Embed Size (px)
Citation preview

North East Pacific Time-series Underwater Networked Experiment (NEPTUNE):Power System Design, Modeling and Analysis
Aditya Upadhye

Outlineo NEPTUNEo Power system requirementso Two design alternatives
Version 1 Version 2
o Cable analysiso Modelso Simulation resultso Conclusions and future work

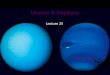
NEPTUNE
Explorer Plate
Pacific Plate
Gorda Plate
Juan de Fuca Ridge
North American Plate
Nedonna Beach
Junction Box
Cable
study area
Plate
Juan de Fuca

Science requirements Communication bandwidth - Gb/s Power – 200kW Reliability Robustness of design Thirty year lifetime Maintenance and support

Power System Design Basic tradeoffs
Frequency: ac versus dc Network: radial versus interconnected Loads: series versus parallel
Shore station supply at 10kV, 200kW Max. current-carrying capacity = 10A User voltage = 400V / 48V Max. power at each node = 10kW

Power System Design Protection
Sectionalizing circuit breaker Breaker control
Monitoring and control Current – voltage measurements State estimation
Shore station control hardware / software

Power System Design: Version 1

Version 1 Circuit
Node dc-dc converterand controlelectronics
Backbone cable
Spurcable
CircuitBreaker
Back-biaseddiodes
Science Loads
NODE
10kV
400V

DC Circuit Breaker
Need During initial energization For fault isolation
Required featuresTo force a current zero and minimize arcingTo prevent breaker restrikes

DC Circuit Breaker
R1 R2
S1
S2 S3
S4
C
Open Circuit

DC Circuit Breaker
R1 R2S1
S2 S3
C
S4
Soft Closing

DC Circuit BreakerClosed circuit
S2 S3
R1 R2
S1 S4
C

DC Circuit BreakerCapacitor charging
S2
R1 R2S1
S4
C
S3

DC Circuit Breaker
R1 R2S1
S2 S3
S4
C
Capacitor discharging

DC Circuit BreakerHardware prototype
125V, 5A breaker circuit Breaker control
MOSFETs drive the switch solenoids Opto-isolator between logic circuit and
driver circuit Control logic has a counter, which
continuously cycles through the breaker operations

DC Circuit Breaker
Continuous Voltage: 125V Continuous Current: 4.5A Total Breaker Cycles: 125,000 Normal cycle switching frequency: 20Hz Maximum cycle switching frequency:
100Hz Maximum tested voltage: 200V Maximum tested current: 5A
Hardware prototype test results

Power System Design: Version 2

Version 2 Circuit
Node dc-dc converterand controlelectronics
CircuitBreaker
Back-biaseddiodes
Science Loads
NODE
BRANCHINGUNIT
10kV
400V

Branching Unit
BUController
1
BUController
2
Science Load Dummy Load
I 1 I 2
I 3
I1 I2 I3
S1
S2
S3
S5 S6
12V 12V
Z1 Z3 Z2
Solenoid of S1 Solenoid of S2Solenoid of S3
I 4
L2L1
I4 I1 I2 I3 I4

Series Power Supply
•Indigenous power supply for each BU
•Less reliance on node converter
•Use of zener diodes in reverse region
•Back-to-back zener diodes
12V
2-5A
Solenoid # 1
Solenoid # 2
2-4A
12V 0V
0.5A
0.5A

Modes of Operation Normal Fault Fault-locating Restoration
Special case System startup

Normal mode
Fault?
Systemshutdown
Yes
No
Fault locatingmode
StateEstimation
Is faultlocated?
Systemshutdown
Restorationmode
Raisevoltage to
10kV
No
Yes
System startup
1. Current measurement atshore2. Communication from nodesexperiencing voltage collapse3. PMACS determining nodesthat drop-out.
PMACS determiningpresence of fault and its
location

Comparison of Version 1 and Version 2

Conventional approach to power system design
Based on the philosophy that cable faults are rare but possible
Version 1 Version 2
Response to a fault is at the local level by the nearest circuit breaker
Response to a fault is at the system level by the shore station controls
Circuit breaker is complicated with many components
Complexity of circuit breaker is greatly reduced
Fault current is interrupted; arcing and restrikes are possible
Fault current is not interrupted; arcing and restrikes are not possible
Single node failure can cause failure in a large section of the network
Single node failure is not catastrophic for the system as that node only will be out of service
Reliability is increasedReliability is low

Electromagnetic Transients Program (EMTP)

Alternate Transients Program

ATP Theory
o ATP is a universal program system for digital simulation of transient phenomena of electromagnetic as well as electromechanical nature
o With this digital program, complex networks and control systems of arbitrary structure can be simulated
o Trapezoidal rule of integration

Cable Parameters

ALCATEL OALC4 Cable
SteeltubeØ: 2.3 mm
Optical
fibers
Compositeconductor
Steel wiresstrand
Thixotropic
J elly
Insulating sheath Ø 17mm

Inductance Calculations The generalized formulae were applied to the
OALC4 cable The core (steel) current caused flux linkages
within a) the core b) the sheath c) the insulation The sheath (copper) current caused magnetic
flux linkages within: a) the sheath b) the insulation

Inductance Calculations
T i e
Where T is the total flux linkage associated with the conductor, i is the flux linkage internal to the conductor, and e is the flux linkage external to the conductor
T
cableL
i
Where icable is the total current in the cable

Results
Theoretical values
ATP values ALCATEL values
R (/km) 1.03 1.03 1.00
L (mH/km) 0.3947 0.3948 0.4
C (F/km) 0.179 0.179 0.2

Simulation Models

Version 1: Opening of Circuit Breaker
t = (topen-t)
Switch closed
t = topen
Switch open: initial arcing
t =( topen +t)
Capacitor charging

Simulation of Restrikes
RESTRIKE!!!
Initial Arcing Periodtopen
Vmax

Restrikes: Simulation Circuit
10kVDC
250 kmCable
250 kmCable
S1
S3S2
S4Rd
C
Rs
Load Z1
NODE A
Sf
NODE B
Load Z2

Capacitor Current
1
2
3
Restrike
No Restrike
1
2

Capacitor Voltage
1
2
1
2
3
Restrike
No Restrike

Simulation Results
Maximum voltage across switch
Travel time of switch
Minimum value of capacitor to prevent
restrikes (F) 15 kV 5 ms 2
15 kV 10ms 5
15 kV 18 ms 10
25 kV 15 ms 1
25 kV 18 ms 1
25 kV 20 ms 1

Current Limiting Operation The shore station power supplies are
rated at 200kW, 10kV The steady-state system current =
10A Under certain conditions, the system
current may increase due to Cable faults Topology changes Load fluctuations

Current Limiting Operation The system current is limited to a value
below 10A using the control circuitry in the shore station
This is done by dropping the shore voltage which in turn reduces the current
The control action is initiated only for steady-state overcurrents and not transient overcurrents.

Fault Analysis

Version1: Simulation Circuit
100km
DC
Shorecurrentlimiting
NODE A
LOAD Z1
100km NODE B
LOAD Z2
50km
50km
LOAD Z3Sf

Results of Current Limiting: Shore Output voltage and Current
1
2
3
1
3
2
Current
Voltage

Voltage and Current at Node 2: No Current Limiting
1
2
3
1
2
3
Current
Voltage

Capacitor Current of Node 2
1 2
3

Version 2: Fault Studies A pre-insertion resistance may be placed at
the shore station to limit the fault current This resistance will limit the fault current
before the shore controls take the appropriate mode-dependant control action
Three controllable parameters in simulations:
A. Value of pre-insertion resistanceB. Response time of control circuitryC. Distance of fault from the shore station

Simulation Circuit
DC
'X'km
BU A
LOAD Z
100km
BU B
LOAD ZDC
V1V2
900km
Sf
Pre-insersion
resistance
X=100km/1200km

Results: Vary Response Time
0
100
200
300
400
500
600
0 10 20 30 40 50 60
Response time of shore (ms)
I^2
t v
alu
es
Faultdistance=100km
Faultdistance=1200km

Results: Vary Fault Distance
0
50
100
150
200
250
0 200 400 600 800 1000 1200 1400
Distance of fault from shore (km)
Peak C
urr
en
t Tra
nsie
nt
(A)
0
100
200
300
400
500
600
0 200 400 600 800 1000 1200 1400
Fault distance from shore.
I^2t
valu
es.

Conclusions A sub sea observatory NEPTUNE is the first of its kind and
will open up new and exciting areas of scientific research The NEPTUNE power system implements a ‘dc network’ Version 1 dc breaker is designed and a hardware
prototype was built in lab Version 2, the preferred design choice is philosophically
different from conventional terrestrial power systems Transient studies of the system is performed using EMTP
for worst-case scenarios from the point of view of component design and fault analysis
Theoretical analysis of the cable was performed and EMTP models were developed for the above

Future Work DC breaker prototype for Version 2 Control and monitoring systems for the above
using microcontroller and/or array logic A comprehensive transient model for the
entire NEPTUNE network which is generic enough to simulate any fault type and any operating scenario