’inertie est en O(ε2) et est donc negligeable, nous fournissantainsi la deuxieme limite (4.20).
Nous pouvons maintenant appliquer la formule de Green-Maxwell surle domaine ouvert Ωε = Ω \ Bε(ξ) en prenant v = ug(ξ,x,a), ug etantelastodynamique sur Ωε :∫
Γtn(u) · ugdS −
∫Γtn(ug) · udS =∫
Sε(ξ)tne(u) · ugdS −
∫Sε(ξ)
tne(ug) · udS

37
Si nous prenons la limite de cette egalite lorsque ε tend vers zero, tn(u) etu etant reguliers au voisinage de ξ, nous pouvons ecrire :
limε→0
∫Sε(ξ)
tn(u) · ugdS = 0
limε→0
∫Sε(ξ)
tne(ug) · udS = u(ξ) · (lim
ε→0
∫tne(u
g)dS = −u(ξ) · a
Soit finalement pour ξ dans Ω le theoreme de representation (4.16) :∫Γtn(u) · ugdS −
∫Γtn(ug) · udS = u(ξ) · a (4.21)
Il apparait donc que si le vecteur-deplacements u et le vecteur-contraintestn(u) sont donnes sur la frontiere Γ, le champ u est connu partout a l’interieurde Ω par la formule precedente.
4.3.2 Equations integrales
Il nous faut maintenant generaliser cette expression au cas ou ξ le pointd’appliquation de la force est sur la frontiere (cf. figure 4.3.1). Soit Bε(ξ) laboule fermee de centre ξ et de rayon ε, Ωε defini par :
Ωε = Ω \Bε(ξ)
Γε la frontiere de Ωε et ∂Bε(ξ) l’intersection de Sε(ξ) et de Γε :Nous avons alors pour tout point ξ de Γ supposee reguliere :
limε→0
∫∂Bε(ξ)
ug(ξ,x,a)dS(x) = 0 (4.22)
limε→0
∫∂Bε(ξ)
tne(ug(ξ,x,a))dS(x) = −1/2a (4.23)
ne etant la normale exterieure a la sphere, et ni la normale interieure.Demonstration: La premiere limite est immediate du fait du comportement
asymptotique de ug en O(1/ε), quant a la seconde, il est necessaire d’effectuer undeveloppement asymptotique de tne(u
g), et d’integrer en coordonnees spheriques.Nous laissons au lecteur le soin d’effectuer ce calcul.
La formule de Green-Maxwell appliquee au domaine Ωε et au champ ug
regulier dans Ωε, donne :∫Γε−∂Bε
tn(u) · ugdS −∫
Γε−∂Bεtn(ug) · udS
=∫∂Bε
tn(u) · ugdS −∫∂Bε
tni(ug) · udS

38
ΩR
a
ξ
Γε
Sε
R SR
Fig. 4.2 – Domaine borne, Point ξ hors du domaine, dans le domaine et surla frontiere
Soit apres un passage a la limite l’expression (4.17) :∫Γtn(u)(x) · ug(ξ,x,a)dS −
∮Γtn(ug)(ξ,x,a) · u(x)dS = 1/2u(ξ) · a
Cette expression constitue donc une equation integrale posee sur la frontieredu domaine. Il est important de noter que ces integrales sont issues d’unpassage a la limite particulier faisant tendre une demi sphere entourant lepoint ξ vers zero. Ces integrales ne sont donc a priori definies qu’au sens dela valeur principale de Cauchy, c’est a dire suivant le passage a la limite surune sphere. ug et tn(ug) sont appeles les noyaux de ces integrales. En fait,la premiere integrale faisant intervenir ug n’est que faiblement singuliere aupoint ξ du fait du comportement asymptotique en 1/‖x − ξ‖, et est doncintegrable au sens usuel. Par contre, la seconde integrale n’a de sens quecomme valeur principale de Cauchy.
4.3.3 Equations integrales en domaines non bornes
Nous avons vu au chapitre precedent une formulation integrale de la dif-fraction des ondes a l’interieur de domaines bornes de R3, nous allons main-tenant la generaliser a des domaines infinis, plus representatifs de problemesreels tels que la diffraction d’ondes sur des obstacles plonges dans un mi-lieu infini. Pour ce faire, afin d’assurer des conditions d’unicite de la solu-tion, nous allons nous restreindre a des classes de fonctions verifiant cer-taines proprietes, puis par passage a la limite sur le probleme borne, nousgeneraliserons les resultats deja obtenus a des domaines infinis.
Soit Ω un ouvert de R3 de frontiere Γ reguliere et bornee, et u un champde deplacements regulier sur Ω. Il existe un reel positif R tel que BR la boule

39
ouverte centree a l’origine et de rayon R contienne toute la frontiere Γ. SoitΩR l’ouvert intersection de Ω et de BR, et ∂ΩR sa frontiere (∂ΩR = Γ∪SR).ΩR etant un ouvert borne, nous pouvons lui appliquer les resultats obtenusprecedemment (4.18), avec n la normale exterieure au domaine ΩR ( cf fig.4.3.2) :
Pour un champ de deplacements u elastodynamique regulier.∫∂ΩR
tn(u)(x) · ug(ξ,x,a)dS −∮∂ΩR
tn(ug)(ξ,x,a) · u(x)dS
= κ(ξ)u(ξ) · a
κ(ξ) etant defini par les equations (4.16,4.17,4.18) pour Ω = ΩR, Γ = ∂ΩR.Soit en decomposant la frontiere et en effectuant un passage a la limitelorsque R tend vers l’infini :∫
Γtn(u)(x) · ug(ξ,x,a)dS −
∮Γtn(ug)(ξ,x,a) · u(x)dS = κ(ξ)u(ξ) · a
− limR→∞
(∫SR
tn(u)(x) · ug(ξ,x,a)dS −∫SR
tn(ug)(ξ,x,a) · u(x)dS)
Examinons cette derniere limite en faisant apparaitre les conditions de ra-diation :∫
SR
tn(u)(x) · ug(ξ,x,a)dS −∫SR
tn(ug)(ξ,x,a) · u(x)dS =∫SR
σnn(u)− iωcpun · ugndS +∫SR
ttn(u)− iωcsut · ugtdS −∫
SR
σnn(ug)− iΩcpugn · undS +
∫SR
tTn (ug)− iωcsugt · utdS +∫
SR
iωcpun · ugndS +∫SR
iωcsut · ugtdS∫
SR
iωcpugn · undS +
∫SR
iωcsugt · utdS
Les deux dernieres lignes s’annulent par symetrie, si de plus u et ug verifientles conditions de decroissance et de radiation, les termes dans les quatrespremieres integrales du second menbre sont en o(1/R2), la surface etanten O(R2), la limite de ces quatre integrales est nulle. Nous sommes ainsiparvenus a eliminer de l’equation toute influence de l’infini sur la solutionde notre probleme de diffraction. Nous obtenons finalement la generalisationde ?? pour un ouvert non borne de R3 de frontiere Γ reguliere et bornee.
Il est remarquable que les formulations du probleme interieur et duprobleme exterieur ne different que par le choix de la normale correspon-dante. Cela sera particulierement interessant pour la resolution numerique.

40
4.3.4 Application a des problemes aux limites
Considerons un obstacle borne de frontiere Γ plonge dans un espaceelastique homogene. Nous cherchons le champ d’ondes cree par une onde in-cidente determinee se diffractant sur cet obstacle. Le champ de deplacementsus dans le sol verifie les equations de l’elastodynamique dans le domaineexterieur Ωe, soit :
(λ + µ)grad div us + µ∆us + ρω2us = 0 dans Ωe
et des conditions aux limites sur la frontiere Γ.
f(tn(us),us) = 0 sur Γ
Ce champ us peut en fait se decomposer en champ incident ui et en champdiffracte ud :
us = ui + ud
Le champ incident ui est solution d’un probleme d’elastodynamique posesur l’espace homogene (par exemple un champ d’ondes planes) et est doncelastodynamique dans Ωe. Par linearite, le champ ud est donc aussi elastodynamique.
Les champs ui et us ne verifient a priori pas les conditions de decroissanceet de radiation de Sommerfeld, par contre, on imposera au champ ud de lesverifier. Nous pouvons donc lui appliquer l’equation integrale (4.18) sur ledomaine Ωe, et nous obtenons pour un point ξ sur Γ l’equation :∫
Γtn(ud)(x) · ug(ξ,x,a)dS −
∮Γtn(ug)(ξ,x,a) · ud(x)dS
= 1/2ud(ξ) · a
tn(ud) et ud etant a priori deux champs inconnus et independants definissur la frontiere, seules les conditions aux limites permettent de les couplersous la forme :
f(tn(ui) + tn(ud),ui + ud) = 0 sur Γ
Nous donnons maintenant quelques exemples typiques.
Cavites
Si l’obstacle est une cavite, les conditions aux limites deviennent :
tn(ud) = −tn(ui) sur Γ
Nous devons donc resoudre l’equation integrale avec second membre d’in-connu ud :∮
Γtn(ug)(ξ,x,a) · ud(x)dS + 1/2ud(ξ) · a = −
∫Γtn(ui) · ug(ξ,x,a)dS
avec a parcourant une base de R3.

41
Obstacles rigides fixes
Si l’obstacle est rigide et fixe, les conditions aux limites deviennent :
ud = −ui sur Γ
Nous devons donc resoudre l’equation integrale avec second membre d’in-connu tn(ud) :∫
Γtn(ud) · ug(ξ,x,a)dS = −
∮Γtn(ug)(ξ,x,a) · ui(x)dS − 1/2ui(ξ) · a
avec a parcourant une base de R3.
Obstacles rigides mobiles
Un obstacle rigide mobile peut se deplacer suivant ses six deplacementsde corps rigide, uobs etant le champ de deplacements du corp rigide, leprobleme possede trois inconnues uobs, ud et tn(ud). L’equilibre du corpsrigide constituent alors les conditions aux limites de type integrale∫
Γtn(us)dΓ = ω2
∫Ωi
ρuobsdΩi
Nous avons donc la premiere equation avec second membre :∫Γtn(ud)dΓ− ω2
∫Ωi
ρuobsdΩi = −∫
Γtn(ui)dΓ
La seconde exprimant la continuite des deplacements a l’interface :
uobs = ud + ui sur Γ (4.24)
et la derniere representant le domaine exterieur :∫Γtn(ud)(x) · ug(ξ,x,a)dS −
∮Γtn(ug)(ξ,x,a) · ud(x)dS = 1/2ud(ξ) · a
avec a parcourant une base de R3.
Obstacles elastiques
Soit Ωe le domaine exterieur et Ωi le domaine interieur de frontiere com-mune Γ, nous noterons ne la normale a la frontiere sortant du domaine Ωe
et ni la normale a la frontiere sortant du domaine Ωe. Nous avons pour unpoint x de Γ :
ne(x) = −ni(x)

42
Soit uobs le champ de deplacements dans l’obstacle, il est elastodynamiquedans le domaine Ωi , il verifie donc pour tout point ξ sur la frontiere et pourtout vecteur a parcourant une base de R3 :∫
Γtni(uobs)(x) · ug(ξ,x,a)dS −
∮Γtni(u
g)(ξ,x,a) · uobs(x)dS
= 1/2uobs(ξ) · a
Le champ diffracte dans le milieu exterieur verifie :∫Γtne(ud)(x) · ug(ξ,x,a)dS −
∮Γtne(u
g)(ξ,x,a) · ud(x)dS
= 1/2ud(ξ) · a
et les conditions de continuite a l’interface nous donnent :
tni(uobs)− tne(ud) = tne(ui) sur Γuobs − ud = ui sur Γ
Nous avons bien alors quatre inconnues ud, uobs, tne(ud) et tni(uobs) etquatre equations pour resoudre notre probleme sur la frontiere.
Representation du Champ en des points interieurs
Nous avons obtenu pour divers types de problemes aux limites une ex-pression des champs ud et tn(ud) sur la frontiere. Le champ ud en tout pointξ de Ω, est obtenu alors en fonction des champs sur la surface par :
ud(ξ) · a =∫
Γtn(ud)(x) · ug(ξ,x,a)dS −
∫Γtn(ug)(ξ,x,a) · ud(x)dS
4.4 Methode des elements finis de frontiere
Les problemes aux limites poses ci-dessus nous obligent a resoudre uneequation integrale posee sur la frontiere de la forme :
Pour tout point ξ sur la frontiere et pour tout vecteur ek parcourant unebase de R3 :∫
Γtn(u)(x) · ugk(ξ,x,a)dS −
∫Γtn(ugk)(ξ,x) · u(x)dS = 1/2u(ξ) · ek
(4.25)avec les conditions aux limites :
f(tn(u),u) = 0 sur Γ
tn(u) , u etant des inconnues independantes.La resolution de cette equation n’etant generalement pas possible ana-
lytiquement, nous allons utiliser une methode numerique pour la resoudre.

43
4.4.1 Discretisation
Dans un premier temps, nous approchons la frontiere Γ par ne elementsde frontiere, et nous supposerons les champs u et tn constants sur chaqueelement du maillage. Nous pouvons les decomposer suivant les fonctions debase de ces elements sous la forme :
u(x) =∑
i = 1, 3E = 1, Ne
uEiwEi(x) (4.26)
tn(x) =∑
i = 1, 3E = 1, Ne
tEiwEi(x) (4.27)
avec wEi(x) defini par :
wEi(x) = 0 si x 6∈ E
wEi(x) = ei si x ∈ E (4.28)
ei etant un vecteur de base de R3. Nous obtenons alors :∫Γ
∑Ei
tEiwEi(x) · ugk(ξ,x)dS −∮
Γtn(ugk)(ξ,x) ·
∑Ei
uEiwEi(x)dS
= 1/2∑Ei
uEiwEi(ξ) · ek (4.29)
Soit :∑Ei
tEi∫
ΓwEi(x) · ugk(ξ,x)dS − uEi
∮Γtn(ugk)(ξ,x) ·wEi(x)dS
= 1/2∑Ei
uEiwEi(ξ) · ek (4.30)
D’apres (4.28), les wEi(x) sont nuls sur tout element autre que l’element E,les integrales sur la frontiere se reduisent a des integrales sur l’element E,nous avons alors :∑
Ei
tEi∫EwEi(x) · ugk(ξ,x)dS − uEi
∮Etn(ugk)(ξ,x) ·wEi(x)dS
= 1/2∑Ei
uEiwEi(ξ) · ek (4.31)
Si nous choisissons le point ξ que nous noterons ξF au centre de gravite del’element F, nous obtenons en remplacant wEi par ei et en effectuant les

44
produits scalaires :∑Ei
tEi
∫Eugk(ξF ,x) · eidS − uEi(
∮Etn(ugk)(ξF ,x) · eidS
+1/2δEF δij) = 0 (4.32)
δij le symbole de Kronecker (δii = 1 et δij = 0 si i 6= j).
4.4.2 Assemblage
Si nous placons successivement le point ξ au centre de gravite de tous leselements nous obtenons un systeme d’equations lineaires de 3×Ne equationsque l’on peut exprimer sous forme matricielle :
[Ug]t = [Tg]u (4.33)
avec :
t = (t11, t12, ...tEi, ..., tNe3)T
UgEiFk =
∫Eugk(ξF ,xE) · eidS(xE)
TgEiFk = 1/2δEF δik +
∫Etn(E)(u
gk)(ξF ,xE) · eidSdS(xE) (4.34)
La formulation integrale (4.18) dont est issue ce systeme provenant d’unpassage a la limite, les integrales qui la composent ne sont definies qu’au sensde la valeur principale de Cauchy, il nous faut donc verifier que les integralesci-dessus exprimees ont bien un sens. Lorsque le point ξF n’appartient pas al’element sur lequel est effectuee l’integrale, les champs ugk et tn(ugk) sontreguliers et l’integrale est definie au sens usuel, et peut etre approchee parune formule de Gauss :
[Ug]EiFk =∑
q=1,Nq
wEqugk(ξF ,xEq) · ei
[Tg]EiFk =∑
q=1,Nq
wEqtn(ugk)i(ξF ,xEq) · ei (4.35)
les wEq etant les poids associes aux points de Gauss xEq. Ces points et poidsde Gauss sont obtenus de facon classique a partir des points de Gauss d’unelement de reference.
Par contre, lorsque le point ξF est le centre de gravite de l’elementd’integration, la fonction de Green ugk et les contraintes associees tn(ugk)comportent des singularites au point ξF . La singularite de ugk n’etant qu’enO(‖x−ξ‖−1) la premiere integrale n’est que faiblement singuliere et elle peutetre approchee par un schema d’integration de Gauss particulier. Quant a

45
l’integrale de tn(ugk), elle n’existe au sens de la valeur principale de Cau-chy et ne peut donc etre integree numeriquement qu’avec precautions. Nousenvisagerons au chapitre suivant un processus de regularisation de cetteintegrale. Il est toutefois interessant de noter que pour un vecteur n dedirection constante, tn(ugk) possede une symetrie centrale par rapport aupoint d’application de la force, nous donnant ainsi des resultats interessantspour des elements plans.
4.4.3 Resolution
Une fois le systeme lineaire (4.33) assemble, nous lui adjoignons les condi-tions aux limites imposees sur la frontiere sous la forme de 3xNe equationssupplementaires qui nous permettent ainsi de resoudre le systeme global de6xNe equations a 6xNe inconnues. Notons, que contrairement au cas clas-sique des elements finis, les matrices Ug et Tg sont des matrices pleines,complexes, non-symetriques.Le fait de poser le probleme sur la frontierenous a permis de reduire le nombre de degres de liberte par rapport a unmaillages elements finis ou differences finis ( seule la surface et non le volumeest maillee ), par contre, cette formulation fait interagir tous les degres deliberte entre eux, et les matrices obtenues sont pleines. Ces matrices sontgeneralement bien conditionnees, et peuvent etre inversees par une methodede Gauss. Dans le cas particulier d’un probleme en deplacements imposes,nous avons en prenant pour uo les valeurs moyennes de la ieme composantedu champ impose uo sur l’element E :
u = uo [uo]Ei =∫Euoi(xE)dS(xE))/(
∫E
dS(xE))
t = [Ug]−1[Tg]uo (4.36)
TEi etant alors le champ des contraintes resultantes sur la frontiere.
4.5 Equations integrales regularisees
Nous avons vu que la methode developpee precedemment conduit a descalculs d’integrales definies au sens de la valeur principale de Cauchy qu’ilest difficile d’approximer par une methode d’integration classique. En parti-culier, dans le cas de la formulation discrete. Ces integrales intervenant dansl’expression des termes dits d’auto-influence situes sur la diagonale de la ma-trice T g, il est important de les evaluer de facon precise afin d’obtenir desresultats corrects apres inversion du systeme. Nous proposons de resorbercette singularite par une methode de regularisation originellement proposeedans [12, 59] qui, appliquee a l’equation integrale donne la formulation sui-

46
vante :∫Γtn(u)(x) · ugk(ξ,x)dS −
∫Γtn(ugk − ugko)(ξ,x) · u(x)dS
+∫
Γtn(ugko)(ξ,x) · u(x)− u(ξ)dS = κΩu(ξ) · ek (4.37)
et appliquee a la methode des elements de frontiere fournit une methode decacul des termes diagonaux :
TgF iFk = −κΩ +
∫Ftn(ugk)− tn(ugko)(ξF ,xF ) · eidS(xF )
+∑E 6=F
∫Etn(ugko)(ξF ,xE) · eidS(xE) (4.38)
avec κΩ = 0 si Ω est borne et κΩ = 0 si Ω est non-borne.
4.5.1 Domaines bornes
Placons nous tout d’abord sur un domaine Ω ouvert borne de R3 defrontiere Γ. Nous avons alors pour tout champ u verifiant l’equation deNavier stationnaire :
(λ + µ)grad div u+ µ∆u = −ρω2u (4.39)
l’equation integrale (4.18) pour tout point ξ de la frontiere Γ :∫Γtn(u)(x) · ugk(ξ,x, ω)dS −
∮Γtn(ugk)(ξ,x, ω) · u(x)dS
= 1/2u(ξ) · ek (4.40)
Si nous choisissons le cas particulier de l’equation statique (ω = 0), nousobtenons pour champ uo verifiant les equations de l’elastostatique :
(λ + µ)grad div uo + µ∆uo = 0 (4.41)
l’equation integrale statique :∫Γtn(uo)(x) · ugko(ξ,x)dS −
∫Γtn(ugko)(ξ,x) · uo(x)dS
= 1/2uo(ξ) · ek (4.42)
Le champ de deplacements constant sur tout le domaine Ω est un champelastostatique ayant sur toute facette un vecteur-contraintes nul, donc enprenantuo = b, nous avons :∫
Γtn(ugko)(ξ,x) · bdS = −1/2b · ek (4.43)

47
Cette formule exprimee sur le probleme discretise en choisissant b parcourantune base orthonormee de R3 nous donne :∑
E
∫Etn(ugko)(ξF ,xE) · eidS = −1/2δik (4.44)
Dans le cas de l’equation integrale statique, nous pouvons donc evaluer defacon precise les termes d’autoinfluence a partir des termes reguliers de lamatrice T go par :
T goF iFk =
∑E 6=F
∫Etn(ugko)i(ξF · xE)dS (4.45)
Ce resultat, valable dans le cas des equations integrales en elastostatiquene peut pas etre etendu au cas de l’elastodynamique, car un champ dedeplacements constant n’est plus solution des equations de l’elastodynamique.Toutefois, il est possible de montrer que la fonction de Green ug ainsi queles contraintes associees tn(ug) ont la meme singularite en statique et endynamique c’est a dire :
lim‖ξ−x‖→0
‖tn(ug)− tn(ugo)‖ = 0(‖ξ − x‖−1) (4.46)
En effet, a faible distance du point d’application de la force ponctuelle, lesdeplacements statique et dynamique sont similaires car comme nous l’avonsvu precedemment, l’influence des forces d’inertie est negligeable devant celuides forces elastiques sur une boule de rayon arbitrairement petit entourantle point d’application de la force. Si nous soustrayons l’equation integralestatique (4.42) a l’equation integrale dynamique (4.18), nous obtenons enprenant uo = u(ξ), l’equation integrale regularisee :∫
Γtn(u)(x) · ugk(ξ,x)dS −
∫Γtn(ugk − ugko)(ξ,x) · u(x)dS (4.47)
+∮
Γtn(ugko)(ξ,x) · u(x)− u(ξ)dS = 0
Les deux premieres integrales sont maintenant faiblement singulieres d’apres(4.46) et (4.7), ainsi que la troisieme, car si tn(ugko)(ξ,x) est en O(‖ξ−x‖−2)(4.8), u(x)−u(ξ) est en O(‖ξ−x‖), u est suppose derivable par morceaux.Cette nouvelle formulation de l’equation integrale nous permet de ne plusfaire intervenir que des integrales au sens usuel. Nous obtenons alors pourla forme discretisee les termes d’auto-influence :
TgF iFk =
∫Ftn(ugk)− tn(ugko)(ξF ,xF ) · eidS(xF )
+∑E 6=F
∫Etn(ugko)(ξF ,xE) · eidS(xE) (4.48)

48
4.5.2 Domaines non bornes
Le raisonnement effectue ci-dessus ne peut pas etre d’emblee etendu aucas des domaines non bornes. En effet, nous avons impose dans ce cas a lasolution de verifier des conditions de decroissance et de radiation, et dansle cas de l’equation statique, un champ de deplacements constant ne verifiepas ces conditions.
Soit Ωe le domaine ouvert exterieur non borne de frontiere Γe oriente parla normale exterieure a Ωe, ne, et Ωi le domaine ouvert interieur borne defrontiere Γi oriente par la normale exterieure a Ωi, ni. La fonction de Greenetant difinie sur R3 tout entier nous avons donc continuite des contraintesentre le domaine interieur et le domaine exterieur, soit pour tout couple depoints (ξ,x) de la frontiere Γ :
tne(ugko)(ξ,x) = −tni(ugko)(ξ,x) (4.49)
Si nous integrons sur la frontiere pour tout champ constant b, nous obte-nons :∫
Γtne(u
gko)(ξ,x) · bdS = −∫
Γtni(u
gko)(ξ,x) · bdS = 1/2bk (4.50)
Nous exprimons immediatement l’equation integrale exterieure regularisee :∫Γtn(u)(x) · ugk(ξ,x)dS −
∫Γtn(ugk − ugko)(ξ,x) · u(x)dS
+∫
Γtn(ugko)(ξ,x) · u(x)− u(ξ)dS = u(ξ) · ek (4.51)
Pour le probleme discretise, les termes d’auto-influence deviennent alors :
T gF iFk = −1 +
∫Ftn(ugk)− tn(ugko)(ξF ,xF ) · eidS(xF )
+∑E 6=F
∫Etn(ugko)(ξF ,xE) · eidS(xE) (4.52)
Nous avons ainsi resolu dans le cas des domaines bornes et non bornes leprobleme de singularite, et obtenu une formulation regularisee de l’equationintegrale.
4.6 Conclusion
Dans ce chapitre, nous avons presente une methode de resolution d’unprobleme de diffraction d’ondes sur des obstacles bornes quelconque a l’aided’une methode d’equation integrale directe derivee du theoreme de reciprocitede Maxwell-Betti. Dans ces derivations nous avons insiste sur le fait que cette

49
equation provient dun passage a la limite conduisant a la notion d’integralesau sens de la valeur principale de Cauchy.
Nous avons ensuite montre dans quel mesure cette eauation integralepeut etre utilisee pour resoudre des problemes aux limites, et nous avonspropose une methode de resolution numerique de cette equation fondee surune methode de collocation.
Enfin, afin de s’affranchir des difficultes numeriques liees a l’integrationen valeur principale de Cauchy, nous avons proposes une methode de regularisationfondee sur l’utilisation de solution statiques particuliere, les mouvements decorps rigide.
Remarquons en conclusion que les methodes proposees ici ne sont passpecifiques a l’elastodynamique et qu’elles sont applicables pour une largegamme de problemes aux limites en particulier poses sur des domaines ho-mogenes non-bornes.

Annexe A
Relation entre l’energiesismique et la surface desfailles
Auteur : Jacques Betbeder-MatibetL’objet de cette communication est de montrer au moyen d’un modele
tres simple de rebond elatique, que l’adoption d’une loi donnant l’energiesismique en fonction de la magnitude (Gutemberg-Richter 1956) entraOnepour l’expression de la surface de la faille en fonction de la magnitude uneloi identique a celle proposee en 1994 par Wells et Coppersmith.
A.1 Notations et hypotheses
A.1.1 Donnees caracterisant le materiau
– masse volumique ρ ;– vitesse des ondes de cisaillement c,– module de cisaillement :
µ = ρc2 (A.1)
– facteur de qualite pour les ondes de cisaillement Q.Pour les applications numeriques on prendra les valeurs suivantes :
ρ = 2700kg/m3, c = 1/3× 104m/s, µ = 31010N/m2, Q = 600(A.2)
La valeur de Q est tiree du modele PREM (Preliminary Reference EarthModel, Dziewonsky et Anderson 1981).
Fig. A.1 – Modele du rebond elastique
50

51
A.1.2 Donnees caracterisant le seisme
– Longueur du bloc subissant la rupture L ;– hauteur du bloc subissant la rupture H,– largeur du bloc subissant la rupture B,– deplacement relatif entre les faces opposees du bloc depuis l’etat initial
non deforme U .– amplitude du glissement sur le plan de faille ∆u.– profondeur du foyer h,– contrainte de cisaillement ultime avant rupture σu,– contrainte de cisaillement apres rupture σf ,– chute de contrainte
∆σ = σu − σf (A.3)
– moment sismiqueMo = µLH∆u (A.4)
– magnitude de moment Mw.La relation entre Mo et Mw sera prise sous la forme :
Mo(Nm) = 101,5Mw+9 ou Mw =23
log10 Mo − 6 (A.5)
A.1.3 Hypotheses
– Au moment de la rupture la contrainte passe instantanement de lavaleur σu a la valeur finale σf ,
– Le comportement du materiau est elastique.La figure A.1 peut laisser croire que le modele ne s’applique qu’aux decrochements(plan de faille vertical). En realite, on peut aussi bien considerer que le plande faille a un pendage oblique (failles normales ou inverses) ; la longueur dela rupture eventuellement visible en surface sera alors H.
A.2 Rayon equivalent de la source sismique
Dans l’etat ultime avant rupture la deformation accumulee depuis l’etatinitial non deforme est egale a U/B ; on a donc pour la contrainte de cisaille-ment σu :
σu = µU
B(A.6)
Dans l’etat final apres rupture la deformation dans chacun des deux demi-blocs est egale a 1/2(U −∆u)/(B/2), d’ou la contrainte finale σf :
σf = µU −∆u
B(A.7)

52
En soustrayant (A.6) et (A.7) on trouve pour la chute de contrainte :
∆σ = µ∆u
B(A.8)
En reportant dans la definition (A.4) du moment sismique on obtient larelation suivante :
Mo = LHB∆σ
C’est a dire que le volume LHB du bloc subisant la rupture a pour expres-sion :
LHB =Mo
∆σ(A.9)
Quand on s’interessera a l’attenuation des ondes emises par la source sis-mique, on sera amene a assimiler ce volume a celui d’une sphere de rayonRo qui doit etre tel que :
Ro = 0, 620(
Mo
∆σ
) 13
(A.10)
Les dimensions du bloc peuvent etre rapportees a Ro en ntroduisant lesfacteurs de forme ΦL, ΦH , ΦB definis par :
ΦL =L
Ro; ΦH =
H
Ro; ΦB
B
Ro(A.11)
et dont le produit doit etre egal a 4π/3
A.3 Calcul de l’energie sismique par le bilan d’energie
Le bilan d’energie entre l’etat ultime et l’etat final s’ecrit :
Eu = Ef + Ed + Es + Eg (A.12)
dans lequel :– Eu = LHB σ2
u2µ est l’energie de deformation elastique avant rupture,
– Ef = LHBσ2f
2µ est l’energie de deformation elastique apres rupture,– Ed = LHσf∆u est l’energie dissipee par frottement sur le plan de
faille,– Es est l’energie sismique liberee sous forme d’ondes sismiques,– Eg est l’energie gravitaire resultant du mouvement des demi-blocs qui
est nulle en raison de l’anti-symetrie de ce mouvement (si l’un desdemi-blocs monte, l’autre descend de la meme quantite).
On a donc en reportant les expressions de Eu, Ef , et Ed dans (A.12) et enresolvant pas rapport a Es :
Es =LHB
2µ(σ2u − σ2
f −2µ
Bσf∆u)

53
C’est a dire d’apres (A.8) :
Es =LHB
2µ∆σ2
On a donc compte tenu de (A.9) :
Es =Mo∆σ
2µ(A.13)
A.4 Calcul directe de l’energie sismique
La formule (A.13) permet de calculer l’energie cinetique volumique dansle bloc subissant la rupture soit 1/2ρv2
o , ou vo est la vitesse particulaire ; ondoit en effet avoir :
Es =Mo∆σ
2µ= LHB1/2ρv2
o
On a donc pour v2o d’apres (A.9) :
v2o =
∆σ2
ρ2c2
d’ou pour vo :
vo =∆σ
ρc(A.14)
La duree to de la rupture est telle que son produit par cette vitesse doit etreegale au deplacement ∆u/2 de chacun des deux demi-blocs sur le plan defaille :
voto =12∆u
Soit pour to, compte tenu de (A.9) et de (A.14) :
to =12
B
c(A.15)
Il ne faut pas confondre cette duree to avec le temps de propagation du frontde rupture sur le plan de faille qui intervient dans des modeles plus elaboresde la source sismique. Dans le modele considere ici la rupture se produitinstantanement sur la totalite du plan de faille. Le temps to represente letemps mis par chacun de deux demi-blocs pour atteindre leur position finale,ou ils sont decales de la quantite ∆u.
Ce mouvement des demi-blocs produit l’emission d’ondes de cisaillementpendant la duree to A une certaine distance de la source, on peut admettreque ces ondes sont spheriques.

54
Fig. A.2 – Propagation a fronts d’ondes spheriques
La figure A.2 montre les fronts d’ondes de tete et de queue de rayonsrespectifs R2 et R1. Compte tenu de la propagation a la vitesse c et de laduree to de l’emission des ondes on a la relation suivante :
R2 −R1 = cto
C’est-a-dire, d’apres (A.15) :
R2 −R1 =B
2(A.16)
La vitesse particulaire vaut vo, donnee par (A.14), au sein de la source derayon Ro et decroit en raison inverse du rayon R des fronts d’ondes comprisentre R1 et R2, c’est-a-dire :
v(R) =∆σ
ρc
Ro
R(A.17)
L’energie sismique Es peut se calculer directement en integrant l’energiecinetique volumique 1/3ρv2(R) dans le volume compris entre les fronts d’ondesde tete et de queue ; on a donc, en utilisant la relation (A.17) :
Es =∫ R2
R1
12ρ
(∆σ
ρc
)2 R2o
R24πR2dR = 2π
∆σ2
µR2o
∫ R2
R1
dR = 2π∆σ2
µR2o(R2−R1)
Soit encore, d’apres (A.16) :
Es = π∆σ2
µR2oB
ou en introduisant le facteur de forme ΦB defini par (A.11) :
Es = π∆σ2
µR3oΦB
ce qui peut encore s’ecrire :
Es =43πR3
o
∆σ2
µ
34ΦB
Le facteur 43πR3
o n’est autre que le volume LHB du bloc ; on a donc, d’apres(A.9) :
Es =34ΦB
Mo∆σ
2µ

55
Comme on doit retrouver l’expression (A.13) de Es, il faut que ΦB soit egala 2/3, ce qui entraine puisque le produit ΦLΦBΦH est egal a 4π/3 :
ΦLΦH = 2π
On a donc, pour la surface S − LH du plan de faille :
S = LH = ΦLΦHR2o = 2πR2
o (A.18)
et pour le glissement ∆u, d’apres (A.8) :
∆u =B∆σ
µ= ΦBRo
∆σ
µ=
23
∆σ
µRo (A.19)
En utilisant l’expression (A.10) de Ro, on peut re-ecrire (A.18) et (A.19)comme suit :
S = 2π
(34π
)2/3(Mo
∆σ
)2/3
= 2, 418(
Mo
∆σ
)2/3
∆u =23
(34π
)1/3 ∆σ2/3M1/3o
µ= 0, 414
∆σ2/3M1/3o
µ
ou encore en utilisant (A.5) :
S(m2) = 2, 418(∆σ(N/m2)
)−2/3 × 10MW+6 (A.20)
∆u = 0, 414
(∆σ(N/m2)
)2/3µ(N/m2)
× 10MW /2+3 (A.21)
A.5 Comparaison avec les lois empiriques de Gutenberg-Richter sur l’energie et de Wells-Coppersmithsur la geometrie des failles
La loi de Gutenberg-Richter sur l’energie sismique (1956) s’ecrit :
log10 Es(Nm) = 1, 5Ms + 4, 80 (A.22)
En assimilant la magnitude Ms d’apres les ondes de surface a la magnitudede moment MW (qui n’avait pas encore ete introduite en 1956, date depublication de la loi) et en expriment Es par la relation (A.13), on doit doncavoir :
log10 Mo(Nm) + log10
∆σ
2µ= 1, 5Ms + 4, 80
c’est a dire en utilisant (A.5) :
log10
∆σ
2µ= 4, 80− 9 = −4, 20

56
soit pour ∆σ en prenant la valeur standard µ = 3× 1010N/m2 :
∆σ(N/m2) = 3, 79× 106N/m2 (A.23)
Cette valeur est voisine de la moyenne geometrique des bornes generalementadmises pour ∆σ (1 et 10 MPa). Elle est beaucoup plus petite que la pressionresultant du poids des terrains qui vaut, a la profondeur h :
p = ρgh (A.24)
g etant l’acceleration de la pesanteur.Pour une profondeur de foyer typique de h = 15km, on trouve p =
3, 97 × 108N/m2 soit une valeur 105 fois plus grande que ∆σ donnee par(A.23).
Wells et Coppersmith ont donne en 1994 plusieurs lois reliant MW adifferentes caracteristiques geometriques des failles (surface, longueur, glis-sement moyen et maximal sur le plan de faille). La relation MW −S (surfacede la faille) s’ecrit :
MW = 4, 07 + 0, 98 log10 S(km2) (A.25)
Or on a trouve ci-avant la forme (A.20) pour cette relation qui s’ecrit, enpassant des m2 aux km2 pour mesurer S :
S(km2) = 2, 418(∆σ(N/m2)
)−2/3 × 10MW
En prenant les logarithmes decimaux et en utilisant la valeur (A.23) pour∆σ, on obtient en resolvant en MW :
MW = 4, 00 + log10 S(km2) (A.26)
soit une relation quasiment identique a la loi de Wells-Coppersmith. On peutaussi ecrire (A.26) en resolvant par rapport a S :
S(km2) = ×10MW−4 (A.27)
Wells et Coppersmith ont egalement donne la relation suivante entre le glis-sement moyen ∆u et la magnitude MW :
log10 ∆u(m) = −4, 80 + 0, 69MW (A.28)
En prenant le logarithme decimal des deux membres de la formule (A.21)on trouve :
log10 ∆u(m) = log10(0, 414)+2/3 log10 ∆σ(N/m2)−log10 µ(N/m2)+0, 5MW+3
Avec les valeurs (A.23) pour ∆σ et (A.2) pour µ, on obtient la loi :
log10 ∆u(m) = −3, 47 + 0, 5MW (A.29)

57
Comparee a (A.28) cette loi (A.29) donne le meme resultat ∆u = 1, 07mpour MW = 7, mais s’en ecarte pour d’autres valeurs en raison de ladifference entre les termes de pente (0, 50 au lieu de 0, 69), produisant des∆u plus grands que ceux calcules par (A.28) si MW < 7 et des ∆u plusfaibles si MW > 7.
En realite les relations MW −S et ∆u−MW ne sont pas independantes,en ce sens que si l’on se donne l’une des deux., l’autre est necessairementdeterminee par la relation de definition du moment sismique :
Mo(Nm) = 101,5MW+9 = µS∆u
qui s’ecrit encore en passant aux logarithmes decimaux :
1, 5MW + 9 = log10 µ(N/m2) + log10 S(km2) + log10 ∆u(m)
c’est-a-dire avec µ = 3× 1010N/m2 :
1, 5MW = 7, 48 + log10 S(km2) + log10 ∆u(m) (A.30)
Si donc on a trouve pour la relation MW − S l’expression suivante :
MW = a + b log10 S(km2) (A.31)
On a en reportant log10 S(km2) = (MW − a)/b dans (A.30) et en resolvantpar rapport a log10 ∆u(m) :
log10 ∆u(m) =a
b− 7, 48 + (1, 5− 1
b)MW
Avec les valeurs a = 4, 07, b = 0, 98 de la loi (A.25), on devrait donc avoirpour log10 ∆u(m) :
log10 ∆u(m) = −3, 33 + 0, 48MW (A.32)
ce qui est tres voisin de (A.29).La loi (A.28) de Wells-Coppersmith est moins bonne que leur loi (A.25),
ce qui decoule de l’examen de leur ecart-type qui vaut 0, 36 pour (A.28) et0, 24 pour (A.25).

Annexe B
Ondes elastiques dans unespace homogene
B.1 Introduction
L’etude de l’equation des ondes en dimension 1, nous a permis de mettreen evidence la structure des solutions de ce type d’equation, ainsi que quelquesmethodes de resolution pouvant etre employees. Nous allons maintenant pas-ser a un espace de dimension superieure, et mettre en evidence des proprietesnouvelles qui n’apparaissaient pas en 1D. Dans R3, l’equation de Navierprend une forme plus complexe que l’equation des ondes, du fait des cou-plages crees par les cisaillements existant dans un materiau elastique. Unefois cette equation decouplee, nous mettons en evidence des modes libres depropagation sous la forme d’ondes de deux types : les ondes de compressionet les ondes de cisaillement, se propageant chacune a des vitesses differentes.Nous nous proposons ensuite de determiner le champ de deplacements creedans l’espace par une densite quelconque de forces volumiques. Nous sommesalors conduit a resoudre le probleme annexe du champ de deplacement creepar une force ponctuelle. Une fois effectuees des transformations de Fourierpar rapport aux variables d’espace et de temps, ce champ, appele fonctionde Green, apparaıt comme une superposition d’ondes planes elementaires.Nous obtenons alors par transformations inverses l’expression analytiquestationnaire et transitoire, que nous utilisons ensuite pour la resolution duprobleme general.
B.2 Equations generales
Soit un espace physique isomorphe a R3 et x un point de cet espace,u(x, t) le vecteur des deplacements par rapport a un etat de reference, etσ(x, t) le tenseur des contraintes au point x observes au temps t. La conser-vation de la quantite de mouvement a l’instant t appliquee a l’element de
58

59
volume dV (x) de surface dS(x) et de masse volumique ρ(x) entourant lepoint x donne :∫
σ(x, t) · ndS +∫f(x, t)dV =
∫∂ttu(x, t)dV (B.1)
Dans l’hypothese des petites perturbations autour d’une position d’equilibre,u et ∂tu etant des infiniment petits d’ordre 1, l’equation (B.1) prend la formede l’equation de Navier suivante :
div σ(x, t) + f(x, t) = ρ(x)∂ttu(x, t) (B.2)
Soit ε, le tenseur des deformations defini par :
ε = 1/2(Grad u+ (Grad u)T ) (B.3)
()T representant le transpose d’un tenseur1 et Grad le gradient d’un champde vecteurs 2. Le comportement du materiau etant suppose elastique, le ten-seur des contraintes σ s’exprime donc en fonction du tenseur des deformationsε sous la forme :
σ = C(x) : ε (B.4)
: designant la contraction de deux tenseurs3. Par symetrie de C et de ε, eten remplacant dans (B.2) σ par (B.4) nous obtenons :
div (C : Grad u) + f = ρ∂ttu (B.5)
Si le materiau est suppose homogene4 et isotrope, le tenseur C(x) ne dependplus que des deux coefficients de Lame λ et µ et la relation (B.4) s’exprimeen tout point x et a tout instant t :
σ = λdiv uId + 2µ(x)ε(x, t) (B.6)
Id etant l’identite. L’equation (B.2) devient alors :
(λ + µ)grad div u+ µ ∆u+ f = ρ∂ttu (B.7)
ou encore en utilisant la relation ∆u = grad div u− rot rot u :
(λ + 2µ)grad div u− µ rot rot u+ f = ρ∂ttu (B.8)
1(AT )ij = Aji2(Grad u)ij = ∂iuj3σij =
Pkl Cijklεkl.
4ou localement homogene

60
B.3 Ondes de compression et de cisaillement
Avant de resoudre l’equation (B.7) pour une repartition quelconque deforces f(x, t), nous allons chercher des solutions non nulles de cette equationpour f(x, t) = 0. Les solutions non nulles de cette equation homogene,si elles existent, sont les modes libres du systeme, elements du noyau del’operateur (∆∗ − ρ∂tt) , avec :
∆∗ = (λ + µ)grad div + µ∆
Nous nous limiterons dans cette etude a un espace homogene soit :
(λ + µ)grad div u(x, t) + µ ∆u(x, t) = ρ∂ttu(x, t) (B.9)
en n’acceptant que des solutions a croissance lente a l’infini5. Cette condi-tion permet d’eliminer toutes les solutions croissant exponentiellement al’infini non-admissibles physiquement tout en autorisant de definir au sensdes distributions la transformee de Fourier de ces solutions.
B.3.1 Decomposition de Helmholtz
La decomposition de Helmholtz est un outil tres agreable pour simplifierl’equation de Navier et remplacer l’inconnue u par deux potentiels Φ et Ψqui verifieront des equations decouplees plus simples. On pose donc :
u = grad Φ + rot Ψ avec div Ψ = 0 (B.10)
Moyennant quelques hypotheses sur le comportement a l’infini, ces deuxpotentiels sont determines de facon unique comme solutions des equationsde Laplace suivantes :
∆Φ = div u , ∆Ψ = −rot u (B.11)
Cette decomposition introduite dans l’equation de Navier donne apres quelquesmanipulations :
grad ((λ + 2µ)∆Φ− ρ∂ttΦ) + rot (µ∆Ψ− ρ∂ttΨ) = 0 (B.12)
et du fait de l’unicite de la decomposition de Helmholtz nous obtenons :
(λ + 2µ)∆Φ− ρ∂ttΦ = 0 (B.13)µ∆Ψ− ρ∂ttΨ = 0 avec div Ψ = 0 (B.14)
Ces deux equations apparaissent comme la forme scalaire et la forme vecto-rielle de l’equation des ondes tridimensionnelle :
c2∆F − ∂ttF = 0 (B.15)
Nous sommes donc par la suite ramenes a l’etude de cette equation.5Le cadre mathematique ad hoc pour cette etude est l’espace des distributions
temperees.

61
B.3.2 Les ondes planes
En utilisant la methode classique de separation des variables -ou encorece qui est equivalent en utilisant une transformation de Fourier-, une solutiongenerique de l’equation des ondes (B.15) est une onde plane monochroma-tique de la forme :
F (x, t) = Foei(k·x−ωt) avec ‖k‖ =
ω
c(B.16)
En posant k = ωξ , et en prenant pour Fo la transformee de Fourier d’unefonction quelconque f , la transformation inverse par rapport a la frequencede l’expression precedente prend alors la forme generale suivante :
F±(x, t) = f(ξ.x± ct) avec ‖ξ‖ = 1 (B.17)
f etant une fonction de R dans R que nous choisirons de carre sommable,sa derivee etant egalement de carre sommable6. Ces solutions sont appeleesondes planes car les points x de l’espace appartenant a un plan P (ξ, xo)passant par xo et de normale ξ7 verifient quel que soit xo :
F±(x, t) = F±(xo, t) (B.18)
et ont donc meme phase. Ces plans de nomale ξ sont appeles les frontsd’onde. On verifie aisement que ce front d’onde se propage a la vitesse cdans la direction ±ξ , car :
F±(x− ct′ξ, t± t′) = F (xo, t) (B.19)
Nous avons donc obtenu un type de solutions particulieres non nulles del’equation des ondes que nous pouvons maintenant reporter dans l’expressiondes potentiels.
B.3.3 Ondes planes elastiques
Les potentiels Φ et Ψ elastiques introduits en (B.10) verifiant des equationsdes ondes, ils peuvent en particulier prendre la forme d’ondes planes mono-chromatiques de vitesses respectives cp et cs, soit :
Φ = Φoeiω( ξ·x
cp±t) avec cp =
√λ + 2µ
ρ(B.20)
Ψ = Ψoeiω( ξ·x
cs±t) avec cs =
õ
ρet Ψo · ξ = 0 (B.21)
Les deplacements associes sont alors en notant avec kα = ξω/cα :
up = grad Φ = ikpΦ (B.22)us = rot Ψ = iks ∧Ψ (B.23)
6L’espace de Sobolev H1(R)7L’equation de ce plan est ξ · (x− xo) = 0.

62
dx=cpdtcp : vitesse de propagation
u k : vecteur d’onde
t(u) : contraintes sur le front d’onde
Front d’onde
Fig. B.1 – Polarisation des ondes de compression
Ondes de compression Les ondes derivant du potentiel Φ sont appeleesondes de compression. Le vecteur-deplacement up est parallele au vecteurd’onde kp, et la vitesse de propagation de ces ondes est cp. Le vecteur-contraintes t(up) s’exercant sur une facette de normale ξ , associe a cetteonde est :
t(up) = −ρω2Φξ = iρωcpup (B.24)
Il est donc aussi parallele a la direction de propagation ξ , d’ou le termed’onde de compression ou onde longitudinale. Il faut noter que le moduleintervenant dans le calcul de la vitesse n’est pas le module d’Young E, maisle module oedometrique λ+2µ. Ceci est en concordance avec la cinematiquede l’onde puisque la deformation tangentiellement au front d’onde est nulle.
Ondes de cisaillement Les ondes derivant du potentiel Ψ sont appeleesondes de cisaillement. Le vecteur-deplacement est perpendiculaire a la di-rection de propagation, et la vitesse est cs. Le vecteur-contrainte t(us)s’exercant sur une facette de normale ξ, associe a cette onde :
t(us) = −ρω2(ξ ∧Ψ) = iωρcsus (B.25)
est lui aussi perpendiculaire a la direction de propagation, d’ou le termed’onde de cisaillement ou onde transversale. De plus, λ et µ etant des reelspositifs, nous avons toujours :
cp > cs (B.26)
les ondes de compression se propagent plus vite que les ondes de cisaille-ment et ont donc pour une meme source generant ces deux ondes, un tempsd’arrivee inferieur, d’ou une troisieme terminologie d’ondes primaires (com-pression) et ondes secondaires (cisaillement ).

63
dx=csdtcs : vitesse de propagation
u k : vecteur d’onde
t(u) : contraintes sur le front d’onde
Front d’onde
Fig. B.2 – Polarisation des ondes de cisaillement
B.3.4 Impedance d’une onde plane et conditions de radiationde Sommerfeld
Les relations (B.24, B.25) nous permettent d’etablir des relations d’impedanceclassique pour les ondes planes non necessairement harmoniques sous laforme :
tn(uα) = ρcα∂tuα (B.27)
On notera l’analogie entre cette expression et les relations de compatibilite lelong des caracteristiques obtenues au chapitre ??, et l’on remarquera que cesrelations restent valables localement pour des ondes non planes a conditionque le front d’onde ait une courbure faible, c’est a dire que localement l’onde se comporte comme une onde plane.
Ces relations d’impedance s’averent essentielles pour l’analyse de l’equationde Navier a la fois d’un point du vue mathematique et numerique. Numeriquementelles sont couramment utilisees pour fixer une condition aux limites a lafrontiere d’un domaine afin d’assurer la non reflexion des ondes sur cettefrontiere. Mathematiquement, elles sont utilisees pour construire les condi-tions de radiation de Sommerfeld suivantes :
limR←∞
∫‖x‖=R
(σnn − iωρcpu · n)2dS = 0 (B.28)
limR←∞
∫‖x‖=R
‖ttn − iωρcsut‖2dS = 0 (B.29)
avec n = x/R et t designant les composantes perpendiculaires a n. Cette re-lation signifie que l’energie associee aux ondes qui a l’infini ne se comportentpas localement comme des ondes planes de compression ou de cisaillementse propageant dans la direction radiale est negligeable.
Cette relation est essentielle pour assurer l’unicite des solutions station-naires de l’equation de Navier. En effet, comme nous l’avons montre danscette section, cette equation, sans terme source, admet des solutions non

64
triviales ; en particulier les ondes planes. A toute solution particuliere peutdonc etre a priori superposee une onde plane quelconque. Notons toutefoisque, si le champ est au repos avant un certain temps to i.e. des conditionsinitiales, on montre aisement que ces ondes planes doivent etre d’amplitudenulle. Par contre cette propriete est perdue si l’on s’interessent aux solutionsstationnaires. On montre alors que les conditions de Sommerfeld sont desconditions suffisantes pour assurer l’unicite de la solution8.
B.4 Champ cree par des forces de volume
Afin de resoudre l’equation de Navier (B.7) pour une densite de forcequelconque f(x, t), nous allons resoudre le probleme pour une force unitaireappliquee au point y au temps t′ dans la direction a. Par superposition ilsera alors possible de resoudre ce probleme pour n’importe quelle densite deforce. ug(y, t′, a;x, t) le champ de deplacement correspondant appele aussifonction de Green verifie :
(λ + µ)grad div ug + µ∆ug + δyδt′a = ρ∂ttug (B.30)
δy etant la mesure de Dirac au point y9. Du fait de la linearite des equationstraitees ici, la solution generale de (B.7) sera alors donnee par :
u(x, t) =∑k
∫R4
ug(y, t′, ek;x, t)fk(y, t′)dydt′ (B.31)
fk etant la kieme composante de f dans (e1, e2, e3), une base orthonormeede R3.
B.4.1 Calcul de la fonction de green de l’espace homogene
Du fait de l’homogeneıte de l’espace et du temps, il est aise de remarquerque :
ug(y, t′,a;x, t) = ug(0, 0,a;x− y, t− t′) (B.32)
Ainsi, dans la suite nous supposerons la force placee a l’origine et appliqueea l’instant 0. Les parametres y, t′ et a seront donc omis. La fonction deGreen est donc solution de :
(λ + µ)grad div ug + µ∆ug + δ(x)δ(t)a = ρ∂2ttu
g (B.33)
avec comme conditions initiales ug(x, t,a) = ∂tug(x, t,a) = 0 pour t < 0 La
resolution de cette equation sera effectuee en utilisant des transformationsde Fourier (??), tant par rapport au temps que par rapport aux variablesd’espace.
8En particulier, on montre qu’une onde plane ne verifie pas la condition de Sommerfeld,car elle ne verifie exactement la condition d’impedance que dans sa direction de propaga-tion, et non dans toutes les directions comme le reclame la condition de Sommerfeld
9δy est une distribution definie pour toute fonction continue ϕ par : (δy, ϕ) = ϕ(y)

65
Transformation par rapport au temps Si nous appliquons une trans-formation de Fourier par rapport au temps a l’equation (B.30), nous obte-nons :
(λ + µ)grad div ug(x, ω) + µ∆ug(x, ω) + δ(x)a = −ρω2ug(x, ω) (B.34)
Pour ω fixe, nous allons resoudre (B.34) pour des fonctions harmoniques entemps.
Transformation par rapport a l’espace Nous allons maintenant appli-quer une triple transformation de Fourier par rapport aux trois coordonneesd’espace : ug(ξ, ω) =
∫R3
ug(x, ω,a)e−iξ·xdx (B.35)
La solution de (B.34) s’obtiendra une fois ug(ξ, ω, a) connue par transfor-mation inverse :
ug(x, t) = 1/(2π)4∫
R4
ug(x, ω,a)e−iξ·xξω (B.36)
L’expression (B.36) montre que nous avons decompose le probleme sur l’en-semble des ondes planes harmoniques, de pulsation ω et de vecteur d’onde ξ.Les ondes planes utilisees ici ne sont plus forcement solutions de l’equationhomogene, ω et ξ n’etant a priori lies par aucune relation. Nous devons
maintenant determiner ug(ξ, ω), l’amplitude de l’onde plane de pulsationω et de vecteur d’onde ξ contribuant a la solution ug(x, t). Pour ce faire,effectuons maintenant la transformation de Fourier des differents termes del’equation (B.34). La force appliquee :
f(x, t) = δ(x)δ(t)a devient f(ξ, ω) = a (B.37)
f est donc constante pour tout (ξ, ω) de R3 × R, la force f a donc unecontribution egale sur toutes les ondes planes harmoniques, elle cree doncdes ondes planes dans toutes les directions, et a toutes les frequences. Afinde transformer les autres termes de (B.34) nous allons utiliser les relationsde derivation suivantes H :
(∂ju) = −iξju
(div u) = −iξ · u
(∆u) = −|ξ|2u(grad div u) = −(ξ.u)ξ
L’equation (B.34) devient donc dans l’espace transforme :
(λ + µ)(ξ · ug)ξ + (µ|ξ|2 − ρω2)ug − a = 0 (B.38)

66
Resolution dans le domaine transforme Si nous effectuons dans l’equationprecedente le produit scalaire avec ξ nous obtenons10 :
(ξ · ug) =a · ξ
ρ(c2p|ξ|2 − ω2)
(B.39)
Cette relation reportee dans (B.38) donne apres normalisation et reductionde la fraction rationnelle :
ρc2sug(ξ, ω) =
a
|ξ|2 − k2s
+(a · ξ)ξ
k2s
( 1|ξ|2 − k2
s
− 1|ξ|2 − k2
p
)(B.40)
Les vecteurs d’ondes kp et ks etant definis par :
ka = ω/ca , α ∈ s, p (B.41)
Au sens usuel 11 la relation (B.40) n’a pas de sens pour |ξ| 6= ±ks et|ξ| 6= ±kp. Ces valeurs correspondent aux ondes planes qui se propagentlibrement dans l’espace homogene que nous avons mises en evidence au pa-
ragraphe precedent et pour ces valeurs de ξ et de ω , ug n’est pas determine.L’expression (B.40) etablie, il nous faut maintenant effectuer la transforma-tion inverse par rapport a ξ puis par rapport a ω.
B.4.2 Fonction de Green stationnaire
Si nous considerons un systeme d’axes orthonormes orientes par les vec-teurs e1, e2 et e3 tel que e3 = x/|x|. Le vecteur ξ est alors defini en coor-donnees spheriques par ξ = (ρsinθcosϕ, ρsinθsinϕ, ρcosθ)T .
10Notons que cette multiplication n’est pas innocente. En effet effectuer le produit sca-laire par iξ revient a prendre le gradient de l’equation. Si on se refere a la decompositionde Helmholtz, on se rend compte que l’on selectionne ici les ondes de compression.
11Au sens des distributions, la division qui a ete effectuee a bien un sens. Rappelons quesoit T une distribution et f une fonction s’annulant aux point xi, alors l’equation fT = 1a pour solution :
T = 1/f +Xi
αiδxi (B.42)
1/f etant une pseudo-fonction et les αi des constantes quelconques. L’apparition des cesconstantes se comprend mieux si on remarque que dans le domaine de Fourier, diviserune fonction par iξ revient dans le domaine physique a integrer cette fonction. A cetteintegration est associee une constante d’integration, role joue dans le domaine transformepar les constantes αi. La fonction iξ ne s’annule qu’en 0, la constante est donc de laformeαδo, dont la transformee de Fourier inverse est bien la fonction constante. Dans lecas particulier de la fonction de Green, la fonction au denominateur s’annule sur les deuxhypercones a base spherique d’equation :
|ξ|2 = k2s |ξ|2 = k2
p (B.43)
A chaque point de ces surfaces correspond une onde plane monochromatique, la solutionde la fonction de Green est donc definie a une superposition d’ondes plane pres. Commecela a deja ete mentionne, les conditions initiales imposeront la nullite de ces ondes planes.

67
Soit g la fonction de ξ definie par :
g(ξ) = 1/(ρ2 − k2) (B.44)
et g sa transformee de Fourier inverse :
g(x) =( 1
2π
)3∫
R3
e−iξ·x
ρ2 − k2dξ (B.45)
Grace au choix du repere, on peut poser x = (0, 0, r)T , nous avons alors :
g(x) = 1/(2π)2∫ +∞
0
1ρ2 − k2
∫ π
0eiρr cos θ sin θdθρ2dρ (B.46)
Soit en integrant par rapport a ϕ :
g(x) = 1/(2π)2∫ +∞
0
e−iρr − eiρr
ir(ρ2 − k2)ρdρ =
−1ir(2π)2
∫ +∞
−∞
eiρr
ρ2 − k2ρdρ (B.47)
Cette derniere integrale est evaluee en considerant ρ sur un contour fermedu plan complexe qui pour k positif ne comportera que le pole −k12.
Nous obtenons donc comme transformee inverse de la fonction g :
g(x) =eikr
4πr(B.48)
Le choix du contour a ete effectue de facon a eliminer de la solution destermes non admissibles physiquement, correspondant a des ondes provenantde l’infini (k = ω/c). Grace au resultat pecedent, nous avons immediatement :
F−1( 1|ξ|2 − k2
)=
eikr
4πr(B.49)
De plus, nous avons vu que pour une fonction g(x), et un vecteur a :
(grad div (g(x)a)) = −g(ξ)(a · ξ)ξ (B.50)
Nous obtenons alors la fonction de Green stationnaire :
µug(x, ω) = Gs(r)a+ (1/ks)2grad div ((Gs(r)−Gp(r))a) (B.51)
12Pour justifier rigoureusement le choix de ce contour, il convient d’utiliser le principed’absorption limite consistant a introduire une petite partie imaginaire a la frequence eten effetuant la passage a la limite. Une autre facon de justifier le choix de ces contoursest d’introduire un peu d’amortissement dans le systeme (de la viscosite par exemple). Onremarque alors que les equations ecrites precedemment peuvent etre conservees a conditionde prendre des coefficients de Lame ayant une petite partie imaginaire. Les poles en desfractions rationnelles ne seront plus alors strictement sur l’axe reel mais seront decalesl’un vers le haut et l’autre vers le bas, justifiant ainsi le choix retenu pour le contourd’integration.

68
avec :
Gα(r) =eikαr
4πr, α = p, s (B.52)
On peut egalement obtenir d’autres expressions interessantes en notant quepour toute fonction g(r)
div (ag(r)) = (a · er)g′(r)grad div (g(r)a) = r−1(a− (a · er)er)g′(r) + r(a · er)erg′′(r)(B.53)
Soit :
µug(x, ω) = aGs(r) + (cs/ω)2r−1a(G′s(r)−G′p(r)) +
(a · er)er[rG′′s(r)−G′s(r)− rG′′p(r) + G′p(r)]
(B.54)
avec :
G′α(r) = r−1(irω/cα − 1)gα(r) (B.55)G′′α(r) = r−2(2− 2irω/cα − (rω/cα)2)gα(r) (B.56)
Le resultat completement developpe donne :
µug(x, ω) = aGs(r) + 1/(ksr)2((1− ikpr)Gp(r)− (1− iksr)Gs(r))a+[(3(1− iksr)− (ksr)2)Gs(r)−(3(1− ikpr)− (kpr)2)Gp(r)](a · er)er (B.57)
La formule (B.57) nous permet d’obtenir la limite statique de la fonction deGreen stationnaire en effectuant un developpement limite en 1/ω :
µug(x, 0) = r−1(a+ (c2s/c2
p − 1)(a− (a · er)er) (B.58)
B.4.3 Fonction de Green transitoire
Nous devons maintenant effectuer la transformation inverse par rapporta la frequence de ug(x, ω), soit d’apres le developpement precedent les trans-formations inverses de deux fonctions de la forme :
f(ω) = eiωα
h(ω) = (ω−2 − iαω−1)f(ω)

69
Or, en notant δ la mesure de Dirac13, et H la fonction de Heaviside 14 onetablit facilement15 :
f(t) = 1/(2π)∫ +∞
−∞e−iω(t−α)dω = δ(t− α)
h(t) = = tH(t− α)
d’ou l’expression de la fonction de Green transitoire :
4πρug(x, t) = r−3(3(a.er)er − a)tH(t− r/cp)−H(t− r/cs))+r−1c−2
s (a− (a.er)er)δ(t− r/cs)+r−1c−2
p (a.er)erδ(t− r/cp) (B.61)
Champ lointain Les deux derniers termes de cette equation constituentle champ lointain. La decroissance en fonction de la distance est faible (1/r).Ces termes representent en fait deux trains d’ondes distincts se propageantde la source vers l’infini. Il s’agit d’ondes spheriques, les fronts d’onde definispar :
t− r/cα = 0 (B.62)13δ est definie pour tout ϕ par (δ, ϕ) = ϕ(0)14H(t) est definie par :
H(t) = 1 pour t ≥ 0 (B.59)
H(t) = 0 pour t < 0 (B.60)
et verifie H ′ = δ15Calculons la transformee de Fourier de la fonction suivante :
g(t) = t pour t ≥ 0
g(t) = 0 pour t < 0
cette fonction n’admet une transformee de Fourier qu’au sens des distributions, pour toutefonction ϕ a decroissance rapide et infiniment derivable sur R, nous avons :
(g′′, ϕ) = (g, ϕ′′) =
Z +∞
0
tϕ′′(t)dt = −Z +∞
0
ϕ′(t)dt = ϕ(0) =< δ, ϕ >
= (bδ, bϕ) = (bg, cϕ′′) = −ω2(bg, bϕ)
d’ou : bg(ω) = −1/ω2
Un raisonnement identique portant sur la fonction de Heaviside H nous donne :bH(ω) = −i/ω
Nous obtenons alors :
h(t) = (g(t) + αH(t)) ∗ δ(t− α) = tH(t− α)

70
aa
r=cpt r=cst
Fig. B.3 – Fronts d’ondes P et S en champ lointain
t=r/cp t=r/cs
t
r3||u||
Fig. B.4 – Front d’onde en champ proche
etant au temps t les spheres de rayon cαt. Les vitesses de propagation etantdifferentes, ces deux ondes ne coıncident qu’au temps t = 0. Le vecteur-deplacements de l’onde de compression se propageant a la vitesse cp est di-rige suivant le rayon vecteur qui est aussi le vecteur d’onde. Nous retrouvonsici des caracteristiques identiques a celles de l’onde plane de compression.Par contre le module du vecteur-deplacements n’est pas constant sur le frontd’onde, et il varie suivant le cosinus de l’angle entre le rayon vecteur et ladirection de la source (fig B.4.3 ). Cette caracteristique semble assez natu-relle, la force ponctuelle creant des compressions dans le sens de la force,et des cisaillements perpendiculairement a celle-ci. Le vecteur-deplacementsde l’onde de cisaillement est comme dans le cas des ondes planes de cisaille-ment dirige perpendiculairement au vecteur d’onde. Il n’est pas lui non plusconstant en module sur le front d’onde et varie suivant le sinus de l’angleentre le rayon vecteur et la direction de la force.
Champ proche Le premier terme de (B.61) est appele le champ proche.En effet il est a decroissance rapide (1/r3) par rapport aux autres termes.Il est quant a lui beaucoup moins localise que les champs lointains. En fait,

71
le champ de deplacements est compris entre deux fronts d’ondes, l’un sepropageant a la vitesse des ondes de compression, l’autre a la vitesse desondes de cisaillement.
B.5 Conclusion
Dans un domaine elastique homogene, nous avons mis en evidence deuxtypes d’ondes, les ondes de compression et les ondes de cisaillement. Cesondes peuvent avoir differentes formes et nous avons particulierement etudieici les ondes planes et les ondes spheriques. Ainsi, on notera que cettedecomposition peut toujours etre effectuee des lors que l’on est capable loca-lement de calculer la divergence et le rotationnel du champ de deplacement.Ainsi pour des problemes plus complexes, il sera toujours possible de definirdans une zone relativement homogene de l’espace les deux potentiels as-socies. Par contre comme nous le verrons dans le chapitre suivant, cettedecomposition n’est plus realisable au niveau des conditions aux limites eton observera alors un couplage entre ces ondes.
L’autre aspect important de ce chapitre est la construction d’une fonctionde Green. Cette solution constitue en fait la resolvante de l’operateur etelle nous permettra par la suite de construire n’importe quelle solution del’equation de Navier. Cet aspect ”constructif” de la fonction de Green a dejaete remarque dans ce chapitre puisque nous avons montre qu’elle permet deconstruire la solution de l’equation de Navier pour une densite de forcequelconque. Dans un prochain chapitre nous montrerons qu’elle permet deconstruire egalement des solutions de cette equation avec des conditions auxlimites quelconques.
B.6 Exercices
1. Condition d’impedance d’une onde plane.Montrer que pour une onde plane nous avons toujours la relation :
t(ua) = ρca∂tua (B.63)
t(ua) etant la contrainte sur la facette ayant pour normale la directionde propagation.Comparer cette expression a la condition de compatibilite vue dans lechapitre 1.
2. Contraintes creees par une onde plane. Exprimer la contrainte creeepar des champs d’ondes planes de type P et S sur une facette denormale quelconque n.
3. Ondes spheriques :

72
Montrer qu’une solution de la forme :
g(x, t) = avec r = ‖x‖ (B.64)
est solution de l’equation des ondes dans R3 − 0. Caracteriser cettesolution.N.B. : Le Laplacien d’une fonction de r en coordonnees spheriquess’ecrit : ∆f = ∂r(r2∂rf)
4. Fonction de Green :– A partir de l’expression de la fonction de Green, exprimer les deux
potentiels dont elle derive.– Donner l’expression des deux potentiels dont derive la force ponc-
tuelle de direction a.– En deduire les equations verifiees par les potentiels dont derive la
fonction de Green.– Resoudre ces equations pour retrouver la reponse de la question 1.
Probleme : Champ cree par un dipole Comme nous l’avons montre,la fonction de Green nous permet de generer de nombreuses solutions del’equation des ondes dans R3. Neanmoins, elle ne permet pas d’acceder di-rectement au solution de probleme ou la source est constituee par des couplesde forces. Ce probleme est pourtant assez repandu en sismologie, ou les se-cousses sismiques sont generalement creees par le glissement d’une faille,que l’on peut representer par deux forces de directions opposees de part etd’autre de la faille. Nous devons alors resoudre le probleme suivant :
∆∗u− ρ∂ttu+ δt∂nδy = 0 (B.65)
∂nδ etant la distribution de forces correspondant a deux forces ponctuellesde directions opposees appliquees de part et d’autre d’une facette de normalen et ∆∗ l’operateur de l’elasticite donne apparaissant dans l’equation (B.7).Au lieu de resoudre cette nouvelle equation, nous allons utiliser la solutiondeja obtenue.
1. Montrer en derivant l’equation (B.30) que ∂n(y)uga(y,x, t) est solution
de l’equation precedente.
2. donner les expressions de ∂n(y)uga(y,x, t) et ∂n(y)u
ga(y,x, ω)
3. montrer que contrairement a la fonction de Green qui ne ne presentaitdes symetries binaires correspondant a des modes de Fourier d’ordre 0ou 1, le champ cree par un dipole presente des symetries quaternaires,correspondant a des modes de Fourier d’ordre 0, 1 ou 2.
4. Commenter l’allure de la decroissance du champ lointain.
5. Donner formellement l’expression du champ cree par des multi-polesd’ordres plus eleves.

Annexe C
Reflexion et transmissiond’ondes planes sur desinterfaces
C.1 Introduction
Dans le chapitre precedent nous avons etudie la propagation des ondeselastiques dans un espace homogene. Nous avons en particulier montre queces ondes pouvaient se decomposer en ondes P et S, ces ondes evoluantdans le milieu homogene de facon totalement independante. Nous allonsmaintenant etudier ce que deviennent ces ondes lorsqu’elles atteignent desdiscontinuites dans le milieu, qu’il s’agisse de conditions aux limites imposeesou de discontinuites de vitesse. En fait, pour faire apparaıtre les phenomenesimportants de reflexion et de transmission, il apparaıt suffisant d’etudier lecomportement d’ondes planes incidentes sur une interface elle meme plane etc’est l’objet de ce chapitre. Nous etudierons dans des chapitres ulterieurs ala fois le cas d’ondes non necessairement planes, mais aussi le cas d’interfacesquelconques.
D’une maniere generale, une discontinuite des proprietes du materiaumodifie les caracteristiques de la propagation des ondes. Seule une partie desondes est transmise a travers l’obstacle, une partie etant reflechie. Ces ondesne sont pas reflechies et transmises dans des directions quelconques et ellesdevront verifier par rapport a l’onde incidente les lois de la reflexion aussiappelees lois de Descartes que nous exhiberons ici. Ensuite on observera queles amplitudes de ces ondes emises par l’interface ne sont pas quelconques etl’on parlera alors de coefficients de reflexion et de transmission. Par ailleurs,nous remarquerons que l’interference entre la propagation et la presence de lafrontiere peut de plus donner lieu a un nouveau type d’ondes que l’on appelleondes de surface car l’amplitude du champ de deplacement associe decroıtavec la profondeur. Parmi ces ondes de surface certaines sont particulieres
73

74
car elles peuvent se propager librement dans le milieu en l’absence de toutchamp incident. Ce sont des modes libres de propagation encore appelesondes guidees, l’onde de Rayleigh en est un exemple dans le cas du demi-espace homogene avec condition de surface libre.
Notons enfin que l’objet de ce chapitre n’est pas de fournir une etudecomplete de la reflexion des ondes planes elastiques, mais de faire apparaıtreles principaux phenomenes en jeu dans ce type de probleme. De ce fait, nouslimiterons cette etude a des cas simples comme le demi-espace homogene.Par ailleurs nous ne nous interesserons qu’a des ondes harmoniques.
C.2 Le probleme de reflexion
Bien que l’on ne traite dans ce chapitre que d’ondes planes se diffractantsur des plans, le probleme sera pose ici dans le cadre general d’un problemede diffraction d’ondes. On introduira en particulier les notions de champsincidents et champs diffractes ou champ reflechi. Soit donc un domaine Ωinfini (le demi-espace defini par x·n ≤ 0) de frontiere Γ (le plan defini par unpoint O et le vecteur normal unitaire n). Sur Γ sont imposees des conditionsaux limites (surface libre dans notre cas). Le chargement mecanique estdonne comme un champ ui(x, ω), appele champ incident (dans le cas presentune onde plane de vecteur d’onde ki et polarisee suivant le vecteur di). Cechamp represente le champ emis par des sources situees a distance finie ouinfinie ; il verifie donc les equations de l’elastodynamique. Par contre il neverifie pas les conditions aux limites sur la frontiere Γ. Dans le cas particulierde l’onde plane, le fait qu’elle soit incidente signifie qu’elle se propage endirection de la surface libre (ki · n > 0). Le champ incident ne verifiant apriori pas les conditions aux limites imposees sur la frontiere du domaine, oncherche le champ total u verifiant ces conditions aux limites sous la forme :
u = ui + ud (C.1)
ou ud est appele le champ diffracte ou champ reflechi. Cette decompositionest naturelle pour faire apparaıtre le chargement ui et on montre qu’elleest egalement necessaire d’un point de vue theorique afin d’assurer l’unicitede la solution de notre probleme. De ce point de vue, ud ne devra pas etrequelconque pour que la solution soit unique. De facon generale, ce champdevra verifier des conditions de radiation, exprimant qu’il s’agit d’un champd’onde qui s’eloigne de la frontiere Γ. De facon intuitive, si ud est une ondeplane, son vecteur d’onde kd devra verifier kd · n < 0.
Resoudre ce probleme dans le cas d’une condition de surface libre im-posee sur Γ revient donc a trouver ud elastodynamique tel que :
tn(ud) = −tn(ui) sur Γ (C.2)

75
ui etant fixe, et tn(u) etant la contrainte associee au champ u s’exercantsur une facette de normale n. Dans le cas d’une onde plane incidente sur unplan la demarche nous allons montrer les points suivants :
– le champ reflechi ud est une superposition d’ondes planes,– ces ondes reflechies restent dans le plan d’incidence et leurs directions
sont donnees par les lois de la reflexion de Decartes,– les ondes de cisaillement polarisees dans la direction perpendiculaire
au plan d’incidence sont decouplees des ondes de compression et decisaillement polarisees dans le plan d’incidence.
Afin de demontrer ces differents points, il convient de poser quelques nota-tions et d’exprimer la trace d’une onde plane sur un plan.
C.2.1 Trace d’une onde plane sur un plan
Un champ d’onde plane harmonique u s’ecrit :
u = adei(k·x−ωt) (C.3)
ou k est le vecteur d’onde et d la direction de polarisation (on choisit ‖d‖ = 11 l’amplitude de cette onde. On appellera onde plane unitaire une ondeplane d’amplitude unite (a = 1). Comme nous l’avons montre au chapitreB, pour que le champ u soit solution des equations de l’elastodynamique, ilest necessaire d’avoir :
– soit une onde P : |k|2 = k2p = ω2/cp
2, et d//k
– soit une onde S : |k|2 = k2s = ω2/cs
2, et d · k = 0Soit P le plan de normale n et passant par le point de xo. La presence duplan de la surface libre introduit une donnee supplementaire permettantde mieux specifier la direction du deplacement dans le cas d’une onde decisaillement. Il est interessant de definir deux vecteurs :dsv compris dansle plan (k,n) appele plan d’incidence et dsh perpendiculaire a ce plan (figC.2.1), ainsi que le triedre direct (e1, e2, e3) oriente par rapport a ce plan.Pour k et n donnes, on definit donc :
dsh = k ∧ n , dsv = k ∧ dsh (C.6)e1 = dsh ∧ n , e2 = dsh , e3 = n (C.7)
1Posons quelques notations, pour un complexe a on note |a| son module. Pour unvecteur a ∈ C3, on note :
‖a‖2 = a · a la norme de a
|a|2 = a · a (C.4)
ainsi que la decomposition d’un vecteur a quelconque en partie normale et tangentiellesous la forme :
a = a′ + ann a′ · n = 0 (C.5)

76
n
k
dsh
dsv
e1
Surface libre
Plan d’incidenceFront d’onde dsh
Fig. C.1 – Vecteurs d’onde et plan d’incidence
On definit l’angle d’incidence θα comme l’angle que forme le vecteur d’ondepar rapport a n :
ξ =k
‖k‖= sin θαe1 + cos θαn (C.8)
On peut alors exprimer dp et dsv sur la base locale (e1,n) sous la forme :
dpn = ξpn = cos θα , dp1 = ξp1 = sin θα (C.9)dsvn = ‖ξ′‖ = sin θα , dsv1 = −ξsvn = − cos θα (C.10)
C.2.2 Vecteur contrainte associe a une onde plane
Afin de pouvoir exprimer la condition aux limites il convient d’exprimerle vecteur contrainte sur la frontiere Γ de normale n. Dans le cas d’unmateriau lineaire elastique isotrope, il est donne par :
tn(u) = λdiv (u)n+ 2µε(u) · n (C.11)
Dans le cas d’une onde plane de type α (α = p, s), on en deduit une formeassez simple de tn(uα) 2 :
tn(uα) = aαtαei(kα·x−ωt) α ∈ p, sv, sh (C.13)2Il est possible de deduire de cette expression l’impedance associee a une onde plane
dans une direction n quelconque :
tn(u) = iµk[(κ2 − 2)n⊗ ξ + ξ ⊗ n + ξnI]u (C.12)

77
avec :
tα = iµkα[(κ2 − 2)(d · ξ)n+ dnξ + ξnd] κ = cp/cs (C.14)
En specifiant a present les differents types d’ondes, on obtient :– pour les ondes P ( Rappel : d = ξ, k = kp )
tp = iωρcsκ−1[(κ2 − 2ξ2
1)n+ 2ξ1ξne1] (C.15)= iωρcsκ
−1[(κ2 − 1 + cos 2θ)n+ sin 2θe1] (C.16)
– pour les ondes SV ( Rappel : d · ξ = 0, k = ks )
tsv = iωρcs[2ξn‖ξ′‖n+ (2‖ξ′‖2 − 1)e1] (C.17)= iωρcs[sin 2θn− cos 2θe1] (C.18)
– pour les ondes SH ( Rappel : d · ξ = 0, k = ks )
tsh = iωρcsξne2 (C.19)
On remarquera que les vecteur-contraintes et deplacements associes auxondes P/SV sont dans le plan d’incidence, alors que le vecteur-contraintes as-socie aux ondes SH est perpendiculaire a ce plan et se trouve ainsi decouple.Ce resultat est bien entendu seulement valable dans le cas d’un materiauelastique isotrope.
C.2.3 Phase apparente d’une onde plane sur le plan
Si on considere la trace sur le plan P du vecteur deplacement uα ou duvecteur contrainte tn(uα) il est possible d’isoler la dependance spatiale sousla forme :
v(x) = avoei(ξ′·x′−ωt) (C.20)
pour x tel que (x− xo) · n = 0Ainsi, observee sur la surface de ce plan, l’onde a une vitesse apparente
cα de la forme :cα =
cαsin θα
(C.21)
Cette vitesse aussi appelee vitesse de phase est superieure a la vitesse del’onde3. Ce paradoxe s’explique par le fait que l’information recue sur cettesurface vient de differents points du front d’onde reel et ne contredit pasla notion de vitesse limite (Fig C.2.3). On notera de plus que sur le planle front d’onde apparent est une droite, le vecteur d’onde apparent est unvecteur du plan de norme inferieure a la norme du vecteur d’onde reel etenfin que la longueur d’onde apparente est superieure a la longueur d’ondereelle. En conclusion on remarquera que le vecteur d’onde k′ est le vecteurqui regit la variation spatiale du champ de deplacement ou de contrainte surla surface, et qui apparaıtra donc dans la condition aux limites.
3Dans le cas d’une onde ayant une incidence normale au plan, la vitesse apparente estinfinie puisque tous les points du plan vibrent en phase.

78
θ
cdt
cdt/sinθ
Fig. C.2 – trace d’une onde plane sur un plan
C.2.4 Flux d’energie associe a une onde plane
Il peut etre important de quantifier le flux d’energie traversant le planP lors du passage d’une onde plane. Ce flux d’energie s’exprime simplementpour un champ u par :
Φ =∫Ptn(u)∂tudS =
∫P
φdS (C.22)
φ etant le flux elementaire par unite de surface qui sera etudie ici car le fluxtotal est infini. Nous avons vu au chapitre precedent que sur le front d’ondeles contraintes sont proportionnelles aux deplacements ce qui donne doncdans la direction kα :
φ = iωtn(uα) · uα = ρω2cα‖dα‖2 = ρω2cα (C.23)
On verifiera que ce flux est nul sur toute surface tangente a la direction depropagation ξ et on deduit de (C.14) que le flux au travers d’un plan denormale n est egal du fait du rapport des aires a :
φ = ρω2cα cos θα (C.24)
C.3 Reflexion sur une surface libre et ondes desurface
Les calculs precedents permettent de traiter maintenant assez facilementle probleme de la diffraction d’un train d’ondes planes sur la surface d’undemi-espace. On se donne a priori le champ incident sous la forme proposeeprecedemment :
ui = dαiei(kiα·x−ωt) (C.25)

79
avec α ∈ p, sv, sh et sans sommation sur cet indice. Supposons que lechamp diffracte ud s’ecrive sous la forme d’une superposition d’ondes planes4
ud =∑β
aβddβeikβd·x (C.37)
4Ceci peut etre montre formellement : Le probleme aux limites s’ecrit pour le champdiffracte ud :
tn(ui + ud) = 0 , surΓ (C.26)
ou Γ est la frontiere du demi-espace z = 0, de normale n = e3. En reportant dans cetteequation l’expression de t(ui) obtenue dans le paragraphe precedent et en omettant leterme e−iωt, on remarque que t(ud) s’ecrit necessairement sous la forme :
t(ud) = t(ud)eik′·x′ (C.27)
t(ud) ne dependant pas de x′. Par ailleurs si ud est decompose sur les trois potentielsscalaires φ, ψ et χ sous la forme :
ud = grad φ+ rot (rot (ψn)) + rot (χn) (C.28)
et qu’une separation des variables horizontales x′ et de la variable verticale xn est effectueesur ces trois potentiels sous la forme :
φ(x′, xn) = φ(xn)φ∗(x′) (C.29)
ψ(x′, xn) = ψ(xn)ψ∗(x′) (C.30)
χ(x′, xn) = χ(xn)χ∗(x′) (C.31)
on montre aisement (par transformation de Fourier par exemple) que si t(ud) ne s’annulepas, on a necessairement du fait de la condition aux limites :
φ∗(x′) = ψ∗(x′) = χ∗(x′) = eik′i·x
′(C.32)
Les fonctions φ(xn) ,ψ(xn) et χ(xn) verifient par ailleurs les equations differentielles sui-vantes :
φ′′ + (k − ‖k′i‖2)φ = ψ′′ + (k − ‖k′i‖2)φ = χ′′ + (k − ‖k′i‖2)χ = 0 (C.33)
et on en deduit donc que les trois potentiels φ, ψ et χ sont respectivement la superpositiond’ondes planes scalaires de la forme :
φ = φ+o e
ik+p ·x + φ−o e
ik−p ·x k±pn = ±k±p′ = k′i (C.34)
ψ = ψ+o e
ik+s ·x + φ−o e
ik−s ·x k±sn = ±k±s′ = k′i (C.35)
χ = χ+o e
ik+s ·x + φ−o e
ik−s ·x (C.36)

80
ces ondes planes verifiant les conditions de radiation ad hoc de facon aassurer l’unicite du probleme 5 :
kβn < 0 (C.39)
C.3.1 Les lois de la reflexion
Les inconnues du probleme sont a present les amplitudes aβd et les vec-teurs d’onde diffractes kβd. Les polarisations dβ des deplacements des ondesdiffractees sont immediatement determinees par le type d’onde et le ca-ractere unitaire des vecteurs dβ. En fait, les vecteurs d’ondes kβd ne sontpas quelconques. En effet, si on reporte l’expression de ud dans la conditionaux limites sur Γ, on obtient :∑
β
aβdtdβeikβξ′βd·x′ = −tαieikαξ′i·x′ sur Γ (C.40)
avec les tdβ independant de x′6. C’est un systeme lineaire en les amplitudesaβd qui doit etre verifie quel que soit x′ et ceci ne peut etre vrai que si ona :
k′βd = k′i (C.41)
Rappelons que kα et kβ valent kp ou ks et que k′i est donne. En eliminantla frequence7, on en deduit :
ξ′βd = (cβ/cα)ξ′i (C.42)
Cette egalite est vectorielle et exprime que les projections sur le plan desvecteurs d’onde des ondes incidentes et reflechies sont egales. L’egalite en
5Unicite et condition de radiation : Le champ incident, comme le nom l’indique, cor-respond a une propagation vers la surface libre. Si le demi-espace est defini par :
Ω = x/x3 < 0 (C.38)
on a suppose le sens de propagation vers n = e3. Cela impose kin > 0. De la mememaniere, il faut imposer une condition de radiation aux champs diffractes, c’est a dire unecondition sur le nombre d’onde vertical kβn. Deux cas sont possibles :
– soit ‖k′i‖ < kdβ , kdβn est reel et on impose alors a l’onde plane diffractee de s’eloignerde la surface libre :φ+
o = 0,– soit ‖k′i‖ > kdβ , kdβn est imaginaire pur et on impose alors au champ de s’annuler a
l’infini :φ+o = 0.
A l’aide de ces conditions de radiation ou de decroissance, il est donc possible d’exprimerle champ diffracte ud en trois ondes planes elastiques respectivement de type p, sv et shderivant des trois potentiels φ, ψ et χ
6On notera que les lois de la reflexion que nous etablissons ici sont encore valables pourtout type de conditions aux limites puisque que l’on ne travaille ici que sur les phaseset non sur les amplitudes et que cette phase est la meme pour les deplacements ou lescontraintes.
7On notera que les lois de la reflexion sont independantes de la frequence : la reflexionsur une interface ne modifie pas le spectre d’une onde.

81
kpiksvd
kpd
θsvθi
k’i k’d
||kp||=ω/cp
||ks||=ω/cs ksvi
ksvd
kpdθpθi
k’i k’d
||kp||=ω/cp
||ks||=ω/cs
Fig. C.3 – Lois de la reflexion
direction indique que la reflexion a lieu dans le plan d’incidence. Le vecteurd’onde diffracte etant de norme fixee il ne peut prendre que deux valeurs lacondition de radiation permettant de selectionner la solution physiquementadmissible. Exprimee en fonction des angles d’incidence et de reflexion cetterelation donne la loi de Descartes elaboree par Stokes pour l’elasticte [66] :
sin θβdcβ
=sin θαi
cα(C.43)
Pour une polarite d’onde incidente β et une polarite d’onde diffractee α dememe type, on aura :
‖ξ′βd‖ = ‖ξ′i‖ < 1 (C.44)
Par contre, si les modes de l’onde incidente etde l’onde reflechie sont dis-tincts, on aura :
– soit : α = P , et ‖ξ′sd‖ = (cs/cp)‖ξ′i‖ < ‖ξ′i‖ < 1– soit : α = S, et ‖ξ′pd‖ = (cp/cs)‖ξ′i‖ > ‖ξ′i‖
On remarque ainsi que pour une onde P incidente, l’onde SV reflechie a unangle de reflexion plus faible que l’angle d’incidence. Par contre, pour l’ondeSV incidente, l’onde P reflechie a un angle plus eleve. Il apparaıt donc unangle critique au dela duquel les ondes P reflechies sont d’un type particulieret sont appelees ondes de surface.
C.3.2 Angle critique et ondes de surface
Lorsque l’onde incidente est une onde de cisaillement, l’angle critiqueapparaıt lorsque le vecteur d’onde de l’onde P reflechie devient horizontal.Cet angle critique θc est donc egal a :
θc = arcsin(cscp
) (C.45)
Au dela de cette limite, il n’est plus possible de raisonner en terme d’anglede reflexion. Par contre, en terme de vecteurs d’onde on a toujours :
k′dp = k′isv (C.46)

82
En remarquant que kdp · kdp = ω2/c2p , on obtient alors en ne retenant que
des solutions bornees a l’infini :
kdpn = −ik∗dpn , k∗dpn =
√‖k′dp‖2 − ω2
c2p
(C.47)
Ondes de surface On obtient alors une solution de la forme :
udp = ddpek∗dpnxnei(k
′dp·x′−ωt) (C.48)
Cette solution est appelee onde de surface car elle ne se propage que dans ladirection horizontale a la vitesse apparente cj independante de la frequenceet inferieure a la vitesse des ondes P8 :
cϕ =ω
‖k′dp‖=
cssin θi
< cp (C.49)
Dans la direction perpendiculaire a l’interface, cette onde a une phase constante(pas de propagation) et une amplitude decroissant exponentiellement. Lesdeplacements restent confines au voisinage de la surface d’ou le terme d’ondede surface. L’epaisseur mobilisee est inversement proportionnelle a k∗dpn.Ainsi, plus la frequence est elevee, plus l’epaisseur mobilisee est faible. Ilen est de meme losque l’angle d’incidence augmente.
Polarisation des ondes de surface Une autre caracteristique propreaux ondes de surface reside dans la polarisation des deplacements associes.En effet, cette onde etant une onde de compression, le vecteur deplacementddp est proportionnel au vecteur d’onde kdp. On en deduit donc que si ledeplacement horizontal est reel, le deplacement vertical est imaginaire pur.D’un point de vue physique cela signifie qu’en fonction du temps ces deuxcomposantes sont en quadrature. En effet, pour une onde harmonique, lescomposantes normales et tangentielles du deplacement sur la surface libreau point x′ = 0 s’exprime en fonction du temps sous la forme :
udpn(t) = <(udp · ne−iωt) = −a√
1− c2ϕ/c2
p sinωt
udp1(t) = <(udp · e1e−iωt) = acosωt (C.50)
Les trajectoires de particules forme donc des ellipses dont le grand axe esttangent a la surface et parcourues dans le sens des aiguilles d’une montre.
8On a deja remarque qu’une onde reflechie a une vitesse de phase sur la surface libretoujours superieure a la vitesse reelle dans le milieu

83
ksvi
ksvd
kpd
Re(θp)θi
k’i k’d
||kp||=ω/cp||ks||=ω/cs
Img(k.n)
Re(kpd)
γpdn
kp.kp=ω2/cp2
Re(k.n)
Fig. C.4 – Reflexion au dela de l’angle critique
Flux d’energie associe a une onde de surface Ces caracteristiques :– trajectoire elliptique prograde,– vitesse apparente plus lente que les ondes de volume,– vitesse independante de la frequence.
rendent l’identification de ces ondes de surface tres aisee. Elles sont de plustres utilisees d’un point de vue pratique. En effet, la zone mobilisee va-riant comme l’inverse de la frequence, elles permettent donc d’obtenir desinformations sur des zones plus ou moins profondes sous la surface. Ainsiplusieurs methodes experimentales utilisent ces ondes tant en genie civil(Methode d’inversion des ondes de surface) qu’en controle non destructifpour determiner la profondeur des fissures debouchantes.
C.3.3 Coefficients de reflexion
Nous n’avons etudie dans l’equation (C.2) que l’egalite des phases sur lasurface et ceci a permis de determiner les directions des eventuelles ondesreflechies. Par ailleurs, le calcul des vecteurs deplacements et contraintes as-socies a chaque onde a montre que les ondes SH (ondes de cisaillement pola-risees perpendiculairement au plan d’incidence) etaient decouplees des ondesP/SV (onde P ou S polarisees dans le plan d’incidence). Il reste donc pources deux sytemes d’ondes a exprimer les amplitudes des ondes reflechies enfonction des amplitudes des ondes incidentes. Ces amplitudes relatives sontappelees coefficients de reflexion de l’interface. Si les lois de la Descartes sontindependantes de la condition aux limites imposee sur Γ (deplacements im-poses, contraintes imposees, impedance imposees), par contre, les coefficientsde reflexion sont dependants de cette condition. Du fait du decouplage, le

84
systeme lineaire se decompose donc en deux sous-sytemes SH et P-SV quel’on traitera donc separement.
ondes SH En reprenant les expressions des vecteurs associes a ces modes(C.12), on obtient :
−iµkdnad = iµkinai (C.51)
Compte tenu de la loi de Descartes, les vecteurs d’ondes tangents etantegaux, en valeur absolue les composantes normales sont egales en norme etla condition de radiation impose que les signes soient opposes (kdn = −kin).On en deduit le coefficient de reflexion :
Rshsh =ashdai
= 1 (C.52)
Le champ total etant la somme du champ incident et du champ diffracte, ledeplacement perpendiculaire au plan subit une amplification d’un facteur 2lorsque l’onde atteint la surface libre.
ondes P/SV Dans la condition aux limites (C.2) les expressions des vec-teurs contraintes sont remplacees par les formules(C.12), en notant qued’apres la loi de Descartes (C.42) l’onde incidente et les ondes diffracteesdoivent avoir le meme nombre d’onde horizontale9 p′ defini par :
p′ = ‖ξ′βd‖/cβ = ‖ξ′i‖/cα (C.53)
On obtient alors les deux equations suivantes :
iµkpapd(κ2 − 2c2
pp′2) +ksasvd2(csξsvdnp′)
= −n · t∗αi (C.54)
iµkpapd 2ξpdncpp
′ +ksasvd(2c2sp′2 − 1)
= −e1 · t∗αi (C.55)
en inversant ce systeme lineaire en ad = (apd, asvd), on obtient les coefficientsde reflexion correspondant soit a une onde P incidente ( α = P ), soit aune onde SV incidente (α = SV ) ayant chacune le meme nombre d’ondehorizontal p′. En appelant ai = (api, asvi) le vecteur des amplitudes desondes incidentes, ce systeme prend la forme suivante :
N−ad = −N+ai (C.56)
avec :
N± = iρc2sks
(κ(1− 2c2
sp′2) ±2csp
′√1− c2sp′2
±2csp′√
1− c2pp′2 −1 + 2c2
sp′2
)(C.57)
9p′ a la dimension de l’inverse d’une vitesse. Dans la litterature anglo-saxonne ce sca-laire est appele slowness, le terme lenteur n’etant pas employe dans la litterature francaise.

85
0 5 10 15 20 25 30 35 40−7
−6
−5
−4
−3
−2
−1
0
1
2
Angle d’incidence
Am
plitu
de
Rss cp/cs=1.5Rsp cp/cs=1.5Rss cp/cs=2Rsp cp/cs=2
0 10 20 30 40 50 60 70 80 90−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Angle d’incidence
Am
plitu
de
re(Rss) cp/cs=1.5img(Rss) cp/cs=1.5re(Rss) cp/cs=2img(Rss) cp/cs=2
0 10 20 30 40 50 60 70 80 90−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Angle d’incidence
Am
plitu
de
re(Rsp) cp/cs=1.5img(Rsp) cp/cs=1.5re(Rsp) cp/cs=2img(Rsp) cp/cs=2
Fig. C.5 – Coefficient de reflexion sur la surface libre, onde P et SV incidente,κ = 1.5, 2
L’amplitude des ondes reflechies s’exprime alors en fonction de l’amplitudedes ondes incidentes par l’intermediaire d’une matrice de reflexion R :
ad = Rai avec R = −(N−)−1N+ (C.58)
Les differents termes Rαβ de la matrice R expriment l’amplitude de l’ondede type β reflechie pour une onde de type α incidente10. Exprimes en termesd’angles d’incidence, ces termes prennent les valeurs suivantes :
Rpp =sin 2θp sin 2θs − κ2 cos2 2θssin 2θp sin 2θs + κ2 cos2 2θs
(C.59)
Rps =2κ sin 2θp cos 2θs
sin 2θp sin 2θs + κ2 cos2 2θs(C.60)
Rsp =−2κ sin 2θs cos 2θs
sin 2θp sin 2θs + κ2 cos2 2θs(C.61)
Rss =sin 2θp sin 2θs − κ2 cos2 2θssin 2θp sin 2θs + κ2 cos2 2θs
(C.62)
Avant d’etudier l’allure de ces differents coefficients, il convient de remarquerqu’ils sont independants de la frequence et ceci se generalisera dans le casde n’importe quelle interface11. La reflexion sur une interfaces n’introduirapas de dispersion du signal incident. Il est utile de faire quelques remarquessur les valeurs de ces differents coefficients. Le cas de la reflexion des ondesP est le plus simple car aucun angle critique n’est a prendre en compte.On remarque tout d’abord que pour les incidences 0o et 90o les ondes P et
10On notera que la convention de notation pour les coefficients de reflexion (premierindice pour l’onde incidente, second pour l’onde reflechie) est inverse de la convention quiserait usuellement utilise pour la matrice R (indice de ligne puis indice de colonne). Laraison de cette inversion vient du fait que graphiquement on represente usuellement l’ondeincidente a gauche et les ondes reflechies a droite.
11Cette constatation est en fait triviale, puisqu’aucune distance caracteristique n’ap-paraıt dans ce probleme. Les coefficients de reflexion sont donc independants de la longueurd’onde et donc de la frequence.

86
SV sont decouplees, une onde P generant alors une seule onde reflechie dememe polarisation donnant ainsi les memes resultats que dans le cas SH.Pour toutes les autres incidences il y a generation d’ondes reflechies SV. Onremarque en particulier que pour certaines incidences et certains rapportsde vitesse, l’amplitude de l’onde P reflechie s’annule conduisant ainsi a uneconversion totale. On remarque enfin que ni la somme arithmetique ni lasomme quadratique des amplitudes ne sont egales a l’amplitude de l’ondeincidente. En effet, les directions des deux ondes reflechies n’etant pas egales,il n’est pas possible de separer simplement l’energie portee par ces deuxondes pour les sommer. De ce point de vue le cas de la reflexion de l’ondeSV est symptomatique, puisqu’au voisinage de l’angle critique, le coefficientRsp peut etre superieur a 3.
On note que pour les ondes SV incidentes, les formules precedentes nesont valables qu’en dessous de l’angle critique. Au dela il convient d’utiliserles expressions fonction du nombre d’onde horizontal adimensionnel p =csp′ :
Rpp =4p2γpγs − κ(1− 2p2)2
4p2γpγs + κ(1− 2p2)2(C.63)
Rps =4κpγp(1− 2p2)
4p2γpγs + κ(1− 2p2)2(C.64)
Rsp =4κpγs(1− 2p2)
4p2γpγs + κ(1− 2p2)2(C.65)
Rss =κ(1− 2p2)2 − 4p2γpγs4p2γpγs + κ(1− 2p2)2
(C.66)
avec :γs =
√1− p2 , γp =
√1− κ2p2 (C.67)
Au dela de l’angle critique, on remarque que le coefficient de reflexion Rss
est toujours de module egal a 1, le coefficient Rsp pouvant lui etre variableet pouvant meme s’annuler donnant lieu a une reflexion pure SV-SV, avectoutefois une onde reflechie en quadrature de phase.
C.3.4 Amplifications
Les coefficients de reflexion permettent de connaıtre l’amplitude desondes reflechies par l’interface. Par contre, ils ne permettent pas directementde connaıtre des quantites mecaniques souvent utilisees dans le dimension-nement : les deplacements et les contraintes dans le milieu. Pour cela ilconvient de sommer les differentes ondes, ce qui, du fait des termes de phaseet des termes de polarisation ne revient pas a la sommation des coefficientsde reflexion.

87
0 10 20 30 40 50 60 70 80 90−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Angle d’incidence
Am
plitu
de
re(Rsp) cp/cs=1.5img(Rsp) cp/cs=1.5re(Rsp) cp/cs=2img(Rsp) cp/cs=2
0 10 20 30 40 50 60 70 80 90−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Angle d’incidence
Am
plitu
de
re(Rss) cp/cs=1.5img(Rss) cp/cs=1.5re(Rss) cp/cs=2img(Rss) cp/cs=2
0 10 20 30 40 50 60 70 80 90−2
−1
0
1
2
3
4
Angle d’incidence
Am
plitu
de
phase(Rss) cp/cs=1.5phase(Rsp) cp/cs=1.5phase(Rss) cp/cs=2phase(Rsp) cp/cs=2
Fig. C.6 – Coefficient de reflexion sur la surface libre au dela de l’anglecritique, onde SV incidente, κ = 1.5, 2
Ondes SH Nous etudions tout d’abord le cas SH, pour lequel la polari-sation est identique pour toutes les ondes incidentes ou reflechies. De plussur la surface libre, les termes de phase eiknxn sont egaux a 1 conduisantdirectement au resultat :
‖ush(0)‖ = 2aish (C.68)
Ce resultat traduit une amplification des deplacements d’un facteur 2 sur lasurface libre comme cela avait ete constate au chapitre ??. Si l’on observemaintenant le deplacement et la contrainte en fonction de la profondeur onobtient :
‖ush(xn)‖ = 2 cos ω/cs cos θixnaish (C.69)‖tn(ush)(xn)‖ = 2µ sinω/cs cos θixnaish (C.70)
On notera en particulier une concentration de contrainte d’un facteur 2a un quart de longueur d’onde sous la surface libre xn = πcs/(2 cos θiω)responsable de phenomenes d’ecaillage en surface.
Ondes P-SV Dans le cas des ondes P-SV, nous nous concentrons surl’influence de la polarisation sur les amplitudes en surface. Il est aise deverifier que pour des incidences verticales les resultats sont identiques aucas SH.
Le deplacement sur la surface prend la forme suivante :
usvn = − cos θpRsp + sin θs(Rss + 1) (C.71)‖u′sv‖ = sin θpRsp + cos θs(Rss − 1) (C.72)
upn = cos θp(1−Rpp) + sin θsRps (C.73)‖u′p‖ = sin θp(1 + Rpp) + cos θsRps (C.74)
On notera sur la figure (C.3.4) que l’amplification sur la surface libre restede l’ordre de 2 comme dans le cas SH. Le fait important a noter ici estlapparition de dephases au dela de langle critique dans le cas d’ondes SVincidentes.

88
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
2
2.5
Angle d’incidence
Am
plitu
de
unuh|u|
0 10 20 30 40 50 60 70 80 90−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5
Angle d’incidence
Am
plitu
de
re(un)re(uh)img(un)img(uh)|u|
Fig. C.7 – Amplitudes des deplacements sur la surface libre, onde P et SVincidente, κ = 2
C.3.5 Onde de Rayleigh
La solution developpee dans le paragraphe precedent correspond a unesolution particuliere du probleme de reflexion pour un champ incident. Onpeut se poser la question de l’existence d’un mode qui existerait dans ledemi-espace en l’absence de champ incident. On cherche donc s’il existe unchamp d’ondes u tel que :
t(u,n) = 0 (C.75)
ou u a la forme generale suivante :
u =∑β
Aβdβeikβξβ ·x ξβn < 0 (C.76)
D’apres les resultats du paragraphe precedent, ces ondes diffractees devrontverifier la loi de Descartes (C.42) et d’apres (C.12) la condition aux limites(C.75) peut s’ecrire :
iµkdnash = 0 N−a = 0 (C.77)
De la premiere equation il est aise de deduire qu’il ne peut y avoir de solutionnon nulle de (C.75) dans le cas SH. Par contre de la seconde on deduit lacondition necessaire et suffisante a l’existence de ce type de solution pourles ondes P-SV, c’est-a-dire :
detN− = 0 (C.78)
En utilisant comme parametre le nombre d’onde horizontal normalise p,cette relation s’ecrit :
4p2γpγs + κ(1− 2p2)2 = 0 (C.79)

89
dessous de l’angle critique (p ≤ κ−1) , γp et γs sont reels et le terme degauche est strictement positif, interdisant ainsi l’existence de toute solution.De meme lorsque seule l’onde P est une onde de surface, l’onde SV etantpropagative (κ−1 < p < 1), le premier terme de (C.79) est imaginaire puret le second est reel. Dans ce cas il n’existe donc pas de solution non plus.Dans le cas ou les ondes P et SV sont des ondes de surface (p > 1), γp et γssont imaginaires purs, en notant :
γ∗s =γsi
=√
p2 − 1 , γ∗p =γpi
=√
κ2p2 − 1 (C.80)
On obtient l’equation de Rayleigh [58, 46] :
4p2γ∗pγ∗s + κ(1− 2p2)2 = 0 (C.81)
On obtient alors en notant p = ω/cr :
(2− c2r/c2
s)2 = 4
√1− c2
r/c2s
√1− c2
r/c2p (C.82)
Cette equation n’admet qu’une racine reelle cr verifiant :
cr < cs < cp (C.83)
une formule approchee de cette vitesse etant donnee par :
crcs
=0.862 + 1.14ν
1 + ν(C.84)
L’onde correspondant a cette solution est appelee onde de Rayleigh et consti-tue en fait une onde guidee a la surface du demi-espace homogene. Sa vitesseapparente sur la surface libre etant inferieure a la vitesse des ondes de com-pression et des ondes de cisaillement, elle est constituee d’une onde de surfacede type P et d’une onde de surface de type S. L’amplitude des deplacementsdecroıt donc exponentiellement avec la profondeur. Ne deplacant qu’un faiblevolume de matiere pres de la surface, elle peut se deplacer loin parallelementa celle-ci avec une decroissance plus faible de son amplitude.
De plus la trajectoire des particules est elliptique retrograde a la surfacelibre contrairement aux ondes P et SV de surface qui a cette vitesse appa-rente sur la surface donnent lieu a des trajectoires progrades. Experimentalementil est donc tres aise d’identifier une onde de Rayleigh en tracant la trajectoiredes particules. Avec la profondeur, l’onde SV constituant l’onde de Rayleighdevient predominante12 et la trajectoire des particules devient elliptiqueprograde en profondeur.
Une caracteristique importante de l’onde de Rayleigh ; sa vitesse de pro-pagation ne dependant pas de la frequence, l’equation de dispersion (C.81)ne faisant pas apparaıtre ce parametre. Cette onde est dite non dispersive.
12|kpn| > |ksn|

90
kpiksvd
kpd
θsv1θp1
k’i
||kp1||=ω/cp1
||ks1||=ω/cs1
θsv2
θp1
||ks2||=ω/cs2
||kp2||=ω/cp2
Fig. C.8 – Lois de reflexion-transmission refraction sur une interface
C.4 Reflexion sur une interface et transmission
Soit Γ une interface entre deux demi-espaces elastiques Ω1 et Ω2 de ca-racteristiques respectives (ρ1, λ1, µ1) et (ρ2, λ2, µ2), et n la normale a l’inter-face orientee de Ω1 vers Ω2. Soit uiα une onde plane dans le domaine Ω1 devecteur d’onde kαi que l’on choisit incidente sur l’interface Γ (kαi · n > 0)et unitaire. On cherche le champ d’onde reflechi ur dans Ω1 et le champtransmis ut dans Ω2 tels que :
ui + ur = ut sur Γtn(ui + ur) = tn(ut) (C.85)
Comme dans le cas de la reflexion sur la surface libre, les solutions ur et utseront cherchees sous la forme de superposition d’ondes planes :
ur =∑β
aβ1uβ1 ur =∑β
aβ2uβ2 (C.86)
ou les aβ1 et aβ2 sont respectivement les amplitudes des ondes reflechies ettransmises, les uβ1 sont des ondes planes unitaires reflechies dans le domaineΩ1 de vecteur d’onde kβ1 (kβ1 · n < 0) et les uβ2 sont des ondes planesunitaires transmises dans le domaine Ω2 de vecteur d’onde kβ2 (kβ2 ·n > 0).
C.4.1 Loi de Descartes et ondes refractees
Du fait de l’egalite des phases dans les equations (C.85), les composanteshorizontales des vecteurs d’ondes doivent etre egales :
k′β1 = k′β2 = k′α (C.87)

91
La reflexion et la transmission ont donc lieu dans le plan d’incidence et laloi de Descartes sur les angles de reflexion θβ1 et les angles d’emission θβ2
est donc de la forme :
sin θβ1
cβ1=
sin θβ2
cβ2=
sin θαcα
= p′ (C.88)
Cette relation est identique a la relation (C.42) obtenue dans le cas de lasurface libre. En fonction des valeurs des differentes vitesses plusieurs anglescritiques peuvent apparaıtre en plus de l’angle critique θc de reflexion SV-P.En particulier :
– si cp2 > cs1, Il existe un angle θsp2 = arcsin(cs1/cp2) au dessus duquell’onde P transmise pour une onde SV incidente est une onde de surface,
– si cp2 > cp1, il existe un angle θpp2 = arcsin(cp1/cp2) au dessus duquell’onde P transmise pour une onde P incidente est egalement une ondede surface,
– Si cs2 > cs1, il existe un angle θss2 = arcsin(cs1/cs2) au dessus duquell’onde SV transmise pour une onde SV incidente devient une onde desurface.
– Si enfin, cs2 > cp1, il existe un angle θps2 = arcsin(cp1/cs2) au dessusduquel l’onde P et l’onde SV transmises pour une onde P incidente sontdes ondes de surface. Au dela de ces angles critiques ces ondes trans-mises sous forme d’ondes de surface sont appelees des ondes refractees.
C.4.2 Coefficients de reflexion
L’egalite des phases etant verifiees il convient d’assurer l’egalite des am-plitudes. En notant :
M± =
p′ ±√
1− c2sp′2 0
±√
1− c2pp′2 −p′ 0
0 0 1
(C.89)
N± = iρc2sks
κ(1− 2c2sp′2) ±2csp
′√1− c2sp′2 0
±2csp′√
1− c2pp′2 −1 + 2c2
sp′2 0
0 0√
1− c2sp′2
Le systeme (C.85) peut se mettre sous la forme matricielle :
M+1 a
+1 + M−
1 a−1 = M+
2 a+2
N+1 a
+1 + N−1 a
−1 = N+
2 a+2 (C.90)
permettant d’exprimer les amplitudes aet aen fonction des amplitudes desondes incidentes aen inversant le systeme lineaire. On remarque que du fait

92
0 10 20 30 40 50 60 70 80 90−1
−0.5
0
0.5
1
1.5
Angle d’incidence
Am
plitu
de
r11t12
0 10 20 30 40 50 60 70 80 900
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Angle d’incidence
sigm
a/si
gma0
Incidence 1incidence 2
Fig. C.9 – Coefficients de Reflexion-Transmission R11, R22, T12 = T21 surune interface et concentration de contraintes ‖σ(u)‖/‖σ(ui)‖ pour des ondesincidentes SH, (ρ1 = ρ2, cs2 = 3cs1/4)
des expressions des matrices M et N les ondes SH sont decouplees des ondesP-SV. Dans le cas particulier des ondes SH, on obtient simplement :
Rshsh =ρ1cs1
√1− c2
s1p′2 − ρ2cs2
√1− c2
s2p′2
ρ1cs1√
1− c2s1p′2 + ρ2cs2
√1− c2
s2p′2
(C.91)
Tshsh =2ρ1cs1
√1− c2
s1p′2
ρ1cs1√
1− c2s1p′2 + ρ2cs2
√1− c2
s2p′2
(C.92)
les expressions etant plus complexes dans le cas P-SV (cf. [8, 54]).
C.4.3 Amplification et concentration de contraintes
Il est aise de montrer que les amplifications des deplacements restentlimites lorsqu’une onde plane incidente arrive sur une interface. Le cas de lasurface libre donne par ailleurs une borne superieure pour cette amplifica-tion.
Il en est est tout autrement pour les contraintes. Comme le montre lafigure (C.4.2) des concentration de contraintes importantes peuvent appa-raitre en particulier lorsque lıncidence depasse l’angle critique. Ce phenomeneest particulierement important pour l’evaluation des delaminages dans lesmateriaux composites.
C.4.4 Ondes de Stoneley
Dans le cas SH, le terme au denominateur des coefficients de reflexionet de transmission ne peut jamais s’annuler meme pour des valeurs de p′
superieures a 1/cs1 et 1/cs2, c’est-a-dire pour des ondes de surface. Il n’existedonc pas d’ondes guidees le long d’une interface dans le cas SH. Par contre

93
une telle solution peut apparaıtre dans le cas P-SV sous certaines conditionssur les parametres elastiques13. Ces ondes sont appelees ondes de Stoneley[67]. Les expressions des matrices M et N etant en fait independantes de lafrequence, la vitesse de propagation cst de ces ondes est independante de lafrequence, elles sont non-dispersives. Cette vitesse quand elle existe verifie :
cst < min(cs1, cs2) (C.93)
C.5 Couche sur un demi-espace, ondes de Love
Le dernier cas particulier que nous etudierons ici est le cas d’une couched’epaisseur h reposant sur un demi-espace. Ce cas est assez courant dans lapratique aussi bien en sismologie (couche sedimentaire sur du rocher) quedans le domaine mecanique (traitement de surface, collage...). En fait, ceprobleme correspond a la superposition des deux problemes deja etudies :la reflexion sur une surface libre et la reflexion sur une interface. Nous sup-poserons donc connus les coefficients de reflexion sur la surface libre Rsl etles coefficients de reflexion de part et d’autre de l’interface R11 et R22 et detransmission T 12 et T 21 en fonction du nombre d’onde horizontal p′ 14.
Si on definit a±1 (h), les vecteurs des amplitudes des ondes montantesou descendantes dans le domaine Ωi au niveau de l’interface, et a±2 (0) lesvecteurs des amplitudes des ondes incidentes et reflechies sur la surface libre,nous avons les trois equations matricielles suivantes :
a−2 (0) = Rsla+2 (0) (C.94)
a−1 (h) = R11a+1 (h) + T 12a
−2 (h) (C.95)
a+2 (h) = R22a
−2 (h) + T 21a
+1 (h) (C.96)
Si on remarque de plus que :
a+2 (0) = Ta+
2 (h) a−2 (h) = Ta−2 (0) (C.97)
avec :
T =
eihkp2γp2 0 00 eihks2γs2 00 0 eihks2γs2
(C.98)
On obtient en eliminant a+2 (0), a+
2 (h), a−2 (h) et a−2 (0) :
a+2 (h) = (Id −R22TRslT )−1T 21a
+1 (h) (C.99)
a−1 (h) = Ra+1 (h) (C.100)
R = R11 + T 12TRslT (Id −R22TRslT )−1T 21 (C.101)13L’onde de Rayleigh peut etre vue comme un cas limite pour lequel le materiau de la
couche superieure est tres mou et tres leger.14Il est aise de verifier que p′ doit etre constant pour l’ensemble des ondes, la loi de
Descartes se generalisant au cas d’un nombre quelconque d’interface.

94
En remarquant enfin que :
(Id −R22TRslT )−1 =+∞∑n=0
(R22TRslT )n (C.102)
Ce resultat s’interprete simplement en terme de reflexions multiples. Il esta l’origine de deux phenomenes majeurs :
– l’apparition de resonances,– l’apparition d’ondes guidees.
Ces deux phenomenes sont observables dans le cas SH auquel nous nouslimiterons ici.
C.5.1 Resonances
Pour l’etude des phenomenes de resonance, nous nous limiterons au casdes incidences verticales (θ = 0, γs1 = γs2 = 1). Pour les ondes SH, nousobtenons d’apres (C.52) Rsl = 1, d’apres (C.92) et (C.91) en prenant p′ = 0,et en notant κ = (ρ1cs1 cos θi)/(cs2ρ2 cos θ2) le contraste d’impedance, ωo =ωh cos θ2/cs1 la frequence adimensionelle, avec θ2 = arcsin(cs1/cs2 sin θi)l’angle d’incidence dans la couche calcule a partir de la loi de Descartes :
Rsl = 1 R22 = (1− κ)/(1 + κ) R11(κ− 1)/(1 + κ)T12 = 2κ/(1 + κ) T21 = 2/(1 + κ)
ush(0) = (1 + Rsl)a+sh2 = 2a+
sh2 (C.103)
soit
ush(0) =2eiωo
cos ωo + κ−1i sinωoa1+sh1 (C.104)
On notera que bien que le denominateur ne s’annule jamais, il peut devenirtres petit lorsque κ est grand et ωo = π/2 + kπ. Par extension on parlealors de resonance de couche pour ωk = π/2cs1/h(1 + 2k). Notons qu’a cesfrequences, l’amplification par rapport a un demi espace n’est pas infinie,mais egale a κ. De plus cette frequence n’est que tres peu influencee par ladirection d’incidence comme le montre la figure (C.5.1). En effet, du fait dela loi de reflexion, des que le contraste de vitesse devient important (condi-tion necessaire pour faire apparaitre une resonence significative), les ondesdans la couche superieure sont a une incidence proche de la verticale, nemodifiant pas significativement la resonance. Par contre, l’impedance appa-rente du demi-espace ρ1 cos θi/cs1 est significativement reduite par rapport al’impedance de la coucheρ1 cos θ2/cs2, tendant a reduire le phenomene d’am-plification. De ce point de vue, le cas a incidence verticale apparait le plusdefavorable (il est egalement le plus probable dans de nombreuses applica-tions et en particulier en sismologie). Les deux parametres primordiaux dansce systeme sont donc :

95
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20.5
1
1.5
2
2.5
3
frequence
Am
plifi
catio
n
0 degre15 degres30 degres45 degres60 degres75 degres
Fig. C.10 – Amplification au sommet d’une couche d’epaisseur h reposantsur un demi-espace homogene, par rapport a l’amplification sur le demi-espace seul, onde SH a incidence 0, 15, 30, 45, 60, 75 degres pour un contrasted’impedance ρ1cs1 = 3ρ2cs2 (abcisse ωh/(2πcs1)).
– la frequence cs1/4h pour laquelle un quart de longueur d’onde est egala l’epaisseur de la couche,
– le contraste d’impedance κo = (ρ1cs1)/(ρ2cs2) donnant l’amplicationmaximale au sommet de la couche.
C.5.2 Ondes de Love
Des ondes guidees peuvent apparaitre lorsque le determinant de la ma-trice (Id − R22TRslT ) s’annule, car il peut alors exister des solutions enl’absence de champ incident.
Dans le cas SH les calculs peuvent etre menes explicitement puisque lesmatrices sont remplacees par des scalaires. L’equation :
|I −R22TRslT | = 0 (C.105)
devient alors en supprimant les incides s puisque toutes les ondes ici sontdes ondes de cisaillement :
1 = Rshshei2hks2γs2 (C.106)
soit apres quelques manipulations et renormalisation (ρo = ρ1c1/ρ2c2, κo =

96
c1/c2, ωo = hω/c2, p = c2p′) :
ρo√
1− κ2o + κ2
oγ22
κoγ2= i tan(ωoγ2) (C.107)
ou :ρo√
1− κ2op
2
κo√
1− p2= i tan(ωo
√1− p2) (C.108)
Lorsque p < min(1, κ−1o ), le terme de gauche est reel, le terme de droite est
imaginaire pur, il n’y a donc aucune solution possible a l’equation.Lorsquep > max(1, κ−1
o ) l’equation (C.107) devient :
ρo√
κ2op
2 − 1
κo√
p2 − 1= − tanh(ωo
√p2 − 1) (C.109)
Le premier terme est alors positif et le second negatif strictement, il n’existedonc pas de solution.
Deux cas restent a envisager suivant que κo est superieur ou inferieur a 1,c’est-a-dire suivant que la vitesse dans la couche est inferieure ou superieurea la vitesse dans le demi-espace. Lorsque 1 < p < κ−1
o le membre de gauchede l’equation (C.107) est imaginaire pur le membre de droite etant reel, iln’y a donc pas de solution. Enfin, si κ−1
o < p < 1, l’equation devient :
ρo√
κ2o + κ2
oγ22 − 1
κoγ2= tan(ωoγ2) (C.110)
Il est aise de montrer que le membre de gauche est defini pour γ2 dansl’intervalle ]0,
√1− κ−2
o ] strictement decroissante de +∞ a 0. Du fait del’allure de la fonction tangente, on en deduit que quelque soit ωo l’equation(C.107) admet au moins une racine dans cet intervalle. Les solutions decette equation sont appelees ondes de Love [47]. Ces ondes correspondenta des ondes de surface dans le demi-espace homogene et a des ondes devolume dans la couche. Les deplacements sont donc localises dans la couchesuperficielle, permettant ainsi le confinement de l’energie. Pour ωo petit,cette valeur tend vers γs =
√1− κ−2
o , soit une vitesse egale a c1 la vitessedes ondes S dans le demi-espace. Cette vitesse diminue avec ωo et pourωo grand, la premiere racine tend vers γs = 0, soit une vitesse egale ac2 la vitesse des ondes dans la couche. A ωo fixe n le nombre de racinede l’equation de dispersion depend du nombre de branches positives de lafonction tan(ωoγ2) dans l’intervalle, la condition explicite etant :
n = E(ωo√
1− κ−2o /π) + 1 = E(2hf
√1− κ−2
o /c1) + 1 (C.111)
A chaque mode n est donc associe une frequence de coupure egale a :
ωn =(n− 1)πκo√
1− κ−2o
(C.112)

97
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−15
−10
−5
0
5
10
15
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9−15
−10
−5
0
5
10
15
Fig. C.11 – Solutions de l’equation de dispersion des ondes de Love (abcissesγo = γ2/
√1− κ−2
o , κo = 2, ρo = 2) pour deux frequences ωo = π, 5π
A cette frequence la vitesse associee au mode n est egale a la vitesse dans ledemi-espace c1, cette vitesse decroissant au fur et a mesure que la frequenceaugmente pour tendre vers la vitesse dans le couche c2.
Ainsi, contrairement aux ondes de Rayleigh ou de Stoneley, les ondes deLove dependent de la frequence a deux titres, puisque le nombre de modedepend de la frequence ainsi que la vitesse associee. Ces ondes sont dites dis-persives, car pour un signal temporel donne, les amplitudes sur les differentesfrequences contenues dans ce signal vont se propager a des vitesses differentesoccasionnant ainsi une dispersion du signal d’origine au fur et a mesure dela propagation.
C.6 Conclusion
Dans ce chapitre, nous avons etudie la reflexion d’ondes planes elastiquessur des plans. Les phenomenes majeurs mis en evidence sont les suivants :
– Decouplage des ondes P-SV et SH– Conversion d’ondes sur des interfaces– Apparition d’angles critiques et d’ondes de surface– Existence d’ondes guidees non dispersives dans le cas des interfaces
(ondes de Rayleigh et de Stoneley) et dispersives dans le cas de couches(ondes de Love).
Les elements mis en oeuvre tels que la loi de Descartes et les coefficients dereflexion-transmission permettent de generaliser les etudes realisees a des cascomportant un plus grand nombre de couches, et pour lesquels les memestypes de phenomenes peuvent etre attendus. Enfin, il est possible de montrercomme cela a ete fait dans le chapitre II que la solution pour une densitede force quelconque dans un espace homogene peut etre decomposee aumoyen d’une transformation de Fourier en solutions elementaires constituees

98
d’ondes planes. Ainsi, les elements construits dans ce chapitre pourront ilsetre utilisees pour la resolution de ce probleme plus general.
C.7 Exercices
Exercice 3.1 : Exprimer les coefficients de reflexion dans le cas d’unencastrement.

Annexe D
Modeling SSI with a twoDOF system
D.1 SSI with a 2DOF model
The SSI between a building and its elastic foundation is considred bymean of the simple 2 DoF model decribed on figure ??. This model is made oftwo masses : m being the so-colled hanged masse corresponding to the modalmass of the first horizontal eigenmode of the structure the remaining partof the mass of the building mf corresponding to the mass of the foundation.The two masses are linked together with a spring of stifness k being given asfunction of the first natural circular frequency of the building ωo as k = mω2
o .A viscous damper with impedance c = 2mωoζo is in parallel with the springk. Mass mf is connected to the reference soil by mean of a spring kh anda damper ch. uo denotes the displacement of the reference soil, u1 is thedifferential displacement (drift) between m and mf and u2 is the differentialdisplacement of the foundation with respect to the reference soil.
D.1.1 Dynamical system
The dynamical system of this 2 DOF system takes the following genericform :
KU + CU + MU = −M∆uo(t) (D.1)
99

100
where ˙ stands for the time derivative, U = (u1u2)T and1 :
K =(
k 00 kh
)C =
(c 00 ch
)M =
(m mm m + mf
)∆ =
(01
)In order to simplify the analysis the following dimensionless parameters aredefined :
ω2s =
kh(m + mf )ω2
o
α =mf
m + mfζs =
ch(m + mf )ωsωo
= ηaoωs
with ao = ωoR/cs, with R a equivalent radius of the foundation, cs the shearwave velocity in the soil and η a parameter depending on the shape of thefoundation equal to 0.3 for a circular superficial foundation on an homo-geneous half-space with a Poisson’s ratio close to 1/2. The dimensionlesssystem reads :
ω2oKU + 2ωoCU + MU = −M∆uo(t) (D.2)
with :
K =(
1 00 ω2
s/(1− α)
)C =
(ζ 00 ζsωs/(1− α)
)M =
(1 11 1/(1− α)
)D.1.2 Modal analysis
The natural frequency for this system are given by the following charac-teristic equation :
αω4 − (1 + ω2s)ω
2 + ω2s = 0
1We might have introduced a rocking DOF on the foundation U = (u1u2, θH)T leadingto
K =
0@ k 00 kh0 0
1A C =
0@ c 0 00 ch 00 0 cθ/H
2
1AM =
0@ m m mm m+mf mm m m+ Jf/H
2
1A ∆ =
0@ 010
1AAssuming that Jf/H
2 is small compared to m and neglecting this term leads to a matricM of rank 2 only. Taking the difference between the first and the third equation andneglecting damping leads to :
ku1 = kθ/Hθ
Using this expression in the first and second equation leads to U = (u1 + θHu2)T and
k′ = kkθH−2/(k + kθH
−2), c′ = (cKθ + cθk)/2(Kθ + kH2) :
K =
„k′ 00 kh
«C =
„c′ 00 ch
«M =
„m mm m+mf
«∆ =
„01
«

101
as a function of the nodimensional frequency ω = ω/ωo. The solutions aregiven by :
ω21 =
1 + ω2s
2α
(1−
√1− 4αβ2
)(D.3)
ω22 =
1 + ω2s
2α
(1 +
√1− 4αβ2
)(D.4)
β =ωs
1 + ω2s
≤ 12
(D.5)
One can first remark that :
ω1 ≤ min(1, ωs) ≤ max(1, ωs) ≤ ω2
meaning that the two original natural frequencies are always in betweenthe two new ones. Thus accounting for SSI always reduces the first naturalfrequency and increase the second. The associated eigenmodes satisfy :
Φ =
(1 ω2
s
ω22− 1 ≤ 0
0 ≤ 1ω2
1− 1 1− α ≥ 0
)
Showing that the two DoF are in phase for the first mode and out of phasefor the second. Moreover, when ω1 ≤ ωs 1 the first mode is a rigidbody mode of the structure whereas the second mode tends to (−1, 1− α)T
corresponding to a displacement of −α for m and 1− α for mf . Taking thealternate definition of the modes :
Φ =
(0 ≥ ω2
s
ω21− 1 1
1− α ≥ 0 1ω2
2− 1 ≤ 0
)
One observes that when 1 ωs ≤ ω2 the first mode is the mode of thestructure on a rigid foundation whereas the second mode tends to (−1, 1)T
leading the a vanishing displacement for m and an unit displacement formf .
The modal mass are given by :
mi = ΦTi MΦi = ω−4
i (αω2i (ω
2i − 2) + 1)/(1− α)
and the participation factor :
pi = ΦTi M∆/mi = ω2
i (1− αω2i )/(αω2
i (ω2i − 2) + 1)
and the damping :
ζi = ΦTi CΦi/2miωi = ω3
i (ζ(1− α) + (1ω2
1
− 1)2ηaoω2s)/(αω2
i (ω2i − 2) + 1)

102
As a consequence, the maximum acceleration on top the structure inducedby the first mode at the first natural frequency and is given for an unitspectral acceleration by :
|atop| =p1
2ζ1ω21
≈ (1− αω21) inf
(1
2ω31ζ(1− α)
,ω1
2ηaoω2s(1− ω2
1)2
)Whereas the maximum drift takes the same form :
|u1| =p1
2ζ1ω21
It is worth to notice that Some more information can be derived fromthe former expressions depending on the values of α in its range of variation]0, 1[ and ωs. Indeed, for standard buildings ωo = 60π/H = πcb/(2H), cb =120m/s, M+mf = ρbHS and for spread footing circular on an homogeneoussoil kh = 8ρsc
2sR/(2− ν) leading to :
ω2s =
32π3(2− ν)
ρsc2sH
ρbRc2b
for cs > 70, ρs/ρb > 6 and ν > 0 then :
ω2s >
H
R≥ 1
Heavy foundations The limiting value α = 1 corresponding to heavyfoundation with a light building leads to :
ω21 ∈ min(1, ω2
s) ω22 ∈ max(1, ω2
s)
with the two eigenmodes :
Φ ∈
(10
),
(1
1ω2s− 1
)meaning that the structure keeps its natural frequency and mode but theinput acceleration on the foundation is to be modified by the response of 1DoF system consisting of rigid building resting an visco-elastic foundation.It is worth to note that in this case each system is keeping its own dampingratio.
Light foundations When α tends to 0 the foundation becomes lighterand lighter allowing a Taylor expansion of the square root provided thatβ ≤ 1 :
ω2± ∈
ω2s
1 + ω2s
− α
2ω4s
(1 + ω2s)3
,1 + ω2
s
α− ω2
s
1 + ω2s

Annexe E
Rappels de dynamique desstructures
Dans le cadre du probleme d’interaction sol-structure presente au cha-pitre precedent, nous supposons que le mouvement du sol n’est pas signi-ficativement modifie par la structure, cette derniere etant alors astreinte asuivre les deplacements du sol, soit :
div σb(ub) = ρb∂ttub dans Ωb
ub = uf = us = uinc(x, t) sur Σbf (E.1)tb(ub) = 0 sur Γba (E.2)
Dans ce chapitre nous considerons que le champ uinc(x, t) et donc uf (x, t)est explicitement connu et non nul pour t ∈ [0, T ]. Le cas ou on ne disposeque d’informations statistiques sur ce champ est traite en section E.6. Dansun premier temps (section E.1, E.2, E.3), nous supposerons de plus quele champ incident ne varie pas spatialement a l’echelle de la fondation i.e.∂ttu
inc(x, t) = uinc(t) pour tout x ∈ Σsf et t > 0. Il sera alors possible dedefinir le deplacement relatif de la structure par rapport a sa base u∗b =ub − uf verifiant, dans le repere mobile :
div σb(u∗b)−ρbuinc(t) = ρb∂ttu
∗b dans Ωb (E.3)
u∗b = 0 sur Σbf (E.4)tb(u∗b) = 0 sur Γba (E.5)
u∗b(x, 0) = uo(x) dans Ωb (E.6)∂tu∗b(x, 0) = vo(x) dans Ωb (E.7)
Nous montrerons alors que cette solution peut tout d’abord etre ap-prochee par une analyse purement statique dans le cas ou les efforts d’iner-tie peuvent etre negliges (section E.1). Lors qu’une telle approximation n’est
103

104
Ω Γbab
Γbf
uinc
Fig. E.1 – Modele de structure sur fondation rigide
pas realiste, la solution est classiquement decomposee sur la base des modespropres (section E.3) dont une version approchee est presentee a la sectionE.2. Dans ces differents cas, nous donnerons des criteres pour la troncaturede cette base dans le but d’obtenir une solution approchee ainsi que desindications sur les methodes de dimensionnement associees.
Ces methodes seront etendues au cas ou la sollicitation varie spatial-lement sur la fondation (section E.4). Les techniques classiques de dimen-sionnement fondees sur l’utilisation du spectre de reponse seront discuteesdans la section E.7, celles fondees sur des approches en frequence serontpresentees en section E.5.
Toutefois, avant d’aborder ces differents points, nous donnons en sec-tion G quelques rappels mathematiques sur la dynamique des structures. Lelecteur desirant approfondir ce sujet pourra consulter [29, 30, 36, 39, 52, 4].
E.1 Reponse quasi-statique
Lorsque la structure est tres rigide et de masse relativement faible, il estclassique de supposer negligeable les efforts d’inertie associes au deplacementrelatif par rapport a la base. Ainsi pour des conditions initiales homogenesl’analyse se resume a chaque instant t a trouver le champ ub∗o(t) satisfaisant :
div σb(ub∗o)−ρbuinc(t) = 0 dans Ωb (E.8)ub∗o = 0 sur Σbf
tb(ub∗o) = 0 sur Γba (E.9)
qui n’est autre que la reponse statique aux forces d’inertie d’entraınement.Cette analyse peut etre simplifiee et systematisee en decomposant le char-

105
gement uinc sur la base des translations ψkk=1,n, n = 3 :
uinc(t) =n∑k=1
ψkainck (t) = Ψainc(t) (E.10)
et en definissant le tenseur Φo(x) dont les composantes φok sont les reponsesstatiques aux chargements imposes ρbψk :
div σb(φok)+ρbψk = 0 dans Ωb (E.11)φok = 0 sur Σbf
tb(φok) = 0 sur Γba (E.12)
L’approximation ubo prenant alors la forme :
ubo(x, t) = −Φo(x)ainc(t) + uinc(t) (E.13)
E.1.1 Estimation d’erreur
L’erreur commise u∗b−ub∗o en utilisant cette approximation est controleepar le desequilibre ainsi cree i.e. ρb∂ttub
∗o, et peut etre estimee comme le
ratio entre energie cinetique et energie de deformation :
e2 =Cinc
a : Mo
Cinca : Ko
(E.14)
ou les matrices Mφ et Kφ sont respectivement l’operateur d’inertie projetesur les modes statiques φok, l’operateur de rigidite projete sur ces memesmodes et enfin ce meme operateur projete sur la base des modes imposesψk :
[Ko]kk′ =∫
Ωb
σb(ψk) : ε(ψk′)dV (E.15)
[Mo]kk′ =∫
Ωb
ρbψk ·ψk′dV (E.16)
les matrices Cinca et Cinc
a etant respectivement les matrices de covarianceassociees aux accelerations imposees et aux derivees des accelerations im-posees , matrices qui s’expriment egalement en fonction des spectres croises,ainc(ω) etant la transformation de Fourier de ainc, Sinc(ω) l’interspectre deainc et ωl la frequence au dessus de laquelle ce spectre s’annule et en notant

106
que ainc= −iωainc :
Cinca =
∫ T
0ainc ⊗ aincdt = 1/2π
∫ +ωl
−ωlainc ⊗ aincdω
= 1/2π
∫ +ωl
−ωlSinc
a (ω)dω
Cinca =
∫ T
0ainc ⊗ aincdt = 1/2π
∫ +ωl
−ωlω2ainc ⊗ aincdω
= 1/2π
∫ +ωl
−ωlω2Sinc
a (ω)dω
Ainsi,en supposant le spectre d’entree diagonal de la forme :
Sinca (ω) = sinc
α (ω)Diag(c2k)
avec c un vecteur de combinaison des charges, on obtient alors en notantφo = Φoc =
∑nk=1 ckφok, l’estimation :
e ≤ ωmωo
ω2o = ekoemo ω2
m =
∫ +ωl−ωl ω2sinc(ω)dω∫ +ωl−ωl sinc(ω)dω
(E.17)
mo =∫
Ωb
ρbφo · φodV (E.18)
ko =∫
Ωb
σb(φo) : ε(φo)dV =∫
Ωb
ρbψo · φodV (E.19)
ωo etant une pseudo-frequence de resonance et ωm une frequence caracteristiquedu spectre d’acceleration. D’apres (G.15), cette derniere frequence est tou-jours superieure a la premiere frequence de resonance de la structure ωo
1. Lecritere (E.17) indique donc que si la premiere frequence de resonance de lastructure est en dehors de la gamme des sollicitations [0, ωl], alors l’approchepseudo-statique est justifiee. Lorsque ce critere n’est pas verifie, il convientd’effectuer une analyse dynamique.
E.2 Methode de Rayleigh
Avant de presenter l’analyse dynamique complete de la reponse de lastructure, presentons une analyse approchee fondee sur les resultats obte-nus precedemment. Cette methode, appelee methode de Rayleigh est fondeesur l’approximation de ωo par ωo et du mode propre associe a partir des
1Dans la majorite des cas eωo est une bonne approximation de eωo a condition que lemode propre associe ne soit pas orthogonal aux modes statiques φo. Dans ce cas toutefois,cette frequence ne sera pas excitee et l’estimation est donc correcte.

107
ψk φA
−ρψk
φok
Fig. E.2 – Modes imposes, modes statiques et modes propres
reponses statiques Φo. Pour simplifier l’analyse, supposons que la sollici-tation agit suivant une direction unique uinc(t) = ψainc(t), et definissonsle vecteur φo = φo1. Dans ce cadre, l’approximation pseudo-statique de lareponse ub∗o(x, t) est egale a ainc(t)φo. Si le critere (E.17) n’est pas satis-fait, mais dans la mesure ou ωo est une bonne approximation de la premierefrequence propre de la structure, la methode de Rayleigh consiste a suppo-ser que le champ φo reste une bonne approximation de la cinematique dedeformation de cette structure mais que l’evolution temporelle representeepar le coefficient ainc(t) est erronee. Ainsi, on choisit une nouvelle approxi-mation sous la forme :
ub∗o(x, t) = αo(t)φo(x) (E.20)
En multipliant l’equation (3.4) par le champ de deplacement virtuel φo(x)et en integrant sur l’ensemble de la structure, on obtient, apres integrationpar partie et prise en compte des conditions aux limites, l’equation verifieepar αo :
koαo + co∂tαo + mo∂ttαo = −mopoainc(t) (E.21)
mopo =∫
Ωb
ρbψ · φodV = ko (E.22)
avec ko et mo definis respectivement par les equations (E.19) et (E.18)en ne prenant que la partie elastique lineaire du tenseur des contraintes,co etant calcule a partir de la partie dissipative dependant de la vitessede deformation ε. Cette equation correspond a la reponse d’un oscillateursimple dont la solution s’exprime classiquement pour des conditions initialeshomogenes 2 :
αo(t) = −po
∫ t
0
ainc(τ)ωo
e−eζoeωo(t−τ) sin ωo(t− τ)dτ (E.23)
en definissant le taux d’amortissement ζo = co/(2moωo).2Dans le cas de conditions initiales on se reportera aux expressions (E.32)(E.33).

108
E.2.1 Estimation d’erreur
L’erreur u∗b −ub∗o est classiquement (cf. section G.3) estimee a partir duresidu r dont on remarque, en l’absence d’amortissement, qu’il appartient ausous espace vectoriel engendre par le mode de corps rigide ψ et la deformeestatique φo :
r = div σb(ub∗o)− ρb(aincψ + ∂ttub∗o)
≈ ρbaincpoφ−ψ (E.24)
Une premiere estimation consiste a multiplier cette equation par ψ et enintegrant sur Ωb, on calcule Rd, la composante suivant ψ de la resultante dece desequilibre3. Cette resultante s’exprime en fonction de ainc :
Rd = −∫
Ωb
r ·ψdV = (Mb − mop2o)a
inc (E.25)
En multipliant cette resultante par le deplacement impose sur la fondation,on en deduit donc que son travail est majoree par le travail des forces d’iner-tie : ∫ T
oRd(t)uinc(t)dt =
Mb − mop2o
Mb
(Mb
∫ T
0(uinc)2dt
)(E.26)
Le quotient du membre de droite correspond au pourcentage de la masserepresente par le mode φo. Il s’agit d’un cas particulier d’un critere classiquede tronquature de la base modale comme nous le verrons par la suite. Enutilisant la meme technique, on montre que l’erreur est majoree par le ratioentre la premiere frequence propre ”libre-libre” non nulle 4 et la frequencecaracteristique du signal ωm.
La seconde estimation d’erreur consiste a calculer l’erreur en energiedu relevement statique associee a ce residu, ce qui revient a calculer lerelevement statique φ1 associe au champ d’effort ρbφo, puisque, par definition,l’erreur associee au terme proportionnel aψ est nulle (cf. section G.3 equationG.9).
E.3 Decomposition spectrale
Classiquement, le champ de deplacement dans la structure u∗b peut etredecompose sur la base des modes propres de vibration ωA,ϕA(x)A∈Nverifiant :
div σb(ϕA) = −ρbωA2ϕA dans Ωb (E.27)
ϕA = 0 sur Σbf
tb(ϕA) = 0 sur Γba (E.28)3On montre aisement qu’il s’agit egalement de la resultante sur la fondation des
contraintes associees au champ d’erreur e.4Condition de surface libre sur Σbf .

109
sous la forme :
u∗b(x, t) =∑A∈N
αA(t)ϕA(x) (E.29)
αA(t) =
∫Ωb
ρbu∗b ·ϕAdV∫
ΩbρbϕA ·ϕAdV
(E.30)
Dans l’hypothese d’un amortissement associe, les coefficients de participationmodaux αA verifient les equations differentielles ordinaires suivantes :
ω2A(1− ζ2
A)αA + 2ζAωAαA + αA = −pTAainc(t) (E.31)
αA(0) = αAo ≡∫
Ωb
ρbuo ·ϕAdV (E.32)
αA(0) = αA1 ≡∫
Ωb
ρbvo ·ϕAdV (E.33)
pA =
∫Ωb
ρbϕA ·ΨdV
mA(E.34)
mA =∫
Ωb
ρbϕA ·ϕAdV (E.35)
pA etant un vecteur dont les composantes pAk sont les facteurs de partici-pation modaux pour chacun des chargements elementaires ψk, ζA le tauxd’amortissement associe au mode propre, ϕA, αAo et αA1 les conditions ini-tiales verifiees par ces coefficients. Classiquement, ces coefficients sont egauxa (cf. section E.2) :
αA(t) = αAo cos ωAt +αA1
ωAsinωAte−ζAωAt
− pTA
∫ t
0
ainc(τ)ωA
e−ζAωA(t−τ) sinωA(t− τ)dτ (E.36)
E.3.1 Troncature
La troncature de la serie (E.29) est conditionnee par le contenu enfrequence du signal d’entree ainc(t). Pour analyser ce comportement consideronsun amortissement nul, un signal monochromatique ainc(t) = ainc(ω)sinωtavec ω 6= ωA et des conditions initiales particulieres αAo = 0 et αA1 =−2pA · ainc(ω)ωA/(ω2−ω2
A). La solution αA est alors harmonique et donneepar :
αA(t) = −pTAainc(ω)sinωt
ω2A − ω2
(E.37)

110
Soit a la limite quand ω << ωA :
αA(t) ≈ αoA(t) ≡−pTAainc(t)
ω2A
(E.38)
D’apres (E.30)(E.29) on deduit que :
uinc(t) = −∑A∈N
(pTAainc)ϕA(x) (E.39)
et donc d’apres (E.27), le champ φo =∑
A αoAϕA est le relevement statiquedes forces d’inertie defini a la section E.1. Ainsi, en admettant que le spectreassocie au chargement ainc(t) est limite en frequences (ainc(ω > ωl) = 0),il est licite d’utiliser l’approximation (E.38) pour tronquer la sommation(E.29) sous la forme :
ub(x, t) =N∑A=1
αA(t)ϕA(x)−Φ⊥o (x)ainc(t) + uinc(x, t)
Φ⊥o = Φo −N∑A=1
ϕA ⊗ pTAω2A
(E.40)
Φ⊥o etant la projection de Φo sur l’orthogonale de l’espace engendre par lesN premiers vecteurs propres.
E.3.2 Estimation d’erreur
Reprenons la technique utilisee pour l’estimation d’erreur dans le casde la serie tronquee. Les residus s’expriment alors en ignorant les termesd’amortissement :
r = −Φ⊥o ρbainc (E.41)
Le travail de ce residu sur un element de la base tronquee des modes propress’annule et une premiere estimation consiste a le faire travailler sur les modesΦ⊥o conduisant a l’indication d’erreur :
‖r‖V ′ ≈ ωlinfk ωok
≤ ωlωN+1
(E.42)
les ωok etant les valeurs propres du systeme :
Koαo = ω2Moαo
[Ko]kk′ =∫
Ωb
σbe(φ⊥ok) : ε(φ⊥ok′)dV (E.43)
[Mo]kk′ =∫
Ωb
ρbφ⊥ok · φ⊥ok′dV (E.44)

111
E.3.3 Extension de la base modale
Le resultat precedent nous conduit a une extension naturelle de la methodede Rayleigh au cas de la decomposition modale consistant a ajouter lesmodes statiques φ⊥ok a la base modale. Ces modes ne sont pas orthogonauxentre eux, mais ils sont, par construction, orthogonaux aux modes propresϕA. Il est possible de les orthogonaliser, les pseudo-frequences propres as-sociees ωok etant definies ci-dessus. Notons que ces nouveaux modes ne sontpas des modes propres de la structure mais seulement d’un modele reduit ca-racterise par les matrices Ko et Mo. On deduit en particulier des proprietesdu quotient de Rayleigh que les pseudo-frequences propres sont plus grandeque la N + 1ieme frequence propre de la structure ωN+1 (cf. section G.4).Ce resultat montre ainsi que l’utilisation de ces modes peut conduire a unemeilleure approximation que l’utilisation de modes propres supplementaire.
L’approximation du champ u∗b prenant alors la forme :
u∗b(x, t) =N∑A=1
αA(t)ϕA(x) +n∑k=1
φ⊥ok(x)αok(t)
=N+n∑i=1
αi(t)φi(x) (E.45)
Les coefficients αA restant identiques et le vecteur des coefficients αok satis-faisant :
Koαo −Coαo + Moαo = −Mooainc (E.46)
[Co]kk′ =∫
Ωb
σbd(φ⊥ok) : ε(φ⊥ok′)dV (E.47)
[Moo]kk′ =∫
Ωb
ρbψk · φ⊥ok′dV = [Ko]kk′ (E.48)
αok′(0) = αAo ≡∫
Ωb
ρbuo · φok′dV (E.49)
αok′(0) = αA1 ≡∫
Ωb
ρbvo · φok′dV (E.50)
ce systeme etant diagonal lorsque la base est reorthogonalisee. Par contreon remarque qu’a priori la matrice Moo n’est pas diagonale induisant uncouplage entre tous les modes de chargement ψk et tous les modes statiquesφ⊥ok′ .
En etendant les resultats obtenus lors de l’analyse de la methode deRayleigh on obtient en negligeant les termes d’amortissement l’expression

112
du nouveau residu :
r = N∑A=1
ϕApTA +n∑
k′=1
φ⊥okpTok − ρbΨainc
= N+n∑i=1
ϕipTi −Ψρbainc (E.51)
En particulier, en utilisant comme champ de deplacement virtuel les modesΦ, on retrouve le critere sur le pourcentage de masse represente par la basemodale :
e ∝‖Mψ −MψφM−1
φ MTψφ‖
‖Mψ‖
[Mψ]kk′ ≡ [Mb]kk′ =∫
Ωb
ρbψk ·ψk′dV
Mψφ =
:
mApA:
Mψφo
(E.52)
Mφ =(
Diag(..,mA, ..) 00 Mφo
)(E.53)
Notons toutefois qu’il ne s’agit ici que d’une indication d’erreur permettantd’evaluer la part de la masse non mise en mouvement. Une indication plusprecise consiste a prendre le relevement statique du residu. Ce dernier etantune combinaison lineaire des modes Ψ, ϕA et Φ⊥o , on en deduit que seulle relevement des Φ⊥o presente un interet5. Cette procedure peut etre itereejusqu’a un seuil de convergence juge convenable. On remarquera egalementqu’en cas de fort amortissement, les termes associes ne peuvent plus etreignores dans l’expression du residu.
E.4 Structure multi-supportee
Nous avons jusqu’a present considere le cas ou les deplacements im-poses par le seisme etaient des translations. Lorsque la fondation est degrande taille et relativement flexible, de telles hypotheses de peuvent etreconservees. Ce cas de figure se presente egalement lorsque la structure aplusieurs fondations, un pont par exemple. Lorsque le sol est suffisammentrigide (cette hypothese sera justifiee plus loin) il est raisonnable de supposerque la fondation suit le mouvement du sol (cf. equation (E.1)). Sans nuire a
5Les relevements statiques des Ψ sont les modes Φo deja dans la base, les relevementsdes modes ϕA sont par definition ces memes modes au coefficient −1/ω2
A pres.

113
la generalite, supposons tout d’abord que le champ impose sur la fondationpeut se decomposer sous la forme :
uf (x, t) =n∑k=1
ψk(x)cinck (t) = Ψ(x)cinc(t) sur Γbf (E.54)
que cette decomposition soit issue d’une discretisation par elements finis dela frontiere Γbf (lesψk(x) sont alors de fonctions de bases), d’une decompositionspectrale (diagonalisation de la covariance de uf ), d’une decomposition surles mouvements de corps rigide de plusieurs fondations ou bien encore dela decomposition proposee en (E.10) dans le cas d’une unique fondationrigide6. Les modes ψk(x) seront appeles modes d’interface, et nous allonsconstruire une extension continue ces modes dans Ωb, comme nous l’avionsfait dans le cas des translations imposees en (E.10). Afin de ne pas alour-dir les notations ces extensions seront egalement denommees ψk. Bien sur,une telle extension n’est pas unique, mais nous la supposerons fixee une foispour toute dans suite7. Notons qu’une extension pratique est le relevementstatique verifiant en plus de la condition cinematique sur Γbf :
div σb(ψk) = 0 dans Ωb (E.55)tb(ψk) = 0 sur Γba (E.56)
C’est en pratique le choix qui a ete fait en (E.10) lorsque le mouvementde translation de la fondation a ete etendu a l’ensemble de la structure.Nous pouvons a present definir un pseudo mouvement d’entraınement uinc
b
dans Ωb, ainsi qu’un pseudo champ de deplacement relatif du batiment parrapport a sa base sous la forme :
uincb (x, t) =
n∑k=1
ψk(x)cinck (t) = Ψ(x)cinc(t) (E.57)
u∗b(x, t) = ub(x, t)− uincb (x, t) (E.58)
uincb (x, t) = Ψ(x)∂ttcinc(t) = Ψ(x)ainc(t) (E.59)
6Dans le cadre d’une approximation, la decomposition (E.54) peut s’obtenir par pro-jection sur la base Ψ(x), les coefficients cinc(t) etant definis par :
cinc(t) = A−1ψ
ZΣbf
Ψ(x) · uf (x, t)µ(x)dS(x) Aψ =
ZΣbf
Ψ(x) ·Ψ(x)Tµ(x)dS(x)
µ(x) etant une densite ad hoc, une densite massique par exemple.7Cette demarche est classiquement utilisee pour prendre en compte des champs de
deplacement imposes dans une methode d’elements finis.

114
ψk
Fig. E.3 – Relevement statique des modes d’interface
Dans le cas ou les champs ψk sont des relevements statiques8, le champ u∗bverifie alors :
div σb(u∗b)−ρbuinc = ρb∂ttu
∗b dans Ωb
u∗b = 0 sur Σbf
tb(u∗b) = 0 sur Γbau∗b(x, 0) = uo(x) dans Ωb
∂tu∗b(x, 0) = vo(x) dans Ωb (E.60)
A partir de cette generalisation, les differentes approximations realisees dansle cas d’une fondation rigide sont directement exploitables et nous les repren-drons ici sans demonstration.
E.4.1 Solution pseudo-statique
Dans le cas d’une structure relativement rigide, la solution est exprimeecomme une combinaison lineaire des modes statiques φok induit par desforce d’inertie ρbψk :
ubo(x, t) = −Φo(x)ainc(t) + Ψ(x)cinc(t) dans Ωb (E.61)
div σb(φok)+ρbψk = 0 dans Ωb
φok = 0 sur Σbf
tb(φok) = 0 sur Γba (E.62)8Dans le cas contraire, l’equation d’equilibre prend la forme
div σb(u∗b)+div σb(u
incb)− ρb · uinc = ρb∂ttu
∗b

115
L’erreur associee s’exprime comme le rapport entre l’energie cinetique negligeeet l’energie de deformation totale :
e2 ≈Cinc
a : Mo
Cinca : Ko + Cinc : Kb
(E.63)
ou les matrices Mo, Ko et Kb sont respectivement l’operateur d’inertie pro-jete sur les modes statiques φok, l’operateur de rigidite projete sur ces memesmodes et enfin ce meme operateur projete sur la base des modes imposesψk :
[Kb]kk′ =∫
Ωb
σb(ψk) : ε(ψk′)dV (E.64)
les matrices Cinc, Cinca et Cinc
a etant respectivement les matrices de cova-riance associees aux deplacements imposees, aux accelerations imposees etaux derivees des accelerations imposees , matrices qui s’expriment egalementen fonction des spectres croises :
Cinc = = 1/2π
∫ ωl
0Sincdω (E.65)
Cinca = 1/2π
∫ ωl
0ω4Sincdω (E.66)
Cinca = 1/2π
∫ ωl
0ω4Sincdω (E.67)
Une estimation tres grossiere consiste a remarquer que la matrice Kbo peutne pas etre inversible dans le cas de mouvements de corps rigide autorisantdonc a negliger le second terme du denominateur. En remarquant de plus que‖Cainc‖ ≤ ω2
l ‖Cinc‖, on en deduit e ≤ ωlωo
, ωo etant la premiere frequencepropre de la structure sur base fixe. Cette derniere peut etre approcheecomme dans la section E.1 moyennant des hypotheses sur les spectres croises.
Lorsque ce critere n’est pas verifie, il convient de s’orienter vers unemethode modale utilisant soit des pseudo-modes propres comme dans lamethode de Rayleigh (section E.2) soit une base combinee de modes propreset de modes statiques.
E.4.2 Decomposition modale
Les resultats obtenus dans le cadre de la methode modale mono sup-port sont directement generalisables au cas multi-supporte dans le cas oules modes ψok sont construits comme des relevements statiques. On a enparticulier :
ub(x, t) =N∑A=1
αA(t)ϕA(x) +n∑k=1
φ⊥ok(x)αok(t) + Ψ(x)cinci (t)(E.68)

116
Les coefficients αA etant definis par l’equation (E.36) et Φ⊥o par l’equation(E.40), le vecteur des facteurs de participation pA etant defini en (E.34).Les estimations d’erreur sont identiques a celles donnees dans le cas mono-support.
E.5 Resolution en frequences
Nous aborderons rapidement ici la methode de resolution en frequenceen rappelant que les equations traitees jusqu’ici dans le domaine temporelpeuvent etre traitees de facon equivalente dans le domaine des frequences partransformation de Fourier. L’approche en frequence permet de plus de traiterle cas de chargements harmoniques uinc(x, t) = uinc(x) sinωt. Enfin nousverrons dans la section E.6 que cette approche est particulierement adapteeaux sollicitations aleatoires decrites en terme de spectre de puissance.
Les differents champs definis jusqu’a present sur l’intervalle [0,+∞[ sontetendus par 0 sur ]−∞, 0[. Il est alors possible de definir leur transformee deFourier (cf. annexe H), notees ici avec . Nous supposerons afin de simplifierl’analyse que les conditions initiales sont nulles afin d’eviter le traitement dessingularites a l’origine (cf. ??). La transformation de Fourier des equationsd’origine fournit les equations verifiees par le champ ub, la transformationde Fourier de ub(x, t) en fonction de uinc, la transformation de Fourier duchamp incident uinc(x, t) :
div σb(ub) = −ρbω2ub dans Ωb
ub = uf = uinc(x, ω) sur Σbf (E.69)tb(ub) = 0 sur Γba (E.70)
La meme procedure peut etre adoptee pour l’ensemble des equations. Onremarquera en particulier que dans la mesure ou la dependance temporellea ete concentree dans les coefficients αA, αo et cinc, seuls ces termes sontmodifies. En particulier, l’equation (E.31) verifiee par les coefficients de par-ticipation modaux devient une equation algebrique :
zA(ω)αA ≡ mAω2A(1− ζ2
A) + 2iωζAωA − ω2αA = ω2mApTAcinc(E.71)Zo(ω)αo ≡ Kφo − iωCφo − ω2Mφoαo = ω2MT
ψφo cinc(E.72)

117
10−1
100
101
10−2
10−1
100
101
102
ω/ωo
α o/βin
c
ζ=.01ζ=.05ζ=.1 ζ=.2
10−1
100
101
10−2
10−1
100
101
102
ω/ωo
α o/αin
c
ζ=.01ζ=.05ζ=.1 ζ=.2
Fig. E.4 – Deplacement en frequence d’un oscillateur simple de frequencepropre ωo et de taux d’amortissement ζo rapportee au deplacement impose(hA a gauche) ou a l’acceleration imposee (hA/ω2 a droite)
qui admet une solution explicite α = (.., αA, ..., αo, αψ) :
αA = hTA(ω)cinc
αo = Ho(ω)cinc
αψ = hψ(ω)cinc
hA =ω2pA
ω2A(1− ζ2
A) + 2iωζAωA − ω2
Ho(ω) = ω2Z−1o (ω)MT
ψφo
hψ = 1 (E.73)
En particulier, hA est caracteristique de la reponse en frequence d’un osci-lateur simple representee sur la figure E.5.
Cette expression introduite dans la decomposition generale du champ dedeplacements (E.68) donne alors :
ub(x, ω) = U b(x, ω)cinc =n∑k=1
ubk(x, ω)cinck
U b(x, ω) =N∑A=1
ϕA(x)hA(ω) + Φ⊥o (x)Ho(ω) + Ψ(x) (E.74)
=N+2n∑i=1
φi(x)hi(ω) = Φ(x)H(ω) (E.75)
et on remarquera que les champs ubk sont les approximations sur la base

118
modale retenue d’un champ verifiant au niveau continu :
div σb(ubk) = −ρbω2ubk dans Ωb
ubk = ψk sur Σbf (E.76)tb(ubk) = 0 sur Γba (E.77)
Une decomposition similaire sera utilisee pour traiter l’interaction sol-structure.
Impedance de la structure L’approche en frequence permet de donnerune expression explicite de l’action exercee par le batiment sur sa fonda-tion. L’impedance associee Kbd est ainsi definie comme le travail virtuelsur un mode d’interface ψk′ des efforts exerces sur la fondation lorsqu’undeplacement ψk lui est impose. D’apres les resultats precedents, nous avons :
[Kbd]kk′ =∫
Σsf
tb(ubk) ·ψk′dS
=∫
Ωb
σb(ubk) : ε(ψk′)dV − ω2
∫Ωb
ρbubk ·ψk′dV
= [Kb]kk′ − ω2[Mb + Mab (ω)]kk′ (E.78)
[Mab (ω)]kk′ = ω2MψφZ−1
φ (ω)Mφψ (E.79)
Zφ =(
Diag(.., zA, ..) 00 Zo
)Le terme Ma
b (ω) est souvent appele masse ajoutee de la structure dans la me-sure ou il constitue une contribution complementaire a la matrice de masseMb. On notera toutefois que ce terme de ’masse ajoutee est trompeur carM∗
b(ω) est a valeurs complexes et depend fortement de la frequence. En par-ticulier si l’on s’interesse aux premiers termes provenant de la contributiondes modes propres, la dependance en frequence est caracterisee par le termeω2/(ω2
A(1−ζ2A)+2iωζAωA−ω2) est imaginaire pur et maximal en module au
droit des frequences propres de la structure. Il joue alors le role d’un amor-tissement car a ces frequences la structure resonne et l’energie est ”aspiree”vers les modes de resonance. Par contre, lorsque la frequence courante ω estsuperieure a une frequence propre ωA, le terme correspondant est approxima-tivement un reel negatif, conduisant a une ”masse ajoutee negative”. Ainsi,aux hautes frequences, la fondation ne ”voit” pas l’ensemble de la masse dela structure, mais seulement la masse qui n’est pas mobilisee par les modespropres. Une autre interpretation consiste a voir ce terme comme un termede rigidite traduisant le fait qu’au dela de sa frequence de resonance le degrede liberte associe au mode propre est ”bloque”, induisant ainsi une force derappel sur la fondation. Enfin, pour ω ≤ ωA le terme de masse ajoutee estegal a un reel positif dont l’amplitude tends rapidement vers 0 quand lafrequence s’annule.

119
E.6 Sollicitations aleatoires
Dans de nombreuses applications et en particulier en genie parasismique,la sollicitation uinc(x, t) n’est pas connue explicitement a la fois vis a vis deson evolution spatiale ou temporelle.
E.6.1 Alea temporel
Dans un premier temps nous supposerons son evolution spatiale connue,et nous nous interesserons uniquement a sa variabilite temporelle. Ceci nousramene tout d’abord a l’etude des coefficients ainc(t) consideres comme desprocessus aleatoires et ensuite a la reponse ub(x, t) considerees egalementcomme un processus aleatoire dependant lineairement de ainc(t).
Caracterisation du chargement Dans l’hypothese Gaussienne, ces pro-cessus sont entierement caracterises par leurs moyennes ainc
m (t) = E(ainc(t)),et leurs covariances Cinc(t, t′) = E(ainc(t) ⊗ ainc(t′), E(.) etant l’esperancemathematique. Il est classique de les considerer stationnaires, leur moyennedevenant independante du temps et leur correlation fonction de τ = t′ − t.Cette hypothese permet de plus de donner un moyen de calculer cettemoyenne et cette correlation en utilisant une seule trajectoire du proces-sus. En effet en faisant une hypothese d’ergodicite, on obtient en premiereapproximation 9 :
aincm = 1/T
∫ T
0ainc(t)dt (E.80)
Cinc(τ) = 1/(T − τ)∫ T−τ
0ainc(t)⊗ ainc(t + τ)dt (E.81)
a la condition que le temps T de sommation soit grand devant le temps decorrelation tinc
c , soit :
T >> tc (E.82)
tincc =
∫ T0 Cinc(τ)dτ
Cinc(0)=
2πCinc(0)∫∞−∞ Cinc(ω)dω
=2π
ωm(E.83)
critere qui pourra etre verifie a posteriori.Usuellement le chargement sismique est suppose a moyenne nulle ainc
m =0 et on confondra donc covariances et correlations qui seront entierementcaracterises par leurs transformees de Fourier : la matrice inter-spectrale depuissance Sinc. Par linearite de la transformation de Fourier cette matrice
9Des estimations plus avancees sont donnees dans [64], elle permettent en particulierde caracteriser des processus non-stationnaire par fenetrage du signal.

120
inter-spectrale de puissance peut etre calculee directement a partir de latransformee de Fourier d’une ou plusieurs realisations de ainc(t) :
Sinc(ω) =∫ +∞
−∞Cinc(τ)eiωτdτ = E(ainc ⊗ ainc) ≈ ainc ⊗ ainc(E.84)
On retrouve ici l’interet de l’approche en frequence, car si un signal sis-mique apparaıt aleatoire en temps, son spectre de puissance est une donneequasi deterministe et donc propre a etre utilisee pour le dimensionnement10.Notons que generalement seule la diagonale de Sinc(ω) est accessible et l’onsuppose alors nuls les termes extradiagonaux. Ce point a pour effet de rendrela direction des vecteurs ainc
l independants de la frequence 11. Lorsque l’en-semble de la matrice Sinc(ω) est connue, cette matrice etant par definitionhermitienne, on pourra la diagonaliser et la representer a l’aide de ses vec-teurs propres ainc
l (ω) que l’on normalisera par rapport a Sinc(ω) :
Sinc(ω) =∑l
aincl ainc
l
T(E.85)
On deduit egalement de cette decomposition de la transformee de Fourierdes processus ainc(t) :
ainc(ω) =∑l
aincl (ω)eiθl (E.86)
θl etant dans le cas stationnaire des variables aleatoires decorellees et dedensite de probabilite constante sur [0, 2π[.
Caracterisation de la reponse A l’aide de la decomposition effectueesur le chargement, nous allons montrer qu’il est possible de se ramener a uneserie d’analyses deterministes dans le domaine des frequences pour chacunedes sollicitations ainc
l (ω). Rappelons tout d’abord quelques resultats clas-siques : le champ ub dependant lineairement du chargement uinc, lui-memerepresente par une somme de processus Gaussiens stationnaire independantset de moyenne nulle, nous savons alors [64] que ub est egalement un pro-cessus Gaussien stationnaire de moyenne nulle. Il sera donc entierement ca-racterise par sa covariance Cub(x,x′, t− t′) ou par sa densite inter-spectrale
10Ce n’est pas le cas pour sa transformee de Fourier dont la phase est aleatoire dansl’hypothese stationnaire. Ceci n’est plus vrai dans le cas instationnaire et on pourra relierla correlation de la phase en frequence a la duree du signal.
11Ce point est souvent critique par les sismologues qui estiment que le mode de propaga-tion des ondes dans le sol induit des correlations fortes entre les differentes composantes duseisme, translation dans le sens de propagation pour les ondes P, dans le sens perpendicu-laire pour les ondes S, trajectoires elliptiques pour les ondes de surface. Pour cette raisonet egalement de fait de l’hypothese de stationnarite, ils estiment preferable de travailleravec des enregistrements reels et non simules

121
de Sub(x,x′, ω). On en deduira en particulier l’expression de l’ecart-type dela reponse en un point x donne et dans une direction ej definie par :
σ(x, ej)2 = [Cub ]jj(x,x, 0) = 2∫ +∞
0[Sub ]jj(x,x, ω)dω (E.87)
dont on deduira des statistiques sur les maxima atteints par la reponse dansun intervalle [0, T ] (cf. [70, 64]).
Toutefois, d’un point de vue pratique, ces expressions sont difficilementexploitables car la densite Sub reste de tres grande taille (elle est definiessur Ωb × Ωb × R). On tirera alors parti de la decomposition de la reponsede la structure sur la base des modes propres et des modes statiques Φ, enetudiant la covariance des coefficients de participation sur ces modes noteeCα(t − t′) ou la densite inter-spectrale associee Sα(ω). On en deduira ladecomposition suivante de σ(x, ej) :
σ2 =∑ii′
φij(x)φi′j(x)γii′σiσi′ (E.88)
σ2i = 2
∫ +∞
0[Sα]iidω (E.89)
γii′ =2∫ +∞0 [Sα]ii′dω
σiσi′(E.90)
ou les σi sont les ecarts-type sur la reponse des coefficients de participationmodaux et les γii′ sont les coherences croisees entre ces differents coefficients.Ces coherences croisees peuvent etre approchees a partir de l’expression desfonctions de reponse en frequence de chacun des oscillateurs. On remarquealors que les coefficients de correlations γii′ sont faibles pour des modes ayantdes frequences propres eloignees. En effet, la covariance sur les coefficientsde participation modaux Sα et la covariance de la reponse de la structureSub(x,x′, ω) s’expriment :
Sα(ω) =∑l
Sαl (ω) (E.91)
Sαl (ω) =
(Hainc
l
) (Hainc
l
)T(E.92)
Sub(x,x′, ω) =∑l
Subl (x,x′, ω) (E.93)
Subl (x,x′, ω) =
(U b(x, ω)ainc
l
)(U b(x′, ω)ainc
l
)T(E.94)
Dont ou peut egalement deduire l’expression suivante de l’ecart-type :
σ2 =∑lii′
φij(x)φi′j(x)γlii′σilσi′l (E.95)
Montrant que les composantes du chargement se combinent de facon qua-dratique dans l’evaluation de la reponse. On retrouvera ce resultat dans ledimensionnement.

122
E.6.2 Alea spatial
Nous avons jusqu’a present considere que seule la composante temporelledu champ incident etait aleatoire. Toutefois les mesures effectuees sur sitemontre que ce champ varie egalement spatialement de facon aleatoire. Cetalea est caracterise par la correlation spatiale en frequence Sinc(x,x′, ω) quel’on suppose generalement homogene et isotrope a la surface du sol, soit[26] :
Suinc(x− x′, ω) = Sinc
o (ω)eiωcm
dm·(x−x′)γ(‖x− x′‖, ω) (E.96)
Le premier terme Sinco (ω) etant identique a la matrice interspectrale etudiee
precedemment et que nous supposerons ici diagonale. Le second terme est ca-racteristique d’une propagation moyenne dans la direction dm a la vitesse ap-parente cm sur la surface. Le dernier terme γ(‖x−x′‖, ω) est caracteristiqued’une variabilite spatiale isotrope dont le modele le plus couramment utiliseest Gaussien :
γ(r, ω) = e−η ω
2r2
c2m (E.97)
Comme nous l’avons vu, l’analyse de la reponse de la structure est effectueeen decomposant le champ de deplacement de la fondation sur une basede mode Ψ donnee. Lorsque le champ incident est suppose aleatoire, ilconvient donc de caracteriser les processus aleatoires cinc en fonction descaracteristiques du champ incident donnees en (E.96). On notera que cettecaracterisation est immediate dans le cas d’appuis repartis (cas des pontspar exemple), alors que pour des appuis continus il est necessaire d’avoir re-cours a une projection. Se pose alors la question de la determination d’unebase optimale ainsi que l’analyse de l’erreur de projection associee.
Projection La methode de projection permet d’obtenir les coefficients cinc
sous la forme :
Acinc(t) =∫
Σsf
uinc(x, t) ·Ψ(x)dS (E.98)
[A]kk′ =∫
Σsf
ψk(x) ·ψk′(x)dS (E.99)
[ATSincA]kk′ =∫
Σsf
∫Σsf
ψTk (x)Suinc(x− x′, ω)ψk′(x
′)dS(x)dS(x′)(E.100)
Cette projection correspond a un filtrage spatial du processus uinc, qui,dans le cas particulier ou seuls les modes de translation sont pris en compte,

123
revient a prendre la moyenne sur la fondation :
cinc(t) = 1/SΣsf
∫Σsf
uinc(x, t)dS (E.101)
[Sinc]kk′ = 1/S2Σsf
∫Σsf
∫Σsf
Suinc(x− x′, ω)dS(x)dS(x′) (E.102)
Choix de la base La methode de construction de la base des modes Ψ estgeneralement conditionnee par les grandeurs que l’on desire approcher. Sil’ecart type de la reponse est la donnee dimensionnante, l’expression (E.89)montre que seule est importante la valeur moyenne de Sinc sur la plagede frequence et donc par extrapolation la valeur moyenne de Suinc
. Nouschoisirons donc de diagonaliser l’operateur integral Cuinc
o defini par :
Cuinc
o ψ =∫
Σsf
Cinco (x,x′)ψ(x)dS(x) (E.103)
Cinco (x,x′) =
∫ +∞
−∞Suinc
(x− x′, ω)dω (E.104)
dont on retiendra les n premiers vecteur propres ψk et premieres valeurspropres λk. Par construction, cet operateur est reel symetrique et ses va-leurs propres tendent vers 0 donnant ainsi un critere de troncature de laserie. On pourra ajouter a ce critere un second critere fonde sur la pseudo-frequence propre associee a ces modes et obtenue par diagonalisation dusysteme matriciel :
Kψc = ω2Mψc (E.105)
Le principal avantage de cette decomposition est d’assurer que les coefficientscinc(t) sont decorreles.
E.7 Dimensionnement
En terme de dimensionnement, seules les valeurs maximales des champssont a priori interessantes et en particulier les valeurs maximales des contraintes.Dans une hypothese d’elasticite lineaire, ces valeurs sont donc reliees auxdeformations et donc au champ de deplacements differentiels par rapport aun champ de deplacement de corps rigide.
E.7.1 Cas pseudo-statique
Dans l’hypothese quasi-statique, ce champ est proportionnel aux accelerationsimposees dans le cas mono-support. La donnee dimensionnante est doncl’acceleration maximale. On definira donc une acceleration maximale de di-mensionnement sous la forme d’un vecteur amax (cf. regles PS92).

124
Lorsque les deplacements a la base de la structure ne sont pas en phase,les deplacements dependent egalement des deplacements imposes, ces der-niers pouvant avoir un caractere dimensionnant pour une structure rela-tivement rigide. Notons de plus l’effet cumulatif pouvant apparaıtre, lesaccelerations et les deplacements etant maximaux aux memes instants (c’estle cas pour un chargement sinusoıdale). Ce point justifie la diagonalisationde la covariance du champ incident presentee ci-dessus qui justifie a prioriune combinaison quadratiques des maxima associes a chaque chargementcinck ψk. On aura ainsi besoin d’une acceleration maximale dans chaque di-
rection ainsi qu’un deplacement maximal.
E.7.2 Cas Dynamique
Afin d’analyser les cas dynamiques reprenons le cas de la methode deRayleigh dans le cas mono-support (section E.2). Les valeurs maximales desefforts dans la structure sont associees aux valeurs maximales des deplacementsdes vitesses ou des accelerations, et donc de celles de αo et de ses derivees.C’est dans ce but qu’a ete defini le spectre de reponse Sd(ωo, ζo) qui n’estrien d’autre que le deplacement maximal d’un oscillateur simple de frequencepropre ωo et de taux d’amortissement ζo subissant une acceleration imposeeainc(t), soit :
maxt‖ubo‖ = ‖φo‖poSd(ωo, ζo) (E.106)
Remarquons que pour ωo >> ωl, nous retrouvons le cas pseudo-statiqueαo = ainc.
E.7.3 Recomposition modale
La donnee des spectres de reponse nous fournit donc une evaluationdu maxima des coefficients de participation modaux. Afin de passer auxmaxima des grandeurs mecaniques, on suppose qu’un signal sismique estproche d’un signal aleatoire observe sur une fenetre [O, T [. On sait alorsque l’esperance de la valeur maximale atteinte sur cet intervalle est propor-tionnelle a l’ecart-type et on deduit donc de la formule (E.88) une formulegenerale de combinaison des spectres de reponse :
maxt|ubj(x)|2 =
∑lii′
φij(x)φi′j(x)γii′lSdl(ωi, ζi)Sdl(ωi′ , ζi′)(E.107)
avec ωi et ζi les frequences propres et les vecteurs propres associes aux modesφij . Pour des frequences propres separees, on supposera γii′l = δii′ .
E.8 conclusion
Nous avons presente l’analyse des vibrations d’une structure soumise aun champ incident impose deterministe ou aleatoire a sa base ainsi que les

125
methodes de dimensionnement associees. Cette analyse suppose une absencede couplage entre le sol et la structure. Remarquons que cette hypothese estutilisee a deux niveaux et de facon en apparence contradictoire. En effet,ayant considere que la structure fonctionnait en deplacements imposes, noussupposons ainsi le sol infiniment rigide. Par ailleurs, lorsque le champ inci-dent a ete decompose sur une base de modes d’interfaces, par exemple lesmodes de corps rigide, nous avons vus apparaıtre un phenomene de filtrageque l’on peut justifier par une grande rigidite de la fondation par rapport ausol. Cette contradiction n’est qu’apparente car la sollicitation sismique, prin-cipalement constituee par un mouvement de translation n’est pas contrarieepar la rigidite de la fondation. Par contre ses fluctuations spatiales fonttravailler la fondation et sont donc empechees.
Il convient toutefois de quantifier l’approximation ainsi faite en compa-rant Kb, l’impedance de la structure vue de l’interface Σsf a Ks l’impedancedu sol qui sera definie au chapitre suivant. On donnera toutefois ici a titrede comparaison l’expression des rigidites statiques verticale Kv, horizontaleKh, de balancement Kr et de torsion Kt d’une fondation circulaire rigide derayon r reposant sur un demi-espace homogene de module de cisaillement µet de coefficient de Poisson ν :
Kv =4µr
1− ν(E.108)
Kh =8µr
2− ν(E.109)
Kr =8µr3
3(1− ν)(E.110)
Kt =16µr3
3(E.111)

Annexe F
Outils Mathematique
F.1 Introduction
Si la connaissance de comportements caracteristiques (localisation, reflexion,dispersion) tels que ceux examines dans la partie ?? est indispensable pourl’analyse qualitative de phenomenes ondulatoires complexes, il est indispen-sable de se doter de methodes numeriques efficaces pour une quantificationprecise de ces phenomenes.
Apres une analyse rapide du cadre mathematique et des difficultes as-sociees, nous presenterons un rapide panorama des methodes numeriquesdisponibles et nous developperons plus particulierement :
– les methodes spectrales,– les methodes d’equations integrales,– les methodes de sous-structuration dynamique.
F.2 Cadre mathematique
Nous reprenons ici les outils classiques d’analyse mathematique tels quedonnes dans [24] et l’on se referera a cet ouvrage ou bien a [37] pour desanalyses plus specifiques aux phenomenes propagatoire. Rappelons que noustravaillons ici dans le cadre du systeme de l’elasticite lineaire tel que donneau chapitre B. Dans ce cadre, les deux difficultes majeures sont :
– le caractere hyperbolique de l’operateur de l’elastodynamique, notesymboliquement ici −∆∗ + ∂tt (cf. chapitre ??) et n’imposant aucuneregularite particuliere a la solution,
– la nature non bornee du domaine d’etude.
F.2.1 Analyse temporelle
D’un strict point de vue mathematique, ces deux points ne constituentpas des obstacles majeurs et il est etabli [24] que les problemes dits de Cau-
126

127
chy (cf. ??) associes admettent des solutions uniques dans des espaces fonc-tionnels adaptes (des espaces de distributions). Malheureusement les outilsutilises sont proches de ceux presentes au chapitre ?? et comme mentionnedans ce chapitre sont peu exploitable d’un point de vue numerique pour desdimensions d’espace ≥ 2.
Remarquons toutefois un resultat essentiel : l’operateur de l’elastodynamiqueetant caracterise par une vitesse de propagation finie (cf chapitre ??), a toutinstant T il est possible, dans la mesure ou les sollicitations restent a sup-port borne en temps de restreindre l’analyse a un domaine fini, la difficulteessentielle etant alors de pouvoir discretiser ce domaine lorsque T devientgrand. L’emploi de conditions absorbantes [28] pour representer une par-tie du domaine devient souvent une alternative indispensable pour ce typede modelisation. Reste par ailleurs la difficulte d’obtenir une approxima-tion robuste et stable d’un operateur hyperbolique, ce point est aborde parexemple dans [24] [10] pour des methodes numeriques type elements finis[79], elements spectraux [15], differences finis. Des methodes d’elements defrontiere [14, ?] peuvent egalement etre utilisees.
F.2.2 Analyse en frequence
Afin de s’affranchir du caractere hyperbolique de l’operateur, et du faitde sa linearite, il est classique d’utiliser la transformation de Fourier parrapport au temps pour travailler sur la famille d’operateurs differentiels enespace −∆∗ − ω2Id parametree par la pulsation Ω (cf. chapitre B). Notonsque par cette transformation, la propriete precendente est perdue et il de-vient alors necessaire de travailler sur un domaine non-borne, les operateursassocies devenant non-bornes (et donc non continus). De plus, l’unicite de lasolution prealablement assuree par les conditions initiales n’est assuree qu’enfaisant appel a des conditions supplementaires appelees conditions de radia-tion (On trouvera au chapitre B la definition des condtions de Radiation deSommerfeld dans le cas d’un espace homogene).
Espaces Hloc Le cadre classique de travail pour ce type d’analyse sont soitles espaces de distribution (cas le plus general), soit les espaces C1 lorsqueles donnees possedent une regularite suffisante, soit les espaces de SobolevHloc
2 si des formulations variationnelles sont utilisees [73]. Notons toutefoisque ces espaces sont assez mal-pratiques numeriquement car ils ne possedentpas de normes associees permettant de controler les erreur d’approximation.De plus ce type d’analyse requiere systematiquement l’emploi de conditionsde radiation difficiles a exprimer dans des cas complexes.
1champs continus et de derives continues2le champ et ses derivees restent de carre sommable sur tout sous-domaine borne

128
Principe d’absorption limite Le principe d’absoption limite ?? fourniformellement un moyen de definir ces conditions de radiation. Schematiquement,il consiste a appliquer a l’equation en temps avec conditions initiales unetransformation de Laplace (cf. ?? [24]) de parametre p au lieu d’une trans-formation de Fourier et de faire tendre p vers iω.
Pour p fixe, l’operateur −∆∗+p2Id peut etre analyse dans les espaces deSobolev classiques Hm 3. On montre en particulier la coercivite4[37] de laforme bilineaire associee grace a la partie reelle du parametre de Laplace p.On notera que cette technique, a priori formelle est utilisee numeriquementpour traiter en frequence des problemes instationnaires (cf. ??).
De facon plus generale, cette technique revenant a ajouter une dissipa-tion artificielle dans le systeme5 n’est plus necessaire des que les materiauxpresentent effectivement de la dissipation (viscosite ou hysteresie). Remar-quons enfin que les Conditions de radiation de Sommerfeld donnees precedemmentreviennent a imposer un amortissement visqueux sur une frontiere repousseea l’infini.
Ainsi, mathematiquement il semble suffisant, moyennant l’utilisation d’unamortissement de se placer dans le cadre des espaces de Sobolev usuels et des-quels il est possible d’utiliser les techniques classiques d’analyse numeriqueet de deduire des resultats classiques sur la convergence des approximationsnumeriques. Toutefois notons que ces termes de dissipation font perdre lasymetrie de l’operateur6. Ce point ne constitue toutefois un obstable majeurque pour les methodes numeriques utilisant les proprietes des operateursauto-adjoints telles que les methodes de diagonalisation par recherche demodes propres. Les methodes de sous-structuration dynamiques presenteesdans cet ouvrage ?? ?? relevent de cette classe de problemes.
Toutefois, remarquons que si l’amortissement reste faible le volume de-vant etre discretise peut etre de tres grande taille ne resolvant en rienle probleme numerique. Pour cette raison nous developperons plus parti-culierement les methodes d’equations integrales (cf. 4) qui dans leur formu-lation variationelle [53] [32] [31] et moyennant des hypotheses de regularite
3Sous cette hypothese, la solution et ses derivees sont de carres integrables sur tout ledomaine non borne. Cette condition impose naturellement des conditions de decroissance al’infini ce qui formellement conduit au meme type d’analyse que sur un domaine borne. Enparticulier dans ce cadre on montre que l’operateur −∆∗+p2Id est continu. Physiquementon s’interesse particulierement aux champs a energie finie,i.e. de carres integrales pour lechamp et ses derivees premieres
4Il s’agit de la forme la plus faible de la coercivite pour une forme ssequilineaire a(u, v) :
|a(u, u)| ≥ ‖u‖2Hm
ne reclamant pas la symetrie de l’operateur5Cette dissipation est purement mathematique et ne modifie en rien les resultats tem-
porels6En fait l’operateur est complexe symetrique, mais il n’est pas hermitien, propriete
essentielle dans le cadre de l’analyse spectrale

129
sur le domaine d’etude [21] se rattachent naturellement a ces approches [40]bien qu’orginellement developpe dans le cadre des espaces de Holder [20].
Pour conclure cette section, remarquons que le principal desavantagede ces techniques tient au fait que certaines solutions des equations del’elastodynamique ne peuvent etre traitees dans ce cadre7. Schematiquement,remarquons que cette technique doit etre limitee aux cas de perturbationscompact [41] d’un probleme modele que l’on saura traiter par d’autres tech-niques, et plus particulierement les methodes de decomposition spectrale.
F.2.3 Analyses spectrales
On entend par analyses spectrales les methodes de traitement des equationsde l’elastodynamique utilisant des transformations par rapport aux variablesd’espace tirant partie de certaines de ses proprietes geometriques telles que :
– invariance par translation ??,– invariance par rotation,– periodicite [6],– separation de variables, ...,
tout comme le passage en frequence tirait partie de l’invariance du domained’etude par rapport au temps.
Le cadre mathematique naturel est celui des semi-groupes [24], les es-paces fonctionnelles etant souvent des espaces de distribution (Distributionstemperees pour les transformations de Fourier) souvent beaucoup moins res-trictifs que les espaces de Sobolev (cf. remarque ci-dessus).
Quoique restreint a des configurations geometriques particulieres, lesmethodes associees sont souvent les seules methodes disponibles pour trai-ter des domaines non bornes a frontieres ou heterogeneites egalement nonbornees. Par ailleurs les methodes de transformations numeriques de typeFFT les rendent tres competitives.
Notons que ces methodes peuvent etre utilisee en parallele des methodesdecrites ci-dessus. C’est en particulier l’approche communement adopteepour l’analysedes guides d’ondes ([?]) et les relations de dispersion associees.
On trouvera section ?? des elements concernant ces transformations etau chapitre ?? une application de ces techniques pour l’etude de la propa-gation des ondes dans un espace stratifie, et en particulier le calcul des solu-tions fondamentales associees utilisees ensuite dans le cadre d’une methoded’equation integrale.
7Les ondes planes par exemple. Ce point n’est par particulierement genant dans le casde la diffraction d’une onde plane sur un obstable borne, car le probleme pose en termesde champ diffracte ud = u−ui peut etre traite dans ce cadre. Par contre ce n’est plus lecas lorsque l’obstacle devient non-borne (cf. C ou le champs diffracte est une combinaisond’ondes planes)

130
F.2.4 Autres approches
Certaines methodes complementaires ont ete peu ou pas developpeesdans ce chapitre concernant en particulier :
– La theorie de la Diffraction [74],[75], [37],– les approximations hautes frequences [44] [60] [61] [7] [13],– la propagation en milieu aleatoire [69], [55].
et le lecteur pourra se reporter a la bibliographie. Celle-ci est bien sur non-exhaustive, ce chapitre n’ayant pour but que de donner quelques referencesconcernant l’analyse mathematique des problemes d’elastodynamique ainsique quelques methodes associees, utilisees a titres divers dans cet ouvrage.Notons que la bibliographie generale dans ce domaine est tres vaste quoiquerarement specifique a l’elastodynamique. On notera en particulier de nom-breuses methodes developpees en acoustique, electro-magnetisme ou bien enmecanique quantique8.
8L’equation de Schrodinger est une equation d’onde partageant un grand nombre desimilarites avec les equations de l’elastodynamique

Annexe G
Outils mathematique envibration des structures
Nous rappelons ici quelques techniques de base et des resultats generaux[24, ?, ?] en vue de l’etude d’un probl‘me de viration d’une structure borneenotee Ω soumise a un deplacement impose sur l’interface Σ. Rappelons toutd’abord que les equations verifiees par le champ de deplacement u n’ontun sens en terme de fonction que pour des champs u∗ deux fois derivables.Cette condition est assez restrictive pour l’approximation de la solution.Pour cette raison on utilisera une forme plus faible de ces equations enutilisant le principe des puissances virtuels. On montrera ensuite l’interet decette formulation pour l’approximation numerique et le controle de l’erreur.
G.1 Principe des puissances virtuelles
Considerons un champ de vitesses v s’annulant sur Σ, multiplions lescalairement a l’equation (E.3) et integrons sur la structure. Par integrationpar partie et prise en compte des conditions aux limites nous obtenons ennotant f = −ρbu
inc :
−∫
Ωdiv σ(u) · vdV +
∫Ω ρbu · vdV =
∫Ωf · vdV
−∫∂Ωtb(u) · vdS +
∫Ωσ(u) : ε(v)dV +
∫Ω ρbu · vdV =
∫Ωf · vdV
0 +∫
Ωσ(u) : ε(v)dV +
∫Ω ρbu · vdV =
∫Ωf · vdV
Cette derniere equation a un sens pour u et v derivables par morceaux parrapport a x, deux fois derivables par rapport a t et d’energie finie i.e. :
Ep(u) + Ec(u) ≡ 1/2∫
Ωσ(u) : ε(u)dV + 1/2
∫Ω
ρbu · udV < +∞ (G.1)
131

132
On note V l’espace des fonctions verifiant ces conditions et Vo le sous espacede V dont les elements s’annulent sur Σ. Ces espaces sont munis de la normede l’energie. On montre [24] alors un resultat essentiel pour l’approximationnumerique : Toute suite convergente de champs de V (res. Vo) converge versun champ appartenant a cet espace. On montre egalement que la solutiondu probleme d’origine appartient a cet espace, qu’elle depend continuementdu chargement f suppose d’energie finie et qu’elle est solution du problemevariationnel suivant :
Trouver u ∈ Vo tel que pour tout v ∈ Vo :∫Ωσ(u) : ε(v)dV −
∫Ωf · vdV +
∫Ω
ρb∂ttu · vdV = 0 (G.2)
G.2 Approximation
L’approximation du probleme precedent s’effectue en cherchant un ap-proximation u dans un sous espace Vo de Vo de dimension finie par rapportaux variables d’espace. On est alors conduit a le resolution d’un systemed’equations differentielles du second ordre en temps de la forme :
Ku + Cu + Mu = f (G.3)
G.3 Estimation d’erreur
On montre ensuite que l’erreur e definie comme la difference entre lasolution exacte u et l’approximation u verifie les equations d’origine avec leresidu r comme terme de chargement1 :
div σ(e)+r = ρ∂tte dans Ω (G.4)e = 0 sur Σ
tb(e) = 0 sur Γe(x, 0) = ∂te(x, 0) = 0 dans Ω
r = f − div σ(u) + ρb∂ttu dans Ω (G.5)
Cette erreur est bien sur inconnue, mais on en deduit par continuite de lasolution de ces equations vis-a-vis du chargement que sa norme energetique‖e‖Vo est majoree par la norme du residu r definie dans l’espace des char-
1On ignore ici l’erreur sur les conditions initiales et les conditions aux limites et onsuppose le systeme sans amortissement.

133
gements admissibles V ′o , le dual de Vo, par :
‖e‖Vo ≤ c(T )‖r‖V ′o (G.6)
‖r‖V ′o = supv∈Vo
∫ T0
∫Ω r · vdV dt
‖v‖≤ ‖r‖ (G.7)
‖r‖ ≡(∫ T
0
∫Ω|r|2dV dt
)1/2
(G.8)
Cette definition de la norme du residu dans V ′o est assez mal pratique par rap-port a la norme usuelle ‖r‖ qui souvent est utilisee. Toutefois, cette dernieren’est pas toujours bornee en particulier lorsque la solution approchee n’estpas deux fois derivable et elle est dans la majorite des cas trop exigeante.Ainsi, en dehors des estimations d’erreur fondees sur cette norme ‖r‖, ontrouvera des indicateurs d’erreur fondes sur des valeurs particulieres des vdans l’expression (G.7). Il s’agit uniquement d’indicateurs puisqu’il n’est paspossible d’en deduire une majoration de l’erreur. En particulier, on remarqueque pour v = v ∈ Vo on a en particulier :∫
Ωr · vdV = 0 (G.9)
ce qui indique que u est la meilleur approximation dans l’espace Vo. Pourobtenir une estimation d’erreur a partir de l’expression (G.7) on definit atout instant t un champ particulier uo(r) comme le relevement statique duresidu r :
div σ(uo(r))+r = 0 dans Ω (G.10)uo(r) = 0 sur Σ (G.11)
tb(uo(r)) = 0 sur Γ (G.12)
et l’on montre alors simplement que :
‖r‖V ′ ≡∫ T
0Ep(uo(r))dt (G.13)
Ce champ n’est generalement pas connu explicitement, et seule une approxi-mation uo(r) de ce champ est disponible pour fournir un indicateur. Onconsidere souvent qu’un modele element fini relativement raffine fournit unetelle approximation.
G.4 Quotient de Rayleigh
Nous concluons cette section avec la notion de quotient de Rayleigh carnon seulement ce dernier joue un role essentiel dans l’analyse spectrale des

134
operateurs auto-adjoints, mais il fournit egalement des elements pour l’ap-proximation numerique. Pour un champ v de Vo independant du temps, lequotient de Rayleigh Q(v) est defini comme la ratio entre energie potentielleet energie cinetique par :
Q(v) =Ep(v)Ec(v)
=
∫Ω σ(v) : ε(v)dV∫
Ω ρbv · vdV(G.14)
On montre en particulier que la borne inferieur de ce quotient est le carreede la premiere pulsation propre de la structure, la valeur pour laquelle cetteborne est atteinte etant le mode propre associe note ϕo :
ωo = infv∈Vo
Q(v) = Q(ϕo) (G.15)
Cette propriete se generalise aux autres frequences et modes propres sous laforme :
ωA = infVA⊂V
supv∈VA
Q(v) = infv∈V ⊥A−1
Q(v) = Q(ϕA) (G.16)
VA etant un sous-espace de dimension A de Vo et V ⊥A−1 etant le sous espacede Vo perpendiculaire a l’espace engendre par les A − 1 premiers modespropres.
Une definition equivalente peut etre faite en utilisant l’espace V pourconstruire les modes propres et les frequences propres avec des conditionsde surface libre sur Σ.

Annexe H
Transformations de Fourier
Definitions
Definition 2 Transformation de Fourier-Laplace :Pour toute fonction f de la variable t, on definit sa transformee de
Fourier-Laplace Fα(f) comme la fonction de la variable ω definie par :
Fα(f)(ω) =1√π
∫ +∞
−∞f(t)eiωαtdt (H.1)
avec ωα = ω + iα. La transformation inverse F−1α est quant a elle definie
pour une fonction a(ω) par :
F−1α (f)(t) =
1√π
∫ +∞
−∞f(ω)e−iωαtdω (H.2)
Dans le cas particulier ou α est nul, on retrouve alors la transformee deFourier usuelle et le probleme pose en frequence correspond au problemestationnaire usuel de pulsation ω. L’utilisation de cette transformation pourα different de zero, ne correspond plus a l’etude d’un etat stationnaire.Neanmoins elle est souvent utilisee dans le but particulier de s’affranchir dedifficultes numeriques apparaissant sur l’axe reel.
Proprietes
Sont regroupees ici quelques proprietes essentielles de la transformationde Fourier que l’on trouvera demontrees en particulier dans [24, 65]. Lepremiere propriete concerne l’existence de la transformee de Fourier directeet inverse et son aptitude a reconstruire la fonction de depart.
Propriete 1 La transformation de Fourier est definie d’apres 2 pour toutefonction f integrable, la transformation de Fourier inverse existe dans lesmemes conditions et reconstruit la fonction f presque partout pour une fonc-tion f continue et differentiable par morceaux.
135

136
Ainsi l’emploi de la transformation de Fourier permet de traiter des fonctionsplus singulieres que des fonctions usuellement utilisees dans les methodes va-riationnelles qui doivent generalement etre continues1 et de carre integrable.Cette propriete permet de plus de fixer le cadre des fonctions sur lesquellesune transformation de Fourier numerique pourra etre appliquee.
La seconde propriete importante connue sous le nom d’egalite de Parceval-Bessel consiste a remarquer que la Transformation de Fourier conserve lanorme L2 :
Propriete 2 Pour toute fonction f de carre integrale :∫ +∞
−∞ffdt = 1/π
∫ +∞
−∞f fdω (H.3)
designant le conjuge d’un nombre complexe.
Cette propriete permet d’etendre la transformation de Fourier a l’espace desDistributions temperees contenant en particulier les fonctions a croissanceslentes [63].
Definition 3 La transformee de Fourier T d’une distribition temperee estdefinie pour toute fonction ϕ a infiniment differentiable et a decroissancerapide :
〈T, ϕ〉 = 1/π〈T , ϕ〉 (H.4)
〈·, ·〉 designant le produit de dualite.
Enfin, la propriete essentielle de la transformation de de Fourier vis-a-visde son utilisation pour la resolution d’equations aux derivees partiels est dediagonaliser l’operateur de derivation ∂t au sens ou pour tout fonction oudistribution temperee f on a par simple integration par partie :
Propriete 3∂tf = −iωαf (H.5)
Ainsi pour l’operateur d’inertie usuelle ρ∂tt devient −ω2α.
Transformation de Fourier en espace
La transformation de Fourier peut bien entendue etre appliquee a desvariables d’espaces B ??. On donne ainsi tout de suite l’expression de cettetransformation dans le cas multi-dimensionnel :
1Les fonctions de l’espace de Sobolev H1 doivent etre continue en dimension 1, cettepropriete est perdue pour des dimensions d’espace superieures. Toutefois les fonctions debases appartenant a cette espace et utilisees dans les approximations numeriques sonttoujours continues

137
Definition 4 Transformation de Fourier multi-dimensionnel : Pour toutchamp scalaire ou vectoriel u a croissance lente a l’infini de la variable x =(x1, ..xn) ∈ Rn, on definit sa transformee de Fourier multi-dimensionelleFα(u) comme le champ de la variable k definie par :
Fα(u)(k) =∫
Rnu(x)e−ik·xdx (H.6)
et la transformation inverse du champ u par :
F−1α (u)(k) =
1(2π)n
∫Rnu(k)eik·xdk (H.7)
On notera ici que l’on a volontairement change la convention de signe parrapport a la transformation en temps de facon a obtenir dans le cas d’unetransformation mixte espace-temps un terme de la forme ei(k·x−ωt) caracterisantune onde se propageant dans la direction k.
On notera enfin que la definition de Fourier-Laplace en espace qui a prioria peu d’interet pour traiter des domaines infinis 2 peut trouver toutefois sonapplication dans deux situations particulieres :
– pour le calcul de la Transformation de Hankel ??– en utilisant la decomposition de toute fonction definie sur R en deux
fonctions, l’une paire et une l’autre impaire pouvant etre definies surR+ et admettant donc une transformation de Fourier-Laplace3.
Moyennant ces definitions il est aise de calculer la transformation de Fourierdes operateurs classiques grad , div , rot et ∆ :
(∂ju) = −iξju (H.8)
(div u) = −iξ · u (H.9)
(∆u) = −|ξ|2u (H.10)(grad div u) = −(ξ.u)ξ (H.11)
Transformation de Fourier-Laplace inverse numerique
La litterature fourni de nombre techniques de transformation de Fourierrapide [11] et on trouvera en particulier dans [57] de nombreuses applica-tions et precaution d’utilisation. Dans la mesure ou dans ces techniques, lafonction f est en fait echantillonnee par rapport a ω, on note que la tran-formation de Fourier-Laplace inverse s’exprime comme une transformationde Fourier numerique usuelle, suivie d’une multiplication par une fonctionexponentielle, si bien que :
f(t) = eαtF−1(f) (H.12)2elle serait adaptee a des demi-espace3On notera que cette technique revient a deformer le contour d’integration dans la
transformation de Fourier

138
La transformation de Fourier inverse est effectuee de facon tres efficace aumoyen d’une FFT [11] classique disponible sur la majorite des ordinateursainsi que dans les bibliotheques mathematiques usuelles, quant a la multi-plication par le facteur eαt, elle ne pose aucune difficulte informatique. Parcontre, le choix du facteur numerique α est delicat dans la mesure ou si ilest pris trop grand, il risque de creer des perturbations dans le signal dufait de la presence du terme exponentiel. Un bon compromis semble corres-pondre a une valeur de α definie en fonction de tmax, le temps maximumd’observation par :
α = 1/tmax (H.13)
Synthese d’une solution temporelle a partir de la fonction dereponse en frequences
Une fois obtenue la solution du probleme pour un echatillonnage enfrequence determine et pour un chargement unitaire, il suffit pour obtenirla reponse transitoire de multiplier la reponse en frequence par le spectre deFourier du signal caracterisant le changement et d’effectuer une transforma-tion de Fourier inverse. On a alors :
u(x, t) = F−1(u(x, ω)s(ω)) (H.14)
s(ω) etant la transformation de Fourier du signal de la source.Du fait de l’utilisation d’une FFT numerique, les resultats obtenus peuvent
comporter des evenements a caractere non causal qui viennent perturber lesignal. Ces parasites ont pour origine un phenomene de repliement de spectrecouramment rencontre en traitement du signal. Le signal devant apparaıtreapres la fenetre de temps choisie apparaıt en fait au debut de celle-ci.
Repliement de spectre Afin de s’affranchir de ces problemes de re-pliement de spectre aussi appelle phenomene de Gibbs [11], deux remedespeuvent etre employes. Le premier consiste a allonger de facon artificielle lafenetre d’observation et le second consiste a caler cette fenetre sur le tempsd’arrivee de la premiere onde. Le temps maximum d’observation est a priorifixe par la valeur du pas d’echantillonnage en frequence dω, par la relation :
tmax =2π
dω
Ce pas d’echantillonnage peut etre diminue a volonte en utilisant unemethode d’interpolation, allongeant ainsi dans le meme rapport le tempsd’observation et evitant les repliements parasites.
La seconde methode consiste a affirmer qu’il ne peut exister aucun signalau point x pour une source placee au point ξ avant un temps to(x) definipar :

139
to(x) =x− ξ
cmax
Ainsi, au lieu de calculer la reponse au point x sous la forme (H.14), oncalculera :
u(x, t− to(x)) = F−1u(x, ω)s(ω)exp(iωto(x))
La fenetre de temps couvre alors la partie du signal reellement significa-tive et annule tout signal non compris dans cette fenetre.
Filtres On remarque que la methode de translation de la fenetre de tempsintroduite pour eviter le repliement de spectre s’interprete simplement commel’application d’un filtre particulier sur la reponse en frequences. Pour tenircompte d’un filtre en frequence quelconque f(ω) qui peut dependre du char-gement mais aussi du point d’observation, il suffit donc d’ecrire :
u(x, t− to(x)) = F−1(u(x, ω)s(ω)eiωto(x)f(ω))
Deconvolution : application en genie parasismique L’emploi de cefiltre est particulierement utile en genie parasismique. En effet, la donneefournie a l’ingenieur est un accelerogramme s(ω) dit en ”champ libre”, c’esta dire en un point xo du site en l’absence de la structure. Il ne s’agit pas icireellement d’un chargement, mais de la reponse en un point du domaine pourun chargement donne. Il convient donc de retrouver ce chargement a partirde cette donnee par une methode dite de deconvolution. En fait on est obligede postuler un type de chargement (Ondes planes a incidence verticale parexemple) que l’on suppose tout d’abord unitaire et d’effectuer un calcul dechamp libre pour obtenir une reponse uo(xo, ω). L’amplitude a(ω) du modede chargement est alors determinee par : a(ω) = s(ω)uo(xoω). Par ailleurs,la reponse en tout point une fois la structure prise en compte dans le calculet pour le meme chargement unitaire etant uo(xoω), le resultat recherchesera donc :
u(x, t) = F−1(s(ω)uo(xoω))
s(ω) etant le filtre a utiliser dans le post-traitement des resultats.

Bibliographie
[1] R. Apsel and J. Luco. Torsional response of a rigid embedded founda-tion. J. Engrg. Mech. Div. ASCE, 102 :957–970, 1976.
[2] D. Aubry. Sur une approche intEgrEe de l’interaction sismique sol-structure. Revue FranAaise de GEotechnique, 38 :5–24, 1986.
[3] D. Aubry and J. Crepel. Interaction sismique fluide-structure : Appli-cation aux barrages voute. In Actes 1er Colloque francais de GenieParasismique. A.F.P.S., 1986.
[4] E. Balmes. ModEles analytiques rEduits et modEles expErimentauxcomplets en dynamique des structures. MEmoire d’habilitation ‡ dirigerdes recherches soutenue ‡ l’UniversitE Pierre et Marie Curie le10 juillet1997, 1995.
[5] P. Banerjee and R. Shaw. Developments in Boundary Element Methods.Elsevier Applied Science, Barking, Essex, U.K., 1979.
[6] A. Bensoussan, J. L. Lions, and G. Papanicolaou. Asymptotic analysisfor periodic structures. North–Holland, Amsterdam, 1978.
[7] N. Bleistein. Mathematical methods for wave phenomena. AcademicPress, New York, 1984.
[8] S. D. Bogan and M. K. Hinders. Interface effects in elastic wave scat-tering. Lecture notes in physics. Springer-Verlag, 1994.
[9] Bonnet M. Methode des equations integrales. CNRS Editions/Eyrolles,Paris, 1995.
[10] Brezzi F. & K.J. Bathe. A discourse on the stability conditions formixed finite element formulations. Comp. Methods Appl. Mech. Engrg.,82 :27–57, 1990.
[11] E. O. Brigham. The Fast Fourier transform. Prentice-Hall, 1974.
[12] Bui H.D., B. Loret & M. Bonnet. Regularisation desequations integrales de l’elastostatique et de l’elastodynamique.C. R. Acad. Sci. Paris, t. 300(Serie II) :633–636, 1985.
[13] R. Burridge. Some mathematical Topics in seismology. Lecture notes.Courant-Institute of Mathematical sciences, New York University, 1976.
140

141
[14] C.A.Brebbia, L. Wrobel, and J. Telles. Boundary element techniques.Theory and application in engineering. Springer-Verlag, 1984.
[15] C. Canuto, M. Hussaini, A. Quarteroni, and T. A. Zang. Spectral me-thods in fluid dynamics. Springer Verlag, New York, 1988.
[16] F. Chapel. Boundary element method applied to linear soil-structureinteraction on a heterogeneous soil. Earthquake Engrg. Struct. Dyn.,15 :815–829, 1987.
[17] F. Chapel and C. Tsakaladis. Computation of the Green’s functions ofelastodynamics for a layered half space through a Hankel transform, ap-plications to foundation vibration and seismology. In I. Kawamoto, edi-tor, Numerical Methods in Geomechanics, pages 1311–1318. Balkema,1985.
[18] A. Chopra, P. Chakrabarti, and S. Gupta. Earthquake response ofconcrete gravity dams including hydrodynamic and foundation interac-tion effets, 1980.
[19] R. Clough and J. Penzien. Dynamics of structures. McGraw-Hill, NewYork, 1975.
[20] D. Colton and R. Kress. Integral equation methods in scattering theory.Pure and applied Mathematics. Wiley and Sons, 1983.
[21] Costabel M. Boundary integral operators on Lipschitz domains : ele-mentary results. SIAM J. Math. Anal., 19(3) :613–626, 1988.
[22] T. Cruse. Boundary element analysis in computationnal Fracture. Klu-wer Academic Publishers, 1988.
[23] T. Cruse, A. Pifko, and H. Armen. Advanced topics in boundary elementanalysis, volume 72. AMD-ASME, New York, 1985.
[24] R. Dautray and J. Lions. Analyse mathEmatique et calcul numEriquepour les sciences et les techniques. Masson, Paris, 1984-1985.
[25] F. de Barros and J. Luco. Identification of foundation impedance func-tions and soil properties from vibration tests of the Hualien containmentmodel. Soil Dyn. Earthquake Engrg., 14 :229–248, 1995.
[26] A. Der Kiureghian. A coherency model for spatially varying groundmotion. Earthquake Engng. and Struct. Dyn., 25 :99–111, 1996.
[27] J. Dominguez. Boundary elements in dynamics. Comp. Mech. Publ.,Southampton, 1993.
[28] B. Engquist and A. Majda. Radiation boundary conditions for acousticand elastic wave calculations. Comm. Pure Appl. Math., 32 :313–357,1979.
[29] M. Geradin and D. Rixen. Mechanical Vibrations. Theory and Appli-cation to Structural Dynamics. John Wiley & Wiley and Sons, 1994,also in French, Masson, Paris, 1993.

142
[30] R.-J. Gibert. Vibrations des Structures. Editions Eyrolles, Paris, 1988.
[31] Giroire J. Etude de quelques problemes aux limites exterieurs etresolution par equations integrales. These de doctorat d’. . .tat, Uni-versite P. & M. Curie - Paris VI, Paris, septembre 1987.
[32] Giroire J. & J.C. Nedelec. Numerical solution of an exterior Neumannproblem using a double layer potential. Math. Comp., 32(144) :973–990,1978.
[33] J. Gutierrez and A. Chopra. A substructure method for earthquakeanalysis of structures including structure-soil interaction. EarthquakeEngineering and Structural Dynamics, 6 :51–69, 1978.
[34] H. Hao. Characteristics of torsional ground motion. Earthquake Engrg.Struct. Dyn., 25 :599–610, 1996.
[35] H. Hao and S. Zhang. Spatial ground motion effect on relative displace-ment of adjacent building structures. Earthquake Engrg. Struct. Dyn.,28 :333–349, 1999.
[36] C. Harris. Shock and Vibration Handbook. MacGraw-Hill Pub. Co.,New York, N.Y., 1988.
[37] C. Hazard and M. Lenoir. Modelisation et resolution des probemes dediffraction. ENSTA et DEA de Mecanique Paris VI, Palaiseau, 1998.
[38] M. Hoshiya and K. Ishii. Evaluation of kinematic interaction of soil-foundation systems by a stochastic model. Soil Dyn. Earthquake Engrg.,2(3) :128–134, 1983.
[39] D. Inman. Engineering Vibration. Prentice-Hall, Englewood Cliffs, N.J.,1994.
[40] C. Johnson and J. Nedelec. On the coupling of boundary integral andfinite element methods. Math. Comp., 35 :1036–1079, 1980.
[41] T. Kato. Perturbation theory of linear operators. Sringer-Verlag, Berlin,1976.
[42] E. Kausel and R. Peek. Dynamic loads in the interior of a layeredstratum : an explicit solution. Bull. Seism. Soc. Am., 72 :1459–1481,1982.
[43] E. Kausel and J. Roesset. Dynamic stiffness of circular foundations. J.eng. Div. ACSE, CI :771–785, 1975.
[44] J. B. Keller and S. I. Rubinow. Asymptotic solution of eigen problems.Annals of Physics, 9 :24–75, 1960.
[45] V. Kupradze. Dynamical problems in Elasticity. Progress in Solid Me-chanics. North Holand, 1963.
[46] H. Lamb. On the propagation of tremors over the surface of an elasticsolid. Phil. Trans. R. Soc. Lond., 203A :1–42, 1904.

143
[47] A. E. H. Love. The mathematical theory of elasticity 4th ed. DoverPublications, Inc., New-York, 1944.
[48] J. E. Luco. Linear soil-structure interaction. Technical Report UCRL-15272, Lawrence Livermore National Laboratory, 1980.
[49] J. E. Luco and R. Wetsmann. dynamic response of circular footing. J.appl. Mech. ASME, XCVII :1381–1895, 1971.
[50] Luco J.E. Impedance functions for a rigid foundation on a layeredmedium. Nuclear Engrg. and Design, 31 :204–217, 1974.
[51] Luco J.E., Apsel R.J. On the Green’s functions for layered media : part1 and 2. Bull. Seism. Soc. Amer., 73-4 :909–931, 1982.
[52] L. Meirovitch. Elements of Vibration Analysis. McGraw-Hill Inc., NewYork, N.Y., 1989.
[53] J. Nedelec. Approximation des equations integrales en mecanique et enphysique. Technical Report ? ?, Centre de Mathematiques Appliquees,Ecole Polytechnique, Palaiseau, 1977.
[54] Y. H. Pao and C. C. Mow. Diffraction of elastic waves and dynamicstress concentrations. Technical report, The Rand Corp., 1973.
[55] G. Papanicolaou. Mathematical problems in geophysical wave propa-gation. In Documenta Mathematica, proc. Int. Congress of Mathema-ticians, Extra Volume ICM 98, volume I, pages 241–265, Berlin, 1998.
[56] A. Pecker. Dynamique des sols. Presse de l’Ecole National des Pontset Chaussees, Paris, 1984.
[57] J. Quiblier. Propagation des ondes en gEophysique et en gEotechnique :ModElisation par mEthodes de Fourier, Volume 1 et 2. Edition Technip,Paris, 1997.
[58] L. Rayleigh. The theory of sound, volume I II. Dover Publications,Inc., New-York, 1945.
[59] F. Rizzo, D. Shippy, and M. Rezayat. A boundary integral equationmethod for radiation and scattering of elastic waves in three dimensions.Int. J. Num. Meth. Eng., 21 :115–129, 1985.
[60] J. Sanchez-Hubert and E. Sanchez-Palencia. Vibration and coupling ofcontinuous systems, asymtotic Methods. Sringer-Verlag, Berlin, 1989.
[61] Sanchez-Palencia E. Non-homogeneous media and vibration theory.Springer Verlag, Berlin, 1980.
[62] S. Savidis and C. Vrettos. Dynamic soil-structure interaction for foun-dations on nonhomogeneous soils. In G. Duma, editor, Earthquake En-gineering, Proc. 10th European conf., 28 August – 2 September 1994,Wien, Austria, pages 599–609, Balkema, Rotterdam, 1994.
[63] L. Schwartz. ThEorie des distributions. Hermann, Paris, 1966.

144
[64] C. Soize. Processus stochatiques et methodes de resolution des problemesaleatoires. Ecole Centrale de Paris, Chatenay-Malabry, 1986.
[65] Soize C. Methodes mathematiques en analyse du signal. Masson, Paris,1993.
[66] G. G. Stokes. Trans. Camb. Phil. Soc., IX,1, 1849.
[67] R. Stoneley. Elastic waves at the surface of separation of two solids.Proc. R. Soc. Lond., 106A :416–420.
[68] C. Tsakalidis. Diffraction d’ondes sismiques sur les structures sur pieuxet fonctions de Green du sol multicouche. PhD thesis, Ecole Centralede Paris, Chatenay-Malabry, july 1985.
[69] B. Uscinski. The elements of wave propagation in random media.McGraw-Hill, New York, 1977.
[70] E. Vanmarcke. Probabilistic modeling of soil profiles. ASCE J. Geotech.Engrg., 103(GT11) :1227–1246, 1977.
[71] Vrettos C. Time-harmonic Boussinesq problem for a continuously non-homogeneous soil. Earthquake Engrg. Struct. Dyn., 20 :961–977, 1991.
[72] Wang F. & F. Gantenbein. Calculation of foundation response to spa-tially varying ground motion by finite element method. Communicationinterne, CEA-CEN / Saclay, 1995.
[73] Washizu K. Variational methods in elasticity and plasticity, 2nd Edi-tion. Pergamon Press, 1975.
[74] C. H. Wilcox. Scattering theory for the d’Alembert Equation in exteriorDomains. Sringer-Verlag, Berlin, 1975.
[75] C. H. Wilcox. Scattering theory for diffraction gratings. Sringer-Verlag,Berlin, 1980.
[76] J. Wolf. Dynamic soil-structure interaction. Prentice-Hall, EnglewoodCliffs, 1985.
[77] J. Wolf and G. Darbre. Dynamic stiffness matrix of soil by the boundary- element method : conceptual aspects. Earth. Eng. and Struc. Dyn.,12 :385–400, 1984.
[78] H. Wong and J. E. Luco. Dynamic response of rigid foundations ofarbitrary shape. Earth. Eng. Struct. Dyn., 4 :579–587, 1976.
[79] O. Zienkiewicz. The finite element method in engineering science. McGraw Hill, 1979.