Embed Size (px)
Citation preview

E L S E V I E R Signal Processing 38 (1994) 429 440
SIGNAL PROCESSING
Nonlinear fuzzy operators for image processing
Fabrizio Russo*, Giovanni Ramponi
Dipartirnento di Elettrotecnica Elettroniea In[ormatica, Universith degli Studi di Trieste. Via A. Valerio 10, 1-34127. Trieste. Italy
Received 15 June 1993; Revised 5 October 1993
Abstract
The formal rules which describe the behavior of a 'globally fuzzy' technique for image processing are described in this paper. The analysis is then particularized, in order to get a deeper insight, to the case of a very simple operator of this family, putting to evidence the different sources of nonlinearity which are involved. Some examples briefly illustrating the achievable performances complete the presentation.
Zusammenfassung
In dieser Arbeit werden die formellen Regeln zur Beschreibung des Verhaltens einer 'globally fuzzy' Technik zur Bildverarbeitung angegeben. Zur Vertiefung des Verstfindnisses wird dann in Detail auf den Fall eines sehr einfachen Operators dieser Familie eingegangen, wobei die verschiedenen vorhandenen Quellen yon Nichtlinearitfiten hervor- gehoben werden. Einige Beispiele, welche die erzielbaren Ergebnisse illustrieren, vervollst/indigen die Darstellung.
R~sume
Les r6gles pour la description d6taill6e du functionnement d'une technique "totalment floue' appliquee au traitement d'images sont pr6sent6es dans cet article. Pour aider une plus compl&e compr6hension, l'analyse est conduite dans le cas d'un tres simple op6rateur flou qui peut montrer les origines des diff6rent effects nonlin6aires. Des exemples illustrant les prestations qui peuvent ~tre obtenues compl&ent la pr6sentation.
Key words: Image processing; Fuzzy sets; Image enhancement; Edge extraction
1. Introduction
Since their first description in the famous paper by Zadeh 1-12], fuzzy techniques have been used rather sporadically in the field of image processing. A number of relevant contributions appeared in the
*Corresponding author. Fax: +39-40-6763460. E-mail: rus- fab(az univ.trieste.it; ramponi@ univ.trieste.it.
0165-1684/94/$7.00 © 1994 Elsevier Science B.V. All rights reserved SSDI 0 1 6 5 - 1 6 8 4 ( 9 4 ) 0 0 0 1 1 - N
area of two-dimensional (2-D) pattern recognition [4, 5]: a collection of them is reproduced and pres- ented in the recently published book by Bezdek and Pal [2]. It should be observed that some of these papers deal assertedly with image enhancement, but in fact only the viewpoint of the preprocessing needed to obtain better segmentation results is con- sidered. Still more recently, some related papers have been presented during the latest F U Z Z - I E E E Conferences. As an example, in [3] a very simple

430 F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440
image enhancement technique, gray-level mapping, is chosen; its parameters are set using a genetic algorithm incorporating a fuzzy fitness function. A different approach is proposed in [-1], where a fuzzy-based algorithm for the enhancement of multiple-object images is presented which modifies and generalizes the method introduced by Pal and Rosenfeld [7]. The image is treated as an array of 'fuzzy singletons'. Each pixel x(m, n) is associated with a value of membership ma(x(m, n)) relative to a brightness level belonging to the range of possible luminances [0, L - 1].
In this classical literature dealing with fuzzy im- age processing, the basic (even if often implicit) assumption is that an ideal image should be formed by uniform objects with continuous contour. Thus, to process the data it is assumed that adjacent pixels having similar brightness will belong to the same object and that an object can be identified by maximizing the 'compactness' of a group of adjac- ent pixels. Such criteria are sensible and effective in a pattern recognition environment, but cannot be applied directly when trying to enhance visually the quality of an image; indeed, they would tend to yield a binarized [1] or, at least, a piecewise uni- form image.
In particular, it is relevant to observe that the fuzzy singleton approach neglects the very relevant information coming from the spatial correlation among the pixel values. Some methods presented in the literature in fact can be found which use such a spatial information, but this is done in a non- integrated way, separating it from the fuzzy envi- ronment [6]. On the contrary, the techniques we have recently proposed [8, 10, 11] are based on a different viewpoint. We take into account the local correlation in the data by applying the fuzzy rules directly on the pixels which lie within a small mask centered on the pixel to be processed. In this sense, our approach is more similar to conventional filtering; on the other hand, it is thoroughly innova- tive due to the fact that each processed value is obtained only through a set of ad hoc fuzzy rules. Our method was first presented in [8], where a soft- ware tool for an easy and interactive design of the rules was described; then, in [10, 11] the potentiali- ties of the approach were evinced from its use in image smoothing, sharpening and edge extraction.
In the present paper we analyze the nonlinear behavior of this new family of fuzzy operators focussing, in particular, on the characteristics of a fuzzy filter we developed for image smoothing. This paper is organized as follows. Section 2 pres- ents the general architecture of the fuzzy image processing system; Section 3 describes the proposed fuzzy processing in detail, pointing out its peculiar nonlinear behavior; Section 4 analyzes the fuzzy operator for image smoothing; Section 5 extends the study to other fuzzy operators we developed for pseudo-high-passing filtering, sharpening and edge extraction. Finally, Section 6 reports the con- clusions.
2. A globally fuzzy image processor
All the operators which are presented in this paper are based on a 3 x 3 or 5 × 5 data window scanning the input image. Moreover, even if this is not the only possible choice (see [11]), all the input data in the following are the luminance differences x i between each pixei of the window and the pixel located at the window center ('target pixel'). This is the so-called 'relative in the antecedents' approach. The output of the fuzzy processing is the quantity y which, depending on the particular application, determines the final result, i.e. the new luminance value of the target pixel. With respect to the output, we have two possibilities, i.e. 'relative' or 'absolute' in the consequent. In the former case, y is a correct- ing term added to the original target pixel; in the latter, it is the new value taken by the target pixel. Fuzzy rules link conditions about the x/s (anteced- ents) to conclusions about y (consequent). For example,
if xl is large positive and x2 is zero and ... and xM is large negative then y must be small positive,
where zero, small positive, large positive and large negative are suitable fuzzy sets defined in the do- main of the luminance differences D. Each fuzzy set A can be defined in general by a membership func- tion mA(x) which maps D to the real interval [0, 1]. The fact that an input xj can belong to different sets with different membership degrees is one of the basic principles of fuzzy processing.

F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440 431
If we are dealing with N rules acting on M vari- ables, we can represent any operator's rulebase as follows:
IF (xl is All)/x(x2 is A12)/x ..' A(XM is A1M) THEN (y is B1),
IF (xl is A21)A(x2 is A22)/x ... A(XM is A2M) THEN (y is B2),
IF (xl is A~I)^(x2 is ANE)A .." /X(X~ is ANM) THEN (y is BN),
ELSE (y is Bo),
where Ai~ is the fuzzy set associated to thejth input in the ith rule, B~ is the fuzzy set associated to the output in the same rule, Bo is the set used in the ELSE-rule and /x briefly indicates the fuzzy AND operator which generally implies the evaluation of the minimum of the operands. The ELSE-rule is unique for the overall rulebase; its behavior will be more precisely defined in the following. Now, it suffices to observe that it becomes strong when all the rules give weak responses; thus, it assures that the fuzzy inference is successfully executed for any possible input data set. In a more formal way, the relation between the set of input variables xj and the corresponding output value y can be expressed, in general, by the cascade of the following five expressions:
2i = min {mA,j(Xj); j = 1 . . . . . m },
2 0 = m i n { 1 - 2 i ; i = 1 . . . . ,N},
~+~ (xmin{2,, mB,(X)})dx C i ~
I2 (min{2,, m.,(x)}) dx co
- + ~ . f . Pi ": J_ ~ (mln~/ti, rrtn,(x)} ) dx,
i = l , . . . , N , (1)
(2)
i = o . . . . . N,(3)
i= O, ... ,N, (4)
y = Y,\o (5) N ~i=o Pi
Let us examine them in detail. Expression (1) com- pactly defines a group of N relations which yield, for each value of i, the strength level 2i which is obtained for the ith rule in presence of the actual
input vector X = {x j}. Obviously, nonlinear effects are intrinsic both in the definition of the fuzzy sets and in the MIN function. In fact, it is clear that the shape of the fuzzy sets in the antecedent and con- sequent parts of the system characterizes the performed filtering function. Each membership function mA,j(X), as anticipated, can be defined in general as a nonlinear mapping of the input vari- able x into the range [0, 1]; for triangular-shaped sets, such a function is described by a piecewise- linear expression, while more complex expressions are involved in the cases of smoothly changing sets (e.g. the S- or ~-shaped sets used in the fuzzy literature).
Relation (2) defines the strength level 2o of the ELSE-rule, defined here as rule 'zero'. Since, in general, mNOTA(X) = 1 -- mA(X), it is clear that re- lationship (2) performs an ELSE-type action by combining the 'weaknesses' 1 - 2i of all the other rules. Due to the presence ofa MIN operator again, the resulting effect is nonlinear.
Again for the ith rule, relations (3) and (4) give the weight Pi and the center ci of the portion of the consequent fuzzy set Bi which is selected by the value of 2i. It should be noticed that both relation- ships are strongly nonlinear. As an example, even in the simplifying hypothesis that the output fuzzy set has an isosceles triangular shape, relationship (4) gives a quadratic law.
Finally, relation (5) describes the defuzzifying process which combines the effects of all the differ- ent rules into an output value y. This output value is a combination of the abscissae of the centers c~'s of the output fuzzy sets associated with the different rules; the above-defined pi's are used as weights for such a combination. It should be observed that (5) is linear with respect to the c,.'s but, again, is non- linear with respect to the p;'s.
A slightly more complex set of relationships must be adopted if a fuzzy rulebase is structured as a combination of more subrulebases. A subrulebase is defined here as a group of rules having the same consequent set. In other words, a subrulebase groups rules having different input conditions but a common consequent action, thus permitting a more suitable management of different processing strategies. The strength of a subrulebase is evalu- ated in our approach by combining the strengths of

432 F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440
the component rules by means of fuzzy OR oper- ators, which generally involve the evaluation of the maximum of the operands. Let us suppose that the overall rulebase is composed of a set of Ns subrulebases and let Sk be the kth subrulebase of this set (1 ~< k ~< Ns); let Ri be the ith rule of the rulebase. Then relationships (1)-(5) become
"~k = max{min{mA,j(xj); j = 1 . . . . . M} V i: Ri ~ Sk},
k = 1 . . . . , Ns, (6)
20 = min{1 - ~.k; k = 1, ... ,Ns}, (7)
Ck=~+~(xmin{2k , m n , ( x ) } ) d x ,
f_+~ (min{2k, m n , ( x ) } ) d x
k = 0 . . . . . Ns, (8)
Pk = _ ~ (min{2k, mn, (x)}) dx,
k = 0 . . . . . Ns, (9)
Y _ E~=o CkPk, (10) Ns
~k=O Pk
where 2k is the strength of the kth subrulebase, Bi k denotes its consequent fuzzy set and B~ o = Bo is the consequent fuzzy set of the ELSE-rule.
3. A case study: the basic fuzzy smoother
Maybe the simplest operator of the presented family is a smoother which tends to reduce the luminance differences between a pixel of the image and its neighborhood. As it will be seen in the following, it can be described by only two simple rules, and it is thus easily analyzed by particulariz- ing the above-defined relations in order to get a more direct perception of its behavior. On the other side, it should be mentioned that the perfor- mance of this operator can be improved by select- ing a more accurate and ample rulebase I-9].
We adopt triangular-shaped fuzzy sets whose membership functions are two-parameter functions m' defined by the following relationship:
0 x<~ c - - w , m'(x;c ,w)= ( w - - l x - - c [ ) / w c - - w < x < ~ c + w ,
0 x > ~ c + w . (11)
Thus, by assuming mn,(x) = m'(x; ci, wi), relation- ship (4) becomes
pi = 2wi21(1 - 21/2), i = 0 . . . . , N, (12)
and (3) is automatically satisfied by the parameter cl in m'(x;ci,wi). It should be noticed that (12) represents a quadratic law.
As mentioned above, the basic smoother includes only two rules, similar to those of the fuzzy oper- ator presented in [8]. In the case addressed here (relative in the consequent), the output y of the fuzzy processing determines the quantity which must be added to the target pixel P in order to obtain the final result P', as defined by
P' = P + qy , (13)
where q (0 < q ~< 1) is a scaling factor. A value q 4:1 can be conveniently used in order to take care of the different ranges of the input and output vari- ables. It must be pointed out that the adoption of q does not represent a critical issue. It gives more flexibility to the design of the fuzzy system by offering an easy way for reducing the total number of necessary fuzzy sets for a particular task. In fact, it can be observed that all the techniques and ex- perimental results presented in the following sec- tions could be easily reformulated choosing q = 1 and suitably changing the parameters of the in- volved fuzzy sets. Our choice (q = 0.5) has allowed us to adopt the same fuzzy sets for the inputs and the output, and hence to simplify the notation. The fuzzy sets and rules of the smoother are represented in Fig. 1.
As it can be seen, the operator acts on a window of 5 x 5 elements; other choices could of course be made, but this one seems the most effective for the real-world images we have experimented with. The rulebase involves three fuzzy sets, i.e. medium nega- tive ( N ), zero ( Z ) and medium positive ( P ). Each rule is represented in a compact graphical form which clearly relates each xj and y term to the correspond- ing fuzzy set. It should be noticed that only the consequent set (Z) must be specified in the ELSE- rule, since its strength 20 is indirectly evaluated from the strengths of the THEN-rules. The action of the operator is based on a fuzzy model of addi- tive noise which identifies as noisy any pixel which satisfies, in a fuzzy sense, the following statements:

F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440 433
RULEB~E
Membership
THEN N Z P 1.t - -"I ' [ ] 1 RULE
2nd ~ THEN RUI~ mml~ [~ 0 , ' | I '
~255 o wo 255
Else ELSE ,= _, RULE mmm~ [] Luminance differences
Fig. 1. F u z z y sets a n d rules o f the bas ic s m o o t h e r .
- its luminance value differs from that of its neigh- bor pixels;
- its neighborhood is quite uniform. Due to the effectiveness of the fuzzy approach, only two rules are required in order to implement the above-mentioned statements. The first rule of Fig. 1 addresses the case of negative noise samples de- tected when all the pixels of the window are brighter than the target pixel, i.e. when the corres- ponding luminance differences xj are all medium positive. In a very similar way the second rule deals with the case of positive noise samples. In both cases the rules act on the consequent term in order to make the output pixel luminance more similar to those of the neighboring pixels.
It is very relevant to observe that, despite its simplicity and its effectiveness in attenuating noise, the basic smoother also has a strong edge-preserv- ing action. In fact, some antecedent conditions of the THEN-rules can be weakly satisfied in the presence of image contours, thus inducing the ac- tion of the ELSE-rule. Since the ELSE-rule in- volves the fuzzy set zero (Z), it leaves the target pixel fuzzily unchanged. The obtainable perfor- mance is illustrated in Fig. 2.
The original 'Pentagon' image of 256 x 256 pixels with 256 gray levels (Fig. 2(a)) is degraded by uni- formly distributed additive noise whose maximum amplitude is 32 (Fig. 2(b)). The result of the applica- tion of the basic smoother is shown in Fig. 2(c). As a comparison, Fig. 2(d) shows the result yielded by a more complete fuzzy operator whose rulebase includes, in addition, 48 fuzzy rules that take care of
the contour geometry and extend the smoothing action also to the areas where large changes of luminance are present I-9]. As a consequence of the edge-preserving effect mentioned above, in fact, such regions tend to remain noisy after processing by the basic smoother. Thus, other rules are neces- sary which can be activated by specific patterns of pixels representing sections of possible object con- tours. Having in mind this geometrical require- ment, the generation of an additional set of rules becomes a very simple and straightforward process. Let us consider the six rules represented in Fig. 3: each rule is devoted to the detection of a different pixel structure (main pattern). These six main pat- terns constitute the basis for the development of the overall set of 48 additional rules. Indeed, the oper- ator symmetry requires that six more similar struc- tures be considered by exchanging the roles of the P and N fuzzy sets. Moreover, the operator iso- tropy requires, for each main pattern, the further introduction of its three 90k degree rotated ver- sions. As a result, we have a total of 6.2-4 = 48 additional rules. The choice of a more or less com- plete set of main patterns can depend on the ap- plication. We found that the above-mentioned set can represent a good compromise between the complexity of the filter and the quality of the results in the treatment of real images.
It is not the purpose of the present paper to compare the results which are offered by the fuzzy approach to those yielded by classical techniques; however, it can be interesting to examine briefly the performances of a linear 3"3 low-pass filter and of

434 F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440
Fig. 2. Performances yielded by the fuzzy smoother and other techniques (see text).

F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440 435
(IX) (in) (Pc)
(v) (vI) (vii)
Fig. 3. Example of rules which take care of the contour geo- metry.
a median operator having the same size (9 points) when they are applied to the data in Fig. 2(b). The obtained images are, respectively, shown in Figs. 2(e) and (f); it is quite apparent that both the linear and the median filters are not able to reach the same noise-cancellation capability as the fuzzy method, and at the same time they blur the picture details more than the fuzzy method does.
We can now particularize the general analysis presented in Section 2 to the case of the basic smoother. We suppose that all the fuzzy sets have isosceles triangular shape; the ELSE set is centered on the zero input and has width Wo; the two T H E N sets are symmetrically placed with their centers at the abscissae __+ c and have the same width w (see Fig. 1). For two rules, N = 2 and the consequent computed at each step of the algorithm will depend only on the two present values of 21 and 22 (see (1)); indeed, 2o in (2) is a function of 21 and 22. If we substitute (12) in (5) we can easily obtain an expres- sion for the output:
c[21(2 - 2 1 ) - 22(2 - 22)]
y =
21(2 - - ~ , ) + )~2(2 - - 22) + W ° ( l _ ~ ) w
21 ~> 22,
c [ 2 1 ( 2 - 2 , ) - 22(2 - 22)]
(14)
21(2 - 21) + 22(2 - 22) + w°(1 - 22 z) w
21 ~< 22.
Notice that the absolute values of the consequent fuzzy set widths are not relevant for the processing.
Once 21 and 2 2 have been evaluated, the correction imposed on the output pixel is related only to the ratio Wo/W. On the other hand, of course, the shapes of the fuzzy sets used in the antecedent terms dir- ectly affect the values of 21 and 22.
It is interesting to examine the behavior ex- pressed by relation (14) as a function of the strength of each of the two rules. Fig. 4 shows y versus all the possible values 0. . . 1 of 2, and 22. Some observa- tions can be done:
(i) y = 0 for all 2, = 22; this is to be expected, as there should be no correction to the output value when the two above-mentioned opposing rules are satisfied with the same degree of cer- tainty;
(ii) the correction y is large when only one of the two rules is strongly activated, indicating that a certain type of neighborhood has been identi- fied by the algorithm;
(iii) for a given difference 21 - 22, the output cor- rection is larger when the average (21 + 22)/2 is smaller (look at the slope of the surface along its horizontal diagonal). Indeed, the defuzzify- ing process takes into account the areas of a portion of the consequent fuzzy sets, as im- plied in Eq. (14); when these areas are larger, the effect of an unbalance in the 2's is smaller. This mechanism is a reasonable one; in fact, if the two rules governing the system have been correctly designed, it should never happen that 2~ and 2 2 a re both large, as this would yield contradictory information. If, on the contrary, some design fault is present, the system protects itself by not taking any action in presence of such contradictory indications.
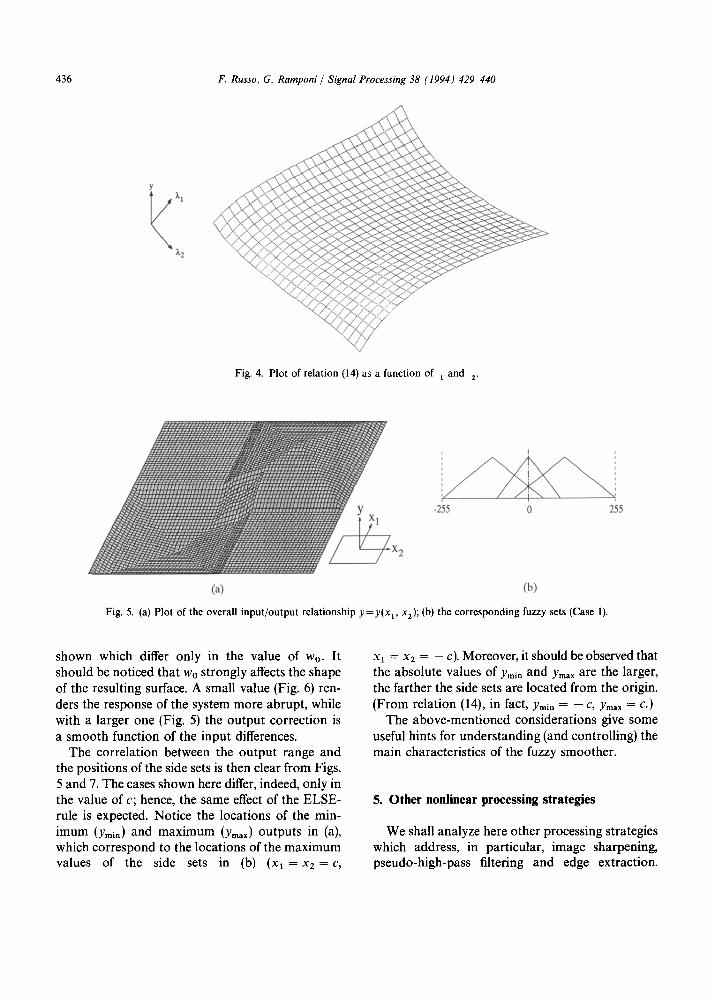
In order to illustrate graphically the nonlinear behavior of the overall input/output relationship, some examples are given in Figs. 5-7 for the case of two input variables xl and x2. Each input variable ranges from - 2 5 5 to 255. The input/output rela- tionship y = y(xl, x2) is represented in the form of a surface for three different choices of fuzzy set parameters. In all cases, (a) represents the in- put/output relationship and (b) the corresponding fuzzy sets. Fuzzy sets in (b) are represented in the same interval [ -255 , 255].
The effect induced by the ELSE-rule is eviden- tiated in Figs. 5 and 6, where two simple cases are
436 F. Russo, G. Rarnponi / Signal Processing 38 (1994) 429-440
Fig. 4. P lo t o f r e la t ion (14) as a func t ion of i a n d 2.
, I
-255 0 255
(a) (b)
Fig. 5. (a) Plot of the overall input/output relationship y=y(xl, x2); (b) the corresponding fuzzy sets (Case 1).
shown which differ only in the value of Wo. It should be noticed that Wo strongly affects the shape of the resulting surface. A small value (Fig. 6) ren- ders the response of the system more abrupt, while with a larger one (Fig. 5) the output correction is a smooth function of the input differences.
The correlation between the output range and the positions of the side sets is then clear from Figs. 5 and 7. The cases shown here differ, indeed, only in the value of c; hence, the same effect of the ELSE- rule is expected. Notice the locations of the min- imum (Ymin) and maximum (Ymax) outputs in (a), which correspond to the locations of the maximum values of the side sets in (b) (xl = x 2 = c,
X 1 = X 2 = - - C). Moreover, i t s h o u l d b e o b s e r v e d t h a t
the absolute values of Ymin and Ymax are the larger, the farther the side sets are located from the origin. (From relation (14), in fact, Ymi. = -- C, Ymax = C.)
The above-mentioned considerations give some useful hints for understanding (and controlling) the main characteristics of the fuzzy smoother.
5. Other nonlinear processing strategies
We shall analyze here other processing strategies which address, in particular, image sharpening, pseudo-high-pass filtering and edge extraction.

F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440 437
-255 0 255
(a) (b)
Fig. 6. (a) Plot of the overall input/output relationship y=y(x t, x2); (b) the corresponding fuzzy sets (Case 2).
i I i
-255 2~5
(a) (b)
Fig. 7. (a) Plot of the overall input/output relationship y=y(x 1, x2); (b) the corresponding fuzzy sets (Case 3).
Basic operators for all three cases are represented in Table 1. Although the addressed tasks are rather different one from each other, the fuzzy processing mechanism is basically the same in all cases, thus offering a unified approach to deal with a variety of image processing applications.
In fact, only the rulebase and the final relation- ship which links y to P ' depend on the particular application. Again, the overall nonlinear behavior is the same as the one described in Section 4.
5.1. The basic sharpener
The basic sharpener involves only two THEN- rules (see Table 1) which aim at increasing the luminance differences instead of reducing them as in the case of the basic smoother. For this reason the sharpening rulebase includes the same anteced- ent clauses as the basic smoother, but with ex- changed consequent clauses. In this case a 3 x 3 window suffices. The relationship which links y to

438 F. Russo, G. Ramponi / Signal Processing 38 (1994) 429--440
@
@
N
@
@
0
m "N
II
+
II
- I-
II
w ~
A
v
. . . . . c,i
Z
t-,i
1,1
N
[] []
•••
[] []
[] [] • N [ ] ~ N N
[] [] []
[] [] []
•••
N N

F. Russo, G. Ramponi / Signal Processing 38 (1994) 42~440 439
P' is
P' = P + qYsharp- (15)
Considering the different role of the consequent sets, the output relationship becomes in this case
- c[21( 2 - )~x) -- )~2(2 - - 22) ' ]
2 1 ( 2 - 21) + 2 2 ( 2 - 22) + w°(1 - 22 ) W
21 >--22,
Ysharp :
- - C [ ~ 1 ( 2 - - ~ 1 ) - - f i 2 ( 2 - - ~ 2 ) ]
2,(2 - Aa) + A2(2 - 22)-+- w°(1 - 222 ) IA'
(16)
Although the parameters c, w and Wo can be differ- ent in the two cases, it should be noticed that in the particular case they are equal, we have
Ysharp : - - Y . . . . th, (17)
where y . . . . th briefly indicates the result given by (14).
5.2. The basic pseudo-high-pass fiher
The relationship which links y to P' for the case of the pseudo-high-pass filter is
P' = Lo + qYhigh-p . . . . (18)
where Lo is an offset level which is generally half the luminance range. The general description is the same as in the previous example, and if the fuzzy set parameters do not change, we have
Yhigh-pass -~- Ysharp" (19)
5.3. The edge extractor
A fuzzy edge detector algorithm was presented in [11]; it offered good performances but was excess- ively complicated, as 16 rules were necessary. We introduce here a novel operator which is able to yield even better results with a smaller rulebase (observe the result presented in the image at the
bottom of Table 1). Such an operator is capable of dealing with all the typical edges found in an image. Fed with smooth (sigmoidal), step and roof edges, it yields results comparable to those of the well- known Sobel operator. On the other hand, its sensi- tivity to noise is high, and an improved version is presently under study. The rulebase is composed of only four THEN-rules whose antecedent clauses aim at detecting the contours of the image by ex- ploiting the opposite effects of the fuzzy sets called equal (E) and different (D). The consequent clauses produce high luminance values when image con- tours are detected and low luminance values in all other cases, as an effect of the ELSE-rule.
The relationship which links y to P' is, in this c a s e
P' = qYedge" (20)
It should be noticed that the antecedent (V-shaped) set D acts like the complement of the set E and it is not triangular. However, since the consequent clauses involve only triangular-shaped fuzzy sets, the corresponding consequent action can again be described by means of the simplifying hypotheses made in Section 4. Since in this case ca = c, Co = 0, )q = 2, 20 = 1 - 2 1 ~-- 1 - 2, the value o fy is given by the following relationship:
/~2 _ _ 22 (21)
1 + 22 - 2 2 wo W
6. C o n c l u s i o n s
In this paper we have analyzed the nonlinear behavior of a recently presented class of fuzzy oper- ators for image processing. General equations describing the overall fuzzy processing have been derived; modified equations for the cases in which a large number of rules is needed in order to obtain the desired performance have been proposed too. For obtaining a deeper insight of the behavior of the operator, the same equations have been par- ticularized for a simple noise smoother using two rules; in this case, indeed, a simple two-dimensional representation of the action of the technique can be given. It has also been shown that other different

440 F. Russo, G. Ramponi / Signal Processing 38 (1994) 429-440
processing tasks can be dealt with by the same fuzzy mechanism and thus within the same theore- tical framework.
Many practical experiences have shown that it is relatively easy to design a fuzzy processor satisfying well-defined requirements; however, it should be noticed that in general a tuning method should be adopted if one wants to determine the optimum set parameters for a specific application. A well-suited tuning technique can be based on Genetic algo- rithms; some first results about this issue are dis- cussed in [9] and are a subject of present studyl
Acknowledgments
This work has been supported by the European Research Project ESPRIT BRA NAT 7130. The authors would like to thank the anonymous re- viewers for their help in improving the quality of this presentation.
References
[1] O.K. AlShaykh, S. Ramaswamy and H.-S. Hung, "Fuzzy techniques for image enhancement and reconstruction", Proc. 2nd IEEE lnternat. Conf. on Fuzzy Systems, F U Z ~ IEEE '93, San Francisco, CA, USA, 28 March-1 April 1993, pp. 582-587.
[2] J.C. Bezdek and S.K. Pal, Fuzzy Models for Pattern Recog- nition, IEEE Press, New York, 1992.
[3] D. Bhandari, S.K. Pal and M.K. Kundu, "Image enhance- ment incorporating fuzzy fitness function in genetic algo- rithms", Proc. Second IEEE Internat. Conf. on Fuzzy Systems, FUZZ-IEEE '93, San Francisco, CA, USA, 28 March 1 April 1993, pp. 1408-1413.
[4] R. Krishnapuram and J.M. Keller, "Fuzzy set theoretic approach to computer vision: an overview", Proc, 1st In- ternat. Conf. on Fuzzy Systems, FUZZ-IEEE '92, San Diego, 8 12 March 1992, pp. 135-142.
[5] S.K. Pal, "Fuzzy sets in image processing and recognition", Proc. 1st lnternat. Conf. Fuzzy Systems, FUZZ-IEEE "92, San Diego, 8-12 March 1992, pp. 119-126.
[6] S.K. Pal and R.A. King, "Image enhancement using smoothing with fuzzy sets", IEEE Trans. Syst. Man Cyber- net., Vol. SMC-11, No. 7, July 1981, pp. 494-501.
[7] S.K. Pal and A. Rosenfeld, "Image enhancement and tresholding by optimization of fuzzy compactness", Pattern Recog. Lett., Vol. 7, No. 2, February 1988, pp. 77-86.
[8] F. Russo, "A user-friendly research tool for image process- ing with fuzzy rules", Proc. 1st IEEE Internat. Conf. on Fuzz)' Systems, FUZZ IEEE "92, San Diego, CA, USA, 8 12 March 1992, pp. 561-568.
[9] F. Russo, "A new class of fuzzy operators for image pro- cessing: design and implementation", Proc. 2nd IEEE lnternat. Conf. on Fuzzy Systems, FUZZ-IEEE '93, San Franscisco, CA, USA, 28 March-1 April 1993, pp. 815-820.
[10] F. RussoandG. Ramponi, "Fuzzy operator for sharpening of noisy images", lEE Electron. Lett., Vol. 28, No. 18, August 1992, pp. 1715-1717.
[11] F. Russo and G. Ramponi, "Working on image data using fuzzy rules", Proc. 6th European Signal Processing Conf., EUSIPCO-92, Brussels, Belgium, 24-27 August 1992, pp. 1413 1416.
[12] L.A. Zadeh, "Fuzzy sets", Inform. Control, Vol. 8, 1965, pp. 338 353.


























![[168]a Methodology to Design Stable Nonlinear Fuzzy Control Systems](https://img.dokumen.tips/doc/110x75/55cf854a550346484b8c62c2/168a-methodology-to-design-stable-nonlinear-fuzzy-control-systems.jpg)

